Область изобретения
В основном настоящее изобретение относится к способам и системам для регулирования работы кислородного датчика регулируемого напряжения двигателя внутреннего сгорания для уменьшения деградации датчика.
Краткое описание изобретения
Для обеспечения индикации различных компонентов отработавших газов могут функционировать датчики впускных и/или отработавших газов. Например, в US 20120037134 раскрыто использование кислородного датчика впускного газа для определения, обеднения впускной смеси. В альтернативных подходах, обеднение впускной смеси может быть определено кислородным датчиком отработавших газов. Определение обеднения впускной смеси может быть использовано для регулирования различных рабочих параметров двигателя, таких как подача топлива и воздушно-топливное отношение. В качестве другого примера, в U.S. 5,145,566 раскрыто использование кислородного датчика отработавших газов для определения содержания воды в отработавших газах. Содержание воды, определенное с использованием кислородного датчика впускных или отработавших газов, может быть использовано для определения влажности окружающей среды во время работы двигателя и/или для определения содержания спирта в сжигаемом в двигателе топливе.
В некоторых примерах кислородный датчик может быть кислородным датчиком регулируемого напряжения (PH). Опорное напряжение кислородного датчика PH может быть регулируемым между более низким базовым напряжением, при котором не происходит диссоциация воды, и более высоким целевым напряжением, при котором диссоциация воды происходит. Выходные сигналы кислородного датчика при двух опорных напряжениях далее могут быть использованы для определения содержания воды во впускном газе или в отработавших газах двигателя.
Однако авторы настоящего изобретения осознают потенциальные проблемы, связанные с многократным изменением опорного напряжения кислородного датчика PH от базового напряжения до целевого напряжения и обратно. В качестве примера, повторяемые переходы между опорными напряжениями могут привести к выгоранию датчика и/или к колебаниям тока накачки. Например, переходы между более низким и более высоким опорными напряжениями за один шаг могут привести к большим положительным выбросам напряжения накачки ячейки и тока накачки датчика PH. При повторении более тысячи раз это может привести к деградации датчика. Большие времена установления, вызванные колебаниями, могут ухудшить возможность возвращения кислородного датчика к его базовому опорному напряжению, что увеличит время работы по подаче топлива без обратной связи.
В одном из примеров описанные выше проблемы могут быть решены с применением способа постепенного увеличения опорного напряжения кислородного датчика от первого напряжения до второго напряжения со скоростью изменения, основанной на условиях работы двигателя. В таком случае изменение опорного напряжения кислородного датчика может быть более постепенным, что уменьшает нагрузку на датчик и увеличивает ресурс датчика.
В одном из примеров, вместо от перехода в один шаг, увеличение опорного напряжения кислородного датчика от первого напряжения до второго напряжения может содержать переход от первого напряжения ко второму в несколько шагов с указанной скоростью изменения. Скорость изменения может быть обусловлена условиями работы двигателя, такими как влажность окружающей среды и подача топлива в двигатель. Например, в условиях низкой влажности и/или при прохождении через датчик преимущественно воздуха окружающей среды (например, во время отсечки топлива в режиме замедления) может происходить увеличение положительных выбросов, отрицательных выбросов и времени установления. Таким образом, выгорание датчика и колебания из-за положительных выбросов, отрицательных выбросов и времени установления могут быть уменьшены в условиях низкой влажности и/или в условиях уменьшенной подачи топлива в двигатель посредством уменьшения скорости изменения, за счет чего уменьшается деградация кислородного датчика.
Следует понимать, что представленное выше краткое описание приведено в упрощенной форме концепций, которые будут раскрыты более подробно в описании изобретения. Оно не предназначено для обозначения ключевых или существенных признаков изобретения, которое однозначно определено в формуле изобретения, представленной после описания изобретения. Более того, объем изобретения не ограничивается исполнениями, направленными на устранение любых недостатков, отмеченных выше или в любой части данного раскрытия.
Краткое описание чертежей
На фиг. 1 представлена принципиальная схема двигателя, содержащего кислородный датчик отработавших газов и кислородный датчик впускного газа.
На фиг. 2 представлен пример принципиальной схемы кислородного датчика.
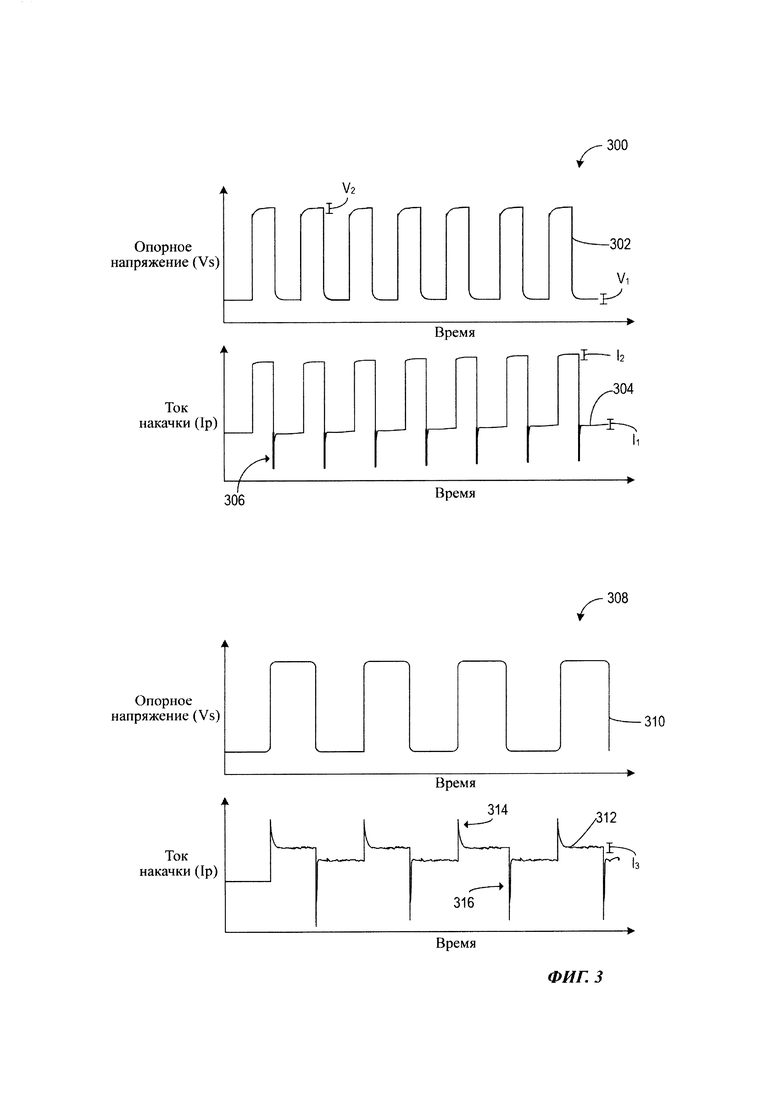
На фиг. 3 представлены два графика примера изменений опорного напряжения (Vs) кислородного датчика с переходом в один шаг и полученного тока накачки (Ip) при разных условиях подачи топлива в двигатель.
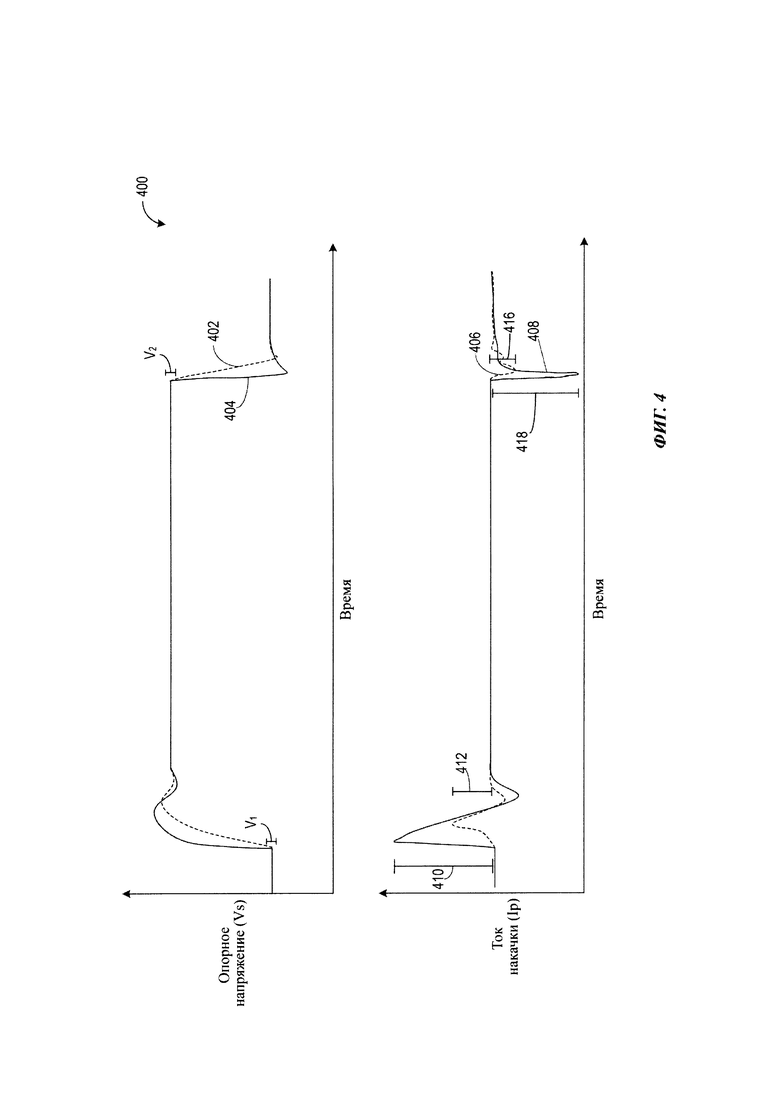
На фиг. 4 представлен график примера изменения тока накачки кислородного датчика в ответ на изменения опорного напряжения кислородного датчика с разными скоростями изменения.
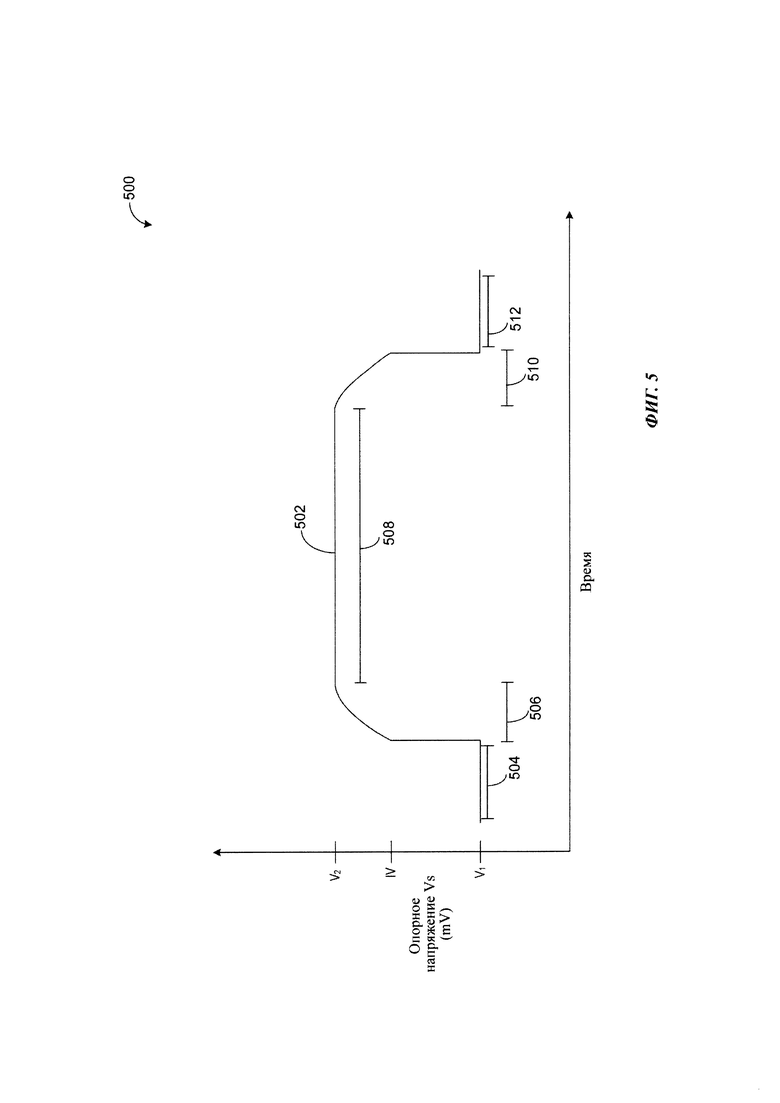
На фиг. 5 представлен пример формы сигнала изменения опорного напряжения кислородного датчика, в том числе переход в один шаг и переход с меньшей скоростью изменения.
На фиг. 6 представлена блок-схема, иллюстрирующая способ управления кислородным датчиком
На фиг. 7 представлен график, иллюстрирующий регулирование скорости изменения опорного напряжения кислородного датчика на основе рабочих параметров двигателя.
Описание изобретения
Настоящее подробное описание относится к системам и способам регулирования скорости изменения опорного напряжения кислородного датчика. Как показано на фиг. 1, двигатель транспортного средства может содержать кислородный датчик, расположенный во впускном и/или в выпускном канале двигателя. Как показано на фиг. 2, кислородный датчик может быть выполнен в виде кислородного датчика регулируемого напряжения (PH) с возможностью регулирования опорного напряжения кислородного датчика PН между более низким базовым опорным напряжением и более высоким опорным напряжением. В одном из примеров, показанном на фиг. 3, переход в один шаг между более низким и более высоким опорными напряжениями может привести к положительным выбросам и/или отрицательным выбросам напряжения накачки ячейки и тока накачки кислородного датчика PН. При повторении в течение множества последовательных циклов это может привести к деградации кислородного датчика. В одном из примеров деградация кислородного датчика может быть уменьшена посредством постепенного увеличения опорного напряжения кислородного датчика (например, линейно) от более низкого, первого опорного напряжения до более высокого, второго опорного напряжения с определенной скоростью или приращением по шагам. Таким образом, как показано на фиг. 4, положительные выбросы и отрицательные выбросы напряжения накачки ячейки и тока накачки могут быть уменьшены. На фиг. 5 показаны примеры способов постепенного изменения опорного напряжения кислородного датчика для уменьшения его деградации. Например, способ может содержать увеличение опорного напряжения кислородного датчика от более низкого, первого напряжения к промежуточному напряжению с изменением в один шаг, а затем увеличение от промежуточного напряжения к более высокому, второму напряжению с уменьшенной скоростью, при этом промежуточное напряжение находится между первым и вторым напряжениями. Как показано на фиг. 7, также может осуществляться регулирование скорости изменения опорного напряжения на основе рабочих параметров двигателя, таких как подача топлива в двигатель и/или влажность окружающей среды. Таким образом, может быть уменьшена нагрузка на кислородный датчик, и может быть увеличен ресурс кислородного датчика, за счет чего повышается качество управления двигателем по выходному сигналу от кислородного датчика.
На фиг. 1 изображена принципиальная схема, показывающая один цилиндр многоцилиндрового двигателя 10, который может быть частью силовой установки транспортного средства. Управление двигателем 10, по меньшей мере частично, может осуществляться системой управления, содержащей контроллер 12, и по входному сигналу от оператора 132 транспортного средства через устройство 130 ввода. В этом примере, устройство 130 ввода содержит педаль акселератора и датчик 134 положения педали, вырабатывающий пропорциональный сигнал положения педали (ПП). Камера 30 сгорания (т.е., цилиндр) двигателя 10 может содержать стенки 32 камеры сгорания и расположенный в ней поршень 36. Поршень 36 может быть соединен с коленчатым валом 40 с возможностью преобразования возвратно-поступательного движения поршня во вращательное движение коленчатого вала. Коленчатый вал 40 может быть соединен по меньшей мере с одним ведущим колесом транспортного средства через промежуточную систему трансмиссии. Кроме того, с коленчатым валом 40 через маховик может быть соединен стартер для обеспечения возможности запуска двигателя 10.
Камера 30 сгорания может получать впускной воздух из впускного коллектора 44 через впускной канал 42 и может выпускать отработавшие газы через выпускной канал 48. Впускной коллектор 44 и выпускной канал 48 могут выборочно сообщаться с камерой 30 сгорания через соответствующие впускной клапан 52 и выпускной клапан 54. В некоторых вариантах осуществления камера 30 сгорания может содержать два или более впускных клапана и/или два или более выпускных клапана.
В данном примере впускной клапан 52 и выпускной клапан 54 могут управляться кулачковыми приводами через соответствующие системы 51 и 53 кулачкового привода. Для регулирования работы клапанов каждая из систем 51 и 53 кулачкового привода может содержать один или несколько кулачков и может использовать одну или несколько систем переключения профиля кулачка (ППК), изменения фаз кулачкового распределения (ИФКР), изменения фаз газораспределения (ИФГ) и/или изменения высоты подъема клапанов (ИВПК), которыми может управлять контроллер 12. Положение впускного клапана 52 и выпускного клапана 54 может быть определено с помощью датчиков 55 и 57 положения, соответственно. В альтернативных вариантах осуществления управление впускным клапаном 52 и/или выпускным клапаном 54 может осуществляться электроприводом. Например, в качестве альтернативы, цилиндр 30 может содержать впускной клапан, управляемый посредством электропривода, и выпускной клапан, управляемый посредством кулачкового привода, содержащего системы ППК и/или ИФКР.
В некоторых вариантах осуществления каждый цилиндр двигателя 10 может быть выполнен с одним или несколькими топливными инжекторами для подачи к нему топлива. В качестве неограничивающего примера, цилиндр 30 показан содержащим один топливный инжектор 66. Топливный инжектор 66 показан присоединенным непосредственно к цилиндру 30 для непосредственного впрыска в него топлива пропорционально ширине импульса впрыска топлива (ИВТ), полученного от контроллера 12 через электронный драйвер 68. Таким образом, топливный инжектор 66 обеспечивает известный в уровне техники непосредственный впрыск (НВ) топлива в цилиндр 30 сгорания.
Следует понимать, что в альтернативном варианте осуществления инжектор 66 может быть выполнен в виде инжектора впрыска топлива во впускной канал, расположенный выше по потоку от цилиндра 30. Следует также иметь в виду, что подача топлива в цилиндр 30 может осуществляться от нескольких инжекторов, таких как несколько инжекторов впрыска топлива во впускной канал, несколько инжекторов непосредственного впрыска, или их сочетание.
Топливный бак в топливной системе 172 может содержать топливо различного качества, например, различные топливные смеси. К таким различиям могут относиться различное содержание спирта, различные октановые числа, различная теплота парообразования, различные топливные смеси и/или их сочетания, и т.д. В двигателе может использоваться спиртосодержащая топливная смесь, такая как Е85 (которая является смесью приблизительно 85% этанола и 15% бензина) или М85 (приблизительно 85% метанола и 15% бензина). В качестве альтернативы, двигатель может работать с другими соотношениями бензина и этанола, содержащихся в топливном баке, в том числе 100% бензина и 100% этанола, и различными вариациями коэффициентов соотношения между ними, в зависимости от содержания спирта в топливе, подаваемом оператором в топливный бак. Более того, характеристики топлива в топливном баке могут часто меняться. Например, водитель может пополнить топливный бак топливом Е85 в один день, топливом Е10 в другой, и затем топливом Е50. Таким образом, состав топлива в топливном баке может динамически изменяться в зависимости от уровня и состава топлива, оставшегося в топливном баке на момент заправки.
Таким образом, каждодневные изменения в наполнении топливного бака могут привести к частым изменениям топливной смеси в топливной системе 172, что оказывает влияние на состав и/или качества топлива, подаваемого через инжектор 66. Различные топливные смеси, подаваемые через инжектор 66, могут быть названы в данном документе видом топлива. В одном из примеров, различные топливные смеси могут быть качественно описаны октановым числом по исследовательскому методу (ОЧИМ), процентом содержания спирта, процентом содержания этанола и т.д.
Следует иметь в виду, что в одном из вариантов осуществления двигатель может работать от поступления различной топливной смеси через непосредственный впрыск, и, в альтернативных вариантах, двигатель может работать с использованием двух инжекторов и регулирования относительного количества впрыска от каждого инжектора. Также следует понимать, что при работе двигателя с наддувом от устройства наддува, такого как турбокомпрессор или нагнетатель (не показаны), предел наддува может быть увеличен за счет повышения содержания спирта в различных топливных смесях.
Также, как видно на фиг. 1, впускной канал 42 может содержать дроссель 62, имеющий дроссельную заслонку 64. В этом конкретном примере регулирование положения дроссельной заслонки 64 может осуществлять контроллер 12 посредством сигнала, выдаваемого на электродвигатель или привод, входящие в состав дросселя 62, в конфигурации, которую обычно называют электронным управлением дросселем (ЭУД). Таким образом, дроссель 62 может осуществлять регулирование впускного воздуха, поступающего в камеру 30 сгорания, а также другие цилиндры двигателя. Положение дроссельной заслонки 64 может быть подано на контроллер 12 посредством сигнала положения дросселя (ПД). Впускной канал 42 может содержать датчик 120 массового расхода воздуха (МРВ) и датчик 122 давления воздуха в коллекторе (ДВК) для подачи соответствующих сигналов МРВ и ДВК в контроллер 12.
Система 88 зажигания, в выбранных режимах работы, может обеспечивать искру зажигания в камере 30 сгорания посредством свечи 92 зажигания по сигналу опережения зажигания (03) от контроллера 12. Несмотря на то, что показаны компоненты искрового зажигания, камера 30 сгорания или одна или несколько других камер сгорания двигателя 10 в некоторых вариантах осуществления могут работать в режиме зажигания от сжатия, с искрой зажигания или без нее.
Кислородный датчик 126 регулируемого напряжения (РН) показан присоединенным к выпускному каналу 48 выше по потоку от устройства 70 ограничения токсичности отработавших газов. Устройство 70 ограничения токсичности отработавших газов показано расположенным по ходу выпускного канала 48 ниже по потоку от кислородного датчика 126 РН. Устройство 70 может быть трехкомпонентным каталитическим нейтрализатором, ловушкой оксидов азота (NOx), различными другими устройствами ограничения токсичности или их сочетаниями. В некоторых вариантах осуществления во время работы двигателя 10 периодически может происходить сброс устройства 70 ограничения токсичности отработавших газов посредством работы, по меньшей мере, одного цилиндра двигателя в условиях конкретного воздушно-топливного отношения.
Как показано в примере фиг.1, система также содержит датчик 127 впускного воздуха, соединенный с впускным каналом 44. Датчик 127 может быть выполнен в виде кислородного датчика РН, а также в виде любого подходящего датчика для обеспечения индикации воздушно-топливного отношения в отработавших газах, например, в виде линейного кислородного датчика или универсального или широкополосного кислородного датчика отработавших газов (УКДОГ), двухпозиционного кислородного датчика или кислородного датчика отработавших газов (КДОГ), нагреваемого (НКДОГ), датчика оксидов азота (NOx), углеводорода (НС) или углекислого газа (СО).
Кроме того, в описанных вариантах осуществления система рециркуляции отработавших газов (РОГ) может направлять необходимую часть отработавших газов от выпускного канала 48 к впускному каналу 44 через канал 140 РОГ. Контроллер 12 может осуществлять регулирование содержания рециркулируемых отработавших газов (РОГ), поступающих во впускной канал 44, посредством клапана 142 РОГ. Кроме того, датчик 144 РОГ может быть расположен внутри канала 140 РОГ и может обеспечивать индикацию одного или нескольких параметров давления, температуры и концентрации отработавших газов. В некоторых условиях система РОГ может быть использована для регулирования температуры воздуха и топливной смеси в камере сгорания, за счет чего при некоторых режимах сгорания реализуется способ регулирования момента зажигания. Кроме того, в некоторых условиях часть газообразных продуктов сгорания может удерживаться или захватываться в камере сгорания путем регулирования фаз газораспределения выпускного клапана, например, управлением механизмом изменения фаз газораспределения.
Контроллер 12 показан на фиг. 1 в виде микрокомпьютера, содержащего микропроцессорное устройство 102 (МПУ), порты 104 ввода/вывода (ВВ./ВЫВ.), электронный носитель для хранения исполняемых программ и калибровочных значений, показанный в данном примере в виде постоянного запоминающего устройства 106 (ПЗУ), оперативное запоминающее устройство 108 (ОЗУ), энергонезависимое запоминающее устройство 110 (ЭЗУ), и шину данных. Контроллер 12, в дополнение к описанным ранее сигналам, может принимать различные сигналы от датчиков, соединенных с двигателем 10, в том числе измерения поданного массового расхода воздуха (МРВ) от датчика 120 массового расхода воздуха; температуру хладагента двигателя (ТХД) от датчика 112 температуры, соединенного с охлаждающей рубашкой 114; сигнал профиля зажигания (ПЗ) от датчика 118 Холла (или другого типа), соединенного с коленчатым валом 40; положение дросселя (ПД) от датчика положения дросселя; и сигнал абсолютного давления воздуха в коллекторе (ДВК) от датчика 122. Сигнал частоты вращения двигателя (ЧВД) может быть сгенерирован контроллером 12 из сигнала ПЗ.
На постоянном запоминающем устройстве 106 носителя данных могут быть записаны машиночитаемые данные, представленные в виде команд, исполняемых процессором 102 для осуществления способов, описанных ниже, а также других вариантов, которые предполагаются, но явно не указаны.
Как описано выше, на фиг. 1 показан только один цилиндр многоцилиндрового двигателя, и каждый цилиндр может также содержать свой собственный набор впускных/выпускных клапанов, топливный инжектор, свечу зажигания и т.д.
Далее, на фиг. 2 схематически представлен один из примеров исполнения кислородного датчика 200, выполненного с возможностью измерения концентрации кислорода (O2) во впускном воздушном потоке во впускном канале или в потоке отработавших газов в выпускном канале. Например, датчик 200 может работать как кислородный датчик 126 или 127 РН на фиг. 1. Датчик 200 содержит множество слоев одного или нескольких керамических материалов, расположенных друг над другом. В примере исполнения на фиг. 2 изображены пять керамических слоев, а именно слои 201, 202, 203, 204, и 205. Эти слои содержат один или несколько слоев твердого электролита, способного пропускать ионный кислород. К подходящим твердым электролитам относятся, в том числе, материалы на основе оксида циркония. Кроме того, в некоторых вариантах осуществления в тепловом контакте с упомянутыми слоями может быть предусмотрен нагреватель 207 для увеличения ионной проводимости слоев. Несмотря на то, что изображенный кислородный датчик выполнен из пяти керамических слоев, следует понимать, что кислородный датчик может содержать другое подходящее количество керамических слоев.
Слой 202 содержит материал или материалы, создающие диффузионный путь 210. Диффузионный путь 210 выполнен для введения отработавших газов в первую внутреннюю полость 222 посредством диффузии. Диффузионный путь 210 может быть выполнен для диффузии одного или нескольких компонентов впускного газа или отработавших газов, в том числе, но не ограничиваясь этим, требуемого анализируемого вещества (например, O2), во внутреннюю полость 222 на более ограниченной скорости, чем скорость, с которой может происходить накачивание анализируемого вещества парой электродов 212 и 214. Таким образом, в первой внутренней полости 222 может быть получен стехиометрический уровень O2.
Датчик 200 дополнительно содержит внутри слоя 204 вторую внутреннюю полость 224, отделенную от первой внутренней полости 222 слоем 203. Вторая внутренняя полость 224 выполнена с возможностью поддержания постоянного парциального давления кислорода, эквивалентного стехиометрическим условиям, например, уровня кислорода во второй внутренней полости 224, равного уровню, который содержал бы впускной воздух или отработавшие газы при стехиометрическом воздушно-топливном отношении. Концентрация кислорода во второй внутренней полости 224 поддерживается постоянной напряжением накачки Vcp.. В данном случае вторую внутреннюю полость 224 можно считать контрольной ячейкой.
В коммуникации с первой внутренней полостью 222 и контрольной ячейкой 224 расположена пара чувствительных электродов 216 и 218. Пара чувствительных электродов 216 и 218 обнаруживает градиент концентрации, появление которого между первой внутренней полостью 222 и контрольной ячейкой 224 возможно при концентрации кислорода во впускном воздухе или в отработавших газах выше или ниже стехиометрического уровня. Высокая концентрация кислорода может быть обусловлена обедненной впускной смесью или смесью отработавших газов, тогда как низкая концентрация кислорода может быть обусловлена обогащенной смесью.
Пара электродов 212 и 214 накачки находится в коммуникации с внутренней полостью 222, и выполнена с возможностью электрохимической накачки выбранной составляющей газа (например, O2) из внутренней полости 222 через слой 201 наружу из датчика 200. В качестве альтернативы, пара электродов 212 и 214 накачки может быть выполнена с возможностью электрохимической накачки выбранного газа через слой 201 во внутреннюю полость 222. В данном случае пару электродов 212 и 214 накачки можно считать ячейкой накачки O2.
Электроды 212, 214, 216, и 218 могут быть изготовлены из различных подходящих материалов. В некоторых вариантах осуществления электроды 212, 214, 216, и 218 могут быть, по меньшей мере, частично изготовлены из материала, являющегося катализатором диссоциации молекулярного кислорода. К примерам таких материалов относятся, в том числе, электроды, содержащие платину и/или серебро.
Процесс электрохимической накачки кислорода во внутреннюю полость 222 или из нее предусматривает приложение напряжения Vp к паре электродов 212 и 214 накачки. Напряжение накачки Vp подают к ячейке накачки O2 для накачки кислорода в первую внутреннюю полость 222 или из нее с целью обеспечения стехиометрического уровня кислорода в полости ячейки накачки. Полученный ток накачки Ip пропорционален концентрации кислорода в отработавших газах. Система управления (не показана на фиг. 2) вырабатывает сигнал тока накачки Iр как функцию от интенсивности поданного напряжения накачки Vp, необходимой для поддержания стехиометрического уровня внутри первой внутренней полости 222. Таким образом, при обедненной смеси будет происходить накачка кислорода наружу из внутренней полости 222, а при обогащенной смеси будет происходить накачка кислорода во внутреннюю полость 222.
Следует иметь в виду, что описанный здесь кислородный датчик является лишь одним из вариантов осуществления кислородного датчика, и что другие варианты осуществления кислородных датчиков могут иметь дополнительные и/или альтернативные функции и/или конструкции.
В одном из примеров кислородный датчик 200 (и кислородные датчики 126 и 127, показанные на фиг. 1) может быть выполнен в виде кислородного датчика регулируемого напряжения (РН), в котором опорное напряжение датчика может принимать значения между более низким или базовым напряжением, при котором происходит обнаружение кислорода (и не происходит диссоциация воды), и более высоким напряжением, при котором может происходить диссоциация молекул воды в потоке газа. Например, во время базовой работы кислородный датчик может работать с базовым опорным напряжением. При базовом опорном напряжении, когда вода попадает на датчик, нагревательный элемент датчика может испарять воду и измерять ее содержание в виде локального пара или разжижающего вещества. Кислородный датчик может также работать во втором режиме, при котором опорное напряжение увеличивается до второго опорного напряжения. Второе опорное напряжение может быть выше базового опорного напряжения. Когда кислородный датчик впускного газа работает при втором опорном напряжении, нагревательный элемент датчика диссоциирует воду в воздухе, а затем измеряет концентрацию воды. Таким образом, полученный ток накачки датчика при втором опорном напряжении может указывать на содержание кислорода в потоке газа и содержание кислорода в диссоциированных молекулах воды. Изменение тока накачки между первым напряжением и вторым напряжением может также указывать на содержание воды в потоке газа, в котором находится кислородный датчик.
Таким образом, кислородный датчик РН на фиг. 2 может быть использован для оценки содержания кислорода в свежем воздухе, поступающем во впускной коллектор (если датчик расположен во впускном канале двигателя), или содержания кислорода в отработавших газах, выпускаемых двигателем (если датчик расположен в выпускном канале ниже по потоку от цилиндра двигателя). Кислородный датчик РН также может быть использован для оценки содержания спирта в сжигаемом в двигателе топливе и влажности окружающей среды.
Как видно на фиг. 3, на двух графиках 300 и 308 показано изменение во времени опорного напряжения и полученного тока накачки кислородного датчика регулируемого напряжения (например, кислородных датчиков 126 или 127 РН, показанных на фиг. 1). График 300 содержит две кривые 302 и 304, которые показывают, соответственно, изменение опорного напряжения и тока накачки кислородного датчика (например кислородного датчика РН) во времени в типовых условиях выпуска. Как опорное напряжение, так и ток накачки кислородного датчика, периодически изменяются между более низким первым значением и более высоким вторым значением. Первое опорное напряжение, V1, может иметь значение, достаточное для накачки кислорода из ячейки, но достаточно низкое, чтобы в датчике не происходила диссоциация кислородосодержащих соединений, таких как вода (например, в одном из примеров V1 может составлять приблизительно 450 мВ). При подаче первого опорного напряжения V1 может быть сгенерирован выходной сигнал датчика в виде первого тока накачки, I1, который указывает на содержание кислорода в пробе газа. После определения содержания кислорода к ячейке накачки кислорода кислородного датчика может быть подано второе напряжение накачки, V2. Второе напряжение V2 может быть выше первого напряжения V1t поданного к датчику. В частности, второе напряжение V2 может иметь значение, достаточно высокое для диссоциации требуемого соединения кислорода. Например, второе напряжение V2 может быть достаточно высоким для диссоциации молекулы воды на водород и кислород (например, в одном из примеров, V2 может составлять приблизительно 1,1 В). Подача второго напряжения V2 может обеспечивать генерацию второго тока накачки, I2, указывающего на содержание в пробе газа кислорода и воды. Следует понимать, что используемый здесь термин "вода" во фразе "содержание кислорода и воды" относится к содержанию кислорода, полученного из диссоциированных молекул воды в пробе газа.
Влажность окружающей среды (например, абсолютная влажность свежего воздуха, окружающего транспортное средство) может быть определена на основе первого тока накачки и второго тока накачки при условии отсутствия подачи топлива (например, в случае ОТРЗ). В этом случае для получения значения, указывающего на содержание кислорода в диссоциированных молекулах воды (например, содержание воды) в пробе газа, первый ток накачки может быть вычтен из второго тока накачки. Это значение может быть пропорционально влажности окружающей среды. Кроме того, содержание спирта в топливе, и, таким образом, вид топлива, могут быть идентифицированы во время нормальных условий подачи топлива. Далее в настоящей заявке нормальные условия подачи топлива могут относиться к любым условиям, при которых топливо подается в цилиндры двигателя. В этом случае содержание воды в отработавших газах может быть пропорционально содержанию спирта (например, в процентах содержания этанола) в топливе, поступающем в двигатель. Поскольку влажность окружающей среды может также способствовать содержанию воды в отработавших газах, влажность окружающей среды, определяемая при отсутствии подачи топлива (например, в случае ОТРЗ), может быть вычтена из упомянутого содержания воды для более точного измерения содержания спирта в поступающем в двигатель топливе.
На графике 300 переход опорного напряжения кислородного датчика между первым напряжением V1 и вторым напряжением V2 происходит в один шаг. Другими словами, опорное напряжение изменяется непосредственно от первого напряжения V1 до второго напряжения V2 и обратно без переходов на любые промежуточные напряжения между первым напряжением V1 и вторым напряжением V2. Соответственно, также происходит переход тока накачки от первого тока накачки I1 ко второму току накачки I2 и обратно. Однако, как показано на графике 300, в результате изменения опорного напряжения от более высокого значения к более низкому в один шаг, ток накачки имеет отрицательный выброс от своего более низкого значения (I1). Постоянно повторяющиеся циклы (например, тысячи циклов) отрицательного выброса 306 тока Iр могут привести к деградации датчика.
График 308 содержит две кривые 310 и 312, которые показывают опорное напряжение и ток накачки кислородного датчика, соответственно, в зависимости от времени в условиях отсутствия подачи топлива. В одном из примеров, к условиям отсутствия подачи топлива может относиться случай отсечки топлива в режиме замедления (ОТРЗ). В случае ОТРЗ через кислородный датчик проходит только окружающий воздух, и, следовательно, датчик находится в условиях более низкой влажности, чем при обычных условиях подачи топлива (например, при подаче топлива в цилиндры двигателя). На кривой 312 видно, что условия низкой влажности могут увеличить отрицательные выбросы Ip. Отрицательный выброс 316 Ip в условиях ОТРЗ больше отрицательного выброса 306 Ip в нормальных условиях подачи топлива. Кроме того, в условиях ОТРЗ положительный выброс 314 Ip наблюдается при переходе опорного напряжения от более низкого первого напряжения до более высокого второго напряжения. В этом случае Ip превышает свое более высокое целевое значение (I3), и, затем, возврат тока Ip обратно к более высокому значению I3 занимает определенное время. Положительный выброс 314 Ip и задержка во времени установления могут привести к деградации датчика. Условия низкой влажности, в качестве примера, при условии ОТРЗ, могут привести к положительным и отрицательным выбросам Ip, что может привести к повышенному повреждению датчика и снижению функциональности датчика. Таким образом, изменения опорного напряжения кислородного датчика за один шаг и условия низкой влажности могут способствовать деградации датчика.
На фиг. 4 график 400 показывает две кривые тока Ip кислородного датчика, получаемые при двух различных скоростях изменения, используемых для регулирования напряжения Vs кислородного датчика между более низким первым значением и более высоким вторым значением. Напряжение Vs изменяется между первым и вторым значениями для определения различных параметров работы двигателя (например, содержания воды в отработавших газах, содержания воды во впускном газе, влажности окружающего воздуха, количества спирта в поступающем в двигатель топливе, и т.д.) с использованием способов, описанных ранее на фиг. 3. Кривые 402 и 404 напряжения Vs показывают линейное увеличение от первого более низкого напряжения (V1) до второго более высокого напряжения (V2) с разной скоростью изменения. Кривая 402 напряжения Vs показывает скорость возрастания от V1, к V2 и скорость уменьшения от V2 к V1 меньшие, чем напряжения Vs на кривой 404. График 400 также содержит кривую 406 тока Ip, полученную в результате приложения напряжения Vs, соответствующего кривой 402, и кривую 408 тока Iр, полученную в результате приложения напряжения Vs, соответствующего кривой 404. На кривой 406 тока Iр величина положительного выброса 412 тока Ip и величина отрицательного выброса 416 тока Ip меньше величины положительного выброса 410 тока Ip и величины отрицательного выброса 418 тока Ip на кривой 408. Таким образом, более плавное увеличение опорного напряжения кислородного датчика от V1 до V2, как показано на кривой 402, может уменьшить величину положительного выброса Ip по сравнению с нарастанием на кривой 404 с более высокой скоростью. Аналогичным образом, более плавное снижение напряжения от V2 до V1, как показано на кривой 402, может способствовать уменьшению величины отрицательного выброса Ip по сравнению с нарастанием на кривой 404 с более высокой скоростью.
В одном из примеров скорость изменения опорного напряжения, показанная на кривой 404, может происходить за один шаг, при этом переходы опорного напряжения происходят непосредственно от к V2 и обратно. В другом примере изменение опорного напряжения, показанное кривой 404, может происходить с более высокой скоростью (таким образом, участок 404 имеет больший наклон), чем скорость изменения опорного напряжения, показанного кривой 404 (наклон которой может быть меньше). Переход между V1 и V2 со скоростью, меньшей, чем скорость изменения за один шаг и/или уменьшение скорости изменения между V1 и V2, могут способствовать уменьшению величины положительных и отрицательных выбросов Iр, тем самым снижая деградацию кислородного датчика вследствие выгорания датчика и/или колебания тока накачки. В результате срок эксплуатации кислородного датчика может быть увеличен. Кроме того, снижение скорости изменения между и V2 может уменьшить время установления (например, уменьшить время, требуемое для возврата датчика к своему базовому напряжению V1), тем самым уменьшая время работы по подаче топлива без обратной связи.
На фиг. 5 показан график 500 примера функции изменения при переходе опорного напряжения (Vs) кислородного датчика между более низким первым напряжением, V1 и более высоким вторым напряжением, V2. Целью плавного изменения является обеспечение более постепенного перехода между первым и вторым напряжениями для уменьшения деградации датчика. Во временном интервале 504 к ячейке накачки (например, к паре электродов 212 и 214 накачки) прикладывается первое опорное напряжение (т.е. первое напряжение), достаточно малое для предотвращения диссоциации молекул воды. В одном из примеров первое напряжение составляет приблизительно 450 мВ. В других вариантах осуществления первое напряжение может быть другим опорным напряжением, при котором не происходит диссоциация воды. Первое напряжение может вызывать ток накачки, который может быть использован для измерения содержания кислорода в пробе газа, как описано в упомянутых ранее способах.
Затем опорное напряжение возрастает во временном интервале 506 от первого напряжения, при котором не происходит диссоциация молекул воды, до второго напряжения, при котором диссоциация молекул воды происходит. В одном из примеров второе напряжение может приблизительно составлять 1,2 В (то есть 1200 мВ). В альтернативных вариантах осуществления второе напряжение может быть другим напряжением, при котором на датчике не происходит диссоциация молекул воды. Подача второго напряжения в течение интервала времени 508 может вызывать второй ток накачки, который может быть использован для оценки содержания кислорода и воды в пробе газа, которые, как описано ранее, затем могут быть использованы для оценки влажности окружающей среды и содержания спирта в поступающем топливе. Следующим шагом, во временном интервале 510, опорное напряжение снижается от второго напряжения до первого напряжения, которое поддерживается в этом интервале времени. Далее приведено описание нескольких вариантов осуществления способов увеличения или уменьшения Vs между первым более низким и вторым более высоким напряжениями. Важно отметить, что во всех следующих способах скорости увеличения и уменьшения напряжений могут быть либо предварительно установлены, либо могут быть переменными в зависимости от рабочих параметров двигателя транспортного средства. В качестве примера, если обнаружены условия низкой влажности, скорость, с которой происходит переход кислородного датчика между первым и вторым опорными напряжениями, может быть уменьшена, так как результатом условий низкой влажности может быть еще большая деградация датчика (как описано более подробно на фиг. 7).
Во время интервалов 506 и 510 может происходить переход опорного напряжения между первым и вторым напряжениями с регулируемой скоростью изменения. Изменение может происходить по линейной функции или по другой гладкой функции, скорость изменения которой может плавно снижаться по мере приближения опорного напряжения до более высокого второго напряжения. В другом варианте осуществления напряжение может быть увеличено за несколько шагов приращения, которые могут быть одинаковыми по величине или могут уменьшаться по величине по мере приближения опорного напряжения до второго напряжения.
В другом варианте осуществления, как показано на кривой 502, во временном интервале 506 опорное напряжение может быть увеличено в один шаг от первого напряжения V1 до промежуточного напряжения (ПН), при котором только начинает происходить диссоциация молекул воды. Другими словами, увеличение опорного напряжения может осуществляться непосредственно от первого напряжения до промежуточного напряжения ПН за один шаг и без каких-либо дополнительных промежуточных шагов. В одном из примеров, как показано на графике 500, промежуточное напряжение составляет приблизительно 900 мВ. В другом примере промежуточное напряжение может принимать другое значение между первым и вторым напряжениями, при котором молекулы воды переходят из состояния, при котором не происходит диссоциация, в состояние, при котором на кислородном датчике происходит диссоциация. В еще одном примере промежуточное напряжение может быть опорным напряжением, ниже которого начинает происходить диссоциация молекул воды на кислородном датчике.
После этого опорное напряжение постепенно увеличивается от промежуточного напряжения до второго напряжения. Функция изменения может быть не применена во временном промежутке 506 для увеличения Vs от первого напряжения до промежуточного напряжения, так как во время перехода между уровнями напряжения, при которых не происходит диссоциация молекул воды (например, между 450 и 900 мВ), может не происходить деградация датчика. Таким образом, переход от первого до промежуточного напряжения за один шаг уменьшает время, затрачиваемое на умеренных уровнях напряжения, и увеличивает скорость измерения, с которой может работать датчик, что увеличивает его точность. Уменьшенная скорость, с которой может происходить увеличение опорного напряжения от промежуточного напряжения до второго напряжения, может быть определена линейной функцией или другой гладкой функцией, при которой скорость увеличения может постепенно уменьшаться по мере приближения опорного напряжения до более высокого второго напряжения. Напряжение также может быть увеличено от промежуточного до второго напряжения в ряд шагов приращения, которые могут быть одинаковыми по размеру, или уменьшаться в размерах по мере приближения опорного напряжения до второго напряжения. Этот же процесс может быть применен в обратную сторону, как видно на временном интервале 510 кривой 502. Опорное напряжение может быть уменьшено от второго напряжения до промежуточного напряжения, при котором процесс диссоциации молекул воды начинает останавливаться (например, 900 мВ), постепенно (например, шагами приращения, линейно или по другой гладкой функции). Наконец, опорное напряжение может быть уменьшено от промежуточного напряжения до первого напряжения в один шаг (или с более высокой скоростью, по сравнению со скоростью изменения от второго напряжения до промежуточного напряжения).
Таким образом, в одном из вариантов осуществления способы могут содержать более постепенное изменение (или переход) опорного напряжения кислородного датчика между первым и вторым напряжениями, нежели при изменении в один шаг. В другом варианте осуществления способы могут содержать уменьшение скорости изменения опорного напряжения между первым и вторым напряжениями. В результате уменьшения скорости перехода между первым и вторым опорными напряжениями кислородного датчика деградация кислородного датчика может быть уменьшена.
На фиг. 6 показан способ 600 регулирования работы кислородного датчика (например, кислородных датчиков 126 или 127, показанных на фиг. 1). Команды реализации способа 600 могут храниться на запоминающем устройстве контроллера (например, на постоянном запоминающем устройстве 106 контроллера 12, показанного на фиг. 1). Таким образом, контроллер может реализовывать способ 600 на основе сигналов, полученных от различных датчиков двигателя, как описано ранее на фиг. 1.
Способ 600 начинается на этапе 602 оценкой и/или измерением рабочих параметров двигателя. Рабочие параметры двигателя содержат влажность окружающего воздуха, частоту вращения и нагрузку двигателя, воздушно-топливное отношение, массовый расход воздуха, температуру двигателя, количество впрыскиваемого топлива и т.д. Способ 600 переходит от этапа 602 к этапу 604, на котором происходит определение контроллером требуемой скорости изменения напряжения кислородного датчика в зависимости от условий работы двигателя. Как описано ранее, требуемая скорость изменения может быть требуемой скоростью, с которой происходит регулирование опорного напряжения кислородного датчика между первым напряжением и вторым напряжением. Первое напряжение может быть более низким, базовым напряжением, при котором не происходит диссоциации молекул воды, а второе напряжение может быть более высоким целевым напряжением, при котором происходит диссоциации молекул воды. Требуемая скорость изменения может быть основана на условиях работы двигателя, в том числе на влажности окружающей среды и условиях подачи топлива в двигатель. Например, требуемая скорость изменения может быть снижена при уменьшении влажности окружающей среды. В другом примере требуемая скорость изменения может быть снижена при уменьшении подачи топлива в двигатель. В другом примере требуемая скорость изменения может быть более низкой в условиях отсутствия подачи топлива, таких как случай отсечки топлива в режиме замедления (ОТРЗ), нежели в условиях подачи топлива в цилиндры двигателя. В других примерах требуемая скорость изменения может быть снижена при увеличении содержания кислорода в окружающем кислородный датчик воздухе.
На этапе 606 способ содержит определение величины требуемого шага приращения и временного интервала, за который происходит приращение по шагам со скоростью, основанной на определенной требуемой скорости изменения. Требуемая величина шага приращения может быть основана на интервале времени, за который происходит изменение (или увеличение от первого напряжения до второго напряжения), требуемой скорости изменения и требуемой величине шага. Требуемая величина шага может быть требуемым постепенным увеличением опорного напряжения. Требуемая величина шага может быть также основана на количестве всех шагов изменения. В качестве альтернативы, общее количество шагов изменения может быть основано на скорости изменения, величине шага и интервале времени изменения.
После определения контроллером размера шага приращения он посылает кислородному датчику сигнал для соответственного регулирования опорного напряжения. Важно отметить, что при увеличении напряжения от первого до второго напряжения величина шага приращения может не быть постоянной в течение каждого изменения. Например, снижение скорости увеличения напряжения может быть необходимо при приближении приложенного напряжения до более высокого второго напряжения, при котором возможны более сильные повреждения датчика. В другом варианте осуществления на этапе 606 может быть реализована гладкая функция изменения (например, линейная, логарифмическая или другая гладкая функция). В этом варианте наклон или скорость увеличения опорного напряжения определяется на этапе 604. Скорость изменения может быть постоянной (например, линейной), но также может изменяться в течение интервала времени, на котором происходит увеличение напряжения от первого до второго напряжения. В качестве примера, при приближении приложенного напряжения до второго напряжения, при котором вода начинает диссоциировать и может вызвать более сильное повреждение датчика, скорость изменения может быть снижена.
После определения требуемой скорости изменения, величины шага приращения (если функция изменения не является гладкой функцией) и интервала времени для повышения напряжения, способ 600 может опционально перейти к этапу 608, на котором контроллер посылает датчику кислорода сигнал об увеличении опорного напряжения от первого напряжения до промежуточного напряжения за один шаг (например, не с уменьшенной скоростью увеличения). Промежуточное напряжение может больше первого напряжения и меньше второго напряжения. В одном из примеров промежуточное напряжение может быть опорным напряжением, при котором начинает происходить диссоциация воды. В другом примере промежуточное опорное напряжение может быть опорным напряжением, выше которого происходит диссоциация воды. В еще одном примере промежуточное напряжение может быть опорным напряжением, при котором не происходит диссоциация воды. По существу, увеличение опорного напряжения кислородного датчика от первого напряжения до промежуточного напряжения по ступенчатой функции происходит перед началом изменения с уменьшенной скоростью, определенной на этапе 604.
Способ 600 может перейти к этапу 610 с этапа 606 или от опционального этапа 608. При переходе по способу 600 к этапу 610 с этапа 606 контроллер посылает сигнал на кислородный датчик для изменения опорного напряжения от первого до второго напряжения со скоростью или с величиной шага, определенными на этапах 604 и/или 606. В качестве альтернативы, при переходе способа 600 на этап 610 с этапа 608 контроллер посылает сигнал на кислородный датчик для изменения опорного напряжения от промежуточного напряжения до второго напряжения со скоростью или с величиной шага, определенными на этапах 604 и/или 606. Таким образом, при включении в способ 600 этапа 608 опорное напряжение может быть увеличено от первого до второго напряжения за меньшее время, нежели при прямом переходе от этапа 606 к этапу 610, так как постепенное линейное изменение начинается от более высокого напряжения (например, от промежуточного напряжения вместо базового первого напряжения), в результате чего увеличивается скорость повторения цикла датчика. Таким образом может быть повышена точность измерений кислородного датчика. Кроме того, если способ 600 содержит необязательный этап 608, состояние датчика не может ухудшиться, поскольку деградация датчика может происходить только в интервалах ступенчатого изменения напряжения, при которых на датчике происходит диссоциация воды, что более подробно раскрыто ранее со ссылкой на фиг. 5.
При достижении приложенным напряжением требуемого более высокого второго напряжения на этапе 610, способ 600 переходит к этапу 612, на котором контроллер может осуществлять определение рабочих параметров двигателя на основе обратной связи от датчика при первом и втором напряжениях. Контроллер может осуществлять определение влажности окружающего воздуха, воздушно-топливного отношения, содержания воды в газе в непосредственной близости от кислородного датчика, содержания спирта в топливе и скорости РОГ и тому подобного на основе отличий тока накачки кислородного датчика при первом и втором напряжениях. Способ 600 затем переходит к этапу 614, на котором контроллер осуществляет регулирование работы двигателя на основе определенных рабочих параметров (например, рабочих параметров, рассчитанных на основе показаний кислородного датчика). В качестве примера, двигатель может увеличить количество отработавших газов, возвращенных во впускной канал, если содержание несгоревшего топлива в выпускном канале достигает достаточно высокого первого порогового уровня. В другом примере контроллер может осуществлять регулирование впрыска топлива на основе вычисленного воздушно-топливного отношения.
Таким образом, контроллер может регулировать работу двигателя на основе выходных сигналов кислородного датчика. Кроме того, контроллер может определять скорость, с которой происходит увеличение опорного напряжения кислородного датчика от более низкого первого напряжения до более высокого второго напряжения (и уменьшение со второго напряжения до первого напряжения) на основе параметров работы двигателя, в том числе влажности окружающей среды и подачи топлива в двигатель. В результате деградация кислородного датчика от выгорания датчика и колебаний может быть уменьшена.
Как показано на фиг. 6, в одном из вариантов осуществления способ содержит увеличение опорного напряжения кислородного датчика от первого напряжения до промежуточного второго напряжения за один шаг; и увеличение опорного напряжения от промежуточного второго напряжения до третьего напряжения последовательно за несколько шагов. В одном из примеров величину каждого из нескольких шагов определяют на основе требуемой скорости изменения, общего времени изменения для повышения от промежуточного второго напряжения до третьего напряжения и требуемого времени шага. Кроме того, требуемая скорость изменения может быть определена в зависимости от условий влажности окружающей среды и/или условий подачи топлива в двигатель. Способ может дополнительно содержать уменьшение требуемой скорости изменения и увеличение общего времени изменения во время отсечки топлива в режиме замедления. В одном из примеров этот способ может дополнительно содержать снижение требуемой скорости изменения и повышение общего времени изменения при уменьшении влажности окружающей среды. Первое напряжение может представлять собой базовое напряжение, при котором не происходит диссоциация воды, а третье напряжение может представлять собой целевое напряжение, при котором происходит диссоциация воды. Кроме того, промежуточное второе напряжение находится между первым напряжением и третьим напряжением.
На фиг. 7 показан график 700, на котором видно, как может происходить регулирование контроллером (например, контроллером 12, показанным на фиг. 1) скорости изменения опорного напряжения кислородного датчика между более низким первым напряжением и более высоким вторым напряжением на основе рабочих параметров двигателя, таких как подача топлива и/или влажность окружающей среды. На графике 706 показано, как может изменяться подача топлива в двигатель во времени, и, аналогично, на графике 708 показано, как может изменяться влажность воздуха из окружающей среды, проходящего через двигатель, в зависимости от времени. На графике 702 показано регулирование скорости изменения опорного напряжения кислородного датчика в ответ на изменения подачи топлива и/или влажности окружающей среды, показанные на кривых 706 и 708. Кривая 704 показывает изменения полученного тока накачки кислородного датчика в соответствии с кривой 702.
Подача топлива и влажность окружающей среды показаны на первом уровне в промежутке времени от t0 до t1. Таким образом, этот интервал времени может соответствовать нормальным условиям работы двигателя, при которых происходит подача топлива в двигатель (например, топливо подается в цилиндры двигателя), и влажность окружающей среды выше нижнего порогового уровня. В момент времени t1 контроллер может зафиксировать снижение количества подаваемого в двигатель топлива ниже порогового уровня. В одном из примеров уменьшение подачи топлива в двигатель ниже порогового уровня может быть результатом события ОТРЗ или другого условия прекращения подачи топлива. Оно может вызвать уменьшение влажности газовой смеси, так как от содержания воды в топливе зависит общая влажность газовой смеси в камере сгорания. Кроме того, в условиях прекращения подачи топлива содержание кислорода в отработавших газах, поступающих к кислородному датчику отработавших газов (расположенному в выпускном канале ниже по потоку от цилиндров двигателя), может быть увеличено. Это уменьшение влажности и увеличение содержания кислорода может привести к увеличению положительных и отрицательных выбросов тока накачки и/или к увеличению времени установления кислородного датчика, что способствует деградации датчика. Таким образом, в ответ на уменьшение подачи топлива в двигатель, контроллер может снизить скорость изменения, с которой опорное напряжение кислородного датчика (например, кислородного датчика отработавших газов) возрастает от первого напряжения до второго напряжения и уменьшается от второго напряжения до первого напряжения. Это видно на кривой 702. В промежутке времени между t1 и t2, в котором количество подаваемого в двигатель топлива уменьшается от первого уровня F1, скорость увеличения опорного напряжения от первого нижнего напряжения до второго верхнего напряжения (то есть, второй наклон 712 кривой 702) меньше скорости в промежутке времени между t0 и t1 (то есть, меньше первого наклона 710 кривой 702).
После возврата условий подачи топлива к первому уровню F1 в момент времени t2, скорость изменения опорного напряжения (например, скорость изменения между первым и вторым напряжениями) на кривой 702 возвращается к такой же скорости, что и в промежутке времени от t0 до t1. Таким образом, скорость изменения опорного напряжения снова увеличивается после момента времени t2. В момент t3 контроллер обнаруживает уменьшение влажности окружающей среды от первого уровня А1 ниже нижнего порогового уровня. Это может произойти при вхождении транспортного средства в особенно сухую окружающую среду, в которой содержание влаги в окружающем воздухе является очень низким. Поскольку условия низкой влажности могут привести к повышенной деградации кислородного датчика, контроллер может уменьшить скорость изменения, с которой происходят переходы опорного напряжения между более низким первым напряжением и более высоким вторым напряжением. Как видно на кривой 702, после момента времени t3 скорость изменения между более низким первым напряжением и более высоким вторым напряжением (например, третий наклон 714 кривой 702) меньше, чем между моментами времени t0 и и t2 и t3, когда влажность окружающей среды находится на первом уровне А1, и подача топлива в двигатель находится на первом уровне F1.
Как видно на кривой 702, скорость изменения напряжения увеличивается или уменьшается между более низким первым напряжением и более высоким вторым напряжением в зависимости от условий работы двигателя. Скорость изменения (также упоминаемая в данном документе как скорость изменения опорного напряжения) может быть уменьшена по мере снижения количества подаваемого в цилиндры двигателя топлива и/или влажности окружающей среды. В другом примере скорость изменения может быть снижена, только если количество подаваемого топлива и/или влажность окружающей среды ниже соответствующих пороговых уровней, основанных на уровнях, при которых положительные и отрицательные выбросы и/или время установления тока накачки кислородного датчика могут привести к деградации датчика. В некоторых примерах условия ОТРЗ могут действовать одновременно с условиями низкой влажности. В этом примере скорость изменения опорного напряжения кислородного датчика может быть снижена в ответ на условия ОТРЗ и условия низкой влажности окружающего воздуха одновременно. Например, скорость изменения может быть снижена сильнее (переход между первым напряжением и вторым напряжением может происходить еще более постепенно), чем в интервале времени между t1 и t2 или после t3, если происходит обнаружение контроллером как условий низкой влажности, так и условий ОТРЗ. Таким образом, условия ОТРЗ (или условия отсутствия подачи топлива) и условия низкой влажности могут быть не исключительными, и их одновременное присутствие может обуславливать более плавное изменение, нежели показано на графике 700.
Скорость изменения или более постепенного перехода между первым напряжением (например, базовым напряжением, при котором не происходит диссоциация воды) и вторым напряжением (например, целевым напряжением, при котором происходит диссоциация воды) меньше скорости перехода за один шаг (также упоминаемого как изменение между первым и вторым напряжениями за один шаг). Как раскрыто в настоящем документе, при работе двигателя опорное напряжение датчика кислорода чередуется между более низким первым напряжением и более высоким вторым напряжением в течение длительного интервала времени со скоростью, установленной контроллером в зависимости от условий работы двигателя. Скорость изменения между опорными напряжениями может быть регулируемой в зависимости от рабочих параметров двигателя. Однако, в одном из вариантов осуществления, скорость изменения опорного напряжения (например, скорость изменения) может быть всегда меньше скорости изменения за один непосредственный шаг между первым и вторым напряжениями. Таким образом, может существовать пороговая скорость изменения, основанная на скорости изменения между напряжениями за один шаг, причем скорость изменения напряжения кислородного датчика может оставаться ниже нее.
Таким образом, способ может содержать постепенное увеличение опорного напряжения, прикладываемого к кислородному датчику, с первой скоростью увеличения опорного напряжения в ходе первого увеличения опорного напряжения кислородного датчика от первого напряжения до второго напряжения; и,
в ответ на изменение условия работы двигателя, постепенное увеличение опорного напряжения, прикладываемого к кислородному датчику, со второй скоростью в ходе второго увеличения опорного напряжения кислородного датчика от первого напряжения до второго напряжения,
при этом кислородный датчик представляет собой кислородный датчик регулируемого напряжения с регулируемым опорным напряжением.
Как описано выше, кислородный датчик может быть кислородным датчиком регулируемого напряжения, расположенным в выпускном или впускном каналах двигателя. Опорное напряжение кислородного датчика регулируемого напряжения регулируется между первым напряжением и вторым напряжением, причем первое напряжение является более низким напряжением, при котором не происходит диссоциация воды на датчике, а второе напряжение является более высоким напряжением, при котором происходит диссоциация воды на датчике. Технический результат достигается за счет постепенного регулирования опорного напряжения кислородного датчика со скоростью изменения, основанной на условиях работы двигателя, что уменьшает деградацию кислородного датчика и увеличивает точность управления двигателем на основе выходных сигналов кислородного датчика. В частности, переход между первым и вторым напряжениями с более низкой скоростью изменения может способствовать снижению положительных и отрицательных выбросов и времени установления датчика, которые приводят к эффектам колебаний и выгорания датчика, ведущих к деградации датчика. Кроме того, эти эффекты могут стать более выраженными с увеличением содержания кислорода в газе, окружающем кислородный датчик. Таким образом, дополнительное снижение скорости изменения опорного напряжения кислородного датчика при увеличении содержания кислорода во впускных и/или отработавших газах (например, во время уменьшения подачи топлива в двигатель для кислородного датчика отработавших газов и во время низкой влажности окружающей среды для кислородных датчиков впускных и отработавших газов), может еще больше способствовать уменьшению деградации кислородного датчика.
В качестве одного из вариантов осуществления способ содержит постепенное увеличение опорного напряжения кислородного датчика от первого напряжения до второго напряжения со скоростью изменения, основанной на условиях работы двигателя. В одном из примеров скорость изменения основана на влажности окружающей среды, причем скорость изменения уменьшают с уменьшением влажности окружающей среды. В одном из примеров скорость изменения зависит от подачи топлива в двигатель, причем скорость изменения уменьшают с уменьшением подачи топлива в двигатель. Упомянутый способ дополнительно содержит уменьшение скорости изменения от первого уровня до более низкого второго уровня при условии отсутствия подачи топлива в двигатель.
В одном из вариантов осуществления способ дополнительно содержит в ходе многократного перехода опорного напряжения кислородного датчика между первым напряжением и третьим напряжением, причем кислородный датчик представляет собой кислородный датчик регулируемого напряжения с регулируемым опорным напряжением, для первого увеличения опорного напряжения от первого напряжения до третьего напряжения:
сначала увеличение опорного напряжения, прикладываемого к кислородному датчику, от первого напряжения до промежуточного второго напряжения за один шаг;
затем постепенное увеличение опорного напряжения, прикладываемого к кислородному датчику, от промежуточного второго напряжения до третьего напряжения в несколько шагов; и
регулирование работы двигателя на основе рабочего параметра двигателя, рассчитанного на основе разницы токов накачки, выдаваемых кислородным датчиком при первом напряжении и при третьем напряжении.
В одном из примеров промежуточное напряжение представляет собой напряжение, ниже которого не происходит диссоциация воды и выше которого диссоциация воды происходит. Кроме того, первое напряжение является базовым опорным напряжением, а второе напряжение - целевым напряжением, при котором происходит диссоциация воды. Способ дополнительно содержит постепенное уменьшение опорного напряжения от второго напряжения до первого напряжения с указанной скоростью изменения. В одном из примеров кислородный датчик является кислородным датчиком отработавших газов, расположенным в выпускном канале двигателя, и способ содержит определение содержания воды в отработавших газах на основании выходных сигналов кислородного датчика при первом напряжении и втором напряжении. Способ также может содержать определение содержания спирта в топливе на основе определенного содержания воды. В другом примере кислородный датчик является кислородным датчиком впускных газов, расположенным во впускном коллекторе двигателя, и способ дополнительно содержит определение содержания воды во впускном воздухе на основе выходных сигналов кислородного датчика при первом напряжении и втором напряжении.
В еще одном варианте осуществления система двигателя может содержать кислородный датчик отработавших газов, расположенный в выпускном канале ниже по потоку от цилиндра двигателя, и контроллер с машиночитаемыми командами для: постепенного увеличения опорного напряжения кислородного датчика отработавших газов от первого напряжения до второго напряжения с первой скоростью изменения во время первого условия при подаче топлива в двигатель и во время второго условия при отсутствии подачи топлива в двигатель, постепенного увеличения опорного напряжения кислородного датчика отработавших газов от первого напряжения до второго напряжения со второй скоростью изменения, более низкой, чем скорость изменения при первом условии. Увеличение опорного напряжения кислородного датчика отработавших газов от первого напряжения до второго напряжения при первом и втором условиях содержит увеличение опорного напряжения от первого напряжения до второго напряжения за несколько шагов приращения, причем количество шагов приращения и размер каждого из нескольких шагов приращения зависят как от первой скорости изменения, так и от второй скорости изменения. Кроме того, кислородный датчик отработавших газов является кислородным датчиком регулируемого напряжения, у которого первое напряжение является базовым напряжением, а второе напряжение является целевым напряжением, которое зависит от составляющей газа, содержание которого требуется определять с помощью кислородного датчика отработавших газов. Система двигателя может дополнительно содержать кислородный датчик впускного газа, расположенный во впускном канале выше по потоку от цилиндра двигателя.
Следует отметить, что представленные здесь примеры процедур управления и оценки могут быть использованы с различными конструкциями двигателей и/или транспортных средств. Раскрытые здесь способы и процедуры управления могут быть сохранены в виде исполняемых инструкций в энергонезависимой памяти и могут быть реализованы системой управления, содержащей контроллер в сочетании с различными датчиками, приводами и другими аппаратными средствами двигателя. Конкретные раскрытые здесь процедуры могут представлять собой любую одну или несколько из множества стратегий обработки, таких как событийно-ориентированная, основанная на прерываниях, многозадачная, многопоточная, и тому подобные. По существу, различные действия, операции и/или представленные функции могут быть выполнены в показанной последовательности, параллельно, или, в некоторых случаях, могут быть опущены. Аналогично, порядок обработки не обязателен для осуществления признаков и преимуществ раскрытых примеров вариантов осуществления, и предоставлен для простоты иллюстрации и описания. Одно или несколько из проиллюстрированных действий, операций и/или функций могут быть выполнены повторно, в зависимости от конкретной используемой стратегии. Кроме того, раскрытые действия, операции и/или функции могут графически представлять код, записанный на энергонезависимой памяти машиночитаемого носителя в системе управления двигателем, где указанные действия осуществляются путем выполнения команд в системе, содержащей различные аппаратные компоненты двигателя в сочетании с электронным контроллером.
Следует иметь в виду, что описанные здесь конфигурации и процедуры являются по существу примерами, и что эти конкретные варианты осуществления не следует рассматривать в ограничивающем смысле, так как возможны многочисленные вариации. Например, вышеупомянутая технология может быть применена в двигателях V-6, I-4, I-6, V-12, оппозитном четырехцилиндровом и других типах двигателей. Объем настоящего изобретения содержит все новые и неочевидные сочетания и частичные сочетания различных систем и конфигураций, а также другие раскрытые здесь признаки, функции и/или свойства.
Представленная ниже формула изобретения конкретно описывает определенные сочетания и частичные сочетания, которые являются новыми и неочевидными. Пункты этой формулы изобретения могут ссылаться на неопределенный элемент или "первый" элемент или их эквиваленты. Такие пункты формулы следует понимать как содержащие включение в объем одного или нескольких таких элементов и ни требующие, ни исключающие наличие двух или большего количества таких элементов. Другие сочетания и частичные сочетания раскрытых признаков, функций, элементов и/или свойств могут быть включены в объем путем внесения изменений в настоящие пункты формулы или посредством добавления новых пунктов формулы в настоящую или связанную заявку. Такие пункты формулы, будь они шире, уже, эквивалентны или отличны по объему от изначальной формулы, также считаются входящими в объем настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ РАСЧЕТА ВОЗДУШНО-ТОПЛИВНОГО ОТНОШЕНИЯ ПОСРЕДСТВОМ КИСЛОРОДНОГО ДАТЧИКА ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 2016 |
|
RU2691872C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ НА ОСНОВЕ ОЦЕНКИ СОДЕРЖАНИЯ СПИРТА В ТОПЛИВЕ | 2016 |
|
RU2717478C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ НА ОСНОВЕ ОЦЕНКИ ВОЗДУШНО-ТОПЛИВНОГО ОТНОШЕНИЯ ПОСРЕДСТВОМ КИСЛОРОДНОГО ДАТЧИКА С ИЗМЕНЯЕМЫМ НАПРЯЖЕНИЕМ | 2016 |
|
RU2717476C2 |
| Способ (варианты) и система для эксплуатации датчика отработавших газов с переменным напряжением в двигателе внутреннего сгорания | 2016 |
|
RU2717188C2 |
| СПОСОБ ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧИ ПРИ ОПРЕДЕЛЕНИИ ВЛАЖНОСТИ ОКРУЖАЮЩЕЙ СРЕДЫ (ВАРИАНТЫ) | 2016 |
|
RU2705351C2 |
| СПОСОБ КОМПЕНСАЦИИ СТАРЕНИЯ ДАТЧИКА КИСЛОРОДА (ВАРИАНТЫ) | 2015 |
|
RU2706512C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ОПРЕДЕЛЕНИЯ СОДЕРЖАНИЯ ВЛАГИ В ОКРУЖАЮЩЕМ ВОЗДУХЕ ПОСРЕДСТВОМ ДАТЧИКА ВЫХЛОПНЫХ ГАЗОВ | 2014 |
|
RU2665765C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ОЦЕНКИ РЕЦИРКУЛЯЦИИ ОТРАБОТАВШИХ ГАЗОВ С ПОМОЩЬЮ ДАТЧИКА КИСЛОРОДА В ОТРАБОТАВШИХ ГАЗАХ | 2017 |
|
RU2669451C1 |
| Способ обеспечения измерения влажности | 2016 |
|
RU2689227C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ СОСТАВА АНТИДЕТОНАЦИОННОЙ ЖИДКОСТИ | 2016 |
|
RU2704371C2 |




Изобретение может быть использовано в системах управления для двигателей внутреннего сгорания. Раскрыты способы и системы для регулирования скорости изменения опорного напряжения кислородного датчика. В одном из примеров способ может содержать постепенное увеличение опорного напряжения кислородного датчика от более низкого первого напряжения до более высокого второго напряжения с определенной скоростью изменения и/или в несколько шагов. Упомянутая скорость изменения может быть основана на условиях работы двигателя. Изобретение позволяет уменьшить нагрузку на датчик, продлить срок его работы и увеличить точность управления двигателем. 3 н. и 17 з.п. ф-лы, 7 ил.
1. Способ для двигателя, содержащий:
постепенное увеличение опорного напряжения, прикладываемого к кислородному датчику, с первой скоростью увеличения опорного напряжения в ходе первого увеличения опорного напряжения кислородного датчика от первого напряжения до второго напряжения; и,
в ответ на изменение условия работы двигателя, постепенное увеличение опорного напряжения, прикладываемого к кислородному датчику, со второй скоростью в ходе второго увеличения опорного напряжения кислородного датчика от первого напряжения до второго напряжения,
при этом кислородный датчик представляет собой кислородный датчик регулируемого напряжения с регулируемым опорным напряжением.
2. Способ по п. 1, отличающийся тем, что изменение условия работы двигателя включает изменение влажности окружающей среды, причем вторая скорость уменьшается относительно первой скорости в ответ на уменьшение влажности окружающей среды, при этом опорное напряжение кислородного датчика регулируемого напряжения регулируют в соответствии с сигналом, посланным в кислородный датчик посредством контроллера двигателя.
3. Способ по п. 1, отличающийся тем, что изменение условия работы двигателя включает изменение подачи топлива в двигатель, причем вторая скорость уменьшается относительно первой скорости в ответ на уменьшение подачи топлива в двигатель.
4. Способ по п. 3, отличающийся тем, что условие работы двигателя включает условие отсутствия подачи топлива в двигатель, при этом вторая скорость меньше первой скорости.
5. Способ по п. 1, отличающийся тем, что дополнительно содержит, в ходе как первого увеличения опорного напряжения, так и второго увеличения опорного напряжения, увеличение опорного напряжения от первого напряжения до промежуточного напряжения, имеющего значение между первым напряжением и вторым напряжением, за один шаг, и затем постепенное увеличение опорного напряжения от промежуточного напряжения до второго напряжения с первой или второй скоростью, причем скорость изменения в случае первой и второй скоростей меньше, чем при изменении за один шаг.
6. Способ по п. 5, отличающийся тем, что промежуточное напряжение является напряжением более высоким, чем напряжение, при котором диссоциация воды не происходит, и более низким, чем напряжение, при котором диссоциация воды происходит.
7. Способ по п. 1, отличающийся тем, что первое напряжение является базовым опорным напряжением и второе напряжение является целевым напряжением, при котором происходит диссоциация воды, при этом и первое напряжение, и второе напряжение больше нуля, а постепенное увеличение опорного напряжения включает постепенное увеличение опорного напряжения, прикладываемого к ячейке накачки кислорода кислородного датчика.
8. Способ по п. 1, отличающийся тем, что дополнительно содержит, в ходе первого уменьшения опорного напряжения от второго напряжения до первого напряжения вслед за первым увеличением, постепенное уменьшение опорного напряжения от второго напряжения до первого напряжения с первой скоростью, а в ходе второго уменьшения опорного напряжения от второго напряжения до первого напряжения вслед за вторым увеличением - уменьшение опорного напряжения от второго напряжения до первого напряжения со второй скоростью, при этом первая скорость и вторая скорость представляют собой скорости изменения опорного напряжения кислородного датчика между первым напряжением и вторым напряжением.
9. Способ по п. 1, отличающийся тем, что кислородный датчик является кислородным датчиком отработавших газов, расположенным в выпускном канале двигателя, и дополнительно содержит определение содержания воды в отработавших газах на основе разницы токов накачки, выдаваемых кислородным датчиком при первом напряжении и втором напряжении.
10. Способ по п. 9, отличающийся тем, что дополнительно содержит оценку содержания спирта в топливе на основе вычисленного содержания воды.
11. Способ по п. 1, отличающийся тем, что кислородный датчик является кислородным датчиком впускного газа, расположенным во впускном коллекторе двигателя, и тем, что дополнительно содержит определение содержания воды во впускном воздухе на основе разницы токов накачки, выдаваемых кислородным датчиком при первом напряжении и втором напряжении.
12. Способ для двигателя, содержащий, в ходе многократного перехода опорного напряжения кислородного датчика между первым напряжением и третьим напряжением, причем кислородный датчик представляет собой кислородный датчик регулируемого напряжения с регулируемым опорным напряжением, для первого увеличения опорного напряжения от первого напряжения до третьего напряжения:
сначала увеличение опорного напряжения, прикладываемого к кислородному датчику, от первого напряжения до промежуточного второго напряжения за один шаг;
затем постепенное увеличение опорного напряжения, прикладываемого к кислородному датчику, от промежуточного второго напряжения до третьего напряжения в несколько шагов; и
регулирование работы двигателя на основе рабочего параметра двигателя, рассчитанного на основе разницы токов накачки, выдаваемых кислородным датчиком при первом напряжении и при третьем напряжении.
13. Способ по п. 12, отличающийся тем, что величина каждого из нескольких шагов основана на требуемой скорости изменения, общем времени изменения от промежуточного второго напряжения до третьего напряжения и на требуемом времени шага.
14. Способ по п. 13, отличающийся тем, что требуемая скорость изменения зависит от условий влажности окружающей среды и/или условий подачи топлива в двигатель.
15. Способ по п. 14, отличающийся тем, что дополнительно содержит, в ходе второго увеличения опорного напряжения от первого напряжения до третьего напряжения, происходящего при отсечке топлива в режиме замедления, снижение требуемой скорости изменения и увеличение общего времени изменения.
16. Способ по п. 14, отличающийся тем, что дополнительно содержит, в ходе второго увеличения опорного напряжения от первого напряжения до третьего напряжения и в ответ на уменьшение влажности окружающей среды, снижение требуемой скорости изменения и увеличение общего времени изменения.
17. Способ по п. 12, отличающийся тем, что первое напряжение является базовым напряжением, при котором не происходит диссоциация воды, и третье напряжение является целевым напряжением, при котором диссоциация воды происходит, и тем, что промежуточное второе напряжение находится между первым напряжением и третьим напряжением.
18. Система двигателя, содержащая:
кислородный датчик отработавших газов, расположенный в выпускном канале ниже по потоку от цилиндра двигателя; и
контроллер с машиночитаемыми командами для:
во время первого условия при подаче топлива в цилиндр двигателя, постепенного увеличения опорного напряжения кислородного датчика отработавших газов от первого напряжения до второго напряжения с первой скоростью изменения для увеличения опорного напряжения; и
во время второго условия при отсутствии подачи топлива в двигатель, постепенного увеличения опорного напряжения кислородного датчика отработавших газов от первого напряжения до второго напряжения со второй скоростью изменения для увеличения опорного напряжения, более низкой, нежели первая скорость изменения.
19. Система по п. 18, отличающаяся тем, что есть возможность увеличения опорного напряжения кислородного датчика отработавших газов от первого напряжения до второго напряжения во время первого и второго условий, которое содержит увеличение опорного напряжения от первого напряжения до второго напряжения за несколько шагов приращения, причем количество шагов приращения и величина каждого из нескольких шагов приращения зависят от первой скорости изменения для увеличения опорного напряжения и второй скорости изменения для увеличения опорного напряжения.
20. Система по п. 18, отличающаяся тем, что кислородный датчик отработавших газов является кислородным датчиком регулируемого напряжения, причем первое напряжение является базовым напряжением, и второе напряжение является целевым напряжением, которое зависит от искомой составляющей газа, содержание которой нужно измерить кислородным датчиком отработавших газов.
| US 4614175 A1, 30.09.1986 | |||
| US 5833836 A1, 10.11.1998 | |||
| US 4741318 A1, 03.05.1988 | |||
| US 20110132342 A1, 09.06.2011 | |||
| 0 |
|
SU155442A1 | |

