Область применения
Область применения настоящего изобретения в целом относится к управлению датчиком кислорода.
Уровень техники и раскрытие изобретения
Для обеспечения индикации составляющих различных газов могут применяться датчики всасываемых и/или отработавших газов. Выходной сигнал датчика кислорода, например, может применяться для определения воздушно-топливного отношения (ВТО) в отработавших газах. Датчик кислорода может располагаться во впускном канале для определения концентрации газов при рециркуляции отработавших газов (РОГ) в заряде впускного воздуха. Индикацию ВТО можно использовать для регулирования различных рабочих параметров двигателя, таких как подача топлива и целевое ВТО, например. Конкретно, ВТО отработавших газов можно управлять для достижения целевого ВТО с целью максимального увеличения эффективности эксплуатации устройства снижения токсичности отработавших газов. У некоторых датчиков кислорода выходной сигнал может существенно изменяться в зависимости от их рабочей температуры. В связи с этим такие датчики кислорода могут нагреваться нагревательным элементом для достижения требуемого диапазона рабочих температур, чтобы обеспечить требуемое измерение кислорода.
При некоторых подходах импеданс датчика кислорода используется для управления температурой датчика кислорода. Например, для управления температурой датчика кислорода может применяться управление с замкнутым контуром, где температура датчика определяется на основе импеданса чувствительного к кислороду элемента (например, концентрационной ячейки) в датчике кислорода.
Авторы настоящего изобретения приняли во внимание, что импеданс такого чувствительного к кислороду элемента может возрастать экспоненциально по мере уменьшения температуры чувствительного элемента. В связи с этим импеданс может быть недопустимо высоким для определения температуры датчика кислорода в некоторых температурных диапазонах.
Проблемы при управлении датчиком кислорода создаются и другими факторами. При нагревании во время контакта воды с датчиком в датчике кислорода могут происходить, например, температурный удар и растрескивание. Высокие скорости нагрева, быстрое возрастание до высоких скоростей нагрева и продолжительный нагрев в особенности увеличивают частоту возникновения таких проблем, что может ухудшить измерение кислорода и, тем самым, работу двигателя. Соответственно, при некоторых подходах к управлению датчиком кислорода ожидают нагревания датчика кислорода до тех пор, пока отработавшие газы не достигнут температуры точки росы, при которой, как предполагается, испаряется вода в системе выпуска отработавших газов. После достижения температуры точки росы управление температурой датчика кислорода может осуществляться в режиме управления с замкнутым контуром, например.
Авторы настоящего изобретения выявили несколько проблем, возникающих при таком подходе. Конкретно, неиспарившаяся вода может оставаться в контакте с датчиком кислорода после достижения или, в некоторых случаях, превышения температуры точки росы. Эта вода может представлять собой замутненную воду, скопившуюся на датчике кислорода, смешанную с отработавшими газами и (или) присутствующую в системе выпуска отработавших газов, например. Кроме того, даже если вода полностью испаряется с датчика кислорода, новая вода может в дальнейшем попасть на датчик, например, в случае водяных брызгов. Если в этот момент управление температурой датчика кислорода осуществляется в режиме управления с замкнутым контуром, брызги воды уменьшают температуру датчика, способствуя быстрому возрастанию до высоких уровней нагрева путем управления с замкнутым контуром, что может привести к температурному удару и растрескиванию в датчике.
При других подходах к управлению датчиком кислорода стремятся к активному обнаружению попадания воды на датчик кислорода на основе тока накачки. Ток накачки представляет собой электрический ток, который возникает в результате электрохимического выкачивания или закачивания вещества (например, кислорода) из/в концентрационную ячейку путем приложения напряжения накачки к концентрационной ячейке (например, к двум электродам ячейки) и может быть пропорционален концентрации вещества внутри концентрационной ячейки, обеспечивая индикацию концентрации вещества.
Авторы настоящего изобретения выявили проблему, возникающую при таком подходе. Ток накачки может быть недостаточным для обнаружения попадания воды на датчик кислорода, помещенный в системе выпуска отработавших газов. Конкретно, ток накачки такого датчика кислорода может оставаться в районе нуля, поскольку концентрация кислорода в отработавших газах при нормальных рабочих условиях остается близкой к нулю, что является недостаточным для обнаружения попадания воды. Хотя при некоторых подходах напряжение накачки изменяется, это напряжение, как правило, изменяется только в течение небольших отрезков времени в особых условиях, при этом то и другое непригодно для обнаружения попадания воды.
Один подход, который, по меньшей мере частично, устраняет вышеназванные проблемы, содержит способ эксплуатации датчика кислорода, содержащий приложение мощности к нагревателю датчика кислорода и извещение о том, контактирует ли вода с датчиком кислорода, на основе скорости изменения температуры датчика кислорода.
В более конкретном примере извещение о том, контактирует ли вода с датчиком кислорода, содержит извещение о том, что вода контактирует с датчиком кислорода, в ответ на скорость изменения температуры, меньшую, чем минимальная скорость изменения температуры датчика кислорода, ожидаемая для мощности, прикладываемой к нагревателю.
В другом примере способ дополнительно содержит, перед извещением о том, контактирует ли вода с датчиком кислорода, определение температуры датчика кислорода на основе только сопротивления нагревателя, если сопротивление указывает на температуру, более низкую или равную пороговой температуре, и на основе как сопротивления нагревателя, так и импеданса датчика кислорода, если сопротивление указывает на температуру, более высокую, чем пороговая температура.
В еще одном примере мощность соответствует первому уровню мощности, и способ дополнительно содержит, в ответ на извещение о том, что вода контактирует с датчиком кислорода, приложение второго уровня мощности, превышающего первый уровень мощности, к нагревателю, и определение того, достигнута ли одна из ожидаемой температуры или минимальной ожидаемой скорости изменения температуры датчика кислорода, причем ожидаемая температура или минимальная ожидаемая скорость изменения температуры ожидаются для второго уровня мощности.
Таким путем как температура датчика кислорода, так и попадание воды на датчик кислорода могут быть определены во всем его рабочем диапазоне, обеспечивая возможность выполнения соответствующих действий, поддерживающих требуемое функционирование датчика кислорода независимо от того, обнаружен ли контакт воды с датчиком. Таким образом, при помощи этих действий достигается технический результат.
Перечисленные выше и другие преимущества и характеристики настоящего описания становятся очевидными из последующего раздела «Осуществление изобретения», рассматриваемого отдельно или в сочетании с приложенными чертежами.
Следует понимать, что вышеприведенное краткое описание служит лишь для ознакомления в простой форме с некоторыми концепциями, которые далее будут раскрыты подробно. Это описание не предназначено для обозначения ключевых или существенных отличительных признаков заявленного предмета изобретения, объем которого уникально определен формулой изобретения, приведенной после раздела «Осуществление изобретения». Кроме того, заявленный предмет изобретения не ограничен реализациями, которые устраняют какие-либо недостатки, указанные выше или в любой другой части настоящего раскрытия.
Краткое описание чертежей
На ФИГ. 1 показана структурная схема типового двигателя.
На ФИГ. 2 показана структурная схема типового датчика кислорода.
На ФИГ. 3 показано сопротивление нагревателя и импеданс чувствительного элемента датчика в зависимости от температуры типового датчика кислорода.
На ФИГ. 4 показана блок-схема, иллюстрирующая способ управления датчиком кислорода.
На ФИГ. 5 показана блок-схема, иллюстрирующая способ управления датчиком кислорода на основе контакта воды с датчиком.
На ФИГ. 6 показана блок-схема, иллюстрирующая способ штатного управления датчиком кислорода.
На ФИГ. 7 показан график, иллюстрирующий работу типового датчика кислорода.
Осуществление изобретения
Предложены различные способы применения датчика кислорода. В одном примере способ эксплуатации датчика кислорода содержит приложение мощности к нагревателю датчика кислорода и извещение о том, контактирует ли вода с датчиком кислорода, на основе скорости изменения температуры датчика кислорода. На ФИГ. 1 показана структурная схема, представляющая типовой двигатель, на ФИГ. 2 показана структурная схема типового датчика кислорода, на ФИГ. 3 показано сопротивление нагревателя и импеданс чувствительного элемента датчика в зависимости от температуры типового датчика кислорода, на ФИГ. 4 показана блок-схема, иллюстрирующая способ управления датчиком кислорода, на ФИГ. 5 показана блок-схема, иллюстрирующая способ управления датчиком кислорода на основе контакта воды с датчиком, на ФИГ. 6 показана блок-схема, иллюстрирующая способ штатного управления датчиком кислорода, и на ФИГ. 7 показан график, иллюстрирующий работу типового датчика кислорода. Двигатель на ФИГ. 1 также содержит контроллер, выполненный с возможностью реализации способов, представленных на ФИГ. 4-6.
На ФИГ. 1 изображена структурная схема, показывающая типовой двигатель 10, который может входить в состав системы обеспечения движения автомобиля. Двигатель 10 показан с четырьмя цилиндрами 30. Однако в соответствии с настоящим раскрытием изобретения может использоваться и другое количество цилиндров. Управление двигателем 10 может по меньшей мере частично осуществляться с помощью системы управления, содержащей контроллер 12, а также входных данных от водителя 132 транспортного средства, подаваемых с помощью устройства 130 ввода. В этом примере устройство 130 ввода содержит педаль акселератора и датчик 134 положения педали для генерации пропорционального сигнала положения педали (ПП). Каждая камера 30 сгорания (т.е. цилиндр) двигателя 10 может содержать стенки камеры сгорания с поршнем (не показан), расположенным в ней. Поршни 36 могут быть соединены с коленчатым валом 40 таким образом, чтобы возвратно-поступательное движение поршня преобразовывалось во вращательное движение коленчатого вала. Коленчатый вал 40 может быть присоединен по меньшей мере к одному приводному колесу транспортного средства с помощью системы промежуточной трансмиссии (не показана). Кроме того, стартер может быть соединен с коленчатым валом 40 с помощью маховика, позволяя осуществлять операцию запуска двигателя 10.
Камеры 30 сгорания могут принимать впускной воздух из впускного коллектора 44 через впускной канал 42 и выпускать газы, выделяющиеся при горении, через выпускной канал 48. Впускной коллектор 44 и выпускной коллектор 46 могут выборочно сообщаться с камерой 30 сгорания через соответствующие впускные клапаны и выпускные клапаны (не показаны). В некоторых вариантах осуществления камера 30 сгорания может содержать два или больше впускных клапанов и/или два или больше выпускных клапанов.
Топливные форсунки 50 показаны соединенными непосредственно с камерой 30 сгорания для впрыскивания в нее топлива пропорционально длительности импульса впрыска топлива (ИВТ), принятого от контроллера 12. Таким образом, топливная форсунка 50 обеспечивает так называемый непосредственный впрыск топлива в камеру 30 сгорания. Топливная форсунка может также монтироваться сбоку от камеры сгорания или наверху камеры сгорания, например. Топливо можно подводить к топливной форсунке 50 при помощи топливной системы (не показана), включающей в себя топливный бак, топливный насос и топливную рампу. В некоторых вариантах осуществления камеры 30 сгорания может альтернативно или дополнительно включать, в себя топливную форсунку, расположенную во впускном коллекторе 44 в конфигурации, обеспечивающей так называемый распределительный впрыск топлива во впускное окно выше по потоку от каждой камеры 30 сгорания.
Впускной канал 42 может содержать дроссели 21 и 23, имеющие дроссельные заслонки 22 и 24 соответственно. В этом конкретном примере положение дроссельных заслонок 22 и 24 может изменяться контроллером 12 с помощью сигналов, подаваемых на исполнительный механизм, входящий в состав дросселей 21 и 23. В одном примере исполнительные механизмы могут представлять собой электрические исполнительные механизмы (например, электродвигатели), причем такую конфигурацию обычно называют электронной системой управления положением дроссельной заслонки (ЭСУПДЗ). Таким образом, дроссели 21 и 23 могут приводиться в действие для изменения параметров впускного воздуха, подаваемого к камере 30 сгорания наряду с другими цилиндрами двигателя. Данные о положении дроссельных заслонок 22 и 24 могут предоставляться контроллеру 12 сигналом положения дросселя (ПД). Впускной канал 42 может содержать датчик 120 массового расхода воздуха, датчик 122 давления воздуха в коллекторе и датчик 123 давления на входе дросселя для передачи соответствующих сигналов массового расхода воздуха (МРВ) и давления воздуха в коллекторе (ДВК) контроллеру 12.
Выпускной канал 48 может принимать отработавшие газы из цилиндров 30. Датчик 128 отработавших газов показан соединенным с выпускным каналом 48 выше по потоку от турбины 62 и устройства 78 снижения токсичности отработавших газов. Датчик 128 может быть выбран из числа любых подходящих датчиков для обеспечения индикации воздушно-топливного отношения в отработавших газах, таких как линейный широкополосный кислородный датчик (УДКОГ) (универсальный или широкодиапазонный датчик кислорода в отработавших газах), узкополосный кислородный датчик с двумя состояниями или датчик кислорода в отработавших газах (ДКОГ), датчик окислов азота (NOx), концентрации водорода (НС) или угарного газа (СО), например. Устройство 78 снижения токсичности может представлять собой трехкомпонентный каталитический нейтрализатор (ТКН), ловушку для окислов азота (NOx), различные другие устройства снижения токсичности отработавших газов или их комбинации.
На ФИГ. 1 изображен также датчик 129 впускного воздуха, подключенный к впускному каналу 42. Датчик 129 может представлять собой любой подходящий датчик для обеспечения индикации содержания кислорода во впускном воздухе, такой как линейный широкополосный кислородный датчик (УДКОГ) (универсальный или широкодиапазонный датчик кислорода в отработавших газах), узкополосный кислородный датчик с двумя состояниями или датчик кислорода в отработавших газах (ДКОГ), нагреваемый датчик кислорода в отработавших газах (НДКОГ), датчик окислов азота (NOx), концентрации водорода (НС) или угарного газа (СО), например. В некоторых вариантах реализации как датчик 128, так и датчик 129 могут входить в состав двигателя 10, как показано на ФИГ. 1, тогда как в другие варианты реализации может быть включен один, но не другой из датчиков 128 и 129.
Температура отработавших газов может измеряться одним или более датчиками температуры (не показаны), расположенными в выпускном канале 48. В других вариантах осуществления температура отработавших газов может быть получена на основе условий работы двигателя, таких как скорость, нагрузка, ВТО, запаздывание зажигания и т.д.
Контроллер 12 представлен на ФИГ. 1 в виде микрокомпьютера, содержащего микропроцессорное устройство 102 (МПУ), порты 104 ввода/вывода, электронную среду хранения выполняемых программ и калибровочных значений, в данном конкретном примере показанную в виде постоянного запоминающего устройства 106 (ПЗУ), оперативное запоминающее устройство 108 (ОЗУ), энергонезависимое запоминающее устройство 110 (ЭЗУ) и шину данных. Контроллер 12 может принимать, в дополнение к рассмотренным выше сигналам, разнообразные сигналы от связанных с двигателем 10 датчиков, среди которых можно назвать: показание массового расхода воздуха (МРВ) от датчика 120 массового расхода воздуха; показание температуры хладагента двигателя (ТХД) от датчика 112 температуры, схематически показанного в одном месте внутри двигателя 10; сигнал профиля зажигания (ПЗ) от датчика 118 на эффекте Холла (или датчика иного типа), связанного с коленчатым валом 40; положения дросселя (ПД) от датчика положения дросселя, как было указано выше; сигнал абсолютного давления воздуха в коллекторе (ДВК) от датчика 122, как было указано выше. Сигнал частоты вращения двигателя (ЧВД) может быть сгенерирован контроллером 12 из сигнала ПЗ. Сигнал ДВК от датчика давления во впускном коллекторе можно использовать для индикации разряжения или давления во впускном коллекторе 44. Следует отметить, что могут применяться различные комбинации указанных выше датчиков, такие как датчик МРВ без датчика ДВК, или наоборот. При работе в стехиометрическом режиме датчик ДВК может обеспечивать индикацию крутящего момента двигателя. Кроме того, этот датчик, наряду с регистрируемой частотой вращения двигателя, может обеспечивать оценку заряда (в том числе заряда воздуха), всасываемого в цилиндр. В одном примере датчик 118, который также применяется в качестве датчика частоты вращения двигателя, может формировать заданное число равномерно распределенных импульсов при каждом обороте коленчатого вала 40. В некоторых примерах постоянное запоминающее устройство 106 среды хранения может быть запрограммировано с помощью машиночитаемых данных, представляющих команды, исполняемые процессором 102 для осуществления раскрытых ниже способов, а также других вариантов, предполагаемых, но не перечисленных конкретно.
Двигатель 10 может дополнительно содержать компрессионное устройство, такое как турбонагнетатель или воздушный нагнетатель, включающий в себя по меньшей мере компрессор 60, расположенный вдоль впускного коллектора 44. В случае турбонагнетателя компрессор 60 может по меньшей мере частично приводиться в действие турбиной 62, при помощи, например, вала или другого соединительного устройства. Турбина 62 может располагаться вдоль выпускного канала 48 и взаимодействовать с протекающими по нему отработавшими газами. Для приведения в действие компрессора могут предусматриваться различные устройства. В случае воздушного нагнетателя компрессор 60 может по меньшей мере частично приводиться в действие двигателем и/или электромашиной, и не может включать в себя турбину. Таким образом, степень сжатия, обеспечиваемая для одного или нескольких цилиндров двигателя с помощью турбонагнетателя или воздушного нагнетателя, может изменяться контроллером 12. В некоторых случаях турбина 62 может приводить в действие, например, электрогенератор 64 для обеспечения питания аккумуляторной батареи 66 при помощи турбопривода 68. Питание от аккумуляторной батареи 66 может в дальнейшем использоваться для приведения в действие компрессора 60 при помощи двигателя 70. Кроме того, для обеспечения сигнала НАДДУВ для контроллера 12 во впускном коллекторе 44 может располагаться датчик 123.
Кроме того, выпускной канал 48 может содержать перепускную заслонку 26 для отвода отработавших газов от турбины 62. В некоторых вариантах осуществления перепускная заслонка 26 может представлять собой многоступенчатую перепускную заслонку, такую как двухступенчатая перепускная заслонка с первой ступенью, выполненной с возможностью управления давлением наддува, и второй ступенью, выполненной с возможностью увеличения теплового потока для устройства 78 снижения токсичности отработавших газов. Перепускная заслонка 26 может работать при помощи исполнительного механизма 150, который может представлять собой электрический исполнительный механизм, такой как электродвигатель, например, хотя могут быть предусмотрены и пневматические исполнительные механизмы. Впускной канал 42 может содержать байпасный клапан 27 компрессора, выполненный с возможностью отвода впускного воздуха в обход компрессора 60. Управление перепускной заслонкой 26 и/или байпасным клапаном 27 компрессора может осуществляться контроллером 12 при помощи исполнительных механизмов (например, исполнительного механизма 150), выполняющих открывание, если требуется более низкое давление наддува, например.
Впускной канал 42 может дополнительно содержать охладитель 80 наддувочного воздуха (ОНВ) (например, промежуточный охладитель) для снижения температуры турбонагнетаемых всасываемых газов. В некоторых вариантах осуществления охладитель 80 наддувочного воздуха может представлять собой теплообменник «воздух-воздух». В некоторых вариантах осуществления охладитель 80 наддувочного воздуха может представлять собой теплообменник «воздух-жидкость».
Кроме того, в раскрытых вариантах осуществления система рециркуляции отработавших газов (РОГ) может направлять требуемую часть отработавших газов из выпускного канала 48 во впускной канал 42 по каналу 140 РОГ. Величина РОГ, обеспечиваемая для впускного канала 42, может изменяться контроллером 12 с помощью клапана 142 РОГ. Кроме того, датчик РОГ (не показан) может быть расположен внутри канала РОГ и обеспечивать индикацию одного или несколько из таких параметров, как давление, температура и концентрация отработавших газов. В качестве альтернативы управление системой РОГ может быть реализовано на основании расчетных значений по сигналам от датчика МРВ (выше по потоку), датчика ДВК (во впускном коллекторе), датчика температуры воздуха в коллекторе (ТВК) и датчика частоты прокручивания двигателя. Кроме того, управление системой РОГ может быть реализовано на основании показаний датчика O2 (содержания кислорода) в отработавших газах и/или датчика содержания кислорода во впускном воздухе (впускном коллекторе).
Например, процент разжижения всасываемой смеси в системе РОГ в данный момент времени (например, доля сгоревших газов в воздухе во впускном канале двигателя) может быть получен по выходному сигналу датчика 129 впускного воздуха (например, датчика содержания кислорода во впускном воздухе). Конкретно, при уменьшении концентрации кислорода на входе может быть получено значение увеличения РОГ, поскольку наличие системы РОГ может привести к разжижению кислорода в потоке на входе датчика 129 впускного воздуха. И наоборот, при возрастании концентрации кислорода на входе может быть получено значение уменьшения РОГ вследствие снижения рециркуляции отработавших газов. Контроллер 12 может оценивать процент разжижения потока РОГ на основе сигнала обратной связи от датчика 129 впускного воздуха. Кроме того, контроллер 12 может оценивать величину РОГ или скорость потока РОГ на основе сигнала обратной связи от датчика 129 впускного воздуха. В некоторых примерах контроллер 12 может затем регулировать одно или более из таких устройств, как клапан 142 РОГ, дроссель 23, байпасный клапан 27 компрессора и перепускная заслонка 26, для достижения требуемого процента разжижения всасываемой смеси в системе РОГ и (или) требуемой скорости потока РОГ.
При некоторых условиях систему РОГ можно использовать для регулирования температуры воздуха и топливной смеси в камере сгорания. На ФИГ. 1 показана система РОГ высокого давления, где РОГ проходит от участка выше по потоку от турбины турбонагнетателя к участку ниже по потоку от компрессора турбонагнетателя. В других вариантах осуществления двигатель может дополнительно или альтернативно включать в себя систему РОГ низкого давления, где РОГ проходит от участка ниже по потоку от турбины турбонагнетателя к участку выше по потоку от компрессора турбонагнетателя.
На ФИГ. 2 показано схематическое изображение примера осуществления датчика 200 кислорода, выполненного с возможностью измерения концентрации кислорода (O2) в потоке впускного воздуха во впускном канале или потока отработавших газов в выпускном канале. В некоторых примерах датчик 200 может представлять собой датчик УДКОГ. Датчик 200 может, таким образом, соответствовать одному или обоим датчикам 128 и 129 на ФИГ. 1, например. Однако следует понимать, что датчики 128 и 129 могут отличаться в некоторых отношениях от датчика 200, например, в них могут применяться одна или более модификаций.
Как показано на ФИГ. 2, датчик 200 содержит несколько слоев из одного или более керамических материалов, расположенных в многоярусной конфигурации. В варианте осуществления на ФИГ. 2 пять керамических слоев показаны в виде слоев 201, 202, 203, 204 и 205. Эти слои содержат один или более слоев твердого электролита, способного проводить ионогенный кислород. Примеры подходящих твердых электролитов содержат, без ограничений, материалы на основе двуокиси циркония. Кроме того, в некоторых вариантах осуществления нагреватель 207 может находиться в тепловом контакте со слоями для увеличения ионной проводимости слоев. Хотя показанный датчик кислорода образован из пяти керамических слоев, следует понимать, что датчик кислорода может содержать и другое подходящее количество керамических слоев.
Слой 202 содержит материал или материалы, создающие диффузионный путь 210. Диффузионный путь 210 выполнен с возможностью введения газов в первую внутреннюю полость 222 при помощи диффузии. Диффузионный путь 210 может быть выполнен с возможностью обеспечения диффузии одного или более компонентов впускного воздуха или отработавших газов, включая, без ограничений, требуемое анализируемое вещество (например, O2), во внутреннюю полость 222 с более ограниченной скоростью по сравнению с закачиванием или выкачиванием анализируемого вещества при помощи пары электродов 212 и 214 накачки. Таким образом, стехиометрический уровень O2 может быть получен в первой внутренней полости 222.
Датчик 200 дополнительно содержит вторую внутреннюю полость 224 в слое 204, отделенную от первой внутренней полости 222 слоем 203. Вторая внутренняя полость 224 выполнена с возможностью поддержания постоянного парциального давления кислорода, эквивалентного стехиометрическому состоянию; например, уровень кислорода, присутствующего во второй внутренней полости 224, был бы равен его уровню во впускном воздухе или отработавших газах, если бы воздушно-топливное отношение было стехиометрическим. Концентрация кислорода во второй внутренней полости 224 поддерживается постоянной напряжением накачки Vcp. При этом вторая внутренняя полость 224 может называться эталонной ячейкой.
Пара чувствительных электродов 216 и 218 контактирует с первой внутренней полостью 222 и эталонной ячейкой 224. Пара чувствительных электродов 216 и 218 определяет градиент концентрации, который может образоваться между первой внутренней полостью 222 и эталонной ячейкой 224 за счет концентрации кислорода во впускном воздухе или отработавших газах, более высокой или более низкой, чем стехиометрический уровень. Высокая концентрация кислорода может быть вызвана бедной смесью впускного воздуха или отработавших газов, тогда как низкая концентрация кислорода может быть вызвана богатой смесью.
Пара электродов 212 и 214 накачки контактирует с внутренней полостью 222 и выполнена с возможностью электрохимического выкачивания выбранной составляющей газа (например, O2) из внутренней полости 222 через слой 201 и из датчика 200. В альтернативном варианте осуществления пара электродов 212 и 214 накачки может быть выполнена с возможностью электрохимического закачивания выбранной составляющей газа через слой 201 во внутреннюю полость 222. При этом пара электродов 212 и 214 накачки может называться ячейкой накачки O2.
Электроды 212, 214, 216 и 218 могут быть выполнены из различных подходящих материалов. В некоторых вариантах осуществления электроды 212, 214, 216 и 218 могут быть по меньшей мере частично выполнены из материала, катализирующего диссоциацию молекулярного кислорода. Примеры таких материалов содержат, без ограничений, электроды, содержащие платину и/или серебро.
Процесс электрохимического выкачивания или закачивания кислорода из/во внутреннюю полость 222 содержит приложение напряжения Vp к паре электродов 212 и 214 накачки. Напряжение накачки Vp, прикладываемое к ячейке накачки O2, закачивает или выкачивает кислород в/из первой внутренней полости 222 для поддержания стехиометрического уровня кислорода в ячейке накачки полости. Результирующий ток накачки lp пропорционален концентрации кислорода в отработавших газах. Специальная система управления (не показана на ФИГ. 2) генерирует сигнал тока накачки lp как функцию величины приложенного напряжения накачки Vp, необходимого для поддержания стехиометрического уровня внутри первой внутренней полости 222. Таким образом, бедная смесь обусловливает выкачивание кислорода из внутренней полости 222, а богатая смесь обусловливает закачивание кислорода во внутреннюю полость 222.
Следует понимать, что датчик кислорода, раскрытый в настоящей заявке, представляет собой просто пример осуществления датчика кислорода, и что другие варианты осуществления датчиков кислорода могут иметь дополнительные и/или альтернативные характеристики и/или конструкции.
Хорошо известно, что проводимость материала изменяется с температурой. Для электролита с кислородно-ионной проводимостью, такого как диоксид циркония, ионная проводимость, как правило, возрастает с увеличением температуры. На проводимость циркония могут воздействовать и другие факторы, такие как примеси, границы зерен, структура и геометрия. При неизменяемой геометрии и структуре импеданс (представляющий собой обратную величину проводимости) диоксид-циркониевого элемента непосредственно связан с температурой элемента. Таким образом, температура чувствительного элемента датчика кислорода может быть определена путем измерения импеданса чувствительного элемента датчика кислорода. Импеданс чувствительного элемента датчика кислорода можно измерить путем измерения падения напряжения на чувствительном элементе датчика кислорода (например, путем использования метода на переменном токе). Для датчика 200 кислорода импеданс чувствительного элемента может быть, в частности, измерен на чувствительной ячейке 226, содержащей слой 203 и электроды 216 и 218, или ячейке 228 накачки, содержащей слой 201 и электроды 212 и 214, например. При таком подходе измерение импеданса ячейки может быть основано на приложенном напряжении и результирующем токе, связанном с этой ячейкой - например, импеданс ячейке 228 накачки может быть определен на основе напряжения накачки Vp, приложенного к ячейке накачки, и результирующего тока lp. Импеданс чувствительной ячейки 226 можно определить аналогичным образом на основе напряжения накачки, приложенного к чувствительной ячейке, и результирующего тока накачки.
При некоторых подходах импеданс датчика кислорода используется для управления температурой датчика кислорода. Поскольку, как описано выше, импеданс чувствительного элемента датчика кислорода может использоваться в качестве индикации температуры чувствительного элемента датчика, при этом импеданс чувствительного элемента датчика может измеряться в реальном времени и использоваться для управления его температурой - например, управление выходной мощностью нагревателя, такого как нагреватель 207, может осуществляться в режиме управления с замкнутым контуром для минимизации разности между требуемым импедансом чувствительного элемента датчика и фактическим (например, измеренным) импедансом чувствительного элемента датчика и, таким образом, для минимизации разности между требуемой температурой датчика и фактической температурой датчика. Таким путем датчику кислорода можно придать требуемую температуру датчика путем управления выходной мощностью нагревателя в соответствии с импедансом.
Однако импеданс некоторых чувствительных элементов датчика кислорода (например, концентрационных ячеек) возрастает (например, экспоненциально) при уменьшении температуры чувствительного элемента датчика. При температурах, меньших или равных пороговой температуре, импеданс чувствительного элемента датчика кислорода может быть запретительно высоким для измерения. В связи с этим температура чувствительного элемента датчика не может быть определена при помощи измерения импеданса при пороговой или более низкой температуре. В некоторых конфигурациях пороговая температура часто может не достигаться - например, температура датчика кислорода (такого, как датчик 200), выполненного с возможностью измерений в автомобильном транспортном средстве может быть ниже пороговой температуры после холодного пуска соответствующего двигателя (например, двигателя 10 на ФИГ. 1). Такие холодные пуски могут происходить на регулярной основе. Вследствие этого температура датчика кислорода может быть недоступна в течение значительных интервалов срока службы транспортного средства, что может привести к увеличению выбросов и нежелательной работе двигателя.
Соответственно, в зависимости от различных условий работы, для измерения температуры датчика 200 кислорода в дополнение или вместо импеданса могут использоваться другие данные. Например, для оценки температуры датчика 200 кислорода можно использовать сопротивление нагревателя 207. В некоторых примерах нагреватель 207 может быть выполнен из материала (например, платины), сопротивление которого прямо пропорционально его температуре. Поскольку температура нагревателя 207 коррелирует с температурой датчика 200 кислорода, температуру нагревателя можно использовать для оценки температуры датчика кислорода в целом. Кроме того, температура нагревателя может быть в достаточной степени измерена в относительно широком диапазоне температур (например, от -273,15°С до более чем 900°С), включая температуры, более низкие, чем пороговая, при которой и ниже которой измерение импеданса чувствительного элемента датчика кислорода больше не является осуществимым. Соответственно измеренную температуру нагревателя 207 (например, определенную путем измерения сопротивления нагревателя) можно использовать для определения температуры датчика 200 кислорода при и ниже пороговой температуры (например, 550°С). Выше пороговой температуры импеданс чувствительного элемента датчика кислорода (например, импеданс чувствительной ячейки 226 или ячейки 228 накачки) можно использовать для определения температуры датчика 200 кислорода. В некоторых примерах выше пороговой температуры можно использовать как сопротивление нагревателя, так и импеданс чувствительного элемента датчика.
Для определения температуры датчика 200 кислорода сопротивление нагревателя и импеданс чувствительного элемента датчика можно комбинировать различными подходящими способами - например, может вычисляться взвешенное среднее двух величин, при этом температуру датчика определяют на основе взвешенного среднего. В некоторых примерах одно или оба из сопротивления нагревателя и импеданса чувствительного элемента датчика можно выбирать и, вероятно, комбинировать на основе предварительных сведений о том, что в некотором диапазоне температур один параметр точнее другого. Например, температура датчика кислорода может предпочтительно определяться на основе температуры нагревателя для диапазона температур, о котором известно, что измерение температуры по сопротивлению нагревателя дает показания с уменьшенным пределом допуска и более высокой точностью, чем полученные по импедансу чувствительного элемента. Этот диапазон температур может быть первым, более низким диапазоном температур, включая температуры холодного пуска двигателя до 550°С, например. Аналогичным образом, температура датчика кислорода может предпочтительно определяться на основе импеданса чувствительного элемента для диапазона температур, о котором известно, что измерение температуры по импедансу дает показания с более высокой точностью, чем полученные по сопротивлению нагревателя. Этот диапазон температур может быть вторым, более высоким диапазоном температур, включая температуры от 550°С до максимальной рабочей температуры двигателя.
Поскольку сопротивление нагревателя 207 коррелирует с температурой датчика 200 кислорода ниже, при или выше пороговой температуры, сопротивление нагревателя может использоваться для постоянного определения температуры датчика кислорода на всем протяжении работы датчика. Если, напротив, сопротивление нагревателя 207 указывает на температуру, более низкую или равную пороговой температуре, только это сопротивление может использоваться для определения температуры датчика 200 кислорода. Если, напротив, сопротивление нагревателя 207 указывает на температуру, более высокую, чем пороговая температура, затем может быть выполнено измерение импеданса чувствительного элемента датчика кислорода, при этом измеренные сопротивление и импеданс используются для определения температуры датчика 200 кислорода, как описано выше.
На ФИГ. 3 показано сопротивление нагревателя и импеданс чувствительного элемента в зависимости от температуры типового датчика кислорода. Типовой датчик кислорода может соответствовать одному или более из датчиков кислорода 128, 129 и 200. Сопротивление нагревателя может представлять собой сопротивление нагревателя 207, тогда как импеданс чувствительного элемента может представлять собой импеданс ячейки 228 накачки, например. В показанном примере сопротивление нагревателя связано с температурой в качестве линейной функции, в связи с чем сопротивление нагревателя может использоваться для определения температуры датчика кислорода. Однако импеданс чувствительного элемента уменьшается экспоненциально как функция температуры. При температурах, более низких или равных пороговой температуре 302 (например, 550°С), импеданс чувствительного элемента является запретительно высоким для измерения и в связи с этим не может использоваться для определения температуры датчика кислорода. Однако при температурах выше пороговой температуры 302 импеданс чувствительного элемента становится достаточно низким (например, 1050 Ом) для измерения и определения температуры датчика кислорода. Вследствие этого при температурах, равных или или более низких, чем пороговая температура 302, для определения температуры датчика кислорода можно использовать сопротивление нагревателя, а не импеданс чувствительного элемента, однако при температурах выше пороговой можно использовать как сопротивление нагревателя, так и импеданс чувствительного элемента.
Благодаря такому использованию сопротивления нагревателя и выборочному применению импеданса чувствительного элемента датчика кислорода температура датчика 200 кислорода может быть известна в течение большей части и, в некоторых примерах, в течение всей работы датчика (и, в некоторых примерах, двигателя) по сравнению с другими подходами. Это может увеличить продолжительность времени, при котором осуществляется штатное управление датчиком 200 кислорода (например, в режиме с замкнутым контуром) и сократить время, занимаемое инициированием штатного управления датчиком кислорода, в свою очередь, увеличивая общую точность управления датчиком кислорода, уменьшая выбросы двигателя и повышая топливную экономичность.
Как описано выше, температурой датчика 200 кислорода можно управлять путем управления выходной мощностью (например, нагреванием) нагревателя 207. Нагревателем 207 можно управлять частично на основе требуемой температуры датчика кислорода; температуру датчика 200 кислорода можно измерять описанным выше способом, управляя нагревателем для минимизации разности между измеренной и требуемой температурами датчика кислорода. Нагревателем 207 можно также управлять в соответствии с присутствием воды - например, управление нагревателем может осуществляться по-разному в зависимости от того, обнаружен ли контакт воды с датчиком 200 кислорода. Режим нагревания нагревателя 207 можно изменять таким способом для предотвращения растрескивания, которое в противном случае может произойти в датчике 200 кислорода в результате штатного нагрева датчика, когда вода контактирует с датчиком. Без изменения режима работы нагревателя в соответствии с присутствием воды датчик кислорода может нагреваться путем приложения номинальных (штатных) уровней мощности к нагревателю, что может вызвать температурный удар датчика вследствие контакта с водой; номинальные уровни мощности являются избыточными для нагревания при наличии контакта с водой, но подходящими для нагревания в отсутствие контакта с водой. Такой температурный удар может привести к появлению трещин в датчике кислорода, ухудшая его чувствительность и, тем самым, работу двигателя.
При некоторых подходах температурного удара и растрескивания в датчике можно избежать, управляя нагревателем датчика в соответствии с температурой точки росы. При этом температуру отработавших газов контролируют, чтобы определить, когда она достигнет температуры точки росы, представляющей собой заданную температуру, при которой делается вывод о том, что вода в отработавшем газе испарилась. Однако при некоторых условиях неиспарившаяся вода может, тем не менее, оставаться в контакте с датчиком кислорода даже после достижения температуры точки росы - например, может оставаться замутненная вода, скопившаяся на датчике кислорода. Альтернативно или дополнительно, неиспарившаяся вода может оставаться в отработавших газах и/или вообще в системе выпуска отработавших газов. Кроме того, даже если вода на датчике испарилась после достижения температуры точки росы, в дальнейшем в контакт с датчиком может вступить дополнительная вода (например, из-за брызгов воды). При некоторых подходах это усугубляется приложением максимальной мощности к нагревателю датчика кислорода, поскольку при этих подходах максимальная мощность может быть приложена до тех пор, пока датчик кислорода не достигнет своей рабочей (например, требуемой) температуры; при наличии контакта с водой максимальная мощность прилагается в течение периода увеличенной продолжительности с учетом времени, требующегося для испарения воды. Приложение максимальной мощности с увеличенной продолжительностью может также вызвать растрескивание, ведущее к ухудшению параметров датчика кислорода. После достижения рабочей температуры датчика кислорода температурой датчика можно управлять в режиме управления с замкнутым контуром. Однако такое управление с замкнутым контуром может вызвать почти немедленное возрастание мощности нагревателя до максимальной мощности в ответ на попадание брызгов воды на датчик кислорода. Это немедленное возрастание до максимальной мощности в дополнение к постоянно прикладываемой мощности может вызвать появление трещин в датчике и, тем самым, ухудшение параметров датчика.
При некоторых подходах попадание воды на датчик кислорода стремятся обнаруживать на основе тока накачки. Хотя это может быть пригодно для некоторых конфигураций датчика кислорода, для других конфигураций такой подход может оказаться неприемлемым - например, ток накачки можно использовать для обнаружения попадания воды на датчик в случае датчика кислорода, расположенного в системе впуска двигателя, благодаря присутствию кислорода во впускном воздухе, но не в случае датчика кислорода, расположенного в системе выпуска отработавших газов двигателя, в связи с отсутствием кислорода в отработавшем газе. Ток накачки, связанный с датчиком кислорода, расположенным в системе выпуска отработавших газов, может оставаться в районе нуля даже в случае попадания воды. Это минимальное изменение тока накачки может оказаться недостаточным для обнаружения попадания воды. Хотя при некоторых подходах напряжение, прикладываемое к чувствительному элементу датчика кислорода (например, ячейке 228 накачки), может изменяться (например, для отделения кислорода от других соединений), это напряжение, как правило, изменяется только в течение небольших отрезков времени в особых условиях, при этом то и другое непригодно для обнаружения попадания воды на датчик кислорода.
Соответственно, в настоящем изобретении предложены механизмы для обнаружения попадания воды на датчик 200 кислорода в реальном времени на основе изменений температуры датчика кислорода и мощности, прикладываемой к нагревателю 207. Дополнительно предложены механизмы надлежащего управления датчиком 200 кислорода и нагревателя 207 при наличии контакта воды с датчиком.
Для обнаружения попадания воды на датчик 200 кислорода можно определить скорость изменения температуры датчика кислорода (например, на основе двух или более температур датчика кислорода, определенных согласно настоящему описанию) и сравнить ее с минимальной скоростью изменения температуры датчика кислорода, которая ожидается для мощности, прикладываемой к нагревателю 207. Если определенная скорость изменения температуры датчика кислорода меньше минимальной ожидаемой скорости изменения для приложенной мощности нагревателя, можно определить, что вода контактирует с датчиком 200 кислорода. Для определения минимальной ожидаемой скорости изменения для приложенной к нагревателю мощности могут применяться различные отвечающие требованиям подходы. Например, можно обратиться к просмотровой таблице, содержащей минимальные ожидаемые скорости изменения температуры датчика кислорода, связанной с уровнями мощности нагревателя; конкретная минимальная ожидаемая скорость изменения может быть извлечена путем обращения к просмотровой таблице с использованием значения мощности, прикладываемой к нагревателю 207. Минимальную ожидаемую скорость изменения температуры датчика кислорода можно определить автономно в тестовой среде, например, и использовать для заполнения просмотровой таблицы.
Если обнаружено попадание воды на датчик 200 кислорода, к нагревателю 207 может быть приложен относительно пониженный уровень мощности, определенный в качестве приемлемого для нагревания датчика даже при наличии контакта с водой. Пониженный уровень мощности может быть понижен относительно уровней мощности, прикладываемой к нагревателю 207 при штатном управлении датчиком 200 кислорода - например, когда определено, что вода не контактирует с датчиком. Штатное управление датчиком 200 кислорода может включать в себя управление с замкнутым контуром на основе требуемой температуры, как подробнее описано ниже. После приложения относительно пониженного уровня мощности к нагревателю 207 может быть определено, достигнута ли ожидаемая температура датчика 200 кислорода для мощности, прикладываемой к нагревателю (это определение может включать в себя обращение к подходящей структуре данных, такой как просмотровая таблица, содержащая ожидаемые температуры датчика кислорода, связанные с уровнями мощности нагревателя), и/или является ли скорость изменения температуры датчика кислорода большей или равной ожидаемой скорости изменения температуры датчика кислорода для приложенной к нагревателю мощности (например, путем обращения к просмотровой таблице, как описано выше). Ожидаемая температура датчика 200 кислорода может также представлять собой температуру, ожидаемую для различных внешних условий, таких как поток впускного воздуха, температура отработавших газов и т.д. При этом одно или более из этих внешних условий могут быть определены до того, как будет принята во внимание ожидаемая температура датчика кислорода.
Если одно или более из таких условий, как ожидаемая температура датчика кислорода и скорость изменения температуры датчика кислорода, удовлетворены, мощность, прикладываемая к нагревателю 207, может быть увеличена до порогового уровня мощности так, чтобы температура датчика кислорода возрастала при (например, до) максимально допустимой скорости. Максимально допустимая скорость может быть выбрана, чтобы избежать немедленного или неприемлемо быстрого возрастания, способного привести к ухудшению параметров датчика 200 кислорода, а пороговый уровень мощности может быть меньше, чем максимальный уровень мощности, которая может быть приложена к нагревателю 207; этот максимальный уровень мощности может представлять собой уровень мощности, приложенной к нагревателю, когда нагревание датчика кислорода достигает требуемой температуры датчика кислорода, если определено, что вода не контактирует с датчиком, например. После этого можно определить, находится ли вода по-прежнему в контакте с датчиком 200 кислорода. Если определено, что вода по-прежнему контактирует с датчиком кислорода, мощность, прикладываемую к нагревателю 207, можно постепенно увеличивать до тех пор, пока обнаруживается контакт воды с датчиком. Конкретнее, мощность нагревателя можно постепенно увеличивать до тех пор, пока обнаруживается контакт воды с датчиком 200 кислорода, если в контакте с датчиком находится относительно небольшое количество воды и температура датчика возрастает с минимальной ожидаемой скоростью. Количество воды может оцениваться на основе температуры и/или скорости изменения температуры датчика 200 кислорода; например, вывод об относительно большем количестве воды, контактирующей с датчиком, может быть сделан, если скорость изменения температуры датчика падает ниже ожидаемой скорости изменения температуры датчика на относительно большую величину. Если не определено, что вода контактирует с датчиком 200 кислорода, то мощность, прикладываемая к нагревателю 207, может быть увеличена до порогового уровня мощности, как описано выше. После достижения требуемой или рабочей температуры датчика 200 кислорода - например, температуры, при которой датчик кислорода обеспечивает требуемое измерение - может применяться штатное управление датчиком кислорода, которое может включать в себя управление с замкнутым контуром. Управление с замкнутым контуром позволяет управлять мощностью, подаваемой на нагреватель 207, для минимизации разности между температурой датчика 200 кислорода и требуемой или рабочей температурой, например. Наличие контакта воды с датчиком 200 кислорода может постоянно оцениваться в ходе штатного управления датчиком кислорода, однако обнаружение контакта с водой инициирует раскрытый в настоящей заявке режим управления, применяемый для работы датчика кислорода и нагревателя 207 при наличии контакта с водой.
Подходы, раскрытые в настоящей заявке, позволяют определять температуру датчика 200 кислорода после пуска двигателя, а также наличие контакта воды с датчиком. При наличии контакта с водой может осуществляться надлежащее управление датчиком 200 кислорода с целью избежать действий, которые могут привести к ухудшению параметров датчиков, таких как немедленное возрастание мощности нагревателя и постоянное приложение максимальной мощности к нагревателю. Это позволяет, в свою очередь, продлить срок службы датчика 200 кислорода. Время, требующееся для достижения рабочей температуры (например, температуры инициирования каталитических реакций) датчика 200 кислорода, также может быть уменьшено, что позволяет повысить топливную экономичность и дорожные качества и уменьшить выбросы двигателя. Кроме того, подходы, раскрытые в настоящей заявке, позволяют максимально увеличить скорость возвращения датчика 200 кислорода к рабочей температуре после возникновения контакта с водой - в частности, контакта с водой, возникающего после первоначального достижения датчиком кислорода своей рабочей температуры.
На ФИГ. 4 показана блок-схема, иллюстрирующая способ 400 управления датчиком кислорода. Способ 400 может использоваться для управления одним или более из датчиков кислорода 128, 129 и 200, например. Способ 400 может сохраняться в ПЗУ 106 в виде машиночитаемых команд, выполняемых МПУ 102, при этом оба устройства входят в состав контроллера 12 на ФИГ. 1, например. В некоторых примерах способ 400 содержит определение того, контактирует ли вода с датчиком кислорода, управление датчиком кислорода в соответствии с первой схемой управления, если вода контактирует с датчиком, и управление датчиком кислорода в соответствии со второй схемой управления, отличной от первой схемы управления, если вода не контактирует с датчиком.
На шаге 402 способа 400 определяют температуру датчика кислорода. Определение температуры датчика кислорода содержит на шаге 404 использование сопротивления нагревателя (например, нагревателя 207 на ФИГ. 2) датчика кислорода при определении температуры датчика кислорода. Как описано выше, импеданс чувствительного элемента датчика кислорода (например, чувствительной ячейки 226 или ячейки 228 накачки на ФИГ. 2) датчика кислорода может быть неприемлемо высоким для определения температуры датчика кислорода, равной или более низкой, чем пороговая температура. Однако сопротивление нагревателя может непосредственно коррелировать с температурой датчика кислорода во всем диапазоне рабочих температур. В связи с этим при температурах, равных или более низких, чем пороговая температура, может использоваться сопротивление нагревателя, а не импеданс чувствительного элемента датчика, тогда как при температурах, превышающих пороговую температуру, могут использоваться и сопротивление нагревателя, и импеданс чувствительного элемента датчика. Соответственно определение температуры датчика кислорода содержит на шаге 405 опциональное использование как сопротивления нагревателя, так и импеданса чувствительного элемента датчика при определении температуры датчика кислорода. Таким образом, в некоторых примерах за измерением температуры нагревателя может следовать измерение импеданса чувствительного элемента датчика, при этом как сопротивление нагревателя, так и импеданс чувствительного элемента датчика могут использоваться для определения температуры датчика кислорода. Использование как сопротивления нагревателя, так и импеданса чувствительного элемента датчика может включать в себя взвешивание и усреднение сопротивления и импеданса, например.
На шаге 406 способа 400 к нагревателю датчика кислорода прикладывают начальный уровень мощности. Начальный уровень мощности может представлять собой относительно низкий или пониженный, а в некоторых примерах минимальный уровень мощности, обусловливающий нагревание датчика кислорода, но недостаточно высокий, чтобы вызвать температурный удар и растрескивание в датчике, которые в противном случае могли бы произойти при наличии воды, контактирующей с датчиком при приложении мощности, превышающей начальный уровень. Конкретнее, начальный уровень мощности может быть достаточно высоким, чтобы вызвать изменение температуры датчика кислорода с минимальной требуемой скоростью (даже при наличии контакта воды с датчиком), так, чтобы скорость изменения температуры датчика кислорода можно было оценить с целью определения, контактирует ли вода с датчиком. Кроме того, начальный уровень мощности может быть пониженным относительно уровней мощности, применяемых при штатном управлении датчиком кислорода, подробнее раскрытом ниже.
На шаге 408 способа 400 определяют, контактирует ли вода с датчиком кислорода. Определение наличия контакта воды с датчиком кислорода, может включать в себя, на шаге 410, определение того, меньше ли скорость изменения температуры датчика кислорода (dT/dt), чем минимальная скорость изменения температуры датчика кислорода (dTex), ожидаемая для уровня мощности, прикладываемого к нагревателю (например, начального уровня мощности). Минимальная ожидаемая скорость изменения температуры датчика кислорода может быть определена путем обращения к просмотровой таблице, содержащей минимальные ожидаемые скорости изменения температуры датчика кислорода, связанной с уровнями мощности нагревателя, например. В некоторых примерах dT/dt может использоваться для получения вывода о количестве воды, находящейся в контакте с датчиком кислорода; например, если dT/dt падает ниже dTex на относительно большую величину, может быть сделан вывод об относительно большом количестве воды, тогда как если dT/dt падает ниже dTex на относительно небольшую величину, может быть сделан вывод об относительно небольшом количестве воды. Если определено, что скорость изменения температуры датчика кислорода меньше, чем минимальная скорость изменения температуры датчика кислорода, ожидаемая для уровня мощности, прикладываемого к нагревателю (ДА), на шаге 412 определяют, что вода контактирует с датчиком. Если определено, что скорость изменения температуры датчика кислорода не меньше, чем минимальная скорость изменения температуры датчика кислорода, ожидаемая для уровня мощности, прикладываемого к нагревателю (например, dT/dt больше или равно минимальному ожидаемому dT/dt) (ДА), на шаге 414 определяют, что вода не контактирует с датчиком. После шага 414 способ 400 продолжается на шаге 422, где осуществляется штатное управление датчиком кислорода, как подробнее раскрыто ниже на ФИГ. 6.
Следует понимать, что определить, контактирует ли вода с датчиком кислорода, можно с помощью других способов определения, альтернативных или дополнительных к оценке dT/dt. Например, если определено, что dT/dt=0, можно определить, что вода контактирует с датчиком кислорода. Кроме того, контакт воды с датчиком кислорода может быть определен, если температура датчика уменьшается на по меньшей мере пороговую величину в течение подходящего промежутка времени. Такое уменьшение температуры может, в частности, оцениваться после того, как штатное управление датчиком кислорода было использовано по меньшей мере один раз. Быстрое (например, немедленное) уменьшение температуры датчика кислорода относительно его рабочей температуры может указывать на попадание воды на датчик (например, вследствие события попадания брызгов воды). Следует также понимать, что до определения dT/dt могут быть выполнены два или более измерений температуры, чтобы значение dT/dt было определено в достаточной степени. Так как dT/dt может оцениваться в ответ на приложение начального уровня мощности к нагревателю, измерение температуры может выполняться после шага 406, но перед шагом 410.
После шага 412 способ 400 продолжается на шаге 416, где осуществляется управление датчиком кислорода на основе сделанного на шаге 410 определения того, что вода контактирует с датчиком. Обратимся теперь к ФИГ. 5, на котором показана блок-схема, иллюстрирующая способ 500 управления датчиком кислорода на основе контакта воды с датчиком. Способ 500 может использоваться для управления одним или более из датчиков кислорода 128, 129 и 200 в случае, когда определено, что на него попала вода, например.
На шаге 502 способа 500 к нагревателю датчика кислорода (например, нагревателю 207 на ФИГ. 2) прикладывают пониженный уровень мощности. В некоторых примерах пониженный уровень мощности представляет собой начальный уровень мощности, прикладываемой к нагревателю на шаге 406 способа 400, и в этом случае начальный уровень мощности по-прежнему остается приложенным к нагревателю после того, как определено, что вода вошла в контакт с датчиком кислорода. В других примерах пониженный уровень мощности больше, чем начальный уровень мощности - например, начальный уровень мощности представляет собой первый уровень мощности, а пониженный уровень мощности представляет собой второй уровень мощности, превышающий первый уровень мощности. Так или иначе, пониженный уровень мощности достаточно низок, чтобы датчик кислорода не подвергался температурному удару и растрескиванию.
На шаге 504 способа 500 определяют, достигнута ли ожидаемая температура датчика кислорода, или равна ли или больше скорость изменения температуры датчика кислорода (dT/dt), чем минимальная ожидаемая скорость изменения температуры датчика кислорода (dTex). Как ожидаемая температура датчика кислорода, так и минимальная ожидаемая скорость изменения температуры датчика кислорода могут быть ожидаемыми для мощности, прикладываемой к нагревателю (например, пониженного/второго уровня мощности) и одного или более внешних условий. Так как температура датчика кислорода (и/или скорость ее изменения) может оцениваться в ответ на приложение пониженного уровня мощности к нагревателю, измерение температуры может выполняться после шага 502, но перед шагом 504. Кроме того, определение одного или более внешних условий может быть выполнено как часть шага 504; например, одного или более внешних условий, таких как поток впускного воздуха, температура отработавших газов и т.д. Например, в качестве части шага 504 может быть выполнено обращение к подходящей структуре данных, (такой как просмотровая таблица), содержащей ожидаемые температуры датчика кислорода и/или минимальные ожидаемые скорости изменения температуры датчика для приложенных уровней мощности нагревателя и одного или более внешних условий. Если определено, что ожидаемая температура датчика кислорода не достигнута, или что dT/dt не превышает или не равно минимальному ожидаемому dT/dt (НЕТ), алгоритм способа 500 возвращается к шагу 504. Если определено, что ожидаемая температура датчика кислорода достигнута, или что dT/dt превышает или равно минимальному ожидаемому dT/dt (ДА), выполнение способа 500 возвращается к шагу 506.
На шаге 506 способа 500 мощность, прикладываемая к нагревателю, возрастает вплоть до порогового уровня мощности так, чтобы температура датчика кислорода возрастала с максимально допустимой скоростью. В некоторых примерах возрастание мощности, прикладываемой к нагревателю (например, вышеупомянутого пониженного/второго уровня мощности), может быть относительно постепенным - например, немгновенное возрастание от относительно пониженного уровня мощности до относительно повышенного уровня мощности. Пороговый уровень мощности может представлять собой относительно ограниченный уровень мощности - например, меньший, чем максимальный уровень мощности, но больший, чем пониженный уровень мощности и/или начальный уровень мощности. Максимально допустимая скорость, с которой может возрастать температура датчика кислорода, может быть меньше скорости, с которой температурный удар и растрескивание могут в противном случае быть вызваны в датчике кислорода. Пороговый уровень мощности и/или скорость возрастания температуры датчика кислорода могут быть выбраны на основе максимально допустимой скорости; в некоторых примерах для выбора порогового уровня мощности и/или скорости возрастания температуры на основе максимально допустимой скорости может осуществляться обращение к подходящей структуре данных, такой как просмотровая таблица. В некоторых примерах прикладываемая к нагревателю мощность может быть увеличена, если сделан вывод о том, что относительно небольшое количество воды, меньшее порогового количества, контактирует с датчиком кислорода, и если dT/dt остается большим или равным dTex. Таким образом, прикладываемая к нагревателю мощность не увеличивается, если предполагаемое количество воды, находящейся в контакте с датчиком кислорода, больше или равно пороговому количеству, и/или dT/dt не остается большим или равным dTex. В этом случае прикладываемая к нагревателю мощность может оставаться постоянной или уменьшаться, пока не будут удовлетворены одно или оба условия.
На шаге 508 способа 500 определяют, находится ли вода по-прежнему в контакте с датчиком кислорода. Контакт с водой может быть определен описанным выше способом (например, путем выполнения шага 408 способа 400). Если определено, что вода по-прежнему контактирует с датчиком кислорода (ДА), алгоритм способа 500 возвращается к шагу 506. Таким путем мощность нагревателя может непрерывно возрастать вплоть до порогового уровня мощности, пока обнаруживается контакт воды с датчиком кислорода. Если определено, что вода больше не контактирует с датчиком кислорода (НЕТ), выполнение способа 500 заканчивается.
Возвращаясь к ФИГ. 4, отметим, что выполнение способа 400 возобновляется на шаге 418 после завершения выполнения способа 500, при этом мощность, прикладываемая к нагревателю, возрастает вплоть до порогового уровня мощности так, чтобы температура датчика кислорода возрастала с максимально допустимой скоростью, как на шаге 506 способа 500.
На шаге 420 способа 400 определяют, достигнута ли рабочая температура датчика кислорода. Рабочая температура может представлять собой температуру, которая, при ее достижении датчиком кислорода, обеспечивает возможность выполнения требуемого измерения датчиком (например, температуру инициирования каталитических реакций). Если определено, что рабочая температура датчика кислорода не достигнута (НЕТ), алгоритм способа 400 возвращается к шагу 418. Таким путем мощность, прикладываемая к нагревателю, может итерационно возрастать до тех пор, пока рабочая температура датчика кислорода не будет достигнута, но не превышена. В связи с этим мощность, прикладываемая к нагревателю, может возрастать, а температура датчика кислорода определяться при различных подходящих частотах и различных подходящих промежутках времени для предотвращения ухудшения параметров датчиков при одновременной минимизации времени, затрачиваемого на достижение рабочей температуры. Если определено, что рабочая температура датчика кислорода достигнута (ДА), выполнение способа 400 продолжается на шаге 422.
На шаге 422 способа 400 управление датчиком кислорода осуществляется в штатном режиме. Управление датчиком кислорода также осуществляется в штатном режиме, если на шаге 414 было определено, что вода не контактирует с датчиком, как описано выше. Обратимся теперь к ФИГ. 6, на котором показана блок-схема, иллюстрирующая способ 600 штатного управления датчиком кислорода. Способ 600 может использоваться для штатного управления одним или более из датчиков кислорода 128, 129 и 200, например. В некоторых примерах способ 600 может применяться для штатного управления датчиком кислорода после достижения рабочей температуры вслед за попаданием на него воды, или если было определено, что вода не контактирует с датчиком.
На шаге 602 способа 600 определяют температуру датчика кислорода. Температура датчика кислорода может быть определена описанным выше способом - например, так, как она определяется на шаге 402 способа 400.
На шаге 604 способа 600 определяют рабочую точку температуры датчика кислорода. Рабочая точка температуры может представлять собой температуру, которой должна соответствовать температура датчика кислорода; например, рабочая точка температуры может представлять собой рабочую температуру датчика. В некоторых примерах рабочая точка температуры может быть предварительно задана, так, чтобы определение рабочей точки включало в себя извлечение предварительно заданной рабочей точки (например, путем обращения к подходящей структуре данных, содержащей рабочую точку).
На шаге 606 способа 600 к нагревателю датчика кислорода (например, нагревателю 207 на ФИГ. 2) прикладывают мощность исходя из разности между температурой датчика кислорода, определенной на шаге 602, и рабочей точкой температуры, определенной на шаге 604. Конкретнее, мощность, прикладываемую к нагревателю, можно выбирать таким образом, чтобы свести к минимуму разность между температурой датчика и рабочей точкой с целью привести температуру датчика в как можно более близкое соответствие с рабочей точкой. Управление мощностью нагревателя таким путем может включать в себя использование управления с замкнутым контуром, например, когда входной сигнал представляет собой погрешность (например, разность между температурой датчика кислорода и рабочей точкой температуры), а выходной сигнал - мощность нагревателя. При управлении с замкнутым контуром может применяться одно или более из пропорционального, интегрального или дифференциального регулирования, например.
На шаге 608 способа 600 определяют, контактирует ли вода с датчиком кислорода. Контакт с водой может быть определен описанным выше способом (например, путем выполнения шага 408 способа 400). Соответственно, в некоторых примерах до шага 608 могут быть выполнены два или более определений температуры датчика кислорода. Если определено, что вода не контактирует с датчиком кислорода (НЕТ), алгоритм способа 600 возвращается к шагу 602. Если определено, что вода контактирует с датчиком кислорода (ДА), выполнение способа 600 продолжается на шаге 610, где осуществляется управление датчиком кислорода на основе сделанного на шаге 608 определения того, что вода контактирует с датчиком. Управление датчиком кислорода может осуществляться на основе контакта с водой в соответствии со способом 500 на ФИГ. 5, описанным выше. Выполнение способа 600 может заканчиваться после выключения зажигания транспортного средства, например.
Следует понимать, что определение температуры датчика кислорода и наличия его контакта с водой может определяться при различных подходящих частотах и интервалах времени. Способ 600 может применяться для точного управления температурой датчика кислорода в соответствии с требуемой рабочей точкой температуры при одновременном контроле датчика на наличие контакта с водой в реальном времени. В случае обнаружения контакта воды с датчиком кислорода способ 600 обеспечивает возможность переключения управления со штатной схемы управления на схему управления, подходящую для наличия контакта с водой, избегая ухудшения параметров датчиков и максимально увеличивая скорость возвращения в режим штатного управления датчиком.
На ФИГ. 7 показан график 700, иллюстрирующий работу типового датчика кислорода. График 700 может, в частности, иллюстрировать работу одного или более из датчиков 128, 129 и 200 кислорода в соответствии со способами 400, 500 и 600, показанными на ФИГ. 4, 5 и 6 соответственно. В целом, график 700 показывает, каким образом может работать датчик кислорода в соответствии с различными схемами управления в зависимости от того, обнаружено ли попадание воды на датчик.
В начале графика 700 (например, начиная в момент времени t0) работа датчика кислорода и связанного с ним нагревателя (например, нагревателя 207 на ФИГ. 2) инициируется, например, в ответ на включение зажигания транспортного средства. С момента времени t0 до момента времени t1 к нагревателю прикладывают начальный и относительно низкий уровень мощности, чтобы начать подъем температуры датчика кислорода. На протяжении этого интервала времени вода контактирует с датчиком кислорода, поскольку в течение этого интервала определено, что скорость изменения температуры датчика кислорода меньше, чем скорость изменения температуры датчика кислорода, ожидаемая для мощности, прикладываемой к нагревателю, и одного или более из этих текущих внешних условий, что представлено на ФИГ. 7 пунктирными линиями.
Определив наличие контакта с водой к моменту времени t1, осуществляют управление датчиком кислорода в зависимости от контакта с водой, что в данном примере содержит приложение в момент времени t2 пониженного уровня мощности к нагревателю, являющегося в данном примере относительно более высоким, чем начальный уровень мощности, но относительно уменьшенным (например, меньшим, чем максимальный уровень мощности нагревателя). Как показано на графике, мощность, прикладываемая к нагревателю, постепенно линейно нарастает от начального уровня мощности до пониженного уровня мощности с момента времени t1 до момента времени t2, чтобы избежать чрезмерно быстрого увеличения мощности нагревателя, которое в противном случае может привести к ухудшению параметров датчика кислорода. Пониженный уровень мощности поддерживается с момента времени t2 до момента времени t3, в который достигается ожидаемая температура датчика кислорода и/или минимальная ожидаемая скорость изменения температуры датчика кислорода, причем оба параметра ожидаются для мощности, прикладываемой к нагревателю, и одного или более из внешних условий. С момента времени t3 до момента времени t4 мощность, прикладываемая к нагревателю, возрастает до порогового уровня мощности так, что температура датчика кислорода возрастает с максимально допустимой (или, в некоторых примерах, более низкой) скоростью до тех пор, пока обнаруживается контакт воды с датчиком. В связи с этим контакт воды с датчиком может постоянно определяться с подходящей частотой между моментами времени t3 и t4. Мощность, прикладываемая к нагревателю, может возрастать между моментами времени t3 и t4 до тех пор, пока не будет сделан вывод о том, что в контакте с датчиком кислорода находится относительно небольшое количество воды, и скорость изменения температуры датчика не будет большей или равной ожидаемой скорости изменения температуры датчика. В момент времени t4 контакт воды с датчиком кислорода больше не обнаруживается, и мощность, прикладываемая к нагревателю, возрастает до порогового уровня мощности так, что температура датчика кислорода возрастает с максимально допустимой (или, в некоторых примерах, более низкой) скоростью, как описано выше. В момент времени t5 достигается рабочая температура датчика кислорода (представленная на ФИГ. 7 штрих-пунктирными линиями) и активируется штатное (например, с замкнутым контуром) управление датчиком. В связи с этим, начиная с момента времени t5, рабочая температура датчика кислорода поддерживается путем регулирования мощности нагревателя в соответствии с разностью между фактической температурой датчика и требуемой рабочей точкой температуры (например, рабочей температурой).
Следует понимать, что график 700 приведен в качестве примера и не имеет какого-либо ограничительного характера. Например, форма, продолжительность и моменты времени, присущие параметрам на ФИГ. 7, представлены в качестве примеров и могут быть преувеличены в целях иллюстрации.
Варианты реализации могут обеспечивать способ управления датчиком кислорода, включающим в себя использование сопротивления нагревателя датчика для определения температуры датчика кислорода. Использование сопротивления нагревателя может способствовать определению температуры датчика кислорода в любой момент времени во время его работы. В связи с этим температура датчика не может быть неизвестной по существу ни в один момент времени во время работы датчика. Это обеспечивает возможность реализации подходов к обнаружению воды и управлению с замкнутым контуром, раскрытых в настоящей заявке, на датчике кислорода. Вследствие этого время, требующееся датчику кислорода для достижения рабочей температуры, может быть уменьшено, что снижает выбросы двигателя.
Варианты реализации могут дополнительно обеспечивать способ управления датчиком кислорода, который содержит приложение начального уровня мощности к нагревателю датчика кислорода. Способ может дополнительно содержать управление нагревателем по первой схеме управления в ответ на контакт воды с датчиком кислорода. Контакт воды с датчиком кислорода может быть определен по скорости изменения температуры датчика описанным выше способом. В противном случае (если определено, что вода не контактирует с датчиком), управление нагревателем осуществляется по второй схеме управления, отличной от первой схемы. Первая схема управления может включать в себя приложение второго уровня мощности к нагревателю, причем второй уровень мощности больше, чем начальный уровень мощности. Первая схема управления может дополнительно включать в себя извещение о том, что одна из ожидаемой температуры и минимальной ожидаемой скорости изменения температуры датчика достигнута датчиком кислорода, причем ожидаемая температура или минимальная ожидаемая скорость изменения температуры ожидаются для второго уровня мощности. Первая схема управления может дополнительно включать в себя, в ответ на извещение о том, что одна из ожидаемой температуры и минимальной ожидаемой скорости изменения температуры достигнута датчиком кислорода, увеличение мощности, прикладываемой к нагревателю, сверх второго уровня мощности вплоть до порогового уровня мощности так, чтобы температура датчика кислорода возрастала с максимально допустимой скоростью. Первая схема управления может дополнительно включать в себя извещение о том, контактирует ли еще вода с датчиком кислорода и, в ответ на извещение о том, что вода еще контактирует с датчиком кислорода, увеличение мощности, прикладываемой к нагревателю, вплоть до извещения о том, что вода больше не контактирует с датчиком кислорода. Затем, в ответ на извещение о том, что вода больше не контактирует с датчиком кислорода, мощность, прикладываемая к нагревателю может возрастать до тех пор, пока температура датчика кислорода не достигнет рабочей температуры. Первая схема управления может дополнительно включать в себя, в ответ на достижение температурой датчика кислорода рабочей температуры, управление нагревателем при помощи управления с замкнутым контуром. Управление с замкнутым контуром может включать в себя определение температуры датчика кислорода, определение рабочей точки температуры и приложение мощности к нагревателю в зависимости от разности между температурой датчика кислорода и рабочей точкой температуры. В целом, первая схема управления ограничивает величину и скорость возрастания мощности, прикладываемой к нагревателю датчика при наличии воды, что позволяет избежать чрезмерного увеличения мощности нагревателя, способного вызвать ухудшение параметров датчика.
Вторая схема управления может включать в себя определение температуры датчика кислорода, определение рабочей точки температуры и приложение мощности к нагревателю в зависимости от разности между температурой датчика кислорода и рабочей точкой температуры. В связи с этим, в некоторых примерах вторая схема управления может включать в себя управление с замкнутым контуром. В целом, вторая схема управления может обеспечить возможность приложения к нагревателю датчика более высоких уровней мощности по сравнению с первой схемой управления, и может применяться для поддержания температуры датчика как можно более близкой к рабочей точке температуры. В некоторых примерах мощность, прикладываемая к нагревателю, может колебаться при поддержании рабочей точки температуры.
Следует отметить, что включенные в настоящую заявку примеры алгоритмов управления и оценки могут использоваться с разнообразными конфигурациями систем двигателей и/или транспортных средств. Раскрытые в настоящей заявке способы и алгоритмы управления могут храниться в виде исполняемых инструкций в долговременной памяти и выполняться системой управления, включающей в себя контроллер в сочетании с различными датчиками, исполнительными механизмами и другим оборудованием двигателя. Раскрытые в настоящей заявке конкретные алгоритмы могут представлять собой одну или любое количество стратегий обработки, таких как управляемые событиями, управляемые прерываниями, многозадачные, многопотоковые и т.д. Таким образом, проиллюстрированные разнообразные действия, операции и/или функции могут выполняться в указанной последовательности, параллельно, а в некоторых случаях -могут опускаться. Точно так же указанный порядок обработки не обязательно требуется для достижения отличительных особенностей и преимуществ описываемых здесь вариантов осуществления изобретения, но служит для удобства иллюстрирования и описания. Одно или несколько из иллюстрируемых действий, операций и/или функций могут выполняться повторно в зависимости от конкретной применяемой стратегии. Кроме того, раскрытые действия, операции и/или функции могут графически изображать код, программируемый в долговременной памяти машиночитаемого носителя данных в системе управления двигателем, причем раскрытые действия реализуются путем выполнения команд в системе, включающей в себя различные компоненты оборудования двигателя в сочетании с электронным контроллером.
Следует понимать, что раскрытые в настоящем описании конфигурации и программы по своей сути являются лишь примерами, и что конкретные варианты осуществления не должны рассматриваться в ограничительном смысле, ибо возможны разнообразные их модификации. Например, вышеизложенная технология может быть применена к двигателям со схемами расположения цилиндров V-6, 1-4, 1-6, V-12, в схеме с 4-мя оппозитными цилиндрами и в двигателях других типов. Предмет настоящего изобретения содержит все новые и неочевидные комбинации и подкомбинации различных систем и схем, а также других отличительных признаков, функций и/или свойств, раскрытых в настоящем описании.
В нижеследующей формуле изобретения, в частности, указаны определенные комбинации и подкомбинации компонентов, которые считаются новыми и неочевидными. В таких пунктах формулы ссылка может быть сделана на «один» элемент или «первый» элемент или на эквивалентный термин. Следует понимать, что такие пункты могут включать в себя один или более указанных элементов, не требуя и не исключая двух или более таких элементов. Иные комбинации и подкомбинации раскрытых отличительных признаков, функций, элементов или свойств могут быть включены в формулу путем изменения имеющихся пунктов или путем представления новых пунктов формулы в настоящей или родственной заявке. Такие пункты формулы изобретения, независимо от того, являются они более широкими, более узкими, эквивалентными или отличающимися в отношении объема идеи первоначальной формулы изобретения, также считаются включенными в предмет настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ ДАТЧИКА КИСЛОРОДА НА ОСНОВАНИИ СОПРОТИВЛЕНИЯ И ИМПЕДАНСА (ВАРИАНТЫ) | 2015 |
|
RU2709218C2 |
| СПОСОБ КОМПЕНСАЦИИ СТАРЕНИЯ ДАТЧИКА КИСЛОРОДА (ВАРИАНТЫ) | 2015 |
|
RU2706512C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ЭКСПЛУАТАЦИИ ДАТЧИКА СОДЕРЖАНИЯ КИСЛОРОДА В ОТРАБОТАВШИХ ГАЗАХ В ЗАВИСИМОСТИ ОТ КОНТАКТА ВОДЫ С ДАТЧИКОМ | 2017 |
|
RU2704895C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА РЕГУЛИРОВАНИЯ МОЩНОСТИ НАГРЕВА КИСЛОРОДНОГО ДАТЧИКА ДЛЯ УМЕНЬШЕНИЯ ЕГО ДЕГРАДАЦИИ ПОД ДЕЙСТВИЕМ ВОДЫ | 2014 |
|
RU2681724C2 |
| ВЫЯВЛЕНИЕ ПОТЕМНЕНИЯ ЭЛЕМЕНТА ДАТЧИКА КИСЛОРОДА | 2016 |
|
RU2691209C2 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ КИСЛОРОДНЫМ ДАТЧИКОМ РЕГУЛИРУЕМОГО НАПРЯЖЕНИЯ | 2015 |
|
RU2702068C2 |
| Способ обеспечения измерения влажности | 2016 |
|
RU2689227C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ НА ОСНОВЕ ОЦЕНКИ СОДЕРЖАНИЯ СПИРТА В ТОПЛИВЕ | 2016 |
|
RU2717478C2 |
| Способ (варианты) и система для регулирования впрыска воды в двигатель | 2017 |
|
RU2684065C1 |
| СПОСОБ (ВАРИАНТЫ) РЕГУЛИРОВАНИЯ ВПРЫСКА ВОДЫ В ДВИГАТЕЛЬ | 2017 |
|
RU2702783C2 |
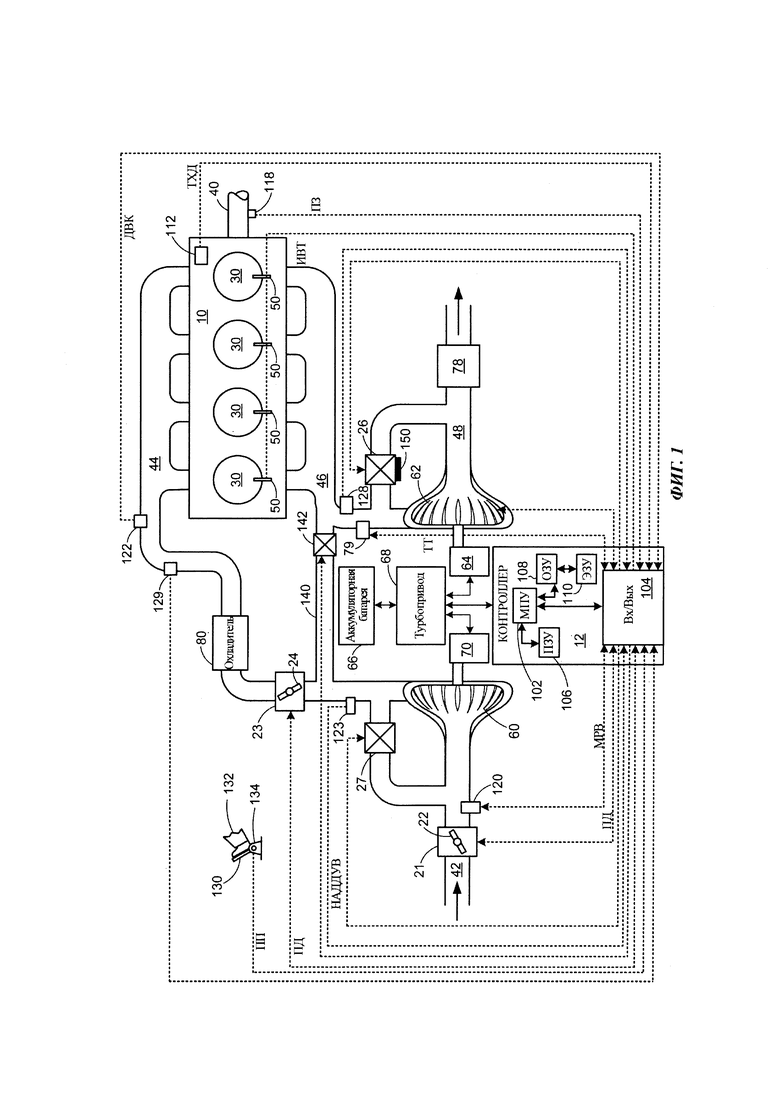
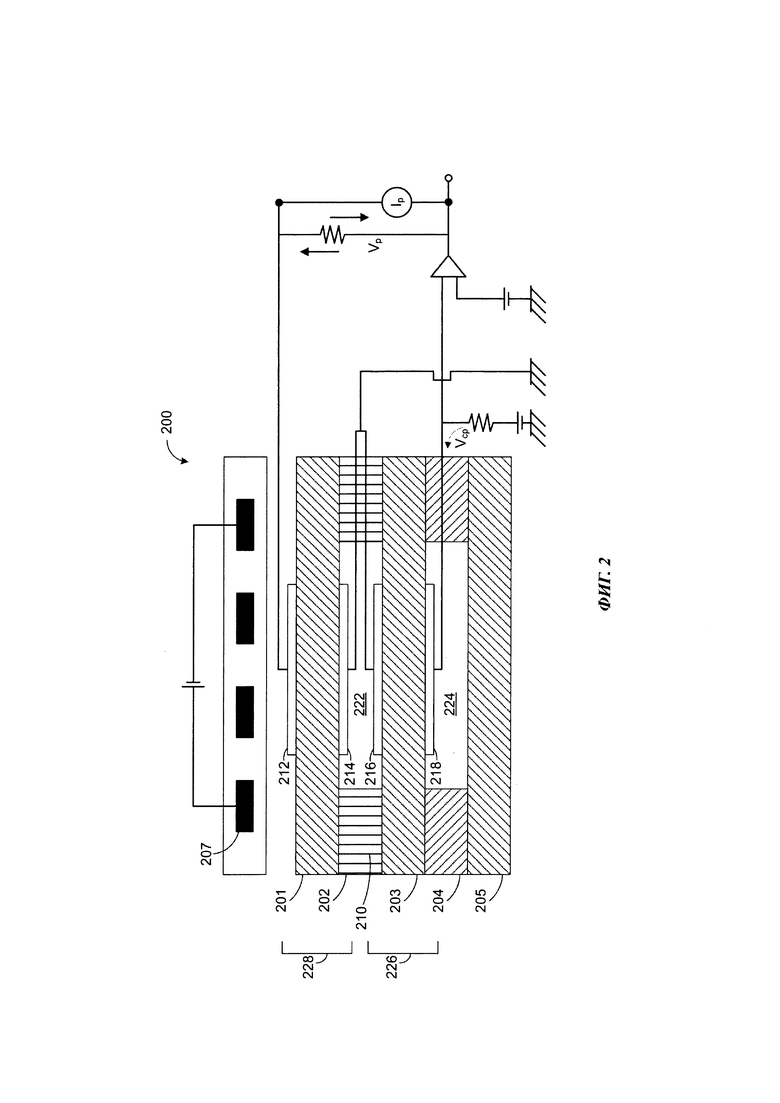
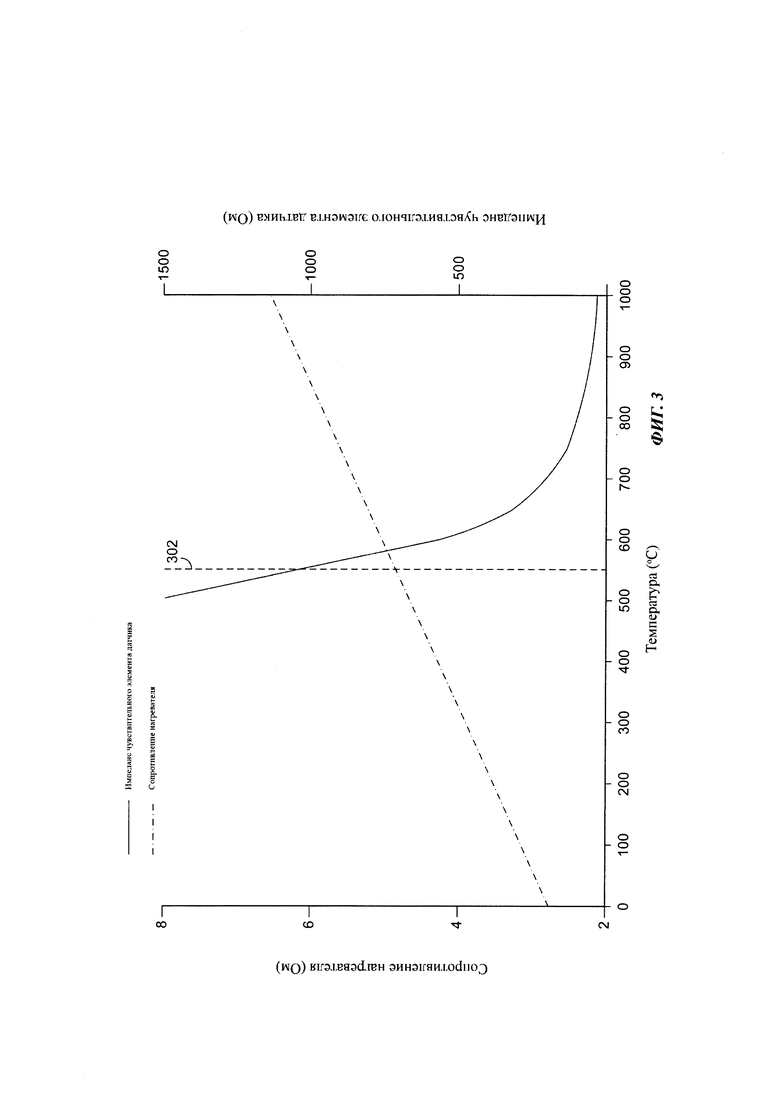
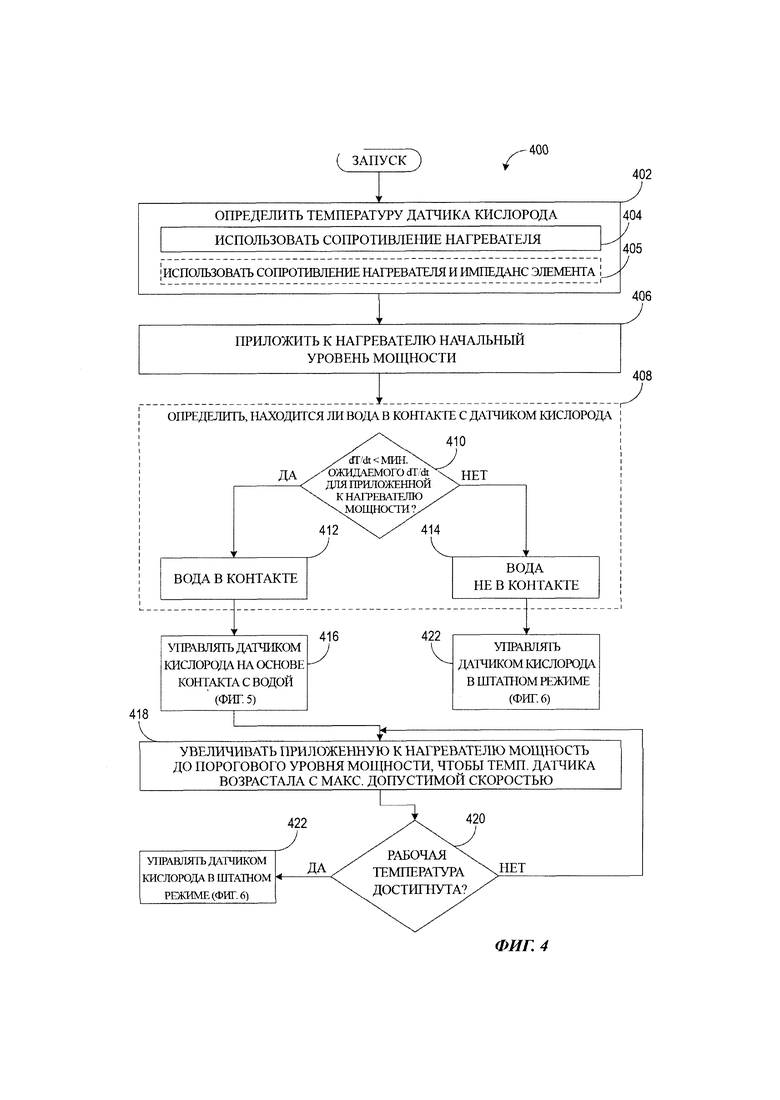
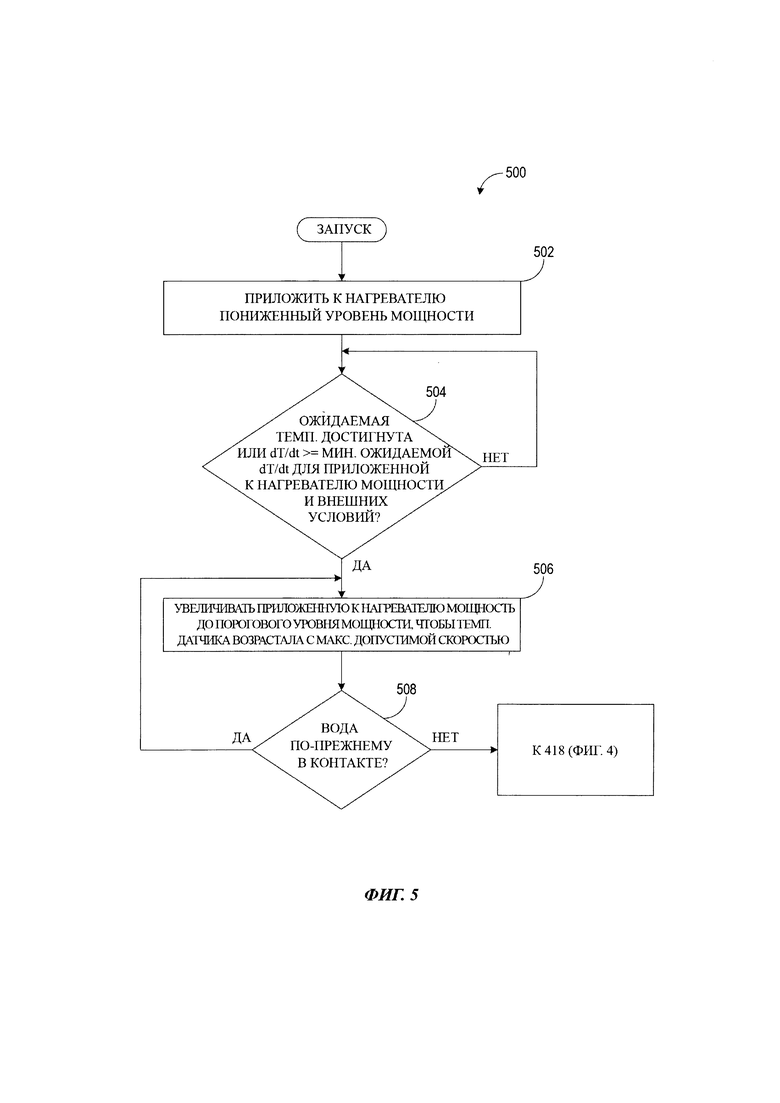
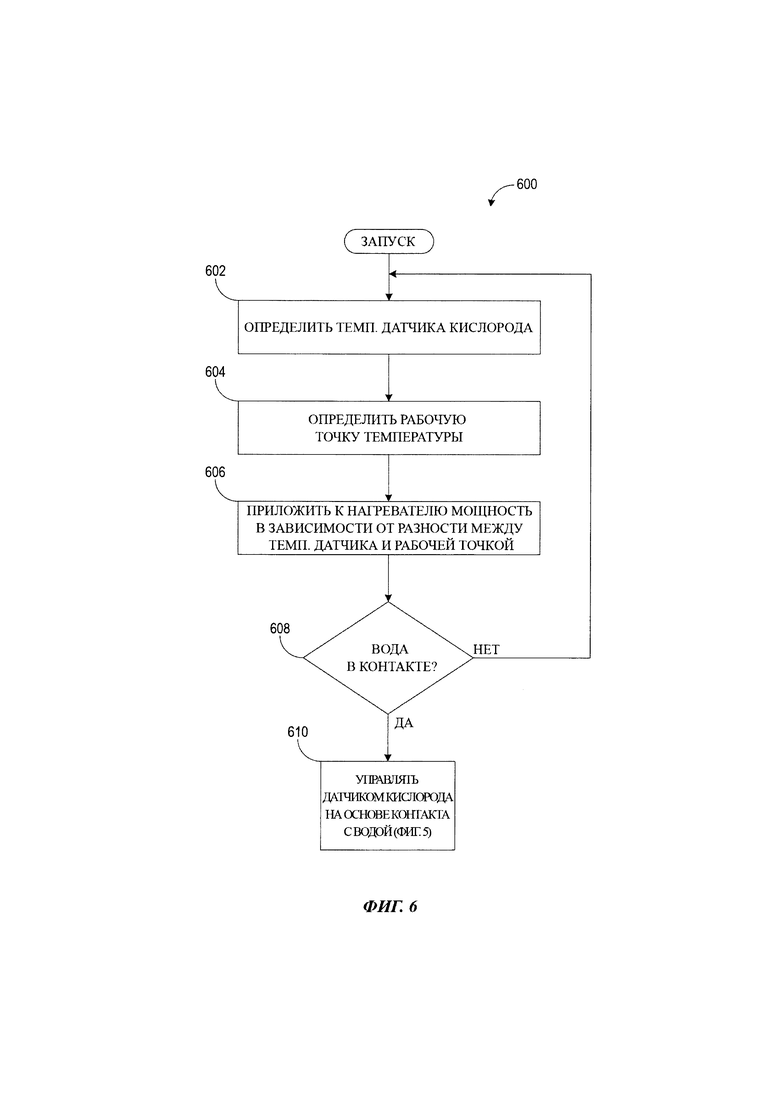
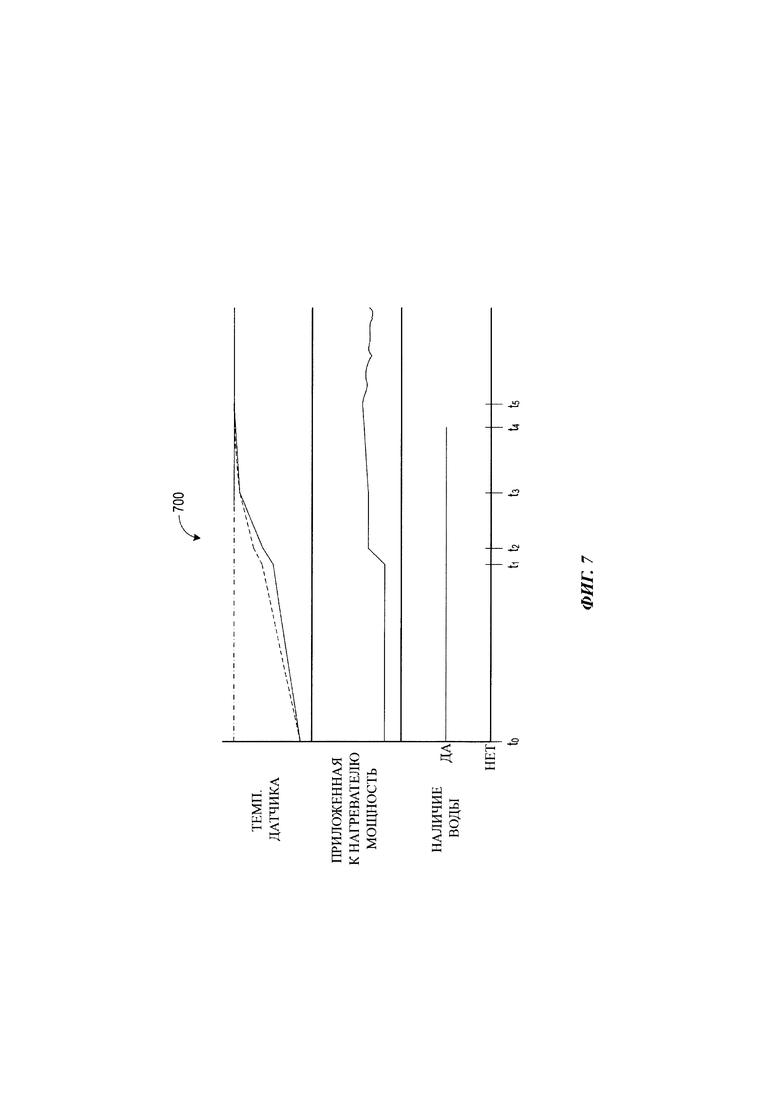
Предложены различные способы эксплуатации датчика кислорода. В одном примере способ эксплуатации датчика кислорода содержит приложение мощности к нагревателю датчика кислорода и извещение о том, контактирует ли вода с датчиком кислорода, на основе скорости изменения температуры датчика кислорода. Причем мощность представляет собой начальный, первый уровень мощности. Причем в ответ на извещение о том, что вода контактирует с датчиком кислорода, прикладывают второй уровень мощности, превышающий первый уровень мощности, к нагревателю и определяют, достигнута ли ожидаемая температура датчика кислорода или минимальная ожидаемая скорость изменения температуры датчика кислорода. При этом как ожидаемую температуру, так и минимальную ожидаемую скорость изменения ожидают для второго уровня мощности. Технический результат – повышение точности получаемых данных за счет поддержания требуемого диапазона рабочих температур датчика кислорода. 3 н. и 16 з.п. ф-лы, 7 ил.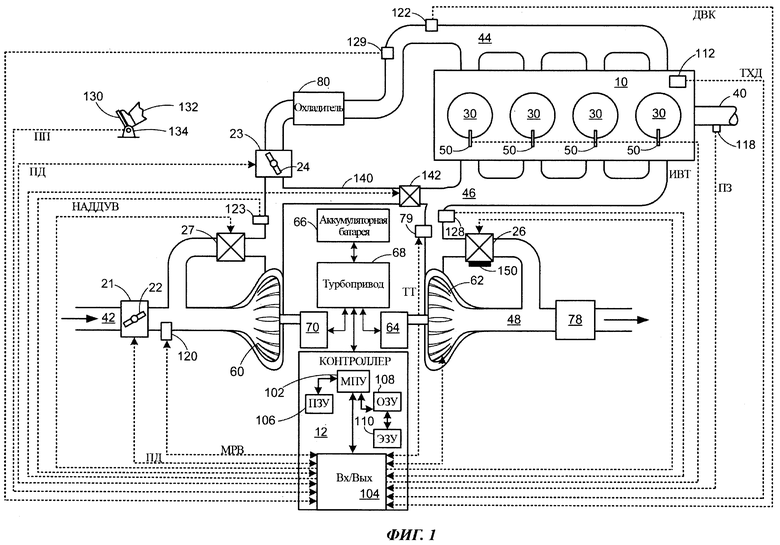
1. Способ эксплуатации датчика кислорода, содержащий следующие шаги:
прикладывают мощность к нагревателю датчика кислорода;
извещают о том, контактирует ли вода с датчиком кислорода, на основе скорости изменения температуры датчика кислорода;
причем мощность представляет собой начальный, первый уровень мощности,
и способ дополнительно содержит следующие шаги:
в ответ на извещение о том, что вода контактирует с датчиком кислорода, прикладывают второй уровень мощности, превышающий первый уровень мощности, к нагревателю и определяют, достигнута ли ожидаемая температура датчика кислорода или минимальная ожидаемая скорость изменения температуры датчика кислорода, причем как ожидаемую температуру, так и минимальную ожидаемую скорость изменения ожидают для второго уровня мощности.
2. Способ по п. 1, отличающийся тем, что извещение о том, контактирует ли вода с датчиком кислорода, содержит извещение о том, что вода контактирует с датчиком кислорода, в ответ на скорость изменения, меньшую, чем минимальная скорость изменения температуры датчика кислорода, ожидаемая для мощности, прикладываемой к нагревателю, при этом минимальную ожидаемую скорость изменения извлекают путем обращения к просмотровой таблице с использованием значения мощности, прикладываемой к нагревателю.
3. Способ по п. 1, дополнительно содержащий, перед извещением о том, контактирует ли вода с датчиком кислорода, определение температуры датчика кислорода на основе:
только сопротивления нагревателя, если сопротивление указывает на температуру, более низкую или равную пороговой температуре; и
как сопротивления нагревателя, так и импеданса датчика кислорода, если сопротивление указывает на температуру, более высокую, чем пороговая температура.
4. Способ по п. 1, отличающийся тем, что мощность находится на минимальном уровне мощности, причем минимальный уровень мощности представляет собой уровень
мощности, обусловливающий нагревание датчика кислорода без угрозы вызова температурного удара и растрескивания в датчике, которые в противном случае могли бы произойти при наличии воды, контактирующей с датчиком кислорода, при приложении мощности, превышающей начальный уровень мощности.
5. Способ по п. 1, отличающийся тем, что ожидаемую температуру и минимальную ожидаемую скорость изменения дополнительно ожидают для одного или более из потока впускного воздуха и температуры отработавших газов.
6. Способ по п. 1, дополнительно содержащий, в ответ на достижение датчиком кислорода или ожидаемой температуры, или минимальной ожидаемой скорости изменения, увеличение мощности, прикладываемой к нагревателю, сверх второго уровня мощности до порогового уровня мощности так, чтобы температура датчика кислорода возрастала с максимально допустимой скоростью.
7. Способ по п. 6, содержащий также следующие шаги:
извещают, контактирует ли еще вода с датчиком кислорода;
в ответ на извещение о том, что вода еще контактирует с датчиком кислорода, увеличивают мощность, прикладываемую к нагревателю, до извещения о том, что вода больше не контактирует с датчиком кислорода; и
в ответ на извещение о том, что вода не контактирует с датчиком кислорода, увеличивают мощность, прикладываемую к нагревателю, до тех пор, пока температура датчика кислорода не достигнет рабочей температуры.
8. Способ по п. 7, дополнительно содержащий, в ответ на достижение температурой датчика кислорода рабочей температуры, управление нагревателем при помощи управления с замкнутым контуром.
9. Способ по п. 8, отличающийся тем, что управление с замкнутым контуром содержит следующие шаги:
определяют температуру датчика кислорода;
определяют рабочую точку температуры; и
прикладывают мощность к нагревателю в зависимости от разности между температурой датчика кислорода и рабочей точкой температуры.
10. Способ эксплуатации датчика кислорода, содержащий следующие шаги:
прикладывают начальный уровень мощности к нагревателю датчика кислорода;
извещают о том, контактирует ли вода с датчиком кислорода, на основе скорости изменения температуры датчика кислорода;
в ответ на извещение о том, что вода контактирует с датчиком кислорода, управляют нагревателем по первой схеме управления; и
в ответ на извещение о том, что вода не контактирует с датчиком кислорода, управляют нагревателем по второй схеме управления, отличной от первой схемы управления.
11. Способ по п. 10, отличающийся тем, что первая схема управления содержит следующие шаги:
прикладывают второй уровень мощности к нагревателю, причем второй уровень мощности больше, чем начальный уровень мощности; и
извещают, достигнута ли датчиком кислорода или ожидаемая температура, или минимальная ожидаемая скорость изменения температуры датчика кислорода, причем как ожидаемую температуру, так и минимальную ожидаемую скорость изменения ожидают для второго уровня мощности.
12. Способ по п. 11, дополнительно содержащий, в ответ на извещение о том, что или ожидаемая температура, или минимальная ожидаемая скорость изменения достигнута датчиком кислорода, увеличение мощности, прикладываемой к нагревателю, сверх второго уровня мощности до порогового уровня мощности так, чтобы температура датчика кислорода возрастала с максимально допустимой скоростью.
13. Способ по п. 12, содержащий также следующие шаги:
извещают, контактирует ли еще вода с датчиком кислорода;
в ответ на извещение о том, что вода еще контактирует с датчиком кислорода, увеличивают мощность, прикладываемую к нагревателю, до извещения о том, что вода больше не контактирует с датчиком кислорода; и
в ответ на извещение о том, что вода не контактирует с датчиком кислорода, увеличивают мощность, прикладываемую к нагревателю, до тех пор, пока температура датчика кислорода не достигнет рабочей температуры.
14. Способ по п. 13, дополнительно содержащий, в ответ на достижение температурой датчика кислорода рабочей температуры, управление нагревателем при помощи управления с замкнутым контуром.
15. Способ по п. 14, отличающийся тем, что управление с замкнутым контуром и вторая схема управления содержат следующие шаги:
определяют температуру датчика кислорода;
определяют рабочую точку температуры; и
прикладывают мощность к нагревателю в зависимости от разности между температурой датчика кислорода и рабочей точкой температуры.
16. Способ эксплуатации датчика кислорода, содержащий следующие шаги:
прикладывают начальный уровень мощности к нагревателю датчика;
в ответ на наличие контакта воды с датчиком кислорода, определенного по скорости изменения температуры датчика, управляют нагревателем по первой схеме управления; и
в противном случае управляют нагревателем по второй схеме управления, отличной от первой схемы управления.
17. Способ по п. 16, отличающийся тем, что первая схема управления содержит увеличение мощности, прикладываемой к нагревателю датчика, сверх начального уровня мощности в соответствии или с ожидаемой температурой, или с минимальной ожидаемой скоростью изменения температуры датчика кислорода, и
при этом вторая, иная схема управления содержит приложение мощности к нагревателю датчика в зависимости от разности между температурой датчика и рабочей точкой температуры.
18. Способ по п. 17, отличающийся тем, что первая схема управления дополнительно содержит, в ответ на достижение датчиком кислорода или ожидаемой температуры, или минимальной ожидаемой скорости изменения, увеличение мощности, прикладываемой к нагревателю, до порогового уровня мощности так, чтобы температура датчика возрастала с максимально допустимой скоростью, и
при этом вторая, иная схема управления дополнительно содержит извещение о том, контактирует ли вода с датчиком кислорода.
19. Способ по п. 18, отличающийся тем, что первая схема управления дополнительно содержит, в ответ на отсутствие контакта воды с датчиком кислорода, увеличение мощности, прикладываемой к нагревателю, до тех пор, пока температура датчика не достигнет рабочей температуры.
| US 20120273369 A1, 01.11.2012 | |||
| US 8407986 B2, 02.04.2013 | |||
| US 20070007134 A1, 11.01.2007 | |||
| US 7249489 B2, 31.07.2007; | |||
| WO 2003089919 A1, 30.10.2003 | |||
| US 7017567 A1, 28.03.2006 | |||
| JP 2004061184 A, 26.02.2004. |

