Область техники, к которой относится изобретение
Изобретение относится к устройству определения по меньшей мере одной характеристики катушки индуктивности, предпочтительно применяемой для определения других характеристик измерительной катушки, например катушки, в которую погружается исполнительный элемент, например, на педали автомобиля или над которой скользит такой исполнительный элемент. Соответственно изобретение относится к способу и устройству для определения положения такого исполнительного элемента. Изобретение относится также к автомобилю с элементом управления, включающим исполнительный элемент.
Уровень техники
В принципе известно, например из US 6 469 500 B1, определение положения и, в отдельных случаях, скорости движущегося вперед и назад исполнительного элемента посредством катушки, в которую погружается этот исполнительный элемент. Согласно US 6 469 500 B1 исполнительный элемент включает постоянный магнит. Изменение полного сопротивления катушки или проходящего по ней тока регистрируют в качестве сигнала для определения положения исполнительного элемента.
Известно из US 7 053 603 B2, что для таких датчиков перемещения определяют и учитывают температурную зависимость омического сопротивления катушки.
В DE 10 2010 036 126 B3 раскрыт способ определения по меньшей мере одной величины параметра микрокатушки, причем микрокатушка не имеет проводного соединения проводкой с соответствующим измерительным устройством. При этом «разворачивают» частоту и измеряют частотную зависимость входного полного сопротивления антенны и сравнивают ее с частотной зависимостью, определенной аналитической моделью микрокатушки.
Катушки, в которые погружается исполнительный элемент на педали автомобиля или над которыми скользят такие исполнительные элементы, как правило, герметизированы для предотвращения попадания в них воды. Вода способна значительно изменить значение емкости катушки и, тем самым, исказить результаты измерения. Герметизация таких катушек очень трудоемка и затратна. Поэтому ищут способ отказаться от такой герметизации.
Раскрытие изобретения
Задача изобретения
В соответствии с этим, задачей настоящего изобретения является создание надежного способа определения по меньшей мере одной характеристики катушки, например, определения такой характеристики, которая зависит от влажности в катушке. Задачей является также создание соответствующего устройства. Кроме этого задача изобретения – упростить определение положения (или определения перемещения) исполнительного элемента, погружаемого в катушку, в частности, если измерительная катушка негерметизирована. В альтернативном варианте исполнительный элемент может скользить снаружи по измерительной катушке или своей часть перемещаться в катушке или над измерительной катушкой. Задачей является также предложить соответствующее устройство. В конечном счете, задача изобретения – предложить соответствующие автомобили с подобными катушками и исполнительными элементами, в которых можно отказаться от герметизации катушек.
Техническое решение
Эту задачу решают посредством способа с признаками пунктов 1 или 6 формулы изобретения и посредством устройства с признаками пунктов 10 или 14 формулы, а также посредством автомобиля с признаками пункта 16 формулы.
В одном из аспектов изобретения, в отношении которого отдельно и в комбинации с другими аспектами изобретения испрашивается правовая охрана, задачу решают посредством способа определения по меньшей мере одной характеристики катушки, предпочтительно измерительной катушки, используемой для измерения других параметров. Согласно изобретению, катушку моделируют в виде схемы с параллельным соединением емкости с цепью, содержащей последовательно соединенные сопротивление постоянному напряжению, зависимое от частоты сопротивление и индуктивность. (Этот этап является абстрактным рассмотрением, однако его результаты приводят к последующему требованию для соответствующих параметров.) К катушке последовательно подключают преобразователь тока/напряжения. На катушку подают, таким образом, переменное напряжение с первой частотой и с отличной от нуля постоянной составляющей напряжения (т.е. со смещением постоянного напряжения) и снимают (считывают) напряжение на преобразователе тока/напряжения со второй частотой, превосходящей первую частоту в четыре раза или более, чем в четыре раза. На основе по меньшей мере четырех считанных последовательно значений выводят полное сопротивление и фазовый угол при первой частоте. Из этих величин затем выводят значение сопротивления постоянному напряжению, зависимого от частоты сопротивления и/или индуктивности. В альтернативном варианте вторая частота кратна первой частоте с множителем во много раз больше чем четыре, т.е. в n раз больше, где n –натуральное число более 4, а полное сопротивление и фазовый угол выводят в этом случае по меньшей мере из n последовательно измеренных значений.
Предпочтительно на катушку дополнительно или последовательно подают переменное напряжение с третьей частотой, отличной от первой частоты, и с отличной от нуля постоянной составляющей напряжения (т.е. со смещением постоянной составляющей) и снимают (считывают) напряжение на преобразователе тока/напряжения со второй частотой или с четвертой частотой, которая в четыре раза или более превышает первую частоту, и выводят полное сопротивление и фазовый угол при третьей частоте на основе по меньшей мере четырех или более измеренных значений, снятых последовательно. При этом из двух полных сопротивлений и из двух фазовых углов выводят значение сопротивления постоянному напряжению, зависимого от частоты сопротивления и/или индуктивности. При наличии в общей сложности восьми значений можно надежно, т.е. с минимальными ошибками измерения, определить три параметра. Указанная модель катушки в виде схемы, в которой параллельно соединена емкость и последовательная цепь, включающая сопротивление постоянному напряжению, зависимое от частоты сопротивление и индуктивность, таким образом, оправдывается посредством вычисления соответствующих вышеуказанных параметров.
В одном из предпочтительных вариантов осуществления изобретения переменное напряжение на обоих этапах или переменное напряжение с первой и с третьей частотой – это соответственно синусоидальное напряжение, причем с отличающейся друг от друга частотой. При этом особенно эффективным оказалось, если третья частота в три раза превышает первую частоту.
Различные частоты также можно обеспечить с помощью напряжения в форме меандра, которое подается на разные фильтры, в частности, с пропусканием основной и третьей гармоники (с частотой, в три раза превосходящей частоту основной гармоники).
Посредством четырех (или более) последовательно снятых измеренных величин, превосходящих частоту в четыре или более раз, считывают ток или напряжение синхронизованно с угловым смещением 90° относительно фазы переменного напряжения. Предпочтительно считывание выполняют при фазовых значениях 0°, 90°, 180° и 270°.
Однако возможно считывание и при других значениях, например, при 15°, 105°, 195° и 285° или т.п.
Во втором аспекте изобретения, по которому отдельно и в комбинации с другими аспектами изобретения, в частности с указанным выше аспектом, предложен способ определения положения исполнительного элемента, причем части исполнительного элемента погружены в измерительную катушку по меньшей мере в одно определяемое положение и/или по меньшей мере части скользят по измерительной катушке снаружи, т.е. изменяется степень обхвата катушки исполнительным элементом, причем указанное положение выводят из индуктивности измерительной катушки. Согласно изобретению, по меньшей мере при двух разных частотах определяют соответствующие реактивные составляющие полного сопротивления измерительной катушки и на их основе определяют идеальную индуктивность, не зависящую от емкости измерительной катушки. Эта идеальная индуктивность зависит только от механических параметров, таких как перемещение (положение измерительной катушки) и возможно от температуры. Соответственно на основе этой идеальной индуктивности в указанном способе определяют указанное положение.
Без учета также имеющихся в модели катушки сопротивлений, а именно, «сопротивления постоянному напряжению» и «зависимого от частоты сопротивления» можно вывести следующую формулу расчета идеальной индуктивности L0 при первой частоте ω1 с соответствующим полным сопротивлением Z1 и соответствующей реактивной составляющей Im{Z1} и при второй частоте ω2 c полным сопротивлением Z2 и соответствующей реактивной составляющей Im{Z2}:

В одном из предпочтительных вариантов осуществления изобретения, если идеальная индуктивность зависит от температуры, предложено еще измерять температуру, при этом измеренное значение температуры используют при определении указанного положения.
Два полных сопротивления в этом способе определяют согласно первому аспекту изобретения, т.е. соответственно посредством четырех (или более) измеренных значений при двух частотах, предпочтительно представляющих напряжение на преобразователе ток/напряжение точно синхронно по фазе с интервалами 90° (или с соответствующими меньшими интервалами).
Устройство по настоящему изобретению для определения по меньшей мере одной характеристики катушки согласно третьему аспекту изобретения, по которому также отдельно или в комбинации с другими аспектами изобретения испрашивается правовая охрана, содержит преобразователь ток/напряжение (предпочтительно в виде простого измерительного сопротивления), подключаемый последовательно с катушкой, генератор входного переменного напряжения с постоянной составляющей напряжения, частотный преобразователь, схема выборки для выходного сигнала от преобразователя ток/напряжение, причем схема выборки выполняет считывание синфазно с входным переменным напряжением с частотой, превышающей в четыре раза или более чем в четыре раза частоту входного переменного напряжения, и блок обработки, в который поступают измеренные значения, считанные схемой выборки, и который с учетом модели катушки рассчитывает значение или значения сопротивления постоянному напряжению, зависимого от частоты сопротивления и/или индуктивности, при этом катушка моделируется в виде схемы с параллельным соединением емкости с цепью, содержащей последовательно соединенные сопротивление постоянному напряжению, зависимое от частоты сопротивление и индуктивность.
Частотный преобразователь может быть частотным мультипликатором или делителем частоты, который подключается при необходимости.
В одном из предпочтительных вариантов осуществления изобретения схема выборки содержит после выхода частотного преобразователя и после выхода преобразователя ток/напряжение соответственно по низкочастотному фильтру, а выходы обоих низкочастотных фильтров подаются в мультипликатор, выход которого может подаваться на аналого-цифровой преобразователь, выход которого, в свою очередь, подается в микропроцессорный блок обработки данных. В альтернативном варианте схема выборки подает выходной сигнал частотного преобразователя и выходной сигнал преобразователя ток/напряжение на мультипликатор, выходной сигнал которого проходит через низкочастотный фильтр, выход которого подается на первый аналого-цифровой преобразователь, выход которого, в свою очередь, подается на микропроцессор в качестве блока обработки данных, причем выходной сигнал мультипликатора может подаваться в полосовой фильтр, выходной сигнал которого подается на тот же первый аналого-цифровой анализатор или на второй аналого-цифровой анализатор, выходной сигнал которого подается, в свою очередь, на микропроцессор.
Преимуществом первого варианта осуществления изобретения с двумя низкочастотными фильтрами является очень раннее отфильтровывание сигналов помех. Преимуществом варианта с мультипликатором вначале является очень точное по фазе измерение.
Устройство для определения положения исполнительного элемента с измерительной катушкой, в которую исполнительный элемент погружается по меньшей мере в одно определяемое положение, содержит, согласно четвертому аспекту изобретения, по которому отдельно или в комбинации с другими аспектами изобретения испрашивается правовая охрана, устройство для определения полного сопротивления измерительной катушки или по меньшей мере реактивной составляющей полного сопротивления измерительной катушки при двух разных частотах для определения идеальной индуктивности катушки, не зависящей от емкости измерительной катушки, и устройство для определения положения исполнительного элемента на основе этой идеальной индуктивности, которое может быть фактически выведено из характеристики идеальной индуктивности.
В этом устройстве измерительную катушку необязательно герметизировать, так как емкость вычитается до определения положения исполнительного элемента, поскольку проникающая влага влияет главным образом на емкость.
Предпочтительно в устройстве для определения положения исполнительного элемента используют устройство для определения по меньшей мере одной характеристики катушки по описанному ранее третьему аспекту изобретения.
Автомобиль, соответствующий изобретению, содержит исполнительный орган с исполнительным элементом и устройство для определения положения исполнительного элемента согласно изобретению. По меньшей мере частично исполнительный элемент исполнительного органа погружен в измерительную катушку устройства для определения положения исполнительного элемента и/или по меньшей мере части скользят снаружи по измерительной катушке, и в зависимости от положения исполнительного элемента по меньшей мере при определенных условиях возникает реакция узла автомобиля. Исполнительным элементом является педаль тормоза или педаль газа, или иной элемент автомобиля, положение которого, т.е. перемещение и/или угол, может изменяться и его требуется определить.
Наряду с применением различных аспектов настоящего изобретения в заявленном автомобиле, изобретение имеет и другое промышленное применения, в котором катушки используют в качестве сопоставимых датчиков положения, например в машиностроении, например в станкостроении или в измерительных или испытательных устройствах.
Краткое описание чертежей
В приложенных чертежах схематично изображено:
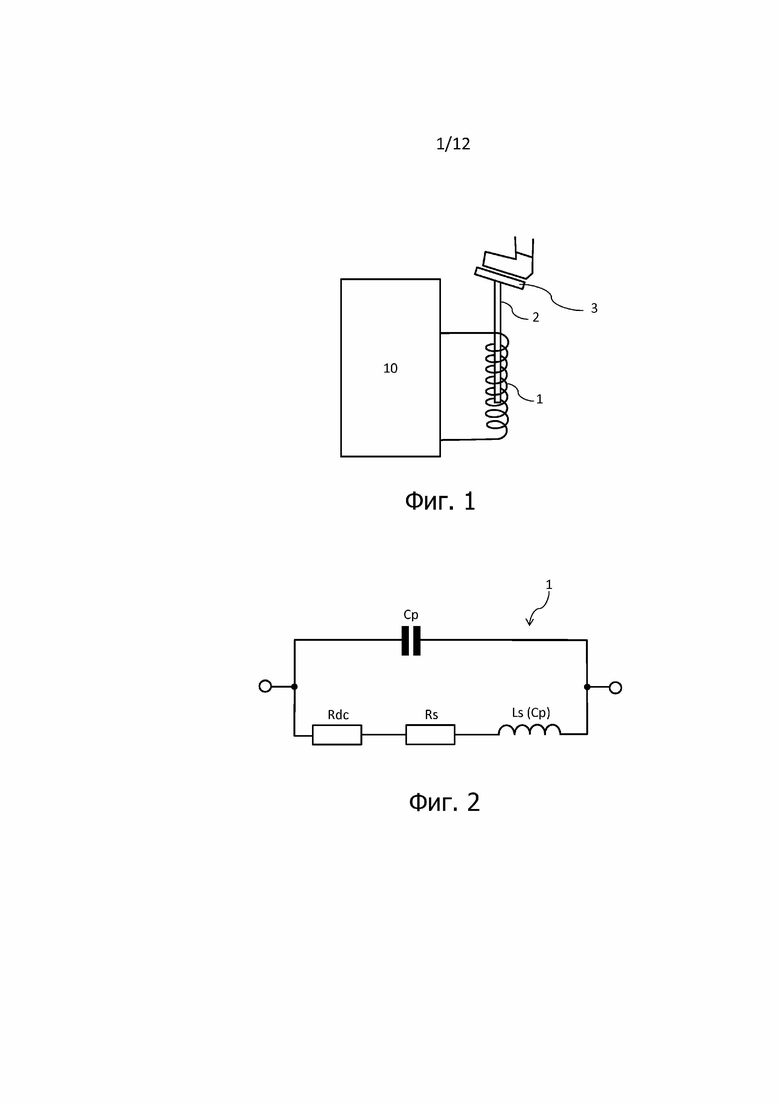
фиг. 1 показывает принцип измерения перемещения педали, положенный в основу некоторых аспектов настоящего изобретения;
фиг. 2 - эквивалентная схема модели измерительной катушки с предложенным по фиг. 1 принципом действия;
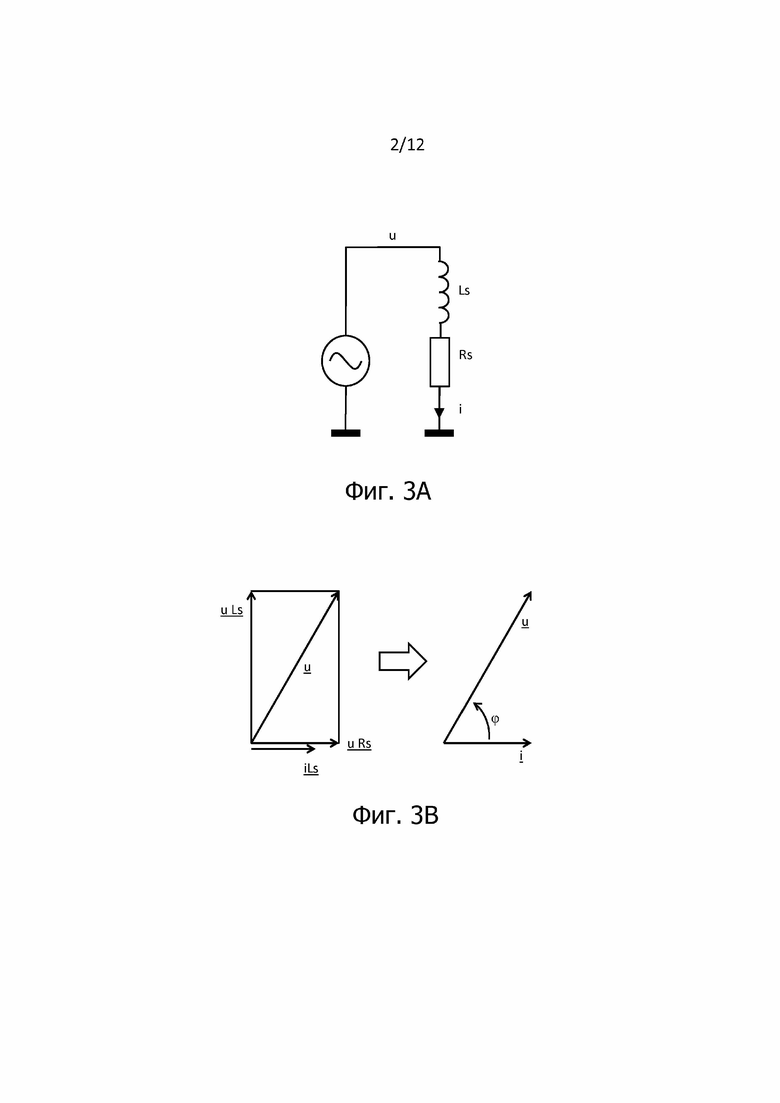
фиг. 3А - принципиальная схема индуктивности, соединенной последовательно с сопротивлением;
фиг. 3В - соответствующая векторная диаграмма с векторами тока и напряжения;
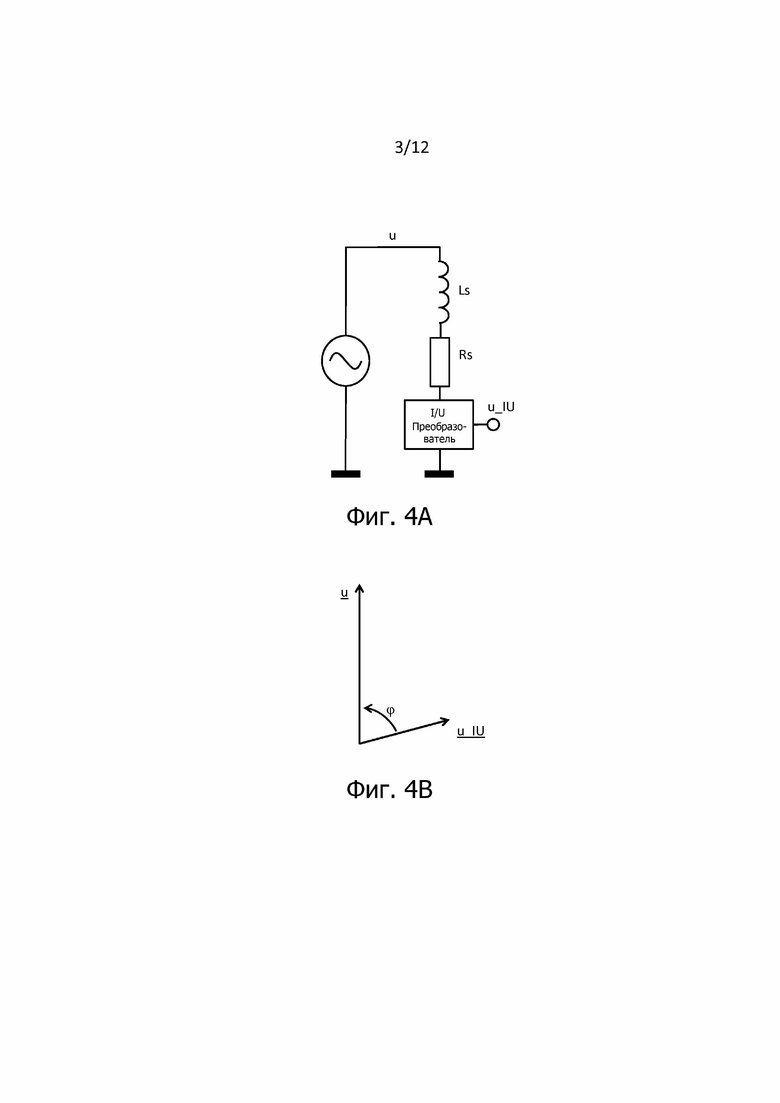
фиг. 4А - модификация принципиальной схемы по фиг. 3А с преобразователем ток/напряжение;
фиг. 4В - с соответствующая векторная диаграмма;
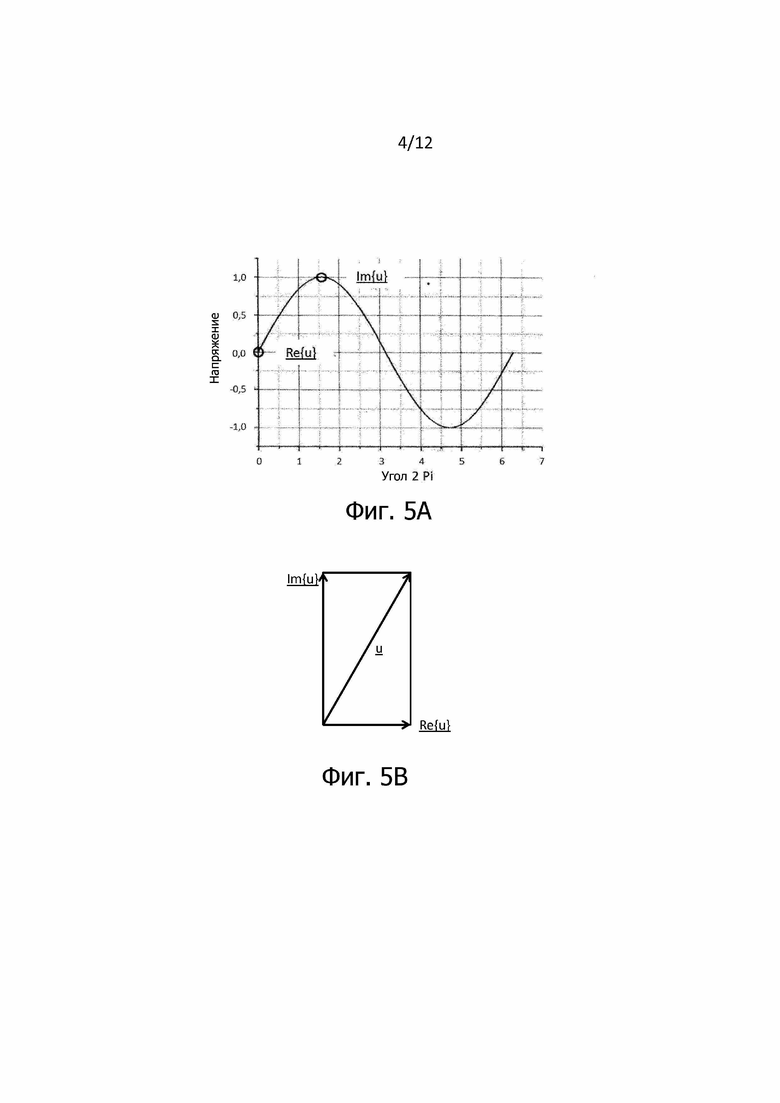
фиг. 5А - принцип считывания измеренных значений со смещением 90°;
фиг. 5В - соответствующая векторная диаграмма;
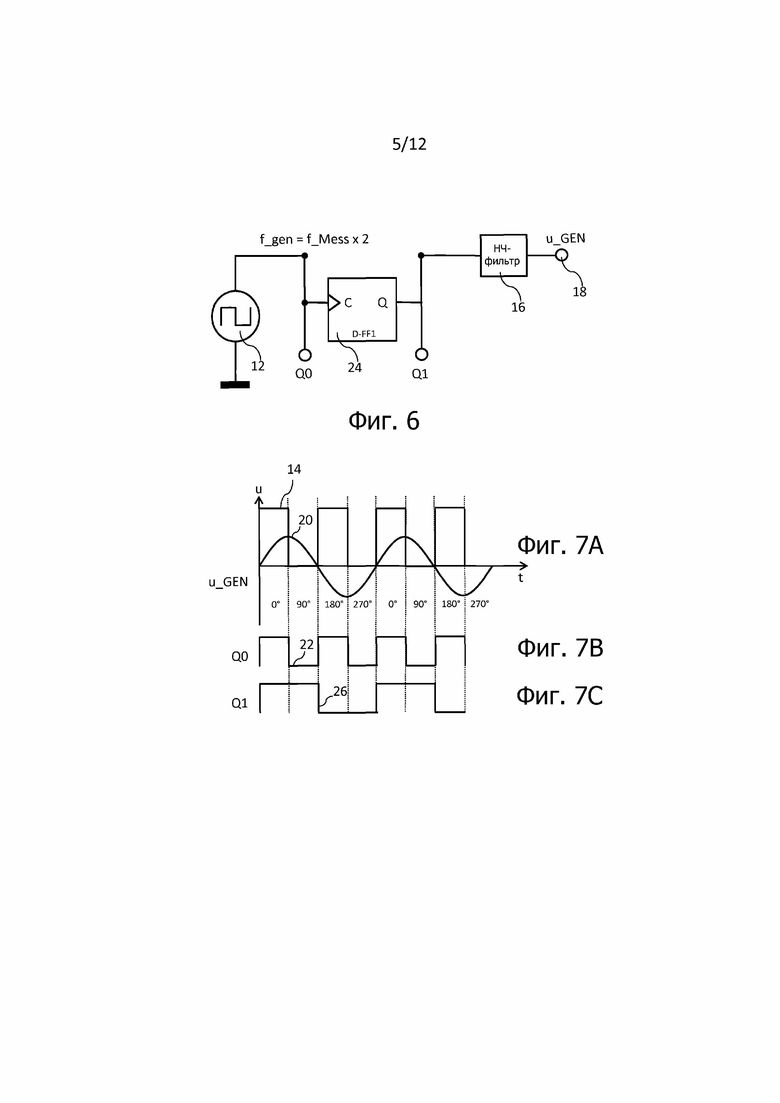
фиг. 6 - принципиальная схема, иллюстрирующая основной принцип формирования напряжения в одном из вариантов осуществления изобретения;
фиг. 7А-7С - напряжение, снятое в нескольких точках, показанных на фиг. 6;
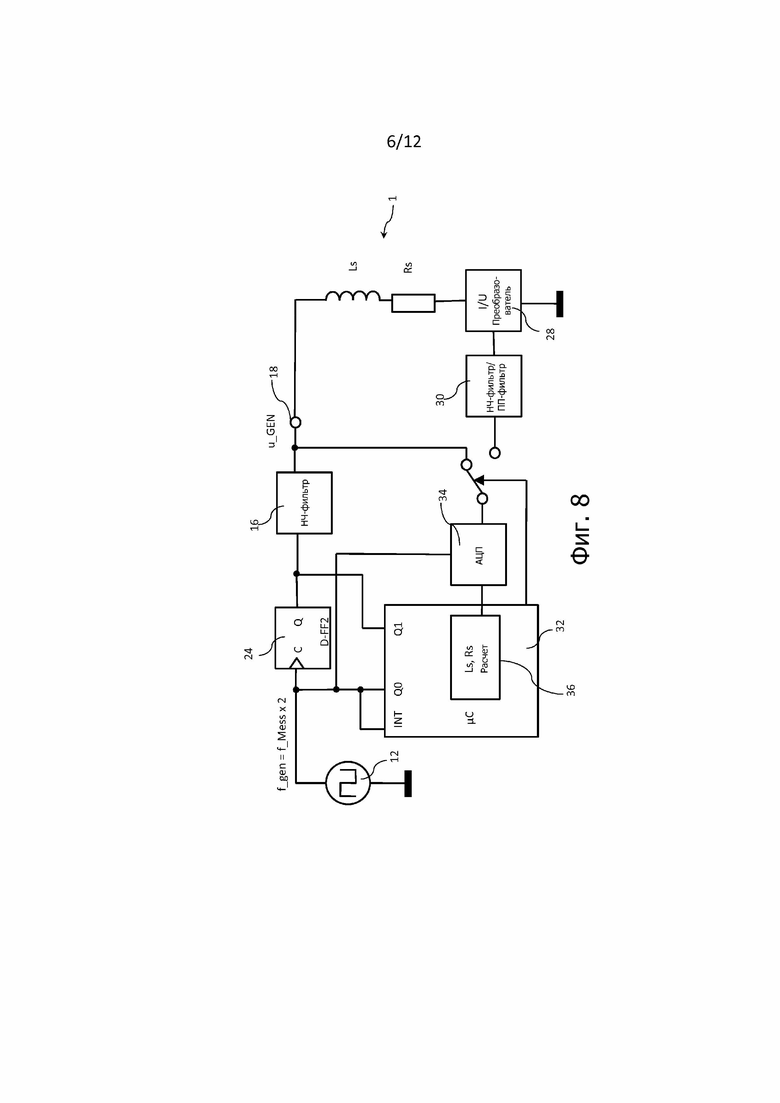
фиг. 8 - принципиальная схема для осуществления способа определения по меньшей мере одной характеристики измерительной катушки с использованием принципа, поясненного на основе фиг. 6;
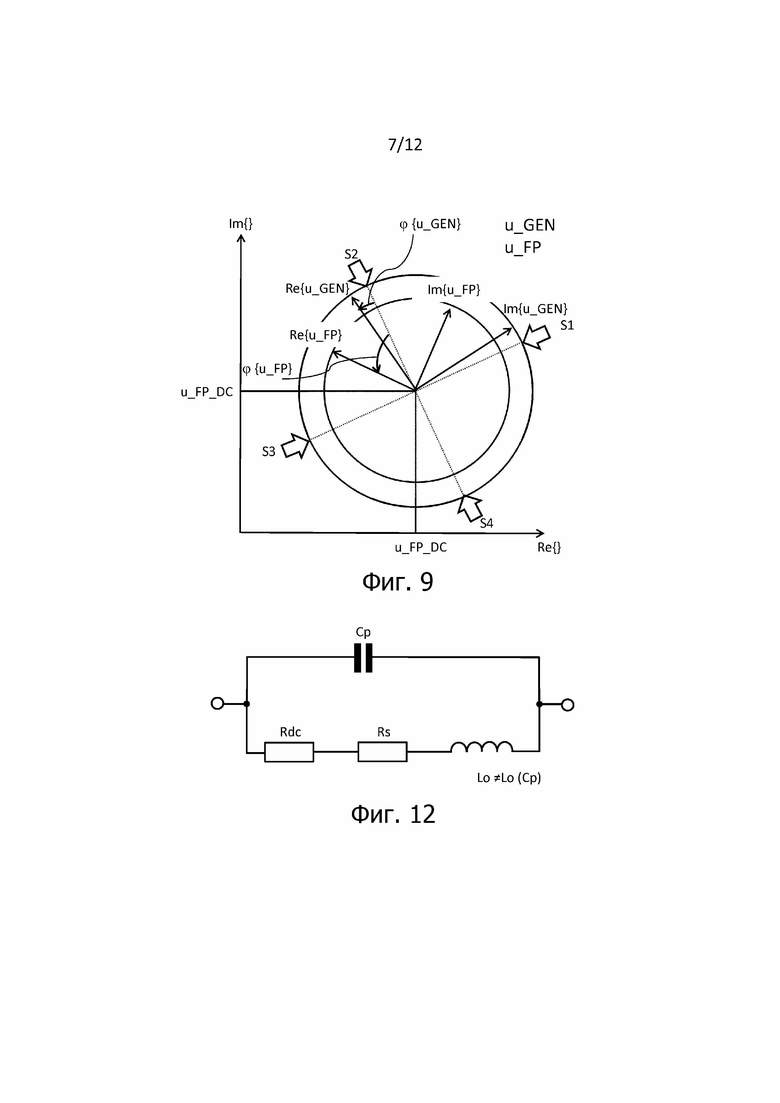
фиг. 9 - векторная диаграмма для объяснения изобретения;
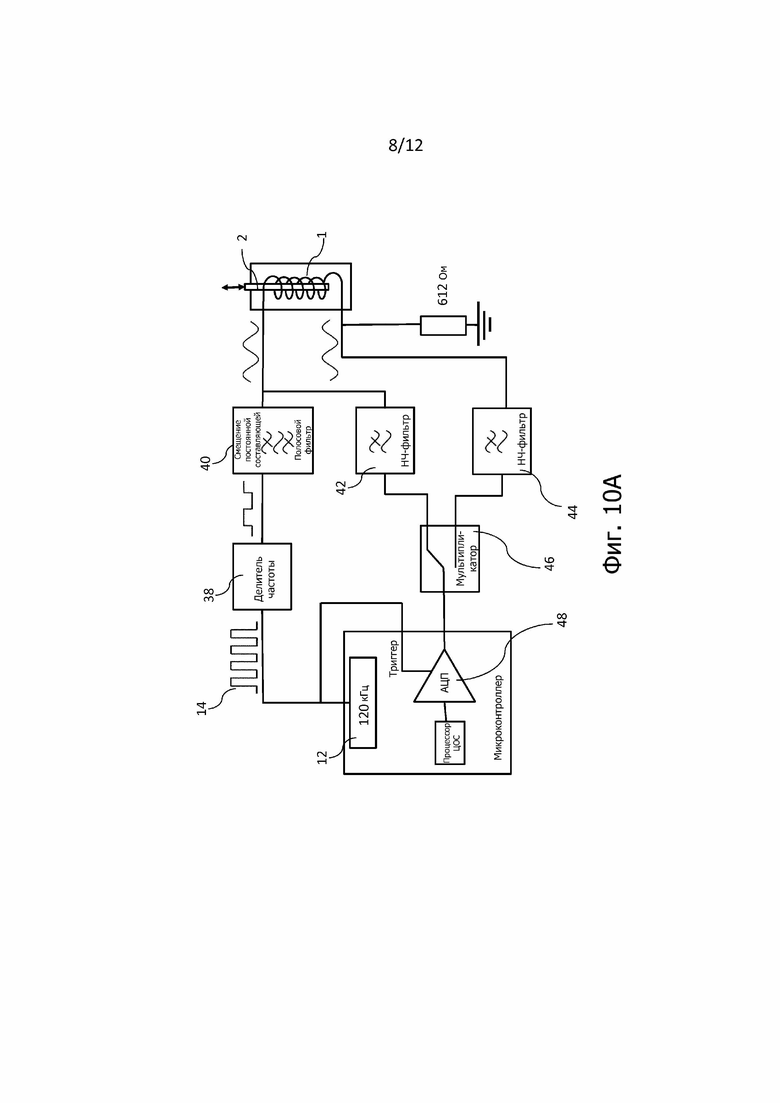
фиг. 10А - второй вариант выполнения схемы, соответствующей изобретению, с делителем частоты;
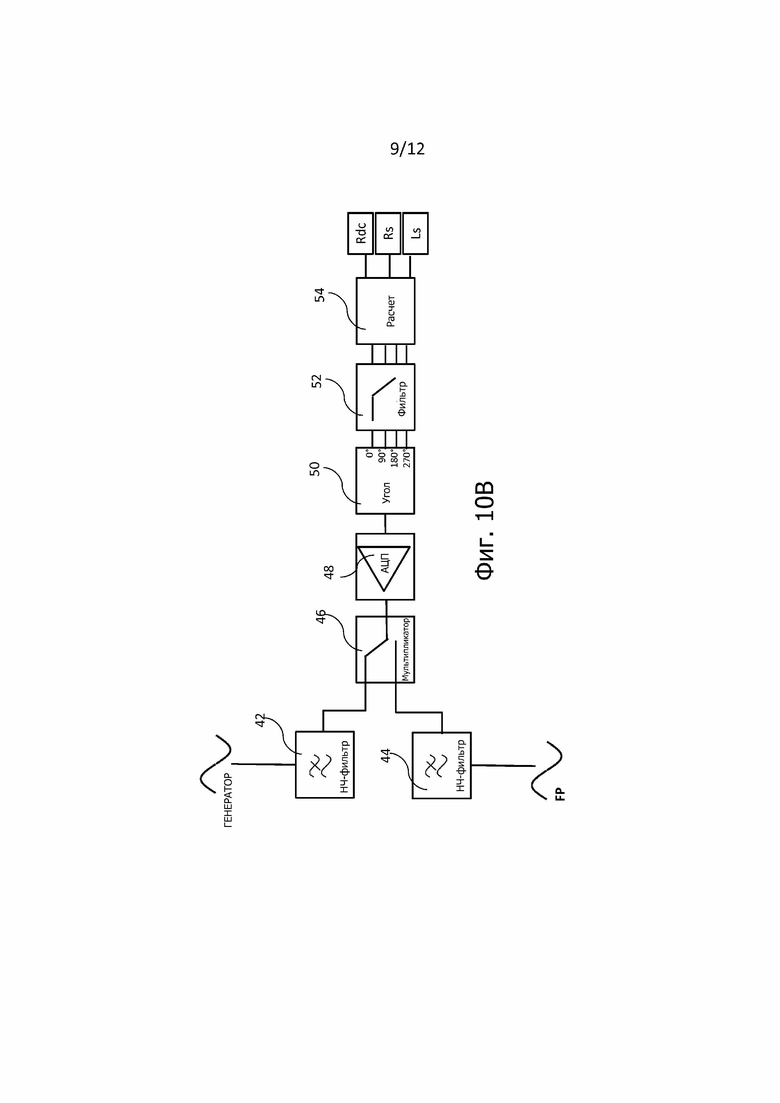
фиг. 10В – соответствующая схема оценки, показанная более подробно;
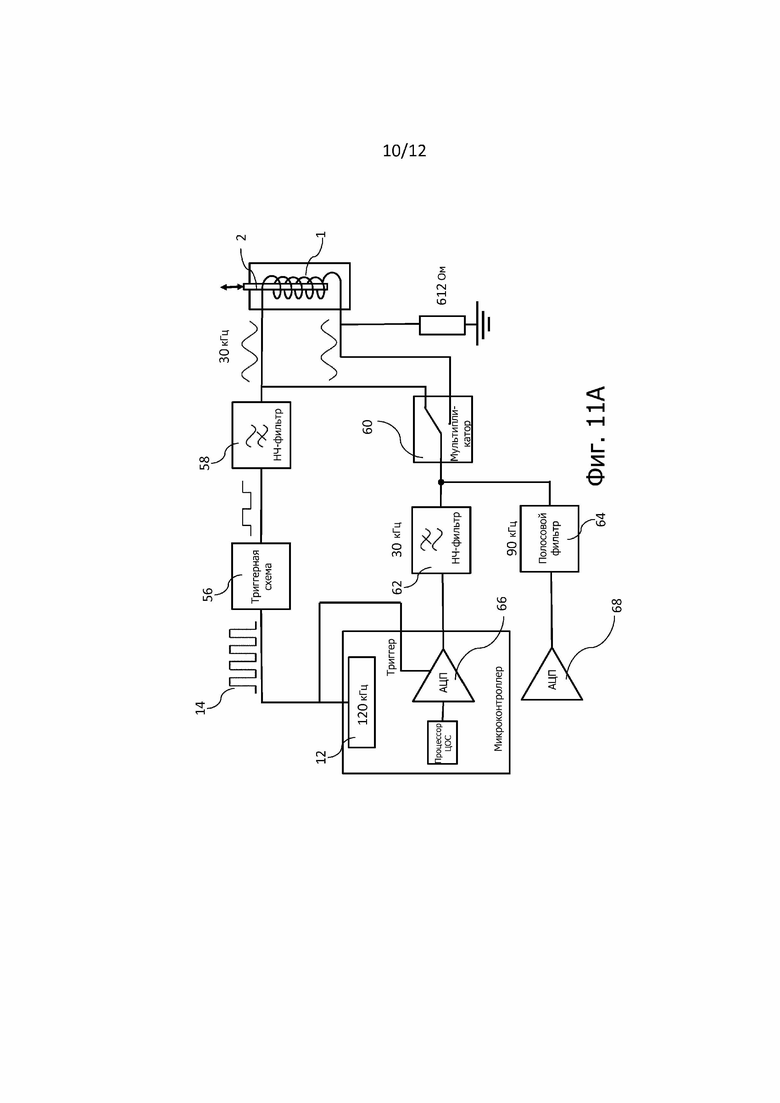
фиг. 11А - третий вариант выполнения схемы, соответствующей изобретению, с триггером;
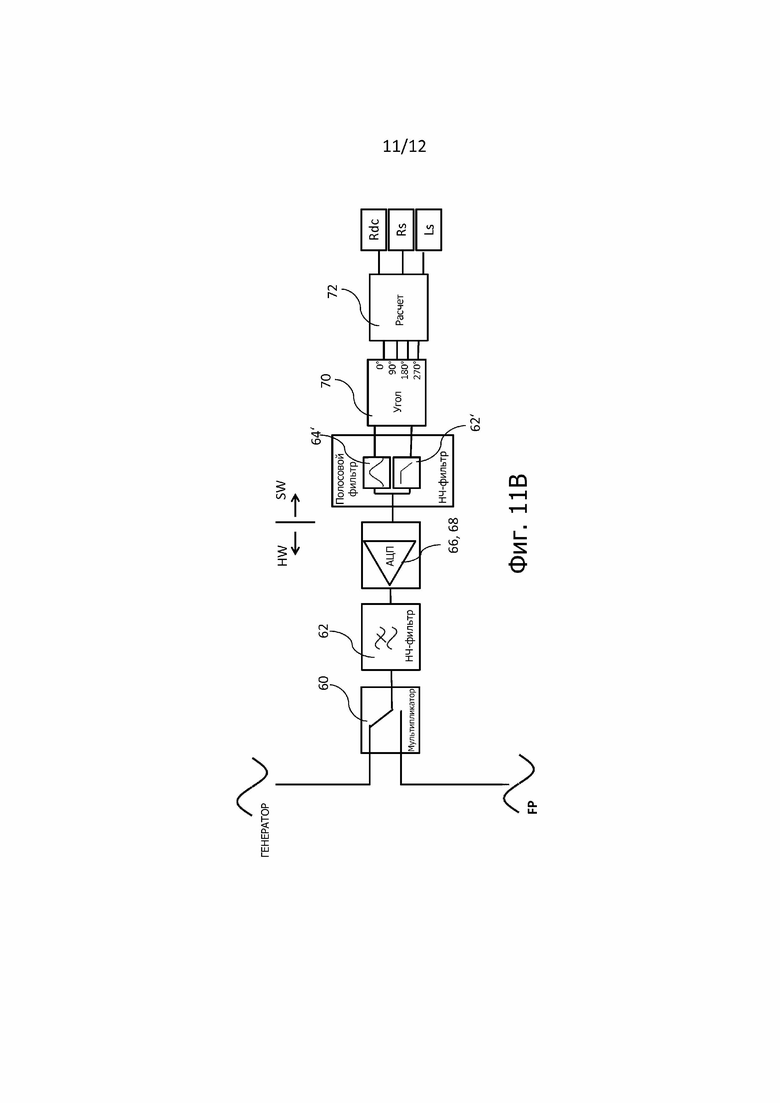
фиг. 11В – соответствующая схема оценки, подробная, с небольшой модификацией;
фиг. 12 – модифицированная эквивалентная принципиальная схема измерительной катушки по принципу, соответствующая фиг. 2 и
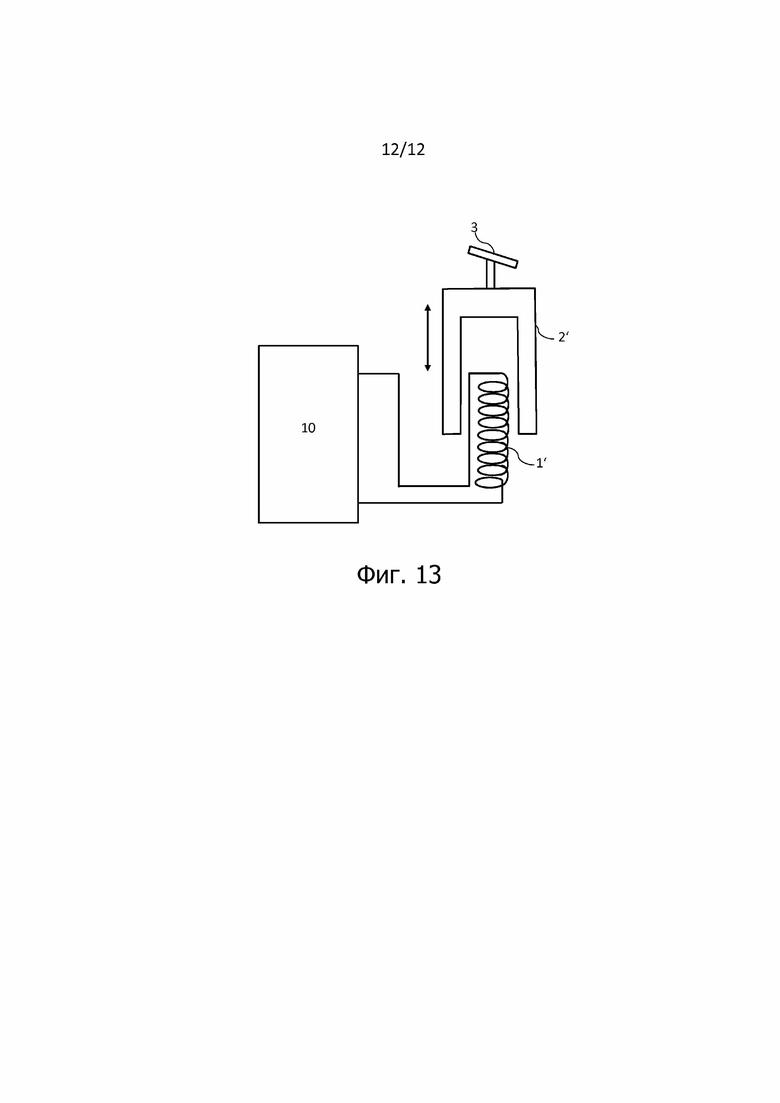
фиг. 13 – модификация принципа измерения перемещения, показанного на фиг. 1.
Варианты осуществления изобретения
Другие преимущества, отличительные особенности и признаки настоящего изобретения пояснены в нижеследующем описании примеров его осуществления, причем изобретение не ограничено этими примерами его осуществления.
На фиг. 1 показаны исполнительный элемент 2 на педали 3, проходящий сквозь катушку 1, используемые, например, в автомобиле, и устройство 10 для считывания сигнала перемещения от катушки 1.
Катушка 1, как показано на фиг. 2, смоделирована в виде схемы с параллельным соединением, во-первых, емкости Ср и, во-вторых, последовательной цепи из сопротивления Rdc постоянному напряжению, зависимого от частоты сопротивления Rs и индуктивности Ls. Значение Ls зависит от механических характеристик, в частности от перемещения, т.е. зависит от положения исполнительного элемента 2 педали 3 и, например, от температуры. Значение Rs также зависит от перемещения. К тому же оно зависит от механизма действия и межвиткового короткого замыкания. Сопротивление Rdc постоянному напряжению зависит от температуры катушки 1 и от сопротивления контактов. Емкость Ср обмотки катушки 1 зависит главным образом от влажности в катушке.
Настоящее изобретение описывает возможность отойти от обычного принципа поддержания емкости Ср на постоянном уровне путем герметизации катушки 1. Как известно, последовательное соединение индуктивности Ls и зависимого от частоты сопротивления Rs, как на схеме фиг. 3А, может быть представлено векторной диаграммой, показанной на фиг. 3В, при подаче переменного напряжения U. Результирующее напряжение имеет угол φ (фазовый угол) и абсолютную величину. Полное сопротивление рассчитывают по углу φ и абсолютной величине.
В менее идеализированной принципиальной схеме дополнительно установлен преобразователь ток/напряжение, с которого снимают напряжение U_IU, см. фиг. 4А и соответствующую векторную диаграмму на фиг. 4В. В этом случае также может быть определен фазовый угол φ, но теперь из соотношения двух напряжений u и u_IU.
Показанные на фиг. 3В и 4В векторные представления– это моментальные отображения при переменном напряжении, а в рабочем режиме вектор вращается с постоянной частотой вращения ω1 (частота переменного напряжения), так что действительную составляющую вектора можно считывать при конкретном фазовом угле, а мнимую составляющую – при другом фазовом угле, смещенном на 90°. Это видно на фиг. 5А, где при нулевом угле (измерен по длине дуги, т.е. полный оборот составляет 2π, 6,28...) можно считывать действительную составляющую, а мнимую составляющую можно считывать при угле 90° (π/2). На фиг. 5В показана соответствующая векторная диаграмма.
Изобретение основано на том, что из соответствующих измерений действительной и мнимой составляющих можно вывести полное сопротивление и фазовый угол, а из них – рассчитать параметры Rdc, Rs и Ls.
Этот вариант осуществления исходит из идеи, что измеренные значения должны считываться при 0°, 90°, 180° и 270°. Для этого на фиг. 6 показана принципиальная схема соответствующего комплекса генератора напряжения.
Генератор 12 напряжения формирует напряжение 14 в форму меандра (фиг. 7А), которое подается на низкочастотный фильтр 16, выход 18 которого выдает напряжение u_GEN генератора (кривая 20 на фиг. 7А). Перед низкочастотным фильтром на отводе Q0 снимают показанное на фиг. 7В напряжение 22 (фиг. 7В), причем за делителем 24 частоты следует выход Q1, на котором можно снять напряжение 26 (фиг. 7С). Использование значений Q0 и Q1 обеспечивает возможность производить отсчеты с углом 90°.
Полная схема показана на фиг. 8. Последовательно с катушкой 1, соединенной с к выходом 18, подключен преобразователь 28 ток/напряжение, выполненный, например, в виде простого измерительного сопротивления R_FP. За преобразователем 28 ток/напряжение следует низкочастотный фильтр или полосовой фильтр 30. Микропроцессор 32 принимает напряжения, соответствующие фиг. 7В и 7С на входах QO или и управляет подачей сигналов на аналого-цифровой преобразователь 34 (т.е. снятие отсчетов), на который также подают первоначальное напряжение 14 в форме меандра. Микропроцессор 32 включает в себя блок 36, который вычисляет значения Rs и Ls, в отдельных случаях и Rdc.
Как указано выше, напряжение необходимо считывать с углов интервалом смещения 90°. Это показано на фиг. 9 с отсчетами S1, S2, S3 и S4. Необходимо учитывать, что из-за прямоугольной формы напряжения в системе присутствует постоянная составляющая напряжения, отличная от нуля. Постоянная составляющая в напряжении генератора составляет:

И соответственно постоянная составляющая напряжения на сопротивлении R_FP преобразователя ток/напряжение составляет:

Величины u_GEN_0°, u_GEN_90°, u_GEN_180°, u_GEN_270° - это отсчеты напряжения генератора, измеренные при фазовых углах 0°, 90°, 180° и 270°. Соответственно это действительно для величин u_FP_0°, u_FP_90°, u_FP_180°, u_FP_270° напряжения на преобразователе ток/напряжение.
Значение Rdc введенного в катушку 1 сопротивления постоянному напряжению в можно вывести из этих двух величин:

С помощью Ø uGEN_DC и Ø uFP_DC теперь можно вычесть постоянную составляющую напряжения из отсчетов.
Для полного сопротивления:

Соответственно для зависимого от частоты сопротивления Rs:

Для индуктивности Ls:

Таким образом, величина Ls – это не что иное, как реактивная часть соответствующего полного сопротивления Ls = Im{Z}.
Далее более подробно описаны два варианта выполнения схемы.
На фиг. 10А показано, что сформированное генератором 12 напряжение в форме меандра, в данном примере с частотой 120 kHz, проходит делитель 38 частоты, затем оно проходит полосовой фильтр 40 со смещением постоянного напряжения и поступает на катушку 1. Входной сигнал для катушки (т.е. выход полосового фильтра) проходит низкочастотный фильтр 42, выходной сигнал катушки проходит следующий низкочастотный фильтр 44, и выходы обоих низкочастотных фильтров мультиплицируются один с другим в мультипликаторе 46, результат подается в аналого-цифровой преобразователь 48, который происходит его обработка. Как показано далее на фиг. 10В, в блоке 50 аналого-цифрового преобразователя считываются данные углов 0°, 90°, 180° и 270°, которые затем пропускают через фильтр 52 до выполнения расчета 54 по указанным выше формулам и вычисления величин Rdc, Rs и Ls.
В модификации варианта, показанного на фиг. 10А, сформированное генератором 12 напряжение 14 в форме меандра, в данном случае с частотой 120 kHz, проходит согласно фиг. 11А триггер 56, выход которого подается на низкочастотный фильтр 58, из которого выходит с частотой, например, 30 kHz. Выход низкочастотного фильтра 58 и выход катушки 1 мультиплицируют в мультипликаторе 60 и пропускают через дополнительный низкочастотный фильтр 62, а в другой ветке – через полосовой фильтр 64, к которым последовательно подключены соответствующие аналого-цифровые преобразователи 66 или 68. Эта обработка подробно показана на фиг. 11В, причем на фиг. 11В обозначениями „HW" и „SW" показано, какие блоки имеются в аппаратном виде „HW", т.е. в виде физических узлов, а какие блоки представлены в виде программного обеспечения „SW", т.е. в виде вычислительного блока. Мультипликатор 60 для сокращения времени измерения выполнен в виде двух мультиплицирующих блоков. Вместо двух аналого-цифровых преобразователей 66 и 68 можно использовать единственный аналого-цифровой преобразователь с подключенным выше дополнительным мультипликатором.
В небольшой модификации варианта, показанного на фиг. 11А, фиг. 11В иллюстрирует полосовой фильтр на более поздней стадии – см. блок 64’ с низкочастотным фильтром 62’ в параллельной ветви. Блок 70 определяет затем соответствующие величины при углах 0°, 90°, 180° и 270°, а блок 72 рассчитывает величины Rdc, Rs и Ls.
Описанный выше способ предназначен для определения характеристик катушки 1, модель которой представлена на фиг. 2, т.е. сопротивления Rdc, Rs и индуктивность Ls. Индуктивность Ls все еще зависит от Ср.
Для надежного определения перемещения, т.е. для определения положения исполнительного элемента 2, остальные величины рассчитывают по модели, соответствующей фиг. 12. В этом случае имеется индуктивность L0, не зависящая от Ср, а зависимость от Ср проявляется в других величинах.
Полное сопротивление катушки может быть представлено согласно фиг. 12 в виде:

Идея определения теоретической индуктивности L0 заключается в том, чтобы измерить индуктивность при разных частотах ω1 und ω2. При ω1 действует следующая формула для индуктивности:

при ω2 формула следующая:

Если принять приближение Rdc = Rs =0, то для реактивной части полного сопротивления Z1 и полного сопротивления Z2 действуют формулы:


Исходя из этих выражений можно рассчитать L0:

В указанных примерах видно, что при первой измеренной частоте ω1, равной, например, 25 kHz, вторая измеренная частота ω2 относится к третьей гармонике, т.е. 75 kHz, а считывание происходит при 100 kHz. Третья измеренная частота могла бы теоретически превосходить первую измеренную частоту в пять раз, т.е. быть равной 125 kHz. И в последнем случае за счет считывания при 100 kHz возникает частота 25 kHz, но тогда считанные данные необходимо использовать в соответствующей последовательности.
В этом случае высчитанная величина L0, которая может зависеть только от температуры, позволяет явно определить положение исполнительного элемента 2; с помощью Rdc можно также дополнительно компенсировать температурную зависимость. Таким образом, обеспечивается возможность использования не герметизированной катушки 1, т.е. не защищать ее от проникновения влаги.
Описанные выше измерения величин Rdc, Rs и Ls и вытекающей из этого величины L0 осуществляют в автомобиле, например, с периодичностью 5 минут, 15 минут или с иной периодичностью и с продолжительностью от 1 секунды до 24 часов, предпочтительно от 1 секунды до 1 часа. Таким образом, при активировании соответствующей педали 3, надежно учитывается соответствующее фактическое значение емкости Ср, которое зависит от возможной влажности в катушке 1.
В модификации фиг. 1 исполнительный элемент 2’ на педали 3 может также охватывать катушку 1’, причем нажатие педали 3 изменяет степень охвата катушки 1’ исполнительным элементом 2’. Таким образом, исполнительный элемент 2’ скользит по катушке 1’ снаружи.
В другой модификации, в непоказанном варианте, возможна комбинация принципов по фиг. 1 и фиг. 13, т.е. внутренняя часть исполнительного элемента может погружаться в катушку, а внешняя часть охватывает катушку и скользит по ней снаружи.
Исполнительный элемент 2 или 2’ может быть размещен не на педали 3, а на ручном манипуляторе или на каком-либо другом блоке с механическим перемещением в качестве элемента управления.
Несмотря на то, что настоящее изобретение подробно описано на примере вариантов его осуществления, оно не ограничено последними и даже возможны модификации с опусканием отдельных признаков или с другими совокупностями признаков, но без нарушения объема испрашиваемой правовой охраны, определяемого приложенной формулой изобретения. Настоящее раскрытие изобретения включает все совокупности представленных частных признаков. В частности, считывание измеренных значений возможно при 360o/n, где n – натуральное число и n > 4. Указанные уравнения могут быть заменены уравнениями, соответствующими числу n.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРОВЕРКИ ПОДЛИННОСТИ МОНЕТ, ЖЕТОНОВ И ДРУГИХ ПЛОСКИХ МЕТАЛЛИЧЕСКИХ ПРЕДМЕТОВ | 1997 |
|
RU2186422C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЭЛЕКТРИЧЕСКИХ ТОКОВ С ПОМОЩЬЮ ПРЕОБРАЗОВАТЕЛЯ ТОКА | 2012 |
|
RU2608329C2 |
| СПОСОБ ВИХРЕТОКОВОГО ИЗМЕРЕНИЯ ФИЗИКО-МЕХАНИЧЕСКИХ ПАРАМЕТРОВ | 2020 |
|
RU2747916C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2017 |
|
RU2674649C1 |
| УСТРОЙСТВО ДЛЯ ПРОВЕРКИ ПОДЛИННОСТИ МОНЕТ, ЖЕТОНОВ И ДРУГИХ ПЛОСКИХ МЕТАЛЛИЧЕСКИХ ПРЕДМЕТОВ (ВАРИАНТЫ) | 1995 |
|
RU2155381C2 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД И СПОСОБ УПРАВЛЕНИЯ ИМ | 2008 |
|
RU2477561C2 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ТОКА | 2010 |
|
RU2428701C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИЭЛЕКТРИЧЕСКИХ ПАРАМЕТРОВ ВОДЫ И ЕЕ РАСТВОРОВ В НИЗКОЧАСТОТНОЙ ОБЛАСТИ С ПОМОЩЬЮ L-ЯЧЕЙКИ | 2002 |
|
RU2234102C2 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ТОКА | 2010 |
|
RU2429493C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ГРАВИТАЦИОННЫХ ПОЛЕЙ | 1995 |
|
RU2145429C1 |
Изобретение относится к измерительной технике и предназначено для определения по меньшей мере одной характеристики измерительной катушки, например катушки, в которую погружается исполнительный элемент, например, на педали автомобиля или над которой скользит такой исполнительный элемент. Сущность: катушку моделируют в виде схемы с параллельным соединением емкости (Ср) с цепью, содержащей последовательно соединенные сопротивление (Rdc) постоянному напряжению, зависимое от частоты сопротивление (Rs) и индуктивность (Ls), а также с последовательно подключенным преобразователем (R_FP) ток/напряжение. К катушке прикладывают переменное напряжение с первой частотой и с отличной от нуля постоянной составляющей напряжения. На преобразователе (R_FP) ток/напряжение снимают напряжение со второй частотой, кратной первой частоте, причем кратность означает «n раз», где n - натуральное число, по меньшей мере кратное четырем. Выводят величину полного сопротивления при первой частоте на основе по меньшей мере n значений напряжения, измеренных последовательно с указанной второй частотой. К катушке прикладывают переменное напряжение с третьей частотой, отличной от первой частоты, и с отличной от нуля постоянной составляющей напряжения. На преобразователе (R_FP) ток/напряжение снимают напряжение с указанной второй или четвертой частотой, которая является кратной первой частоте, причем кратность означает «m раз», где m - натуральное число, по меньшей мере кратное четырем. Выводят величину полного сопротивления при третьей частоте на основе по меньшей мере m значений напряжения, измеренных последовательно с указанной четвертой частотой. На основе измеренных значений выводят величину сопротивления (Rdc) постоянному напряжению, величину зависимого от частоты сопротивления (Rs) и/или величину индуктивности (Ls). 5 н. и 12 з.п. ф-лы, 13 ил.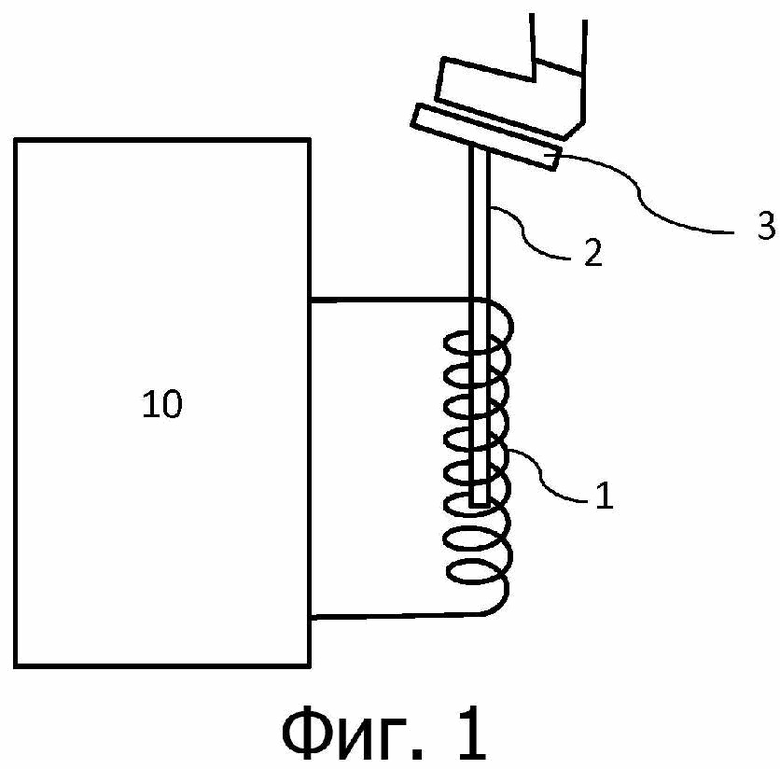
1. Способ определения по меньшей мере одной характеристики катушки индуктивности, предпочтительно измерительной катушки, используемой для определения других параметров, характеризующийся тем, что катушку моделируют в виде схемы с параллельным соединением емкости (Ср) с цепью, содержащей последовательно соединенные сопротивление (Rdc) постоянному напряжению, зависимое от частоты сопротивление (Rs) и индуктивность (Ls), а также с последовательно подключенным преобразователем (R_FP) ток/напряжение, при этом
а) к катушке прикладывают переменное напряжение с первой частотой и с отличной от нуля постоянной составляющей напряжения и на преобразователе (R_FP) ток/напряжение снимают напряжение со второй частотой, кратной первой частоте, причем кратность означает «n раз», где n - натуральное число, по меньшей мере кратное четырем, и выводят величину полного сопротивления при первой частоте на основе по меньшей мере n значений напряжения, измеренных последовательно с указанной второй частотой, и
б) к катушке прикладывают переменное напряжение с третьей частотой, отличной от первой частоты, и с отличной от нуля постоянной составляющей напряжения и на преобразователе (R_FP) ток/напряжение снимают напряжение с указанной второй или четвертой частотой, которая является кратной первой частоте, причем кратность означает «m раз», где m - натуральное число, по меньшей мере кратное четырем, и выводят величину полного сопротивления при третьей частоте на основе по меньшей мере m значений напряжения, измеренных последовательно с указанной четвертой частотой,
и на основе указанных измеренных значений выводят указанную величину сопротивления (Rdc) постоянному напряжению, величину зависимого от частоты сопротивления (Rs) и/или величину индуктивности (Ls).
2. Способ по п. 1, отличающийся тем, что на этапах а) и b) указанное переменное напряжение соответственно является синусоидальным напряжением, причем указанное напряжение отличается одно от другого в смысле частоты.
3. Способ по п. 2, отличающийся тем, что на этапе b) указанная третья частота в три раза превышает указанную первую частоту на этапе а).
4. Способ по любому из пп. 1-3, отличающийся тем, что на этапах а) и b) соответственно генерируют одинаковое напряжение в форме меандра и пропускают через разные фильтры на этапах а) и b).
5. Способ по любому из пп. 1-4, отличающийся тем, что напряжение на преобразователе (R_FP) ток/напряжение снимают синфазно с прикладываемым переменным напряжением и предпочтительно при фазе 0°, 90°, 180° и 270°.
6. Способ определения положения исполнительного элемента с использованием способа по п. 1, включающий погружение исполнительного элемента в измерительную катушку по меньшей мере в одно определяемое положение, при этом указанное положение исполнительного элемента выводят из индуктивности измерительной катушки,
отличающийся тем, что
при по меньшей мере двух различных частотах (ω1, ω2) определяют реактивную часть полного сопротивления (Z1, Z2) измерительной катушки, причем исходя из полученной величины определяют независящую от емкости (Ср) идеальную индуктивность (L0) измерительной катушки и, используя полученную идеальную индуктивность (L0), определяют указанное положение.
7. Способ по п. 6, отличающийся тем, что идеальную индуктивность (L0) вычисляют по формуле

где Im{Z1} – реактивная составляющая полного сопротивления (Z1), измеренного при первой частоте (ω1), и Im{Z2} – реактивная составляющая полного сопротивления (Z2), измеренного при второй частоте (ω2).
8. Способ по п. 6 или 7, отличающийся тем, что идеальная индуктивность (L0) зависит от температуры, при этом температуру измеряют, а измеренное значение температуры используют для определения указанного положения.
9. Способ по любому из пп. 6-8, отличающийся тем, что применяют способ по любому из пп. 1-5 и при определении указанного положения также используют указанную величину сопротивления (Rdc) постоянному напряжению и указанную величину зависимого от частоты сопротивления (Rs).
10. Устройство для определения по меньшей мере одной характеристики катушки индуктивности способом по п. 1, содержащее преобразователь ток/напряжение, предпочтительно в виде измерительного сопротивления (R_FP), которое последовательного соединено с катушкой, генератор для генерации входного переменного напряжения, которое имеет постоянную составляющую напряжения, частотный преобразователь, схему выборки для получения выходного сигнала от преобразователя ток/напряжение, причем схема выборки выполнена с возможностью выполнять выборку синфазно с входным переменным напряжением на частоте, кратной частоте входного переменного напряжения, причем указанная кратность равна по меньшей мере четырем, и блок обработки, в который подаются измеренные значения, считанные с помощью указанной схемы выборки, и который выполнен с возможностью вычислять величину сопротивления (Rdc) постоянному напряжению, величину зависимого от частоты сопротивления (Rs) и/или величину индуктивности (Ls) посредством моделирования катушки в виде схемы, представляющей собой параллельное соединение емкости (Ср) с цепью, содержащей последовательно соединенные сопротивление (Rdc) постоянному напряжению, зависимое от частоты сопротивление (Rs) и индуктивность (Ls).
11. Устройство по п. 10, отличающееся тем, что частотный преобразователь является делителем частоты, подключаемым необязательно.
12. Устройство по п. 10 или 11, отличающееся тем, что схема выборки содержит низкочастотный фильтр после выхода частотного преобразователя и низкочастотный фильтр после выхода преобразователя ток/напряжение, причем выходы обоих низкочастотных фильтров соединены с входами мультипликатора, выход которого соединен с входом аналого-цифрового преобразователя, выход которого соединен с микропроцессором, являющимся блоком обработки данных.
13. Устройство по п. 10 или 11, отличающееся тем, что схема выборки направляет выходной сигнал частотного преобразователя и преобразователя ток/напряжение в мультипликатор, выходной сигнал которого проходит низкочастотный фильтр, выход которого подается на вход аналого-цифрового преобразователя, выход которого подается на микропроцессор, который является блоком обработки данных, причем выходной сигнал мультипликатора подается также на полосовой фильтр, выходной сигнал которого подается на указанный первый аналого-цифровой преобразователь или на второй аналого-цифровой преобразователь, выходной сигнал которого подается в микропроцессор.
14. Устройство для определения положения исполнительного элемента (2, 2’) способом по п. 6, причем устройство включает в себя измерительную катушку (1, 1'), в которую по меньшей мере частично исполнительный элемент (2, 2') погружается по меньшей мере в одно определяемое положение и/или над которой исполнительный элемент (2, 2') по меньшей мере частично скользит по меньшей мере в одном определяемом положении, и устройство для определения полного сопротивления измерительной катушки (1, 1') или по меньшей мере реактивной составляющей полного сопротивления (Im{Z1}, Im{Z2}) измерительной катушки (1, 1') при двух разных частотах (ω1, ω2) для определения идеальной индуктивности (L0) катушки, причем идеальная индуктивность (L0) катушки не зависит от емкости (Ср) измерительной катушки (1, 1') и исходя из идеальной индуктивности (L0) катушки можно вывести указанное положение исполнительного элемента (2, 2'), и
устройство для вычисления указанного положения исполнительного элемента (2, 2') из идеальной индуктивности (L0).
15. Устройство по п. 14, отличающееся тем, что устройством для измерения полного сопротивления измерительной катушки (1, 1') является устройство по любому из пп. 10-13.
16. Автомобиль с исполнительным органом, содержащим исполнительный элемент (2, 2'), и с устройством для определения положения исполнительного элемента (2, 2') по п. 14 или 15, отличающийся тем, что
для определения положения исполнительного элемента (2, 2') по меньшей мере частично исполнительный элемент (2, 2') погружается в измерительную катушку (1, 1’) указанного устройства и/или по меньшей мере частично скользит над исполнительной катушкой (1, 1’) указанного устройства и вызывается реакция автомобиля на основе указанного положения исполнительного элемента (2, 2') по меньшей мере при заданных условиях.
17. Автомобиль по п. 16, отличающийся тем, что исполнительным органом является педаль (3) тормоза, педаль газа, педаль сцепления или орган ручной активации.
| US 4103233, 25.07.1978 | |||
| DE 102010036126 B3, 02.02.2012 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВВЕДЕНИЯ УГЛЯ И РЕЦИРКУЛЯЦИИ СИНТЕЗ-ГАЗА ПРИ ПРОИЗВОДСТВЕ СИНТЕЗ-ГАЗА | 2011 |
|
RU2565695C2 |
| WO 1993011369 A1, 10.06.1993 | |||
| US 4649341, 10.03.1987 | |||
| ИНДУКТИВНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2011 |
|
RU2474786C1 |
| Цифровой измеритель емкости и индуктивности | 1973 |
|
SU659993A1 |

