Область техники
Изобретение относится к системам управления городскими распределительными кабельными сетями 6–10 кВ.
Уровень техники
Из патента RU2548569 известна распределительная электрическая сеть 6–10 кВ, содержащая распределительные линии (РЛ), трансформаторные подстанции (ТП), соединенные между собой. Трансформаторные подстанции снабжены коммутационными аппаратами.
Распределительные сети 6(10) кВ, представляющие собой последний этап на пути электрической энергии к потребителю, традиционно считаются наиболее слабым звеном в системе электроснабжения. Около 70% всех нарушений электроснабжения происходит именно в сетях данного класса напряжения.
Известные способы управления городскими распределительными электрическими сетями 6–10 кВ, направленные на повышение надежности их функционирования, являются трудозатратными и требующими физической работы многочисленных сотрудников предприятий, обслуживающих такие сети.
Сущность изобретения
Задача изобретения – повышение надежности электроснабжения потребителей в распределительных кабельных электрических сетях, имеющих в своем составе, помимо трансформаторных подстанций, распределительные пункты, и снижение трудовых и временных затрат на ликвидацию повреждений, в которые входят короткие замыкания, в распределительной сети.
Задача решается с помощью системы автоматического управления городской распределительной сетью 6(10) кВ. Городская распределительная сеть, которая преимущественно является кабельной, включает в себя: распределительные линии; трансформаторные подстанции, соединенные с распределительными линиями и снабженные коммутационными аппаратами, выполненными с возможностью дистанционного выключения и/или включения контроллерами; распределительные пункты, соединенные с распределительными линиями и снабженные коммутационными аппаратами, выполненными с возможностью дистанционного выключения и/или включения контроллерами.
Отличительными признаками системы автоматического управления является то, что она включает в себя: индикаторы прохождения тока короткого замыкания, установленные с возможностью определения тока короткого замыкания, протекающего через коммутационные аппараты в трансформаторных подстанциях, и контроллеры, установленные в трансформаторных подстанциях и распределительных пунктах.
Контроллеры трансформаторных подстанций (т.е. контроллеры, установленные в трансформаторных подстанциях) могут опрашивать индикаторы прохождения тока короткого замыкания и положения коммутационных аппаратов, установленные в тех же трансформаторных подстанциях, что и опрашивающие контроллеры, а также опрашивать контроллеры, расположенные в соседних трансформаторных подстанциях. Кроме того, контроллеры, установленные в трансформаторных подстанциях, могут подавать в бестоковую паузу сигнал на выключение коммутационных аппаратов, установленных в той же трансформаторной подстанции, что и подающий сигнал контроллер, при обнаружении повреждения в распределительной сети в том случае, если коммутационные аппараты, на которые подается сигнал, являются ближайшими к повреждению распределительной сети.
Контроллеры распределительных пунктов (то есть контроллеры, установленные в распределительных пунктах) могут получать от контроллеров трансформаторных подстанций данные о повреждениях распределительной сети и фактах выключения коммутационных аппаратов, установленных в трансформаторных подстанциях и являющихся ближайшими к повреждению распределительной сети. Кроме того, контроллеры, установленные в распределительных пунктах, могут формировать сигналы на включение коммутационного аппарата в точке нормального разрыва распределительной линии и включение коммутационного аппарата распределительной линии в распределительном пункте. Контроллеры, установленные в распределительных пунктах, могут подавать указанные сигналы при условии, что указанный коммутационный аппарат в точке нормального разрыва распределительной линии и указанный коммутационный аппарат распределительной линии в распределительном пункте не являются ближайшими к повреждению распределительной сети. Система может содержать приводы, установленные на коммутационных аппаратах, которые могут обеспечивать дистанционное выключение и включение указанных коммутационных аппаратов.
Задача настоящего изобретения также решается с помощью способа автоматического управления городской распределительной сетью 6(10) кВ, осуществляемого вышеописанной системой автоматического управления городской распределительной сетью 6(10) кВ. Способ содержит следующие шаги: контроллеры трансформаторных подстанции опрашивают те индикаторы прохождения тока короткого замыкания о прохождении токов короткого замыкания и те коммутационные аппараты о положении коммутационных аппаратов, которые находятся в той же трансформаторной подстанции, что и опрашивающий контроллер; контроллеры трансформаторных подстанции опрашивают контроллеры соседних трансформаторных подстанций; контроллеры трансформаторных подстанции обрабатывают полученные данные; и контроллер трансформаторной подстанции в бестоковую паузу подает сигнал на выключение коммутационных аппаратов в той же трансформаторной подстанции, что и подающий сигнал контроллер, в том случае, если указанные коммутационные аппараты являются ближайшими к повреждению распределительной сети; контроллеры распределительных пунктов получают от контроллеров трансформаторных подстанций данные о повреждениях распределительной сети и фактах выключения коммутационных аппаратов, установленных в трансформаторных подстанциях и являющихся ближайшими к повреждению распределительной сети; после чего контроллер распределительного пункта, от которого питается распределительная линия с повреждением, по факту выключения ближайших к повреждению распределительной сети коммутационных аппаратов формирует сигналы на включение коммутационного аппарата в точке нормального разрыва распределительной линии и коммутационного аппарата распределительной линии в распределительном пункте при условии, что данные коммутационные аппараты не являются ближайшими к повреждению распределительной сети.
Согласно предпочтительному варианту осуществления способа, в контроллеры трансформаторных подстанций могут ввести (например, путем записи) информацию о коммутационных аппаратах, являющихся соседними для каждого из коммутационных аппаратов, входящих в состав трансформаторной подстанции. Кроме того, при определении ближайшего повреждению распределительной сети коммутационного аппарата контроллер трансформаторной подстанции может сравнивать показания индикаторов прохождения тока короткого замыкания, установленных на соседних коммутационных аппаратах и может определять проверяемый коммутационный аппарат ближайшим повреждению распределительной сети, если показания индикаторов прохождения тока короткого замыкания, установленных на соседних коммутационных аппаратах, различаются.
Кроме того, перед началом способа контроллер распределительного пункта может получить сигнал о выключении в распределительном пункте коммутационного аппарата, соединенного с распределительной линией, в которой проходит ток короткого замыкания, и подать команду в контроллеры трансформаторных подстанций о начале осуществления вышеописанных действий.
Благодаря изобретению достигается быстрое самовосстановление распределительной сети до запуска автоматического ввода резервного питания (АВР) в ТП. Это стало возможным благодаря быстрому определению и отключению в автоматическом режиме коммутационных аппаратов, ближайших к поврежденному участку сети, что обеспечивается быстродействующим алгоритмом определения коммутационных аппаратов, которые необходимо выключить для отключения поврежденного участка (ближайших к такому участку коммутационных аппаратов), содержащим незначительное количество шагов и распределенного по множеству контроллеров, установленных в трансформаторных подстанциях и распределительных пунктах. Все это обеспечивает такие технические результаты, как снижение временных и трудовых затрат на восстановление распределительной сети, что приводит к повышению надежности электроснабжения потребителей. Также снижены затраты на переоборудование распределительной сети, подготовку системы управления и автоматизацию процессов ликвидации повреждений распределительной сети, в которые входят короткие замыкания. Затраты на подготовку системы управления и автоматизацию процессов ликвидации повреждений распределительной сети снижаются благодаря снижению требований к контроллерам и каналам обмена данными, поскольку настоящее изобретение позволяет реализовать простые и эффективные алгоритмы восстановления распределительной сети, не требующие больших вычислительных мощностей и обмена большими объемами данных между ними.
Краткое описание чертежей
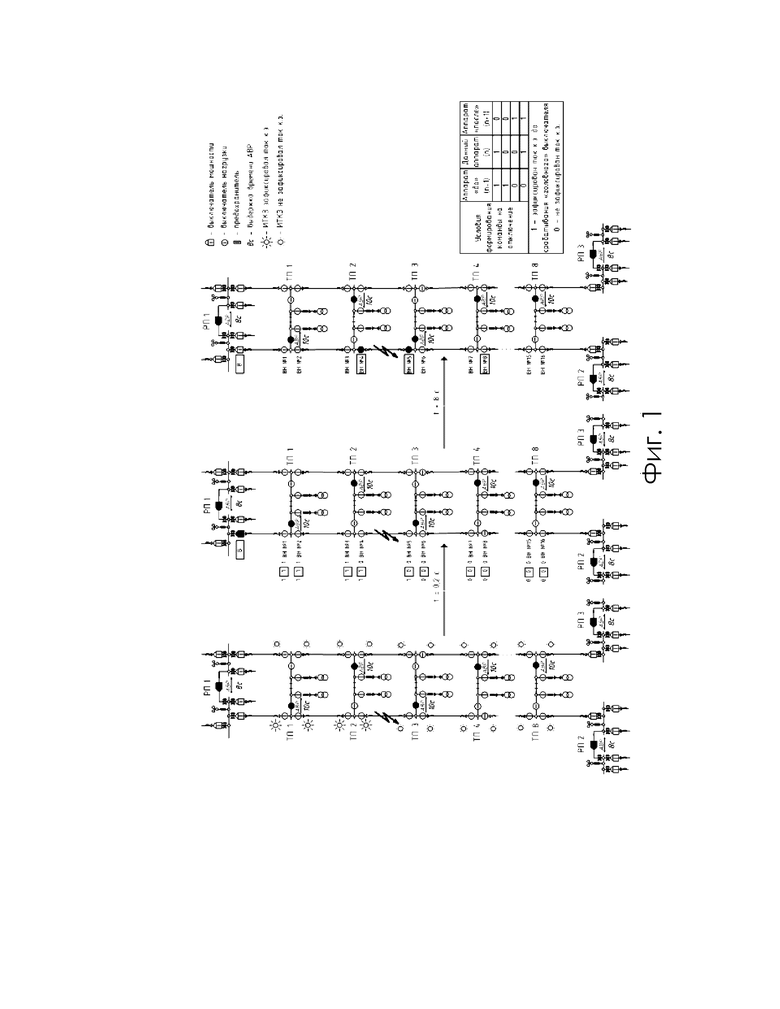
На фиг. 1 представлена схема участка сети 6–10 кВ и показана работа алгоритма самовосстановления при повреждении на кабельной линии (КЛ).
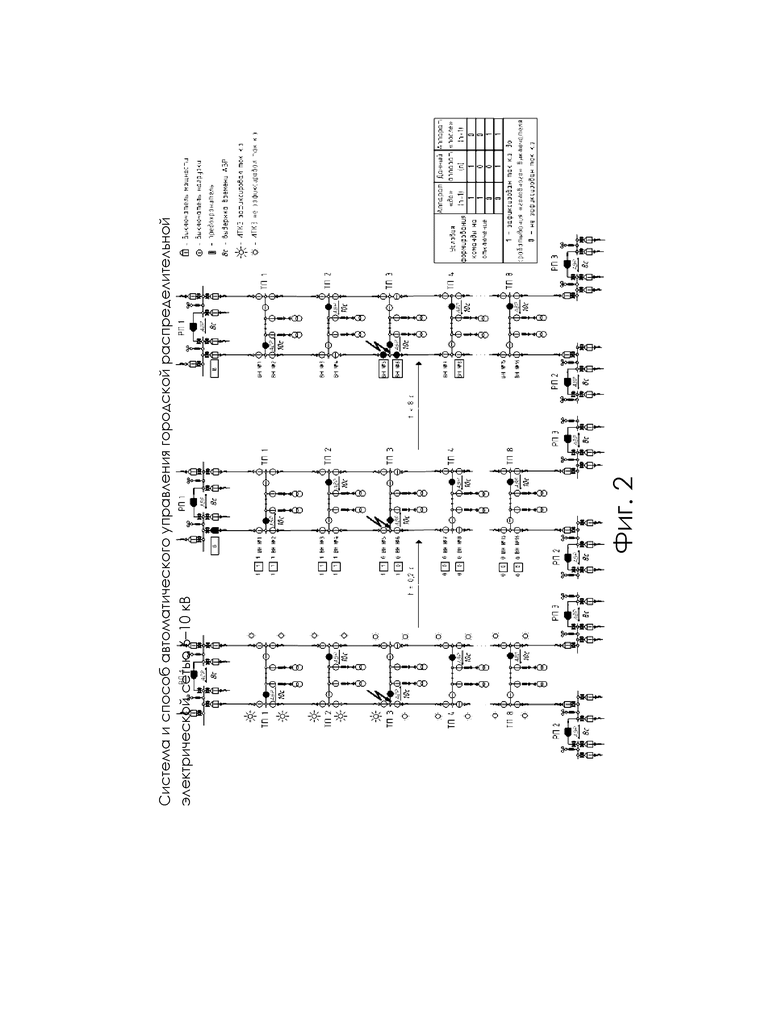
На фиг. 2 представлена схема участка сети 6–10 кВ и показана работа алгоритма самовосстановления при повреждении в ТП.
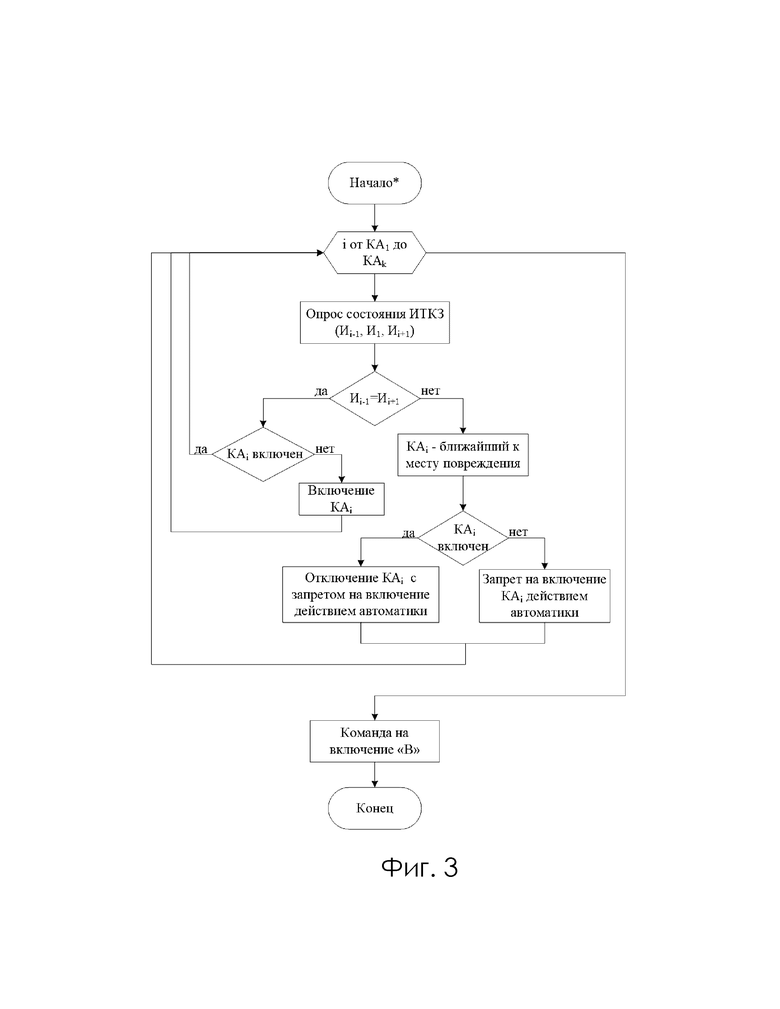
На фиг. 3 – блок-схема алгоритма самовосстановления.
Осуществление изобретения
Городская распределительная сеть 6(10) кВ, состоит из распределительных пунктов 6(10) кВ, трансформаторных подстанций 6(10)/0,4 кВ, распределительных линий 6(10) кВ в кабельном исполнении. Распределительные пункты и трансформаторные подстанции, в свою очередь, имеют в своем составе коммутационные аппараты 6(10) кВ и соединены с распределительными линиями (а через распределительные линии между собой). Распределительные пункты питаются от центров питания 6(10) кВ (ЦП) по фидерам 6(10) кВ в кабельном исполнении.
В частности, трансформаторные подстанции (ТП) в качестве коммутационных аппаратов могут содержать выключатели нагрузки (ВН) линейных присоединений (то есть распределительных линий, РЛ) и выключатели нагрузки (ВН), задействованные в схеме местного автоматического ввода резерва (АВР), который предполагает автоматическое переключение питания ТП (либо секции ТП) с одной РЛ на другую при снижении напряжения в ТП (либо на секции ТП) ниже порогового значения (при условии, что ТП может получать питание от ЦП по двум различным РЛ). Распределительные пункты (РП) в качестве коммутационных аппаратов могут содержать выключатели мощности, выполненные (установленные) с возможностью отключения (обесточивания) распределительных линий (РЛ) и/или трансформаторных подстанций (ТП), например, в результате срабатывания токовой защиты или при определении протекания тока к.з. Выключатели мощности могут быть снабжены токовыми защитами и автоматикой.
Все указанные коммутационные аппараты могут дистанционно выключаться и/или включаться контроллерами. В частности, в зависимости от конструкции встроенных приводов, коммутационные аппараты (все или часть) могут дистанционно выключаться, или дистанционно включаться – в этих случаях обратное действие может осуществляться вручную. Это возможно в том случае, если коммутационный аппарат снабжен, например, пружинным приводом с электромагнитом, благодаря которому коммутационный аппарат может быть включен (или выключен) при условии предварительного взвода пружины, который может осуществляется вручную, либо электродвигателем, если таковой предусмотрен.
Наличие возможности дистанционного включения или выключения с помощью приводов существенно упрощает достижение технического результата настоящего изобретения по сравнению с коммутационными аппаратами с ручным приводом, так как, по меньшей мере, часть действий по перекоммутации сети электроснабжения возможно осуществить дистанционно, что снижает трудозатраты персонала и ускоряет процесс ввиду отсутствия необходимости поездки персонала на ТП или РП для осуществления хотя бы части действий по включению/выключению коммутационных аппаратов.
Достижение технического результата в наиболее полной мере возможно в том случае, если коммутационные аппараты (предпочтительно, все) снабжены приводами (например, моторизованными, с электродвигателем), которые позволяют дистанционно осуществлять как выключение, так и включение коммутационных аппаратов – в этом случае для перекоммутации сети электроснабжения поездки персонала в ТП или РП могут не требоваться вообще, а сама коммутация осуществляется максимально быстро.
Установленные в сети коммутационные аппараты снабжены приводами, часть из которых (либо все) обеспечивают возможность дистанционного включения и выключения связанных с ними коммутационных аппаратов. Если приводы части установленных коммутационных аппаратов не могут обеспечивать возможность дистанционного включения и/или выключения, то они либо могут быть дооснащены электродвигателями без замены КА, либо потребуется замена КА на КА с приводом, обеспечивающим возможность дистанционного включения и/или выключения КА.
Настоящее изобретение представляет собой способ автоматического управления кабельной распределительной сетью, отличительной особенностью которого является наделение управляемой сети функциями самовосстановления.
Самовосстановление подразумевает:
- автоматическое определение поврежденного присоединения (фидер от ЦП и РЛ от РП);
- автоматическое определение, между какими двумя ТП (или в какой ТП) произошло повреждение;
- селективное автоматическое отключение (локализация) только поврежденного участка РЛ ближайшими коммутационными аппаратами;
- автоматическое восстановление электроснабжения максимально возможного числа потребителей в минимально короткое время.
Способ автоматического управления городской распределительной электрической сетью 6–10 кВ заключается в фиксации факта повреждения и отключении РЛ выключателем мощности в РП, локализации повреждения на участке РЛ или ТП, отключении поврежденного участка РЛ или ТП ближайшими коммутационными аппаратами и восстановлении электроснабжения потребителей неповрежденной части сети.
Фиксация повреждения происходит токовыми защитами, которые формируют сигнал на выключение коммутационного аппарата (выключателя мощности) в РП. Выключатель отключает распределительную линию, размыкая свои контакты, и контроллер РП формирует сигнал, являющийся начальным условием для запуска алгоритма самовосстановления.
Первоочередным, необходимым для автоматизации схемы элементом является измерительный орган, фиксирующий прохождение тока повреждения (индикаторы/указатели прохождения тока короткого замыкания (к.з.), сокращенно – ИТКЗ, УТКЗ). Индикаторы прохождения тока короткого замыкания устанавливаются в ТП с обеспечением возможности определения прохождения тока короткого замыкания через коммутационные аппараты в трансформаторных подстанциях. Для того, чтобы индикатор прохождения тока короткого замыкания мог определить прохождение тока короткого замыкания через коммутационный аппарат, необходимо, чтобы чувствительный элемент (датчик) индикатора был расположен на/около коммутационного аппарата и/или токопроводов/шин/кабелей/РЛ, подключенных к коммутационному аппарату, с возможностью определения тока короткого замыкания.
Чувствительным элементом (датчиком) индикатора может быть любое устройство, известное из уровня техники, способное определять физическую величину, характеризующую ток, протекающий через коммутационный аппарат, например, уровень магнитного поля (например, повышенный уровень) около коммутационного аппарата и/или токопроводов/шин/кабелей/РЛ, подключенных к коммутационному аппарату. В частности, такими чувствительными элементами для определения величины магнитного поля могут быть, например, трансформатор тока, герконовый датчик, электромагнитная катушка и т.п.
Устанавливать такой чувствительный элемент (датчик) индикатора необходимо так, чтобы он имел возможность определить измеряемую физическую величину, отражающую ток, протекающий через коммутационный аппарат. Например, при определении величины магнитного поля датчик магнитного поля должен быть расположен на таком расстоянии от коммутационного аппарата и/или токопроводов/шин/кабелей/РЛ, подключенных к коммутационному аппарату, чтобы величина магнитного поля, генерируемого током, протекающим через коммутационный аппарат и подключенные к нему токопроводы/шины/кабели/РЛ (например, током короткого замыкания), в месте расположения чувствительного элемента (датчика) была определяема (измеряема) датчиком (чувствительным элементом) с обеспечением возможности определения наличия/отсутствия тока короткого замыкания.
Установленный описанным способом чувствительный элемент (датчик) индикатора обеспечивает возможность определения протекания тока короткого замыкания через коммутационный аппарат и может обозначаться в настоящем описании как «индикатор прохождения тока короткого замыкания, установленный на коммутационном аппарате», например, на ВН линейных присоединений и на ВН, задействованных в схеме АВР. Для фиксации всех видов коротких замыканий необходимо наличие пофазных индикаторов ИТКЗ.
Индикатор работает следующим образом. Сигнал от датчика (чувствительного элемента) поступает на цепь сравнения с пороговым значением (уставкой), превышение которого будет означать протекание тока короткого замыкания. В том случае, когда индикатор определил таким образом протекание тока короткого замыкания, он выдает сигнал об этом. Индикатор может удерживать сигнал о протекании тока короткого замыкания и после окончания протекания тока короткого замыкания.
Для реализации автоматического отключения повреждения, необходимо помимо фиксации прохождения токов к.з. на всех присоединениях в ТП, установить контроллеры в ТП и в РП. Кроме того, требуется обеспечить передачу данных между ТП и РП, которая преимущественно должна быть надежной и быстродействующей. Контроллеры, ИТКЗ, КА и/или их приводы и другое оборудование предпочтительно соединены каналами связи, по которым между указанным оборудованием может осуществляться передача сигналов, данных, информации, команд, инструкций и т.п. Каналы связи могут быть проводными, беспроводными, оптическими, радиоканалами, аналоговыми, цифровыми или любыми другими видами соединений, известных из уровня техники и обеспечивающих передачу сигналов, данных, информации, команд, инструкций и т.п.
В ТП устанавливают контроллеры, реализующие функции сбора и передачи телеизмерений, телесигнализации (опрос индикаторов прохождения тока короткого замыкания, положения коммутационных аппаратов данной ТП, а также контроллеров соседних ТП), обработки данных и выдачи команд на выключение коммутационных аппаратов в данной ТП в случае, если они ближайшие к месту повреждения.
Построение кабельной сети среднего напряжения на таких коммутационных аппаратах как выключатели нагрузки определяет целесообразность отключения повреждения в бестоковую паузу (после отключения распределительной линии выключателем мощности в РП и до начала работы АВР в ТП), так как выключатели нагрузки не способны коммутировать токи к.з. Применение вакуумных/элегазовых выключателей, способных коммутировать токи к.з., не позволяет решить проблему быстрого отключения поврежденного участка, поскольку для определения поврежденного участка требуется выполнять отстройку между собой команд на выключение коммутационных аппаратов по маршруту питания нагрузки по времени в зависимости от удаленности от источника питания для обеспечения селективности отключения участков. То есть, чтобы произошло выключение ближайшего к поврежденному элементу коммутационного аппарата (со стороны источника питания от поврежденного элемента), а следующий коммутационный аппарат выше по направлению к источнику питания остался включен, задержка времени формирования команды на выключение каждого следующего выше по направлению к источнику питания коммутационного аппарата должна быть больше.
Так как коммутационных аппаратов по маршруту питания нагрузки может быть много, и согласно вышеописанному принципу по мере приближения к источнику питания задержка времени формирования команды на выключение КА увеличивается, то задержка времени формирования команды на выключение коммутационного аппарата, ближайшего к источнику питания, превысит предельную длительность существования короткого замыкания в сети, обусловленную термической стойкостью оборудования ЦП и РП.
Таким образом, обеспечить самовосстановление сети электроснабжения только с помощью установки в ТП вакуумных/элегазовых выключателей, способных коммутировать токи к.з. и оснащенных токовыми защитами, не представляется возможным. То есть, замена выключателей нагрузки в ТП на выключатели мощности, способными коммутировать токи к.з. и оснащенные токовыми защитами, не позволит отключать только поврежденный участок от действия указанных токовых защит без отключения всей распределительной электросети головным выключателем мощности в РП ввиду отсутствия возможности отстройки срабатывания защит в ТП и РП по времени (необходимое число ступеней не уложится в предельное время срабатывания токовой защиты выключателей мощности в РП, что обусловлено пределами термической стойкости оборудования).
Таким образом, работа алгоритма самовосстановления в период бестоковой паузы (от выключения выключателя мощности и до момента срабатывания АВР в ТП) определяется (обуславливается) структурой сети и способом ее работы.
Отключение поврежденного участка распределительной сети (до окончания бестоковой паузы) в соответствии с настоящим изобретением обеспечивается быстродействующим алгоритмом определения поврежденного участка КЛ (ближайших к месту повреждения коммутационных аппаратов) и последующей коммутации цепей без протекания токов к.з. в бестоковую паузу с помощью коммутационных аппаратов, обеспечивающей отключение поврежденного участка КЛ и восстановление подачи электроэнергии, причем реализация алгоритма не требует значительных мощностей и не создает большой нагрузки на каналы связи.
Ближайшими к месту повреждения сети коммутационными аппаратами являются те аппараты, которые непосредственно соединены с местом повреждения сети, например, с кабельной линией, а не через другие коммутационные аппараты.
Для обеспечения достижения технического результата в РП также устанавливают контроллеры, реализующие функции восстановления электроснабжения максимального числа потребителей поврежденной РЛ в минимально короткие сроки подачей команд на включение выключателя нагрузки в точке нормального разрыва РЛ, и выключателя мощности в РП, причем сигналы подаются при условии, что данные коммутационные аппараты не являются ближайшими к месту повреждения.
Точка нормального разрыва, которая также может называться точкой токораздела, представляет собой местоположение коммутационного аппарата или сам коммутационный аппарат в распределительной электрической сети, который при нормальной работе сети должен быть выключен, поскольку разделяет участки сети, работающие от разных источников питания.
Для осуществления автоматического дистанционного отключения поврежденного участка ближайшими выключателями нагрузки они должны быть управляемыми дистанционно, например, иметь приводы с электромагнитом выключения (также может называться электромагнит отключения). Наличие электромагнита выключения при взведенном состоянии пружины привода ВН во включенном состоянии ВН позволяет создать схему управления, в которой по сигналу может быть осуществлено замыкание цепи электромагнита выключения, причем благодаря этому замыканию срабатывает электромагнит с последующим действием приводного механизма на отключение (размыкание) главных контактов выключателя нагрузки друг от друга.
Целесообразно установить в точке нормального разрыва РЛ коммутационный аппарат с моторизованным приводом либо с пружинным приводом обратной конструкции (когда взведенное состояние пружины соответствует выключенному положению ВН, и подачей сигнала на электромагнит выключения ВН может быть приведен во включенное состояние), тогда на последнем шаге алгоритма управления контроллер РП подает сигнал также и на его включение, завершая тем самым полное самовосстановление схемы.
Далее со ссылкой на фиг. 1-3 продемонстрируем настоящее изобретение. Для описания логики работы предлагаемого алгоритма введём обозначение показаний ИТКЗ:
1 – зафиксирован ток к.з., превысивший заданную уставку;
0 – не зафиксирован ток к.з., превысивший заданную уставку.
Условием для определения ближайшего к месту к.з. выключателя нагрузки (фиг. 1) будет набор из показаний трёх ИТКЗ: ИТКЗ предыдущего выключателя, ИТКЗ данного выключателя и ИТКЗ следующего выключателя. Например, на фигуре 1 для принятия решения, является ли ВН №4 ближайшим к месту к.з. анализируются показания [ИТКЗ_ВН№3; ИТКЗ_ВН№4; ИТКЗ_ВН№5]. Выключатель нагрузки «n» определяется как ближайший к месту повреждения, если комбинация показаний [ИТКЗ(n-1); ИТКЗn; ИТКЗ(n+1)] для него совпадает с одной из: [1;1;0], [0;1;1], [1;0;0], [0;0;1]. Выключатель в РП определяется как ближайший к месту повреждения, если [ИТКЗ(n-1); ИТКЗn] или [ИТКЗn; ИТКЗ(n+1)] совпадает с [1;0], [0;1].
Реализация предложенного алгоритма в схеме на фиг. 1 определит следующую последовательность переключений при к.з. на луче №1 между ТП2 и ТП3:
- при КЗ на луче №1 между ТП2 и ТП3 с выдержкой времени 0,2 с отключается выключатель «В» присоединения на первой секции РП 1, ТП2 и ТП4 остаются без напряжения;
- далее контроллеры ТП и РП запускают алгоритм и опрашивают контроллеры соседних с ними ТП;
- на основе полученных данных ВН№4 и ВН№5 определяются как ближайшие к месту к.з.;
- контроллер ТП 2 формирует сигнал на выключение ВН№4 и контроллер ТП 3 формирует сигнал на выключение ВН№5, соответственно;
- контроллер РП 1 отпрашивает контроллеры ТП на предмет успешности выключения ближайших к месту повреждения ВН и формирует сигнал на включение «В» (в РП) и «ВН№8» (в точке нормального разрыва);
- не позднее чем через 8 с после запуска алгоритма (время выбрано для отстройки от уставки по времени АВР) включаются выключатели «В» (в РП) и «ВН№8» (в точке нормального разрыва), тем самым восстанавливается электроснабжение и предотвращается работа АВР в ТП.
Таким образом, получим, так называемую, «самовосстанавливающуюся» схему – схему, которая при возникновении повреждения автоматически преобразуется в ремонтную схему.
В случае неуспешного самовосстановления (если за временную уставку АВР в ТП питание отключенной секции не восстановилось) запускается АВР в ТП. Таким образом, АВР здесь становится вспомогательным мероприятием, работающим только при неуспешности автоматического восстановления схемы. Если в результате работы алгоритма самовосстановления происходит включение на не устранившееся к.з., система должна автоматически блокировать повторное выполнение алгоритма и сигнализировать о неисправности. Следует отметить, что при штатной работе алгоритма включение на не устранившееся к.з. практически невозможно, так как команда на восстановление питания посредством включения головного выключателя и ВН в точке нормального разрыва подается только после получения головным контроллером сигналов об успешном отключении поврежденного участка.
Алгоритм прост и не требует значительных вычислительных мощностей контроллеров и больших объемов передачи информации по каналам связи, которые используются сетью электроснабжения, что имеет большое значение для больших и разветвленных сетей электроснабжения. Какой бы большой и разветвленной ни была сеть электроснабжения, количество запросов от контроллеров друг к другу не будет расти в геометрической прогрессии, а всего лишь будет примерно соответствовать количеству ТП, поскольку контроллер каждой ТП опрашивает все индикаторы прохождения тока короткого замыкания, установленных на с обеспечением возможности определения протекания токов короткого замыкания через коммутационные аппараты, входящие в состав той ТП, в которой он установлен, и контроллеры соседних ТП. Благодаря этому система и способ в соответствии с изобретением одинаково корректно и быстро реализуют функции самовосстановления как при повреждениях на КЛ, так и на шинах ТП до запуска АВР ТП. Т.е. при повреждении в ТП (фиг.2) отключится выключатель мощности в РП 1, затем в бестоковую паузу определятся как ближайшие к месту повреждения и отключатся ВН№5 и ВН№6, после чего включатся выключатель «В» в РП 1 и «ВН№8» в точке нормального разрыва.
На фигуре 3 представлена блок-схема, иллюстрирующая логику работы алгоритма самовосстановления. При запуске алгоритма по факту отключения РЛ при выключении головного выключателя мощности (выключателя «В») в РП от действия токовых защит, контроллеры ТП, получив команду о начале осуществления алгоритма из контроллера РП, который, в свою очередь, получил сигнал о выключении головного выключателя мощности в РП, опрашивают индикаторы токов прохождения короткого замыкания, расположенных на том коммутационном аппарате КАi, необходимость выключения которого проверяют, и двух соседних коммутационных аппаратах КАi-1 и КАi+1. Коммутационные аппараты для опроса задаются заранее исходя из топологии распределительной сети. Коммутационные аппараты обычно расположены последовательно в цепи от источника питания к потребителю питания. Соседними коммутационными аппаратами считаются такие аппараты, которые соединены друг с другом непосредственно, с помощью КЛ или других соединительных элементов, но не через промежуточные коммутационные аппараты.
В соответствии с алгоритмом сравнивают показания индикаторов токов прохождения короткого замыкания Иi-1 и Иi+1, расположенных на тех коммутационных аппаратах КАi-1 и КАi+1, которые являются соседними для определяемого коммутационного аппарата КАi. Если их показания одинаковы (например, оба показывают прохождение тока к.з. или оба показывают отсутствие тока к.з.), то это означает, что определяемый коммутационный аппарат КАi не является ближайшим к месту повреждения распределительной сети. После этого контроллер может включить его, если он был выключен, или сразу, без включения, перейти к проверке следующего коммутационного аппарата, если определенный КАi был включен.
Если же показания индикаторов Иi-1 и Иi+1 на соседних коммутационных аппаратах КАi-1 и КАi+1 различаются (то есть, один из них показывает прохождение тока к.з., а другой показывает отсутствие тока к.з.), то контроллер принимает решение о том, что определяемый коммутационный аппарат КАi является ближайшим к месту повреждения распределительной сети и подает команду на его выключение в том случае, если он был включен, и запрещает его включение действием автоматики. Если определенный КАi был выключен, то контроллер просто запрещает его включение действием автоматики. После этого контроллер переходит к проверке следующего коммутационного аппарата на то, является ли он ближайшим к месту повреждения.
После проверки всех коммутационных аппаратов на то, являются ли они ближайшими к месту повреждения распределительной сети, отключения ближайших КА и включения КА, не являющихся ближайшими, и последующего включения выключателя «В» в РП в точке нормального разрыва, сеть электроснабжения оказывается восстановленной и алгоритм заканчивается.
Разработанная система автоматического управления может быть развернута как локально – на участке сети с реализацией местного управления, так и интегрирована в автоматическую систему управления (АСУ) следующей смешанной архитектуры:
- централизованная архитектура АСУ с реализацией логики автоматического управления на уровне ПТК диспетчера РЭС;
- передача данных между объектами и центром управления – по протоколу МЭК 60850-5-104 с использованием GSM/GPRS каналов связи;
- ПТК на уровне диспетчера РЭС получает и в автоматическом режиме обрабатывает данные телеизмерений (ТИ) и телесигнализации (ТС) и согласно заложенным алгоритмам формирует управляющие сигналы – ТУ (если первичное оборудование поддерживает такую возможность), либо сигнал диспетчеру для организации проведения ручных переключений;
- внутри РП и ТП устанавливаются контроллеры телемеханики (ТМ), которые осуществляют сбор ТИ, ТС внутри объекта и передачу по сети GSM/GPRS на уровень ПТК РЭС, а также передают сигналы ТУ, полученные от ПТК РЭС, к исполнительным механизмам коммутационных аппаратов (КА);
- на локальных участках сети, где необходимо обеспечить существенное повышение надежности электроснабжения (например, схемы без возможности организации АВР в ТП, участки, где отключения сопровождаются значительным недоотпуском электроэнергии или схемы питания ответственных потребителей) при обосновании целесообразно выполнять децентрализованные САУ, как подсистемы единой централизованной АСУ;
- локальные децентрализованные САУ следует выполнять с прокладкой ВОЛС между РП и ТП и организацией горизонтального обмена данными посредством GOOSE сообщений;
- локальные децентрализованные САУ требуют установки логических контроллеров в ТП и РП с возможностью реализации в каждом из них алгоритмов принятия решений о выключении коммутационных аппаратов (КА), логический алгоритм по восстановлению питания тем не менее централизуется на уровне контроллеров РП (для простоты вывода из работы функций включения КА на всём участке сети при проведении работ).
Изобретение относится к области электротехники, в частности к системам управления городскими распределительными кабельными сетями 6–10 кВ. Технический результат заключается в повышении надежности электроснабжения потребителей и снижении эксплуатационных затрат в распределительных кабельных электрических сетях путем автоматизации процессов ликвидации технологических нарушений. Для реализации автоматического управления городской распределительной сетью 6(10) кВ в ТП на ВН линейных присоединений и на ВН, задействованных в схеме АВР, устанавливают индикаторы прохождения тока короткого замыкания; в ТП и РП устанавливают контроллеры; выключатели нагрузки с ручными приводами снабжают приводами с возможностью дистанционного управления (пружинными с электромагнитами выключения или включения либо моторизованными с выключением и включением). 2 н. и 3 з.п. ф-лы, 3 ил.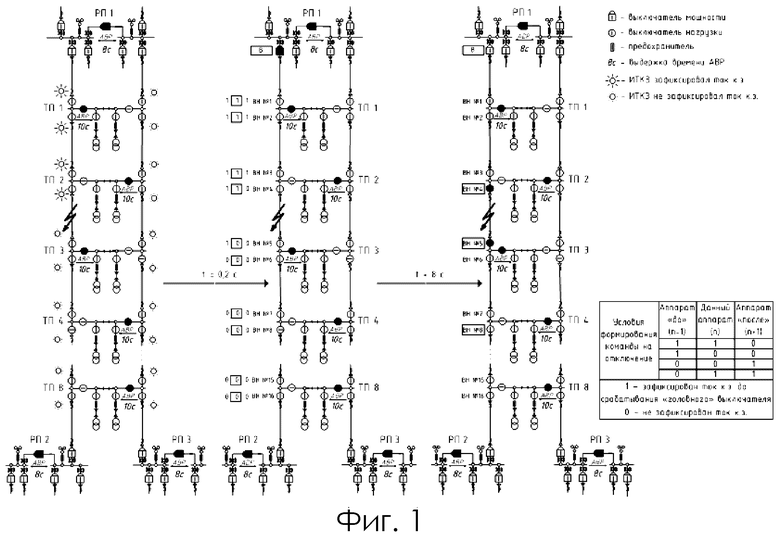
1. Система автоматического управления городской распределительной сетью 6(10) кВ, причем городская распределительная сеть включает в себя:
- распределительные линии;
- трансформаторные подстанции, соединенные с распределительными линиями и снабженные коммутационными аппаратами, выполненными с возможностью дистанционного выключения и/или включения контроллерами;
- распределительные пункты, соединенные с распределительными линиями и снабженные коммутационными аппаратами, выполненными с возможностью дистанционного выключения и/или включения контроллерами,
система автоматического управления включает в себя:
- индикаторы прохождения тока короткого замыкания, установленные с возможностью определения прохождения тока короткого замыкания через коммутационные аппараты в трансформаторных подстанциях,
- контроллеры, установленные в трансформаторных подстанциях и распределительных пунктах,
причем контроллеры трансформаторных подстанций выполнены с возможностью опроса индикаторов прохождения тока короткого замыкания и состояния коммутационных аппаратов, установленных в тех же трансформаторных подстанциях, что и опрашивающие контроллеры, а также с возможностью опроса контроллеров соседних трансформаторных подстанций и с возможностью подачи в бестоковую паузу сигнала на выключение коммутационных аппаратов, установленных в той же трансформаторной подстанции, что и подающий сигнал контроллер, при обнаружении повреждения в распределительной сети в том случае, если коммутационные аппараты, на которые подается сигнал, являются ближайшими к повреждению в распределительной сети,
причем контроллеры распределительных пунктов выполнены с возможностью получения от контроллеров трансформаторных подстанций данных о повреждениях распределительной сети и фактах выключения коммутационных аппаратов, установленных в трансформаторных подстанциях и являющихся ближайшими к распределительной линии с повреждением, и с возможностью формирования сигналов на включение коммутационного аппарата в точке нормального разрыва распределительной линии и включение коммутационного аппарата распределительной линии в распределительном пункте, причем контроллеры распределительных пунктов, выполнены с возможностью подачи указанных сигналов при условии, что указанный коммутационный аппарат в точке нормального разрыва распределительной линии и указанный коммутационный аппарат распределительной линии в распределительном пункте не являются ближайшими к повреждению распределительной сети.
2. Система по п. 1, отличающаяся тем, что система содержит приводы, установленные на коммутационных аппаратах и выполненные с возможностью обеспечения дистанционного выключения и/или включения указанных коммутационных аппаратов.
3. Способ автоматического управления городской распределительной сетью 6(10) кВ, осуществляемый системой автоматического управления по п. 1,
содержит следующие шаги:
контроллеры трансформаторных подстанций опрашивают те индикаторы прохождения тока короткого замыкания о прохождении токов короткого замыкания и те коммутационные аппараты о состоянии коммутационных аппаратов, которые находятся в той же трансформаторной подстанции, что и опрашивающий контроллер,
контроллеры трансформаторных подстанций опрашивают контроллеры соседних трансформаторных подстанций,
контроллеры трансформаторных подстанций обрабатывают полученные данные, и
контроллер трансформаторной подстанции в бестоковую паузу подает сигнал на выключение коммутационных аппаратов в той же трансформаторной подстанции, что и подающий сигнал контроллер, в том случае, если указанные коммутационные аппараты являются ближайшими к повреждению распределительной сети;
контроллеры распределительных пунктов получают от контроллеров трансформаторных подстанций данные о повреждениях распределительной сети и фактах выключения коммутационных аппаратов, установленных в трансформаторных подстанциях и являющихся ближайшими к повреждению распределительной сети,
затем контроллер распределительного пункта, от которого питается распределительная линия с повреждением, по факту выключения ближайших к месту повреждения коммутационных аппаратов формирует сигналы на включение коммутационного аппарата в точке нормального разрыва распределительной линии и коммутационного аппарата распределительной линии в распределительном пункте при условии, что данные коммутационные аппараты не являются ближайшими к повреждению распределительной сети.
4. Способ по п. 3, отличающийся тем, что в контроллеры трансформаторных подстанций вводят информацию о коммутационных аппаратах, являющихся соседними для каждого из коммутационных аппаратов, входящих в состав трансформаторной подстанции, причем при определении ближайшего повреждению распределительной сети коммутационного аппарата контроллер трансформаторной подстанции сравнивает показания индикаторов прохождения тока короткого замыкания, установленных на соседних коммутационных аппаратах, и определяет проверяемый коммутационный аппарат ближайшим повреждению распределительной сети, если показания индикаторов прохождения тока короткого замыкания, установленных на соседних коммутационных аппаратах, различаются.
5. Способ по п. 3, отличающийся тем, что перед началом способа контроллер распределительного пункта получает сигнал о выключении в распределительном пункте коммутационного аппарата, соединенном с распределительной линией, в которой проходит ток короткого замыкания, и подает команду в контроллеры трансформаторных станций о начале осуществления действий, указанных в п. 3.
| СПОСОБ УПРАВЛЕНИЯ ПРОФИЛЕМ НАГРУЗКИ ЭЛЕКТРИЧЕСКОЙ СЕТИ НИЗКОГО ИЛИ СРЕДНЕГО НАПРЯЖЕНИЯ И СВЯЗАННАЯ С НИМ СИСТЕМА УПРАВЛЕНИЯ | 2012 |
|
RU2609665C2 |
| ЭЛЕКТРИЧЕСКАЯ РАСПРЕДЕЛИТЕЛЬНАЯ СЕТЬ | 2013 |
|
RU2548569C1 |
| US 4464724 A1, 07.08.1984. | |||

