Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу управления глушением двигателя на холостом ходу и к устройству управления глушением двигателя на холостом ходу.
Уровень техники
[0002] В качестве технологии уведомления водителя относительно состояния управления глушением двигателя на холостом ходу, которое является синонимом для снижения числа оборотов в режиме холостого хода и глушения двигателя в режиме холостого хода, для автоматической остановки двигателя, например, предусмотрена конфигурация, раскрытая в PTL 1.
В технологии, раскрытой в PTL 1, двигатель автоматически останавливается в состоянии, в котором транспортное средство останавливается, когда переключатель зажигания находится во включенном состоянии, и дополнительно водитель нажимает педаль тормоза. Впоследствии, когда выбирается диапазон нейтрали, состояние остановки двигателя продолжается в состоянии, в котором операция нажатия педали тормоза отменена (педаль тормоза не нажимается).
Список библиографических ссылок
Патентные документы
[0003] PTL 1. JP 2012-087730 А
Сущность изобретения
Техническая задача
[0004] Тем не менее, в технологии PTL 1, как описано выше, состояние остановки двигателя продолжается, когда переключатель зажигания находится во включенном состоянии, так что возможно то, что водитель в качестве отмены операции нажатия педали тормоза неправильно понимает то, что состояние переключателя зажигания является выключенным. Таким образом, есть опасность того, что водитель, неправильного понимающий то, что состояние переключателя зажигания является выключенным, выходит из транспортного средства, в котором двигатель временно останавливается.
Настоящее изобретение осуществлено с учетом проблемы, описанной выше, и задача настоящего изобретения заключается в том, чтобы предоставлять способ управления глушением двигателя на холостом ходу и устройство управления глушением двигателя на холостом ходу, допускающие запрет выхода водителя из транспортного средства, в котором состояние переключателя зажигания является включенным.
Решение задачи
[0005] Чтобы решать вышеуказанную задачу, в одном аспекте настоящего изобретения, когда разрешение, заданное заранее, удовлетворяется в состоянии, в котором управление поддержанием остановки транспортного средства для того, чтобы формировать тормозную силу, допускающую поддержание состояния, в котором состояние остановки транспортного средства даже когда из состояния, в котором транспортное средство остановлено посредством операции нажатия тормоза водителем, водитель уменьшает операцию нажатия тормоза, двигатель транспортного средства автоматически останавливается. Помимо этого, когда парковочный тормоз нажимается в то время, когда двигатель автоматически остановлен, водителю уведомляется информация зажигания для указания того, что состояние переключателя зажигания является включенным.
Условие разрешения включает в себя условие, при котором состояние операции нажатия тормоза водителем представляет собой первое рабочее состояние тормоза, заданное заранее. Кроме того, рабочее условие для того, чтобы выполнять управление поддержанием остановки транспортного средства, включает в себя условие, при котором состояние операции нажатия тормоза водителем представляет собой второе рабочее состояние тормоза, заданное заранее. Дополнительно, рабочая величина операции нажатия тормоза водителем, включенная в первое рабочее состояние тормоза, превышает рабочую величину, включенную во второе рабочее состояние тормоза.
Преимущества изобретения
[0006] Согласно одному аспекту настоящего изобретения, после того, как двигатель автоматически останавливается, и в момент времени, когда парковочный тормоз нажимается, информация зажигания уведомляется водителю транспортного средства.
В силу этого, появляется возможность уведомлять водителя относительно информации зажигания после выполнения операции нажатия парковочного тормоза, которая представляет собой операцию, которая выполняется с большой вероятностью в момент времени, когда водитель выходит из транспортного средства. Таким образом, появляется возможность предоставлять способ управления глушением двигателя на холостом ходу и устройство управления глушением двигателя на холостом ходу, допускающие запрет выхода водителя из транспортного средства, в котором состояние переключателя зажигания является включенным.
Краткое описание чертежей
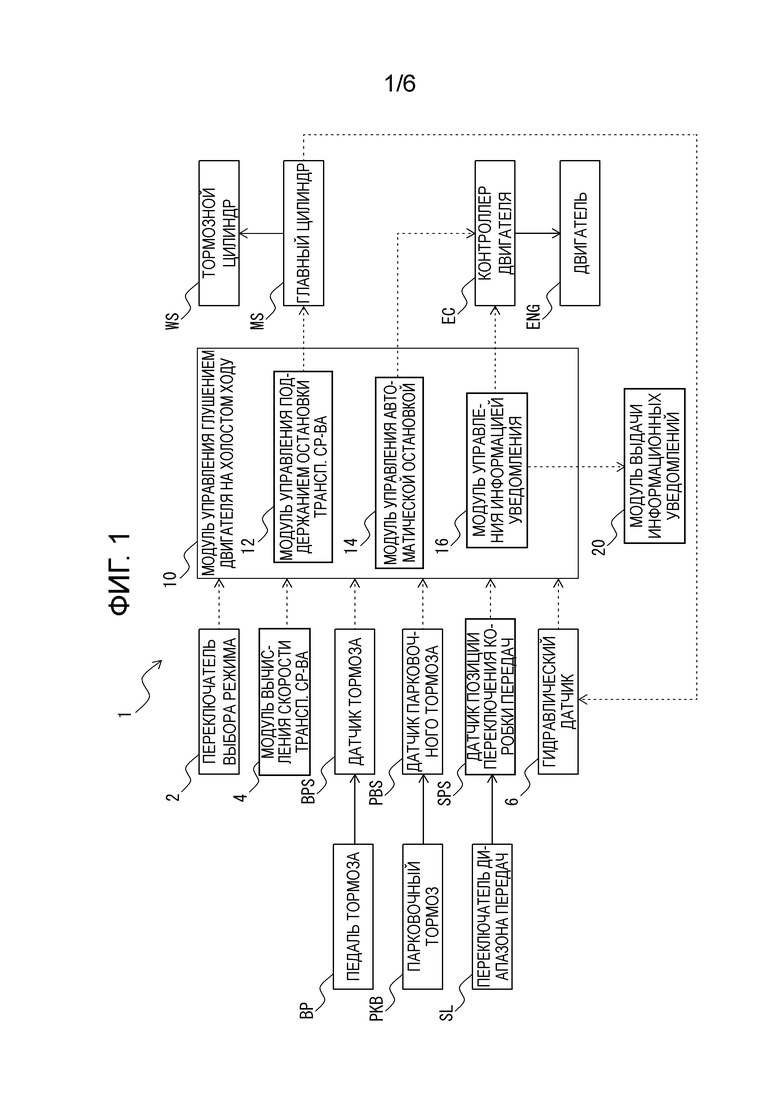
[0007] Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию устройства управления глушением двигателя на холостом ходу согласно первому варианту осуществления настоящего изобретения;
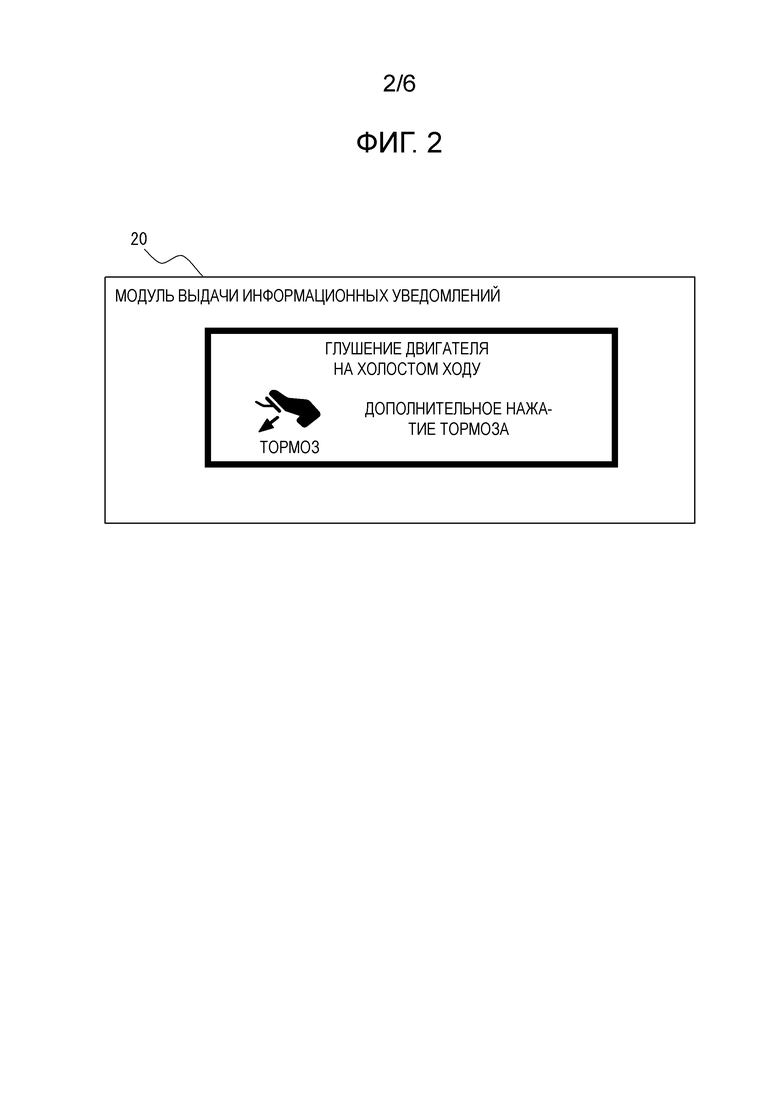
Фиг. 2 является схемой, иллюстрирующей состояние, в котором информация помощи загорается на устройстве отображения;
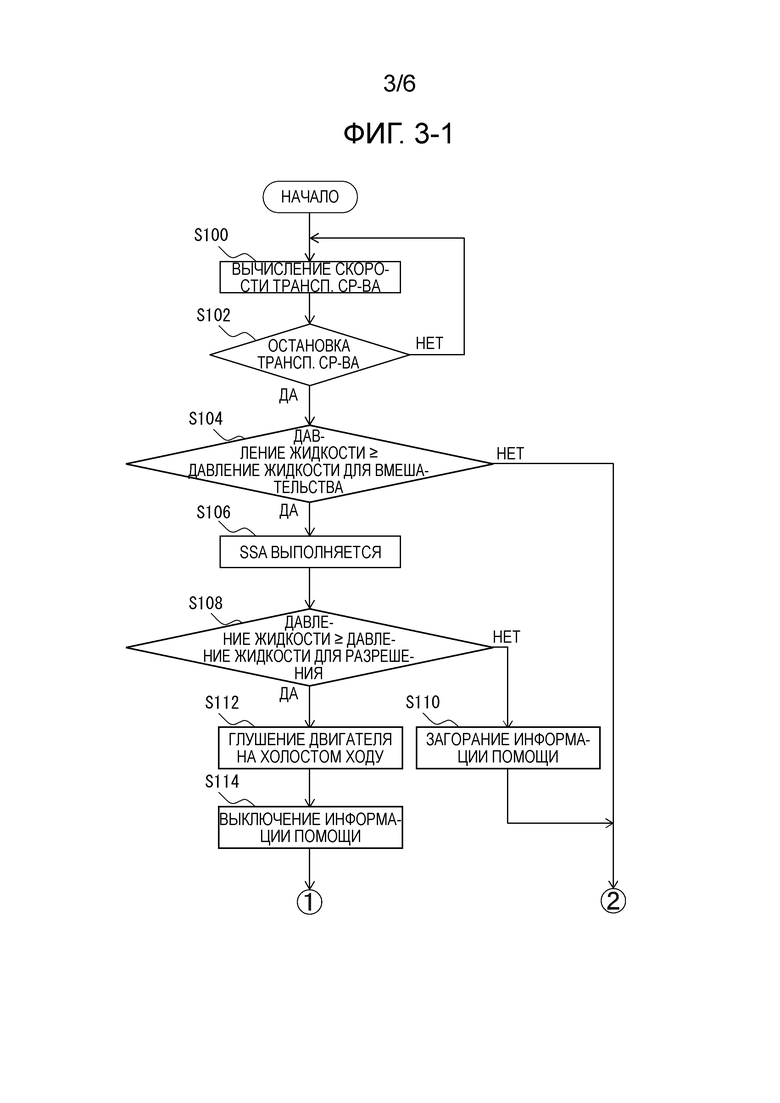
Фиг. 3-1 является блок-схемой последовательности операций способа, иллюстрирующей процесс, выполняемый посредством устройства управления глушением двигателя на холостом ходу согласно первому варианту осуществления настоящего изобретения;
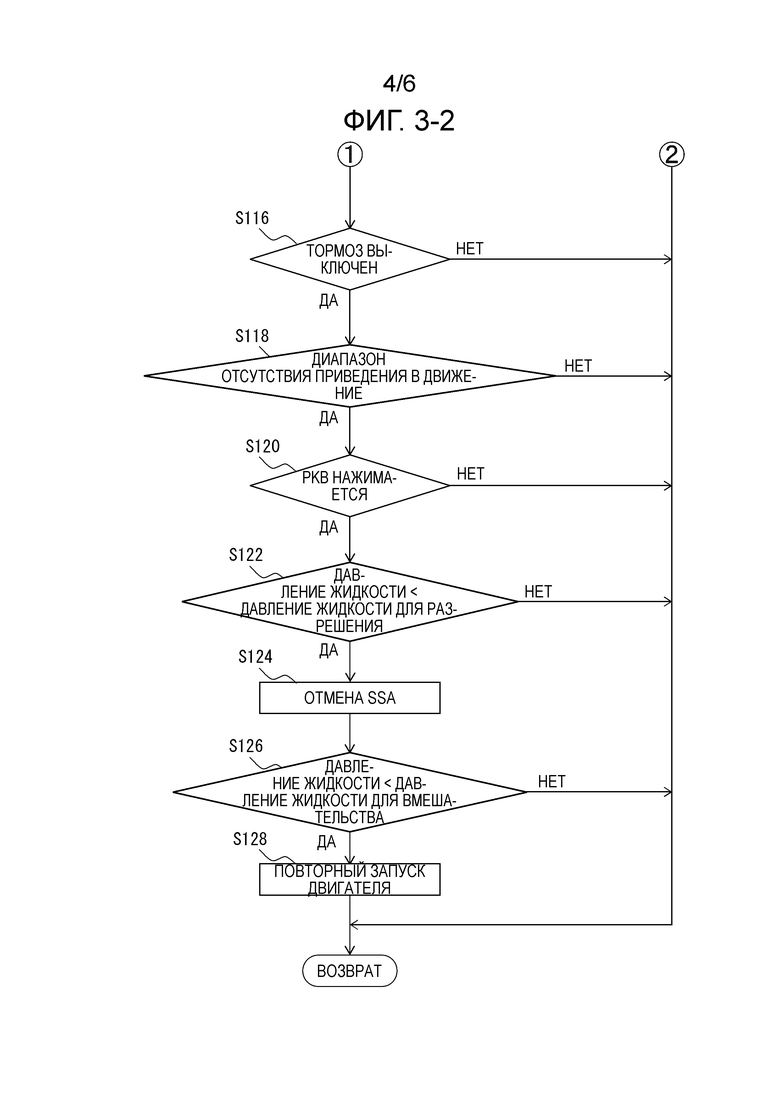
Фиг. 3-2 является блок-схемой последовательности операций способа, иллюстрирующей процесс, выполняемый посредством устройства управления глушением двигателя на холостом ходу согласно первому варианту осуществления настоящего изобретения;
Фиг. 4 является временной диаграммой, иллюстрирующей работу транспортного средства, которая выполняется посредством конфигурации, в которой используется устройство управления глушением двигателя на холостом ходу согласно первому варианту осуществления настоящего изобретения; и
Фиг. 5 является схемой, иллюстрирующей пример модификации первого варианта осуществления настоящего изобретения.
Подробное описание вариантов осуществления
[0008] В нижеприведенном подробном описании, описываются конкретные подробности таким образом, чтобы предоставлять полное понимание вариантов осуществления настоящего изобретения. Тем не менее, должно становиться очевидным, что один или более вариантов осуществления могут выполняться даже при отсутствии таких конкретных подробностей. Помимо этого, известные структуры и устройства иногда схематично иллюстрируются для того, чтобы упрощать чертежи.
Первый вариант осуществления
[0009] Далее описывается первый вариант осуществления настоящего изобретения со ссылкой на чертежи.
Конфигурация устройства управления глушением двигателя на холостом ходу
Со ссылкой на фиг. 1 и 2, ниже описывается конфигурация устройства 1 управления глушением двигателя на холостом ходу согласно первому варианту осуществления.
Как проиллюстрировано на фиг. 1, устройство 1 управления глушением двигателя на холостом ходу включает в себя модуль 10 управления глушением двигателя на холостом ходу и модуль 20 выдачи информационных уведомлений.
Модуль 10 управления глушением двигателя на холостом ходу сконфигурирован, например, посредством микрокомпьютера и смонтирован на транспортном средстве, содержащем устройство 1 управления глушением двигателя на холостом ходу (называется "транспортным средством" в нижеприведенном описании).
Следует отметить, что микрокомпьютер представляет собой конфигурацию, включающую в себя, например, центральный процессор (CPU), оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM) и т.п.
Дополнительно, модуль 10 управления глушением двигателя на холостом ходу принимает ввод информационного сигнала из переключателя 2 выбора режима, модуля 4 вычисления скорости транспортного средства, датчика BPS тормоза, датчика PBS парковочного тормоза, датчика SPS позиции переключения коробки передач и гидравлического датчика 6.
[0010] Переключатель 2 выбора режима представляет собой переключатель для выбора того, следует или нет выполнять управление поддержанием остановки транспортного средства (также называется "помощью при стоянии на месте (SSA)").
Управление поддержанием остановки транспортного средства представляет собой управление для того, чтобы формировать тормозную силу, допускающую поддержание состояния, в котором транспортное средство остановлено (состояние остановки транспортного средства), даже когда из состояния, в котором транспортное средство остановлено посредством операции нажатия педали BP тормоза водителем, водитель уменьшает рабочую величину нажатия педали BP тормоза.
Другими словами, управление поддержанием остановки транспортного средства представляет собой управление для того, чтобы формировать тормозную силу, допускающую поддержание состояния остановки транспортного средства, даже когда уменьшается операция нажатия педали тормоза.
В первом варианте осуществления, в качестве примера, описывается случай, в котором управление поддержанием остановки транспортного средства представляет собой управление для того, чтобы формировать тормозную силу, допускающую поддержание состояния остановки транспортного средства, даже если из состояния, в котором транспортное средство остановлено посредством операции нажатия педали BP тормоза водителем, водитель отменяет операцию нажатия педали BP тормоза.
[0011] Другими словами, управление поддержанием остановки транспортного средства представляет собой управление для того, чтобы формировать тормозную силу, допускающую поддержание состояния остановки транспортного средства посредством управления, которое автоматически выполняется на стороне транспортного средства независимо от операции нажатия педали BP тормоза, которая выполняется водителем.
Следует отметить, что "отмена операции нажатия педали BP тормоза" является аналогичной по смыслу конфигурированию степени открытия педали BP тормоза таким образом, что она равна 0 [°].
Дополнительно, из переключателя 2 выбора режима, информационный сигнал, содержащий результат выбора управления поддержанием остановки транспортного средства (иногда называется "сигналом выбора управления" в нижеприведенном описании), выводится в модуль 10 управления глушением двигателя на холостом ходу.
[0012] Модуль 4 вычисления скорости транспортного средства принимает, из датчика скорости вращения колес (не проиллюстрирован), ввод сигнала скорости вращения колес, содержащего скорость вращения колеса, предоставленного в транспортном средстве. Затем модуль 4 вычисления скорости транспортного средства вычисляет скорость движения транспортного средства (иногда называется "скоростью транспортного средства" в нижеприведенном описании) с использованием скорости вращения, содержащейся в сигнале скорости вращения колес. Помимо этого, модуль 4 вычисления скорости транспортного средства выводит информационный сигнал, содержащий вычисленную скорость транспортного средства (иногда называется "сигналом скорости транспортного средства" в нижеприведенном описании), в модуль 10 управления глушением двигателя на холостом ходу.
Следует отметить, что модуль 4 вычисления скорости транспортного средства также может иметь конфигурацию, например, предоставленную в известной системе динамического управления транспортного средства (VDC).
[0013] Датчик скорости вращения колес монтируется на транспортном средстве. Дополнительно, датчик скорости вращения колес обеспечивает возможность формирования предварительно сконфигурированного числа импульсов скорости вращения колес в расчете на вращение колеса, предоставленного в транспортном средстве.
Датчик BPS тормоза представляет собой датчик, который обнаруживает рабочую величину (рабочую величину нажатия) педали BP тормоза водителем.
Педаль BP тормоза представляет собой педаль, которую водитель транспортного средства нажимает только в соответствии с потребностью в тормозной силе.
Дополнительно, датчик BPS тормоза выводит информационный сигнал, содержащий рабочую величину нажатия педали BP тормоза водителем, в модуль 10 управления глушением двигателя на холостом ходу.
[0014] Следует отметить, что датчик BPS тормоза формируется, например, с использованием датчика хода педали. Дополнительно, конфигурация датчика BPS тормоза не должна ограничиваться конфигурацией, задаваемой с использованием датчика хода педали, но, например, также может представлять собой конфигурацию, чтобы определять давление главного цилиндра MS (давление в главном цилиндре) посредством операции нажатия водителем.
Другими словами, датчик BPS тормоза представляет собой датчик, который обнаруживает рабочую величину (операцию нажатия педали тормоза) нажатия педали BP тормоза водителем.
Датчик PBS парковочного тормоза выводит информационный сигнал, содержащий рабочее состояние парковочного тормоза PKB, в модуль 10 управления глушением двигателя на холостом ходу.
Парковочный тормоз PKB нажимается, или его нажатие отменяется посредством операции нажатия рычага, кнопки и т.п. водителем. Дополнительно, когда парковочный тормоз PKB нажимается, колесо и карданный вал (не проиллюстрирован) стопорятся.
[0015] В первом варианте осуществления, в качестве примера, описывается случай, в котором конфигурация парковочного тормоза PKB представляет собой электрический парковочный тормоз (ePKB), имеющий конфигурацию, в которой электрический актуатор, такой как электромотор, приводится в действие, за счет этого стопоря колесо и карданный вал.
Следует отметить, что конфигурация парковочного тормоза PKB не должна ограничиваться электрическим парковочным тормозом, но также может представлять собой конфигурацию, в которой операция нажатия рычага, педали и т.п. водителем передается таким образом, чтобы стопорить колесо и карданный вал.
Датчик SPS позиции переключения коробки передач обнаруживает диапазон (позицию переключения коробки передач), выбранный посредством операции нажатия переключателя SL диапазона передач водителем. Дополнительно, датчик SPS позиции переключения коробки передач выводит информационный сигнал, содержащий обнаруженный диапазон, в модуль 10 управления глушением двигателя на холостом ходу.
Переключатель SL диапазона передач включает в себя рычаг, кнопку и т.п., которая нажимается водителем. Дополнительно, переключатель SL диапазона передач нажимается водителем, за счет чего выбирается диапазон.
[0016] Диапазон, который выбирается посредством переключателя SL диапазона передач, включает в себя диапазон приведения в движение и диапазон отсутствия приведения в движение.
Диапазон приведения в движение представляет собой диапазон, выбранный, когда транспортное средство движется, и включает в себя диапазон заднего хода (R-диапазон), выбранный во время заднего хода, и многоступенчатый диапазон переднего хода (D-диапазон, L-диапазон, 2-диапазон и т.п.), выбранный во время переднего хода.
Диапазон отсутствия приведения в движение представляет собой диапазон, выбранный, когда транспортное средство остановлено, и включает в себя диапазон парковки (P-диапазон), в котором трансмиссия стопорится, и диапазон нейтрали (N-диапазон), в котором тракт передачи движущей силы из двигателя ENG на колесо прерывается.
Гидравлический датчик 6 определяет давление жидкости тормозной жидкости, которая подается из главного цилиндра MS в гидравлическую систему (например, сдвоенную систему, состоящую из первичной системы и вторичной системы), в которой перемещается тормозная жидкость. Затем гидравлический датчик 6 выводит информационный сигнал, содержащий определенное давление жидкости (иногда называется "сигналом давления жидкости" в нижеприведенном описании), в модуль 10 управления глушением двигателя на холостом ходу.
[0017] Модуль 20 выдачи информационных уведомлений формируется, например, с использованием устройства отображения (индикатора), расположенного на панели датчиков и индикаторов. Следует отметить, что панель датчиков и индикаторов предоставляется на приборной панели водительского сиденья.
Дополнительно, модуль 20 выдачи информационных уведомлений обеспечивает загорание информации помощи, как проиллюстрировано на фиг. 2, на устройстве отображения, расположенном на панели датчиков и индикаторов, либо выключает информацию помощи в соответствии с информационным сигналом, вводимым из модуля 10 управления глушением двигателя на холостом ходу.
Информация помощи представляет собой информацию, требуемую для того, чтобы удовлетворять условию разрешения для выполнения автоматической остановки (аналогичной по смыслу глушению двигателя на холостом ходу, снижению числа оборотов в режиме холостого хода и глушению двигателя в режиме холостого хода) двигателя в состоянии, в котором управление поддержанием остановки транспортного средства выполняется. Другими словами, информация помощи представляет собой информацию для удовлетворения условия разрешения.
Следует отметить, что "состояние, в котором выполняется управление поддержанием остановки транспортного средства", представляет собой состояние, в котором тормозная сила, допускающая поддержание состояния остановки транспортного средства, формируется посредством управления, которое автоматически выполняется на стороне транспортного средства независимо от операции нажатия педали BP тормоза водителем.
[0018] Условие разрешения представляет собой условие, которое задается заранее.
В первом варианте осуществления, в качестве примера, описывается случай, в котором относительно условия разрешения, условие, при котором давление тормозной жидкости в соответствии с рабочей величиной нажатия педали BP тормоза превышает или равно давлению жидкости для разрешения, которое задается заранее, задается в качестве условия разрешения. Таким образом, информация помощи, как проиллюстрировано на фиг. 2, представляет собой отображение, чтобы заставлять водителя увеличивать рабочую величину нажатия педали BP тормоза таким образом, что в состоянии, в котором давление тормозной жидкости в соответствии с рабочей величиной нажатия педали BP тормоза меньше давления жидкости для разрешения, давление тормозной жидкости может превышать или быть равно давлению жидкости для разрешения.
Следует отметить, что давление жидкости для разрешения задается равным давлению, превышающему давление тормозной жидкости, при котором состояние остановки транспортного средства может поддерживаться, например, когда состояние поверхности дороги движения представляет собой нормальное состояние, например, ровная дорога, которая не покрыта снегом, и т.п.
[0019] В частности, отображение, чтобы заставлять водителя увеличивать рабочую величину нажатия педали BP тормоза, представляет собой отображение значка, который указывает символьную информацию "Дополнительное нажатие тормоза" и взаимосвязь между педалью BP тормоза и ногой водителя.
Дополнительно, условие разрешения также может включать в себя, например, условие, при котором угол поворота руля при рулении попадает в пределы порогового значения угла поворота при рулении, которое задается заранее, условие, при котором указатель поворота выключается, и условие, при котором позиция переключения коробки передач находится в диапазоне приведения в движение (D-диапазоне и т.п.).
Другими словами, модуль 20 выдачи информационных уведомлений представляет собой конфигурацию для того, чтобы уведомлять пассажира транспортного средства в отношении информации помощи для удовлетворения условия разрешения.
Следует отметить, что в модуле 20 выдачи информационных уведомлений, также может отображаться информация, указывающая то, что управление поддержанием остановки транспортного средства выполняется (например, символьная информация, такая как "SSA выполняется").
[0020] Дополнительно, модуль 10 управления глушением двигателя на холостом ходу включает в себя модуль 12 управления поддержанием остановки транспортного средства, модуль 14 управления автоматической остановкой и модуль 16 управления информацией уведомления.
Модуль 12 управления поддержанием остановки транспортного средства обращается к сигналу выбора управления, вводимому из переключателя 2 выбора режима. После этого, когда сигнал выбора управления содержит результат выбора того, что должно выполняться управление поддержанием остановки транспортного средства, обращаются к сигналу скорости транспортного средства, вводимому из модуля 4 вычисления скорости транспортного средства, и к сигналу давления жидкости, вводимому из гидравлического датчика 6.
Дополнительно, модуль 12 управления поддержанием остановки транспортного средства определяет то, должно или нет выполняться управление поддержанием остановки транспортного средства, в соответствии со скоростью транспортного средства, содержащейся в сигнале скорости транспортного средства, и давлением жидкости, содержащемся в сигнале давления жидкости.
[0021] В частности, когда удовлетворяются условия A1-A3, как описано ниже, определяется то, что должно выполняться управление поддержанием остановки транспортного средства.
Условие A1: скорость транспортного средства равна нулю (аналогично по смыслу 0 (км/ч); то же применимо к нижеприведенному описанию), т.е. транспортное средство остановлено.
Условие A2: давление жидкости тормозной жидкости превышает или равно давлению жидкости для вмешательства, которое задается заранее (давлению жидкости для вмешательства SSA).
Условие A3: рабочая величина нажатия педали BP тормоза превышает предварительно определенную величину (например, нуль или величину, которая преодолевает крутящий момент при медленном движении; то же применимо к нижеприведенному описанию), т.е. педаль BP тормоза нажимается.
[0022] Давление жидкости для вмешательства представляет собой давление жидкости, которое задается меньше давления жидкости для разрешения.
Модуль 12 управления поддержанием остановки транспортного средства, в качестве определения того, что должно выполняться управление поддержанием остановки транспортного средства, выводит значение команды управления для формирования тормозной силы, допускающей поддержание состояния остановки транспортного средства (иногда называется "значением команды управления поддержанием остановки транспортного средства" в нижеприведенном описании), в главный цилиндр MS.
Дополнительно, модуль 12 управления поддержанием остановки транспортного средства, в качестве определения того, что управление поддержанием остановки транспортного средства не должно выполняться в состоянии, в котором значение команды управления поддержанием остановки транспортного средства выводится в главный цилиндр MS, прекращает вывод значения команды управления поддержанием остановки транспортного средства.
Кроме того, модуль 12 управления поддержанием остановки транспортного средства, в качестве определения того, что должно выполняться управление поддержанием остановки транспортного средства, выводит информационный сигнал, содержащий результат определения того, что должно выполняться управление поддержанием остановки транспортного средства (иногда называется "сигналом определения поддержания остановки транспортного средства" в нижеприведенном описании), в модуль 14 управления автоматической остановкой и модуль 16 управления информацией уведомления.
[0023] При приеме ввода сигнала определения поддержания остановки транспортного средства из модуля 12 управления поддержанием остановки транспортного средства, модуль 14 управления автоматической остановкой определяет то, удовлетворяется или нет условие разрешения. После этого, когда определяется то, что условие разрешения удовлетворяется, команда для того, чтобы останавливать работающий двигатель ENG (иногда называется "командой остановки двигателя" в нижеприведенном описании), выводится в контроллер EC двигателя и модуль 16 управления информацией уведомления.
Соответственно, когда условие разрешения удовлетворяется, модуль 14 управления автоматической остановкой выполняет автоматическую остановку (глушение двигателя на холостом ходу, снижение числа оборотов в режиме холостого хода и глушение двигателя в режиме холостого хода) работающего двигателя ENG.
В первом варианте осуществления, в качестве примера, описывается случай, в котором конфигурация модуля 14 управления автоматической остановкой представляет собой конфигурацию, в которой, когда условие разрешения удовлетворяется в состоянии, в котором управление поддержанием остановки транспортного средства выполняется, работающий двигатель ENG автоматически останавливается.
Другими словами, модуль 14 управления автоматической остановкой согласно первому варианту осуществления автоматически останавливает двигатель ENG, когда условие разрешения удовлетворяется в состоянии, в котором транспортное средство остановлено посредством операции нажатия педали BP тормоза водителем.
[0024] При приеме ввода сигнала определения поддержания остановки транспортного средства из модуля 12 управления поддержанием остановки транспортного средства, модуль 16 управления информацией уведомления определяет то, принимается или нет ввод команды остановки двигателя из модуля 14 управления автоматической остановкой. Другими словами, модуль 16 управления информацией уведомления определяет то, удовлетворяется или нет условие разрешения в состоянии, в котором управление поддержанием остановки транспортного средства выполняется.
Затем при приеме и ввод команды остановки двигателя в состоянии, в котором вводится сигнал определения поддержания остановки транспортного средства, модуль 16 управления информацией уведомления определяет то, что условие разрешения удовлетворяется в состоянии, в котором управление поддержанием остановки транспортного средства выполняется.
[0025] Модуль 16 управления информацией уведомления, в качестве определения того, что условие разрешения удовлетворяется, обращается к информационному сигналу, выводимому из датчика BPS тормоза, и к информационному сигналу, вводимому из датчика PBS парковочного тормоза. Помимо этого, модуль 16 управления информацией уведомления, в качестве определения того, что условие разрешения удовлетворяется, обращается к информационному сигналу, вводимому из датчика SPS позиции переключения коробки передач, и к сигналу давления жидкости, вводимому из гидравлического датчика 6.
Дополнительно, модуль 16 управления информацией уведомления определяет то, следует или нет уведомлять пассажира транспортного средства в отношении информации зажигания, в соответствии с рабочей величиной нажатия педали BP тормоза, рабочим состоянием парковочного тормоза PKB, диапазоном, выбранным водителем, и давлением жидкости, которые содержатся в каждом типе вводимых информационных сигналов.
[0026] В частности, когда условия A4-A7, как описано ниже, удовлетворяются в состоянии, в котором двигатель ENG автоматически останавливается, определяется уведомлять пассажира транспортного средства в отношении информации зажигания.
Условие A4: рабочая величина нажатия педали BP тормоза равна нулю, т.е. педаль BP тормоза не нажимается, и операция нажатия педали тормоза отменена.
Условие A5: парковочный тормоз PKB нажимается.
Условие A6: посредством операции нажатия переключателя SL диапазона передач водителем, выбирается диапазон отсутствия приведения в движение (P-диапазон или N-диапазон).
Условие A7: давление жидкости тормозной жидкости меньше давления жидкости для вмешательства (давления жидкости для вмешательства SSA).
[0027] Информация зажигания представляет собой информацию, которая указывает то, что состояние переключателя зажигания (не проиллюстрирован), предоставленного в транспортном средстве, является включенным.
В первом варианте осуществления, в качестве примера, описывается случай, в котором автоматически остановленный двигатель ENG повторно запускается, за счет этого уведомляя пассажира транспортного средства в отношении информации зажигания.
Соответственно, в первом варианте осуществления, в качестве примера, описывается случай, в котором конфигурация модуля 16 управления информацией уведомления представляет собой конфигурацию, в которой когда, как описано выше, удовлетворяются условия A4-A7, команда повторного запуска двигателя выводится в контроллер EC двигателя.
Команда повторного запуска двигателя представляет собой команду для того, чтобы повторно запускать автоматически остановленный двигатель ENG.
Переключатель зажигания представляет собой переключатель для того, чтобы выбирать запуск или остановку двигателя ENG посредством операции пассажира (водителя) транспортного средства.
Дополнительно, то, что "состояние переключателя зажигания является включенным", указывает состояние, в котором переключатель зажигания нажимается таким образом, что двигатель ENG запускается. Кроме того, то, что "состояние переключателя зажигания является выключенным", указывает состояние, в котором запущенный двигатель ENG остановлен посредством операции переключателя зажигания.
[0028] С другой стороны, при отсутствии приема и ввода команды остановки двигателя в состоянии, в котором вводится сигнал определения поддержания остановки транспортного средства, модуль 16 управления информацией уведомления определяет то, что условие разрешения не удовлетворяется в состоянии, в котором управление поддержанием остановки транспортного средства выполняется.
Модуль 16 управления информацией уведомления, в качестве определения того, что условие разрешения не удовлетворяется, выводит информационный сигнал, содержащий команду для того, чтобы обеспечивать загорание информации помощи на устройстве отображения (иногда называется "сигналом загорания информации" в нижеприведенном описании), в модуль 20 выдачи информационных уведомлений.
Дополнительно, модуль 16 управления информацией уведомления выводит информационный сигнал, содержащий команду для того, чтобы выключать информацию помощи в момент времени, когда, со времени, в которое сигнал загорания информации помощи выводится в модуль 20 выдачи информационных уведомлений, время продолжения выдачи уведомления истекает (иногда называется "сигналом выключения информации" в нижеприведенном описании), в модуль 20 выдачи информационных уведомлений.
[0029] Время продолжения выдачи уведомления представляет собой время, которое задается заранее. Дополнительно, время продолжения выдачи уведомления задается, например, в соответствии с классом автомобилей для транспортного средства (классом транспортного средства согласно размеру кузова, рабочему объему двигателя ENG и т.п.) и позицией (позицией визуального распознавания) устройства отображения, предоставленного в модуле 20 выдачи информационных уведомлений.
Следует отметить, что в первом варианте осуществления, в качестве примера, описывается случай, в котором время продолжения выдачи уведомления задается равным 2 (сек).
Как описано выше, модуль 16 управления информацией уведомления начинает уведомлять пассажира транспортного средства в отношении информации зажигания в момент времени, когда рабочая величина нажатия педали BP тормоза равна нулю в то время, когда парковочный тормоз PKB нажимается в состоянии, в котором двигатель ENG автоматически останавливается.
Главный цилиндр MS представляет собой устройство, которое подает в колесный тормозной цилиндр WS тормозную жидкость.
Дополнительно, главный цилиндр MS обеспечивает возможность работы поршня в главном цилиндре MS, например, посредством предоставления возможности электромотору для тормозов (не проиллюстрированы), размещенному в главном цилиндре MS и т.п., работать в соответствии со значением команды управления поддержанием остановки транспортного средства, вводимым из модуля 10 управления глушением двигателя на холостом ходу. В силу этого, в главном цилиндре MS, формируется давление жидкости в соответствии со значением команды управления поддержанием остановки транспортного средства. Затем тормозная жидкость, имеющая давление жидкости в соответствии со значением команды управления поддержанием остановки транспортного средства, подается в колесный тормозной цилиндр WS.
[0030] Колесный тормозной цилиндр WS обеспечивает возможность формирования прижимающей силы для прижатия тормозной колодки (не проиллюстрирована), которая составляет дисковый тормоз, к дисковому ротору (не проиллюстрирован). Дисковый ротор вращается как единое целое с каждым колесом W и входит в контакт с тормозной колодкой таким образом, чтобы формировать фрикционное сопротивление.
Другими словами, главный цилиндр MS и колесный тормозной цилиндр WS предоставляются в колесе и формируют фрикционный тормоз, который формирует фрикционную тормозную силу в колесе.
Контроллер EC двигателя останавливает работающий двигатель ENG в соответствии с командой остановки двигателя, вводимой из модуля 10 управления глушением двигателя на холостом ходу.
Двигатель ENG формирует источник формирования движущей силы транспортного средства.
Как описано выше, модуль 10 управления глушением двигателя на холостом ходу управляет главным цилиндром MS, контроллером EC двигателя и модулем 20 выдачи информационных уведомлений, которые предоставляются в транспортном средстве, с использованием каждого типа вводимых информационных сигналов.
[0031] Процесс, выполняемый посредством модуля 10 управления глушением двигателя на холостом ходу
Со ссылкой на фиг. 1 и 2 и с использованием фиг. 3-1 и 3-2, ниже описывается один пример процесса, выполняемого посредством модуля 10 управления глушением двигателя на холостом ходу. Следует отметить, что процесс, выполняемый посредством модуля 10 управления глушением двигателя на холостом ходу, иногда называется "процессом управления глушением двигателя на холостом ходу" в нижеприведенном описании. Дополнительно, процесс, как проиллюстрировано на фиг. 3, представляет собой процесс, когда переключатель 2 выбора режима выбирается, чтобы выполнять управление поддержанием остановки транспортного средства.
Как проиллюстрировано на фиг. 3, когда процесс управления глушением двигателя на холостом ходу начинается ("Начало"), во-первых, выполняется процесс на этапе S100.
[0032] На этапе S100, модуль 4 вычисления скорости транспортного средства вычисляет скорость транспортного средства ("Вычисление скорости транспортного средства", как проиллюстрировано на чертеже). На этапе S100, когда скорость транспортного средства вычисляется, процесс управления глушением двигателя на холостом ходу переходит к этапу S102.
На этапе S102, определяется то, равна или нет скорость транспортного средства, вычисленная на этапе S100, нулю, за счет этого выполняя процесс для того, чтобы определять то, остановлено или нет транспортное средство ("Остановка транспортного средства", как проиллюстрировано на чертеже).
На этапе S102, когда определяется то, что транспортное средство остановлено ("Да", как проиллюстрировано на чертеже), процесс управления глушением двигателя на холостом ходу переходит к этапу S104.
С другой стороны, на этапе S102, когда определяется то, что транспортное средство не остановлено ("Нет", как проиллюстрировано на чертеже), процесс управления глушением двигателя на холостом ходу переходит к этапу S100.
[0033] На этапе S104, модуль 12 управления поддержанием остановки транспортного средства выполняет процесс для того, чтобы определять то, превышает или равно либо нет давление жидкости тормозной жидкости, определенное посредством гидравлического датчика 6, давлению жидкости для вмешательства ("Давление жидкости ≥ давление жидкости для вмешательства", как проиллюстрировано на чертеже).
На этапе S104, когда определяется то, что давление жидкости тормозной жидкости превышает или равно давлению жидкости для вмешательства ("Да", как проиллюстрировано на чертеже), процесс управления глушением двигателя на холостом ходу переходит к этапу S106.
С другой стороны, на этапе S104, когда определяется то, что давление жидкости тормозной жидкости меньше давления жидкости для вмешательства ("Нет", как проиллюстрировано на чертеже), процесс управления глушением двигателя на холостом ходу возвращается к процессу на этапе S100 ("Возврат").
[0034] На этапе S106, модуль 12 управления поддержанием остановки транспортного средства выводит значение команды управления поддержанием остановки транспортного средства в главный цилиндр MS. Другими словами, на этапе S106, выполняется процесс для того, чтобы выполнять управление поддержанием остановки транспортного средства ("SSA выполняется", как проиллюстрировано на чертеже). На этапе S106, когда управление поддержанием остановки транспортного средства выполняется, процесс управления глушением двигателя на холостом ходу переходит к этапу S108.
На этапе S108, модуль 14 управления автоматической остановкой выполняет процесс для того, чтобы определять то, превышает или равно либо нет давление жидкости тормозной жидкости, определенное посредством гидравлического датчика 6, давлению жидкости для разрешения ("Давление жидкости ≥ давление жидкости для разрешения", как проиллюстрировано на чертеже).
На этапе S108, когда определяется то, что давление жидкости тормозной жидкости превышает или равно давлению жидкости для разрешения ("Да", как проиллюстрировано на чертеже), процесс управления глушением двигателя на холостом ходу переходит к этапу S112.
[0035] С другой стороны, на этапе S108, когда определяется то, что давление жидкости тормозной жидкости меньше давления жидкости для разрешения ("Нет", как проиллюстрировано на чертеже), процесс управления глушением двигателя на холостом ходу переходит к этапу S110.
На этапе S110, сигнал загорания информации выводится из модуля 16 управления информацией уведомления в модуль 20 выдачи информационных уведомлений. В силу этого, на этапе S110, информация помощи загорается на устройстве отображения ("Загорание информации помощи", как проиллюстрировано на чертеже). На этапе S110, когда информация помощи загорается на устройстве отображения, процесс управления глушением двигателя на холостом ходу возвращается к процессу на этапе S100 ("Возврат").
[0036] На этапе S112, модуль 14 управления автоматической остановкой выводит команду остановки двигателя в контроллер EC двигателя. В силу этого, на этапе S112, процесс для того, чтобы автоматически останавливать работающий двигатель ENG ("Глушение двигателя на холостом ходу", как проиллюстрировано на чертеже), выполняется. На этапе S112, когда работающий двигатель ENG автоматически останавливается, процесс управления глушением двигателя на холостом ходу переходит к этапу S114.
На этапе S114, сигнал выключения информации выводится из модуля 16 управления информацией уведомления в модуль 20 выдачи информационных уведомлений. В силу этого, на этапе S114, информация помощи, загорающаяся на устройстве отображения, выключается ("Выключение информации помощи", как проиллюстрировано на чертеже). На этапе S114, когда информация помощи, загорающаяся на устройстве отображения, выключается, процесс управления глушением двигателя на холостом ходу переходит к этапу S116.
[0037] На этапе S116, модуль 16 управления информацией уведомления выполняет процесс для того, чтобы определять то, равна или нет рабочая величина нажатия педали BP тормоза нулю ("Тормоз выключен", как проиллюстрировано на чертеже).
На этапе S116, когда определяется то, что рабочая величина нажатия педали BP тормоза уменьшается таким образом, что она равна нулю ("Да", как проиллюстрировано на чертеже), процесс управления глушением двигателя на холостом ходу переходит к этапу S118.
С другой стороны, на этапе S116, когда определяется то, что рабочая величина нажатия педали BP тормоза превышает нуль ("Нет", как проиллюстрировано на чертеже), процесс управления глушением двигателя на холостом ходу возвращается к процессу на этапе S100 ("Возврат").
На этапе S118, модуль 16 управления информацией уведомления выполняет процесс для того, чтобы определять то, выбирается или нет диапазон отсутствия приведения в движение посредством операции нажатия переключателя SL диапазона передач водителем ("Диапазон отсутствия приведения в движение", как проиллюстрировано на чертеже).
[0038] На этапе S118, когда определяется то, что диапазон отсутствия приведения в движение выбирается ("Да", как проиллюстрировано на чертеже), процесс управления глушением двигателя на холостом ходу переходит к этапу S120.
С другой стороны, на этапе S118, когда определяется то, что диапазон приведения в движение выбирается ("Нет", как проиллюстрировано на чертеже), процесс управления глушением двигателя на холостом ходу возвращается к процессу на этапе S100 ("Возврат").
На этапе S120, модуль 16 управления информацией уведомления выполняет процесс для того, чтобы определять то, нажимается или нет парковочный тормоз PKB ("PKB нажимается", как проиллюстрировано на чертеже).
На этапе S120, когда определяется то, что парковочный тормоз PKB нажимается ("Да", как проиллюстрировано на чертеже), процесс управления глушением двигателя на холостом ходу переходит к этапу S122.
[0039] С другой стороны, на этапе S120, когда определяется то, что парковочный тормоз PKB не нажимается ("Нет", как проиллюстрировано на чертеже), процесс управления глушением двигателя на холостом ходу возвращается к процессу на этапе S100 ("Возврат").
На этапе S122, модуль 14 управления автоматической остановкой выполняет процесс для того, чтобы определять то, меньше или нет давление жидкости тормозной жидкости, определенное посредством гидравлического датчика 6, давления жидкости для разрешения ("Давление жидкости < давление жидкости для разрешения", как проиллюстрировано на чертеже).
На этапе S122, когда определяется то, что давление жидкости тормозной жидкости меньше давления жидкости для разрешения ("Да", как проиллюстрировано на чертеже), процесс управления глушением двигателя на холостом ходу переходит к этапу S124.
С другой стороны, на этапе S122, когда определяется то, что давление жидкости тормозной жидкости превышает или равно давлению жидкости для разрешения ("Нет", как проиллюстрировано на чертеже), процесс управления глушением двигателя на холостом ходу возвращается к процессу на этапе S100 ("Возврат").
[0040] На этапе S124, модуль 12 управления поддержанием остановки транспортного средства прекращает вывод значения команды управления поддержанием остановки транспортного средства в главный цилиндр MS. Другими словами, на этапе S124, выполняется процесс для того, чтобы отменять выполняемое управление поддержанием остановки транспортного средства ("Отмена SSA", как проиллюстрировано на чертеже). На этапе S124, когда выполняемое управление поддержанием остановки транспортного средства отменяется, процесс управления глушением двигателя на холостом ходу переходит к этапу S126.
На этапе S126, модуль 16 управления информацией уведомления выполняет процесс для того, чтобы определять то, меньше или нет давление жидкости тормозной жидкости, определенное посредством гидравлического датчика 6, давления жидкости для вмешательства ("Давление жидкости < давление жидкости для вмешательства", как проиллюстрировано на чертеже).
[0041] На этапе S126, когда определяется то, что давление жидкости тормозной жидкости меньше давления жидкости для вмешательства ("Да", как проиллюстрировано на чертеже), процесс управления глушением двигателя на холостом ходу переходит к этапу S128.
С другой стороны, на этапе S126, когда определяется то, что давление жидкости тормозной жидкости превышает или равно давлению жидкости для вмешательства ("Нет", как проиллюстрировано на чертеже), процесс управления глушением двигателя на холостом ходу возвращается к процессу на этапе S100 ("Возврат").
На этапе S128, команда повторного запуска двигателя выводится из модуля 16 управления информацией уведомления в контроллер EC двигателя. В силу этого, на этапе S128, двигатель, автоматически остановленный на этапе S112, повторно запускается ("Повторный запуск двигателя", как проиллюстрировано на чертеже). На этапе S128, когда автоматически остановленный двигатель ENG повторно запускается, процесс управления глушением двигателя на холостом ходу возвращается к процессу на этапе S100 ("Возврат").
[0042] Работа
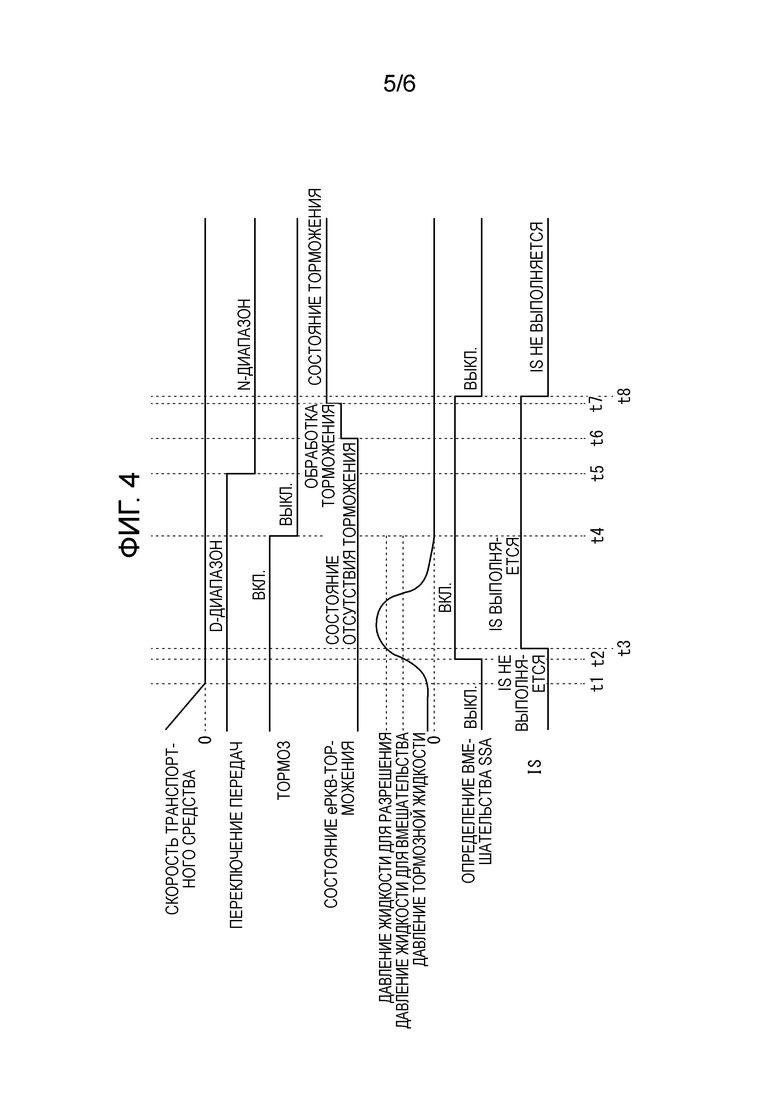
Со ссылкой на фиг. 1-3 и с использованием фиг. 4, ниже описывается один пример работы, выполняемой с использованием устройства 1 управления глушением двигателя на холостом ходу согласно первому варианту осуществления. Следует отметить, что фиг. 4 иллюстрирует временную диаграмму работы, которая выполняется посредством конфигурации, в которой используется устройство 1 управления глушением двигателя на холостом ходу согласно первому варианту осуществления. Дополнительно, временная диаграмма, как проиллюстрировано на фиг. 4, представляет собой временную диаграмму, когда переключатель 2 выбора режима выбирается, чтобы выполнять управление поддержанием остановки транспортного средства.
Кроме того, временная диаграмма, как проиллюстрировано на фиг. 4, начинается из состояния, в котором во время движения транспортного средства (скорость транспортного средства > 0), водитель нажимает педаль тормоза BP (тормоз включен). Соответственно, в момент времени, когда временная диаграмма, как проиллюстрировано на фиг. 4, начинается, в качестве позиции переключения коробки передач, выбирается D-диапазон (диапазон приведения в движение).
Следует отметить, что в элементе, указываемом посредством "Тормоз" на фиг. 4, когда рабочая величина нажатия педали BP тормоза равна нулю, указывается "Выключен", а когда рабочая величина нажатия педали BP тормоза превышает нуль, указывается "Включен".
[0043] В момент времени, когда временная диаграмма, как проиллюстрировано на фиг. 4, начинается, давление тормозной жидкости в соответствии с рабочей величиной нажатия педали BP тормоза водителем формируется таким образом, что скорость транспортного средства уменьшается. Кроме того, в момент времени, когда временная диаграмма, как проиллюстрировано на фиг. 4, начинается, давление тормозной жидкости меньше давления жидкости для вмешательства ("Определение вмешательства SSA выключено"), так что управление поддержанием остановки транспортного средства не выполняется. Дополнительно, в момент времени, когда временная диаграмма, как проиллюстрировано на фиг. 4, начинается, двигатель работает, и глушение двигателя на холостом ходу не выполняется ("IS не выполняется").
Следует отметить, что в элементе, указываемом посредством "Определение вмешательства SSA" на фиг. 4, состояние, в котором давление тормозной жидкости превышает или равно давлению жидкости для вмешательства, и управление поддержанием остановки транспортного средства выполняется, указывается посредством "Включен", и состояние, в котором давление тормозной жидкости меньше давления жидкости для вмешательства, и управление поддержанием остановки транспортного средства не выполняется, указывается посредством "Выключен". Аналогично, в элементе, указываемом посредством "IS" на фиг. 4, состояние, в котором глушение двигателя на холостом ходу не выполняется, указывается посредством "IS не выполняется", и состояние, в котором глушение двигателя на холостом ходу выполняется, указывается посредством "IS выполняется".
[0044] После того, как временная диаграмма, как проиллюстрировано на фиг. 4, начинается, в момент времени, когда скорость транспортного средства составляет нуль, т.е. транспортное средство остановлено (время t1), определяется то, удовлетворяется или нет условие, при котором давление жидкости тормозной жидкости превышает или равно давлению жидкости для вмешательства, и условие, при котором рабочая величина нажатия педали BP тормоза превышает нуль. Затем в момент времени, когда определяется то, что давление жидкости тормозной жидкости превышает или равно давлению жидкости для вмешательства, в то время как рабочая величина нажатия педали BP тормоза превышает нуль (время t2), управление поддержанием остановки транспортного средства выполняется ("Определение вмешательства SSA включено").
После времени t2, определяется то, удовлетворяется или нет условие, при котором давление жидкости тормозной жидкости превышает или равно давлению жидкости для разрешения. Затем в момент времени, когда определяется то, что давление жидкости тормозной жидкости превышает или равно давлению жидкости для разрешения (время t3), глушение двигателя на холостом ходу выполняется ("IS выполняется").
Следует отметить, что давление тормозной жидкости во время t3 представляет собой давление тормозной жидкости, имеющее такую абсолютную величину, чтобы допускать поддержание состояния остановки транспортного средства против крутящего момента при медленном движении, сформированного в транспортном средстве в состоянии, в котором двигатель ENG работает.
[0045] После времени t3, когда рабочая величина нажатия педали BP тормоза водителем начинает уменьшаться, и рабочая величина нажатия педали BP тормоза составляет нуль (время t4), давление тормозной жидкости составляет нуль ("0", как проиллюстрировано на фиг. 4). Следует отметить, что то, что давление тормозной жидкости равно нулю, означает то, что давление тормозной жидкости равно 0 (кг/см2), и то же применимо в нижеприведенном описании.
Другими словами, во время t4, рабочая величина нажатия педали BP тормоза и давление тормозной жидкости составляют нуль ("Тормоз выключен", "Давление тормозной жидкости равно нулю"). Таким образом, во время t4, из числа условий A4-A7, удовлетворяются условие A4 и условие A7.
[0046] После того как, во время t4, рабочая величина нажатия педали BP тормоза и давление тормозной жидкости составляют нуль, определяется то, удовлетворяются или нет условие, при котором, в качестве позиции переключения коробки передач, выбирается диапазон отсутствия приведения в движение, и условие, при котором нажимается парковочный тормоз PKB.
Следует отметить, что в элементе, указываемом посредством "Состояние ePKB-торможения" на фиг. 4, состояние, в котором парковочный тормоз PKB нажимается, указывается посредством "Состояние торможения", и состояние, в котором парковочный тормоз PKB не нажимается, указывается посредством "Состояние отсутствия торможения". Дополнительно, в элементе, указываемом посредством "Состояние ePKB-торможения" на фиг. 4, состояние, в котором парковочный тормоз PKB манипулируется (запускается), указывается посредством "Обработка торможения".
[0047] Затем в момент времени, когда в качестве позиции переключения коробки передач, выбирается N-диапазон (диапазон отсутствия приведения в движение) (время t5), из числа условий A4-A7, условие A4, удовлетворяются условие A6 и условие A7.
Дополнительно, в момент времени, когда нажимается парковочный тормоз PKB, который начинает манипулироваться водителем во время t6 (состояние торможения) (время t7), удовлетворяются условия A4-A7, как описано выше.
Таким образом, время t7 представляет собой время, в которое двигатель автоматически останавливается, время, в которое управление поддержанием остановки транспортного средства выполняется, и время, в которое удовлетворяются условие, при котором операция нажатия педали BP тормоза отменена, и условие, при котором парковочный тормоз PKB нажимается.
Когда условия A4-A7, как описано выше, удовлетворяются во время t7, вывод значения команды управления поддержанием остановки транспортного средства прекращается. Затем в момент времени, когда давление жидкости, сформированное в главном цилиндре MS, уменьшается таким образом, что оно меньше давления жидкости в соответствии со значением команды управления поддержанием остановки транспортного средства (время t8), выполняемое управление поддержанием остановки транспортного средства прекращается ("Определение вмешательства SSA выключено").
[0048] Дополнительно, во время t8, выполняемое управление поддержанием остановки транспортного средства прекращается, в то время как команда повторного запуска двигателя выводится в контроллер EC двигателя. В силу этого, во время t8, двигатель ENG, автоматически остановленный во время t3, повторно запускается ("IS не выполняется").
Следует отметить, что хотя конкретно не проиллюстрировано, в операции, выполняемой с использованием устройства 1 управления глушением двигателя на холостом ходу согласно первому варианту осуществления, когда педаль акселератора, предоставленная в транспортном средстве, нажимается в состоянии, в котором информация помощи загорается, загорающаяся информация помощи выключается.
[0049] Как описано выше, в устройстве 1 управления глушением двигателя на холостом ходу согласно первому варианту осуществления, когда двигатель ENG автоматически останавливается в то время, когда управление поддержанием остановки транспортного средства выполняется, автоматически остановленный двигатель ENG повторно запускается. В данном документе, автоматически остановленный двигатель ENG повторно запускается в момент времени, когда удовлетворяются условие, при котором операция нажатия педали BP тормоза отменена, и условие, при котором парковочный тормоз PKB нажимается.
Другими словами, в устройстве 1 управления глушением двигателя на холостом ходу согласно первому варианту осуществления, когда условие разрешения удовлетворяется, двигатель ENG автоматически останавливается, и когда парковочный тормоз PKB нажимается в то время, когда двигатель ENG автоматически останавливается, информация зажигания уведомляется водителю.
В силу этого, автоматически остановленный двигатель ENG повторно запускается, так что начинается уведомление относительно информации зажигания пассажиру транспортного средства.
[0050] Как описано выше, в способе управления глушением двигателя на холостом ходу с использованием устройства 1 управления глушением двигателя на холостом ходу согласно первому варианту осуществления, когда условие разрешения удовлетворяется в состоянии, в котором транспортное средство остановлено посредством операции нажатия педали BP тормоза водителем, двигатель ENG автоматически останавливается. Помимо этого, когда двигатель ENG автоматически останавливается в то время, когда управление поддержанием остановки транспортного средства выполняется, начинается уведомление относительно информации зажигания пассажиру транспортного средства в момент времени, когда удовлетворяются условия A4 и A5, как описано выше.
Другими словами, в способе управления глушением двигателя на холостом ходу согласно первому варианту осуществления, когда условие разрешения удовлетворяется, двигатель ENG автоматически останавливается, и когда парковочный тормоз PKB нажимается в то время, когда двигатель ENG автоматически останавливается, информация зажигания уведомляется водителю.
Следует отметить, что первый вариант осуществления, как описано выше, является одним примером настоящего изобретения, и настоящее изобретение не должно ограничиваться первым вариантом осуществления, как описано выше, и даже в варианты осуществления, отличные от такого варианта осуществления, могут вноситься различные модификации в соответствии с проектным решением и т.п. без отступления от технической идеи настоящего изобретения.
[0051] Преимущества первого варианта осуществления
В способе управления глушением двигателя на холостом ходу с использованием устройства 1 управления глушением двигателя на холостом ходу согласно первому варианту осуществления, появляется возможность обеспечивать преимущества, как описано ниже.
(1) Когда условие разрешения удовлетворяется, двигатель ENG автоматически останавливается, и когда парковочный тормоз PKB нажимается в то время, когда двигатель ENG автоматически останавливается, информация зажигания уведомляется водителю.
Соответственно, после того, как двигатель ENG автоматически останавливается, и в момент времени, когда парковочный тормоз PKB нажимается, информация зажигания уведомляется водителю транспортного средства.
Как результат, появляется возможность уведомлять водителя относительно информации зажигания после выполнения операции нажатия педали парковочного тормоза PKB, которая представляет собой операцию, которая выполняется с большой вероятностью в момент времени, когда водитель выходит из транспортного средства.
Таким образом, появляется возможность запрещать выход водителя из транспортного средства, в котором состояние переключателя зажигания является включенным.
[0052] (2) Когда условие разрешения удовлетворяется в состоянии, в котором транспортное средство остановлено посредством операции нажатия педали BP тормоза водителем, двигатель ENG автоматически останавливается. Помимо этого, когда двигатель ENG автоматически останавливается в то время, когда управление поддержанием остановки транспортного средства выполняется, начинается уведомление относительно информации зажигания пассажиру транспортного средства в момент времени, когда удовлетворяются условия A4 и A5, как описано выше.
Соответственно, появляется возможность того, что информация зажигания уведомляется водителю транспортного средства после того, как двигатель ENG автоматически останавливается, и в момент времени, когда операция нажатия педали BP тормоза отменена водителем в то время, когда парковочный тормоз PKB нажимается.
Как результат, появляется возможность уведомлять водителя относительно выполненной информации зажигания и операции отмены операции нажатия педали BP тормоза и операции нажатия педали парковочного тормоза PKB, которые представляют собой операции, которые выполняются с большой вероятностью в момент времени, когда водитель выходит из транспортного средства.
Таким образом, появляется возможность запрещать выход водителя из транспортного средства, в котором состояние переключателя зажигания является включенным.
[0053] (3) Автоматически остановленный двигатель ENG повторно запускается, так что уведомление относительно информации зажигания начинается.
Как результат, появляется возможность уведомлять в отношении того, что состояние переключателя зажигания является включенным, посредством вибраций, сформированных в транспортном средстве, когда двигатель ENG повторно запускается, шумов, сформированных из двигателя ENG и т.п., водителя, выполняющего операцию, которая выполняется с большой вероятностью в момент времени, когда водитель выходит из транспортного средства.
[0054] (4) Автоматически остановленный двигатель ENG повторно запускается только тогда, когда диапазон отсутствия приведения в движение выбирается, за счет этого начиная уведомление относительно информации зажигания.
Как результат, появляется возможность предотвращать передачу движущей силы из двигателя ENG на колесо в момент времени, когда двигатель ENG повторно запускается, так что перемещение транспортного средства, которое не предусмотрено водителем, может запрещаться.
Дополнительно, в устройстве 1 управления глушением двигателя на холостом ходу согласно первому варианту осуществления, появляется возможность обеспечивать преимущества, как описано ниже.
[0055] (5) Модуль 14 управления автоматической остановкой автоматически останавливает двигатель ENG, когда условие разрешения удовлетворяется.
Помимо этого, когда парковочный тормоз PKB нажимается в то время, когда двигатель ENG автоматически останавливается посредством модуля 14 управления автоматической остановкой, модуль 16 управления информацией уведомления уведомляет информацию зажигания водителю.
Соответственно, после того, как двигатель ENG автоматически останавливается, и в момент времени, когда парковочный тормоз PKB нажимается, информация зажигания уведомляется водителю транспортного средства.
Как результат, появляется возможность уведомлять информацию зажигания водителю, выполняющему операцию нажатия педали парковочного тормоза PKB, которая представляет собой операцию, которая выполняется с большой вероятностью в момент времени, когда водитель выходит из транспортного средства.
Таким образом, появляется возможность запрещать выход водителя из транспортного средства, в котором состояние переключателя зажигания является включенным.
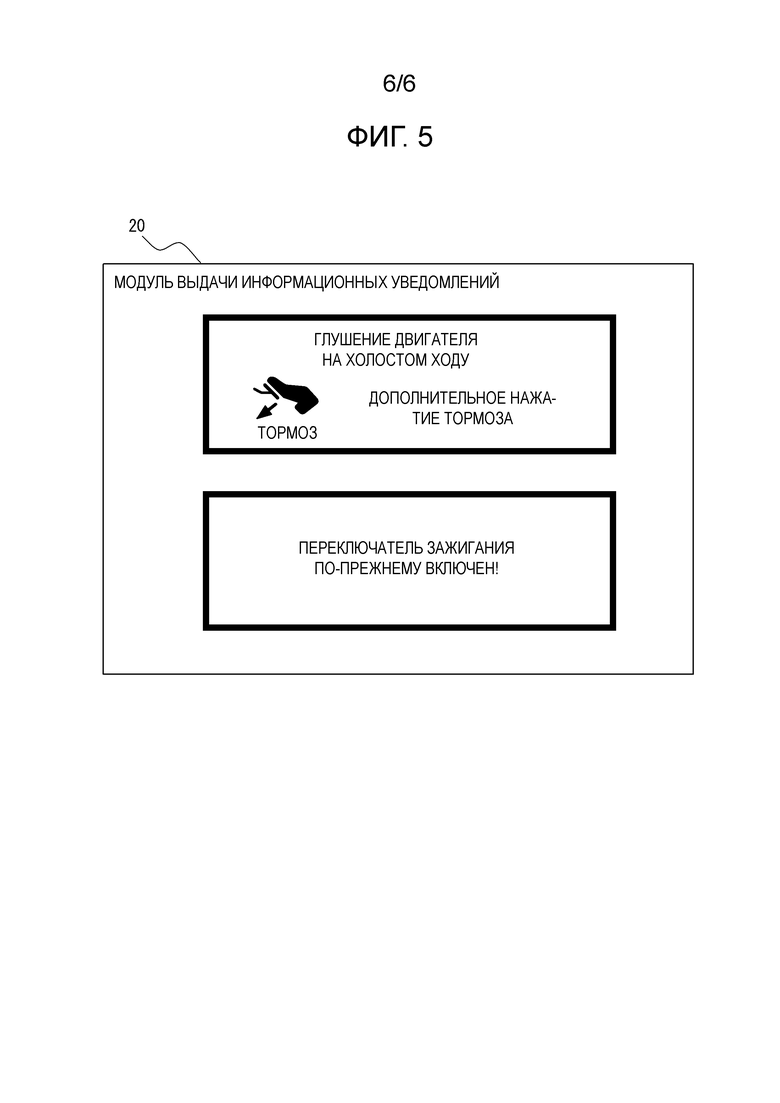
[0056] Примеры модификаций первого варианта осуществления
(1) В первом варианте осуществления, автоматически остановленный двигатель ENG повторно запускается, так что начинается уведомление относительно информации зажигания пассажиру транспортного средства. Тем не менее, конфигурация для того, чтобы начинать уведомление относительно информации зажигания, не должна ограничиваться вышеуказанным.
Другими словами, уведомление относительно информации зажигания пассажиру транспортного средства также может начинаться посредством отображения символа, который указывает то, что состояние переключателя зажигания транспортного средства является включенным, на устройстве отображения, предоставленном в модуле 20 выдачи информационных уведомлений.
[0057] Дополнительно, уведомление относительно информации зажигания пассажиру транспортного средства также может начинаться посредством повторного запуска автоматически остановленного двигателя ENG при отображении символа, который указывает то, что состояние переключателя зажигания транспортного средства является включенным, на устройстве отображения, предоставленном в модуле 20 выдачи информационных уведомлений.
В данном документе, символ, который указывает то, что состояние переключателя зажигания транспортного средства является включенным, например, представляет собой такой символ, что "Переключатель зажигания по-прежнему включен!", как проиллюстрировано на фиг. 5. Дополнительно, значок, который указывает состояние, в котором переключатель зажигания включен, может отображаться на устройстве отображения, предоставленном в модуле 20 выдачи информационных уведомлений. Следует отметить, что на фиг. 5, проиллюстрировано состояние, в котором вместе с информацией помощи, информация зажигания в виде символов, которая указывает то, что состояние переключателя зажигания транспортного средства является включенным, загорается на устройстве отображения.
[0058] В таком случае, время, в которое символ или значок отображается на устройстве отображения, предоставленном в модуле 20 выдачи информационных уведомлений, может изменяться в соответствии с истекшим временем от момента, когда двигатель ENG автоматически останавливается, до момента, когда парковочный тормоз PKB нажимается.
В частности, чем меньше истекшее время от момента, когда двигатель ENG автоматически останавливается, до момента, когда парковочный тормоз PKB нажимается, тем большим конфигурируется время, в которое символ или значок, который указывает то, что состояние переключателя зажигания транспортного средства является включенным, отображается на устройстве отображения, предоставленном в модуле 20 выдачи информационных уведомлений.
[0059] (2) В первом варианте осуществления, когда условие A6 удовлетворяется, т.е. когда диапазон отсутствия приведения в движение выбирается, автоматически остановленный двигатель ENG повторно запускается, так что начинается уведомление относительно информации зажигания пассажиру транспортного средства, что, тем не менее, не является ограничивающим.
Другими словами, уведомление относительно информации зажигания пассажиру транспортного средства также может начинаться посредством повторного запуска автоматически остановленного двигателя ENG, даже когда диапазон приведения в движение выбирается (когда условие A6 не удовлетворяется).
[0060] (3) В первом варианте осуществления, как проиллюстрировано на фиг. 2, информация помощи представляет собой отображение, чтобы заставлять водителя увеличивать рабочую величину нажатия педали BP тормоза, но информация помощи не ограничена вышеуказанным.
Другими словами, информация помощи, например, также может представлять собой шум (голос, аварийный сигнал и т.п.), чтобы заставлять водителя увеличивать рабочую величину нажатия педали BP тормоза.
Аналогично, информация зажигания, например, также может представлять собой шум (голос, аварийный сигнал и т.п.), чтобы уведомлять в отношении того, что состояние переключателя зажигания является включенным.
[0061] (4) В первом варианте осуществления, операция нажатия педали тормоза водителем представляет собой операцию нажатия педали BP тормоза водителем, что, тем не менее, не является ограничивающим.
Другими словами, когда конфигурация транспортного средства, например, представляет собой конфигурацию, содержащую тормозной рычаг, который указывает тормозную силу транспортного средства посредством операции вручную водителем, операция нажатия педали тормоза водителем также может представлять собой операцию нажатия тормозного рычага водителем.
[0062] Список номеров ссылок
1 - устройство управления глушением двигателя на холостом ходу
2 - переключатель выбора режима
4 - модуль вычисления скорости транспортного средства
6 - гидравлический датчик
10 - модуль управления глушением двигателя на холостом ходу
12 - модуль управления поддержанием остановки транспортного средства
14 - модуль управления автоматической остановкой
16 - модуль управления информацией уведомления
20 - модуль выдачи информационных уведомлений
BPS - датчик тормоза
BP - педаль тормоза
PBS - датчик парковочного тормоза
PKB - парковочный тормоз
SPS - датчик позиции переключения коробки передач
SL - переключатель диапазона передач
MS - главный цилиндр
ENG - двигатель
EC - контроллер двигателя
WS - колесный тормозной цилиндр
Изобретение может быть использовано в двигателях внутреннего сгорания. Предложен способ управления глушением двигателя на холостом ходу. Автоматически останавливают двигатель транспортного средства, когда удовлетворяется условие разрешения, заданное заранее. Условие разрешения удовлетворяет состояние, в котором выполняется управление поддержанием остановки транспортного средства для формирования тормозной силы, поддерживающей состояние остановки транспортного средства. И автоматически останавливают двигатель из состояния, в котором транспортное средство остановлено посредством операции нажатия тормоза водителем, водитель уменьшает операцию нажатия педали тормоза. Уведомляют водителя об информации зажигания для указания, что переключатель зажигания включен, когда парковочный тормоз приводится в действие в то время, когда двигатель автоматически остановлен. Условие разрешения включает в себя условие, при котором состояние операции нажатия тормоза водителем представляет собой первое рабочее состояние тормоза, заданное заранее. Рабочее условие, выполняющее управление поддержанием остановки транспортного средства, включает в себя условие, при котором состояние операции нажатия тормоза водителем представляет собой второе рабочее состояние тормоза, заданное заранее. Рабочая величина операции нажатия тормоза водителем, включенная в первое рабочее состояние тормоза, превышает рабочую величину, включенную во второе рабочее состояние тормоза. Раскрыто устройство управления глушением двигателя на холостом ходу. Технический результат заключается в предотвращении оставления водителем транспортного средства с включенным переключателем зажигания. 2 н. и 2 з.п. ф-лы, 6 ил.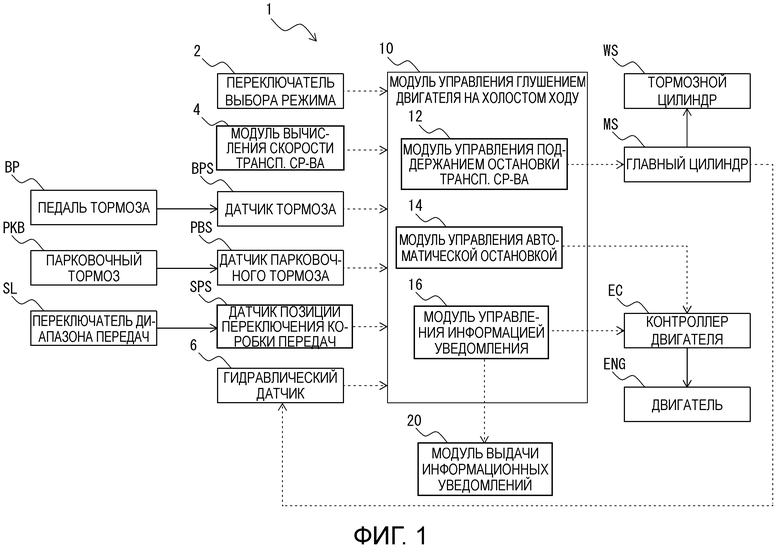
1. Способ управления глушением двигателя на холостом ходу, содержащий этапы, на которых:
- автоматически останавливают двигатель транспортного средства, когда условие разрешения, заданное заранее, удовлетворяется в состоянии, в котором выполняется управление поддержанием остановки транспортного средства для того, чтобы формировать тормозную силу, допускающую поддержание состояния остановки транспортного средства, даже когда из состояния, в котором транспортное средство остановлено посредством операции нажатия тормоза водителем, водитель уменьшает операцию нажатия педали тормоза; и
- уведомляют водителя об информации зажигания для указания, что состояние переключателя зажигания является включенным, когда парковочный тормоз приводится в действие в то время, когда двигатель автоматически остановлен; при этом
условие разрешения включает в себя условие, при котором состояние операции нажатия тормоза водителем представляет собой первое рабочее состояние тормоза, заданное заранее,
рабочее условие для того, чтобы выполнять управление поддержанием остановки транспортного средства, включает в себя условие, при котором состояние операции нажатия тормоза водителем представляет собой второе рабочее состояние тормоза, заданное заранее, и
рабочая величина операции нажатия тормоза водителем, включенная в первое рабочее состояние тормоза, превышает рабочую величину, включенную во второе рабочее состояние тормоза.
2. Способ управления глушением двигателя на холостом ходу по п. 1, в котором автоматически остановленный двигатель повторно запускается, чтобы начинать уведомление относительно информации зажигания, указывающее водителю включенное состояние переключателя зажигания.
3. Способ управления глушением двигателя на холостом ходу по п. 2, в котором автоматически остановленный двигатель повторно запускается только тогда, когда выбирается диапазон отсутствия приведения в движение.
4. Устройство управления глушением двигателя на холостом ходу, содержащее:
- модуль управления автоматической остановкой, выполненный с возможностью автоматически останавливать двигатель транспортного средства, когда условие разрешения, заданное заранее, удовлетворяется в состоянии, в котором управление поддержанием остановки транспортного средства для того, чтобы формировать тормозную силу, допускающую поддержание состояния, в котором состояние остановки транспортного средства даже когда из состояния, в котором транспортное средство остановлено посредством операции нажатия тормоза водителем, водитель уменьшает операцию нажатия педали тормоза, и уведомлять водителя об информации зажигания для указания, что состояние переключателя зажигания является включенным, когда парковочный тормоз приводится в действие в то время, когда двигатель автоматически остановлен; при этом
условие разрешения включает в себя условие, при котором состояние операции нажатия тормоза водителем представляет собой первое рабочее состояние тормоза, заданное заранее,
рабочее условие для того, чтобы выполнять управление поддержанием остановки транспортного средства, включает в себя условие, при котором состояние операции нажатия тормоза водителем представляет собой второе рабочее состояние тормоза, заданное заранее, и
рабочая величина операции нажатия тормоза водителем, включенная в первое рабочее состояние тормоза, превышает рабочую величину, включенную во второе рабочее состояние тормоза.
| JP 2006342777 A, 21.12.2006 | |||
| WO 2015075533 A1, 28.05.2015 | |||
| EP 1612408 A1, 04.01.2006 | |||
| RU 2013123044 A, 27.11.2014 | |||
| RU 2012115995 A, 27.10.2013. |

