Уровень техники
Системы цифровых преобразователей, которые включают в себя емкостные датчики, используются в качестве устройств ввода для множества устройств с человеко-машинным интерфейсом (HID) и для множества различных прикладных задач. Сенсорный экран является одним типом системы цифрового преобразователя, которая объединена с плоскопанельным дисплеем (FPD). Сенсорные экраны используются для управления переносными устройствами, такими как портативные компьютеры, планшетные компьютеры, MP3-проигрыватели, смартфоны и другие устройства.
Системы цифровых преобразователей отслеживают ввод свободным стилем, обеспечиваемый пальцем и/или стилусом. Взаимно-емкостный датчик является одним типом емкостного датчика для системы цифрового преобразователя. Взаимно-емкостные датчики в типичном варианте включают в себя матрицу, сформированную с помощью параллельного электропроводящего материала, размещенного в строках и столбцах с емкостным соединением, формируемым около областей перекрывания и/или пересечения, формируемых между строками и столбцами. Поднесение пальца или токопроводящего объекта поблизости от поверхности датчика изменяет локальное электростатическое поле и уменьшает взаимную емкость между областями пересечения поблизости от пальца или токопроводящего стилуса. Изменение емкости в точках пересечения на сетке может быть обнаружено, чтобы определять местоположение пальца или токопроводящего объекта на емкостном датчике. Изменение емкости определяется посредством приложения сигнала по одной оси матрицы и измерения сигнала на другой оси. Взаимная емкость предоставляет возможность мультисенсорного управления, когда в одно и то же время могут отслеживаться множество пальцев, ладоней или стилусов.
Сущность изобретения
Согласно аспекту некоторых вариантов осуществления настоящего изобретения предоставляется емкостный датчик цифрового преобразователя, который обнаруживает как позицию, так и приложенное давление взаимодействующего объекта. Согласно аспекту некоторых вариантов осуществления настоящего изобретения емкостный датчик цифрового преобразователя адаптируется для использования в дождь и/или под водой. Согласно аспекту некоторых вариантов осуществления настоящего изобретения предоставляется система цифрового преобразователя, которая эксплуатируется, чтобы использовать профили распознанного давления, чтобы определять позицию взаимодействующего объекта. Необязательно, профили давления используются для распознавания взаимодействующих объектов, которые не являются токопроводящими, и/или для распознавания взаимодействующих объектов, в то время как поверхность распознавания датчика цифрового преобразователя является мокрой.
Пока не определено иное, все технические и/или научные термины, используемые в данном документе, имеют то же значение, которое обычно понимается обычным специалистом в области техники. Хотя способы и материалы, аналогичные или эквивалентные описанным в данном документе, могут быть использованы на практике или при тестировании вариантов осуществления, примерные способы и материалы описываются ниже. В случае конфликта настоящее описание, включающее в себя определения, будет иметь преимущество. Кроме того, материалы, способы и примеры являются лишь иллюстративными, и не предназначены для того, чтобы являться обязательно ограничивающими.
Краткое описание нескольких видов чертежа(-ей)
Некоторые варианты осуществления изобретения описываются в данном документе, только в качестве примера, со ссылкой на сопровождающие чертежи. Далее с конкретной ссылкой на чертежи в деталях, подчеркивается, что показанные особенности существуют в качестве примера и в целях иллюстративного обсуждения вариантов осуществления изобретения. В этом отношении, описание, взятое с чертежами, делает очевидным специалистам в области техники то, как варианты осуществления изобретения могут быть применены на практике.
На чертежах:
Фиг. 1 - это упрощенная примерная блок-схема примерной системы цифрового преобразователя сенсорного устройства в соответствии с некоторыми вариантами осуществления настоящего изобретения;
Фиг. 2 - это упрощенный примерный схематичный чертеж, показывающий взаимодействие с емкостным датчиком с упругой поверхностью взаимодействия в соответствии с некоторыми вариантами осуществления настоящего изобретения;
Фиг. 3 - это упрощенный схематичный чертеж, показывающий взаимодействие с примерным гибким емкостным датчиком, включающим в себя упругий слой, покрывающий поверхность датчика, которая покрывает дисплей в соответствии с некоторыми вариантами осуществления настоящего изобретения;
Фиг. 4 - это упрощенный схематичный чертеж, показывающий взаимодействие с примерным емкостным датчиком, включающим в себя разделители вдоль краев датчика, которые обеспечивают воздушный зазор между датчиком и дисплеем в соответствии с некоторыми вариантами осуществления настоящего изобретения;
Фиг. 5 - это упрощенный схематичный чертеж, показывающий взаимодействие с примерным емкостным датчиком, включающим в себя разделители вдоль краев датчика, которые обеспечивают воздушный зазор между защитным покрытием и датчиком в соответствии с некоторыми вариантами осуществления настоящего изобретения;
Фиг. 6A и 6B являются упрощенными схематичными чертежами, показывающими взаимодействие с примерным емкостным датчиком, сформированным с двумя чувствительными слоями, разделенными точечными разделительными элементами в соответствии с некоторыми вариантами осуществления настоящего изобретения;
Фиг. 7 - это упрощенный схематичный чертеж, показывающий взаимодействие с примерным емкостным датчиком, включающим в себя упругую поверхность взаимодействия, которая является токопроводящей в соответствии с некоторыми вариантами осуществления настоящего изобретения;
Фиг. 8A и 8B являются упрощенными схематичными графиками примерного чувствительного к давлению выходного сигнала, обнаруживаемого с помощью двух примерных чувствительных к давлению датчиков в соответствии с некоторыми вариантами осуществления настоящего изобретения; и
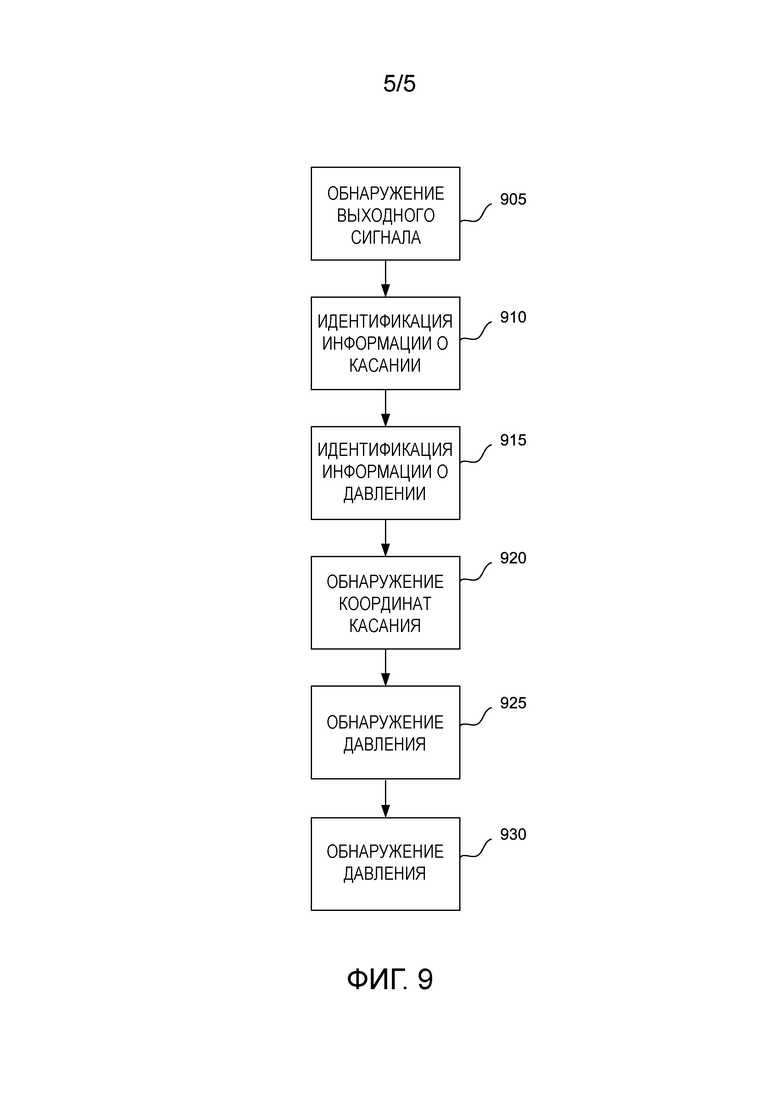
Фиг. 9 - это упрощенная блок-схема последовательности операций примерного способа для обнаружения координат взаимодействия и давления, прикладываемого во время взаимодействия, в соответствии с некоторыми вариантами осуществления настоящего изобретения.
Подробное описание изобретения
Система преобразования в цифровую форму может включать в себя прозрачный датчик цифрового преобразователя, наложенный на дисплей, например, плоскопанельный дисплей (FPD) и/или жидкокристаллический дисплей (LCD). Прозрачный датчик для преобразования в цифровую форму включает в себя матрицу вертикальных и горизонтальных токопроводящих линий для распознавания местоположения одного или более стилусов и/или пальцев. Ввод в датчик цифрового преобразователя включает в себя одно или более из электромагнитной (EM) передачи от стилуса, касающегося сенсорной поверхности, и емкостного соединения вследствие касания токопроводящим объектом, таким как палец, экрана. Местоположение пальца обнаруживается посредством срабатывания одной токопроводящей линии единовременно вдоль одной оси сетки и обнаружения выходного сигнала в ответ на каждый сигнал, прикладываемый от множества токопроводящих линий по другой оси. Система преобразования в цифровую форму приспособлена обнаруживать позицию одновременных событий касаний множества стилусов и/или множества пальцев.
Чувствительный к давлению емкостный датчик может включать в себя поверхность взаимодействия, с которой пользователь взаимодействует, чувствительный слой и упругий слой, который может быть локально сжат в ответ на локальное давление, прикладываемое на поверхности взаимодействия во время пользовательского взаимодействия с емкостным датчиком. Чувствительный слой и упругий слой протягиваются от края до края поверхности взаимодействия. Упругий слой может быть расположен между двумя чувствительными слоями емкостного датчика или между чувствительным слоем емкостного датчика и плоскопанельным дисплеем, поверх которого располагается емкостный датчик. Емкостный датчик используется как для идентификации точки взаимодействия, так и для определения давления, прикладываемого в точке взаимодействия.
Согласно некоторым вариантам осуществления настоящего изобретения емкостный датчик включает в себя и/или объединяется с упругим слоем, расположенным поверх датчика, и эксплуатируется как поверхность взаимодействия. Согласно некоторым вариантам осуществления настоящего изобретения, емкостный датчик включает в себя упругий слой и/или воздушный зазор между двумя чувствительными слоями датчика, например, чувствительным слоем строк и чувствительными слоями столбцов, между чувствительным слоем и дисплеем, например, LCD или слоем заземления, между токопроводящим слоем и чувствительным слоем или между стеклянным покрытием и чувствительным слоем. Согласно некоторым вариантам осуществления настоящего изобретения, упругий слой обеспечивает увеличение сближения между взаимодействующим объектом и чувствительным слоем, увеличение сближения между чувствительным слоем и заземленным слоем и/или увеличение сближения между двумя чувствительными слоями в местоположении касания вследствие приложенного давления.
В некоторых примерных вариантах осуществления упругий слой формируется из сжимаемого материала, например, силикона, клея, органического геля и/или из точечных разделительных элементов. Необязательно, используется материал с твердостью 20-40 единиц на дюрометре по Шору. Необязательно, датчик структурируется на стекле или пленочной подложке из полиэтилентерефталата (PET). Необязательно, когда точечные разделительные элементы используются между чувствительными слоями, давление, прикладываемое взаимодействующим объектом, может вести к локальному короткому соединению между чувствительными слоями, которое может быть обнаружено. Необязательно, упругий слой имеет толщину 50-500 мкм.
Согласно некоторым вариантам осуществления настоящего изобретения, упругий слой сжимается локально в ответ на давление, прикладываемое взаимодействующим объектом. В некоторых примерных вариантах осуществления локальное сжатие упругого слоя улучшает измеренный емкостный эффект взаимодействующего объекта. В некоторых примерных вариантах осуществления объединение упругого слоя делает датчик чувствительным к давлению, и обнаруживается позиция, а также приложенное давление, взаимодействующего объекта. Необязательно, профиль давления, обнаруженный с помощью датчика, используется для отслеживания позиции взаимодействующего объекта.
Согласно некоторым вариантам осуществления настоящего изобретения, емкостный датчик конфигурируется для распознавания взаимодействия объекта, например, токопроводящего или непроводящего объекта, в то время как чувствительная поверхность емкостного датчика является мокрой и/или находится под водой.
В типичном варианте, присутствие воды на чувствительной поверхности емкостного датчика нарушает распознавание и/или отслеживание пальца и/или токопроводящего объекта. В типичном варианте, емкостные датчики неработоспособны в условиях под водой. В типичном варианте, касание с массой воды, которая заземлена, заземляет весь датчик и, тем самым, снижает чувствительность датчика к касанию кончика пальца. Капли воды на чувствительной поверхности могут в типичном варианте распознаваться емкостным датчиком и могут быть ошибочно идентифицированы как намеренное взаимодействие с датчиком. В некоторых примерных вариантах осуществления датчик также конфигурируется для распознавания взаимодействия непроводящего объекта, например, кончика пальца, покрытого перчаткой, пластикового указателя и пассивного пера, которое может не передавать электростатический сигнал или иначе влиять на электромагнитное поле цифрового преобразователя.
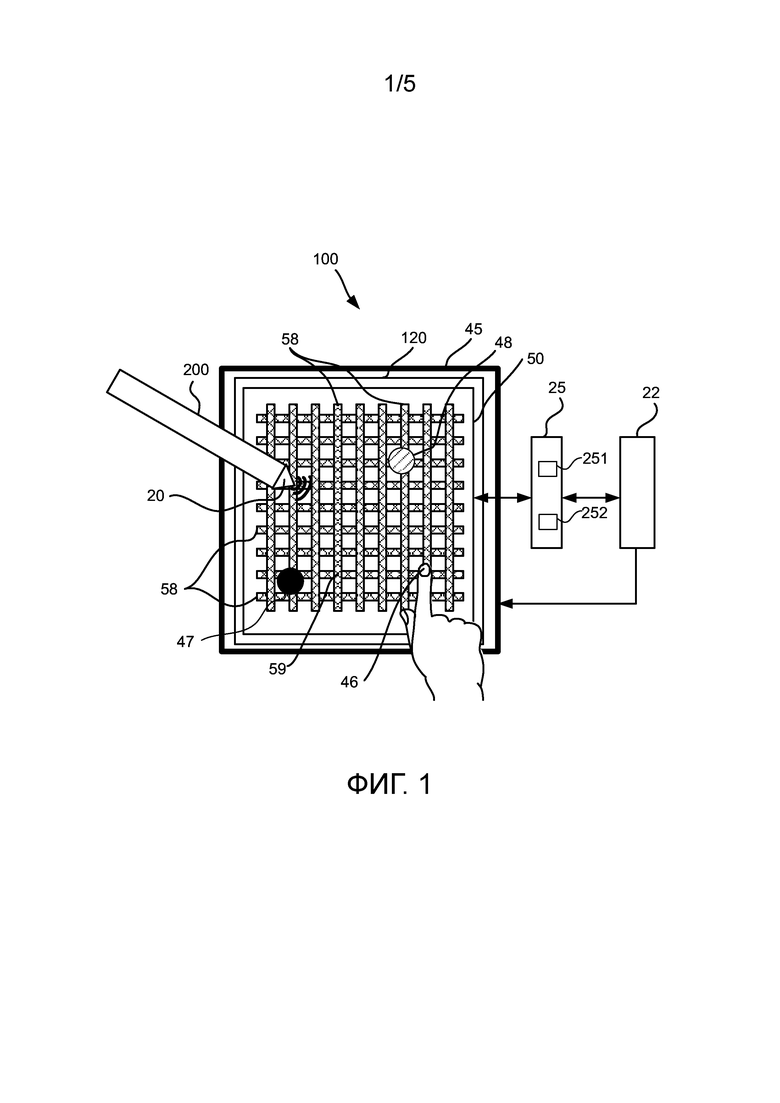
Далее выполняется ссылка на фиг. 1, показывающий упрощенную примерную блок-схему примерной системы цифрового преобразователя сенсорного устройства в соответствии с некоторыми вариантами осуществления настоящего изобретения. Согласно некоторым вариантам осуществления настоящего изобретения вычислительное устройство 100 включает в себя дисплей 45, который объединен с датчиком 50 цифрового преобразователя. В некоторых примерных вариантах осуществления датчик 50 цифрового преобразователя является сетчатым емкостным датчиком, сформированным с токопроводящими дорожками 58 рядов и столбцов. В типичном варианте, токопроводящие дорожки 58 электрически изолированы друг от друга, и каждая из токопроводящих дорожек соединяется, по меньшей мере, на одном конце со схемой 25 цифрового преобразователя. В типичном варианте, токопроводящие дорожки 58 размещаются, чтобы улучшать емкостную связь между токопроводящими линиями строк и столбцов, например, около пересечения 59, сформированных между строками и столбцами в ответ на присутствие токопроводящего объекта.
Согласно некоторым вариантам осуществления настоящего изобретения токопроводящие дорожки 58 функционируют, чтобы обнаруживать ввод посредством стилуса 200, передающего электромагнитный сигнал, и/или касания одного или более кончиков пальцев 46 или других токопроводящих объектов. Необязательно, токопроводящие дорожки функционируют, чтобы обнаруживать давление, прикладываемое токопроводящим или непроводящим объектом.
Необязательно, способ обнаружения взаимной емкости и/или способ обнаружения собственной емкости применяются с датчиком 50 для распознавания взаимодействия с кончиком пальца 46. В типичном варианте, во время обнаружения взаимной емкости и собственной емкости, схема 25 цифрового преобразователя отправляет инициирующий импульс и/или сигнал запроса одной или более токопроводящим дорожкам 58 датчика 50 цифрового преобразователя и проводит дискретизацию выходного сигнала от других токопроводящих дорожек 58 в ответ на инициирование и/или запрос.
В типичном варианте, дискретизированный выходной сигнал является сигналом запроса, который прошел по пересечениям 59 между токопроводящими дорожками 58 строк и столбцов вследствие взаимной емкости, сформировавшейся около пересечений 59. Базисная амплитуда может быть обнаружена в отсутствие каких-либо объектов, взаимодействующих с датчиком 50. Присутствие кончика пальца 46 уменьшает амплитуду соответствующего сигнала приблизительно на 5-30%. Присутствие кончика пальца 46 создает профиль местоположения в форме пика, например, отрицательный пик и/или впадину с основанием, которое, в целом, охватывает и может протягиваться по поверхности касания кончика пальца 46 на датчике 50. Когда кончик пальца 46 нависает над датчиком 50, полученный профиль местоположения в типичном варианте ниже по сравнению с профилем местоположения, полученным во время касания. В типичном варианте, присутствие маркера 47, например, металлического объекта, который является плавающим и/или имеет высокий импеданс по отношению к земле, увеличивает амплитуду соответствующего сигнала на 5-10%. Необязательно, объекты, сформированные с помощью диэлектрического материала, также обнаруживаются с помощью датчика 50. В типичном варианте, присутствие объектов, сформированных с помощью диэлектрического материала, увеличивает амплитуду связанного сигнала на 1-5%.
В некоторых вариантах осуществления некоторые или все токопроводящие дорожки 58 вдоль одной оси датчика 50 опрашиваются одновременно или последовательным образом, и в ответ на каждый запрос выполняется дискретизация выходных сигналов от токопроводящих дорожек 58 по другой оси. Эта процедура сканирования обеспечивает получение выходного сигнала, ассоциированного с каждым пересечением 59 сетчатого датчика 50. В типичном варианте, эта процедура обеспечивает обнаружение координат одного или более токопроводящих объектов, например, кончика пальца 46, касающегося и/или нависающего над датчиком 50, в одно и то же время (множественное касание).
В некоторых примерных вариантах осуществления датчик 50 объединяется с упругим слоем 120, чтобы обеспечивать способность распознавания давления. В некоторых примерных вариантах осуществления способность распознавания давления обеспечивается, когда воздушный зазор устанавливается между датчиком 50 и дисплеем 45 или между датчиком 50 и защитным покрытием, поверх которого пользователь взаимодействует, например, с помощью пальца 46, стилуса 200 и/или маркера 47. Согласно некоторым вариантам осуществления настоящего изобретения датчик 50 задействуется, чтобы распознавать местоположение токопроводящих объектов, например, стилуса 200, пальца 46 и/или маркера 47, и обнаруживать давление, прикладываемое взаимодействующим объектом, например, токопроводящим или непроводящим объектом 48. Согласно некоторым вариантам осуществления настоящего изобретения, и местоположение, и давление распознаются на основе выходного сигнала от токопроводящих дорожек 58. Согласно некоторым вариантам осуществления настоящего изобретения, давление, распознаваемое с помощью датчика 50, прикладывается, чтобы обнаруживать координаты непроводящего объекта 48, взаимодействующего с датчиком 50, и/или чтобы обнаруживать координаты объекта, например, токопроводящего или непроводящего объекта, взаимодействующего с датчиком 50, в то время как поверхность взаимодействия датчика 50 погружена в воду и/или содержит капли воды. Согласно некоторым вариантам осуществления настоящего изобретения схема 25 цифрового преобразователя включает в себя специализированную схему 251 для обнаружения местоположения и специализированную схему обнаружения давления для обнаружения местоположения и/или давления из данных, отобранных из датчика 50.
В типичном варианте, выходной сигнал из схемы 25 цифрового преобразователя сообщается хосту 22. В типичном варианте, выходной сигнал, предоставленный схемой 25 цифрового преобразователя, может включать в себя координаты пишущего кончика 20 стилуса 200, информацию, переданную стилусом 200, координаты одного или более кончиков пальцев 46, координаты одного или более маркеров 47, давление, приложенное кончиком 20 стилуса, кончиком пальца 46, маркерами 47, и/или давление, приложенное непроводящим объектом 48. В типичном варианте, схема 25 цифрового преобразователя использует как аналоговую, так и цифровую обработку, чтобы обрабатывать сигналы, обнаруженные с помощью датчика 50 цифрового преобразователя. Необязательно, некоторые и/или все функциональные возможности специализированных схем 251 и 252 объединены в один или более процессоров, приспособленных для управления работой датчика 50 цифрового преобразователя. Необязательно, некоторые и/или все функциональные возможности схемы 25 цифрового преобразователя, специализированных схем 251 и 252 объединяются и/или включаются в хост 22.
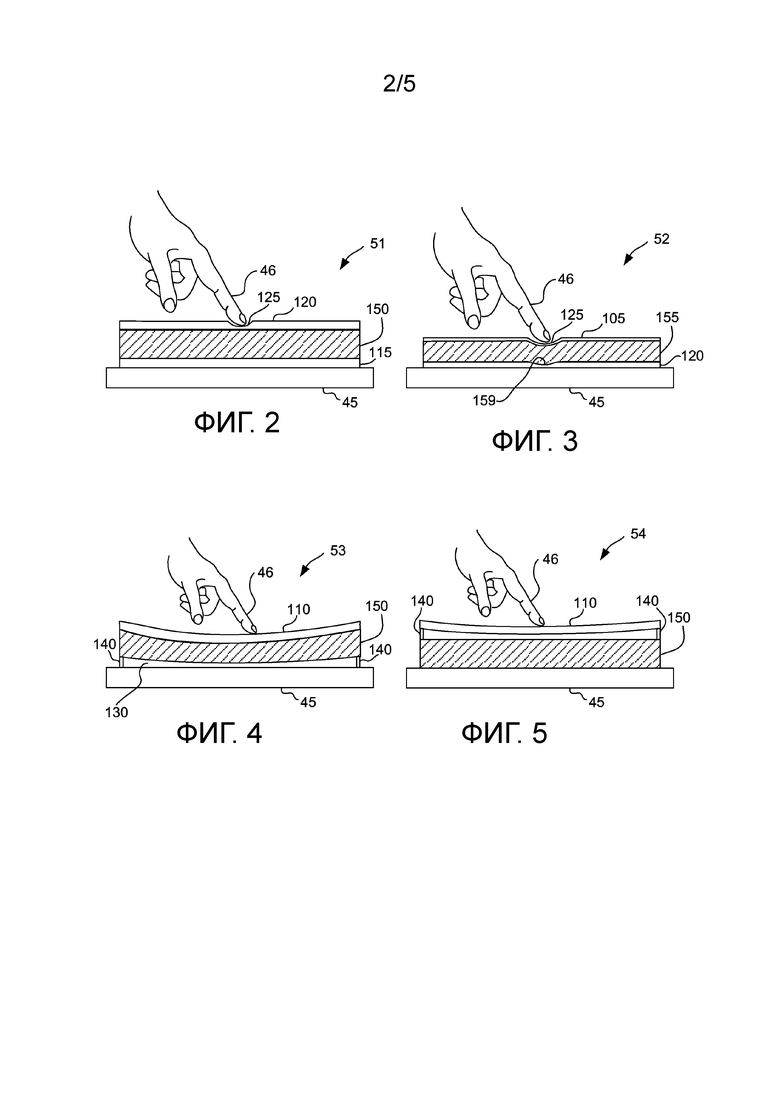
Далее выполняется ссылка на фиг. 2, который является упрощенным примерным схематичным чертежом, показывающим взаимодействие с емкостным датчиком, включающим в себя упругую поверхность взаимодействия в соответствии с некоторыми вариантами осуществления настоящего изобретения. Согласно некоторым вариантам осуществления настоящего изобретения датчик 51 включает в себя чувствительный слой 150, наложенный на дисплей 45 и покрытый упругим слоем 120. В типичном варианте, датчик 51 аналогичен датчику 50 и включает в себя структуру токопроводящих дорожек 58 на чувствительном слое 150, которая обеспечивает выполнение емкостного обнаружения, например, обнаружение взаимной и/или собственной емкости. Необязательно, чувствительный слой 150 прикрепляется на дисплей 45 с помощью слоя клея 115. В некоторых примерных вариантах осуществления чувствительный слой 150 является стеклянной подложкой или другой жесткой подложкой. Необязательно, чувствительный слой имеет толщину 0,1-3 мм, например, толщину 0,7 мм. Токопроводящие дорожки 58 могут быть структурированы на одной или более поверхностях стеклянной подложки. Необязательно, токопроводящие дорожки 58 чувствительного слоя 150 структурируются на поверхности, обращенной к дисплею 45. Необязательно, токопроводящие дорожки 58 чувствительного слоя 150 структурируются на поверхности, обращенной к упругому слою 120. Альтернативно, в некоторых примерных вариантах осуществления, чувствительный слой 150 заменяется гибким чувствительным слоем, который включает в себя один или более слоев из PET-фольги, которые структурируются с токопроводящими дорожками 58.
Согласно некоторым вариантам осуществления настоящего изобретения упругий слой 120 формирует поверхность взаимодействия, на которой пользователь взаимодействует с датчиком 51 с помощью кончика пальца 46, стилуса или другого объекта. В типичном варианте, упругий слой 120 покрывает и защищает чувствительный слой 150. Согласно некоторым вариантам осуществления настоящего изобретения, упругий слой 120 локально сжимается в ответ на приложенное давление, например, давление, приложенное кончиком пальца 46. В типичном варианте, локальное сжатие упругого слоя 120 увеличивает сближение кончика 46 пальца с чувствительным слоем 150 и, тем самым, увеличивает емкостное влияние кончика пальца 46 на чувствительный слой 150. В некоторых примерных вариантах осуществления упругий слой 120 определяется, чтобы быть между 50-500 мкм по толщине, например, 50-200 мкм. В некоторых примерных вариантах осуществления упругий слой 120 формируется из мягкого материала, например, силикона или органического геля твердостью 20-40 единиц на дюрометре (по Шору). Необязательно, упругий слой 120 включает в себя твердую покрывающую пленку. В типичном варианте, твердая покрывающая пленка является взаимодействующей поверхностью датчика 51. Необязательно, упругий слой 120 формируется с матрицей точечных разделительных элементов, покрытых твердой покрывающей пленкой. Необязательно, точечные разделительные элементы 170 формируются из материала, имеющего твердость между 20-40 единицами на дюрометре (по Шору). Необязательно, диаметр точечных разделительных элементов 170 равен 20-200 мкм. Необязательно, точечные разделительные элементы 170 аналогичны элементам, используемым для датчиков цифрового преобразователя резистивного типа.
В некоторых примерных вариантах осуществления, выходной сигнал, предоставляемый датчиком 51 в ответ на прикосновение, более четко выражается с помощью приложенного давления вследствие увеличения в сближении. В типичном варианте, выходной сигнал чувствителен к величине давления, прикладываемого кончиком пальца 46. В типичном варианте, когда пользователь прикладывает увеличивающееся давление, упругий слой 120 дополнительно сжимается, сближение с чувствительным слоем 150 увеличивается, и емкостная связь со слоем 150 датчика увеличивается. В типичном варианте, утечка сигнала для инициирующих сигналов, прикладываемых к токопроводящим дорожкам 58, увеличивается, когда сближение кончика пальца 46 с чувствительным слоем 150 увеличивается.
Согласно некоторым вариантам осуществления настоящего изобретения датчик 51 адаптируется для использования под водой. В типичном варианте, впадина или лунка 125 создается, когда кончик пальца 46 нажимает на упругий слой 120. В то время как датчик 51 находится под водой, лунка 125 в типичном варианте заполняется водой, и дополнительная концентрация воды во впадине 125 создает локальный емкостный эффект с чувствительным слоем 150 в местоположении лунки 125. В некоторых примерных вариантах осуществления может быть обнаружено и/или отслежено более одного взаимодействующего объекта, например, токопроводящего и/или непроводящего, когда лунки 125 формируются и заполняются водой во время взаимодействия. В типичном варианте, объем и глубина впадины 125 и, следовательно, емкостный эффект, увеличиваются с увеличением в прикладываемом давлении.
Далее выполняется ссылка на фиг. 3, который является упрощенным схематичным чертежом, показывающим взаимодействие с примерным гибким емкостным датчиком, включающим в себя упругий слой, покрывающий поверхность датчика, который покрывает дисплей в соответствии с некоторыми вариантами осуществления настоящего изобретения. Согласно некоторым вариантам осуществления настоящего изобретения датчик 52 включает в себя гибкий чувствительный слой 155, упругий слой 120, расположенный между дисплеем 45 и чувствительным слоем 155, и защитный слой 105. В типичном варианте, датчик 52 аналогичен датчику 50 и включает в себя структуру токопроводящих дорожек 58 на чувствительном слое 155, которая обеспечивает выполнение емкостного обнаружения, например, обнаружение взаимной и/или собственной емкости. Необязательно, гибкий чувствительный слой 155 формируется из одного или более слоев PET-фольги. Необязательно, когда используется более одного слоя PET-фольги, один слой PET-фольги включает в себя токопроводящие дорожки строк, а другой слой PET-фольги включает в себя токопроводящие дорожки столбцов.
Согласно некоторым вариантам осуществления настоящего изобретения, защитное покрытие 105, чувствительный слой 155 и упругий слой 120 деформируются, когда давление прикладывается пользователем, например, с помощью кончика пальца 46. Согласно некоторым вариантам осуществления настоящего изобретения упругий слой 120 локально сжимается в области пересечения 159, и область 159 чувствительного слоя 155 приближается к дисплею 45. В типичном варианте, дисплей 45 действует в качестве земли и/или заземляется.
Согласно некоторым вариантам осуществления настоящего изобретения приближение области 159 к дисплею 45 ведет к утечке связанных сигналов в области 159 во время емкостного обнаружения. В типичном варианте, когда кончик пальца 46 взаимодействует с датчиком 52, эта утечка присутствует в дополнение к утечке сигнала вследствие присутствия кончика пальца 46. Необязательно, в подводных условиях утечка присутствует в дополнение к утечке сигнала вследствие присутствия воды в лунке 125. В типичном варианте, локальная утечка сигнала вследствие локального приближения дисплея 45 дополнительно уменьшает амплитуду связанных сигналов в области 159, например, области прикосновения. В типичном варианте, утечка чувствительна к расстоянию между чувствительным слоем 155 и дисплеем 45 и увеличивается, когда сближение между областью 159 и дисплеем 45 увеличивается. В типичном варианте, это увеличение может быть обнаружено из дискретизированного выходного сигнала. Согласно некоторым вариантам осуществления настоящего изобретения, локальная утечка сигнала вследствие локального приближения дисплея 45 обеспечивает обнаружение позиции непроводящего объекта и/или обнаружение позиции, в то время как датчик 52 погружен в воду. В типичном варианте, амплитуда обнаруженного выходного сигнала связывается с давлением, прикладываемым непроводящим объектом.
Далее выполняется ссылка на фиг. 4, которая является упрощенным схематичным чертежом, показывающим взаимодействие с примерным емкостным датчиком, включающим в себя разделители вдоль краев датчика, которые обеспечивают воздушный зазор между датчиком и дисплеем в соответствии с некоторыми вариантами осуществления настоящего изобретения. Согласно некоторым вариантам осуществления настоящего изобретения, датчик 53 включает в себя чувствительный слой 150, установленный на предварительно определенной высоте над дисплеем 45, с одним или более разделителями и/или рамкой 140 и защитным покрытием 110. Необязательно, предварительно определенная высота равна 0,1-0,8 мм над дисплеем 45. В некоторых примерных вариантах осуществления защитное покрытие 110 формируется из стекла или твердого пластика и в типичном варианте является жестким. Альтернативно, покрытие 110 заменяется покрытием, сформированным из упругого материала, который локально сжимается в ответ на приложенное давление с помощью взаимодействующего объекта.
Согласно некоторым вариантам осуществления настоящего изобретения, чувствительный слой 150 изгибается и/или прогибается в ответ на давление, приложенное кончиком пальца 46. В некоторых примерных вариантах осуществления прогиб чувствительного слоя 150 уменьшает локальный объем воздуха между дисплеем 45 и чувствительным слоем 150 по направлению к и под вершиной прогнувшегося слоя и уменьшает диэлектрическую постоянную между дисплеем 45 и чувствительным слоем 150 рядом с вершиной. В типичном варианте, емкостная связь между чувствительным слоем 150 и дисплеем 45 увеличивается, когда воздушный зазор 130 уменьшается вследствие прогиба слоя 150 датчика. Согласно некоторым вариантам осуществления настоящего изобретения увеличение в емкостный связи влияет на выходной сигнал, обнаруживаемый на чувствительном слое 150, и используется, чтобы обнаруживать давление, прикладываемое кончиком пальца 46. Согласно некоторым вариантам осуществления настоящего изобретения, когда кончик пальца 46 касается датчика 53, но не прикладывает давление, воздействие на измеренный сигнал локализуется около области касания и присутствует вследствие изменения в емкости, вызванного воздействием пальца. Однако, когда палец касается датчика и прикладывает давление, присутствует также широкое воздействие на измеренный выходной сигнал вследствие прогиба чувствительного слоя 150, которое накладывается на локальное воздействие. Это описывается более подробно в данном документе ниже в отношении фиг. 8.
В некоторых примерных вариантах осуществления давление, прикладываемое непроводящим объектом, может быть обнаружено с помощью датчика 53. Необязательно, местоположение непроводящего объекта, нажимающего на датчик 53, обнаруживается с более низким разрешением по сравнению с обнаружением, которое выполняется вследствие присутствия кончика пальца 46.
Далее выполняется ссылка на фиг. 5, который является упрощенным схематичным чертежом, показывающим взаимодействие с примерным емкостным датчиком, включающим в себя разделители вдоль краев датчика, которые обеспечивают воздушный зазор между защитным покрытием и датчиком в соответствии с некоторыми вариантами осуществления настоящего изобретения. Согласно некоторым примерным вариантам осуществления настоящего изобретения датчик 54 включает в себя воздушный зазор 130 между защитным слоем 110, сформированным из жесткого материала, и чувствительным слоем 150. Согласно некоторым вариантам осуществления настоящего изобретения, емкостная связь между кончиком пальца 46 и чувствительным слоем 150 в месте пересечения увеличивается, когда защитное покрытие 110 приближается к чувствительному слою 150.
В некоторых примерных вариантах осуществления давление, прикладываемое непроводящим объектом, может также быть обнаружено с помощью датчика 54. Необязательно, местоположение непроводящего объекта, нажимающего на датчик 54, обнаруживается с более низким разрешением по сравнению с обнаружением, которое выполняется вследствие присутствия кончика пальца 46.
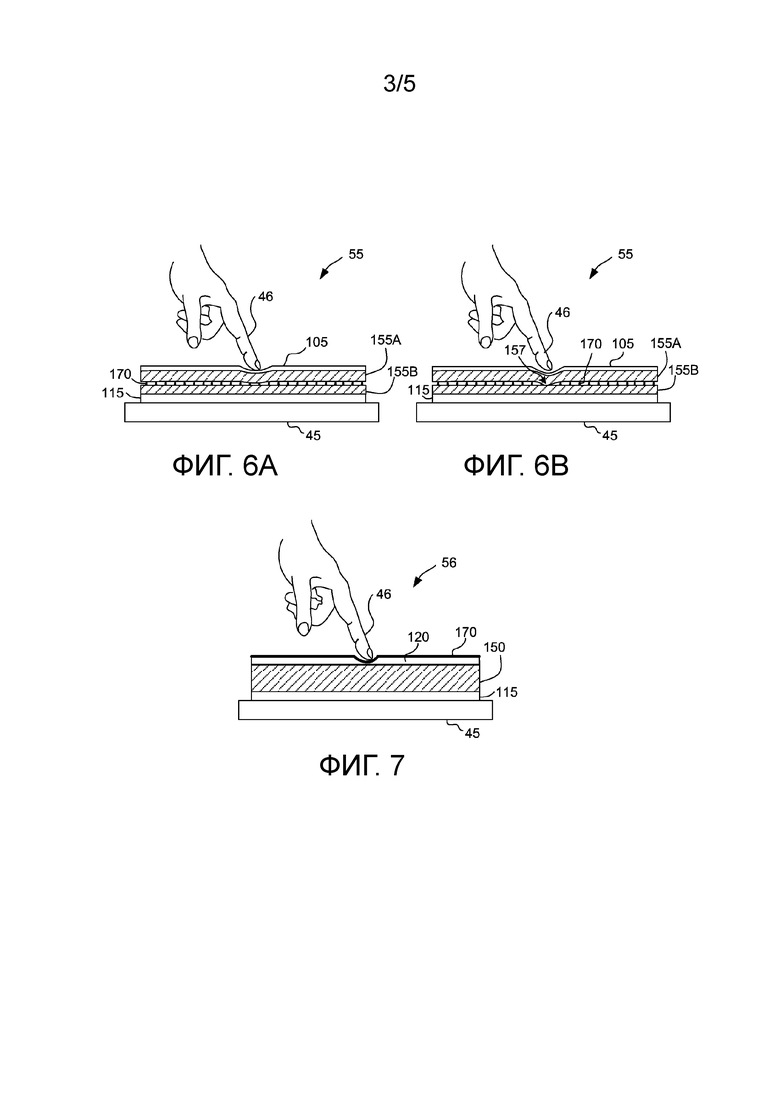
Далее выполняется ссылка на фиг. 6A и 6B, которые являются упрощенными схематичными чертежами, показывающими взаимодействие с примерным емкостным датчиком, сформированным с двумя чувствительными слоями, разделенными точечными разделительными элементами в соответствии с некоторыми вариантами осуществления настоящего изобретения. Согласно некоторым примерным вариантам осуществления настоящего изобретения датчик 54 включает в себя гибкий чувствительный слой 155, сформированный из первого слоя 155A и второго слоя 155B, разделенных матрицей и/или сеткой точечных разделительных элементов 170. В типичном варианте, один из слоев включает в себя токопроводящие дорожки 58 строк, а другой слой включает в себя токопроводящие дорожки 58 столбцов. В некоторых примерных вариантах осуществления точечные разделительные элементы 170 структурируются на одном из чувствительных слоев 155. В типичном варианте, точечные разделительные элементы 170 формируются из упругого материала. Необязательно, точечные разделительные элементы 170 формируются из материала, имеющего твердость между 20-40 единицами на дюрометре (по Шору). Необязательно, диаметр точечных разделительных элементов 170 равен 20-200 мкм. Необязательно, точечные разделительные элементы 170 аналогичны элементам, используемым для датчиков цифрового преобразователя резистивного типа. Согласно некоторым вариантам осуществления настоящего изобретения, датчик 55 дополнительно включает в себя защитный слой 105, поверх которого пользователь взаимодействует с датчиком 55. Согласно некоторым вариантам осуществления настоящего изобретения, давление, прикладываемое кончиком пальца 46, локально уменьшает расстояние между чувствительным слоем 155A и чувствительным слоем 155B в месте касания. Уменьшение расстояния между слоями в типичном варианте увеличивает емкостную связь между слоями и увеличивает амплитуду связанного сигнала. В типичном варианте, присутствие кончика пальца 46 имеет противоположный эффект уменьшения амплитуды связанного сигнала. Согласно некоторым вариантам осуществления настоящего изобретения, физическое соприкосновение между слоем 155A и слоем 155B возникает выше предварительно определенного давления. В некоторых примерных вариантах осуществления, когда токопроводящие дорожки структурируются на обращенных друг к другу поверхностях слоя 155A и слоя 155B, физическое соприкосновение 157 приводит к короткому замыканию в месте касания. Альтернативно, когда токопроводящие дорожки структурируются на необращенных друг к другу поверхностях слоя 155A и слоя 155B, сближение между слоями увеличивает емкостную связь, и слои не замыкаются накоротко, когда контакт устанавливается. В типичном варианте, амплитуда сигнала, передаваемого вследствие короткого замыкания, является такой же, что амплитуда прикладываемого инициирующего сигнала. Согласно некоторым вариантам осуществления настоящего изобретения датчик 55 может быть использован для распознавания как позиции, так и давления, прикладываемого взаимодействующим объектом, который является непроводящим. Амплитуда выходного сигнала в ответ на прикладываемое давление будет увеличиваться, когда давление увеличивается. Согласно некоторым вариантам осуществления настоящего изобретения датчик 55 может быть использован под водой, и/или когда пользователь носит перчатки, а также пассивное перо.
Далее выполняется ссылка на фиг. 7, который является упрощенным схематичным чертежом, показывающим взаимодействие с примерным емкостным датчиком, включающим в себя упругую поверхность взаимодействия, которая является токопроводящей, в соответствии с некоторыми вариантами осуществления настоящего изобретения. Согласно некоторым примерным вариантам осуществления настоящего изобретения датчик 57 включает в себя чувствительный датчик 150, наложенный на дисплей 45 и покрытый упругим слоем 120, который обеспечивает поверхность взаимодействия, поверх которой кончик пальца 46 или другой взаимодействующий объект выполняет взаимодействие. Согласно некоторым примерным вариантам осуществления настоящего изобретения упругий слой 120 покрывается токопроводящим материалом 170. В типичном варианте, токопроводящий материал 170 наносится на поверхность взаимодействия. Согласно некоторым примерным вариантам осуществления настоящего изобретения емкостный эффект достигается посредством локального нажатия на токопроводящую поверхность 170 по направлению к чувствительному слою 150. В некоторых примерных вариантах осуществления, когда токопроводящая поверхность 170 является плавающей, кончик пальца 46 нажимает на токопроводящую поверхность 170 во время емкостного обнаружения, связанный сигнал утекает, поскольку кончик пальца 46 заземлен, и амплитуда связанного сигнала уменьшается. Альтернативно, давление, прикладываемое непроводящим объектом или незаземленным объектом во время емкостного обнаружения, увеличивает амплитуду связанного сигнала.
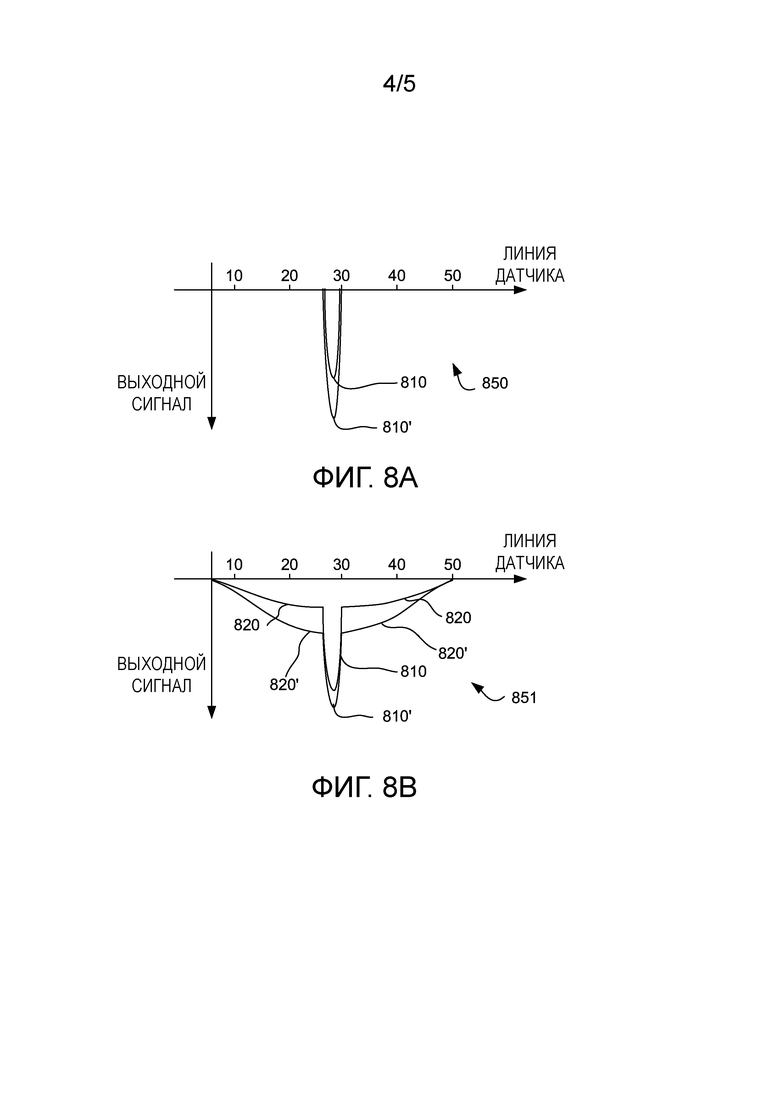
Далее выполняется ссылка на фиг. 8A и 8B, которые показывают упрощенные схематичные графики примерного чувствительного к давлению выходного сигнала, обнаруживаемого с помощью двух примерных чувствительных к давлению датчиков в соответствии с некоторыми вариантами осуществления настоящего изобретения. Согласно некоторым примерным вариантам осуществления настоящего изобретения график 850 представляет примерный выходной сигнал, полученный от датчика 51, датчика 52 и/или датчика 56. Согласно некоторым примерным вариантам осуществления настоящего изобретения присутствие кончика пальца 46 на датчике без приложения давления приводит в результате к острому пику в месте взаимодействия. В типичном варианте, ширина пика, по существу, определяется шириной кончика 46 пальца. Согласно некоторым вариантам осуществления настоящего изобретения высота пика 808 увеличивается, например, до высоты пика 808', когда кончик пальца 46 прикладывает давление на датчике. Согласно некоторым вариантам осуществления настоящего изобретения координаты кончика пальца 46 обнаруживаются из местоположения пика 808, и давление, прикладываемое кончиком пальца 46, обнаруживается на основе амплитуды пика 808. Необязательно, обнаруженная высота пика 808, когда давление не прикладывается, предварительно определяется и сравнивается с обнаруженной высотой для определения приложенного давления.
Согласно некоторым примерным вариантам осуществления настоящего изобретения график 851 представляет примерный выходной сигнал, полученный от датчика 53. Согласно некоторым вариантам осуществления настоящего изобретения емкостный эффект вследствие присутствия пальца 46 приводит в результате к острому пику 810 в месте касания, а емкостный эффект вследствие приложенного давления приводит в результате к более широко развернутому своду 820, который возникает вследствие прогиба слоя 150 датчика в ответ на приложенное давление. Согласно некоторым вариантам осуществления настоящего изобретения высота свода 820 увеличивается с увеличением давления. Свод 820' представляет выходной сигнал, когда кончик пальца 46 нажимает на датчик 53 с большим давлением по сравнению со сводом 820. В типичном варианте, высота пика 810 также увеличивается с увеличением давления. Пик 810' представляет выходной сигнал, когда кончик пальца 46 нажимает на датчик 53 с большим давлением по сравнению с пиком 810. Согласно некоторым примерным вариантам осуществления настоящего изобретения обнаружение давления основывается на высоте свода 820, а обнаружение координат основывается на местоположении пика 810.
В графике 850 и графике 851 связанный сигнал вследствие кончика пальца 46 уменьшается, после того как кончик пальца заземляется и дает утечку связанному сигналу. В некоторых примерных вариантах осуществления, например, когда маркер используется для взаимодействия, связанный сигнал увеличивается, например, пик находится в положительном направлении. График 850 и график 851 показывают профили в одном из направлений строк или столбцов. В типичном варианте, практически такой же профиль получается в другом направлении строк или столбцов для симметричных объектов. В типичном варианте, форма пика 810 зависит от формы взаимодействующего объекта.
Далее выполняется ссылка на фиг. 9, показывающий упрощенную блок-схему последовательности операций примерного способа для обнаружения координат взаимодействия и давления, прикладываемого во время взаимодействия, в соответствии с некоторыми вариантами осуществления настоящего изобретения. Согласно некоторым вариантам осуществления настоящего изобретения емкостное обнаружение применяется, чтобы обнаруживать выходной сигнал от чувствительного к давлению емкостного датчика, как описано в данном документе (блок 905). Согласно некоторым вариантам осуществления настоящего изобретения идентифицируется выходной сигнал, предоставляющий информацию, касающуюся места взаимодействия (блок 910). В некоторых примерных вариантах осуществления выходной сигнал, полученный вследствие емкостной связи между взаимодействующим объектом и емкостным датчиком, обнаруживается и/или различается от выходного сигнала, полученного вследствие изгиба и/или нажатия на емкостный датчик. Альтернативно и/или в некоторых других вариантах осуществления, не выполняется различение между выходным сигналом, получающимся в результате приложенного давления, и выходным сигналом, получающимся в результате емкостной связи вследствие присутствия взаимодействующего объекта.
Согласно некоторым вариантам осуществления настоящего изобретения идентифицируется выходной сигнал, предоставляющий информацию, относящуюся к давлению, прикладываемому взаимодействующим объектом (блок 915). В типичном варианте, амплитуда выходного сигнала связывается с давлением, прикладываемым взаимодействующим объектом. Согласно некоторым вариантам осуществления настоящего изобретения координаты взаимодействия касанием обнаруживаются на основе одной или более информации о касании и давлении (блок 920). Согласно некоторым вариантам осуществления настоящего изобретения обнаруживается давление, прикладываемое во время взаимодействия (блок 925). Согласно некоторым вариантам осуществления настоящего изобретения, по меньшей мере, одно из местоположения и/или давления сообщается хост-компьютеру (блок 930).
Хотя большинство вариантов осуществления настоящего изобретения было описано со ссылкой на кончик пальца, взаимодействующий с емкостным датчиком, понятно, что взаимодействие кончиком пальца является лишь примерным, и что емкостные датчики, описанные в данном документе, также функционируют, чтобы обнаруживать взаимодействие с другими объектами.
Аспект некоторых вариантов осуществления настоящего изобретения предоставляет датчик, включающий в себя: слой датчика, структурированный с помощью токопроводящих элементов, распределенных по слою датчика, при этом токопроводящие элементы электрически изолируются друг от друга, и при этом слой датчика конфигурируется для емкостного распознавания; и упругий слой поблизости от слоя датчика, слой датчика конфигурируется, чтобы обнаруживать локальные сжатия на основе давления, прикладываемого к упругому слою.
Необязательно, упругий слой конфигурируется, чтобы сжиматься дифференциально в ответ на дифференциальное давление.
Необязательно, упругий слой имеет толщину 50-500 мкм.
Необязательно, упругий слой формируется с точечными разделительными элементами.
Необязательно, упругий слой покрывается токопроводящим материалом.
Необязательно, токопроводящий материал наносится на поверхность упругого слоя, которая обращена от слоя датчика.
Необязательно, слой датчика формируется из жесткой подложки, структурированной с помощью токопроводящих элементов.
Необязательно, слой датчика имеет толщину 0,1-1 мм.
Необязательно, слой датчика является восприимчивым к давлению.
Аспект некоторых вариантов осуществления настоящего изобретения предоставляет датчик, включающий в себя: слой датчика, сформированный с гибкой подложкой и структурированный с помощью токопроводящих элементов, распределенных по слою датчика, при этом токопроводящие элементы электрически изолируются друг от друга, и при этом слой датчика конфигурируется для емкостного распознавания; и матрицу точечных разделительных элементов поблизости от слоя датчика и обеспечивающих поверхность, поверх которой устанавливается слой датчика.
Необязательно, точечные разделительные элементы конфигурируются, чтобы сжиматься дифференциально в ответ на дифференциальное давление.
Необязательно, диаметр точечных разделительных элементов равен 20-200 мкм.
Необязательно, слой датчика функционирует, чтобы изгибаться в месте взаимодействия в ответ на давление, прикладываемое объектом, взаимодействующим с датчиком.
Аспект некоторых вариантов осуществления настоящего изобретения предоставляет датчик, включающий в себя: слой датчика, сформированный с жесткой подложкой и структурированный с помощью токопроводящих элементов, распределенных по слою датчика, при этом токопроводящие элементы электрически изолируются друг от друга, и при этом слой датчика конфигурируется для емкостного распознавания; и разделитель, расположенный по периметру слоя датчика, разделитель конфигурируется для установки слоя датчика поверх дисплея на предварительно определенной высоте над дисплеем со слоем воздушного зазора, сформированным между ними.
Необязательно, слой датчика конфигурируется, чтобы прогибаться на основе давления, прикладываемого объектом, взаимодействующим с датчиком.
Необязательно, объем воздуха в воздушном зазоре устраняется на основе прогиба датчика.
Необязательно, слой датчика конфигурируется, чтобы прогибаться дифференциально в ответ на дифференциальное давление, прикладываемое объектом, взаимодействующим с датчиком.
Необязательно, слой датчика имеет толщину 0,3-0,1 мм.
Необязательно, слой датчика является восприимчивым к давлению.
Аспект некоторых вариантов осуществления настоящего изобретения предоставляет датчик, включающий в себя: слой датчика, структурированный с помощью токопроводящих элементов, распределенных по слою датчика, при этом токопроводящие элементы электрически изолируются друг от друга, и при этом датчик конфигурируется для емкостного распознавания; и покрывающий слой, сформированный с помощью жесткого материала, который функционирует, чтобы покрывать слой датчика и предоставлять поверхность, над которой пользователь взаимодействует с датчиком; разделитель, расположенный по периметру покрывающего слоя, разделитель сконфигурирован для установки покрывающего слоя поверх на предварительно определенной высоте над слоем датчика со слоем воздушного зазора, сформированным между ними.
Необязательно, слой датчика формируется с помощью жесткого материала.
Необязательно, слой датчика имеет толщину 0,3-0,1 мм.
Необязательно, покрывающий слой имеет толщину 0,3-0,1 мм.
Аспект некоторых вариантов осуществления настоящего изобретения предоставляет датчик, включающий в себя: слой датчика, включающий в себя первый подслой, структурированный с помощью первой матрицы токопроводящих элементов, и второй подслой, структурированный с помощью второй матрицы токопроводящих элементов, оба распределены по слою датчика, при этом токопроводящие элементы электрически изолируются друг от друга, и при этом датчик конфигурируется для емкостного распознавания; и матрицу точечных разделительных элементов, отделяющих первый подслой от второго подслоя, при этом точечные разделительные элементы конфигурируются, чтобы сжиматься на основе давления, прикладываемого объектом, взаимодействующим с датчиком.
Необязательно, первый подслой конфигурируется, чтобы касаться второго подслоя в месте взаимодействия на основе предварительно определенного давления, прикладываемого на датчике объектом, взаимодействующим с датчиком.
Необязательно, токопроводящие элементы структурируются в виде сетки.
Необязательно, датчик конфигурируется, чтобы обнаруживать объект, взаимодействующий, в то время как вода присутствует на поверхности, поверх которой пользователь осуществляет взаимодействие с датчиком.
Необязательно, датчик конфигурируется, чтобы обнаруживать объект, который является непроводящим.
Некоторые отличительные признаки примеров, описанных в данном документе, которые, для ясности, описываются в контексте отдельных вариантов осуществления, могут также быть предоставлены в комбинации в одном варианте осуществления. Наоборот, различные признаки вариантов осуществления, описанных в данном документе, которые, для краткости, описываются в контексте одного варианта осуществления, могут также быть предоставлены отдельно или в любой подходящей подкомбинации или как подходящие в любом другом описанном варианте осуществления изобретения. Некоторые отличительные признаки, описанные в контексте различных вариантов осуществления, не должны считаться неотъемлемыми признаками этих вариантов осуществления, пока вариант осуществления не будет неработоспособным без таких элементов.
Изобретение относится к емкостному датчику цифрового преобразователя. Техническим результатом является обеспечение возможности фиксации взаимодействия объекта в то время, как чувствительная поверхность емкостного датчика является мокрой и/или находится под водой. Емкостный датчик цифрового преобразователя содержит: слой датчика, наложенный на дисплей и покрытый упругим слоем, при этом слой датчика содержит структуру токопроводящих элементов, распределенных по слою датчика, причем токопроводящие элементы электрически изолированы друг от друга, при этом слой датчика сконфигурирован для емкостного распознавания; причем слой датчика приспособлен обнаруживать локальные сжатия на основе давления, прикладываемого к упругому слою, при этом упругий слой сформирован с матрицей точечных разделительных элементов, покрытых твердой покрывающей пленкой, причем точечные разделительные элементы сформированы из материала, имеющего твердость между 20-40 единицами на дюрометре (по Шору), и твердая покрывающая пленка представляет собой поверхность взаимодействия датчика, с которой взаимодействует пользователь. 2 н. и 12 з.п. ф-лы, 11 ил.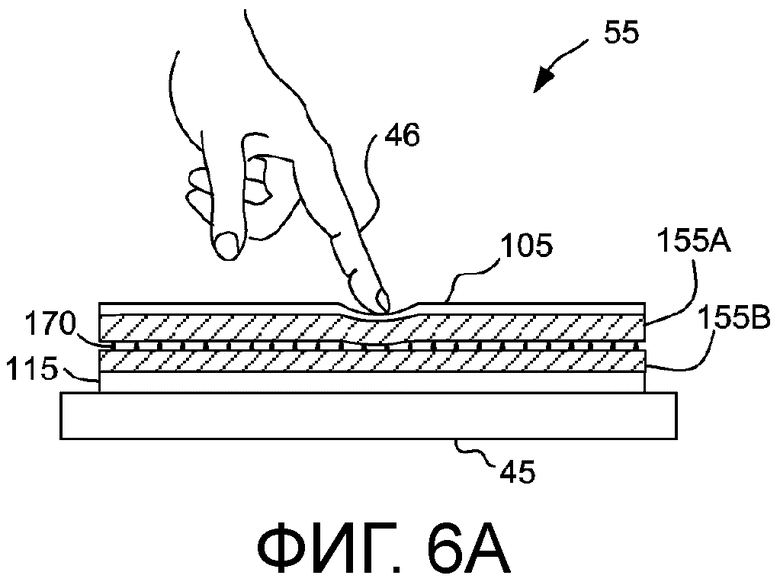
1. Емкостный датчик цифрового преобразователя, содержащий:
слой датчика, наложенный на дисплей и покрытый упругим слоем, при этом слой датчика содержит структуру токопроводящих элементов, распределенных по слою датчика, причем токопроводящие элементы электрически изолированы друг от друга, при этом слой датчика сконфигурирован для емкостного распознавания;
причем слой датчика приспособлен обнаруживать локальные сжатия на основе давления, прикладываемого к упругому слою, при этом упругий слой сформирован с матрицей точечных разделительных элементов, покрытых твердой покрывающей пленкой, причем точечные разделительные элементы сформированы из материала, имеющего твердость между 20-40 единицами на дюрометре (по Шору), и твердая покрывающая пленка представляет собой поверхность взаимодействия датчика, с которой взаимодействует пользователь.
2. Датчик по п. 1, в котором упругий слой приспособлен сжиматься дифференциально в ответ на дифференциальное давление.
3. Датчик по п. 1, в котором упругий слой имеет толщину 50-500 мкм.
4. Датчик по п. 1, в котором упругий слой покрыт токопроводящим материалом.
5. Датчик по п. 4, в котором токопроводящий материал нанесен на поверхность упругого слоя, которая обращена от слоя датчика.
6. Датчик по п. 1, в котором слой датчика сформирован из жесткой подложки, содержащей структуру токопроводящих элементов.
7. Датчик по п. 1, в котором слой датчика имеет толщину 0,1-1 мм.
8. Датчик по п. 1, в котором слой датчика является восприимчивым к давлению.
9. Датчик по п. 1, в котором токопроводящие элементы структурированы в виде сетки.
10. Датчик по п. 1, при этом датчик приспособлен обнаруживать объект, взаимодействующий в то время, как вода присутствует на поверхности взаимодействия.
11. Датчик по п. 1, при этом датчик приспособлен обнаруживать объект, который является непроводящим.
12. Емкостный датчик цифрового преобразователя, содержащий:
слой датчика, наложенный на дисплей и включающий в себя первый подслой, содержащий структуру в виде первой матрицы токопроводящих элементов, и второй подслой, содержащий структуру в виде второй матрицы токопроводящих элементов, обе из которых распределены по слою датчика, причем токопроводящие элементы электрически изолированы друг от друга, при этом датчик сконфигурирован для емкостного распознавания; и
матрицу точечных разделительных элементов, отделяющих первый подслой от второго подслоя, при этом точечные разделительные элементы покрытых твердой покрывающей пленкой и приспособлены сжиматься на основе давления, прикладываемого объектом, взаимодействующим с датчиком, причем точечные разделительные элементы сформированы из материала, имеющего твердость между 20-40 единицами на дюрометре (по Шору).
13. Датчик по п. 12, в котором первый подслой приспособлен касаться второго подслоя в месте взаимодействия на основе предварительно определенного давления, прикладываемого на датчике объектом, взаимодействующим с датчиком.
14. Датчик по п. 12, при этом датчик сконфигурирован обнаруживать объект, взаимодействующий в то время, как вода присутствует на поверхности, по которой пользователь осуществляет взаимодействие с датчиком.
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| ОДНОСТОРОННИЙ ЕМКОСТНОЙ ДАТЧИК УСИЛИЯ ДЛЯ ЭЛЕКТРОННЫХ УСТРОЙСТВ | 2009 |
|
RU2454702C1 |
| ЕМКОСТНОЙ ДАТЧИК ДАВЛЕНИЯ, УСТАНАВЛИВАЕМЫЙ НА ПОДСТАВКЕ (ВАРИАНТЫ), СНИЖАЮЩАЯ ДАВЛЕНИЕ ПОДСТАВКА И СПОСОБ АНОДНОГО СОЕДИНЕНИЯ ДВУХ ПЛАСТИН | 1993 |
|
RU2120117C1 |

