Изобретение относится к гидроакустике, а именно к комбинированным акустическим приемникам и может быть использовано для проведения векторно-скалярных измерений параметров гидроакустических полей океана. Векторные приемники играют важную роль в исследовании гидроакустических полей океана в связи с тем, что обладают характеристикой направленности в рабочем диапазоне, что представляет ценность в ряде применений. В зависимости от принципа работы выделяют несколько различных типов векторных приемников, в частности, существуют так называемые приемники инерционного типа (Скребнев Г.К. Комбинированные гидроакустические приемники. Спб.: Элмор, 1997 г. с. 120). Данные приемники представляют собой тела, как правило, сферической формы, помещенные в водную среду и удерживаемые в нужном месте с помощью растяжек. Находящиеся внутри тела преобразователи непосредственного контакта с акустическим полем не имеют и реагируют на перемещение приемника в пространстве как акселерометры. Растяжки, на которых подвешивается тело, представляют собой упругие элементы, закрепляемые внутри некоторого каркаса. Как правило, каркас закрывается звукопрозрачным кожухом (обтекателем) с целью снизить влияние течения жидкости за счет возникающей турбулентности. При этом акселерометры генерируют сигналы, пропорциональные проекциям вектора колебательного ускорения, при условии расположения осей чувствительности акселерометров вдоль осей ортогональной системы координат, а сигнал, пропорциональный проекциям вектора колебательной скорости получают, интегрируя сигналы акселерометров. Для передачи сигналов потребителю корпус приемника, как правило, соединяют с потребителем путем кабельной линии. Для расчета потока мощности или формирования диаграммы направленности кардиоидного типа требуется дополнительно иметь в точке приема еще и гидрофон с целью получения сигнала, пропорционального скалярному давлению [Векторно-фазовые методы в акустике / В.А.Гордиенко, В.И. Ильичев, Л.Н. Захаров. - М.: Наука, 1989, с. 13].
При этом у известных существующих конструкций инерционного типа можно выделить ряд недостатков присущих всем приемникам, независимо от типа датчиков, используемых для регистрации соколебательного движения: пьезоэлектрических, емкостных, магнитострикционных или электродинамических. Это связано с аналоговым характером сигналов, существующих на выходах вышеназванных датчиков и, соответственно, методов передачи этих сигналов потребителю, обязательно включающих в себя усилители электрических сигналов, построенные на существующей элементной базе с присущими неустранимыми ограничениями по динамическому диапазону, например, п. №89794 U1, п. РФ №2569201 С1.
Отдельно можно указать на недостаток, связанный с размещением регистрирующих датчиков внутри корпуса комбинированного приемника, из-за чего возникает необходимость приведения средней плотности корпуса с установленными внутри датчиками к плотности воды, что накладывает ограничения на минимальные габариты корпуса, в котором эти датчики должны быть размещены.
Для приемников инерционного типа, измеряющих компоненты вектора акустического ускорения, необходимость повышения чувствительности автоматически требует применения инерционной массы большей величины (при заданных, например, пьезопреобразователях датчиков), что требует применения корпуса больших размеров для поддержания должной величины средней плотности, но при этом просто увеличить размеры корпуса нельзя, так как при этом снижается резонансная частота и уменьшается прочность; для преодоления этих тенденций необходимо также увеличить толщину стенки корпуса, что, в свою очередь требует еще большего увеличения габаритного размера с целью компенсации увеличившегося веса.
Одним из недостатков известных конструкций приемников инерционного типа является ограничение динамического диапазона, существующее из-за применения выпускаемых промышленностью радиоэлементов (например, транзисторов, операционных усилителей и АЦП), обладающих входным омическим сопротивлением, являющимися (помимо прочих) источником тепловых шумов, ограничивающим динамический диапазон снизу, и использующих определенные напряжения питания, ограничивающие динамический диапазон сверху (п. РФ №2509320 С1).
Известно, что получение сигналов, пропорциональных проекциям вектора колебательного ускорения связано с возникновением сил инерции, и для повышения чувствительности приемника следует повышать величину инерционной массы, что, при условии сохранения средней плотности, ведет к росту объема корпуса приемника, что, в свою очередь, отрицательно сказывается на эксплуатационных характеристиках, снижая допустимую верхнюю частоту, увеличивая габариты устройств, использующих приемник в своем составе, а также увеличивая стоимость самого приемника.
Описана конструкция приемника соколеблющегося типа с инерционной массой, измеряющего колебательное ускорение [Скребнев Г.К. Комбинированные гидроакустические приемники. Спб. :Элмор, 1997 г., с. 120]. Но для расчетов потока мощности акустического поля необходимо знать колебательную скорость, для чего в составе данного приемника должен быть предусмотрен интегратор, что усложняет его архитектуру. Кроме того, приемники колебательного ускорения имеют амплитудно-частотную характеристику, понижающуюся с понижением частоты, что ведет к нехватке чувствительности на нижних частотах рабочего диапазона.
Известен инерционный приемник, содержащий наполненное водой до определенного уровня сферическое тело, обеспечивающее нулевую плавучесть корпуса в рабочей среде. На поверхность сферического тела наклеены два биморфных пьезоэлемента, которые образуют гидрофонный канал, а само сферическое тело закрепляется с помощью упругих подложек в кольцевом корпусе, внутри которого расположены предварительные усилители. При этом на упругих подложках наклеены биморфные пьезоэлементы, подключенные должным образом ко входам предварительных усилителей, образуя векторные каналы. При этом силы, возникающие на сферическом теле под действием акустического поля вызывают деформации упругих подложек, передающиеся на наклеенные пьезоэлементы, а деформации сферического тела под действием скалярного акустического давления вызывают деформации наклеенных на сферическое тело пьезоэлементов (п. РФ №2546968 С1). Данный приемник выбран в качестве наиболее близкого аналога.
Однако, как и для всех векторных приемников инерционного типа, ему присущи все вышеперечисленные недостатки. Использование пьезоэлементов (из-за емкостного характера импеданса этих элементов) в качестве датчиков ограничивает частотный диапазон приемника снизу. Кроме этого, поскольку чувствительность данного приемника пропорциональна силам, которые воздействуют на сферическое тело со стороны акустического поля, для ее повышения необходимо увеличивать размеры тела, что влечет за собой увеличение габаритов, массы и стоимости всего устройства. Частичное заполнение сферического тела водой приводит к тому, что само тело должно обладать характеристиками прочности, позволяющими выдерживать гидростатическое давление, а с учетом ограничений, накладываемых требованиями чувствительности на минимальный размер сферического тела, данное обстоятельство ведет к неоправданному увеличению массы сферического тела при использовании приемника на больших глубинах.
К недостаткам описываемой конструкции следует также отнести необходимость иметь отдельную систему для измерения рабочей глубины приемника, с учетом того, что при практическом применении векторных приемников всегда необходимо знать глубину погружения приемника, например, для расчета акустического поля в точке приема.
Таким образом, стоит проблема расширения ассортимента комбинированных векторных приемников инерционного типа с улучшенными характеристиками.
Данная проблема решается комбинированным векторным приемником, сферическое тело которого с околонулевой плавучестью установлено в держателе с помощью упругих элементов и снабжено четырьмя плоскими зеркалами, расположенными по осям прямоугольной системы координат таким образом, что два из них расположены на одной оси по разным сторонам тела, а два других размещены каждое на одной из оставшихся осей, при этом держатель снабжен четырьмя лазерными интерферометрами с системой регистрации, основанной на подсчете интерференционных максимумов, и установленными таким образом, что зеркала являются отражателями их измерительных лучей.
В случае необходимости приемник может быть дополнительно оснащен охватывающей всю конструкцию гибкой звукопрозрачной оболочкой, заполненной водой.
Технический результат - расширение рабочего диапазона частот, повышение помехоустойчивости без потери чувствительности
Предлагаемая конструкция комбинированного векторного приемника за счет применения в качестве измерителя перемещений лазерного интерферометра с системой регистрации, основанной на подсчете интерференционных максимумов, и отсутствия у сферического тела внутренней структуры и малых размеров, приводит к смещению по частоте вверх таких явлений, как собственный резонанс сферического тела и дифракция акустических волн на сферическом теле, то есть к значительному расширению рабочего диапазона частот вверх, при этом поскольку используемая система измерений осуществляет регистрацию колебательного перемещения, а колебательную скорость получают путем дифференцирования выходных сигналов интерферометров, появляется возможность определить составляющую, пропорциональную текущей глубине погружения и одновременно достигается помехоустойчивость устройства без потери чувствительности.
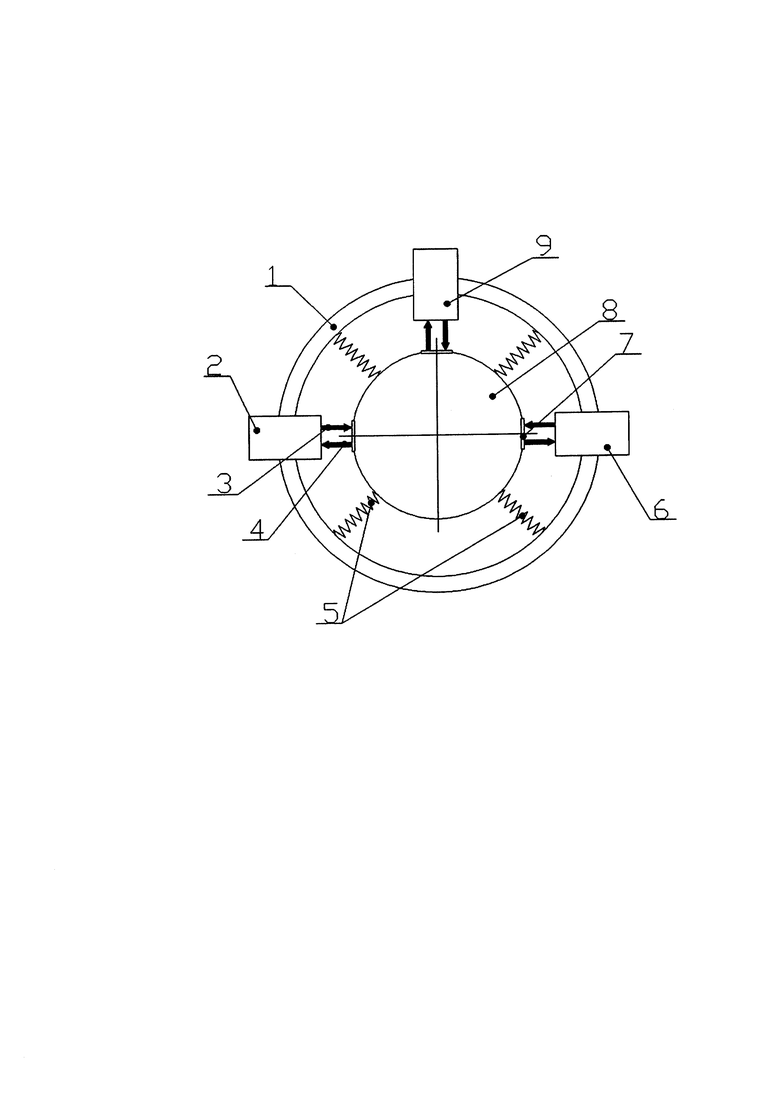
На Фиг. приведена схема заявляемого векторного приемника в плоскости координат X-Y, где 1 - держатель; 2 - интерферометр X1; 3 - измерительный луч интерферометра; 4 - отраженный луч интерферометра; 5 - упругие элементы подвеса, например, в виде пружин; 6 - интерферометр Х2; 7 - зеркало; 8 -сферическое тело; 9 - интерферометр Y.
Устройство работает следующим образом.
Когда приемник находится под водой в акустическом поле, сферическое тело 8, подвешенное в держателе 1 с помощью упругих элементов 5 и оснащенное зеркалами 7, соколеблется с окружающей средой. Отсутствие внутренней структуры у сферического тела позволяют выбрать существенно меньшие его размеры, то есть расширить частотный диапазон в сторону повышения рабочей частоты как за счет повышения собственной резонансной частоты сферического тела, так и за счет уменьшения длины волны, на которой начинается сказываться дифракция акустических волн на сферическом теле.
В качестве материала сферического тела может быть выбран, например, металл, при этом, размеры самого тела будут определятся рабочей глубиной погружения: гидростатическое давление явится в этом случае фактором, определяющим толщину стенки полого тела исходя из допускаемых напряжений сжатия для данного материала, чтобы обеспечить заданную среднюю плотность (например, близкую к плотности воды), а диаметр тела определится исходя из полученной средней плотности. В связи с отсутствием внутри тела каких-либо дополнительных масс, его размеры всегда будут меньше размеров корпуса любого приемника, содержащего такие массы (инерционная масса акселерометра, электронные блоки), при одинаковой прочности, определяемой рабочей глубиной погружения. Необходимо заметить, что некоторые пластики, например, полиметакрилат, имеют плотность, близкую к плотности воды, поэтому в случае применения таких пластиков сферическое тело может быть выполнено монолитным, при этом прочность пластика оказывается достаточной, чтобы выдержать любое гидростатическое давление, встречающееся в природе. Размеры сферического тела в этом случае могут быть выбраны еще меньше, по сравнению с металлическим вариантом.
Зеркала, расположенные на поверхности тела и являющимися отражателями измерительных лучей интерферометров, могут быть выполнены как плоские участки непосредственно на поверхности сферического тела при изготовлении самого тела, например, методами фрезерования и последующего шлифования и полирования, или иным способом, в зависимости от применяемого материала тела. Либо могут представлять собой плоские зеркала, установленные на поверхности тела.
Соколебания сферического тела сопровождаются изменениями расстояний между зеркальными поверхностями, имеющимися на сферическом теле, и интерферометрами X1, Х2, Y и Z (на фиг. интерферометр Z не показан), закрепленными на держателе 1. В связи с тем, что сферическое тело обладает упругими характеристиками, под действием переменного давления в акустическом поле, изменяется его радиальный размер, что также ведет к изменению расстояний между интерферометрами и зеркалами, установленными на сферическом теле. Измерения вышеназванных расстояний осуществляется лазерными интерферометрами, причем чувствительность интерферометров высока, а динамический диапазон не ограничен сверху за счет внутреннего устройства интерферометра. Таким образом, все интерферометры формируют на выходах сигнал, пропорциональный перемещениям зеркал, закрепленных на сферическом теле. Перемещения эти представляют собой сумму от колебательного движения сферического тела и деформации тела под действием давления в акустическом поле. Для разделения этих сигналов вдоль оси X установлено два интерферометра. Обозначим как Р величину мгновенной деформации сферического тела под действием давления в акустическом поле и будем считать величину Р положительной при деформации сжатия. Обозначим как Sx величину мгновенного перемещения сферического тела при соколебаниях с окружающей средой вдоль оси X и будем считать величину Sx положительной при смещении сферического тела влево. Присвоим сигналам интерферометров названия, совпадающие с названиями интерферометров. Тогда, при расположении интерферометров как показано на фиг., получим, что сигнал интерферометра X1 будет равен P-Sx, а сигнал интерферометра Х2 будет равен P+Sx. Суммируя сигналы интерферометров получим Х1+Х2=2Р. Вычитая сигналы интерферометров получим Х2-Х1=2Sx. Обозначая перемещения сферического тела вдоль осей Y и Z как Sy и Sz соответственно, получим Sy=Y-P, Sz=Z-P. Таким образом, получены сигналы пропорциональные компонентам вектора колебательного смещения сферического тела и пропорциональные давлению акустического поля. Дифференцируя сигналы, пропорциональные компонентам смещения сферического тела, получаем сигналы, пропорциональные компонентам вектора колебательной скорости.
Устройство интерферометра таково, что он осуществляет относительные измерения перемещений, при этом за нулевое перемещение принимается положение тел, существовавшее на момент начала работы интерферометра. Поэтому, если интерферометры включают при глубине погружения приемника, равной нулю, то после погружения приемника на рабочую глубину, сигнал Р будет иметь составляющую, пропорциональную текущей глубине погружения.
В случае необходимости исключить влияние температуры, изменения которой приведут к изменению расстояний между интерферометрами и зеркалами, можно установить в непосредственной близости от устройства температурный датчик, сигналы которого будут использованы для вычисления компенсирующей поправки.
Что касается применяемых интерферометров с системой регистрации, основанной на удержании максимума интерференционной картины с помощью схемы компенсации разности хода лучей с возможностью подсчета интерференционных максимумов, то они могут быть любого подходящего типа, например, интерферометр по схеме Майкельсона. В этом случае верхняя граница динамического диапазона определяется лишь емкостью счетчика интерференционных максимумов, которая может быть легко выполнена настолько большой, насколько это необходимо для получения динамического диапазона, и намного превышающей диапазон измеряемого параметра, реально встречающийся в природе. Таким образом, оказывается возможным измерить незначительные изменения, например, размера сферического тела под действием давления в акустическом поле, и в то же время измерять гораздо более существенные изменения этого же размера под действием гидростатического давления. То же самое касается и измерений малых перемещений сферического тела в процессе соколебаний с окружающей средой под действием акустического поля и существенно больших перемещений сферического тела под действием турбулентности в потоке движущейся жидкости, чем достигается помехоустойчивость без потери чувствительности.
В качестве источника когерентного излучения может быть использован лазер, подходящий по своим характеристикам, таким как габаритные размеры, стабильность частоты и энергопотребление, которые должны быть определены сообразно поставленным задачам при проектировании приемника, в частности можно использовать выпускаемые промышленностью в большом ассортименте полупроводниковые лазеры, отличающиеся малыми габаритами, например, типа cobolt DPL.
Таким образом, за счет применения соколеблющегося тела без внутренней структуры достигается уменьшение габаритов и, за счет этого, расширение частотного диапазона в область высоких частот; а за счет применения лазерных интерферометров с системами регистрации, использующих подсчет интерференционных максимумов, имеющих практически неограниченный динамический диапазон, достигается помехоустойчивость, расширение частотного диапазона в область низких частот (нижняя частота определяется временем наблюдения и для практического применения может быть принята равной нулю) и получение без дополнительного оборудования сигналов пропорциональных акустическому давлению и гидростатическому давлению, что позволяет определять глубину погружения приемника.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННЫЙ ВЕКТОРНЫЙ ПРИЕМНИК | 2019 |
|
RU2708184C1 |
| ЦИФРОВОЙ КОМБИНИРОВАННЫЙ ВЕКТОРНЫЙ ПРИЕМНИК С СИНТЕЗИРОВАННЫМИ КАНАЛАМИ | 2012 |
|
RU2509320C1 |
| Векторный автономный регистратор | 2023 |
|
RU2799973C1 |
| КОМБИНИРОВАННЫЙ ГИДРОАКУСТИЧЕСКИЙ ПРИЕМНИК | 2013 |
|
RU2546968C1 |
| КОМБИНИРОВАННЫЙ ВЕКТОРНЫЙ ПРИЕМНИК | 2018 |
|
RU2696812C1 |
| Комбинированный гидроакустический приёмник | 2024 |
|
RU2825562C1 |
| СКАНИРУЮЩЕЕ ИНТЕРФЕРЕНЦИОННОЕ УСТРОЙСТВО В ВИДЕ ДВУХЗЕРКАЛЬНОГО ИНТЕРФЕРОМЕТРА ФАБРИ-ПЕРО | 2013 |
|
RU2518366C1 |
| КОМБИНИРОВАННЫЙ ГИДРОАКУСТИЧЕСКИЙ ПРИЕМНИК | 2014 |
|
RU2577421C1 |
| ГЕОГИДРОФОН | 2003 |
|
RU2231088C1 |
| КОМБИНИРОВАННЫЙ ГИДРОАКУСТИЧЕСКИЙ ПРИЕМНИК | 2014 |
|
RU2569201C1 |
Изобретение относится к гидроакустике, а именно к комбинированным векторным приемникам и может быть использовано для проведения векторно-скалярных измерений параметров гидроакустических полей океана. Приемник включает сферическое тело с околонулевой плавучестью, установленное в держателе с помощью упругих элементов. По осям прямоугольной системы координат расположены четыре плоских зеркала, являющиеся отражателями измерительных лучей лазерных интерферометров, установленных на держателе. Два зеркала расположены на одной оси по разным сторонам сферического тела, а два других размещены каждое на одной из оставшихся осей. Технический результат заключается в расширении рабочего диапазона частот, повышении помехоустойчивости, а также возможности измерения глубины погружения приемника. 1 ил.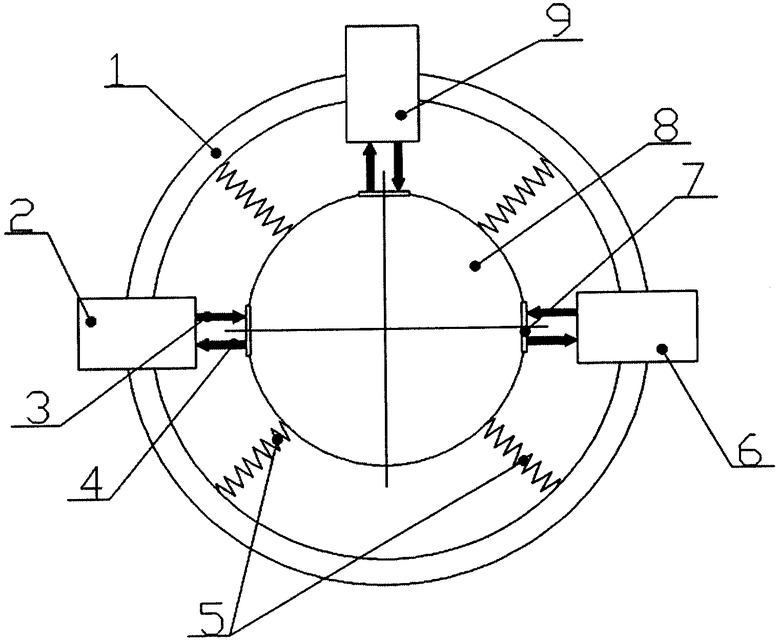
Комбинированный векторный приемник, сферическое тело которого с околонулевой плавучестью установлено в держателе с помощью упругих элементов и снабжено четырьмя плоскими зеркалами, расположенными по осям прямоугольной системы координат таким образом, что два из них расположены на одной оси по разным сторонам сферического тела, а два других размещены каждое на одной из оставшихся осей, при этом держатель снабжен четырьмя лазерными интерферометрами с системой регистрации, использующей подсчет интерференционных максимумов, и установленными таким образом, что зеркала являются отражателями их измерительных лучей.
| КОМБИНИРОВАННЫЙ ГИДРОАКУСТИЧЕСКИЙ ПРИЕМНИК ДЛЯ ГИБКОЙ ПРОТЯЖЕННОЙ БУКСИРУЕМОЙ АНТЕННЫ | 2012 |
|
RU2501043C1 |
| Лазерно-интерференционный измеритель градиента давления в жидкости | 2016 |
|
RU2625000C1 |
| 0 |
|
SU155509A1 | |
| US 2016054459 A1, 25.02.2016. | |||

