ОБЛАСТЬ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Изобретение относится к системе для крепления железнодорожного устройства и, в частности, стрелочного перевода. Оно также относится к транспортному средству, в частности, грузовому вагону, включающему в себя такое устройство для крепления. Наконец, оно относится к способу для крепления рельсового устройства и, более широко, к способу транспортировки рельсового устройства.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
[0002] Патент FR3024470 раскрывает грузовой вагон для транспортировки железнодорожного устройства, содержащий опорную платформу для железнодорожного устройства, имеющую опорную поверхность для железнодорожного устройства, причем опорная платформа выполнена с возможностью перемещения между горизонтальным положением погрузки и наклонным положением транспортировки. Рельсовое устройство прикреплено к опорной платформе с помощью механизма крепления, состоящего их отдельных зажимов, распределенных по всему железнодорожному устройству, помещенных между шпалами рельсового устройства и платформой.
[0003] Однако, такой способ крепления, который в частности прост, на самом деле имеет недостаток состоящий в необходимости доступа к платформе для погрузки для того, чтобы затянуть зажимы рукой, а следовательно, до того как рельсовое устройство закреплено. А значит, нужны специальные меры предосторожности для работы, как на этапах погрузки, так и этапах выгрузки для обеспечения персональной безопасности тех, кто работает.
[0004] Для того, чтобы прикрепить рельсовое устройство к платформе без доступа к платформе, компания MATISA SA с 2006 года предлагает на рынке, по меньшей мере, один механизм крепления рельсового устройства, содержащий крепежные штанги, которые на одном конце имеют крюки, предназначенные для зацепления с частью основания рельса рельсового устройства. Каждая штанга установлена с возможностью перемещения во втулке, шарнирно соединенной с платформой таким образом, чтобы вращаться вокруг продольной оси, которая перпендикулярна штанге. Таким образом, оператор может маневрировать штангой как рычагом, удерживая ее за ее свободный конец, противоположный крюку, чтобы принудить ее поворачиваться до достижения крюком основания рельса, при этом регулируют рабочую длину штанги за счет перемещения во втулке. Как только крюк зацепится с основанием рельса, остается лишь блокировать перемещение штанги во втулке для того, чтобы зафиксировать крюк и рельсовое устройство в положении относительно платформы. Длина штанги позволяет оператору работать со стороны платформы, оставаясь на некотором расстоянии от крюка. Таким образом, описанная система очень похожа на систему, раскрытую в публикации WO2014154624 А1. Она эффективна, но не позволяет получить высоких значений зажимных усилий между крюком и рельсовым устройством, в частности, поскольку усилие, приложенное крюком к основанию рельса при размещении и фиксации, проходит в направлении штанги, а следовательно, с высоким значением горизонтальной составляющей, которая стремится заставить рельсовое устройство сместиться на платформе. Кроме того, такое устройство сложно для моторизации.
КРАТКАЯ СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] Изобретение направлено на преодоление недостатков предшествующего уровня и создание системы крепления железнодорожного устройства, которая обеспечивает простое и надежное обращение с железнодорожным устройством и которая проста для моторизации.
[0006] Чтобы достичь этого, согласно первому аспекту изобретения предложена система крепления железнодорожного устройства, содержащая
- опорную платформу, выполненную с возможностью размещения в положении погрузки, и
- по меньшей мере, один механизм для крепления железнодорожного устройства к опорной платформе, выполненный с возможностью перехода из нефиксированного состояния в фиксированное состояние.
[0007] Механизм крепления содержит
- по меньшей мере, один направляющий путь,
- по меньшей мере, одну каретку, направляемую направляющим путем по траектории, которая, когда опорная платформа находится в положении погрузки, расположена в эталонной плоскости, причем каретка перемещается по направляющему пути с помощью моторизованного или немоторизованного, предпочтительно, самоблокирующегося приводного механизма,
- средство для блокирования каретки относительно направляющего пути,
- по меньшей мере, один крепежный элемент железнодорожного устройства, прикрепленный к каретке, и
- элементы для фиксации направляющего пути относительно платформы, причем элементы переходят из нефиксированного положения в фиксированное положение, когда механизм крепления переходит из нефиксированного состояния в фиксированное состояние при опорной платформе в положении погрузки, смещая направляющий путь вниз относительно опорной платформы.
[0008] Таким образом, перемещение крепежного элемента разделяется на, по меньшей мере, две составляющие, а именно, на горизонтальное перемещение каретки, несущей крепежный элемент, и направленное вниз вертикальное перемещение направляющего пути, направляющего каретку, хотя и очень малой амплитуды. Такое разделение обеспечивает крепление железнодорожного устройства к платформе в ходе процедуры, которая обладает рядом последовательных этапов, а именно, прежде всего посредством размещения крепежного элемента, которое включает в себя перемещение каретки по траектории, образованной направляющим путем, а затем, на втором этапе, фиксирования посредством нажатия направляющего пути вниз.
[0009] Опорная платформа является, предпочтительно, горизонтальной в положении погрузки. Однако, она может быть наклонной, причем такой наклон меньше, чем наклон в положении транспортировки. С опорной платформой связана эталонная плоскость, которая, предпочтительно, параллельна опорной платформе. Преимущественно, равнодействующая нагрузок, прилагаемых фиксирующим элементом к направляющему пути и фиксирующим элементам, не содержит составляющую для поступательного перемещения в эталонной плоскости.
[0010] Траектория каретки, определяемая направляющим путем, предпочтительно является прямой траекторией.
[0011] Каретка перемещается по направляющему пути с помощью моторизованного или немоторизованного, предпочтительно, самоблокирующегося приводного механизма. Например, приводной механизм может представлять собой гидравлический или пневматический поршневой привод, или роторный двигатель, в частности, электродвигатель, и трансмиссию, которая преобразует вращательное движение приводного вала в перемещение каретки по траектории, определяемой направляющим путем. Можно предложить любой подходящий тип трансмиссии, например, трос и шкив или трансмиссионную цепь, зубчатую рейку и шестерню. Чтобы получить эффект самоблокирования для приводного механизма, предпочтительно, выбор будет сделан для введения механизма необратимой передачи между двигателем и кареткой, например, механизма с ходовым винтом. Также возможно наличие на месте двигателя кривошипа, соединенного с кареткой посредством трансмиссионного механизма, предпочтительно, необратимого механизма.
[0012] Приводной механизм каретки содержит приводной и/или рабочий элемент, расположенный на одной стороне платформы. Таким образом, оператор может оставаться снаружи платформы во время операции установки крепежного элемента.
[0013] Согласно одному особенно предпочтительному варианту воплощения изобретения фиксирующий механизм выполнен таким образом, что, когда платформа находится в горизонтальном положении погрузки и механизм крепления находится в фиксированном состоянии, направляющий путь имеет, по меньшей мере, одну степень свободы при поступательном движении относительно платформы в горизонтальном продольном направлении, предпочтительно, при перемещении, по меньшей мере, 50 см, и, предпочтительно, по меньшей мере, одну степень свободы, чтобы вращаться вокруг вертикальной оси, предпочтительно, при угловом перемещении 10°. Ориентация направляющего пути дает большую степень свободы при размещении крепежного элемента рельсового устройства, а следовательно, позволяет системе крепления приспосабливаться к рельсовому устройству, которое имеет различные конфигурации или которое было установлено не точно.
[0014] Следует упомянуть, что фиксирующие элементы перемещаются из нефиксированного состояния в фиксированное состояние с помощью моторизованного привода и/или аккумулятора энергии, предпочтительно, самоблокирующихся. За счет моторизации фиксирующего элемента и моторизации каретки, получают полностью моторизованную систему крепления.
[0015] Согласно одному особенно предпочтительному варианту воплощения изобретения крепежный элемент выполнен с возможностью перемещения относительно каретки между, по меньшей мере, втянутым положением и положением крепления, причем когда платформа находится в положении погрузки, крепежный элемент во втянутом положении расположен под плоскостью крепления, параллельной эталонной плоскости, и, предпочтительно, расположен над направляющим путем и кареткой, и когда платформа находится в положении погрузки, крепежный элемент в положении крепления расположен над плоскостью крепления. Для сведения, крепежный элемент выполнен с возможностью перемещения с помощью моторизованного привода и/или аккумулятора энергии, предпочтительно, самоблокирующихся, между втянутым положением и положением крепления. Согласно одному варианту воплощения изобретения крепежный элемент выполнен с возможностью вращательного перемещения вокруг оси вращения между втянутым положением и положением крепления. Например, крепежный элемент может вращаться вокруг оси вращения, которая зафиксирована относительно каретки. Возможны и другие системы, например, связь в виде деформируемого параллелограмма.
[0016] Крепежный элемент, предпочтительно, содержит, по меньшей мере, одну зону захвата, предназначенную для зацепления части рельсового устройства, предпочтительно, рельса, хотя также возможно зацепление шпалы рельсового устройства. Согласно одному варианту воплощения изобретения крепежный элемент содержит две зоны захвата, расположенные на разных высотах, когда опорная платформа находится в положении погрузки, и крепежный элемент находится в положении крепления.
[0017] В частности, опорная платформа, предпочтительно, выполнена с возможность перемещения между положением погрузки и наклонным положением транспортировки, предпочтительно, за счет поворота вокруг, по меньшей мере, одной горизонтальной оси поворота. Траектория каретки проходит, по меньшей мере, в направлении, перпендикулярном оси вращения.
[0018] Согласно одному особенно предпочтительному варианту воплощения изобретения механизм крепления содержит
- по меньшей мере, один другой направляющий путь, прикрепленный к направляющему пути,
- по меньшей мере, одну другую каретку направляемую другим направляющим путем по пути, который, когда опорная платформа находится в положении погрузки, параллелен эталонной плоскости,
- средство для блокирования другой каретки относительно другого направляющего пути, и
- по меньшей мере, один другой крепежный элемент железнодорожного устройства, прикрепленный к другой каретке.
[0019] На практике, два направляющих пути могут быть продолжением один другого вдоль одной и той же поперечины механизма крепления, или могут быть параллельны один другому, но смещены, на двух поперечинах механизма крепления, которые скреплены друг с другом.
[0020] Следует упомянуть, что крепежный элемент и другие крепежные элементы имеют зоны захвата для зацепления железнодорожного устройства, причем зоны обращены одна к другой или обращены в одном и том же поперечном направлении и каждая из них выполнена с возможностью зацепления основания рельса железнодорожного устройства.
[0021] Другой аспект изобретения относится к транспортному средству для транспортировки железнодорожного устройства, в частности, грузовому вагону для транспортировки железнодорожного устройства, отличающемуся тем, что оно содержит описанную выше систему крепления, установленную на транспортном шасси, поддерживаемом комплектом тележек.
[0022] Другой аспект изобретения относится к способу, согласно которому
- помещают железнодорожное устройство на опорную платформу, находящуюся в положении погрузки,
- размещают каретку, несущую крепежный элемент, вдоль плоского пути направляющего пути каретки таким образом, чтобы привести крепежный элемент в зацепление с железнодорожным устройством,
- воздействуют на направляющий путь за счет приложения нагрузки, в результате чего он опускается, и фиксируют направляющий путь в положении фиксации.
[0023] Предпочтительно, размещение каретки осуществляют с помощью моторизованного, предпочтительно, самоблокирующегося средства. Аналогично, перемещение направляющего пути, предпочтительно, осуществляют моторизованным средством, предпочтительно, самоблокирующимся.
[0024] После осуществления размещения каретки и перед воздействием на направляющий путь блокируют каретку в положении относительно направляющего пути. Такое блокирование осуществляют автоматически, если механизм, перемещающий каретку, будь он моторизованным или немоторизованным, необратим.
[0025] Чтобы сцепить крепежный элемент с железнодорожным устройством, крепежный элемент, предпочтительно, смещают относительно каретки из втянутого положения в положение крепления перед, во время или после размещения каретки, несущей крепежный элемент.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0026] Дополнительные признаки и преимущества изобретения станут понятны из прочтения следующего описания со ссылкой на прилагаемые чертежи, которые показывают:
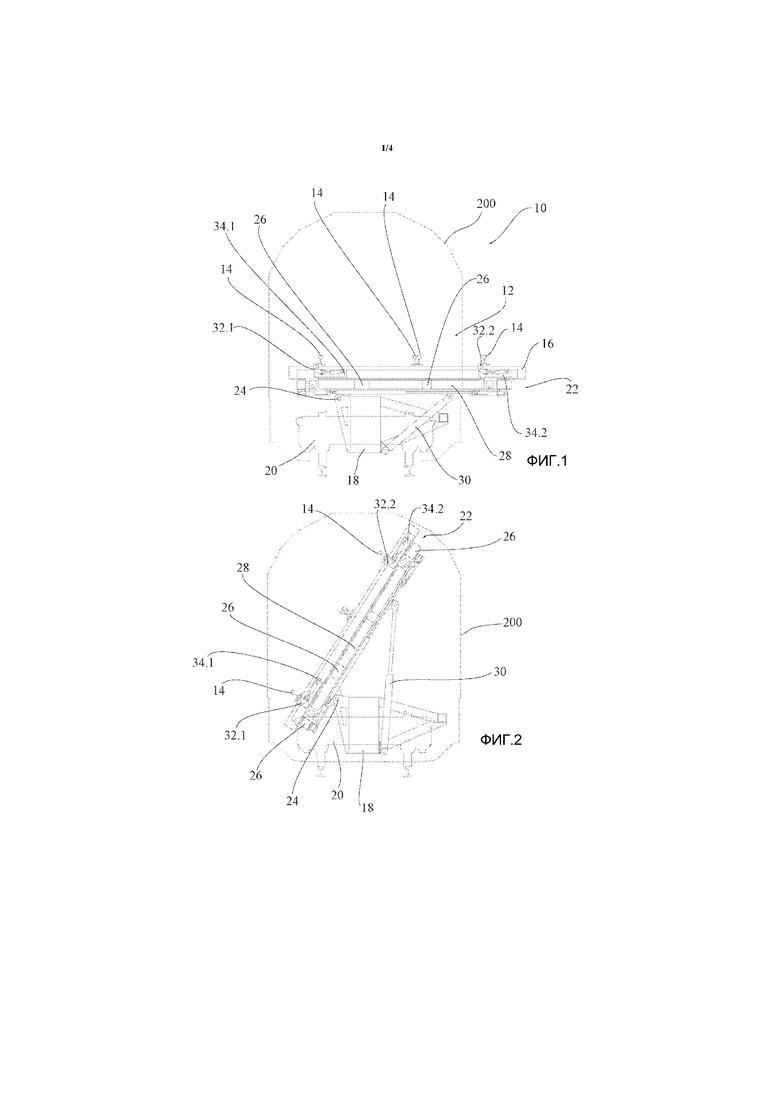
Фиг.1 - схематический вид спереди грузового вагона для транспортировки рельсового устройства, включающего в себя систему крепления рельсового устройства согласно первому варианту воплощения изобретения, в положении погрузки,
Фиг.2 - схематический вид спереди грузового вагона для транспортировки с фиг.1, при этом система крепления рельсового устройства находится в положении транспортировки,
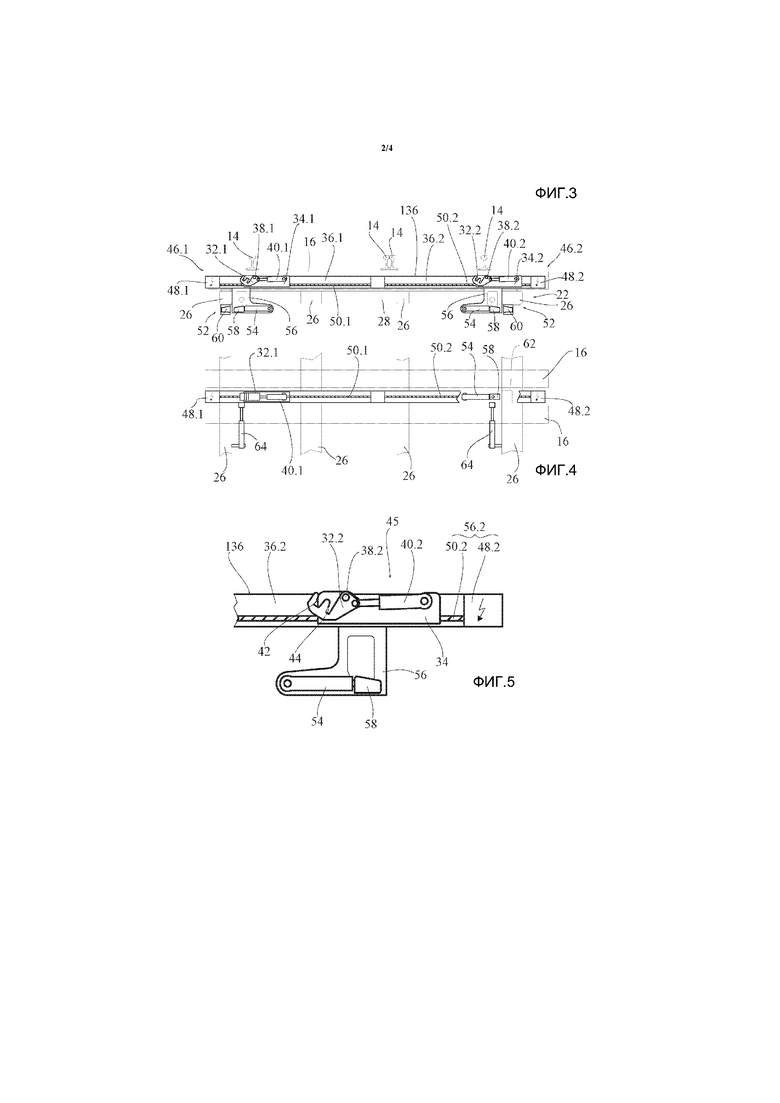
Фиг.3 - схематический вид спереди системы закрепления рельсового устройства грузового вагона для транспортировки с фиг.1 во втянутом положении,
Фиг.4 - схематический вид сверху системы крепления рельсового устройства грузового вагона для транспортировки с фиг.1 во втянутом положении,
Фиг.5 - схематический вид детали системы крепления рельсового устройства грузового вагона для транспортировки с фиг.1 во втянутом положении,
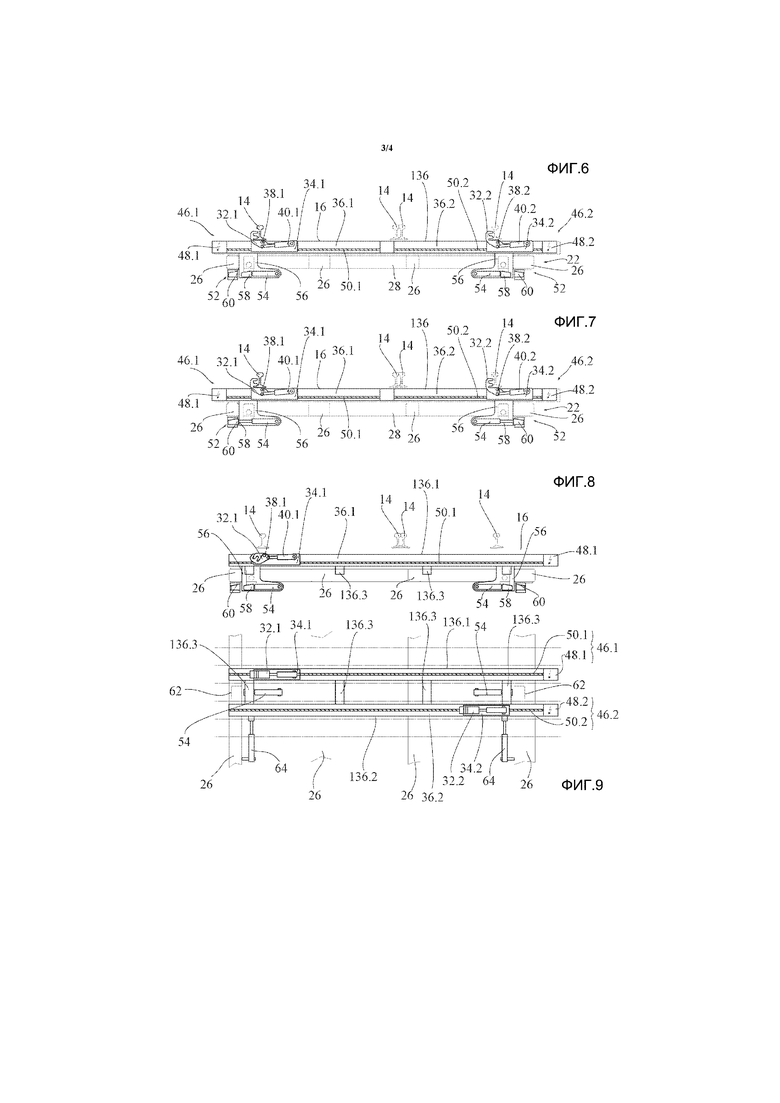
Фиг.6 - схематический вид спереди системы крепления рельсового устройства грузового вагона для транспортировки с фиг.1 в положении, в котором она обращена к рельсовому устройству,
Фиг.7 - схематический вид спереди системы крепления рельсового устройства грузового вагона для транспортировки с фиг.1 в положении фиксации рельсового устройства,
Фиг.8 - схематический вид спереди системы крепления рельсового устройства согласно второму варианту воплощения изобретения в положении размещения рельсового устройства,
Фиг.9 - схематический вид сверху системы крепления рельсового устройства с фиг.8 в положении размещения рельсового устройства,
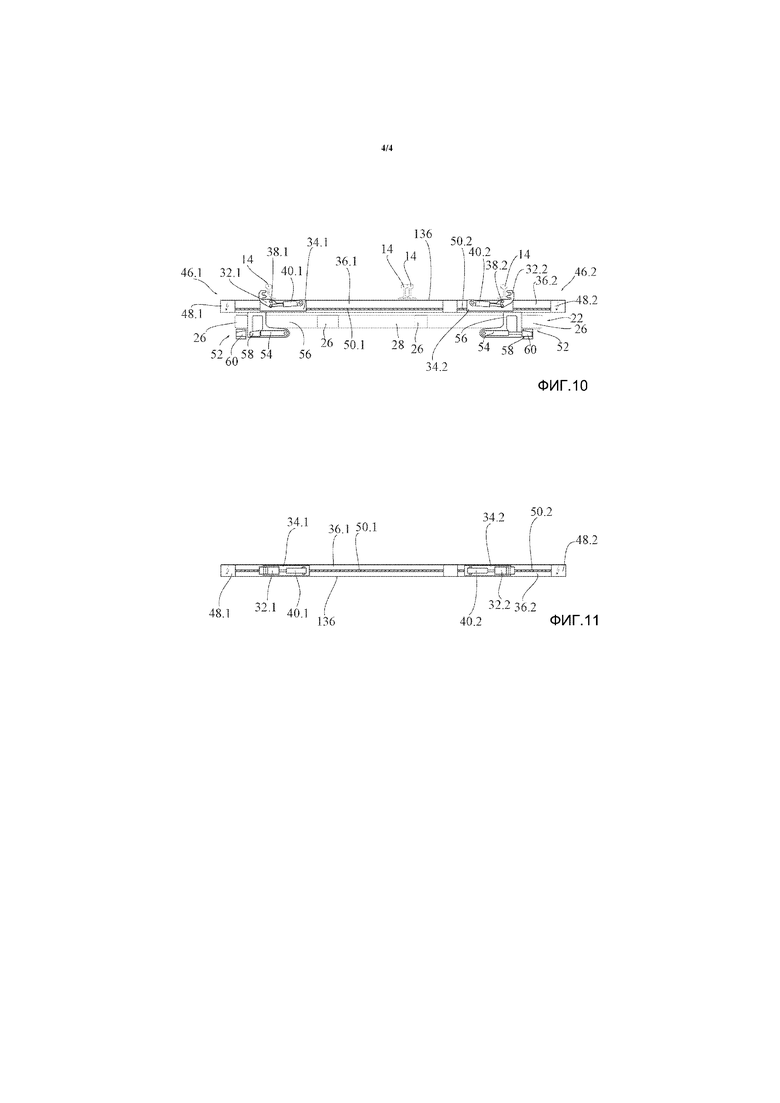
Фиг.10 - схематический вид спереди системы крепления рельсового устройства согласно третьему варианту воплощения изобретения в положении размещения рельсового устройства, и
Фиг.11 - схематический вид сверху системы крепления рельсового устройства с фиг.10 в положении размещения рельсового устройства.
[0027] Для большей ясности одинаковые или подобные элементы обозначены одинаковыми ссылочными позициями на чертежах.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ВОПЛОЩЕНИЯ ИЗОБРЕТЕНИЯ
[0028] На фиг.1 и 2 показан грузовой вагон 10 в процессе погрузки рельсового устройства 12 большого размера, например, стрелочного перевода 12, содержащего рельсы 14 и шпалы 16, в частности, имеющего ширину, которая превышает внешнюю границу 200, установленную для рельсового транспорта.
[0029] Грузовой вагон 10 для транспортировки содержит шасси 18, у которого ширина меньше или равна ширине внешней границы 200, образующее продольную ось, перпендикулярную плоскости фиг.1 и поддерживаемое двумя комплектами тележек 20. К шасси 18 присоединена наклоняющаяся платформа 22 для погрузки и опоры рельсового устройства 12 с помощью соединения 24, обеспечивающего вращение вокруг горизонтальной оси, параллельной продольной оси шасси 18. Если возможно, наклоняющаяся опорная платформа 22 может быть выполнена из двух или более частей. Опорная платформа 22 предпочтительно является цельно сваренной конструкцией и имеет продольные элементы 26 и поперечины 28. В положении погрузки или выгрузки, представленном на фиг.1, наклоняющаяся опорная платформа 22 является горизонтальной. Таким образом, определена эталонная плоскость для платформы, параллельная ей, а также горизонтальная в положении погрузки. Один или более гидравлических толкателей 30 или любой другой тип моторизованного привода позволяет поворачивать наклоняющуюся опорную платформу 22 между положением погрузки и разгрузки и наклонным положением транспортировки, показанным на фиг.2.
[0030] Для закрепления рельсового устройства 12 на опорной платформе 22 имеется механизм крепления, показанный на фиг.3-7. Этот механизм крепления состоит из крепежных элементов 32.1, 32.2, в данном примере - крюков, установленных на каретках 34.1, 34.2, которые направляются по направляющим путям 36.1, 36.2, которые могут быть расположены и закреплены на опорной платформе 22, параллельной эталонной плоскости. Каждый крепежный элемент 32.1, 32.2 прикреплен к соответствующей каретке 34.1, 34.2 с помощью шарнирного соединения 38.1, 38.2. Самоблокирующийся привод 40.1, 40.2, также поддерживаемый кареткой 34.1, 34.2, обеспечивает поворот крепежного элемента 32.1, 32.2 между втянутым положением, показанным на фиг.3 и 4, и положением фиксации, показанным на фиг.6 и 7.
[0031] Под самоблокирующимся приводом 40.1, 40.2 следует понимать привод, который не требует подачи внешней энергии для поддержания его, по меньшей мере, в определенных эталонных положениях, в частности, в положении фиксации на фиг.6 и 7. Это может быть привод, способный удерживать себя в любом выбранном положении в заданном диапазоне положений. В частности, он может быть получен за счет выполнения привода содержащим механизм необратимой передачи, например, использующий ходовой винт, между приводным элементом и крепежным элементом. Также можно предположить объединение гидравлического толкателя (как показано на чертежах) с зажимным устройством стержня толкателя, как это раскрыто для примера в FR2021471 или в WO03/046389.
[0032] Каждый крепежный элемент 32.1, 32.2 образует двойной крюк с двумя зонами 42, 44 захвата (фиг.5), которые в положении фиксации расположены на разных высотах над соответствующими каретками 34.1, 34.2. Это позволяет использовать механизм одинаково как с рельсовым устройством с бетонными (имеющими малую высоту) шпалами, так и с деревянными (имеющими большую высоту) шпалами. В любом случае одна из зон 42, 44 захвата предназначена для зацепления с основанием одного из рельсов 14 рельсового устройства 12 между двумя шпалами 16 рельсового устройства 12. В этом варианте воплощения крепежные элементы 32.1, 32.2 обращены в поперечном направлении на одну и ту же сторону, в данном примере таким образом, что зоны 42, 44 захвата в наклонном положении на фиг.2 открыты в направлении наверх.
[0033] Каретка 34.1, 34.2 направляется по соответствующему направляющему пути 36.1, 36.2 с помощью соответствующего средства, которое ограничивается одним значением из степеней свободы каретки относите6льно направляющего пути. Каретка 34.1, 34.2 и направляющий путь 36.1, 36.2 показаны схематически на чертежах. На практике направляющий путь 36.1, 36.2 может иметь каналы, например, четыре канала, по которым катятся ролики или шарики, связанные с кареткой. Точно также направляющий путь может иметь спуски для башмаков, сформированных на каретке. Таким образом, направляющий путь образует линейный путь, предпочтительно, прямолинейный путь, для каретки. Такой путь параллелен эталонной плоскости. На практике направляющий путь 36.1, 36.2 может состоять из цельного рельса, по периферии которого сформированы каналы или спуски, например, рельса с по существу квадратным или прямоугольным сечением, углы которого обработаны таким образом, чтобы иметь четыре канала или спуска. При таком сценарии каретка может иметь общую U-образную или O-образную форму с тем, чтобы охватить рельс, который образует направляющий путь. Как вариант, направляющий путь может состоять из полого рельса, имеющего канавки, образующие продольную линейную полость, в которой образованы, по меньшей мере, некоторые из каналов или спусков и в которую проходит, по меньшей мере, часть каретки.
[0034] Приводной механизм 46.1, 46.2 связан с каждой кареткой 34.1, 34.2 и заставляет ее перемещаться относительно соответствующего направляющего пути 36.1, 36.2. Например, приводной механизм 46.1, 46.2 может быть механизмом, объединяющим электродвигатель 48.1, 48.2 и ходовой винт 50.1, 50.2, как показано на чертежах.
[0035] Как видно на чертежах, две каретки 34.1, 34.2, каждая из которых несет крепежный элемент 32.1, 32.2, соединены с двумя каретками 36.1, 36.2, сформированными одна в продолжение другой на общей поперечине 136. Поперечина 136, образующая два направляющих пути 36.1, 36.2, прикреплена к опорной платформе с возможностью отсоединения и регулировки с помощью фиксирующего устройства 52 типа клина. Такое устройство содержит на каждом конце поперечины 136 гидравлический привод 54, шарнирно закрепленный на фланце 56, прикрепленном к поперечине 136 и обеспечивающем перемещение фиксирующего элемента 58, состоящего из клина с фаской, чтобы привести его в зацепление с соответствующей наклонной стенкой 60 фиксирующей полости 62, выполненной на компоненте, прикрепленном к продольному элементу 26 опорной платформы 22. Такая наклонная стенка 60 в продольном направлении платформы имеет размер D, превышающий размер клина 58 с фаской, что означает, что имеется определенная степень свободы для размещения каждого конца поперечины 136 в продольном направлении платформы с перемещением, которое может составлять 50 см (25 см с каждой стороны среднего положения), тем самым обеспечивая влияние поперечины на поступательное перемещение или вращение вокруг вертикальной оси на угол 10° (+/-5° с каждой стороны среднего поперечного положения, показанного на чертежах). Между опорной платформой 22 и поперечиной 136 имеются продольные приводы 64 для осуществления требуемых регулировок.
[0036] Механизм крепления, состоящий из направляющих путей 36.1, 36.2, кареток 34.1, 34.2, несущих крепежные элементы 32.1, 32.2, фиксирующих элементов 58, соответствующих полостей 62 и различных приводов 40.1, 40.2, 46.1, 46.2, 54, имеется в нескольких одинаковых копиях, в данном примере в, по меньшей мере, двух, распределенных по длине опорной платформы 22.
[0037] Рельсовое устройство 12 прикреплено к платформе 22 последовательностью операций, показанных на фиг.3, 6 и 7. На фиг.3 рельсовое устройство 12 помещено на платформу 22, причем шпалы 16 рельсового устройства 12 лежат на продольных элементах 26 опорной платформы 22, если требуется с введением амортизационных прокладок. Рельсовое устройство 12 помещено таким образом, что поперечины 136 помещена между двумя шпалами 16. Крепежные элементы 32.1, 32.2 втянуты, чтобы не мешать работе с платформой 22. Затем, оператор осуществляет действия с электродвигателями 48.1, 48.2 и приводами 40.1, 40.2, чтобы отрегулировать расположение кареток 34.1, 34.2 и разместить крепежные элементы 32.1, 32.2 таким образом, чтобы привести их в зацепление с основаниями рельсов 14 рельсового устройства 12. При осуществлении этой операции фиксирующие элементы 58 не находятся в контакте с наклонными стенками 60, что означает, что размещение поперечины 136 также можно регулировать, используя приводы 64, в соответствии с тем как расположено рельсовое устройство 12.
[0038] Поперечину 136 фиксируют после нахождения соответствующего положения и после того, как каретки 34.1, 34.2 размещены, и крепежные элементы 32.1, 32.2 приведены в зацепление с основаниями двух рельсов 14 рельсового устройства. Удлинение приводов 54 заставляет клинья 58 с фаской перемещаться друг от друга, приводя их в контакт с соответствующими наклонными стенками 60. На стыке клиньев 58 с фаской и наклонных стенок 60 по существу горизонтальное фиксирующее усилие, созданное приводами 54, создает нагрузки, которые имеют направленную вниз вертикальную составляющую, в результате чего поперечина 136 смещается вниз. Такие нагрузки передаются с помощью направляющих путей 36.1, 36.2 на каретки 34.1, 34.2 и крюки 32.1, 32.2, образующие крепежные элементы, создавая эффект увеличения давления контакта между используемыми зонами 42, 44 захвата и основанием рельсов 14. Это приводит к захвату рельсового устройства между крепежными элементами 32.1, 32.2 и платформой 22. Давление контакта между клиньями 58 с фаской и наклонными стенками 60 производит большие нагрузки статического трения, которые фиксируют поперечину 136 на платформе 22 во всех направлениях. Приводы 54 фиксирующих элементов 58 являются самоблокирующимися, что означает, что не требуется подача энергии для удержания их фиксированными.
[0039] Такая же процедура осуществляется для каждого из фиксирующих механизмов параллельно или последовательно.
[0040] Таким образом, как только рельсовое устройство прикреплено к опорной платформу 22, последнюю можно поднимать в положение для транспортировки, показанное на фиг.2.
[0041] Операции разгрузки осуществляются в обратном по сравнению с операциями погрузки порядке.
[0042] Если требуется, только один из двух крепежных элементов 32.1, 32.2, связанных с поперечиной 136, может быть помещен в зацепление с одним из рельсов 14 рельсового устройства 12, а другой крепежный элемент 32.1, 32.2 остается во втянутом положении.
[0043] Согласно альтернативной форме варианта воплощения изобретения, показанной на фиг.9, две каретки 34.1, 34.2, каждая из которых несет крепежный элемент 32.1, 32.2, связаны с двумя параллельными направляющими путями 36.1, 36.2, сформированными на двух параллельных поперечинах 136.1, 136.2, закрепленных на одной другой поперечине 136.3 таким образом, чтобы образовать жесткий подузел. Такая конструкция обеспечивает широкий диапазон для размещения каждой из кареток 34.1, 34.2 по траектории соответствующего направляющего пути. Приводной механизм 46.1, 46.2 связан с каждой из кареток 34.1, 34.2 и перемещает ее относительно соответствующего направляющего пути 36.1, 36.2. Например, приводной механизм 46.1, 46.2 может быть механизмом, который объединяет электродвигатель 48.1, 48.2 с ходовым винтом 50.1, 50.2, как показано на чертежах.
[0044] Согласно другой альтернативной форме варианта воплощения изобретения, показанной на фиг.10 и 11, две каретки 34.1, 34.2, каждая из которых несет крепежный элемент 32.1, 32.2, соединены с двумя совмещенными направляющими путями 36.1, 36.2, сформированными на одной и той же поперечине 136. В этом варианте воплощения направляющие пути 36.1, 36.2 имеют существенно разные длины, а перемещение каретки 34.1 значительно превышает перемещение каретки 34.2. Такая конструкция в частности хорошо подходит для рельсового устройства 12, в котором рельс 14, предназначенный для зацепления с крепежным элементом 32.2, находится в положении, которое изменяется очень незначительно, при этом положение рельса 14, предназначенного для зацепления с крепежным элементом 32.1, подлежит большему изменению.
[0045] Кром того, крепежные элементы 32.1, 32.2 в поперечном направлении обращены друг к другу, что позволяет говорить о том, что зоны 42, 44 захвата обращены друг к другу. Следует понимать, что когда два крепежных элемента 32.1, 32.2 находятся в зацеплении, рельсовое устройство зафиксировано в поперечном направлении.
[0046] На практике, один и тот же транспортный грузовой вагон может быть оборудован механизмом крепления согласно одному или более вариантов воплощения изобретения, показанных на чертежах, распределенных по длине платформы, с тем, чтобы локально приспособиться к конфигурации рельсового устройства 12.
[0047] Естественно, примеры, показанные на чертежах и обсуждаемые выше, даны лишь в качестве неограничивающей иллюстрации. Возможны различные альтернативные формы.
[0048] Положение погрузки и разгрузки платформы не обязательно является горизонтальным, а может быть наклонным, хотя, естественно, наклоненным меньше, чем в положении транспортировки.
[0049] Перемещение крепежного элемента относительно каретки может быть не только вращательным, но и поступательным перемещением или совокупностью поступательного и вращательного перемещений, предпочтительно, только с одной степенью свободы. Предпочтительно, оно является перемещением в плоскости, параллельной вертикальной плоскости. В частности, оно может быть перемещением, полученным от деформации шарнирного четырехугольника, конкретно, шарнирного параллелограмма.
[0050] Крепежный элемент мажет быть выполнен таким образом, что он захватывает не основание рельса 14, а шпалу 16 рельсового устройства 12. В этом случае легко представить, что крепежный элемент 32.1, 32.2 вращается вокруг поперечной горизонтальной оси вращения.
[0051] Направление каретки по траектории, определяемой направляющим путем, может быть получено при использовании любого соответствующего средства.
[0052] Легко предположить, что различные показанные варианты воплощения могут быть объединены для получения других вариантов.
[0053] Следует отметить, что все признаки, выведенные специалистом в данной области из настоящего описания, чертежей и приложенной формулы изобретения, даже если они описаны конкретными терминами лишь в связи с определением других признаков, как отдельно, так и в комбинации, могут быть объединены с другими признаками или группой признаков, раскрытых в настоящем описании, если при осуществлении этого они не нарушаются явно, и техническая сущность не представлена таким образом, что такие комбинации невозможны или не имеют смысла.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГЕРМЕТИЧНАЯ БУТЫЛКА ДЛЯ КОРМЛЕНИЯ МЛАДЕНЦЕВ | 2006 |
|
RU2397749C2 |
| Устройство для изменения направления движения поездов в автоблокировке | 1985 |
|
SU1353684A1 |
| ПРИВОД С ОБЛЕГЧЕННОЙ УСТАНОВКОЙ | 2017 |
|
RU2704077C1 |
| СПОСОБ КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ГРУЗОВ | 2004 |
|
RU2269821C1 |
| СИСТЕМЫ ПЕЧАТНЫХ МАШИН ДЛЯ ДВУСТОРОННЕЙ ГЛУБОКОЙ ПЕЧАТИ ЛИСТОВ ДЛЯ ИЗГОТОВЛЕНИЯ БАНКНОТ И ПОДОБНЫХ ЦЕННЫХ БУМАГ | 2008 |
|
RU2472624C2 |
| УСТРОЙСТВО ДЛЯ ХРАНЕНИЯ | 2013 |
|
RU2627045C2 |
| БОРДЮРНАЯ ДОСКА ДЛЯ ЛЕСОВ И СПОСОБ ИЗГОТОВЛЕНИЯ БОРДЮРНОЙ ДОСКИ | 2008 |
|
RU2412317C1 |
| Электроэрозионный станок | 1981 |
|
SU963786A1 |
| СПОСОБ МОНИТОРИНГА ЛЕСНЫХ ПОЖАРОВ И КОМПЛЕКСНАЯ СИСТЕМА РАННЕГО ОБНАРУЖЕНИЯ ЛЕСНЫХ ПОЖАРОВ | 2019 |
|
RU2703362C1 |
| УЗЕЛ НЕПОДВИЖНЫХ ЛОПАТОК ДЛЯ ОБЛЕГЧЕННОГО ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ, СОДЕРЖАЩИЙ, ПО МЕНЬШЕЙ МЕРЕ, ОДИН ТАКОЙ УЗЕЛ НЕПОДВИЖНЫХ ЛОПАТОК | 2009 |
|
RU2515694C2 |
Группа изобретений относится к области железнодорожного транспорта, а именно к системе крепления путевых звеньев, железнодорожной платформе, содержащей такую систему, и способу погрузки путевого звена на платформу. Система крепления содержит грузовую платформу и механизм крепления путевого звена. Грузовая платформа может принимать транспортное положение и положение под погрузку. Механизм крепления содержит направляющие и каретки, выполненные с возможностью перемещения по направляющим. Каретки содержат крепежные элементы и фиксаторы. Во время погрузки путевого звена платформу переводят в положение под погрузку. Помещают путевое звено на платформу. Каретки с крепежными элементами размещают в межшпальном пространстве и зацепляют за подошву рельса. Закрепляют путевое звено на платформе за счет опускания и фиксации направляющих. Повышается надежность фиксации путевого звена на транспортировочной платформе. 3 н. и 12 з.п. ф-лы, 11 ил.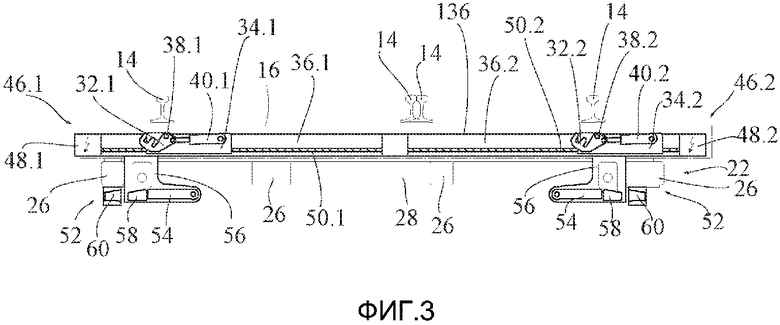
1. Система крепления железнодорожного устройства (12), содержащая
- опорную платформу (22), выполненную с возможностью размещения в положении погрузки, и
- по меньшей мере один механизм крепления железнодорожного устройства (12) к опорной платформе (22), выполненный с возможностью перехода из нефиксированного состояния в фиксированное состояние,
отличающаяся тем, что механизм крепления содержит
- по меньшей мере один направляющий путь (36.1, 36.2),
- по меньшей мере одну каретку (34.1, 34.2), направляемую направляющим путем (36.1, 36.2) по траектории, которая, когда опорная платформа (22) находится в положении погрузки, расположена в эталонной плоскости, причем каретка (34.1, 34.2) перемещается по направляющему пути (36.1, 36.2) с помощью моторизованного или немоторизованного предпочтительно самоблокирующегося приводного механизма (46.1, 46.2),
- средство для блокирования каретки (34.1, 34.2) относительно направляющего пути (36.1, 36.2),
- по меньшей мере один крепежный элемент (32.1, 32.2) железнодорожного устройства (12), прикрепленный к каретке (34.1, 34.2), и
- элементы (58) для фиксации направляющего пути (36.1, 36.2) относительно платформы, причем элементы переходят из нефиксированного положения в фиксированное положение, когда механизм крепления переходит из нефиксированного состояния в фиксированное состояние при опорной платформе (22) в положении погрузки, смещая направляющий путь (36.1, 36.2) вниз относительно опорной платформы (22).
2. Система крепления по п.1, отличающаяся тем, что приводной механизм (46.1, 46.2) каретки (34.1, 34.2) содержит приводной и/или рабочий элемент (48.1, 48.2), расположенный на одной стороне платформы.
3. Система крепления по П.1, отличающаяся тем, что фиксирующие элементы (58) выполнены с возможностью перемещения из нефиксированного состояния в фиксированное состояние с помощью моторизованного привода (54) и/или аккумулятора энергии, предпочтительно самоблокирующихся.
4. Система крепления по любому из пп.1-3, отличающаяся тем, что крепежный элемент (32.1,32.2) выполнен с возможностью перемещения относительно каретки (34.1,34.2) между по меньшей мере втянутым положением и положением крепления, причем, когда платформа (22) находится в положении погрузки, крепежный элемент (32.1,32.2) во втянутом положении расположен под плоскостью крепления, параллельной эталонной плоскости, и предпочтительно расположен над направляющим путем (36.1, 36.2) и кареткой (34.1, 34.2) и, когда платформа (22) находится в положении погрузки, крепежный элемент (32.1,32.2) в положении крепления расположен над плоскостью крепления.
5. Система крепления по п.4, отличающаяся тем, что крепежный элемент (32.1,32.2) выполнен с возможностью перемещения с помощью моторизованного привода (40.1, 40.2) и/или аккумулятора энергии, предпочтительно самоблокирующегося, между втянутым положением и положением крепления.
6. Система крепления по п.4, отличающаяся тем, что крепежный элемент (32.1,32.2) выполнен с возможностью вращательного перемещения вокруг оси (38.1, 38.2) вращения между втянутым положением и положением крепления.
7. Система крепления по любому из пп.1-3, 5 или 6, отличающаяся тем, что крепежный элемент (32.1,32.2) содержит две зоны (42, 44) захвата, расположенные на разных высотах, когда опорная платформа (22) находится в положении погрузки и крепежный элемент (32.1,32.2) находится в положении крепления.
8. Система крепления по любому из пп.1-3, 5 или 6, отличающаяся тем, что опорная платформа (22) выполнена с возможностью перемещения между положением погрузки и наклонным положением транспортировки предпочтительно за счет поворота вокруг по меньшей мере одной горизонтальной оси (24) поворота.
9. Система крепления по п.8, отличающаяся тем, что траектория каретки (34.1, 34.2) проходит по меньшей мере в направлении, перпендикулярном оси вращения.
10. Система крепления по любому из пп.1-3, 5, 6 или 9, отличающаяся тем, что механизм крепления содержит
- по меньшей мере один другой направляющий путь (36.1, 36.2), прикрепленный к направляющему пути (36.1, 36.2),
- по меньшей мере одну другую каретку (34.1, 34.2), направляемую другим направляющим путем (36.1, 36.2) по пути, который, когда опорная платформа (22) находится в положении погрузки, параллелен эталонной плоскости,
- средство для блокирования другой каретки (34.1, 34.2) относительно другого направляющего пути (36.1, 36.2) и
- по меньшей мере один другой крепежный элемент (32.1, 32.2) железнодорожного устройства (12), прикрепленный к другой каретке (34.1, 34.2).
11. Система крепления по п.10, отличающаяся тем, что крепежный элемент (32.1, 32.2) и другие крепежные элементы (32.1, 32.2) имеют зоны (42, 44) захвата для зацепления железнодорожного устройства (12), причем зоны обращены одна к другой или обращены в одном и том же поперечном направлении и каждая из них выполнена с возможностью зацепления основания рельса (14) железнодорожного устройства (12).
12. Транспортное средство (10) для транспортировки железнодорожного устройства (12), в частности грузовой вагон для транспортировки железнодорожного устройства (12), отличающееся тем, что оно содержит систему крепления по любому предшествующему пункту, установленную на транспортном шасси (18), поддерживаемом комплектом тележек (20).
13. Способ транспортировки железнодорожного устройства (12), отличающийся тем, что
- помещают железнодорожное устройство (12) на опорную платформу, находящуюся в положении погрузки,
- размещают каретку (34.1, 34.2), несущую крепежный элемент (32.1, 32.2), вдоль плоского пути направляющего пути (36.1, 36.2) каретки (34.1, 34.2) таким образом, чтобы привести крепежный элемент (32.1, 32.2) в зацепление с железнодорожным устройством (12),
- воздействуют на направляющий путь (36.1, 36.2) за счет приложения нагрузки, в результате чего он опускается, и фиксируют направляющий путь (36.1, 36.2) в положении фиксации.
14. Способ транспортировки железнодорожного устройства (12) по п.13, отличающийся тем, что после размещения каретки (34.1, 34.2) и перед воздействием на направляющий путь (36.1, 36.2) блокируют каретку (34.1,34.2) в положении относительно направляющего пути (36.1, 36.2).
15. Способ транспортировки железнодорожного устройства (12) по п.13 или 14, отличающийся тем, что для зацепления крепежного элемента (32.1, 32.2) с железнодорожным устройством (12) перед, во время или после размещения каретки (34.1, 34.2), несущей крепежный элемент (32.1, 32.2), крепежный элемент (32.1, 32.2) перемещают относительно каретки (34.1, 34.2) из втянутого положения в положение крепления.
| US 5431108 A1, 11.07.1995 | |||
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Машина для печатания брайлевским шрифтом | 1930 |
|
SU21181A1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ ПУТЕВЫХ ЗВЕНЬЕВ | 1995 |
|
RU2088720C1 |
| СОСТАВ ДЛЯ ТРАНСПОРТИРОВАНИЯ ЗВЕНЬЕВ СТРЕЛОЧНОГО ПЕРЕВОДА | 1996 |
|
RU2098537C1 |

