Изобретение относится к области динамических испытаний и может быть использовано при испытаниях механических конструкций различного назначения и электронного оборудования на динамические механические и электронные воздействия.
Различные способы испытаний крупномасштабных конструкций (самолетов, зданий и т.д.), обычных конструкций, а также электронных и механических систем на динамические воздействия широко известны и изложены, в том числе в следующих работах:
1. Испытательная техника. Справочник в 2-х т. / Под ред. Клюева В.В., т. 2. М.: Машиностроение, 1982, стр. 8, 287-289, 334-337, 422-425.
2. Р.Л. Бисплингхофф и др. Аэроупругость. М.: Изд. иностр. лит., 1958, с. 675.
3. Глудкин О.П., Черняев В.Н. Технология испытания микроэлементов радиоэлектронной аппаратуры и интегральных микросхем. М: Энергия. 1980, стр. 179.
4. Назин В.В. "Новейшие сейсмостойкие конструкции и железобетонные механизмы сейсмоизоляции зданий и сооружений" - М.: Стройиздат, 1993, с. 95-96, рис. 23).
Известные способы испытаний направлены на поиск и реализацию разнообразных воздействий на объект испытаний, включающих в себя возбуждение колебаний в испытуемой конструкции на одной или нескольких собственных (резонансных) частотах, воздействие вибрационными, ударными и гармоническими нагрузками, широкополосной вибрацией и поиску на объекте точек установки измерительной аппаратуры. При этом в ряде случаев предварительно проводится получение и исследование амплитудно-частотной характеристики объекта с целью определения его собственных (резонансных) частот.
Из уровня техники известны технические решения, направленные на реализацию задачи динамических испытаний конструкций и систем.
В патенте RU 2011174 «Способ динамических испытаний зданий и сооружений» предлагается возбуждение колебаний испытуемого объекта на собственных частотах воздействием на него последовательности ударных импульсов, которые создаются реактивной силой, по крайней мере, одного устанавливаемого на конструкции импульсного возбудителя, а измерение возбуждаемых колебаний производится с помощью установленных на испытуемом объекте датчиков.
К недостаткам данного способа испытаний следует отнести то, что используемое в процессе испытаний воздействие, включающее только собственные (резонансные) частоты объекта, не отражают полностью все особенности его амплитудно-частотной характеристики, а следовательно, не являются в полной степени адекватным.
В патенте RU 2104508 «Способ динамических испытаний крупномасштабных конструкций» утверждается, что в указанном предыдущем патенте RU 2011174 способе испытаний, практически невозможно получить точно параметры собственного тона колебаний исследуемой конструкции. С высокой степенью вероятности можно пропустить собственный тон колебаний по той причине, что частоты конструкции ниже частоты возбуждения практически не возбуждаются, и поэтому практически невозможно таким способом определить точно фактические значения периодов собственных колебаний объекта.
Величина усилия воздействия в каждом месте приложения задается независимо от формы возбуждаемого тона собственных колебаний вследствие нестационарного испытательного воздействия, искажающего колебания испытуемой конструкции на собственной частоте.
Поэтому основной технической задачей, решаемой в патенте RU 2104508 «Способ динамических испытаний крупномасштабных конструкций», является точное выделение собственного тона колебаний испытуемой конструкции путем воздействия последовательностью ударных импульсов в точках расположения пучностей колебаний; возбуждаемого тона и автоматического поддержания условий фазового резонанса при постоянном уровне колебаний.
К недостаткам данного способа испытаний следует отнести то, что, улучшая характер испытательного воздействия на объект, этот способ не решает задачу адекватности этого воздействия характеристикам объекта. Этот недостаток аналогичен недостатку предыдущего способа динамических испытаний зданий и сооружений.
В патенте РФ №2141635 «Способ динамических испытаний зданий и сооружений и устройство для его осуществления» возбуждение колебаний испытуемого объекта осуществляется так же, как и в предыдущих способах, на собственных частотах. Возбуждение колебаний объекта реализуется воздействием на него последовательностью ударных импульсов, а отклики объекта на эти импульсы суммируют по амплитуде. Динамические характеристики испытуемого объекта определяют по измеренным параметрам суммарных колебаний. Отличие от предыдущих способов состоит лишь в методике измерений динамических характеристик объекта. Поэтому все отмеченные выше недостатки также относятся к этому способу.
Патент RU 2399032 «Способ испытаний оборудования на механические. воздействия», является наиболее близким к заявляемому способу по технической сущности.
Этот способ заключается в нагружении испытуемого объекта заданными случайными широкополосными вибрационными и ударными и гармоническими нагрузками. Вибрационные испытания проводят по методу качающейся частоты, когда частоту вибрации плавно изменяют в заданном диапазоне частот от нижней границы частоты к верхней и обратно при постоянстве заданных параметров вибрации в течение определенного времени, или испытания по методу случайной широкополосной вибрации, когда одновременно возбуждают все резонансные частоты объекта. За критерий подобия. реальному процессу принята спектральная плотность мощности виброускорений. Ударные испытания проводят по методу ударных спектров ускорений, когда не важен вид воздействия, а важна реакция на это воздействие. При этом динамические испытания проводят в комбинированном режиме. Во-первых, определяют резонансные частоты объекта испытаний во всем нормируемом частотном диапазоне и устанавливают частотные диапазоны, в которых проводят замену случайной широкополосной вибрации эквивалентной ей гармонической вибрацией и в процессе испытаний проводят соответствующие измерения. Сравнение полученных значений динамических деформаций и перемещений с нормативными значениями позволяет проверить условия эксплуатации.
Этот способ отличается от предыдущих тем, что авторы его расширяют частотный диапазон спектра воздействия, что является безусловным достоинством данного способа испытаний. Однако следует указать и на его недостатки.
Недостатком этого способа испытаний является то, что одна или несколько собственных и резонансных частот, на которых проводятся испытания, не отражают всех особенностей амплитудно-частотной характеристики конструкции или системы как объекта испытаний. Даже при охвате всего диапазона частот амплитудно-частотной>; характеристики объекта вышеуказанным испытательным сигналом случайной широкополосной вибрации не достигается полного согласования комплексного спектра испытательного сигнала с параметрами комплексного коэффициента передачи конструкции. Это происходит вследствие того, что поскольку широкополосные вибрационные и ударные нагрузки, используемые в известном способе-прототипе испытаний представляют собой случайные процессы, то как амплитуды, так и фазы составляющих спектра воздействия никак не коррелированны с соответствующими как амплитудами, так и фазами составляющих амплитудно-частотной характеристики испытуемого объекта.
Причины указанного несоответствия можно конкретизировать так:
1. Если существуют соотношения в интенсивности между частотными составляющими амплитудно-частотной характеристики объекта, требующие согласованных соотношений от частотных составляющих спектра воздействия для получения максимального результата, то случайный характер интенсивности частотных составляющих спектра воздействия не будет соответствовать этим требованиям вообще и если будет, то с весьма малой долей вероятности, определяемой самой случайностью испытательного процесса.
2. Если существуют фазовые соотношения между частотными составляющими фазочастотной характеристики объекта, требующие согласованных с ними фазовых соотношений между частотными составляющими спектра воздействия для получения максимального результата, то случайный характер фазовых соотношений между частотными составляющими спектра воздействия не будет соответствовать этим требованиям вообще и если будет, то с весьма малой долей вероятности, определяемой самой случайностью этого процесса.
Вследствие этих причин несогласованности параметров воздействия с параметрами объекта испытаний все испытательные сигналы рассмотренных выше способов-аналогов не могут обеспечить максимально возможный отклик объекта, который мог бы обнаружить в процессе испытаний наиболее опасные отклонения параметров конструкции. Эти отклонения параметров могут быть выявлены только при согласовании упомянутых выше параметров испытательного сигнала с параметрами объекта испытаний.
Представленное в перечисленных выше аналогах многообразие способов испытаний конструкций с помощью различных испытательных сигналов, свидетельствует о стремлении авторов найти наиболее эффективный способ воздействия на конструкцию или систему с целью получения такого результата испытаний, который должен дать наилучший ответ на вопрос о состоянии объекта с точки зрения его надежности в процессе эксплуатации. При этом во всех способах воздействия на объект варьируется характер сигналов, затрагивающих в различной степени частотный диапазон его АЧХ.
При этом не решается задача создания критерия, в соответствии с которым может формироваться входной испытательный сигнал, обеспечивающий решение поставленной. задачи получения максимально возможного отклика или реакции объекта или системы.
Патент RU 2569636 «Способ динамических испытаний конструкций и систем на механические и электронные воздействия», является наиболее близким к заявляемому способу по технической сущности, что позволяет использовать его в качестве прототипа. В этом способе в точке приложения испытательного воздействия соотношения в интенсивности между частотными составляющими спектра воздействия и их фазовыми соотношениями для получения максимального результата при приложении воздействия в любой одной точке системы согласуются с частотными составляющими амплитудно-частотной характеристики объекта и их фазовыми соотношениями.
К недостатку этого способа-прототипа относится отличие характера испытательного воздействия и его локализации, т.е. места приложения испытательного воздействия на объекте испытаний, конструкции или системе, от характера реального воздействия и его реальной локализации на реальном объекте, находящемуся в реальных условиях эксплуатации. Смысл этих недостатков состоит в следующем. Реальные нагрузки на конструкцию, т.е. объект испытаний, прикладываются ко всей или некоторой части его поверхности, т.е. к совокупности точек объекта, обладающего распределенными параметрами. При этом реакция на эти реальные нагрузки в любой точке конструкции есть результат внешнего воздействия нагрузки не на одну, как предложено в способе-прототипе, а одновременно на целый ряд ее точек. Поэтому выполнение условий согласования параметров объекта испытаний и параметров испытательного воздействия в одной точке, достигнутые в способе - прототипе, являются условиями недостаточными.
Достаточность этих условий является объектом исследований и доказательств в предлагаемом способе испытаний.
В предлагаемом способе испытаний в отличие от способа - прототипа формируется групповой сигнал как совокупность различных испытательных сигналов, воздействующих не на одну, а на n точек объекта испытаний.
При этом каждый из сигналов в группе n сигналов формируется путем обработки сигнала-реакции объекта на свой ударный импульс в точке наблюдения.
При одновременном групповом воздействии испытательных сигналов в n точках реакция объекта в точке наблюдения будет результатом воздействия не одного, а группы сигналов, каждый из которых согласован по своим свойствам с реакцией объекта в точке наблюдения на свой ударный импульс.
Такой групповой сигнал является уникальным в том смысле, что при той же мощности воздействия, создает в точке наблюдения самую максимальную реакцию по сравнению с комбинацией любых других сигналов, воздействующих на те же точки.
Таким образом, достаточность условий согласования испытательного воздействия и объекта испытаний состоит и в характере согласованных с объектом испытательных сигналов, и в их локализации по отношению к объекту испытаний, которые будучи наиболее близки к характеру и локализации реальных воздействий нагрузки на объект, обеспечивают по сравнению с другими видами испытательных воздействий, обладающими той локализацией, максимальную реакцию объекта.
Это позволит обеспечить возможность обнаружения в процессе испытаний таких опасные отклонений параметров конструкции, которые не могут быть обнаружены известными способами испытаний.
Технический результат заключается в получении многоточечного способа формирования группового испытательного сигнала, при котором локализация испытательного воздействия, действующего одновременно в n точках, достаточно близка к реальному пространственному распределению нагрузок на объект, а характер этого испытательного воздействия согласован с характеристиками объекта испытаний таким образом, что при испытаниях обеспечивается достижение максимальной величины отклика объекта испытаний по сравнению с реакцией объекта на комбинацию любых других n одновременно действующих точечных воздействий той же мощности и в тех же точках объекта испытаний, что обеспечивает возможность обнаружения опасных отклонений параметров объекта испытаний.
Технический результат достигается тем, что в способе динамических испытаний конструкций и систем на механические и электронные воздействия, заключающемся в нагружении испытуемой конструкции путем воздействия последовательностью ударных импульсов и получении сигналов-откликов в любой точке, где формируют их цифровые отсчеты с помощью аналого-цифрового преобразователя, ограничивают во времени последовательность этих отсчетов, формируют с помощью инвертора зеркальную последовательность этих отсчетов, формируют из последовательности упомянутых отсчетов с помощью цифро-аналогового преобразователя одиночный аналоговый испытательный сигнал, подаваемый на первый вход сумматора, с выхода которого сигнал поступает на вход линии задержки, в которой задерживается на время, равное удвоенной длительности сигнала, и поступает на вход сумматора, к которому подключен выход линии задержки, а с выхода сумматора, соединенного с входом усилителя мощности, сигнал поступает на вход усилителя мощности, с выхода которого снимается периодическая последовательность испытательных импульсов необходимой мощности, которые подают на исполнительный механизм, воздействующий на конструкцию, как объект динамических испытаний, в точке его нагружения вышеупомянутой последовательностью ударных импульсов, а измерение результата испытаний производят в точке фиксирования сигнала-отклика системы или конструкции, заданной последовательностью n ударных импульсов, следующих с интервалом Т, воздействуют поочередно на n точек конструкции, преобразуют создаваемые n механических колебаний в точке наблюдения конструкции в n электрических сигналов, из которых формируют с помощью аналого-цифрового преобразователя последовательность n групп цифровых отсчетов сигналов-откликов на каждый ударный импульс, ограничивают длительность каждой группы последовательности цифровых отсчетов интервалом Т, формируют зеркальные отображения двоичных символов в каждой группе цифровых отсчетов сигналов-откликов, и эту последовательность групп цифровых отсчетов подают на вход введенного и управляемого тактовыми импульсами с интервалом Т коммутатора, имеющего один вход и n выходов, с помощью которого распределяют подаваемую на вход введенного коммутатора последовательность групп цифровых отсчетов испытательных сигналов на n выходов этого коммутатора, соединенных со своими, соответствующими n сумматорами, на первые входы которых поступают последовательно группы цифровых отсчетов испытательных сигналов с соответствующих выходов коммутатора, а с выходов упомянутых n сумматоров эти сигналы поступают на входы соответствующих n линий задержки, в каждой из которых каждая цифровая группа сигналов задерживается на время, равное nT, т.е. произведению длительности каждой цифровой группы сигналов на количество упомянутых ударных импульсов n, а с выходов упомянутых линий задержки цифровые группы сигналов поступают на вторые входы своих n сумматоров, к выходам которых подключены n входов выравнивающих линий задержки с номерами входов k, где 1≤k≤n, причем, каждая из n выравнивающих линий задержки задерживает свой сигнал на время, равное (n-k)Т, и в результате этих задержек все n цифровых групп сигналов, поступающих на входы соответствующих выравнивающих линий задержки, и снимаемых с n выходов этих выравнивающих линий задержки, начинают действовать одновременно, а выходы n выравнивающих линий задержки соединены с n входами цифро-аналоговых преобразователей, которые из одновременно действующих зеркальных n цифровых групп испытательных сигналов формируют соответствующие n аналоговых испытательных сигналов, поступающих на входы соответствующих n усилителей мощности, с выходов которых снимаются периодически повторяющиеся последовательности n одновременно действующих усиленных групп испытательных сигналов соответствующей формы, которые подаются на n исполнительных механизмов, воздействующих одновременно на конструкцию, как объект динамических испытаний, в n точках его первоначального нагружения упомянутыми n ударными импульсами, а измерение результата испытаний производят в точке наблюдения сигнала-отклика системы или конструкции на групповые воздействия испытательного сигнала в n точках.
На основании доказательства существования способа получения одновременно действующих на n точек объекта таких n испытательных сигналов, которые обеспечивают обнаружение его опасных состояний за счет получения максимально возможной реакции объекта испытаний в точке наблюдения по сравнению с результатом действия в тех же точках любой другой комбинации сигналов.
Рассмотрим динамическую систему как систему с n входами и одним выходом. На ее n входов подаются одновременно внешние воздействия определенной формы, а на выходе возникает ответная реакция. При таком подходе, основная задача - это поиск некоторой комбинации испытательных воздействий, обеспечивающих экстремальное реакцию системы на ее выходе, т.е. в определенном смысле - резонанс.
При этом резонанс рассматривается как свойство системы с внешним описанием. Это свойство альтернативно традиционному резонансу системы с внутренним описанием.
Введем обобщение, состоящее в том, что на входах такой резонансной системы могут действовать ряд сигналов со сложными формами.
Результатом наших исследований будет доказательство того факта, что в зависимости от формы этих сигналов только при определенном их сочетании на входе системы на ее выходе может появиться экстремальный сигнал, пиковое значение которого может существенно превышать значения выходного сигнала при любой другой комбинации сигналах нал входах.
Практическая ценность такой задачи состоит в том, что на реальные системы действуют пространственно распределенные воздействия, которые могут быть с достаточной степенью приближения описаны конечным набором n воздействий на выделенные n точек системы. При действии на эти точки определенного сочетания внешних воздействий в системе может, как реакция системы, возникать резонанс, которого не ждут и который может привести к непредсказуемым последствиям. При этом иные сочетания автономных воздействий внешних сил на n входов системы подобного экстремального отклика на выходе системы не вызывают. При традиционном обследовании таких систем частотным методом резонансы в них не обнаруживаются. К таким системам могут относиться мостовые конструкции, отрезки железнодорожных путей с движущимися по ним составам и другие системы с ограниченной базой, находящиеся под воздействием внешних сил в разных точках.
Поэтому, при вариации видов и параметров входных сигналов необходимо, установить в ней явление резонанса и предупредить нежелательные его последствия. Такой вид резонанса, конечно, будет резонансом формы, и мы определим его как матричный резонанс формы. При этом необходимо показать, что в случае векторной совокупности входных сигналов при определенной их параметризации на выходе системы может иметь место экстремальный отклик, величина которого в некоторый момент времени больше, чем для любой иной комбинации входных сигналов.
Рассмотрим явление резонанса в линейной стационарной динамической системе с постоянными параметрами, в которой имеется n входов и один выход. Пусть сигнал имеет n-мерное пространство состояний и вектор пространства состояний в момент t:

Тогда модель n×1 системы в матричном виде может быть представлена уравнениями:
Здесь А - n×n матрица переходов состояния, удовлетворяющих условиям устойчивости, В - матрица входов
 С=[c1, c2, … Cn] - матрица выхода.
С=[c1, c2, … Cn] - матрица выхода.
Положим для упрощения D=[d1, d2, … dn]=[0, 0, … 0],
что соответствует случаю отсутствия прямого прохождения сигнала с входа на выход.
Известно, что (2) имеет решение в плоскости комплексной переменной:
 где
где 
при нулевых начальных условиях.

I - единичная матрица.
Для выхода будем иметь:

Матрица размера - (1×n) с коэффициентами, зависящими от р (комплексной переменной) С(pI-А)-1⋅В=K(р) - имеет смысл матричной передаточной функции вида:

Реакция системы будет иметь вид:
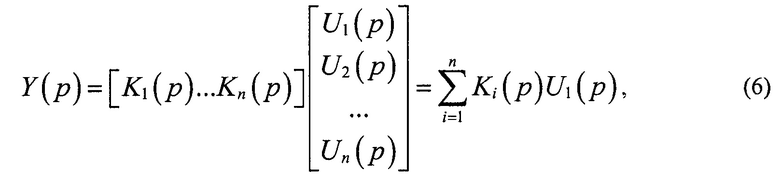
где Ki(p) - передаточная функция с i входа на выход.
Ki(p) - представляют собой дробно-рациональные функции многочленов, стоящих в числителе и знаменателе и зависящих от коэффициентов матриц:
А, В и С. Полюса Ki(p) определяются соответствующими числами матрицы А. Если обозначить соответствующие оригиналы передаточной функции как:
то можно считать, что этот набор функций определяет матричную импульсную, характеристику системы (7), т.е.

Функции hn(t)i назовем импульсными характеристиками по i-входу.
Выражение (6) можно интерпретировать как декомпозицию произвольной линейной системы с постоянными параметрами, описываемую обыкновенными дифференциальными уравнениями и имеющую n - входов и один выход.
Такая система может быть представлена блок-схемой матричного резонатора общего вида (фиг. 1).
Можно обобщить эту модель на все линейные стационарные системы, в том числе описываемые не только обыкновенными дифференциальными уравнениями, поскольку для всех них также можно представить связь n входов и одного выхода через парциальные передаточные функции, образующие матричную импульсную характеристику (7). Только в этом случае Ki(p) не будут дробно - рациональными функциями переменной р.
Покажем, что когда на входах системы действуют сигналы u1(t)u2(t)…un(t), которые связаны с парциальными импульсными характеристиками соотношением:

то на выходе будет иметь место экстремальный отклик, т.е. будет иметь место матричный резонанс формы.
Сначала рассмотрим выражение (8) в частотной области. Для этого применим преобразование Лапласа и учтем зеркальность по времени этой функции в правой части. При вычислении получим следующее выражение через матричную передаточную функцию системы;

Это решение может рассматриваться и как решение вариационной задачи на множестве всех функций входных сигналов при фиксированной энергии каждого из них. При этом вариация должна осуществляться как формой каждого сигнала, так и числом ненулевых сигналов, добиваясь уникального сочетания сигналов на n входах, обеспечивающего появление непредсказуемого резонансного значения сигнала на выходе системы. Выражение для сигнала на выходе системы при этом будет иметь вид:
или 
где u1(t)u2(t)…un(t) - входные сигналы, а hk(t) - импульсные характеристики. Приведенное решение для многих систем может дать в качестве сигнала физически нереализуемую функцию (например, монотонно возрастающую до бесконечности). Далее мы приведем особенности решения с учетом требования финитности во времени находимого решения.
Известно, что каждый из возможных входных сигналов при t≤0 ui(t)=0. При образовании импульсной характеристики из такого сигнала с помощью его «зеркального» отображения и сдвига на величину Т эта характеристика hi(t)=0 при t≥T. Эта оговорка не может заменить строго математического представления импульсной характеристики на временном интервале в бесконечных пределах. Такое представление может быть сделано с помощью «окна» вида [1(t)-1(t-T)], умноженного на функцию входного сигнала, т.е
u1(t)⋅[1(t)-1(t-T)]
Тогда в общем случае:
1. Функция сигнала и его изображение будут иметь вид:

где K*(p) - изображение сопряженного комплекса передаточной функции системы, которая имеет вид:

2. Функция «окна» и его изображение:

3. Изображение произведения функций входного сигнала и «окна» с использованием вычетов в полюсах будет иметь вид:
где 

Корни знаменателя: z1=-α1, z2=-α2, … zn=-αn, zn+1=р.
Итак, для системы с заданной передаточной функцией изображение Лапласа для финитной функции входного сигнала в общем случае будет иметь вид:

При этом будет выполняться 
Покажем теперь, что найденное решение для сигнала, названного резонансным, имеет экстремальное свойство. Для любой парциальной системы, т.е. для каждого входа можно записать:

где  - взаимнокорреляционная функция входного сигнала ui(t) и импульсной характеристики любого канала системы, характеризующей их взаимную энергию, а k≥1 это коэффициент пропорциональности.
- взаимнокорреляционная функция входного сигнала ui(t) и импульсной характеристики любого канала системы, характеризующей их взаимную энергию, а k≥1 это коэффициент пропорциональности.
Этот коэффициент пропорциональности является фиксированной величиной для; линейной системы и связан с определением импульсной характеристики, размерность которой 1/сек. Когда мы говорим, что подаем на вход сигнал, равный зеркальной импульсной характеристике, то имеем в виду, что совпадают формы, а равенство существует с некоторым коэффициентом размерности (сек). Физический смысл этого, коэффициента обычно связывают с временем интегрирования в системе, те с длительностью импульсной характеристики. Этот коэффициент будет присутствовать и в равенствах содержащих ВКФ и АКФ взаимнокорреляционной функции и автокорреляционной функции).
Из выражения (18) нетрудно видеть, что максимальное значение сигнала на выходе линейной системы с одним входом и одним выходом при резонансе формы будет:

т.е. в том случае, когда сигнал описывается функцией, являющейся зеркальной во времени функции импульсной характеристики парциального канала. Тогда каждый парциальный выходной сигнал воспроизводит во времени сдвинутую АКФ входного сигнала, причем так, что максимум на выходе достигается в момент Т По определению АКФ сигнала конечной длительности имеет размерность энергии в точке Т и равна энергии сигнала. Это определяет максимально возможное пиковое значение на выходе парциального канала.
Если n входных сигналов окажутся такими, что для каждого парциального канала будут выполнены условия (19) для одного и того же момента времени Т то, на выходе образуется сигнал с пиковым значением, которое будет существенно превышать значения выходного сигнала по сравнению с любыми другими сигналами на тех же n входах системы. Этому условию соответствует выражение:

Очевидно, что большего пикового значения, чем указанное в выражении (20) на выходе данной линейной системы при фиксированной энергии входных сигналов получить невозможно.
Приведенные теоретические доказательства и заключение были проверены экспериментально методом моделирования матричного резонанса на диффузной линии как системы с распределенными параметрами.
Диффузные линии для различных систем и конструкций имеют различную физическую природу, а физические процессы, протекающие в упомянутых системах, описываются уравнениями диффузии, представляющими собой дифференциального уравнения в частных производных нестационарного и стационарного типа. Эти уравнения представляют собой частные случаи уравнений математической физики. К ним относится уравнение, описывающее распространение тепла в однородном стержне. Это уравнение имеет вид:

при начальных условиях: Q(x,0)=Q0(x) и -∞≤x≤∞,

Здесь Q(x, t) - температура, x - расстояние от одного из концов однородного стержня, по которому распространяется тепловой поток, t - время, а - положительная константа, являющаяся аналогом коэффициента затухания, определяющая скорость распространения тепла.
Совершенно очевидно, что уравнение (21) описывает систему с распределенными параметрами.
Постановка задачи
1. Необходимо определить для нескольких входов системы вид одновременно действующих сигналов, вызывающих экстремальную реакцию на выходе системы.
2. В качестве импульсной характеристики, соответствующей уравнению системы используется функция Грина, поскольку соответствующий ей сигнал вызовет в определенный момент времени максимальную реакцию на выбранном выходе системы.
3. Необходимо зафиксировать координату выхода системы и, выбрав произвольно координаты ряда входных точек системы, определить для каждой из них функцию Грина по отношению к выходу системы.
4. Необходимо сформировать для всех выбранных входов соответствующие зеркально-смещенные сигналы и подать их на соответствующие входы системы.
5. Определить результирующий сигнал, т.е. отклик системы с помощью операции свертки зеркально-смещенных сигналов с соответствующими импульсными характеристиками и последующего суммирования результатов свертки.:
6. Убедиться по характеру отклика о наличии матричного резонанса в системе.
Решение задачи
Для системы с распределенными параметрами функция Грина имеет вид:

Это так называемая функция источника для уравнения системы с распределенными параметрами или ее импульсная характеристика.
Вначале выберем одну точку входа ξ1 и одну точку выхода х1, т.е. точки, для которых импульсная характеристика будет иметь вид:

Очевидно, что разность между входом и выходом может быть представлена как dk=(x1-ξ1).
Если произвести замену  , то выражение (3) примет вид:
, то выражение (3) примет вид:

Если, например, произвольно выбрать 4 входа так, чтобы для них разность dm принимала значения:
d1=0,5; d2=1; d3=1,5; d4=2, то полученная совокупность импульсных характеристик по всем входам в интервале от τ=0 до τ=10 через Δτ=0,1 и их сумма будут иметь вид, представленный на фиг. 2.
Соответственно, чем больше растояние dm, тем меньше максимум импульсной, характеристики.
Для вычисления отклика системы необходимо определить вид сигнала, являющегося для каждого из входов «резонансным». В качестве такого сигнала, в частности, при импульсной характеристике (3), будет сигнал, являющийся ее смещено-зеркальным отображением вида:

где T - ограниченная длительность сигнала.
Аналогичными, с учетом координаты, должны быть «резонансные» сигналы и по другим входам системы.
Для определения резонансного отклика системы на входные сигналы необходимо вычислить свертку каждого из этих сигналов с соответствующей импульсной характеристикой и просуммировать результаты.
Выражение для выходного сигнала системы как результата дискретной свертки входного сигнала и соответствующей импульсной характеристикой имеет вид:
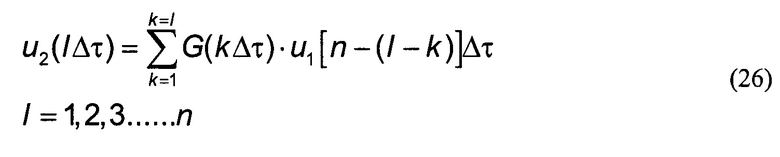
где 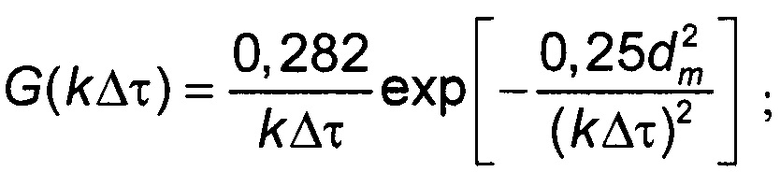

Результат вычисления дискретной свертки для каждого их 4х случаев при длительности сигнала Т=n=100, Δτ=0,1 с последующим суммированием и получением максимального отклика системы представлен на фиг. 3.
Заключение
При одновременном воздействии сигналов на различных входах системы может наблюдаться экстремальная реакция на выходе, которая при определенных условиях может спровоцировать разрушение системы. Такой подход к испытаниям системы может оказаться полезным для установления ее запаса по устойчивости к возможным разрушениям. При этом частотный анализ может не обеспечить желаемых результатов, так как частотный резонанс в системе может отсутствовать вследствие значительных потерь в ней.
Сущность изобретения заключается в том, что предлагается способ получения из всех возможных видов испытательных сигналов такой совокупности n сигналов определенной формы, ограниченных во времени и действующих одновременно в n точках объекта испытаний, которая обеспечивает максимальную реакцию объекта испытаний в определенный момент времени. Такой совокупностью является набор сигналов, имеющих вид зеркальных отображений импульсных характеристик, полученных в выходной точке объекта испытаний при предварительном поочередном воздействии ударных нагрузок в n входных точках этого объекта. А это означает возможность выявления самых опасных отклонений параметров конструкции, которые не могут быть обнаружены с помощью известных способов испытаний.
Описание чертежа изобретения к патенту;
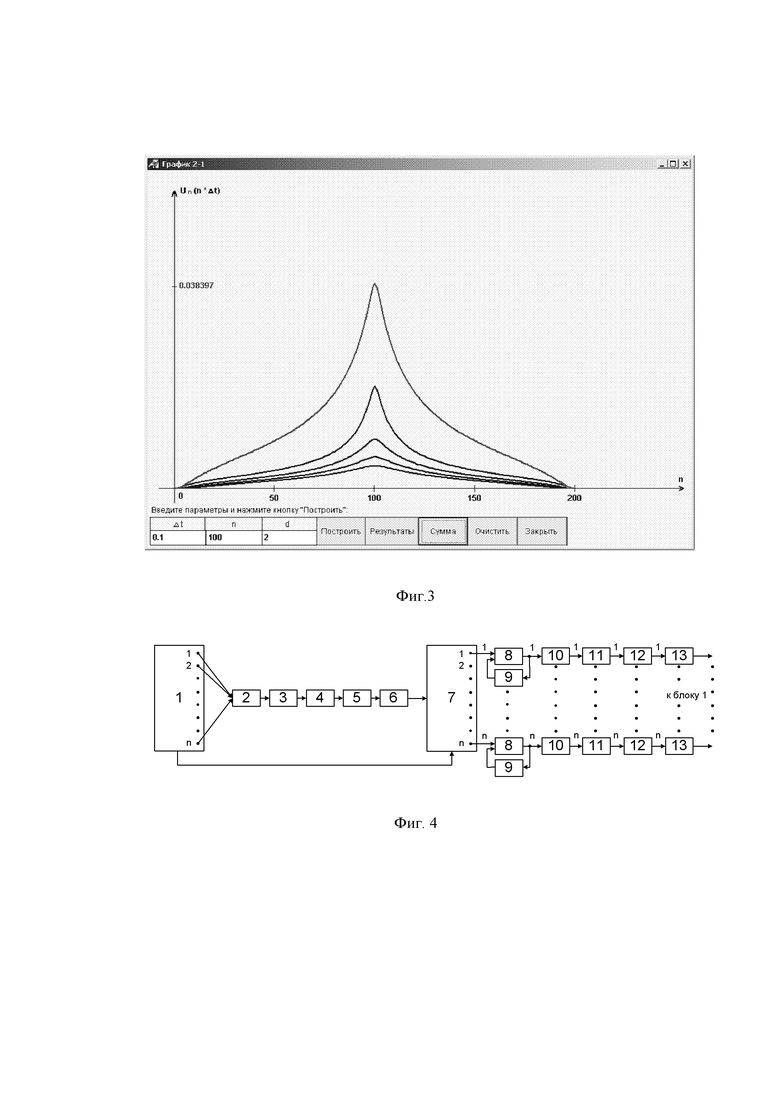
На фиг. 4 представлена совокупность функциональных блоков, реализующих в конечном итоге групповой испытательный сигнал, воздействующий на объект испытаний в соответствии с алгоритмом, отражающем сущность изобретения.
Представленная на фиг. 4 совокупность функциональных блоков включает в себя ударное устройство (блок 1), создающее в пределах одного цикла испытаний на своих n выходах последовательно с интервалом Т тактовые ударные n импульсов, воздействующие физически на объект испытаний в заданных n точках объекта испытаний (блок 2). Реакция объекта испытаний на каждый из последовательности n ударных импульсов, имеющая в точке наблюдения объекта испытаний вид различных механических колебаний, поступает на преобразователь механических колебаний в электрические аналоговые сигналы (блок 3), с выхода которого аналоговые сигналы поступают на вход аналого-цифрового преобразователя (АЦП) - (блок 4), преобразующий аналоговые сигналы в последовательность групп цифровых отсчетов, каждая из которых ограничивается во времени интервалом Т в блоке 5. Полученная последовательность групп цифровых отсчетов поступает на вход преобразователя кодов (блок 6), в котором в каждой группе цифровых отсчетов путем перестановки двоичных символов формируется зеркальная, по отношению к исходной, последовательность групп цифровых отсчетов испытательного сигнала.
Группы цифровых отсчетов испытательного сигнала с выхода блока 6 подаются на вход коммутатора (блок 7), имеющего один вход и n выходов и управляемого тактовыми импульсами ударного устройства (блок 1). С n выходов коммутатора (блока 7) группы цифровых отсчетов последовательно по тактам направляются на входы n параллельных каналов, в каждом из которых соответствующая группа цифровых отсчетов поступает на первые входы своих сумматоров (блоки 8), с выхода которых через свои линий задержки (блоки 9) на время nT поступают на вторые входы своих сумматоров (блоков 8), образуя периодическую последовательность групп цифровых отсчетов. Периодическая последовательность групп цифровых отсчетов с выходов n сумматоров 8 поступает на входы своих выравнивающих линий задержки (блоков 10) с номерами входов k 1≤k≤n, причем, каждая из линий задержки задерживает свой сигнал на время, равное (n-k)Т, где Т - длительность группы цифровых отсчетов. В результате этого на выходах всех выравнивающих линий задержки все группы цифровых отсчетов появляются одновременно и действуют в одном и том же интервале времени Т.
С выходов n выравнивающих линий задержки (блоков 10) группы цифровых отсчетов подаются на n входов цифро-аналоговых преобразователей (ЦАП) (блоков 11), преобразующих последовательность групп цифровых отсчетов каждого сигнала в последовательность одновременно действующих аналоговых испытательных сигналов длительностью Т. С выходов цифро-аналоговых преобразователей (блоков 11) испытательных сигналов всех параллельных каналов эти испытательные сигналы подаются на входы усилителей мощности (блоки 12), с выходов которых испытательные сигналы поступают на исполнительные механизмы (блоки 13), преобразующие аналоговые электрические испытательные сигналы в n одновременно действующих механических воздействий, приложенных в n точках объекта испытаний, а реакция объекта в точке наблюдения оценивается измерительной системой.
Описанная блок-схема, представленная на фиг. 4, реализует предложенный способ испытаний, при котором групповые ударные воздействия испытательного сигнала в n точках конструкции или системы многократно с периодом nT повторяются после однократного действия на входе системы группы из n последовательных ударных импульсов. При этом прекращение процедуры испытаний инициируется оператором.
Реализация предложенного способа возможна и в однократном режиме испытаний, когда групповое воздействие испытательных сигналов в n точках конструкции или системы производится однократно. Для этого необходимо из блок-схемы, представленной на фиг. 4, исключить n сумматоров (блоков 8) и n линий задержек (блоков 9), обеспечивающих периодический процесс испытаний.
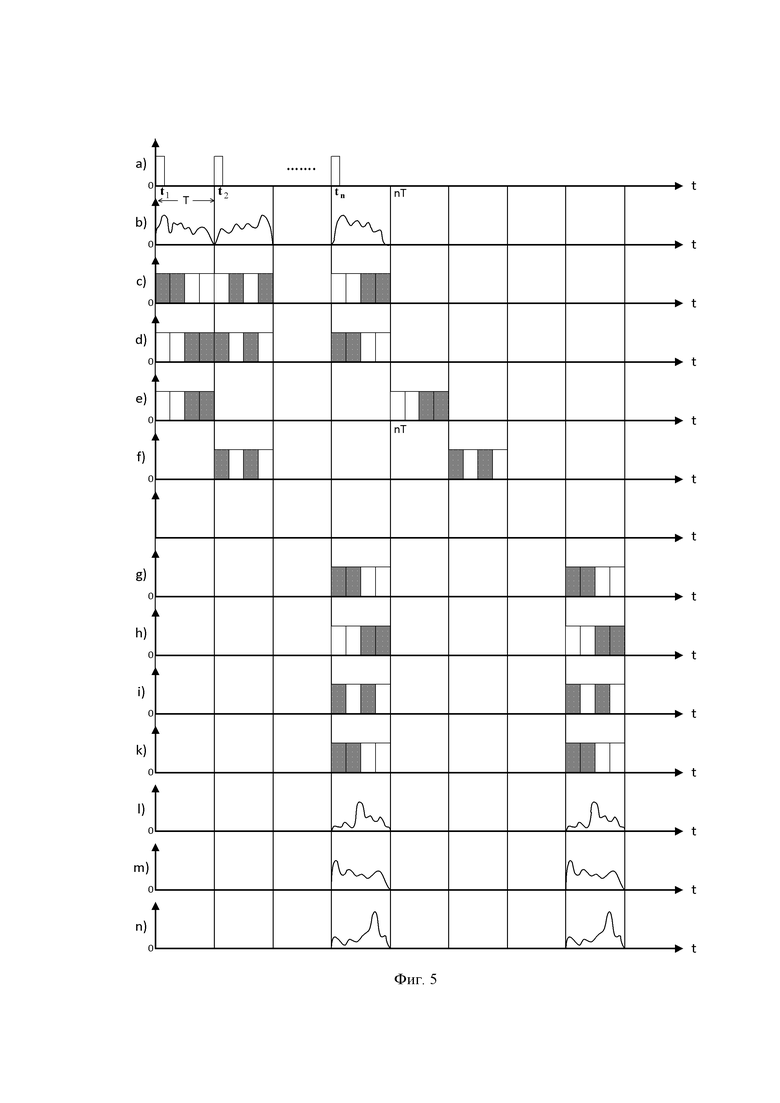
На фиг. 5 представлена временная диаграмма работы системы, реализующей предложенный способ испытаний.
Последовательность периодических ударных импульсов на выходе блока 1 представлена на фиг. 5а.
Последовательность аналоговых сигналов-реакций объекта испытаний на ударные импульсы на выходе блока 3 представлены на фиг. 5b.
Последовательность групп цифровых отсчетов соответствующих сигналов - реакций на ударные импульсы на выходе АЦП блока 4 представлены на фиг. 5с.
Последовательность ограниченных интервалом Т зеркальных групп цифровых отсчетов на выходе блока 6 преобразователя кодов представлена на фиг 5d.
Последовательность сдвинутых на интервал Т друг от друга n зеркальных групп цифровых отсчетов на выходе коммутатора блока 7 представлена на фиг. 5е, f, g.
Одновременно действующие группы зеркальных цифровых отсчетов испытательных сигналов на выходах блоков 10 выравнивающих линий задержки представлены на фиг. 5h, i, k.
Одновременно действующие группы зеркальных аналоговых испытательных сигналов на выходах блоков цифро-аналоговых преобразователей блоков 11 представлены на фиг. 5l, m, n.
Эти одновременно действующие аналоговые испытательные сигналы соответствующей мощности имеют место на выходах блоков усилителей мощности 12 и на входах исполнительных механизмов 13, осуществляющих одновременное испытательное воздействие в n точках объекта испытаний.
Примечание:
На фиг. 5. в интервале времени от 0 до nT представлена диаграмма первого цикла однократного режима испытаний. Второй цикл испытаний при многократном режиме начинается с момента nT.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ КОНСТРУКЦИЙ И СИСТЕМ НА МЕХАНИЧЕСКИЕ И ЭЛЕКТРОННЫЕ ВОЗДЕЙСТВИЯ | 2014 |
|
RU2569636C2 |
| Способ динамических испытаний конструкций и систем на механические и электронные воздействия | 2021 |
|
RU2787559C1 |
| Устройство для определения динамических характеристик материалов | 1985 |
|
SU1283570A1 |
| Устройство и способ акустических измерений множества громкоговорителей и системы направленных микрофонов | 2011 |
|
RU2616345C2 |
| СПОСОБ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ КРУПНОМАСШТАБНЫХ КОНСТРУКЦИЙ | 1995 |
|
RU2104508C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЧАСТОТНЫХ ХАРАКТЕРИСТИК ИЗМЕРИТЕЛЬНЫХ КАНАЛОВ ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНЫХ СИСТЕМ | 2000 |
|
RU2200959C2 |
| СПОСОБ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ ЗДАНИЙ И СООРУЖЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2141635C1 |
| Установка для определения динамической характеристики объекта | 1981 |
|
SU994949A1 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА ДИСКРЕТНЫХ СИГНАЛОВ, ПРОШЕДШИХ МНОГОЛУЧЕВОЙ КАНАЛ СВЯЗИ | 2013 |
|
RU2544178C1 |
| Устройство для контроля параметров ударов | 1986 |
|
SU1402822A1 |

Изобретение относится к области динамических испытаний и может быть использовано при испытаниях механических конструкций различного назначения и электронного оборудования на динамические механические или электронные воздействия. Предлагаемый cпособ динамических испытаний конструкций и систем на механические и электронные воздействия предназначен для обнаружения в процессе испытаний опасных отклонений параметров объекта испытаний. Такие отклонения не могут быть обнаружены известными способами испытаний. Причина состоит в отсутствии полного согласования между параметрами испытательного сигнала с учётом его локализации на объекте испытаний с одной стороны и параметрами объекта испытаний с учетом локализации воздействия на него в реальных условиях эксплуатации с другой стороны. В предлагаемом способе эту задачу решают помощью предварительного поочерёдного ударного возбуждения колебаний в n точках объекта испытаний и формирования в результате обработки этих возбуждений n одновременно действующих в тех же точках испытательных сигналов такой различной формы, которая обеспечивает наибольшую реакцию объекта испытаний в точке измерения по сравнению с другими многоточечными воздействиями любых других форм, в тех же точках и с той же энергией. Технический результат заключается в повышении точности и достоверности обнаружения опасных отклонений параметров объекта испытаний. 5 ил.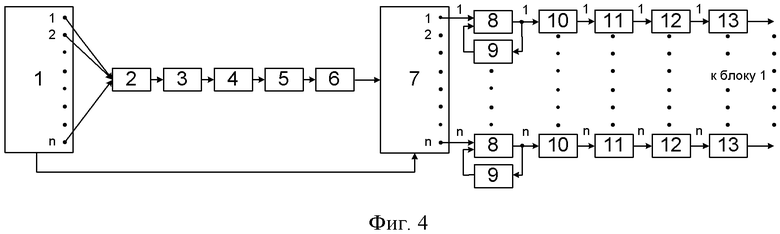
Способ динамических испытаний конструкций и систем на механические и электронные воздействия, заключающийся в нагружении испытуемой конструкции путем воздействия последовательностью ударных импульсов и получении сигналов-откликов в любой точке, где формируют их цифровые отсчеты с помощью аналого-цифрового преобразователя, ограничивают во времени последовательность этих отсчетов, формируют с помощью инвертора зеркальную последовательность этих отсчетов, формируют из последовательности упомянутых отсчетов с помощью цифро-аналогового преобразователя одиночный аналоговый испытательный сигнал, подаваемый на первый вход сумматора, с выхода которого сигнал поступает на вход линии задержки, в которой задерживается на время, равное удвоенной длительности сигнала, и поступает на вход сумматора, к которому подключен выход линии задержки, а с выхода сумматора, соединенного с входом усилителя мощности, сигнал поступает на вход усилителя мощности, с выхода которого снимается периодическая последовательность испытательных импульсов необходимой мощности, которые подают на исполнительный механизм, воздействующий на конструкцию, как объект динамических испытаний, в точке его нагружения вышеупомянутой последовательностью ударных импульсов, а измерение результата испытаний производят в точке фиксирования сигнала-отклика системы или конструкции, отличающийся тем, что заданной последовательностью n ударных импульсов, следующих c интервалом Т, воздействуют поочередно на n точек конструкции, преобразуют создаваемые n механических колебаний в точке наблюдения конструкции в n электрических сигналов, из которых формируют с помощью аналого-цифрового преобразователя последовательность n групп цифровых отсчётов сигналов-откликов на каждый ударный импульс, ограничивают длительность каждой группы последовательности цифровых отсчётов интервалом Т, формируют зеркальные отображения двоичных символов в каждой группе цифровых отсчетов сигналов-откликов и эту последовательность групп цифровых отсчётов подают на вход введённого и управляемого тактовыми импульсами с интервалом Т коммутатора, имеющего один вход и n выходов, с помощью которого распределяют подаваемую на вход введённого коммутатора последовательность групп цифровых отсчетов испытательных сигналов на n выходов этого коммутатора, соединенных со своими, соответствующими n сумматорами, на первые входы которых поступают последовательно группы цифровых отсчетов испытательных сигналов с соответствующих выходов коммутатора, а с выходов упомянутых n сумматоров эти сигналы поступают на входы соответствующих n линий задержки, в каждой из которых каждая цифровая группа сигналов задерживается на время, равное nT, т.е. произведению длительности каждой цифровой группы сигналов на количество упомянутых ударных импульсов n, а с выходов упомянутых линий задержки цифровые группы сигналов поступают на вторые входы своих n сумматоров, к выходам которых подключены n входов выравнивающих линий задержки с номерами входов 


| СПОСОБ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ КОНСТРУКЦИЙ И СИСТЕМ НА МЕХАНИЧЕСКИЕ И ЭЛЕКТРОННЫЕ ВОЗДЕЙСТВИЯ | 2014 |
|
RU2569636C2 |
| СПОСОБ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ ЗДАНИЙ И СООРУЖЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2141635C1 |
| СПОСОБ ИСПЫТАНИЯ ОБЪЕКТА НА УДАРНЫЕ ВОЗДЕЙСТВИЯ | 2004 |
|
RU2287794C9 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАГРУЖЕНИЕМ ПРИ ПРОГРАММНЫХ ИСПЫТАНИЯХ МЕХАНИЧЕСКИХ КОНСТРУКЦИЙ НА УСТАЛОСТНУЮ ПРОЧНОСТЬ | 2007 |
|
RU2365965C2 |
| DE 0019927693 A1, 21.12.2000 | |||
| DE 4308796 A1, 22.09.1994. | |||

