Область техники
Настоящее изобретение относится к способу управления двигателем и к устройству управления движением транспортного средства.
Уровень техники
В документе JP 2015-68413 А раскрыто устройство для управления транспортным средством, причем это устройство, когда условие остановки удовлетворяется в ходе движения, начинает инерционное движение, в ходе которого транспортное средство движется при поддержании остановки двигателя, и, когда удовлетворяется условие повторно запускать двигатель, повторно запускает двигатель посредством использования стартерного устройства.
Техническая задача
Вращение двигателей не прекращается немедленно даже после начала движения накатом, и двигатель вращается по инерции. Когда условие прекращать инерционное движение удовлетворяется в ходе этого инерционного вращения, шум, сформированный посредством двигателя, проворачиваемого в ходе инерционного вращения, может вызывать у водителя ощущение дискомфорта.
Цель настоящего изобретения заключается в том, чтобы создать способ управления двигателем и устройство управления движением транспортного средства, которые позволяют не допускать возникновения у водителя ощущения дискомфорта от шума, обусловленного посредством проворачивания двигателя в ходе его инерционного вращения, когда условие прекращать инерционное движение удовлетворяется в ходе инерционного вращения.
Решение задачи
Согласно аспекту настоящего изобретения, создан способ управления двигателем, включающий в себя: определение намерения водителя для ускорения в ходе движения транспортного средства; прекращение подачи топлива в двигатель, когда определяется то, что водитель не имеет намерения для ускорения; разрешение повторного запуска двигателя, когда определяется то, что водитель имеет намерение для ускорения после прекращения подачи топлива в двигатель; запрет повторного запуска двигателя до тех пор, пока частота вращения двигателя не упадет до или ниже заданного порогового значения частоты вращения, даже когда разрешается повторный запуск двигателя; и повторный запуск двигателя после того, как частота вращения двигателя падает до или ниже заданного порогового значения частоты вращения.
Краткое описание чертежей
Фиг. 1 является схемой принципиальной конфигурации транспортного средства, оснащенного устройством управления движением транспортного средства согласно первому варианту осуществления;
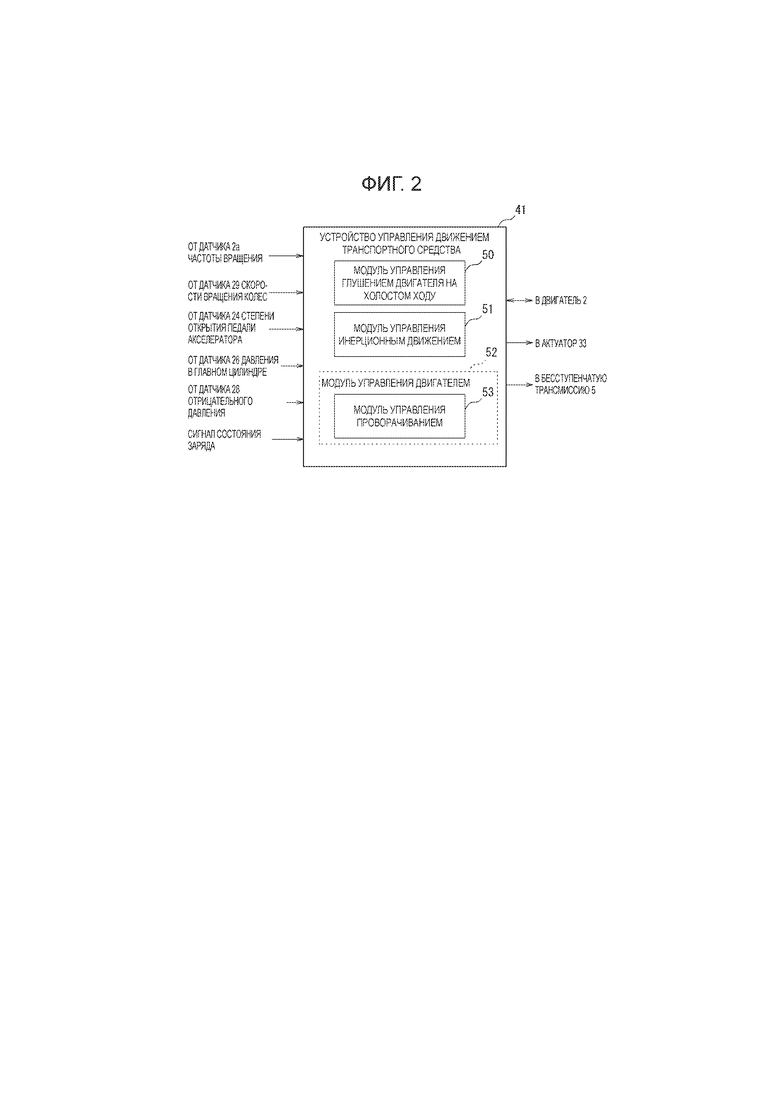
Фиг. 2 является схемой функциональной конфигурации устройства управления движением транспортного средства согласно первому варианту осуществления;
Фиг. 3 является блок-схемой последовательности операций способа, поясняющей первый пример обработки посредством устройства управления движением транспортного средства;
Фиг. 4 является схемой функциональной конфигурации устройства управления движением транспортного средства согласно второму варианту осуществления;
Фиг. 5A и 5B являются пояснительными чертежами первого примера задания порогового значения частоты вращения;
Фиг. 6 является блок-схемой последовательности операций способа, поясняющей второй пример обработки посредством устройства управления движением транспортного средства;
Фиг. 7a-7d являются временными диаграммами, поясняющими первый пример работы устройства управления движением транспортного средства;
Фиг. 8A-8D являются временными диаграммами, поясняющими второй пример работы устройства управления движением транспортного средства;
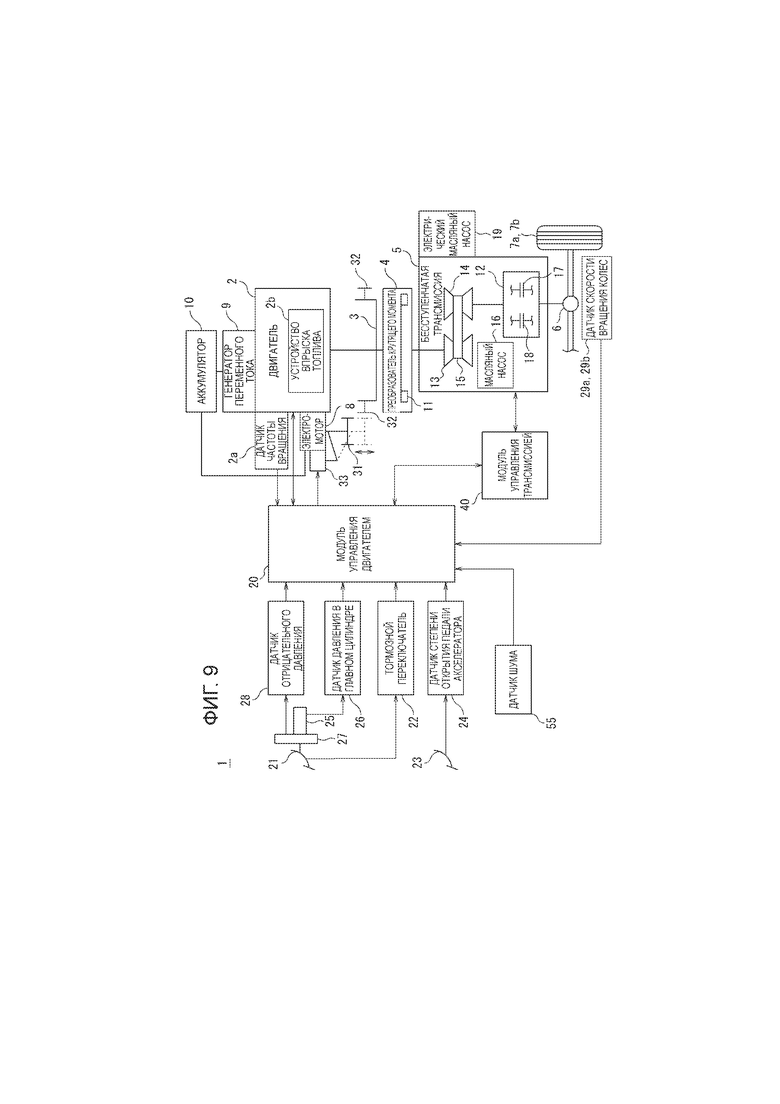
Фиг. 9 является схемой принципиальной конфигурации транспортного средства, оснащенного устройством управления движением транспортного средства согласно примеру модификации;
Фиг. 10 является схемой функциональной конфигурации устройства управления движением транспортного средства согласно третьему варианту осуществления;
Фиг. 11 является схемой принципиальной конфигурации транспортного средства, оснащенного устройством управления движением транспортного средства согласно четвертому варианту осуществления; и
Фиг. 12A является пояснительным чертежом второго примера задания порогового значения частоты вращения, и фиг. 12B является пояснительным чертежом третьего примера задания порогового значения частоты вращения.
Подробное описание вариантов осуществления изобретения
Далее описываются варианты осуществления настоящего изобретения со ссылкой на чертежи.
Первый вариант осуществления
Конфигурация
Ниже описывается устройство управления инерционным движением согласно первому варианту осуществления. См. фиг. 1. Двигатель 2, который представляет собой двигатель внутреннего сгорания транспортного средства 1, содержит преобразователь 4 крутящего момента на стороне выходного вала двигателя. Преобразователь 4 крутящего момента соединяется с ременной бесступенчатой трансмиссией 5 на стороне выходного вала преобразователя. Вращающая движущая сила, выводимая из двигателя 2, вводится через ведущий диск 3 в преобразователь 4 крутящего момента, из которого сила дополнительно вводится в бесступенчатую трансмиссию 5. Вращающая движущая сила, вводимая в бесступенчатую трансмиссию 5, изменяется согласно требуемому передаточному отношению и затем передается через дифференциальную передачу 6 на ведущие колеса 7a и 7b. Двигатель 2 содержит электромотор 8 для запуска двигателя, генератор 9 переменного тока для выработки электрической мощности и аккумулятор 10.
Преобразователь 4 крутящего момента усиливает крутящий момент в ходе движения на низкой скорости. Преобразователь 4 крутящего момента имеет блокировочную муфту 11. Когда скорость V транспортного средства 1 равна или выше заданной скорости V1, преобразователь 4 крутящего момента зацепляет блокировочную муфту 11, чтобы регулировать относительное вращение между выходным валом двигателя 2 и входным валом бесступенчатой трансмиссии 5. Заданная скорость V1 может составлять, например, 14 км/ч.
Бесступенчатая трансмиссия 5 содержит механизм 12 переключения переднего/заднего хода, первичный шкив 13 и вторичный шкив 14 и ремень 15, заданный для первичного шкива 13 и вторичного шкива 14. Ширины углублений первичного шкива 13 и вторичного шкива 14 варьируются посредством гидравлического управления, чтобы достигать требуемого передаточного отношения.
Механизм 12 переключения переднего/заднего хода содержит муфту 17 переднего хода и тормоз 18 заднего хода. Муфта 17 переднего хода и тормоз 18 заднего хода представляют собой фрикционные зацепляющие элементы для передачи вращения, передаваемого из вторичного шкива 14, в положительном направлении (прямом направлении) и в отрицательном направлении (обратное направление), соответственно. Муфта 17 переднего хода и тормоз 18 заднего хода являются примерами муфты, которые передают движущую силу двигателя 2 на ведущие колеса 7a и 7b.
Помимо этого, в бесступенчатой трансмиссии 5 предоставляется масляный насос 16, приводимый в действие посредством двигателя 2. Когда двигатель работает, масляный насос 16, в качестве гидравлического источника, подает давление преобразователя для преобразователя 4 крутящего момента и давление муфты для блокировочной муфты 11.
Дополнительно, масляный насос 16, в качестве гидравлического источника, подает давление шкива бесступенчатой трансмиссии 5 и давление зацепления муфты для муфты 17 переднего хода и тормоза 18 заднего хода. Еще дополнительно, бесступенчатая трансмиссия 5 содержит электрический масляный насос 19, в дополнение к масляному насосу 16, и выполнена с возможностью допускать подачу требуемого давления масла в каждый актуатор посредством активации электрического масляного насоса 19, когда автоматическая остановка двигателя делает гидравлическую подачу посредством масляного насоса 16 невозможной. Таким образом, утечка гидравлического масла может компенсироваться, и давление зацепления муфты может поддерживаться даже во время остановки двигателя.
Рабочее состояние двигателя 2 управляется посредством модуля 20 управления двигателем. В модуль 20 управления двигателем вводится сигнал частоты вращения, указывающий частоту Re вращения двигателя, от датчика 2a частоты вращения для определения частоты Re вращения двигателя для двигателя 2. Датчик 2a частоты вращения является одним примером устройства определения частоты вращения двигателя для определения частоты Re вращения двигателя для двигателя 2.
Дополнительно, в модуль 20 управления двигателем вводится тормозной сигнал из тормозного переключателя 22 для вывода сигнала включения согласно операции нажатия педали тормоза 21 водителем. Педаль 21 тормоза является одним примером функционального элемента, управляемого водителем с возможностью выдавать инструкции по тормозной силе транспортного средства 1.
Главный цилиндр 25 и главный вакуумный усилитель 27 предоставляются перед педалью 21 тормоза. Главный вакуумный усилитель 27 усиливает рабочую тормозную силу посредством использования отрицательного давления на впуске двигателя 2. Модуль 20 управления двигателем принимает сигнал величины срабатывания педали тормоза от датчика 26 давления в главном цилиндре для определения давления в главном цилиндре главного цилиндра 25, сформированного на основе величины срабатывания педали 21 тормоза. Дополнительно, модуль 20 управления двигателем принимает сигнал отрицательного давления от датчика 28 отрицательного давления для определения отрицательного давления главного вакуумного усилителя 27.
Другой датчик, к примеру, датчик для определения степени хода педали тормоза и силы нажатия педали тормоза или датчик для определения давления в колесном тормозном цилиндре, может использоваться, вместо датчика 26 давления в главном цилиндре, для того чтобы определять величину срабатывания педали тормоза, которая вводится в модуль 20 управления двигателем.
Дополнительно, модуль 20 управления двигателем принимает сигнал величины срабатывания педали акселератора от датчика 24 степени открытия педали акселератора для определения величины срабатывания педали 23 акселератора, управляемой водителем. Педаль 23 акселератора является одним примером функционального элемента, управляемого водителем с возможностью выдавать инструкции по движущей силе транспортного средства 1. Датчик 24 степени открытия педали акселератора является одним примером устройства определения степени нажатия педали акселератора для определения степени нажатия педали акселератора, которая является степенью нажатия педали акселератора 23 водителем.
Еще дополнительно, модуль 20 управления двигателем принимает сигналы скорости вращения колес, указывающие скорости вращения колес, определенные посредством датчиков 29a и 29b скорости вращения колес, предоставленных на ведущих колесах 7a и 7b. В нижеприведенном пояснении, датчики 29a и 29b скорости вращения колес могут совместно представляться в качестве "датчиков 29 скорости вращения колес". Датчики 29 скорости вращения колес могут предоставляться на колесах, отличных от ведущих колес. В дальнейшем в этом документе, ведущие колеса 7a и 7b и колеса, отличные от ведущих колес, могут совместно представляться в качестве "колес 7".
Еще дополнительно, модуль 20 управления двигателем принимает сигнал состояния трансмиссии из модуля 40 управления трансмиссией, который описывается ниже, и сигналы температуры воды в двигателе, угла поворота коленчатого вала и т.п.
Модуль 20 управления двигателем управляет, на основе вышеуказанных различных сигналов, устройством 2b впрыска топлива, которое предоставляется d двигателе 2 и допускает регулирование топлива, которое должно подаваться в двигатель 2. Таким образом, модуль 20 управления двигателем является одним примером устройства управления для управления устройством 2b впрыском топлива. Дополнительно, модуль 20 управления двигателем запускает двигатель 2 и выполняет обработку автоматической остановки двигателя 2, которая описывается ниже, на основе вышеуказанных различных сигналов.
При запуске двигателя 2, модуль 20 управления двигателем проворачивает двигатель посредством использования электромотора 8. Электромотор 8, например, может представлять собой стартерный электромотор для запуска двигателя (т.е. пусковой электромотор). Таким образом, модуль 20 управления двигателем является одним примером устройства управления для управления электромотором 8.
Модуль 20 управления двигателем, в ходе проворачивания, перемещает ведущую шестерню 31, закрепленную на ведущем валу электромотора 8, из первой позиции, в которой шестерня расцеплена от коронной шестерни 32, закрепленной на периметре ведущего диска, 3 во вторую позицию, в которой шестерня зацепляется с коронной шестерней 32. Электромотор 8 содержит актуатор 33 для перемещения ведущей шестерни 31 между первой и второй позициями.
Например, когда модуль 20 управления двигателем подает питание в актуатор 33, ведущая шестерня 31 передвигается из первой позиции во вторую позицию, и когда в актуатор 33 не подается питание, ведущая шестерня 31 возвращается из второй позиции в первую позицию. При поддержании зацепления ведущей шестерни 31 с коронной шестерней 32, двигатель проворачивается посредством вращения электромотора 8, в который подается электроэнергия от аккумулятора 10. Затем устройство 2b впрыска топлива впрыскивает топливо в двигатель 2, и после того, как двигатель 2 достигает своего самоподдерживающегося вращения, электромотор 8 останавливается. Генератор 9 переменного тока, вращательно приводимый в действие посредством двигателя 2, вырабатывает электрическую мощность, которая подается в устройство, такое как аккумулятор 10. Коронная шестерня 32 является одним примером первой шестерни на стороне двигателя 2. Ведущая шестерня 31 является одним примером второй шестерни на стороне электромотора 8.
Модуль 40 управления трансмиссией принимает сигнал состояния двигателя, указывающий состояние работы двигателя, из модуля 20 управления двигателем и отправляет сигнал состояния трансмиссии, указывающий состояние бесступенчатой трансмиссии 5, в модуль 20 управления двигателем. Модуль 40 управления трансмиссией управляет, например, передаточным отношением бесступенчатой трансмиссии 5, на основе этих сигналов.
Например, модуль 40 управления трансмиссией, когда выбирается D-диапазон, зацепляет муфту 17 переднего хода и дополнительно определяет передаточное отношение из карты передаточных отношений на основе степени открытия педали акселератора и скорости V, чтобы управлять давлением каждого шкива.
Дополнительно, когда скорость V меньше заданной скорости V1, модуль управления трансмиссией расцепляет блокировочную муфту 11, но когда скорость, в общем, равна или превышает заданную скорость V1, модуль управления трансмиссией зацепляет блокировочную муфту, чтобы переводить двигатель 2 и бесступенчатую трансмиссию 5 в непосредственно соединенное состояние.
Модуль 20 управления двигателем и модуль 40 управления трансмиссией, например, могут представлять собой компьютеры, включающие в себя CPU (центральный процессор) и периферийный компонент для CPU, такой как устройство хранения данных. Соответствующие функции этих компьютеров, описанных в данном документе, реализуются посредством соответствующих CPU, выполняющих компьютерные программы, сохраненные в устройствах хранения данных.
Обработка автоматической остановки двигателя
Далее поясняется обработка автоматической остановки двигателя 2. Обработка автоматической остановки представляет собой обработку, в которой модуль 20 управления двигателем останавливает и повторно запускает двигатель 2 автоматически, когда заданные условия удовлетворяются, соответственно. С этой целью, модуль 20 управления двигателем, модуль 40 управления трансмиссией, электромотор 8, датчик 2a частоты вращения, устройство 2b впрыска топлива, датчик 24 степени открытия акселератора и датчики 29 скорости вращения колес конфигурируют устройство 41 управления движением транспортного средства, которое выполняет обработку автоматической остановки двигателя 2.
Как показано на фиг. 2, устройство 41 управления движением транспортного средства содержит модуль 50 управления глушением двигателя на холостом ходу, модуль 51 управления инерционным движением и модуль 52 управления двигателем. Модуль 50 управления глушением двигателя на холостом ходу выполняет так называемое управление глушением двигателя на холостом ходу (также называемое снижением числа оборотов в режиме холостого хода), которое прекращает холостой ход двигателя, когда заданное условие удовлетворяется в то время, когда транспортное средство 1 остановлено. Подробное описание управления глушением двигателя на холостом ходу опускается.
Модуль 51 управления инерционным движением прекращает подачу топлива в двигатель 2, разъединяет двигатель 2 от ведущих колес 7a и 7b и обеспечивает работу транспортного средства 1 как есть, когда заданное условие первого инерционного движения удовлетворяется, даже если скорость V равна или выше порогового значения V2 скорости, которое превышает заданную скорость V1. В данном документе, представление "первое инерционное движение" означает движение, в ходе которого скорость V равна или выше порогового значения V2 скорости, подача топлива в двигатель 2 поддерживается прекращенной, и двигатель 2 поддерживается разъединенным от ведущих колес 7a и 7b. Дополнительно, "нормальное движение" означает движение, в ходе которого муфта 17 переднего хода поддерживается зацепленной, другими словами, двигатель 2 поддерживается зацепленным с ведущими колесами 7a и 7b, и топливо продолжает подаваться в двигатель 2.
Модуль 51 управления инерционным движением принимает сигналы скорости вращения колес от датчиков 29 скорости вращения колес, сигнал величины срабатывания педали акселератора от датчика 24 степени открытия педали акселератора, сигнал величины срабатывания педали тормоза от датчика 26 давления в главном цилиндре, сигнал отрицательного давления от датчика 28 отрицательного давления и сигнал состояния заряда от аккумулятора 10. Модуль 51 управления инерционным движением определяет то, удовлетворяется или нет условие первого инерционного движения, на основе сигналов скорости вращения колес, сигнала величины срабатывания педали акселератора и сигнала состояния заряда.
Условие первого инерционного движения удовлетворяется, например, когда удовлетворяются все следующие четыре условия (A1)-(A4).
(A1) Скорость V равна или выше порогового значения V2 скорости. Пороговое значение V2 скорости может составлять приблизительно 30 км/ч.
(A2) Скорость V равна или ниже скорости V3. Согласно примеру, скорость V3 может составлять приблизительно 80 км/ч.
(A3) Водитель не имеет намерения для ускорения. Например, когда время, превышающее заданное время, истекает после того, как величина срабатывания педали акселератора (т.е. степень нажатия педали акселератора) падает до нуля, может определяться, что условие (A3) удовлетворяется. Заданное время представляет собой период, в течение которого педаль 23 акселератора не нажимается, причем период задается, чтобы определять то, что водитель не имеет намерения для ускорения, и он может составлять, например, 2 секунды.
(A4) Заданное условие разрешения глушения двигателя на холостом ходу удовлетворяется. Условие разрешения глушения двигателя на холостом ходу, например, может заключаться в том, что двигатель не прогревается, и в том, что коэффициент заряда аккумулятора 10 равен или выше заданного значения.
Модуль 51 управления инерционным движением разрешает первое инерционное движение и выводит команду остановки двигателя в модуль 52 управления двигателем, когда условие первого инерционного движения удовлетворяется, другими словами, когда водитель не имеет намерения для ускорения, и другие условия (A1), (A2) и (A4) удовлетворяются.
Модуль 52 управления двигателем прекращает впрыск топлива посредством устройства 2b впрыска топлива, чтобы прекращать подачу топлива в двигатель 2. Дополнительно, модуль 52 управления двигателем выводит команду запрета на работу для электрического масляного насоса 19 в бесступенчатую трансмиссию 5. Поскольку масляный насос 16 останавливается вследствие остановки двигателя 2, и помимо этого, электрический масляный насос 19 не работает, муфта 17 переднего хода в механизме 12 переключения переднего/заднего хода расцепляется. Как результат, двигатель 2 расцепляется от ведущих колес 7a и 7b. Помимо этого, блокировочная муфта 11 также расцепляется.
Дополнительно, в ходе первого инерционного движения, модуль 51 управления инерционным движением определяет то, удовлетворяется или нет заданное первое условие остановки, на основе сигналов скорости вращения колес, сигнала величины срабатывания педали акселератора и сигнала состояния заряда. Когда первое условие остановки удовлетворяется, модуль 51 управления инерционным движением запрещает первое инерционное движение, чтобы прекращать первое инерционное движение. Первое условие остановки удовлетворяется, когда, например, удовлетворяется любое из следующих трех условий (B1)-(B3).
(B1) Скорость V ниже порогового значения V2 скорости.
(B2) Водитель имеет намерение для ускорения. Например, может определяться, что условие (B2) удовлетворяется, когда нажимается педаль 23 акселератора.
(B3) Условие разрешения глушения двигателя на холостом ходу не удовлетворяется.
Когда первое условие остановки удовлетворяется, например, когда водитель имеет намерение для ускорения, модуль 51 управления инерционным движением прекращает первое инерционное движение и выводит команду повторного запуска с помощью электромотора 8 в модуль 52 управления двигателем.
После приема команды повторного запуска, модуль 52 управления двигателем выполняет проворачивание двигателя посредством использования электромотора 8. В этом случае, двигатель 2 может выполнять инерционное вращение при переходе в остановленное состояние. Примеры такого состояния включают в себя изменение намерений (CoM) таким образом, что операция ускорения выполняется водителем сразу после того, как начинается первое инерционное движение.
Когда проворачивание выполняется в ходе инерционного вращения двигателя 2, возникает шум, который вызывается посредством зацепления ведущей шестерни 31 с вращающейся коронной шестерней 32. В нижеприведенном пояснении, представление "шум стартера" означает шум, вызываемый посредством зацепления ведущей шестерни 31 с вращающейся коронной шестерней 32. Шум стартера увеличивается, когда частота Re вращения двигателя является более высокой.
Затем модуль 52 управления двигателем разрешает проворачивание двигателя 2 посредством использования электромотора 8, когда частота Re вращения двигателя для двигателя 2 в ходе инерционного вращения равна или ниже порогового значения Tr частоты вращения. Другими словами, модуль разрешает повторный запуск двигателя 2. Когда частота Re вращения двигателя выше порогового значения Tr частоты вращения, модуль запрещает проворачивание двигателя 2 посредством использования электромотора 8 до тех пор, пока частота Re вращения двигателя не упадет до или ниже порогового значения Tr частоты вращения. Другими словами, модуль управления двигателем запрещает повторный запуск двигателя 2. Модуль управления двигателем выполняет проворачивание двигателя 2 после того, как частота Re вращения двигателя падает до или ниже порогового значения Tr частоты вращения. Другими словами, модуль повторно запускает двигатель 2.
Модуль 52 управления двигателем содержит модуль 53 управления проворачиванием. Модуль 53 управления проворачиванием определяет частоту Re вращения двигателя на основе сигнала частоты вращения от датчика 2a частоты вращения. Модуль 53 управления проворачиванием разрешает проворачивание двигателя 2 посредством использования электромотора 8 и начинает проворачивание, когда частота Re вращения двигателя равна или меньше порогового значения Tr частоты вращения.
Модуль 53 управления проворачиванием подает питание в актуатор 33, чтобы зацеплять ведущую шестерню 31 с коронной шестерней 32, и приводит в действие электромотор 8, чтобы проворачивать двигатель 2. Модуль 52 управления двигателем повторно начинает впрыск топлива посредством устройства 2b впрыска топлива двигателя 2. Двигатель 2 повторно запускается посредством повторного начала впрыска топлива и проворачивания.
После того, как двигатель 2 повторно запускается, масляный насос 16 работает с возможностью зацеплять муфту 17 переднего хода в механизме 12 переключения переднего/заднего хода.
Когда частота Re вращения двигателя выше порогового значения Tr частоты вращения, модуль 53 управления проворачиванием запрещает проворачивание двигателя 2 посредством использования электромотора 8 до тех пор, пока частота Re вращения двигателя не упадет до или ниже порогового значения Tr частоты вращения.
Затем, когда определяется то, что транспортное средство 1 выполняет замедление и с большой вероятностью должно останавливаться через управление, называемое "управлением отсечкой топлива при замедлении", и переходить к управлению глушением двигателя на холостом ходу, подача топлива в двигатель 2 прекращается. В этом случае, транспортное средство 1 движется посредством инерции, при этом педаль 23 акселератора не нажимается водителем. Представление "второе инерционное движение" означает движение, в ходе которого подача топлива в двигатель 2 поддерживается прекращенной, когда определяется то, что транспортное средство с большой вероятностью должно переходить к управлению глушением двигателя на холостом ходу. Первое инерционное движение и второе инерционное движение могут совместно представляться в качестве "инерционного движения". Второе инерционное движение может называться движением в ходе глушения двигателя при движении по инерции, и управление для прекращения подачи топлива в двигатель 2 во время движения в ходе глушения двигателя при движении по инерции может называться управлением глушением двигателя при движении по инерции.
Хотя впрыск топлива поддерживается прекращенным в ходе управления отсечкой топлива при замедлении, частота Re вращения двигателя поддерживается посредством крутящего момента при движении по инерции, передаваемого через блокировочную муфту 11 из ведущих колес 7a и 7b. Тем не менее, поскольку блокировочная муфта 11 расцепляется после замедления до заданной скорости V1, двигатель 2 должен останавливаться, если топливо не впрыскивается в него. По этой причине, в традиционных технологиях, управление отсечкой топлива при замедлении прекращается во время расцепления блокировочной муфты 11, и впрыск топлива повторно начинается, чтобы поддерживать самоподдерживающееся вращение двигателя; холостой ход двигателя затем прекращается после того, как транспортное средство 1 полностью останавливается. Тем не менее, эффективность использования топлива может повышаться, если объем топлива после повторного начала впрыска топлива дополнительно может уменьшаться в процессе, в котором впрыск топлива временно повторно начинается после такого состояния движения, при этом впрыск топлива поддерживается прекращенным, и после этого двигатель снова останавливается. Соответственно, когда заданное условие второго инерционного движения удовлетворяется, двигатель 2 поддерживается прекращенным без повторного начала впрыска топлива, и после того, как транспортное средство 1 останавливается, оно переходит непосредственно к нормальному управлению глушением двигателя на холостом ходу.
Модуль 51 управления инерционным движением определяет то, удовлетворяется или нет условие второго инерционного движения, на основе сигнала величины срабатывания педали акселератора, сигнала величины срабатывания педали тормоза и сигнала состояния заряда. Условие второго инерционного движения удовлетворяется, например, когда удовлетворяются все следующие три условия (C1)-(C3).
(C1) Величина срабатывания педали тормоза равна или выше заданного значения.
(C2) Величина срабатывания педали акселератора равна нулю.
(C3) Условие разрешения глушения двигателя на холостом ходу удовлетворяется.
Когда условие второго инерционного движения удовлетворяется, модуль 51 управления инерционным движением выводит команду остановки двигателя в модуль 52 управления двигателем. При автоматической остановке двигателя 2, бесступенчатая трансмиссия 5 активирует электрический масляный насос 19, чтобы поддерживать зацепление муфты 17 переднего хода механизма 12 переключения переднего/заднего хода. Таким образом, зацепление двигателя 2 с ведущими колесами 7a и 7b поддерживается. Поскольку второе инерционное движение начинается после управления отсечкой топлива при замедлении, скорость V в ходе второго инерционного движения ниже заданной скорости V1.
В ходе второго инерционного движения, модуль 51 управления инерционным движением определяет то, удовлетворяется или нет заданное второе условие остановки, на основе сигнала отрицательного давления и сигнала состояния заряда. Когда второе условие остановки удовлетворяется, модуль 51 управления инерционным движением запрещает второе инерционное движение и прекращает второе инерционное движение. Второе условие остановки удовлетворяется, например, когда удовлетворяется любое из следующих двух условий (D1) и (D2).
(D1) Отрицательное давление главного вакуумного усилителя 27 меньше заданного значения.
(D2) Условие разрешения глушения двигателя на холостом ходу не удовлетворяется.
Когда второе условие остановки удовлетворяется, модуль 51 управления инерционным движением выводит команду повторного запуска в модуль 52 управления двигателем. Модуль 52 управления двигателем, после приема команды повторного запуска, проворачивает двигатель посредством использования электромотора 8.
Модуль 52 управления двигателем может разрешать проворачивание двигателя 2 посредством использования электромотора 8, когда частота Re вращения двигателя равна или меньше порогового значения Tr частоты вращения, аналогично случаю проворачивания в конце первого инерционного движения. Дополнительно, когда частота Re вращения двигателя выше порогового значения Tr частоты вращения, модуль 52 управления двигателем может запрещать проворачивание двигателя 2 посредством использования электромотора 8 до тех пор, пока частота Re вращения двигателя не упадет до или ниже порогового значения Tr частоты вращения.
Как описано выше, модуль 51 управления инерционным движением может повышать эффективность использования топлива транспортного средства 1 посредством увеличения периода остановки двигателя посредством первого инерционного движения и второго инерционного движения.
Работа
Далее поясняется первый пример обработки устройства 41 управления движением транспортного средства. См. фиг. 3. На этапе S1, модуль 51 управления инерционным движением определяет то, удовлетворяется или нет первое условие остановки. Когда первое условие остановки удовлетворяется (этап S1: Y), обработка переходит к этапу S2. Когда первое условие остановки не удовлетворяется (этап S1: N), обработка завершается.
На этапе S2, модуль 53 управления проворачиванием определяет то, прекращается или нет вращение двигателя 2, на основе сигнала частоты вращения от датчика 2a частоты вращения. Когда вращение двигателя 2 прекращается (этап S2: Y), обработка переходит к этапу S4. Когда вращение двигателя 2 не прекращается (этап S2: N), обработка переходит к этапу S3.
На этапе S3, модуль 53 управления проворачиванием определяет то, равна или меньше либо нет частота Re вращения двигателя порогового значения Tr частоты вращения.
Когда частота Re вращения двигателя ниже порогового значения Tr частоты вращения (этап S3: Y), обработка переходит к этапу S4. Когда частота Re вращения двигателя выше порогового значения Tr частоты вращения (этап S3: N), обработка возвращается к этапу S3.
На этапе S4, модуль 53 управления проворачиванием начинает проворачивание коленчатого вала двигателя 2 посредством использования электромотора 8. Модуль 52 управления двигателем повторно начинает впрыск топлива посредством устройства 2b впрыска топлива. Двигатель 2 повторно запускается посредством повторного начала впрыска топлива и проворачивания.
Преимущество первого варианта осуществления
(1) Модуль 51 управления инерционным движением в первом варианте осуществления определяет намерение водителя для ускорения в ходе движения транспортного средства 1. Модуль 52 управления двигателем прекращает подачу топлива в двигатель 2 посредством устройства 2b впрыска топлива, когда определяется то, что водитель не имеет намерения для ускорения. Модуль 51 управления инерционным движением разрешает повторный запуск двигателя 2, когда определено, после того, как подача топлива в двигатель 2 прекращается, то, что водитель имеет намерение для ускорения.
Тем не менее, модуль 53 управления проворачиванием запрещает повторный запуск двигателя до тех пор, пока частота Re вращения двигателя не упадет до или ниже порогового значения Tr частоты вращения, даже когда модуль 51 управления инерционным движением разрешает повторный запуск двигателя 2. Другими словами, модуль 53 управления проворачиванием запрещает повторный запуск двигателя до тех пор, пока частота Re вращения двигателя не упадет до или ниже порогового значения Tr частоты вращения, даже когда определяется то, что водитель имеет намерение для ускорения после того, как подача топлива в двигатель 2 прекращается. Модуль 53 управления проворачиванием повторно запускает двигатель 2 после того, как частота Re вращения двигателя падает до или ниже порогового значения Tr частоты вращения.
Соответственно, когда условие для прекращения инерционного движения удовлетворяется в ходе инерционного вращения, можно не допускать возникновения у водителя ощущения дискомфорта от шума, обусловленного посредством проворачивания двигателя в ходе инерционного вращения.
Хотя время проворачивания двигателя 2 задерживается, период, в течение которого проворачивание двигателя 2 запрещается, истекает в пределах периода, требуемого для переключения передач бесступенчатой трансмиссии 5. Соответственно, даже когда проворачивание задерживается, оно не влияет отклик.
Пример модификации
(1) Электромотор 8 может представлять собой электромотор с SSG (с раздельным стартером-генератором), предоставленный отдельно от стартерного электромотора. Проворачивание, выполняемое в ходе инерционного вращения, приводит к шуму, обусловленному посредством люфта системы трансмиссии, передающей вращающую движущую силу между ведущим валом SSG и ведущим валом двигателя 2, и этот шум увеличивается с увеличением частоты Re вращения двигателя. Следовательно, даже в случае SSG, можно не допускать возникновения у водителя ощущения дискомфорта от шума при проворачивании в ходе движения на низкой скорости посредством запрета проворачивания двигателя 2 за счет использования SSG, когда частота Re вращения двигателя выше порогового значения Tr частоты вращения.
(2) Устройство 41 управления движением транспортного средства также может применяться к транспортным средствам, приспосабливающим автоматическую трансмиссию типа, отличного от бесступенчатой трансмиссии 5. Например, устройство 41 управления движением транспортного средства также может применяться к транспортным средствам, приспосабливающим автоматическую трансмиссию типа с зубчатой парой с параллельной осью. Дополнительно, устройство 41 управления движением транспортного средства может применяться не только к транспортным средствам, содержащим только двигатель внутреннего сгорания в качестве источника приведения в движение, но также и к гибридным транспортным средствам.
(3) В ходе первого инерционного движения, устройство 41 управления движением транспортного средства может выводить, в бесступенчатую трансмиссию 5, сигнал расцепления муфты для активного расцепления муфты 17 переднего хода, вместо команды запрета на работу для электрического масляного насоса 19.
Второй вариант осуществления
Далее поясняется второй вариант осуществления. Шум, воспринимаемый водителем транспортного средства 1, включает в себя фоновый шум, возникающий в ходе движения, в дополнение к шуму стартера. Поскольку фоновый шум включает в себя шум при движении транспортного средства 1, фоновый шум увеличивается с увеличением скорости V. Даже если шум стартера является большим в некоторой степени, он не является значительным, когда скорость V является высокой, и фоновый шум является большим. С другой стороны, даже если шум стартера является небольшим в некоторой степени, он может быть значительным, чтобы вызывать у водителя ощущение дискомфорта, когда скорость V является небольшой, и фоновый шум является небольшим. Другими словами, когда разность (I0-I1), полученная посредством вычитания абсолютной величины I1 фонового шума из абсолютной величины I0 шума стартера, является большой, она может вызывать у водителя ощущение дискомфорта.
По этой причине, модуль 52 управления двигателем определяет пороговое значение Tr частоты вращения согласно скорости V транспортного средства 1, причем пороговое значение является верхним пределом частоты Re вращения двигателя, для которого разрешается проворачивание. Когда частота Re вращения двигателя для двигателя 2 в ходе инерционного вращения равна или ниже порогового значения Tr частоты вращения, определенного согласно скорости V, модуль 52 управления двигателем разрешает проворачивание двигателя 2 посредством использования электромотора 8. Когда частота Re вращения двигателя превышает пороговое значение Tr частоты вращения, определенное согласно скорости V, проворачивание двигателя 2 посредством использования электромотора 8 запрещается до тех пор, пока частота Re вращения двигателя не упадет до или ниже порогового значения Tr частоты вращения.
На фиг. 4 идентичные ссылки с номерами используются для компонентов, идентичных компонентам в первом варианте осуществления. Модуль 52 управления двигателем содержит модуль 54 определения пороговых значений частоты вращения. Модуль 54 определения пороговых значений частоты вращения определяет скорость V транспортного средства 1 на основе сигналов скорости вращения колес от датчиков 29 скорости вращения колес. Модуль 54 определения пороговых значений частоты вращения определяет различные пороговые значения Tr частоты вращения согласно различным скоростям V.
Как показано на фиг. 5A, разность (I0-I1), полученная посредством вычитания абсолютной величины I1 фонового шума из абсолютной величины I0 шума стартера, уменьшается с увеличением скорости V. Например, когда частота Re вращения двигателя составляет "R1", и скорость V составляет "V4", разность (I0-I1) составляет "D1", которое меньше "D2", рассчитанного посредством разности (I0-I1), когда скорость V составляет "V5" ниже "V4".
Разность (I0-I1) увеличивается с увеличением частоты Re вращения двигателя. Например, "D1", рассчитанное посредством разности (I0-I1) для скорости V, равной "V4", и частоты Re вращения двигателя, равной "R1", превышает "D3", рассчитанное посредством разности (I0-I1) для частоты Re вращения двигателя, равной "R2" ниже "R1".
Следовательно, модуль 54 определения пороговых значений частоты вращения задает частоту Re вращения двигателя, при которой разность (I0-I1) составляет заданное допустимое значение Ti на скорости V, определенной на основе сигналов скорости вращения колес от датчиков 29 скорости вращения колес, в качестве порогового значения Tr частоты вращения.
Частота вращения в ходе инерционного вращения, для которого разрешается проворачивание, ограничена посредством кривошипно-шатунного механизма (такого как ведущая шестерня 31 и коронная шестерня 32) для передачи вращающей движущей силы электромотора 8 на ведущий вал двигателя 2. Следовательно, модуль 54 определения пороговых значений частоты вращения может задавать максимальное значение, допустимое для кривошипно-шатунного механизма, равным пороговому значению Tr частоты вращения, когда скорость V равна или выше заданного порогового значения скорости.
Как показано на фиг. 5B, например, когда разность (I0-I1) составляет заданное допустимое значение Ti на скорости V, равной "V4", и частоте Re вращения двигателя, равной "R3", частота R3 вращения двигателя задается в качестве порогового значения Tr частоты вращения. Дополнительно, например, когда разность (I0-I1) составляет заданное допустимое значение Ti на скорости V, равной "V5", и частоте Re вращения двигателя, равной "R4", частота R4 вращения двигателя задается в качестве порогового значения Tr частоты вращения. В этом примере, скорость V4 превышает скорость V5, и частота R3 вращения двигателя выше частоты R4 вращения двигателя. Другими словами, пороговое значение Tr частоты вращения увеличивается с увеличением скорости V.
Когда пороговое значение Tr частоты вращения задается, абсолютная величина каждого шума стартера на каждой частоте Re вращения двигателя и абсолютная величина I1 каждого фонового шума на каждой скорости V измеряются заранее. Далее оцениваются соответствующие разности (I0-I1) для различных комбинаций частоты Re вращения двигателя и скорости V. После этого, такое пороговое значение Tr частоты вращения, при котором разность (I0-I1) составляет допустимое значение Ti, оценивается на основе этих оцененных значений.
Как показано на фиг. 4, модуль 53 управления проворачиванием определяет частоту Re вращения двигателя на основе сигнала частоты вращения от датчика 2a частоты вращения. Модуль 53 управления проворачиванием разрешает проворачивание двигателя 2 посредством использования электромотора 8 и начинает проворачивание, когда частота Re вращения двигателя равна или меньше порогового значения Tr частоты вращения, определенного посредством модуля 54 определения пороговых значений частоты вращения.
Когда частота Re вращения двигателя выше порогового значения Tr частоты вращения, определенного посредством модуля 54 определения пороговых значений частоты вращения, модуль 53 управления проворачиванием запрещает проворачивание двигателя 2 посредством использования электромотора 8 до тех пор, пока частота Re вращения двигателя не упадет до или ниже порогового значения Tr частоты вращения.
Работа
Далее поясняется второй пример обработки устройства 41 управления движением транспортного средства. См. фиг. 6. На этапе S10, модуль 51 управления инерционным движением определяет то, удовлетворяется или нет первое условие остановки. Когда первое условие остановки удовлетворяется (этап S10: Y), обработка переходит к этапу S11. Когда первое условие остановки не удовлетворяется (этап S10: N), обработка завершается.
На этапе S11, модуль 53 управления проворачиванием определяет то, прекращается или нет вращение двигателя 2, на основе сигнала частоты вращения от датчика 2a частоты вращения. Когда вращение двигателя 2 прекращается (этап S11: Y), обработка переходит к этапу S16. Когда вращение двигателя 2 не прекращается (этап S11: N), обработка переходит к этапу S12.
На этапе S12, модуль 54 определения пороговых значений частоты вращения определяет скорость V транспортного средства 1. На этапе S13, модуль 53 управления проворачиванием определяет частоту Re вращения двигателя. На этапе S14, модуль 54 определения пороговых значений частоты вращения определяет пороговое значение Tr частоты вращения. Модуль 54 определения пороговых значений частоты вращения может определять пороговое значение Tr частоты вращения до того, как модуль 53 управления проворачиванием определяет частоту Re вращения двигателя. Другими словами, этап S14 может выполняться перед этапом S13.
На этапе S15, модуль 53 управления проворачиванием определяет то, равна или меньше либо нет частота Re вращения двигателя порогового значения Tr частоты вращения.
Когда частота Re вращения двигателя равна или меньше порогового значения Tr частоты вращения (этап S15: Y), обработка переходит к этапу S16. Когда частота Re вращения двигателя выше порогового значения Tr частоты вращения (этап S15: N), обработка возвращается к этапу S12.
На этапе S16, модуль 53 управления проворачиванием начинает проворачивание коленчатого вала двигателя 2 посредством использования электромотора 8. Модуль 52 управления двигателем повторно начинает впрыск топлива посредством устройства 2b впрыска топлива. Двигатель 2 повторно запускается посредством повторного начала впрыска топлива и проворачивания.
Далее поясняется пример устройства управления движением работы транспортного средства 41 в конце первого инерционного движения. Предполагается, что скорость V является относительно большой, и пороговое значение Tr частоты вращения составляет "Tr1", которое является относительно большим. Реальное пороговое значение Tr частоты вращения варьируется в зависимости от уменьшения скорости V в ходе первого инерционного движения.
Как проиллюстрировано на фиг. 7B, условие первого инерционного движения удовлетворяется во время t1, и первое инерционное движение начинается. Когда двигатель останавливается вследствие начала первого инерционного движения, частота Re вращения двигателя начинает уменьшаться, как проиллюстрировано фиг. 7C, и падает до или ниже Tr1 после времени t2.
Дополнительно, когда педаль 23 акселератора нажимается во время t3, как проиллюстрировано на фиг. 7A, и первое условие остановки удовлетворяется, модуль 51 управления инерционным движением выводит команду повторного запуска для двигателя 2 в модуль 52 управления двигателем.
Поскольку частота Re вращения двигателя ниже порогового значения Tr1 частоты вращения во время t3, модуль 53 управления проворачиванием разрешает проворачивание двигателя 2 посредством использования электромотора 8. Соответственно, электромотор 8 приводится в действие во время t3, как проиллюстрировано на фиг. 7D. Как результат, состояние транспортного средства 1 возвращается к нормальному движению, как проиллюстрировано на фиг. 7B.
Далее предполагается, что пороговое значение Tr частоты вращения составляет "Tr2", которое меньше "Tr1". Когда педаль 23 акселератора нажимается во время t3, как проиллюстрировано на фиг. 8A, и первое условие остановки удовлетворяется, модуль 51 управления инерционным движением выводит команду повторного запуска для двигателя 2 в модуль 52 управления двигателем. Поскольку частота Re вращения двигателя выше порогового значения Tr2 частоты вращения во время t3, как проиллюстрировано на фиг. 8C, модуль 53 управления проворачиванием запрещает проворачивание двигателя 2 посредством использования электромотора 8. Соответственно, электромотор 8 не приводится в действие во время t3, как проиллюстрировано на фиг. 8D.
Дополнительно, когда частота Re вращения двигателя падает до или ниже порогового значения Tr2 частоты вращения во время t4, как проиллюстрировано фиг. 8C, модуль 53 управления проворачиванием разрешает проворачивание двигателя 2 посредством использования электромотора 8. Соответственно, электромотор 8 приводится в действие во время t4, как проиллюстрировано фиг. 8D. Как результат, состояние транспортного средства 1 возвращается к нормальному движению, как проиллюстрировано фиг. 8B.
Преимущество второго варианта осуществления
(1) Во втором варианте осуществления, скорость V определяется для транспортного средства 1 в ходе инерционного движения, которое движется при том, что подача топлива в двигатель 2 по-прежнему прекращена. Модуль 54 определения пороговых значений частоты вращения изменяет пороговое значение Tr частоты вращения в зависимости от определенной скорости V. Модуль 54 определения пороговых значений частоты вращения определяет пороговое значение Tr частоты вращения таким образом, что пороговое значение Tr частоты вращения может увеличиваться с увеличением скорости V. Другими словами, меньшее пороговое значение Tr частоты вращения задается для меньшей скорости V. Таким образом, более низкое пороговое значение Tr частоты вращения задается в ходе движения на низкой скорости, приводя к меньшему шуму при проворачивании. Соответственно, скорость V, обеспечивающая инерционное движение без возникновения у водителя ощущения дискомфорта, обусловленного шумом при проворачивании, может быть расширена до диапазона более низких скоростей. Как результат, когда диапазон скоростей, обеспечивающий инерционное движение, может быть расширен, повышается эффективность использования топлива транспортного средства 1.
(2) Модуль 54 определения пороговых значений частоты вращения задает максимальное значение, допустимое для кривошипно-шатунного механизма двигателя 2, равным пороговому значению Tr частоты вращения для скорости V, равной или выше заданного порогового значения скорости. Когда определенная скорость меньше заданного порогового значения скорости, модуль 54 определения пороговых значений частоты вращения ограничивает пороговое значение Tr частоты вращения значением, меньшим максимального значения. Таким образом, более низкое пороговое значение Tr частоты вращения задается в ходе движения на низкой скорости, приводя к меньшему шуму при проворачивании. Соответственно, скорость V, обеспечивающая инерционное движение без возникновения у водителя ощущения дискомфорта, обусловленного шумом при проворачивании, может быть расширена до диапазона более низких скоростей. Как результат, когда диапазон скоростей, обеспечивающий инерционное движение, может быть расширен, повышается эффективность использования топлива транспортного средства 1.
Пример модификации
Пороговое значение Tr частоты вращения может задаваться, соответственно, не для скорости V, а для абсолютной величины I1 фонового шума. Абсолютная величина I1 фонового шума может измеряться фактически. См. фиг. 9. Транспортное средство 1 может содержать датчик 55 шума для измерения абсолютной величины I1 фонового шума.
Третий вариант осуществления
Далее поясняется третий вариант осуществления. Когда двигатель 2 остановлен, частота Re вращения двигателя постепенно снижается, что приводит к прекращению вращения двигателя 2, но двигатель 2 может вращаться в обратном направлении до полного прекращения вращения. По этой причине, в третьем варианте осуществления, проворачивание посредством электромотора 8 запрещается, когда частота Re вращения двигателя для двигателя 2 в ходе обратного вращения выше порогового значения Tr частоты вращения, отличающегося в зависимости от скорости V.
На фиг. 10 идентичные ссылки с номерами используются для компонентов, идентичных компонентам во втором варианте осуществления. Модуль 52 управления двигателем содержит модуль 56 определения направления вращения для определения того, находится двигатель 2 в режиме прямого вращения или в режиме обратного вращения, на основе сигнала частоты вращения от датчика 2a частоты вращения.
Когда частота Re вращения двигателя для двигателя 2 в ходе прямого вращения равна или меньше первого порогового значения Tr1 частоты вращения, отличающегося в зависимости от скорости V транспортного средства 1, модуль 53 управления проворачиванием разрешает проворачивание, а когда частота Re вращения двигателя выше первого порогового значения Tr1 частоты вращения, модуль запрещает проворачивание до тех пор, пока частота Re вращения двигателя не упадет до или ниже первого порогового значения Tr1 частоты вращения.
Дополнительно, когда частота Re вращения двигателя для двигателя 2 в ходе обратного вращения равна или меньше второго порогового значения Tr2 частоты вращения, отличающегося в зависимости от скорости V, модуль 53 управления проворачиванием разрешает проворачивание, и когда частота Re вращения двигателя выше второго порогового значения Tr2 частоты вращения, модуль запрещает проворачивание до тех пор, пока частота Re вращения двигателя не упадет до или ниже второго порогового значения Tr2 частоты вращения.
Шум при проворачивании, сформированный в ходе обратного вращения двигателя 2, имеет тенденцию превышать шум, который сформирован в ходе его прямого вращения. Соответственно, проворачивание может запрещаться на более низкой частоте Re вращения двигателя в ходе обратного вращения двигателя 2, чем в ходе его прямого вращения. Таким образом, модуль 54 определения пороговых значений частоты вращения может задавать значение равным второму пороговому значению Tr2 частоты вращения для транспортного средства 1, движущегося на скорости V с помощью двигателя 2 в ходе обратного вращения, причем это значение меньше первого порогового значения Tr1 частоты вращения для транспортного средства 1, движущегося на скорости V с помощью двигателя 2 в ходе прямого вращения. Другими словами, когда скорость V, определенная в ходе прямого вращения двигателя 2, является идентичной скорости, определенной в ходе обратного вращения двигателя 2, первое пороговое значение Tr1 частоты вращения превышает второе пороговое значение Tr2 частоты вращения. Например, темп увеличения первого порогового значения Tr1 частоты вращения относительно увеличения скорости V может превышать темп увеличения второго порогового значения Tr2 частоты вращения относительно увеличения скорости V.
Преимущество третьего варианта осуществления
(1) Модуль 56 определения направления вращения в третьем варианте осуществления определяет то, находится двигатель 2 в режиме прямого вращения или в режиме обратного вращения. Модуль 53 управления проворачиванием разрешает повторный запуск двигателя 2, когда частота Re вращения двигателя для двигателя 2 в ходе прямого вращения равна или меньше первого порогового значения Tr1 частоты вращения, отличающегося в зависимости от скорости V транспортного средства 1. Помимо этого, модуль 53 управления проворачиванием разрешает повторный запуск двигателя 2, когда частота Re вращения двигателя для двигателя 2 в ходе обратного вращения равна или меньше второго порогового значения Tr2 частоты вращения, отличающегося в зависимости от скорости V. Соответственно, можно не допускать возникновения у водителя ощущения дискомфорта от шума при проворачивании, возникающего при повторном запуске двигателя 2 в ходе его обратного вращения, возникающего при остановке двигателя 2.
(2) Когда скорость V, определенная в ходе прямого вращения двигателя 2 является идентичной скорости, которая определена в ходе его обратного вращения, первое пороговое значение Tr1 частоты вращения превышает второе пороговое значение Tr2 частоты вращения. Соответственно, проворачивание может запрещаться для более низкой частоты Re вращения двигателя в ходе обратного вращения двигателя 2, чем в ходе его прямого вращения. Как результат, можно не допускать возникновения большего шума при проворачивании в ходе обратного вращения двигателя 2, чем в ходе его прямого вращения.
Четвертый вариант осуществления
Далее поясняется четвертый вариант осуществления. Абсолютная величина шума стартера, воспринимаемого для водителя, колеблется в зависимости от различных факторов. В нижеприведенном пояснении, фактор колебания, который приводит к колебанию абсолютной величины шума стартера, воспринимаемого для водителя, представляется просто в качестве "фактора колебания".
Такой фактор колебания, например, может представлять собой фактор, который формирует шум, отличный от шума стартера, что затрудняет опознавание шума при работе электромотора и приводит к колебанию абсолютной величины шума стартера, воспринимаемого для водителя. Примеры фактора колебания включают в себя, например, погодные условия. Например, дождь увеличивает шум при движении, что затрудняет опознавание шума стартера. По этой причине, абсолютная величина шума стартера, воспринимаемого для водителя, больше в солнечную погоду.
Дополнительно, примеры фактора колебания включают в себя рабочее состояние аудиоустройства и рабочее состояние стеклоочистителя, предоставленного в транспортном средстве 1. Когда аудиоустройство и стеклоочиститель используются, их шумы при работе также запрещают опознавание шума стартера, приводя к увеличению абсолютной величины шума стартера, воспринимаемого для водителя.
Еще дополнительно, примеры фактора колебания также включают в себя рабочее состояние устройства уменьшения уровня шума для уменьшения фонового шума в салоне транспортного средства 1. Поскольку шум стартера является значительным, когда фоновый шум является небольшим, абсолютная величина шума стартера, воспринимаемого для водителя, уменьшается.
По этой причине, устройство 41 управления движением транспортного средства четвертого варианта осуществления корректирует пороговое значение Tr частоты вращения, которое задано согласно скорости V транспортного средства 1 согласно фактору колебания, приводящему к колебанию абсолютной величины шума стартера, воспринимаемого для водителя, в дополнение к скорости V.
На фиг. 11 идентичные ссылки с номерами используются для компонентов, идентичных компонентам во втором варианте осуществления. Транспортное средство 1 содержит датчик 60 для определения текущих погодных условий в позиции транспортного средства 1 и навигационное устройство 61. Датчик 60 определяет погодные условия. Например, датчик 60 может представлять собой датчик дождя для обнаружения дождя или датчик снегопада для обнаружения снегопада. Датчик 60 вводит информацию относительно обнаруженных погодных условий в модуль 20 управления двигателем.
Навигационное устройство 61 представляет собой устройство обработки информации для вывода, в модуль 20 управления двигателем, информации маршрута движения для совместного навигационного управления. При совместном навигационном управлении, модуль 20 управления двигателем управляет скоростью V транспортного средства 1 согласно степени кривизны или уклона дороги впереди, на основе информации маршрута движения. Дополнительно, при совместном навигационном управлении, навигационное устройство 61 принимает, посредством использования устройства 62 связи, информацию о погоде, связанную с настоящими погодными условиями в позиции транспортного средства 1 или на маршруте движения, по которому необходимо ехать. Устройство 62 связи может принимать информацию о погоде через, например, связь между транспортным средством и дорожной инфраструктурой, связь между транспортными средствами или спутниковую связь. Навигационное устройство 61 вводит принимаемую информацию о погоде в модуль 20 управления двигателем.
Транспортное средство 1 также содержит модуль 63 аудиоуправления, имеющий аудиоустройство, такое как проигрыватель компакт-дисков и радиостанция. Модуль 63 аудиоуправления вводит, в модуль 20 управления двигателем, первый управляющий сигнал, указывающий рабочее состояние аудиоустройства и громкость звука, сформированного посредством аудиоустройства.
Дополнительно, транспортное средство 1 содержит стеклоочиститель 64, руль 65, переключатель 66 стеклоочистителя, предоставленный рядом с рулем, и модуль 67 управления кузова транспортного средства. Модуль 67 управления кузова транспортного средства обнаруживает операцию переключателя 66 стеклоочистителя и приводит в действие стеклоочиститель 64 согласно определенной операции. Модуль 67 управления кузова транспортного средства выводит, в модуль 20 управления двигателем, второй управляющий сигнал, указывающий рабочее состояние стеклоочистителя 64.
Помимо этого, транспортное средство 1 содержит модуль 68 управления шумоподавлением в качестве устройства уменьшения уровня шума. Модуль 68 управления шумоподавлением подает, в модуль 63 аудиоуправления, аудиосигнал противофазного звука относительно фонового шума в салоне транспортного средства 1, чтобы выводить противофазный звук из динамика 69, за счет этого уменьшая фоновый шум в салоне. В модуль 20 управления двигателем вводится третий управляющий сигнал, указывающий рабочее состояние модуля 68 управления шумоподавлением.
Модуль 63 аудиоуправления, модуль 67 управления кузова транспортного средства и модуль 68 управления шумоподавлением могут представлять собой компьютеры, включающие в себя CPU (центральный процессор) и периферийный компонент для CPU, такой как устройство хранения данных. Соответствующие функции этих компьютеров, описанных в данном документе, реализуются посредством соответствующих CPU, выполняющих компьютерные программы, сохраненные в устройстве хранения данных. Дополнительно, ссылочные обозначения 7c и 7d указывают колеса, отличные от ведущих колес.
Модуль 54 определения пороговых значений частоты вращения, проиллюстрированный на фиг. 4, принимает информацию о погоде от датчика 60 и навигационного устройства 61, первый управляющий сигнал из модуля 63 аудиоуправления, второй управляющий сигнал из модуля 67 управления кузова транспортного средства и третий управляющий сигнал из модуля 68 управления шумоподавлением. Модуль 54 определения пороговых значений частоты вращения корректирует, на основе этих сигналов, пороговое значение Tr частоты вращения, которое задано согласно скорости V транспортного средства 1.
Например, когда модуль 54 определения пороговых значений частоты вращения обнаруживает дождь на основе информации о погоде от датчика 60 или из навигационного устройства 61, он оценивает увеличенную абсолютную величину шума при движении в транспортном средстве вследствие дождя в качестве увеличенной абсолютной величины Iv шума в салоне транспортного средства. Например, модуль 54 определения пороговых значений частоты вращения может оценивать увеличенную абсолютную величину Iv на основе соответствующих увеличенных абсолютных величин шума при движении, ранее измеренных для соответствующих количеств осадков. Модуль 54 определения пороговых значений частоты вращения корректирует пороговое значение Tr частоты вращения на основе скорости V и оцененной увеличенной абсолютной величины Iv.
Фиг. 12A иллюстрирует разность (I0-I1) между абсолютной величиной шума в салоне транспортного средства перед его колебанием вследствие дождя и абсолютной величиной шума стартера. Штрихпунктирная линия 71 указывает разность (I0-I1) для частоты Re вращения двигателя, равной "R3". Сплошная линия 72 указывает разность (I0-I1) для частоты Re вращения двигателя, равной "R4" выше "R3".
Помимо этого, когда скорость V транспортного средства 1 составляет "V4", разность (I0-I1) составляет допустимое значение Ti на частоте Re вращения двигателя, равной "R3". Разность (I0-I1) для частоты Re вращения двигателя, равной "R4", превышает разность (I0-I1) для частоты Re вращения двигателя, равной "R3", и разность между ними равна увеличенной абсолютной величине Iv.
Соответственно, модуль 54 определения пороговых значений частоты вращения задает "R3" равным пороговому значению Tr частоты вращения до того, как шум при движении в салоне увеличивается вследствие дождя. После того, как шум при движении в салоне увеличивается на увеличенную абсолютную величину Iv вследствие дождя, разность (I0-I1) составляет допустимое значение Ti на частоте Re вращения двигателя, равной "R4". Следовательно, после того, как шум при движении в салоне увеличивается вследствие дождя, модуль 54 определения пороговых значений частоты вращения корректирует пороговое значение Tr частоты вращения на "R4".
Модуль 54 определения пороговых значений частоты вращения оценивает соответствующие разности (I0-I1) для различных комбинаций частоты Re вращения двигателя и скорости V, и на основе которых оцененных значений, модуль определения пороговых значений частоты вращения дополнительно оценивает пороговое значение Tr частоты вращения, при котором разность (I0-I1-Iv), полученная посредством вычитания увеличенной абсолютной величины Iv из оцененных значений, составляет допустимое значение Ti.
Дополнительно, модуль 54 определения пороговых значений частоты вращения оценивает, на основе первого управляющего сигнала из модуля 63 аудиоуправления, увеличенную абсолютную величину Iv шума в салоне транспортного средства, которая увеличивается вследствие работы аудиофункции.
Еще дополнительно, например, модуль 54 определения пороговых значений частоты вращения оценивает, на основе второго управляющего сигнала из модуля 67 управления кузова транспортного средства, увеличенную абсолютную величину Iv шума в салоне транспортного средства, которая увеличивается вследствие использования стеклоочистителя 64. Модуль 54 определения пороговых значений частоты вращения оценивает пороговое значение Tr частоты вращения на основе оцененной увеличенной абсолютной величины Iv. Когда возникает фактор колебания, который формирует шум, отличный от шума стартера, в силу этого приводя к колебанию абсолютной величины шума стартера, воспринимаемого для водителя, модуль 54 определения пороговых значений частоты вращения может корректировать пороговое значение Tr частоты вращения на максимальное значение, допустимое для кривошипно-шатунного механизма двигателя 2, независимо от скорости V.
Дополнительно, например, модуль 54 определения пороговых значений частоты вращения может оценивать, на основе третьего управляющего сигнала из модуля 68 управления шумоподавлением, абсолютную величину фонового шума, уменьшенную посредством модуля 68 управления шумоподавлением. Например, модуль 54 определения пороговых значений частоты вращения может оценивать уменьшенную абсолютную величину Iv фонового шума на основе функциональных технических требований модуля 68 управления шумоподавлением. Модуль 54 определения пороговых значений частоты вращения корректирует, на основе оцененной уменьшенной абсолютной величины Iv, пороговое значение Tr частоты вращения, которое задано согласно скорости V.
Фиг. 12B иллюстрирует разность (I0-I1) между абсолютной величиной фонового шума перед его уменьшением посредством модуля 68 управления шумоподавлением и абсолютной величиной шума стартера. Штрихпунктирная линия 73 указывает разность (I0-I1) для частоты Re вращения двигателя, равной "R3". Сплошная линия 74 указывает разность (I0-I1) для частоты Re вращения двигателя, равной "R4" ниже "R3".
Дополнительно, когда скорость V транспортного средства 1 составляет "V4", разность (I0-I1) составляет допустимое значение Ti на частоте Re вращения двигателя, равной "R3". Еще дополнительно, разность (I0-I1) для частоты Re вращения двигателя, равной "R4", меньше разности (I0-I1) для частоты Re вращения двигателя, равной "R3", и разность между ними равна уменьшенной абсолютной величине Iv.
Соответственно, когда модуль 68 управления шумоподавлением не работает, модулем 54 определения пороговых значений частоты вращения задает "R3" равным пороговому значению Tr частоты вращения. Когда модуль 68 управления шумоподавлением работает, разность (I0-I1) составляет допустимое значение Ti на частоте Re вращения двигателя, равной "R4". Соответственно, когда модуль 68 управления шумоподавлением работает, модуль 54 определения пороговых значений частоты вращения корректирует пороговое значение Tr частоты вращения на "R4".
Модуль 54 определения пороговых значений частоты вращения оценивает соответствующие разности (I0-I1) для различных комбинаций частоты Re вращения двигателя и скорости V, и на основе которых оцененных значений, модуль определения пороговых значений частоты вращения дополнительно оценивает пороговое значение Tr частоты вращения, при котором сумма (I0-I1+Iv) оцененных значений и уменьшенной абсолютной величины Iv составляет допустимое значение Ti.
Преимущество четвертого варианта осуществления
(1) Модуль 54 определения пороговых значений частоты вращения в четвертом варианте осуществления определяет фактор колебания, который формирует шум, отличный от шума стартера, возникающего при зацеплении ведущей шестерни 31 в двигателе 2 в ходе инерционного вращения с коронной шестерней 32 в электромоторе 8, в силу этого приводя к колебанию абсолютной величины шума стартера, воспринимаемого для водителя транспортного средства 1. Модуль 54 определения пороговых значений частоты вращения корректирует пороговое значение Tr частоты вращения согласно фактору колебания. Соответственно, соответствующее пороговое значение Tr частоты вращения может использоваться согласно возникновению фактора колебания. Например, когда шум стартера трудно слышать вследствие фактора колебания, пороговое значение Tr частоты вращения может задаваться большим. Это позволяет в большей степени расширять диапазон скорости V, обеспечивающей первое инерционное движение. Как результат, может повышаться эффективность использования топлива транспортного средства 1.
(2) Модуль 54 определения пороговых значений частоты вращения корректирует пороговое значение Tr частоты вращения согласно рабочему состоянию устройства уменьшения уровня шума для уменьшения фонового шума в салоне транспортного средства 1. Следовательно, соответствующее пороговое значение Tr частоты вращения может использоваться согласно возникновению фактора колебания.
Перечень ссылочных позиций
1 - транспортное средство, 2 - двигатель, 2a - датчик частоты вращения, 3 - ведущий диск, 4 - преобразователь крутящего момента, 5 - бесступенчатая трансмиссия, 6 - дифференциальная шестерня, 7a и 7b - ведущее колесо, 7c и 7d - колесо, 8 - электромотор, 9 - генератор переменного тока, 10 - аккумулятор, 11 - блокировочная муфта, 12 - механизм переключения переднего/заднего хода, 13 - первичный шкив, 14 - вторичный шкив, 15 - ремень, 16 - масляный насос, 17 - муфта переднего хода, 18 - тормоз заднего хода, 19 - электрический масляный насос, 20 - модуль управления двигателем, 21 - педаль тормоза, 22 - тормозной переключатель, 23 - педаль акселератора, 24 - датчик степени открытия педали акселератора, 25 - главный цилиндр, 26 - датчик давления в главном цилиндре, 27 - главный вакуумный усилитель, 28 - датчик отрицательного давления, 29a и 29b - датчик скорости вращения колес, 31 - ведущая шестерня, 32 - коронная шестерня, 33 - актуатор, 40 - модуль управления трансмиссией, 41 - устройство управления движением транспортного средства, 50 - модуль управления глушением двигателя на холостом ходу, 51 - модуль управления инерционным движением, 52 - модуль управления двигателем, 53 - модуль управления проворачиванием, 54 - модуль определения пороговых значений частоты вращения, 55 - датчик шума, 56 - модуль определения направления вращения, 60 - датчик, 61 - навигационное устройство, 62 - устройство связи, 63 - модуль аудиоуправления, 64 - стеклоочиститель, 65 - руль, 66 - переключатель стеклоочистителя, 67 - модуль управления кузова транспортного средства, 68 - модуль управления шумоподавлением, 69 - динамик










Изобретение относится к способу управления двигателем и к устройству управления движением транспортного средства. Способ управления двигателем включает в себя: определение намерения водителя для ускорения в ходе движения транспортного средства (1); прекращение подачи топлива в двигатель (2), когда определяется то, что водитель не имеет намерения для ускорения; разрешение повторного запуска двигателя (2), когда определяется то, что водитель имеет намерение для ускорения после прекращения подачи топлива в двигатель (2); запрет повторного запуска двигателя (2) до тех пор, пока частота (Re) вращения двигателя не упадет до или ниже заданного порогового значения (Tr) частоты вращения, даже когда разрешается повторный запуск двигателя (2); и повторный запуск двигателя (2) после того, как частота (Re) вращения двигателя падает до или ниже заданного порогового значения (Tr) частоты вращения. Техническим результатом является повышение эффективности использования топлива. 2 н. и 4 з.п. ф-лы, 20 ил.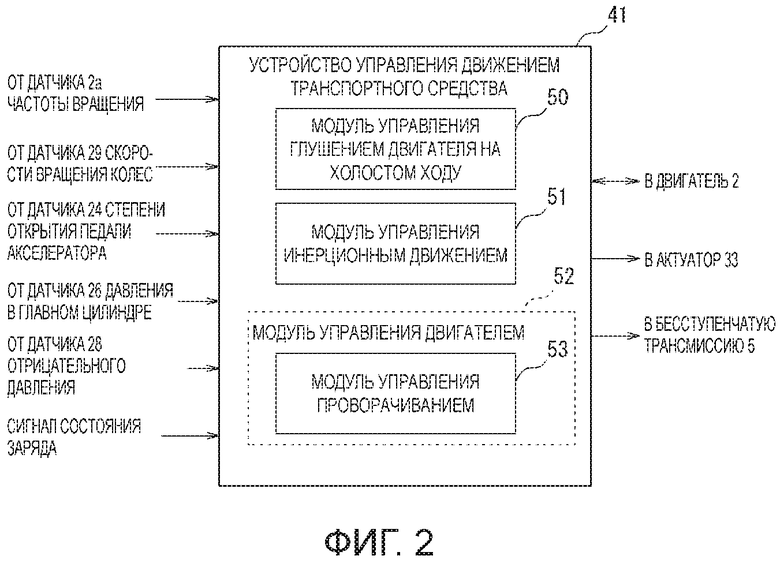
1. Способ управления двигателем, при котором:
определяют намерение водителя для ускорения в ходе движения транспортного средства;
прекращают подачу топлива в двигатель, когда определяется то, что водитель не имеет намерения для ускорения;
определяют скорость транспортного средства в ходе инерционного движения, притом что подача топлива в двигатель по-прежнему прекращена;
разрешают повторный запуск двигателя, когда определяется то, что водитель имеет намерение для ускорения после прекращения подачи топлива в двигатель;
запрещают повторный запуск двигателя до тех пор, пока частота вращения двигателя не упадет до заданного порогового значения частоты вращения или ниже него, даже когда разрешается повторный запуск двигателя;
повторно запускают двигатель после того, как частота вращения двигателя падает до заданного порогового значения частоты вращения или ниже него; и
изменяют пороговое значение частоты вращения в зависимости от определяемой скорости,
при этом пороговое значение частоты вращения увеличивается с увеличением определяемой скорости.
2. Способ управления двигателем по п. 1, при котором, когда определяемая скорость равна или выше заданного порогового значения скорости, заданное пороговое значение частоты вращения задают равным максимальному значению, допустимому для кривошипно-шатунного механизма двигателя, и, когда определяемая скорость ниже заданного порогового значения скорости, заданное пороговое значение частоты вращения ограничивают значением, меньшим максимального значения.
3. Способ управления двигателем по п. 1 или 2, при котором:
определяют то, находится ли двигатель в режиме прямого вращения или в режиме обратного вращения;
разрешают повторный запуск двигателя, когда частота вращения двигателя для двигателя в ходе прямого вращения равна или меньше первого порогового значения частоты вращения, отличающегося в зависимости от определяемой скорости; и
разрешают повторный запуск двигателя, когда частота вращения двигателя для двигателя в ходе обратного вращения равна или меньше второго порогового значения частоты вращения, которое определяется отдельно от первого порогового значения частоты вращения и отличается в зависимости от определяемой скорости.
4. Способ управления двигателем по п. 3, при котором первое пороговое значение частоты вращения превышает второе пороговое значение частоты вращения, когда скорость, определенная в ходе прямого вращения двигателя, является идентичной скорости, определенной в ходе обратного вращения двигателя.
5. Способ управления двигателем по п. 1 или 2, при котором:
определяют фактор колебания, формирующего шум, отличный от шума, возникающего при зацеплении первой шестерни в двигателе в ходе инерционного вращения со второй шестерней в электромоторе для запуска двигателя, что приводит к колебанию абсолютной величины шума, воспринимаемого для водителя транспортного средства; и
корректируют пороговое значение частоты вращения согласно определенному фактору колебания.
6. Устройство управления движением транспортного средства, выполненное с возможностью обеспечения движения транспортного средства посредством инерции, притом что подача топлива в двигатель по-прежнему прекращена в ходе движения транспортного средства, причем устройство управления движением транспортного средства содержит:
устройство определения частоты вращения двигателя, выполненное с возможностью определения частоты вращения двигателя;
устройство определения степени нажатия педали акселератора, выполненное с возможностью определения степени акселератора, нажимаемого водителем;
электромотор, выполненный с возможностью запуска двигателя из остановленного состояния;
устройство впрыска топлива, выполненное с возможностью регулирования топлива, подаваемого в двигатель; и
устройство управления, выполненное с возможностью управления электромотором и устройством впрыска топлива; и
датчик, выполненный с возможностью определения скорости транспортного средства, движущегося по инерции,
при этом, когда степень нажатия педали акселератора не определяется, устройство управления прекращает подачу топлива в двигатель, и когда акселератор нажимается после прекращения подачи топлива в двигатель, устройство управления запрещает повторный запуск двигателя до тех пор, пока частота вращения двигателя не упадет до заданного порогового значения частоты вращения или ниже него, и затем повторно запускает двигатель с помощью электромотора после того, как частота вращения двигателя падает до заданного порогового значения частоты вращения или ниже него,
причем устройство управления изменяет пороговое значение частоты вращения в зависимости от определяемой скорости,
при этом пороговое значение частоты вращения увеличивается с увеличением определяемой скорости.
| УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ВНУТРЕННЕГО СГОРАНИЯ, УСТАНОВЛЕННЫМ НА ТРАНСПОРТНОМ СРЕДСТВЕ | 2008 |
|
RU2442004C2 |
| JP 2013122168 A, 20.06.2013 | |||
| JP 2004011569 A, 15.01.2004 | |||
| DE 112012003475 T5, 30.04.2014 | |||
| Чувствительный элемент люминесцентного сенсора и способ его получения | 2019 |
|
RU2757012C2 |

