Изобретение относится к измерительной технике и гидроакустике и может быть использовано для измерения акустических полей океана.
Комбинированные гидроакустические приемники (КГП) известны и широко используются в гидроакустике. Приемники включают канал акустического давления и три ортогональных канала для определения вектора колебательной скорости. Приемники снабжены системами электропитания и передачи информации. Кроме этого, приемник снабжают системой, удерживающей его в определенном положении. КГП позволяют получать дополнительную информацию о гидроакустических полях за счет того, что они определяют не только скалярное давление в поле акустической волны, но и вектор колебательной скорости. Такой подход, помимо определения направления прихода акустических колебаний в рабочем диапазоне частот, позволяет рассчитывать характеристики потока мощности, за счет чего может быть получено преимущество при пеленговании шумов в изотропном поле шумов моря. Основными проблемами, ухудшающими характеристики приемников, являются вибрационные помехи, возникающие по разным причинам и передающиеся на корпус приемника за счет механической связи между приемником и элементами подвеса и наличия кабелей (кабеля) для подвода электропитания и/или вывода полезной информации. По этим же причинам за счет проникновения акустических колебаний на корпус приемника опять же через элементы подвеса и подводящие кабели происходит искажение характеристики направленности. Кроме этого, возникают сложности обеспечения настолько низкой резонансной частоты упругого подвеса, чтобы она оказывалась за пределами рабочего диапазона. Следует отметить, что многие задачи гидроакустики требуют расширения рабочего диапазона, что осуществляют за счет снижения минимальной рабочей частоты, что связано как с условиями распространения звука в океане, так и с особенностями объектов, этот звук излучающих и являющихся предметом исследования.
Известны комбинированные приемники, в которых для уменьшения воздействия на приемник вибраций используют системы, удерживающие приемник в определенном положении с использованием эластичных нитей. Например, предлагается КГП, в котором используют двузвенную подвесную систему, при которой комбинированный приемник устанавливается в звукопрозрачной рамке, которая в свою очередь присоединена к корпусу через натяжитель, к которому посредством ограничительной нити крепится и комбинированный приемник. Крепление осуществляют посредством лонжей, изготовленных из эластичной и ограничительной нитей, например, из резиновых и кевларовых нитей (п. РФ №106880).
Для улучшения характеристик направленности приемника предлагается поместить корпус приемника в полупроницаемый для водной среды звукопрозрачный каркас, что приводит к снижению скорости обтекания приемника и повышению точности измерений, при этом за счет применения арретиров с эластичными опорами и системы эластичных нитей регулируемой длины, закрепляемых одним концом на корпусе приемника, а вторым концом на жестком каркасе, приемник оказывается защищенным от последствий воздействия больших ускорений, возникающих в процессе эксплуатации (п. РФ №128343).
Упругие элементы систем подвеса гидроакустических приемников, соединяющие корпус приемника и защитное ограждение, имеют вполне определенную жесткость, которая определяет резонансную частоту такого подвеса. Возникают трудности, связанные с учетом влияния этого резонанса на характеристики чувствительности и направленности самого приемника, поэтому стремятся вывести частоту резонанса за пределы рабочего диапазона приемника. В то же время для ряда задач гидроакустики важно осуществлять прием в как можно более низкочастотной области (единицы герц). При этом, для снижения резонансной частоты подвеса приходится снижать жесткость упругих элементов, что, в свою очередь, приводит либо к уменьшению поперечного сечения упругих элементов, либо к увеличению их длины. Снижение поперечного сечения ведет к снижению прочности и имеет предел, определяемый надежностью упругого элемента, а увеличение длины ведет к увеличению габаритов приемного устройства, что всегда нежелательно. С другой стороны, в зависимости от гидрологических условий в точке размещения приемника (имеется в виду скорость обтекания при наличии течения) необходимо обеспечить жесткость подвеса, которая бы препятствовала перемещению приемника, вызывающему касание корпусом приемника элементов ограждения. С учетом этого обстоятельства разработчики вынуждены устанавливать подвес с жесткостью, которая в ряде случаев оказывается избыточно большой, например, если скорость обтекания по каким-либо причинам уменьшается.
Наиболее близким к заявляемому является КГП, включающий корпус с системами приема акустических колебаний, электропитания и передачи информации, и систему стабилизации корпуса. Система приема акустических колебаний содержит установленный в центре корпуса груз, гидрофонный канал, три векторных канала, установленных центрально-симметрично между корпусом и грузом таким образом, что оси чувствительностей каждого из векторных каналов образуют декартову систему координат. Система стабилизации корпуса представляет собой соединенную с корпусом полую державку, внутри которой расположены кабели электропитания и линия связи для передачи информации (п. РФ №89794 U1).
Однако непосредственное крепление державки к корпусу приемника приводит к искажению движения корпуса приемника в поле акустической волны, кроме того, вибрации, возникающие на конструктивных элементах, с которыми механически связана державка, под воздействием течений в окружающей среде передаются посредством державки непосредственно на КГП, создавая помехи приему. Наличие имеющих определенную жесткость кабелей, с помощью которых приемник подключается к потребителю информации, также искажает работу упругого подвеса и является элементом, передающим звуковые колебания окружающей среды на корпус приемника независимо от его ориентации относительно фронта акустической волны, что искажает характеристику направленности.
Задача, решаемая изобретением, - улучшение рабочих характеристик комбинированного приемника за счет устранения искажений движения корпуса в поле акустической волны и снижения уровня вибрационных помех.
Поставленная задача решается предлагаемой конструкцией КГП, включающего корпус с грузом, расположенным в центре корпуса, гидрофонный канал, три векторных канала, установленных центрально-симметрично между корпусом и грузом, электронный блок преобразования акустических колебаний, систему стабилизации корпуса, системы электропитания и передачи информации, при этом система стабилизации корпуса выполнена неконтактной и включает жесткий каркас, по периметру которого размещены датчики положения корпуса и соединенные с электронной системой регулирования тока электромагниты, напротив которых внутри корпуса установлены постоянные магниты, а системы электропитания и передачи информации выполнены дистанционными, при этом система электропитания состоит из передающей части, расположенной на каркасе в непосредственной близости от корпуса и включающей или колебательный контур, или катушку с магнитопроводом, и приемной части, включающей или настроенный на частоту колебательного контура передающей части колебательный контур, или катушку с магнитопроводом, отделенным от магнитопровода передающей части зазором, обеспечивающим возможность колебательного движения корпуса, а система передачи информации включает передающую часть, размещенную в корпусе и соединенную с электронным блоком преобразования акустических колебаний, и соответствующую ей приемную часть, установленную на каркасе и соединенную с блоком преобразования полученных сигналов, хранения и/или передачи информации.
Техническим результатом комбинированного гидроакустического приемника является улучшение формы характеристики направленности, снижение порогового уровня, позволяющее расширить возможности приемника при обнаружении слабых сигналов, возможность оперативного регулирования резонансной частоты подвеса, расширение частотного диапазона приемника в область низких частот.
На чертеже представлена схема предлагаемого приемника, где 1 - жесткий каркас; 2 - корпус; система приема акустических колебаний, где 3 - груз, 4 - чувствительные элементы, 5 - электронный блок преобразования акустических колебаний; система дистанционной передачи информации, где 6 - передающая часть, 7 - приемная часть, 8 - электронная система преобразования сигналов и хранения или передачи полученной информации; система дистанционной подачи электропитания для компонентов внутри корпуса состоит из двух частей и включает приемную часть, состоящую из катушки с конденсатором 9 и блока преобразования 10, и передающую часть, состоящую, в свою очередь, из катушки с конденсатором 11, генератора 12, связанного с источником энергии, например аккумулятором (не показан); система стабилизации положения корпуса состоит из датчиков положения 13, постоянных магнитов 14, размещенных внутри корпуса 2, электромагнитов 15, размещенных на наружном каркасе 1, и электронной системы 16, регулирующей протекающий в электромагнитах ток.
При воздействии акустической волны на корпус приемника он начинает соколебаться с частицами среды. Для обеспечения возможности осуществлять колебательное движение вместе с окружающей средой корпус 2 снабжен неконтактной системой стабилизации положения корпуса и дистанционными системами энергоснабжения и передачи/хранения информации. Для этого в корпусе 2 установлены постоянные магниты 14, напротив которых на каркасе 1 размещены управляемые электронной системой 16 электромагниты 15, и датчики положения 13, которые вырабатывают сигналы, пропорциональные положению корпуса 2 относительно датчиков 13. Они могут быть реализованы, например, акустическими датчиками расстояния или датчиками Холла, которые вырабатывают сигналы в зависимости от силы магнитного поля, возникающего из-за наличия в корпусе постоянных магнитов и меняющегося при изменении положения корпуса относительно датчиков. Электронная система 16 управляет протекающим по электромагнитам током таким образом, чтобы сигналы от всех датчиков положения 13 были одинаковы, такой алгоритм обеспечивает стабилизацию положения корпуса в определенной точке пространства внутри каркаса. Изменяя характеристики электронной системы 16, можно изменить жесткость подвеса, а значит и резонансную частоту подвеса, которая может быть дополнительно снижена при наличии благоприятных условий окружающей среды (например, отсутствие течений) и оперативно увеличена при ухудшении внешних условий (например, возрастание скорости обтекания). Такой подход позволяет при установке величины жесткости ориентироваться не на самые худшие из возможных в эксплуатации условий, а адаптировать приемник к условиям, имеющим место в настоящий момент времени, что позволит, в некоторых случаях, понизить резонансную частоту и расширить частотный диапазон работы приемника.
Акустические колебания среды, преобразованные в электронном блоке 5, поступают в передающую часть 6 дистанционной системы передачи информации, расположенной в корпусе 2, и затем в размещенную на каркасе 1 приемную часть 7, соединенную с электронной системой 8, обеспечивающей преобразование сигналов и их последующее хранение. Система дистанционной передачи информации может быть реализована любыми приемлемыми способами, например, передающая часть дистанционной системы передачи информации может представлять собой либо светоизлучающее устройство (светодиод), свет которого тем или иным способом модулирован принятыми акустическими колебаниями, либо излучающее в радиодиапазоне устройство, излучение которого также модулировано принятыми акустическими колебаниями, либо устройство, генерирующее магнитное поле (катушку), модулированное принятыми акустическими колебаниями, а приемная часть может представлять собой, соответственно, либо светоприемное устройство (фотодиод), либо радиоприемное устройство, либо устройство, чувствительное к переменному магнитному полю (катушку). Количество датчиков положения и электромагнитов, как правило, составляет не менее четырех.
Работу перечисленных устройств, размещенных в корпусе, обеспечивает система дистанционного электропитания, основанная на принципе передачи электромагнитной энергии в пространстве, и может быть реализована любым из двух способов, или путем передачи энергии электромагнитной волны между двумя близко расположенными колебательными контурами, образуемыми катушкой и конденсатором и настроенными на одинаковую резонансную частоту, или путем передачи энергии за счет магнитного поля, передающегося через зазор между магнитопроводами передающей и приемной частями системы дистанционного электропитания.
Техническое выполнение системы приема акустических колебаний является стандартным и может быть выполнено различными путями, например, используя трехосный акселерометр, с чувствительными элементами на основе пьезокерамики, или трехосный датчик скорости с чувствительными элементами в виде катушек с током, колеблющихся в магнитом поле.
Таким образом, предлагаемая конструкция комбинированного гидроакустического приемника, в которой корпус приемника помещен в жесткий каркас с дистанционными системами передачи информации и подачи электропитания и неконтактной системой подвеса, позволяет устранить передачу вибраций каркаса и кабельных линий на корпус и искажение движения корпуса приемника в поле акустической волны, за счет чего улучшается форма характеристики направленности, и появляется возможность управления резонансной частотой подвеса приемника, за счет чего можно расширить рабочий частотный диапазон.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комбинированный гидроакустический приёмник | 2024 |
|
RU2825562C1 |
| Векторный автономный регистратор | 2023 |
|
RU2799973C1 |
| КОМБИНИРОВАННЫЙ ВЕКТОРНЫЙ ПРИЕМНИК | 2018 |
|
RU2696812C1 |
| Способ определения координат, диаграмм направленности и акустической мощности зон излучения на корпусе движущегося шумящего объекта | 2022 |
|
RU2799388C1 |
| Способ исследования структуры первичных гидроакустических полей шумящего объекта | 2022 |
|
RU2787312C1 |
| КОМБИНИРОВАННЫЙ ГИДРОАКУСТИЧЕСКИЙ ПРИЕМНИК | 2014 |
|
RU2569201C1 |
| ЛАЗЕРНО-ИНТЕРФЕРЕНЦИОННЫЙ ВЕКТОРНЫЙ ПРИЕМНИК | 2019 |
|
RU2699926C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ И РЕГИСТРАЦИИ ГИДРОАКУСТИЧЕСКИХ И ГИДРОДИНАМИЧЕСКИХ ВОЗДЕЙСТВИЙ | 2015 |
|
RU2587523C1 |
| Самовсплывающая портативная донная сейсмическая станция без оставления груза на дне моря | 2022 |
|
RU2796944C1 |
| Способ разведки ледовой обстановки с использованием дистанционно управляемых беспилотных летательных аппаратов и устройство для его осуществления | 2021 |
|
RU2778158C1 |
Использование: изобретение относится измерительной технике и гидроакустике и может быть использовано для проведения векторно-скалярных измерений параметров гидроакустических полей океана. Сущность: комбинированный гидроакустический приемник включает корпус приемника с расположенным в центре грузом, гидрофонный канал, три векторных канала, установленных центрально-симметрично между корпусом и грузом, электронный блок преобразования акустических колебаний, дистанционные системы электропитания и передачи информации, а также неконтактную магнитную систему стабилизации корпуса приемника, состоящую из жесткого каркаса, по периметру которого размещены датчики положения корпуса и соединенные с электронной системой регулирования тока электромагниты, напротив которых внутри корпуса установлены постоянные магниты. Технический результат: улучшение формы характеристики направленности, снижение порогового уровня, позволяющее расширить возможности приемника при обнаружении слабых сигналов, возможность оперативного регулирования резонансной частоты подвеса, расширение частотного диапазона приемника в область низких частот. 1 з.п. ф-лы, 1 ил.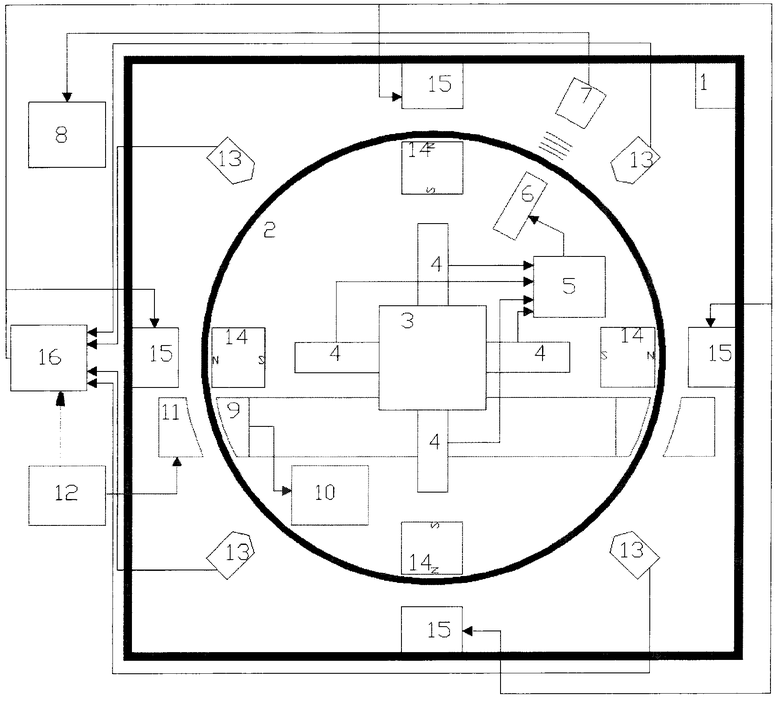
1. Комбинированный гидроакустический приемник, включающий корпус с грузом, расположенным в центре корпуса, гидрофонный канал, три векторных канала, установленных центрально-симметрично между корпусом и грузом, электронный блок преобразования акустических колебаний, систему стабилизации корпуса, снабженную системами электропитания и передачи информации, отличающийся тем, что система стабилизации корпуса выполнена неконтактной и включает жесткий каркас, по периметру которого размещены датчики положения корпуса и соединенные с электронной системой регулирования тока электромагниты, напротив которых внутри корпуса установлены постоянные магниты, а системы электропитания и передачи информации выполнены дистанционными, при этом система передачи информации включает передающую часть, размещенную в корпусе и соединенную с электронным блоком преобразования акустических колебаний, и соответствующую ей приемную часть, установленную на каркасе и соединенную с блоком преобразования полученных сигналов, хранения и/или передачи информации, размещенным на каркасе, а система электропитания состоит из передающей части, расположенной на каркасе в непосредственной близости от корпуса и включающей или колебательный контур, или катушку с магнитопроводом, и приемной части, включающей, соответственно, или настроенный на частоту колебательного контура передающей части колебательный контур, или катушку с магнитопроводом, отделенным от магнитопровода передающей части зазором, обеспечивающим возможность колебательного движения корпуса.
2. Комбинированный гидроакустический приемник по п. 1, отличающийся тем, что в качестве датчиков положения корпуса приемника установлены датчики Холла.
| Высевающий аппарат квадратно-гнездовых сеялок | 1959 |
|
SU125425A1 |
| Способ получения сополимеров путем совместной полимеризации | 1949 |
|
SU89794A1 |
| ЦИФРОВОЙ КОМБИНИРОВАННЫЙ ВЕКТОРНЫЙ ПРИЕМНИК С СИНТЕЗИРОВАННЫМИ КАНАЛАМИ | 2012 |
|
RU2509320C1 |
| CN101319932 A, 10.12.2008 | |||
| US2006239122 A1, 26.10.2006 | |||
| ГИДРОАКУСТИЧЕСКИЙ КОМПЛЕКС ДЛЯ ИЗМЕРЕНИЯ АЗИМУТАЛЬНОГО УГЛА И ГОРИЗОНТА ИСТОЧНИКА ЗВУКА В МЕЛКОМ МОРЕ | 2011 |
|
RU2476899C1 |

