Устройство относится к области робототехники и может быть использовано для автоматизации производственных процессов.
Техническим результатом является повышение быстродействия, снижение ошибки позиционирования, упрощение устройства и расширение функциональных возможностей.
Известен «Имитатор автоматической системы робастного управления периодическими режимами двухзвенного робота-манипулятора» (Патент на ПМ № 125360, МПК G05B 13/02, опубл. 27.02.2013 г.), содержащий нелинейно-нестационарный объект управления, блоки задающих воздействий, локальные комбинированные робастные регуляторы (ЛР_1 и ЛР_2), локальные наблюдатели состояния (НС_1 и НС_2), первый, второй, третий, четвертый, пятый, шестой осциллографы, графопостроитель, первый и второй блоки задания коэффициентов, первый, второй, третий и четвертый блоки суммирования, при этом первый выход объекта управления одновременно подключен к первому входу графопостроителя и второму входу первого наблюдателя состояния (НС_1), выходы которого подключены к соответствующим входам первого блока задания коэффициентов, а также к первому, второму и третьему входам первого локального регулятора (ЛР_1); выходы первого блока задания коэффициентов идут на соответствующие входы первого блока суммирования, выход которого подключен ко второму входу второго блока суммирования; к первому входу второго блока суммирования подключен выход первого блока задающего воздействия, сигнал, с выхода которого также поступает на вход первого осциллографа; выход второго блока суммирования одновременно подключен к четвертому входу первого локального регулятора (ЛР_1) и к входу второго осциллографа; выход первого локального регулятора (ЛР_1) подключен к входу третьего осциллографа, к первому входу объекта управления, а также к первому входу первого наблюдателя состояния(НС_1); второй выход объекта управления одновременно подключен ко второму входу графопостроителя и первому входу второго наблюдателя состояния (НС_2), выходы которого подключены к соответствующим входам второго блока задания коэффициентов, а также к первому, второму и третьему входам второго локального регулятора (ЛР_2); выходы второго блока задания коэффициентов соединены с соответствующими входами третьего блока суммирования, выход которого подключен ко второму входу четвертого блока суммирования; к первому входу четвертого блока суммирования подключен выход второго блока задающего воздействия, который также соединен с входом четвертого осциллографа; выход четвертого блока суммирования подключен к входу пятого осциллографа и к четвертому входу второго локального регулятора (ЛР_2);выход которого соединен с входом шестого осциллографа, со вторым входом объекта управления, а также со вторым входом второго наблюдателя (НС_2).
Недостатком данного технического решения является сложность устройства и недостаточное быстродействие из-за формирования управляющего воздействия по разновременным функциям: время задания параметров регулирования звеньев манипулятора и их отработка двигателем, что на порядки больше времени коррекции сигналов ошибки регулирования. Кроме того, данное устройство является имитатором, а не реальным устройством, подверженного влиянию реальным возмущающим моментам, в результате которых появляются неконтролируемые приращения углового позиционирования. В этом известном устройстве, парируется ошибка между заданным положением звена и его оценкой, что не дает снижение ошибки позиционирования реального объекта.
Известна система планирования перемещения робота-манипулятора в неизвестной динамической среде (Патент на ПМ № 83729, МПК G05J 13/00, опубл. 20.06.2008 г.), содержащая инфракрасные датчики, блок вычисления расстояния между каждым звеном робота-манипулятора и ближайшим препятствием, применение нечеткой структуры принятия решения для определения изменения угла перемещения каждого звена робота-манипулятора в ходе каждой программной итерации, использование в качестве входных параметров значений минимального расстояния между каждым звеном и ближайшим препятствием, а также значений разницы между текущей и целевой конфигурациями звеньев робота-манипулятора, отличающаяся тем, что она дополнительно содержит подсистему классификации местоположений препятствий в рабочей зоне робота-манипулятора и связанных с местоположениями препятствий направлений в виде движения каждого звена робота-манипулятора, состоящую для двухзвенного робота-манипулятора из двухсот пятидесяти шести позиций, на основе полной классификационной таблицы обучена по методу обратного распространения ошибки трехслойная нейронная сеть, состоящая из шести входов, сорока нейронов первого скрытого слоя, двадцати пяти нейронов второго скрытого слоя, двух нейронов выходного слоя, входами трехслойной нейронной сети являются выходы блока кодирования, тогда как выходы этой сети используются в качестве входов в блок декодирования, два выхода блока декодирования - это окончательные модифицированные значения расстояния между каждым звеном робота и ближайшим препятствием, которые являются входами в блок вычисления изменения расстояния, имеющим два выхода, в качестве которых используются изменения окончательных модифицированных значений расстояния между каждым звеном робота и препятствием, окончательные модифицированные значения расстояний между каждым звеном робота и препятствием и их изменения являются входами в нечеткую структуру принятия решения, состоящую из двух стадий, первая стадия включает первую пару нечетких блоков: один для первого звена, второй для второго звена двухзвенного робота-манипулятора, входы для каждого нечеткого блока первой пары представлены двумя параметрами: значением разницы между целевой и текущей конфигурациями, а также предыдущим изменением угла перемещения каждого звена робота-манипулятора, которое обеспечивает реализацию внутренней обратной связи в системе планирования перемещения робота-манипулятора в неизвестной динамической среде, выход каждого нечеткого блока первой пары - это предварительное значение шага перемещения соответствующего звена робота- манипулятора, которое вместе с окончательным модифицированным значением расстояния между каждым звеном робота-манипулятора и ближайшим препятствием, а также изменением окончательного модифицированного значения расстояния между каждым звеном робота- манипулятора и препятствием используются в качестве входов на вторую стадию нечеткой подсистемы, представленную двумя нечеткими блоками, выходы второй пары нечетких блоков - это значение изменения угла перемещения каждого из звеньев робота-манипулятора, коэффициенты усиления, на которые умножаются на значения изменения угла перемещения каждого звена робота – манипулятора, полученные значения этого произведения поступают на исполнительное устройство, значения произведения коэффициентов усиления и изменений угла перемещения звеньев робота – манипулятора, полученные в ходе предыдущей компьютерной итерации, обеспечивая внешнюю обратную связь, используются вместе со значениями целевой конфигурации в качестве входов в систему планирования перемещения
Недостатками данного технического решения является его сложность. Даже рассматривая не всего робота-манипулятора в неизвестной динамической среде с препятствиями не только ограничивающими применение данной полезной модели, но прекращение функционирования полезной модели в одном запуске движения, а рассматривая заданный угол поворота с фактическим. Угловая ошибка быстро не компенсируется, а постепенно снижается на каждом шаге итерации, сравниваясь дополнительно еще и в нечеткой подсистеме принятия решения с измеренными расстояниями между звеньями и препятствием.
Наиболее близким техническим решением, является «Устройство управления манипулятором робота (Патент на ИЗ № 2230349, МПК G05B 11/00, G05J 13/00, опубл. 27.10.2003 г.), содержащее последовательно соединенные первый блок сравнения, первый усилитель, сумматор, сервопривод, исполнительный орган, датчик угла поворота и содержащее также блок дифференцирования, подключенный через второй усилитель ко второму входу сумматора, два нелинейных элемента, второй блок сравнения, два блока выделения модуля, схема «И», схема «НЕ», шесть ключей, задатчик скорости, задатчик положения, инвертор, второй сумматор и третий усилитель, причем
Выход второго блока сравнения через последовательно соединенные первый нелинейный элемент с зоной нечувствительности, первый блок выделения модуля, схему «И», схему «НЕ» соединен с первым входом первого ключа, второй вход которого соединен параллельно с первым входом второго блока сравнения, выход датчика угла поворота подключен ко второму входу второго блока сравнения, к первому входу второго ключа, выход которого параллельно с выходом третьего ключа соединен со входом блока дифференцирования и выход датчика угла поворота подключен также через четвертый ключ к первому входу первого блока сравнения, выход которого соединен также с первым входом третьего ключа, выход второго нелинейного элемента через второй блок выделения модуля подключен ко второму входу схемы «И», с первым входом пятого ключа соединен выход третьего усилителя, выход пятого ключа параллельно с выходом первого ключа соединен со вторым входом первого блока сравнения, выход схемы «НЕ соединен также со вторыми входами третьего и четвертого ключей, выход схемы «И» соединен также со вторыми входами второго и пятого ключей, выход задатчика положения соединен с первым входом второго блока сравнения, а выход задатчика скорости соединен со входом второго нелинейного элемента и первым входом шестого ключа, первый выход которого соединен через инвертор с первым входом второго сумматора, выход которого соединен со входом третьего усилителя, а второй выход шестого ключа соединен со вторым входом второго сумматора, управляющий вход шестого ключа предназначен для подачи на него сигнала с первого нелинейного элемента, а второй нелинейный элемент выполнен в виде усилителя ограничителя.
Здесь «сигнал ошибки по скорости находится в результате дифференцирования сигнала ошибки положения, поступающий через открытый ключ 18 на входе блока дифференцирования 9». Однако дифференцирование сигнала в схеме приводит к усилению высокочастотных шумов (помех).
Недостатками устройства также является не плавное регулирование, а по «логической единице», по нелинейным законам, что не снижает ошибки позиционирования малых углов и вызывает большое перерегулирование аналогового сигнала по амплитуде и увеличении времени установления процесса.
Большое число элементов, таких как два нелинейных элемента, выделение модуля, два полупериодных выпрямителя; усложняют заявленное устройство и снижают его быстродействие.
Задачей заявляемого устройства управления манипулятором робота является повышение быстродействия, снижение ошибки позиционирования, упрощение устройства и расширение функциональных возможностей.
Поставленная задача достигается тем, что устройство управления манипулятором робота, содержащее блок сравнения (сумматор), первый, второй и третий усилители, датчик угла поворота, подключенный к первому входу блока сравнения (сумматору) и исполнительное устройство, содержит четвертый, пятый и шестой усилители, первый и второй интеграторы; входы первого, второго, и третьего усилителей соединены с выходом сумматора, вторые входы которого связаны с датчиком угла, а первые входы соединены с выходом первого интегратора, который через посредство пятого усилителя соединен со первым входом второго интегратора, вторые, третьи, четвертые и пятые входы которого связаны с выходами второго, третьего, четвертого и шестого усилителей, соответственно; при этом выход второго интегратора подключен к первому входу первого интегратора, а также ко входам четвертого и шестого усилителей, а выход первого усилителя соединен со вторым входом первого интегратора , первый вход которого связан с выходом первого усилителя. Выходы четвертого и пятого усилителей подключены к исполнительному органу.
Сущность предлагаемого изобретения представлена следующими графическими материалами:
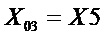
Фиг.1. Функциональная схема предлагаемого устройства
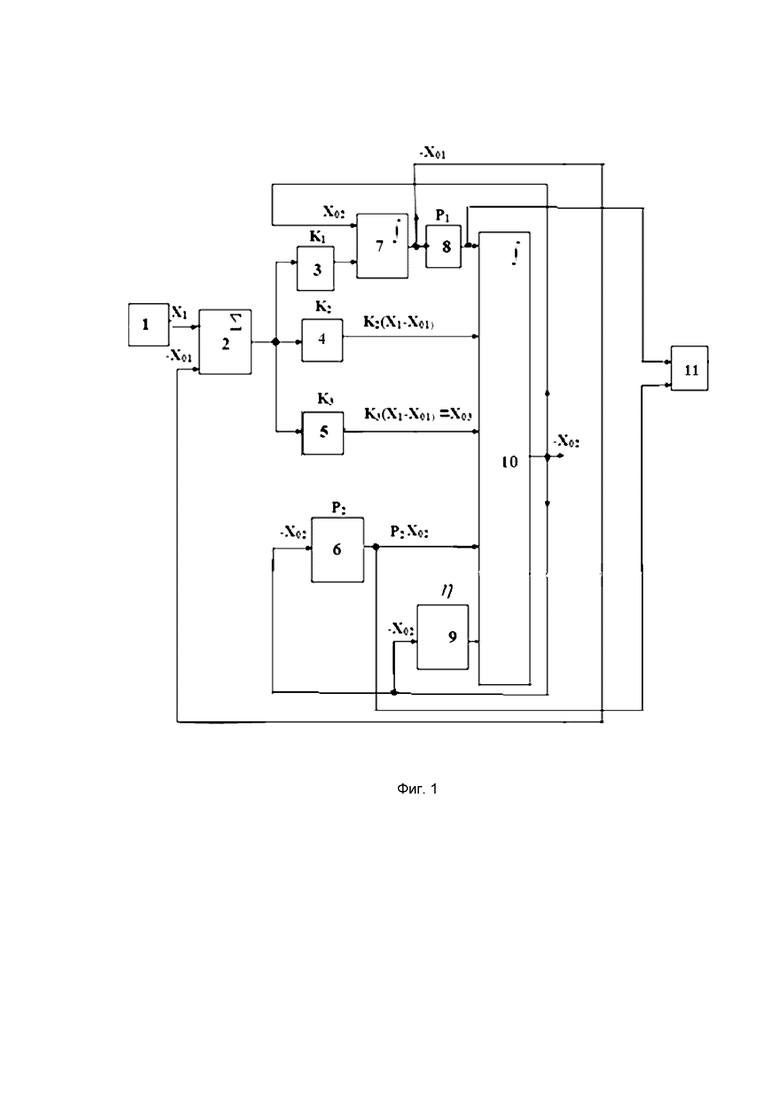
Фиг.2. Переходной процесс без наблюдающего устройства и управления по угловому отклонению (слева) и угловой скорости (справа)
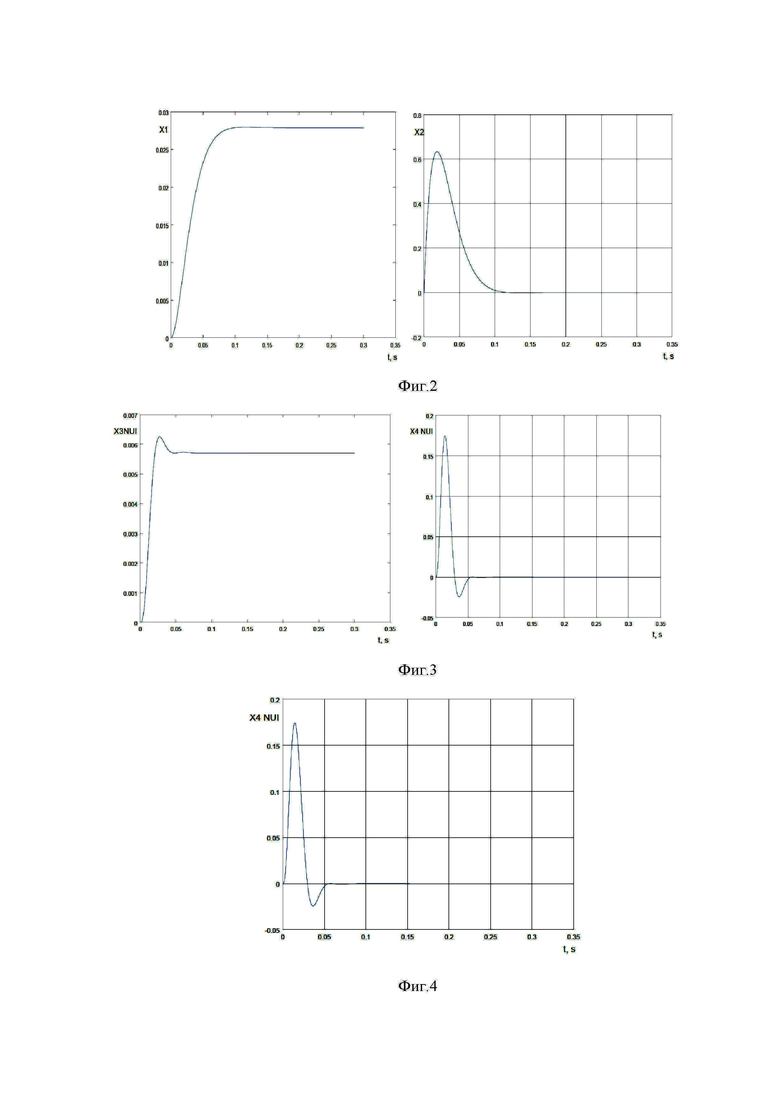
Фиг.3. Переходной процесс с наблюдающим устройством и управлением по угловому отклонению (слева) и угловой скорости (справа)
Фиг.4. Переходной процесс оценки возмущающего момента с наблюдающим устройством и управлением
На схеме устройства управления манипулятором робота: 1 - датчик угла поворота, 2 - блок сравнения (сумматор), 3, 4, 5, 6, 8, 9 – первый, второй, третий, четвертый, пятый и шестой усилители, 7, 10 - первый и второй интеграторы, 11 - исполнительный орган.
Входы первого 3, второго 4, и третьего 5 усилителей соединены с выходом сумматора 1, вторые входы которого связаны с датчиком угла 1, а первые входы соединены с выходом первого интегратора 7, который через посредство усилителя 8 соединен с первым входом второго интегратора 10, вторые, третьи, четвертые и пятые входы которого связаны с выходами второго 4, третьего 5, четвертого 6 и шестого 9 усилителей, соответственно; при этом выход второго интегратора 9 подключен к первому входу первого интегратора 7, а также ко входам четвертого 6 и шестого 9 усилителей, а выход первого усилителя 3 соединен со вторым входом первого интегратора 7, первый вход которого связан с выходом первого усилителя 3. Выходы четвертого 6 и пятого 8 усилителей подключены к исполнительному органу 11.
Работает устройство следующим образом. Сигнал датчика угла порота 1 Х1 сравнивается (вычитается) с его оценкой Х01 на сумматоре 2 и разностный сигнал поступает на первый, второй и третий усилители: 3, 4, 5, с коэффициентами усиления К1, К2, К3, соответственно. Усиленные разностные сигналы со второго 4 и третьего 5 усилителей поступают на суммирующие вторые и третьи входы интегратора 10. Выходной сигнал интегратора 10 Х02 является оценкой угловой скорости звена манипулятора, и этот сигнал поступает на входы четвертого 6 и шестого 9 усилителей, а также на первый вход первого интегратора 7, где интегрируется совместно с сигналом от первого усилителя 3. С выхода первого интегратора получают оценку углового положения Х01, который поступает как на вход сумматора (сравнивающего устройства), так и на пятый усилитель 8 сигнал с которого на первый вход второго интегратора 10, при этом сигналы сформированные четвертым 6 и пятым 8 усилителями по регулировке углового положения и угловой скорости звена манипулятора, поступают на исполнительное устройство 11. Сигнал Х03 на выходе третьего 5 усилителя, является интегральной оценкой возмущающего момента.
Преимущество заявленного устройства в простоте его функциональной схемы и базирующиеся на ней электрических компонентов. В автоматическом режиме снижается угловое отклонение, обусловленное возмущающим моментом и не позволяющем точно исполнить заданные движения звена манипулятора. В устройстве есть возможность в текущем режиме регистрировать оценку углового положения на выходе интегратора 7, угловой скорости на выходе второго интегратора 10, а с выхода третьего усилителя 5 – интегральную оценку возмущающего момента.
Дадим теоретическое обоснование преобразованиям сигналов в заявленной схеме.
Уравнение движения звена манипулятора (Черноусько Ф.Л., Болотник Н.Н., Градецкий В.Г. Манипуляционные роботы: динамика, управление, оптимизация.- М.:Наука.1989. С.92 и с.286) имеет вид:
 ,(1)
,(1)
где
 - угол поворота звена манипулятора;
- угол поворота звена манипулятора;
 - суммарный момент инерции звена манипулятора;
- суммарный момент инерции звена манипулятора;
 - коэффициенты индуктивности и сопротивления электродвигателя;
- коэффициенты индуктивности и сопротивления электродвигателя;
 - коэффициент пропорциональности между током и электромагнитным моментом;
- коэффициент пропорциональности между током и электромагнитным моментом;
 - управляющее напряжение.
- управляющее напряжение.
Манипулятор управляется в заданном режиме, что касается поворотов звена на большие углы. При возмущающих моментах остаются некомпенсированными малые угловые отклонения. Уравнение движение звена манипулятора по отклонению параметров при некомпенсированном возмущающем моменте MB запишем в следующем виде:
 ,(2)
,(2)
Применяя метод наблюдающих устройств (Кузовков Н.Т Модальное управление и наблюдающие устройства. М.: Машиностроение. 1976. 184 с.), и обозначая:
 ,
,  ,
,  ,
,  ,
, 
Здесь индексом о- обозначена оценка параметра.
Получим две системы уравнений. Приведем их в форме Коши. Одна из них описывает собственное движение без управления под действием возмущающего момента:
 ,(3)
,(3)
Другая система уравнений движения звена манипулятора с наблюдающим устройством и управлением:
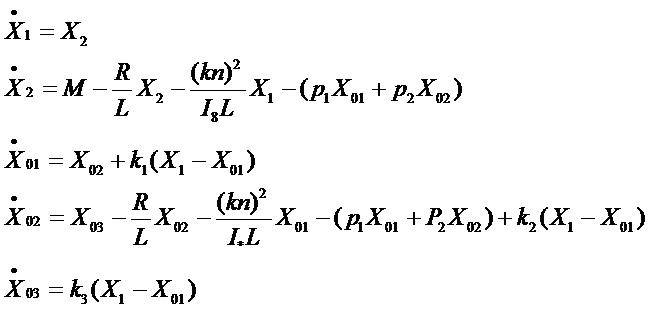 ,(4)
,(4)
где  ,
,  - коэффициенты исполнительного механизма управления по углу и угловой скорости, соответственно;
- коэффициенты исполнительного механизма управления по углу и угловой скорости, соответственно;
 ,
,  ,
, -коэффициенты наблюдающего устройства.
-коэффициенты наблюдающего устройства.
Эти постоянные коэффициенты рассчитываются путем приравнивая коэффициентов полинома наблюдающего устройства коэффициентам стандартных форм (например, биномиальной), имеющих хорошую динамическую характеристику.
Первые два уравнения описывают динамику реального звена манипулятора под действием возмущающего момента и парирующей добавки по оценке угла и угловой скорости.
Третье, четвертое и пятое уравнение – это наблюдающее устройство с регулятором.
Приведем результаты моделирования уравнения при следующих переобозначениях:
 ,
,  ,
,  ,
,  ,
, 
Результаты моделирования уравнений (3) - без наблюдающего устройства и без управления и уравнений (4) с наблюдающим устройством и управлением, и по углу и угловой скорости приведено на рис.2 и рис.3, соответственно.
Оценка возмущающего момента, заданного во втором уравнении (4) М=90 отн. ед., наблюдающим устройством и управлением, приведена на рис.4.
Сравнение показало снижение ошибки позиционирования, т.е. амплитуды переходного процесса по углу поворота звена манипулятора в 4,5 раза, по угловой скорости в 3 раза, а время установившегося процесса в 2 раза при снабжении дополнительным управлением и наблюдающим устройством.
Схемное решение уравнения алгоритма (4) в виде функциональной схемы рис.1., выполненной, например, на операционных усилителях, позволяет организовать интеграторы (с конденсатором в обратной связи), усилители, с коэффициентами усиления, равными отношению сопротивлений в обратной и прямой связи, а также сумматоров и элементов сравнения при подключении сигнала по прямому или дифференциальному входам, соответственно.
Технический результат заявленного устройства состоит в снижении погрешности позиционирования по углу, обусловленной формированием оценки углового положения и принуждением к ее уменьшению за счет соответствующего регулирования по углу и угловой скорости;в упрощении функциональной схемы за счет отсутствия нелинейных элементов и ключей, при этом схема устройства выполнена на двух интеграторах, одном сумматоре и шести усилителях; в расширении функциональных возможностей за счет извлечения из узлов схемы в текущем режиме оценок угла, угловой скорости и возмущающего момента звена для проверки, настройки или калибровки.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2396586C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ РОБОТА | 2002 |
|
RU2230349C2 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2385480C1 |
| Самонастраивающийся электропривод манипулятора | 2016 |
|
RU2631784C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖИТЕЛЕМ ПОДВОДНОГО РОБОТА | 2000 |
|
RU2191106C2 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 1990 |
|
RU2037173C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 2002 |
|
RU2208241C1 |
| ЭЛЕКТРОПРИВОД МАНИПУЛЯТОРА | 2010 |
|
RU2443543C1 |
| Устройство для управления приводом робота | 1990 |
|
SU1782721A1 |
| Самонастраивающийся электропривод робота | 1990 |
|
SU1773714A1 |
Устройство управления манипулятором робота содержит датчик угла поворота, блок сравнения (сумматор), шесть усилителей, два интегратора, исполнительное устройство, соединенные определенным образом. Обеспечивается повышение быстродействия, снижение ошибки позиционирования, упрощение устройства и расширение функциональных возможностей. 4 ил.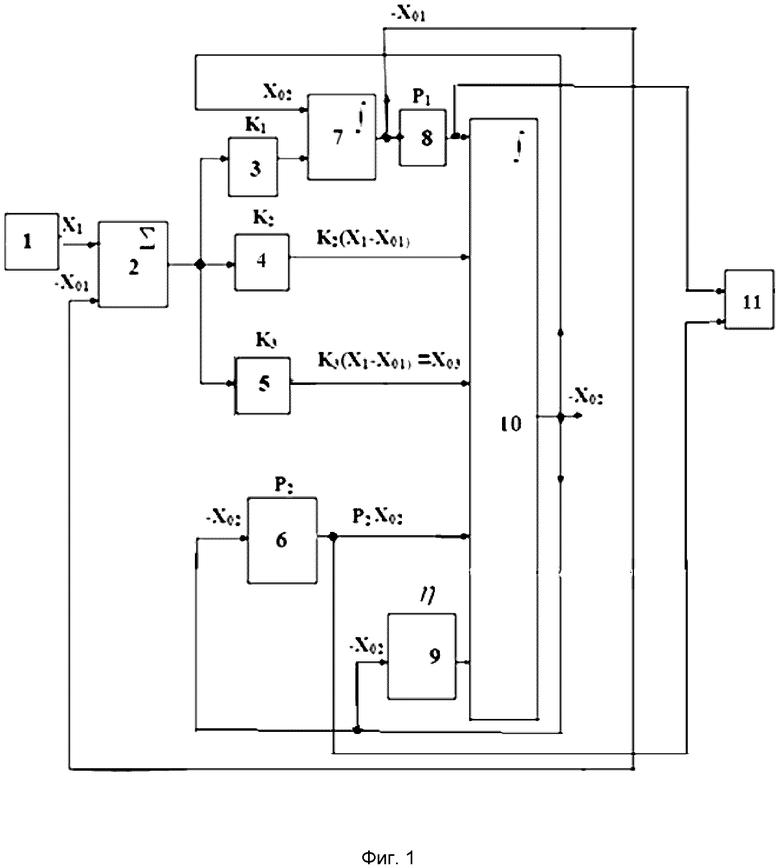
Устройство управления манипулятором робота, содержащее блок сравнения (сумматор), первый, второй и третий усилители, датчик угла поворота, подключенный к первому входу блока сравнения (сумматору), и исполнительное устройство, отличающееся тем, что в него введены четвертый, пятый и шестой усилители, первый и второй интеграторы, при этом входы первого, второго и третьего усилителей соединены с выходом сумматора, второй вход которого связан с выходом первого интегратора, который через посредство пятого усилителя соединен с первым входом второго интегратора, вторые, третьи, четвертые и пятые входы которого связаны с выходами второго, третьего, четвертого и шестого усилителей соответственно, а выход второго интегратора подключен к первому входу первого интегратора и к входам четвертого и шестого усилителей, при этом выход первого усилителя соединен со вторым входом первого интегратора, а выходы четвертого и пятого усилителей подключены к исполнительному органу.
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1994 |
|
RU2079867C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РОБОТОМ-МАНИПУЛЯТОРОМ | 2004 |
|
RU2277042C1 |
| Устройство для управления приводом манипулятора | 1989 |
|
SU1673433A1 |
| US 4925312 A1, 15.05.1990 | |||
| US 5103404 A1, 07.04.1992. | |||

