Изобретение относится к области биометрии, а именно к регистрации слабых магнитных полей биологических объектов.
Атомарные магнитометрические датчики (АМД), использующие резонансное радиочастотное (РЧ) поле, способны работать рядом друг с другом только при условии, что частота РЧ поля одинакова для всех датчиков, и привязана к средней величине поля в исследуемом объеме (либо, наоборот, средняя величина поля привязана к частоте РЧ поля). При этом измерение локального поля каждым датчиком осуществляется не по частоте сигнала магнитного резонанса (в этой схеме она одинакова для всех датчиков), а по величине сигнала ошибки S(Δω), при небольших вариациях поля пропорционального этим вариациям (фиг. 2).
Недостаток этого способа заключается в том, что вследствие неоднородности магнитного поля часть датчиков будет работать не точно в центре линии магнитного резонанса, то есть - при S(Δω)≠0. Следовательно, появятся зависимости показаний от параметров системы - вследствие зависимости k, T1, Т2 и Ω (Ω - частота Раби резонансного РЧ поля, пропорциональная его амплитуде, T1, Т2 - времена продольной и поперечной релаксации атомных моментов; k - коэффициент, зависящий от параметров системы - интенсивности излучения накачки и детектирования, температуры) от интенсивности излучения накачки и детектирования, температуры, и амплитуды РЧ поля, что приведет к снижению вариационной чувствительности системы. Кроме того, это приведет к отсутствию абсолютности. Если в классическом атомарном магнитометре (AM) величина поля однозначно определяется из значений ларморовской частоты и гиромагнитного отношения, то данная система требует калибровки.
Кроме того, при величине неоднородности поля, сравнимой с шириной линии, чувствительность АМД в такой схеме может падать до нуля вследствие уменьшения производной S'(Δω) при отстройке от центра резонансной линии (формула (2) см. ниже).
Холодов Ю.А., Козлов А.Н, Горбач А.М. Магнитные поля биологических объектов. М.: Наука, 1987. Гл. 2.4. Магнитометры с оптической накачкой, стр. 47: «Схема градиентометра с двумя датчиками разного типа имеет тот недостаток, что их частотные характеристики и реакция на изменения МП различны, это не обеспечивает максимально возможного подавления магнитных помех больших амплитуд. Этот недостаток можно устранить, если градиентометр построить на трех датчиках, два из которых - с разомкнутой петлей, а третий - автоколебательного типа, обеспечивающий работу двух первых».
Еще одно известное решение задачи обеспечения возможности работы рядом друг с другом атомарных магнитометрических датчиков (АМД), использующих резонансное радиочастотное (РЧ) поле, это замена радиочастотного поля амплитудной модуляцией излучения лазера накачки (параметрический резонанс). В идеале этот метод обеспечивает такую же чувствительность, как и классический. Но этот метод крайне дорог и неудобен, поскольку требует использования в каждом АМД акустооптического модулятора (АОМ), обеспечивающего 100% модуляцию на ларморовской частоте (десятки или сотни килогерц). Исключение - системы, в которых необходимую мощность накачки обеспечивают лазеры с вертикальным резонатором (VCSEL), мощность которых может быть модулирована током лазерного диода. К сожалению, эти лазеры не обеспечивают мощность, необходимую для АМД систем магнитоэнцефалографа (МЭГ). (Z. D. Gruji'c and A. Weis. Atomic magnetic resonance induced by amplitude-, frequency-, or polarization-modulated light. PHYSICAL REVIEW A 88, 012508 (2013) / З.Д. Гружич и А. Вайс. Атомный магнитный резонанс, вызванный амплитудно-, частотно- и поляризационно модулированным светом, Обзоры Физики А 88, 012508 (2013)).
Известен способ обнаружения магнитного поля с использованием устройства, которое включает подложку и массив оптических магнитометров, размещенных на подложке. Массив оптических магнитометров представляет собой набор оптических магнитометров, изготовленных на подложке, такой как кремний, стекло или полимерная подложка. Каждый из оптических магнитометров может быть связан, соответствовать или иным образом связан с другими компонентами, так что сигналы, обнаруженные магнитометром, могут быть дополнительно обработаны и/или проанализированы. Компоненты могут быть встроены в подложку или обеспечены внешним источником. Массив оптических магнитометров может быть устроен так, что местоположение каждого из оптических магнитометров точно откалибровано и магнитные поля, определяемые оптическими магнитометрами, соответственно профилируются. Кроме того, в тех случаях, когда магнитные поля неравномерно распределены, как и во многих биомагнитных действиях, малый размер каждого из оптических магнитометров и конструкция матрицы таковы, что магнитное поле, испытываемое одним оптическим магнитометром, является относительно однородны. Поэтому массив оптических магнитометров может точно определять отдельные части магнитного поля и в то же время обеспечивать точный профиль всего магнитного поля. Внешнее магнитное поле или измеряемое магнитное поле могут быть ориентированы под разными углами с ориентацией света от параллельного до 45° к перпендикулярному друг другу. В конкретном варианте осуществления внешнее В конкретном варианте осуществления внешнее магнитное поле является параллельным свету. (Заявка США №2007167723, МПК А61В 5/04; G01R 33/03, опубл. 19.10.2007)
Недостатком известного решения является тот факт, что решение фактически описывает геометрический дизайн многоканальной системы магнитометрических датчиков. В данном решении не решена проблема управления датчиками для выравнивания рабочих характеристик всех датчиков системы, эта тема вообще не затрагивается. Заявляемое техническое решение по управлению отдельным датчиком может быть использовано для управления датчиками, входящими в описываемый в этом исследовании массив датчиков.
Наиболее близким к заявляемому способу по достигаемому техническому результату является известное решение по патенту Германии № магнитометра с оптической накачкой, который позволяет использовать его в массивах датчиков, в которых не происходит взаимного влияния отдельного магнитометра, и способа работы устройства, включающего массив магнитометров с оптической накачкой. (Заявка Германии №102013004385, МПК G01R 33/032; G01R 33/26, опубл. 19.09.2013)
Способ работы устройства с массивом магнитометр оптической накачки заключается в том, что каждая измерительная ячейка (М) каждого измерительного канала облучается циркулярно поляризованным светом от одного и того же источника света (L), и при этом посредством модулятора интенсивности (IM) расположенного на входе в ячейку, осуществляется модуляция света в каждом канале измерения, причем может осуществляться управление частотой, глубиной и скважностью модуляции. Свет накачки модулируется по интенсивности на ларморовской частоте атомов в соответствующей измерительной ячейке. Предпочтительно однократное включение и выключение света накачки в течение каждого периода ларморовской частоты. Выравнивание и синхронизация фаз прецессии спинов атомов в измерительной ячейке (М), а также сбор необходимой информации, содержащейся в амплитудной модуляции светового пучка после прохождения через измерительную ячейку, выполняются исключительно оптическими методами. При этом необходима фазовая синхронизация спинов атомов в каждой из измерительных ячеек (М) на своей ларморовской частоте, соответствующей измеряемым магнитным полям В0(1) и В0(2)).
Недостатками известного решения являются его сложность и дороговизна, поскольку его реализация требует использования в каждом канале дорогостоящего и требующего тонкой юстировки акустооптического (АОМ) или электрооптического (ЕОМ) модулятора (обозначенного в патенте IM), обеспечивающего 100% модуляцию на ларморовской частоте, составляющей десятки или сотни килогерц.
Технической задачей, на решение которой направлено заявляемое изобретение, является обеспечение возможности работы атомарного магнитометрического датчика в составе многоканальной диагностической системы без создания помех в работе близкорасположенных аналогичных датчиков.
Поставленная техническая задача решается тем, что в способе управления атомарным магнитометрическим датчиком при работе в составе многоканальной диагностической системы, согласно заявленному изобретению, устанавливают атомарные магнитометрические датчики в многоканальной диагностической системе таким образом, что угол между любыми двумя датчиками не превышает 20°, а их ориентация по отношению к направлению вектора магнитного поля обеспечивает максимальную для данного типа датчиков чувствительность, генерируют резонансное лазерное излучение и, пропуская его последовательно через жидкокристаллический модулятор, циркулярный поляризатор, и параллельно направлению магнитного поля сквозь рабочую ячейку, осуществляют оптическую накачку атомных моментов светом с интенсивностью, обеспечивающей максимальную чувствительность датчика, согласовывают во всех датчиках фазы прецессии магнитных моментов с помощью общего для всех датчиков направленного перпендикулярно магнитному полю резонансного радиочастотного поля, таким образом, что все атомные моменты прецессируют вокруг направления локального поля с частотой ω, близкой к ларморовской частоте прецессии в данном локальном магнитном поле ω0 и одной и той же фазой, определяемой фазой радиочастотного поля, генерируют второе лазерное излучение и осуществляют оптическое детектирование сигнала магнитного резонанса, пропуская это излучение через рабочую ячейку в направлении, перпендикулярном направлении магнитного поля, детектируют на фотоприемнике интенсивность прошедшего сквозь ячейку каждого датчика детектирующего излучения и выделяют из результирующего сигнала составляющую, осциллирующую на частоте ларморовской прецессии, детектируют выделенный сигнал на синхронном детекторе, используя в качестве опорного сигнал РЧ поля, и подбирая фазу синхронного детектирования таким образом, чтобы полученная в результате зависимость напряжения U от частотной отстройки ω-ω0 имела антисимметричную форму, такую, что в центре линии магнитного резонанса U~(ω-ω0); полоса частот синхронного детектирования при этом должна быть не меньше полосы частот многоканальной диагностической системы, используют выделенный сигнал U~(ω-ω0) для управления жидкокристаллическим модулятором таким образом, чтобы полный диапазон изменения интенсивности накачки составил ±10%, измеряют напряжение на входе жидкокристаллического модулятора UM, подают на датчики калиброванные локальные магнитные поля В, измеряют зависимость напряжения UM(B) и определяют линейный коэффициент зависимости при помощи подгонки линейной регрессионной модели методом наименьших квадратов, пересчитывают измеренную величину UM в величину индукции локального поля в соответствии с полученной на предыдущем шаге линейной регрессионной зависимостью.
Технический результат, достижение которого обеспечивается реализацией всей совокупности существенных признаков заявляемого изобретения, состоит в исключении помех в работе близкорасположенных аналогичных датчиков, которое достигается за счет следующих решений:
1) использование общего для всех датчиков резонансного радиочастотного (РЧ) поля, имеющего постоянную частоту, либо привязанного по частоте к магнитному полю, измеряемому одним или несколькими датчиками многоканальной диагностической системы;
2) динамическая компенсация сдвига центра линии магнитного резонанса (возникающего в каждом датчике вследствие вариаций локального поля, и пропорционального этим вариациям), осуществляемой посредством замыкания обратной связи для управления интенсивностью света накачки, и как следствие - величиной светового сдвига линии магнитного резонанса.
3) измерение величины вариаций магнитного поля производится посредством измерения вариаций мощности накачки; в случае использования низкочастотного (0-100 Гц) модулятора интенсивности (ЖКМ - жидкокристаллического модулятора) измерение величины вариаций магнитного поля производится посредством измерения вариаций сигнала управления ЖКМ.
Сущность заявляемого изобретения поясняется рисунками, где
на фиг. 1 представлена упрощенная блок-схема классического атомарного магнитометра (AM);
на фиг. 2 схема известного атомарного магнитометрического датчика (АМД), работающего в составе МЭГ;
на фиг. 3 представлен пример схемы атомарного магнитометрического датчика (АМД), работающего в составе МЭГ, для которого реализуется заявляемый способ, который не ограничивает варианты выполнения датчика.
Рисунки на фиг. 1-3 включают следующие позиции:
1 - источник накачки (лазер),
2 - циркулярный поляризатор,
3 - рабочая ячейка,
4 - катушка РЧ поля,
5 - фотоприемник с усилителем,
6 - синхронный детектор,
7 - интегратор,
8 - генератор, управляемый напряжением,
9 - жидкокристаллический (ЖК) модулятор.
В описании авторы используют следующие понятия.
Магнитометрический датчик (МД) представляет собой устройство, предназначенное для измерения параметров магнитного поля или вариаций этих параметров.
Магнитометрический датчик, предназначенный для работы в составе магнитоэнцефалографических систем (МЭГ), должен быть способен измерять вариации модуля или компонент магнитного поля в полосе 2÷100 Гц с пространственным разрешением <1 см и вариационной чувствительностью на уровне 10÷20 фТл/√Гц; требования по чувствительности для магнитокардиографических систем (МКГ) на порядок слабее.
Магнитометр представляет собой устройство, включающая в себя один или несколько МД, схемы управления и регистрации показаний.
Многоканальная диагностическая система (МДС) представляет собой совокупность нескольких МД, сенсоры которых расположены максимально близко к поверхности (в общем случае - криволинейной) исследуемого объекта. Назначение МДС - измерение локальных временных вариаций магнитного поля, генерируемых исследуемым объектом в местах расположения сенсоров, в определенной полосе частот.
При использовании атомарных магнитометрических датчиков (АМД) в многоканальных диагностических системах, а именно в магнитоэнцефалографах (МЭГ) и магнитокардиографах (МКГ), важным условием является их способность работать в массиве из нескольких (в случае МЭГ - до двухсот) близкорасположенных датчиков, не создавая помех соседним датчикам.
Классическая схема атомарного магнитометра (AM) непригодна для использования в многоканальных системах. Вследствие неоднородности магнитного поля в исследуемой области частоты РЧ поля разных атомарных магнитометрических датчиков (АМД) будут различаться. Поскольку радиочастотное (РЧ) поле, создаваемое вокруг ячейки АМД, невозможно локализовать в пространстве этой ячейки, оно будет воздействовать на соседние датчики, что неизбежно приведет к их взаимовлиянию.
Принцип работы атомарного (или квантового) магнитометрического датчика (АМД) с оптической накачкой основан на способности магнитного момента атома прецессировать в магнитном поле, подобно волчку в гравитационном поле Земли.
Частота ω0 прецессии магнитного момента (так называемая частота Лармора, или ларморовская частота) в первом приближении пропорциональна индукции магнитного поля В:

где γ - гиромагнитное отношение, для атомов цезия (Cs) составляющее 2π⋅(3.5 Гц/нТл).
Эта величина является константой, что определяет абсолютность показаний АМД. Впрочем, частота резонанса может дополнительно смещаться внешними факторами, такими, как взаимодействующее с атомами излучение накачки.
На фиг. 3 представлен пример схемы атомарного магнитометрического датчика (АМД), работающего в составе МЭГ, для которого реализуется заявляемый способ. Атомарный магнитометрический датчик включает источник накачки (лазер) 1, жидкокристаллический (ЖК) модулятор 9, циркулярный поляризатор 2, рабочую ячейку 3, катушку радиочастотного (РЧ) поля 4, фотоприемник 5 с усилителем, синхронный детектор 6, интегратор 7.
Чувствительным элементом АМД является прозрачная (стеклянная) рабочая ячейка 3, заполненная парамагнитными (как правило, щелочными) атомами в газовой фазе. Для предотвращения столкновения атомов со стенками ячейки в нее добавляется инертный газ, либо стенки ячейки изнутри покрываются специальным покрытием. Ввод излучения накачки и детектирования осуществляется посредством оптоволокон. Источник оптической накачки датчика конструктивно не является частью датчика. Конструктивные элементы датчика выполнены из немагнитных и непроводящих материалов
Работа АМД включает следующие этапы:
1. Оптическая накачка продольным по отношению к измеряемому магнитному полю циркулярно поляризованным резонансным светом накачки - процесс, который выстраивает оси прецессии всех атомных магнитных моментов вдоль магнитного поля. В результате накачки все атомные моменты прецессируют вокруг одной оси, но со случайными фазами.
2. Фазирование прецессии атомных магнитных моментов, то есть согласование фаз их прецессии с помощью резонансного (т.е. осциллирующего с частотой ω≈ω0) радиочастотного (РЧ) поля. В результате фазирования все атомные моменты прецессируют вокруг одной оси с частотой ω≈ω0 и одной и той же фазой, определяемой фазой радиополя; появляется ненулевая суммарная вращающаяся поперечной намагниченность среды.
3. Оптическое детектирование вращающейся поперечной намагниченности среды поперечным светом детектирования. В зависимости от поляризации детектирующего луча и степени его отстройки от центра оптической линии поглощения, взаимодействие со вращающимися моментами будет приводить либо к модуляции интенсивности детектирующего луча на частоте ω≈ω0, либо к качанию его плоскости поляризации на той же частоте. Существуют упрощенные (однолучевые) схемы, в которых лучи накачки и детектирования объединены в один луч, направленный под 45° к магнитному полю. Алгоритм их работы не отличается от описанного выше. Также существуют вариации описанной выше схемы, в частности, магнитометры нулевого поля SERF, также использующие однолучевую схему, но регистрирующие сигнал не на ларморовской частоте, а на частоте внешнего модулирующего поля
Для измерения магнитного поля необходимо точно привязать частоту радиочастотного (РЧ) поля ω к ларморовской частоте ω0. После этого, зная ω0, вычисляют индукцию магнитного поля по формуле (1).
Привязка осуществляется следующим образом: сигнал модуляции детектирующего луча (также называемый сигналом магнитного резонанса) на частоте ω детектируют синхронным детектором; в качестве опорного сигнала при детектировании используют РЧ поле.
При правильном выборе фазы детектирования сигнал ошибки, возникающий при отстройке частоты РЧ поля ω от ω0, имеет форму дисперсионной кривой:

где
Δω=ω-ω0,
Ω - частота Раби резонансного РЧ поля, пропорциональная его амплитуде,
T1, Т2 - времена продольной и поперечной релаксации атомных моментов;
k - коэффициент, зависящий от параметров системы - интенсивности излучения накачки и детектирования, температуры и т.д.
Формула (2) описывает одну проекцию линии магнитного резонанса. В классической схеме AM обратная связь (ОС) замыкается по сигналу ошибки S(Δω). Сигнал ошибки используется для управления частотой РЧ поля (фиг. 1); ОС постоянно поддерживает равенство S(Δω)=0, обеспечивая тем самым выполнение условия Δω=0. Таким образом, в этой схеме частота РЧ поля ω всегда равна ларморовской частоте ω0, и пропорциональна модулю магнитного поля.
Для решения поставленной задачи авторами предлагается использовать свойство излучения накачки смещать частоту магнитного резонанса ω0 (так называемый световой сдвиг магнитного резонанса). Величина этого сдвига пропорциональна интенсивности излучения накачки. Величина светового сдвига особенно сильна в компактных схемах, использующих эффекты подавления спин-обменного уширения в нулевых полях (SERF), и в ненулевых полях в «вытянутых» состояниях (stretched state). В частности, в наиболее эффективных схемах оптической накачки с уровня (F - 1/2) основного состояния и при опросе уровней (F + 1/2) основного состояния типичные величины светового сдвига излучением накачки (приведенные к значениям магнитного поля) составляют десятки и сотни нТл. Это приводит к необходимости стабилизации интенсивности накачки на уровне 10-6÷10-7, что само по себе является нетривиальной технической задачей.
Включив световой сдвиг в (2), переопределяют Δω:

где
Δω - отстройка частоты, определена выше, под формулой (2)
Ip - интенсивность излучения накачки,
ksh - коэффициент светового сдвига, величина которого практически постоянна при данной ширине резонансной линии и частоте излучения накачки.
Из (2) и (3) следует, что до тех пор, пока изменение интенсивности накачки не начнет деструктивно влиять на чувствительность АМД, можно использовать управление величиной светового сдвига Ip⋅ksh для обнуления сигнала ошибки S(Δω). При этом обратная связь вместо частоты РЧ поля ω будет управлять интенсивностью света накачки IP (фиг. 3). Поскольку зависимость чувствительности АМД от Ip имеет оптимум, в котором производная чувствительности по Ip равна нулю, небольшие (в пределах ±10%) вариации интенсивности относительно оптимального значения не приведут к сколь-либо заметному снижению чувствительности АМД.
Поскольку пространственные и временные вариации магнитного поля в области многоканальной системы в магнитоэкранированном помещении не превышают ±10 нТл, а типичные световые сдвиги линии магнитного резонанса составляют ~10 нТл/мВт, данный способ особенно хорошо применим к высокочувствительным АМД с компактными (менее 1 см3) ячейками. Такие АМД используют интенсивности оптической накачки порядка 10 мВт на датчик, и изменение интенсивности света накачки в них на 10% (т.е. на 1 мВт) позволит уверенно компенсировать временные и пространственные вариации магнитного поля в области многоканальной системы, и при этом приведет к ухудшению чувствительности, не превышающему 2%.
Таким образом, при работе системы МЭГ все АМД работают в общем РЧ поле, частота которого одинакова для всех датчиков, и привязана к средней величине поля в исследуемом объеме (либо напротив - средняя величина поля привязана к частоте РЧ поля).
В отличие от известных решений обнуление сигнала ошибки S(Δω) в каждом датчике и удержание его на центре резонансной линии осуществляется посредством управления интенсивностью света накачки Ip. Величина вариаций магнитного поля определяется по величине вариаций мощности накачки.
Заявленный способ осуществляется следующим образом.
В многоканальной диагностической системе атомарные магнитометрические датчики устанавливают сколь угодно близко друг к другу таким образом, что угол между любыми двумя датчиками не превышает 20°, а их ориентация по отношению к направлению вектора магнитного поля обеспечивает максимальную для данного типа датчиков чувствительность. В частности, для атомарных магнитометров, работающих в двухлучевой схеме (двухлучевых датчиков) это означает, что направление луча накачки ориентировано параллельно магнитному полю, а для атомарных магнитометров, работающих в однолучевой схеме (однолучевых датчиков) направление луча накачки ориентировано под 45° к магнитному полю. Выбор угла между оптическими осями соседних датчиков меньше 20° обусловлен геометрией массива сенсоров, основания которых должны равномерно покрывать поверхность скальпа испытуемого и располагаться как можно ближе. Учитывая естественную кривизну поверхности скальпа и расстояние между сенсорами не превышающее 2 см, угол между осями сенсоров не превысит 20°.
Резонансное лазерное излучение генерируют и, пропуская его последовательно через жидкокристаллический модулятор 9, циркулярный поляризатор 2, и параллельно направлению магнитного поля сквозь рабочую ячейку 3, осуществляют оптическую накачку атомных моментов светом с интенсивностью, обеспечивающей максимальную чувствительность датчика. Резонансное излучение и подстройка при помощи интенсивности оптического излучения обеспечивают максимальную чувствительность в соответствии с формулами (2) и (3) (Е.Б. Александров, А.К. Вершовский. Современные радиооптические методы квантовой магнитометрии. - УФН, 2009, том 179, вып. 6, стр. 605-637).
Во всех датчиках согласовывают фазы прецессии магнитных моментов с помощью общего для всех датчиков направленного перпендикулярно магнитному полю резонансного радиочастотного поля, таким образом, что все атомные моменты прецессируют вокруг направления локального поля с частотой ω, близкой к ларморовской частоте прецессии в данном локальном магнитном поле ω0 и одной и той же фазой, определяемой фазой радиочастотного поля. Генерируют второе лазерное излучение и осуществляют оптическое детектирование сигнала магнитного резонанса, пропуская это излучение через ячейку в направлении, перпендикулярном направлении магнитного поля.
На фотоприемнике детектируют интенсивность прошедшего сквозь ячейку каждого датчика детектирующего излучения и выделяют из результирующего сигнала составляющую, осциллирующую на частоте ларморовской прецессии. Детектируют выделенный сигнал на синхронном детекторе, используя в качестве опорного сигнал РЧ поля, и подбирая фазу синхронного детектирования таким образом, чтобы полученная в результате зависимость напряжения U от частотной отстройки ω-ω0 имела антисимметричную форму, такую, что в центре линии магнитного резонанса U~(ω-ω0); полоса частот синхронного детектирования при этом должна быть не меньше полосы частот многоканальной диагностической системы.
Выделенный сигнал U~(ω-ω0) используют для управления жидкокристаллическим модулятором таким образом, чтобы полный диапазон изменения интенсивности накачки составил ±10%. Измеряют напряжение на входе жидкокристаллического модулятора UM. Подают на датчики калиброванные локальные магнитные поля В, измеряют зависимость напряжения UM(B) и вычисляют линейный коэффициент зависимости при помощи подгонки линейной регрессионной модели методом наименьших квадратов. Пересчитывают измеренную величину UM в величину индукции локального поля в соответствии с полученной на предыдущем шаге линейной регрессионной зависимостью.
Реализация заявляемого способа дает возможность использования общего для всех датчиков резонансного радиочастотного (РЧ) поля, имеющего постоянную частоту, либо привязанного по частоте к магнитному полю, измеряемому одним или несколькими датчиками многоканальной диагностической системы, обеспечивается динамическая компенсация сдвига центра линии магнитного резонанса (возникающего в каждом датчике вследствие вариаций локального поля, и пропорционального этим вариациям), осуществляемой посредством замыкания обратной связи для управления интенсивностью света накачки, и как следствие - величиной светового сдвига линии магнитного резонанса. Измерение величины вариаций магнитного поля производится посредством измерения вариаций мощности накачки; в случае использования низкочастотного (0-100 Гц) модулятора интенсивности (ЖКМ - жидкокристаллического модулятора) измерение величины вариаций магнитного поля производится посредством измерения вариаций сигнала управления ЖКМ. Кроме того, обеспечивает недостижимую ранее возможность работы атомарного магнитометрического датчика (АДМ) в составе многоканальной диагностической системы без создания помех в работе сколь угодно близкорасположенных аналогичных датчиков. Дополнительным преимуществом является возможность использования в каждом АМД недорогого высокочастотного акустооптического модулятора (АОМ), а относительно дешевого жидкокристаллического (ЖК) модулятора, работающего в полосе частот 0÷100 Гц.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОКАНАЛЬНАЯ ДИАГНОСТИЧЕСКАЯ СИСТЕМА | 2019 |
|
RU2720055C1 |
| Квантовый датчик и способы для измерения поперечной компоненты слабого магнитного поля (варианты) | 2020 |
|
RU2733701C1 |
| Флуктуационный оптический магнитометр | 2019 |
|
RU2744814C1 |
| ОПТИЧЕСКИЙ КВАНТОВЫЙ МАГНИТОМЕТР | 2022 |
|
RU2789203C1 |
| Способ измерения компонент магнитного поля | 2020 |
|
RU2737726C1 |
| ПРЕЦИЗИОННЫЙ ТВЕРДОТЕЛЬНЫЙ КВАНТОВЫЙ ГИРОСКОП НЕПРЕРЫВНОГО ДЕЙСТВИЯ НА БАЗЕ СПИНОВОГО АНСАМБЛЯ В АЛМАЗЕ | 2017 |
|
RU2684669C1 |
| Способ настройки частоты радиополя на центр резонансной линии | 1990 |
|
SU1732307A1 |
| САМО ГЕНЕРИРУЮЩИЙ НА ЛАРМОРОВСКОЙ ЧАСТОТЕ КВАНТОВЫЙ МАГНИТОМЕТР С ОПТИЧЕСКОЙ НАКАЧКОЙ | 1971 |
|
SU297321A1 |
| Оптический способ измерения магнитного поля | 2020 |
|
RU2751147C1 |
| ГИРОСКОП НА NV-ЦЕНТРАХ В АЛМАЗЕ | 2016 |
|
RU2661442C2 |

Изобретение относится к области биометрии, а именно к регистрации слабых магнитных полей биологических объектов. Сущность изобретения заключается в возможности использования общего для всех датчиков резонансного радиочастотного (РЧ) поля, имеющего постоянную частоту, либо привязанного по частоте к магнитному полю, измеряемому одним или несколькими датчиками многоканальной диагностической системы, обеспечивается динамическая компенсация сдвига центра линии магнитного резонанса (возникающего в каждом датчике вследствие вариаций локального поля и пропорционального этим вариациям), осуществляемой посредством замыкания обратной связи для управления интенсивностью света накачки, и как следствие - величиной светового сдвига линии магнитного резонанса. Измерение величины вариаций магнитного поля производится посредством измерения вариаций мощности накачки; в случае использования низкочастотного (0-100 Гц) модулятора интенсивности (ЖКМ - жидкокристаллического модулятора) измерение величины вариаций магнитного поля производится посредством измерения вариаций сигнала управления ЖКМ. Технический результат – исключение помех в работе близкорасположенных датчиков. 3 ил.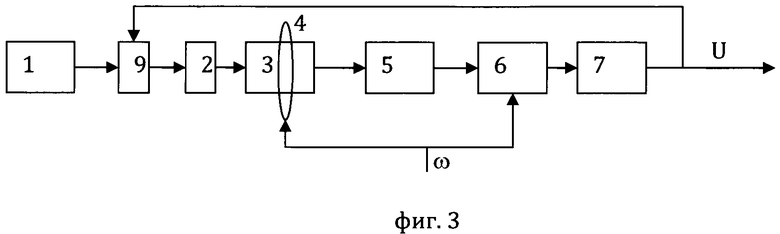
Способ управления атомарным магнитометрическим датчиком при работе в составе многоканальной диагностической системы, заключающийся в том, что устанавливают атомарные магнитометрические датчики в многоканальной диагностической системе таким образом, что угол между любыми двумя датчиками не превышает 20°, а их ориентация по отношению к направлению вектора магнитного поля обеспечивает максимальную для данного типа датчиков чувствительность, генерируют резонансное лазерное излучение и, пропуская его последовательно через жидкокристаллический модулятор, циркулярный поляризатор, и параллельно направлению магнитного поля сквозь рабочую ячейку, осуществляют оптическую накачку атомных моментов светом с интенсивностью, обеспечивающей максимальную чувствительность датчика, согласовывают во всех датчиках фазы прецессии магнитных моментов с помощью общего для всех датчиков направленного перпендикулярно магнитному полю резонансного радиочастотного поля, таким образом, что все атомные моменты прецессируют вокруг направления локального поля с частотой ω, близкой к ларморовской частоте прецессии в данном локальном магнитном поле ω0, и одной и той же фазой, определяемой фазой радиочастотного поля, генерируют второе лазерное излучение и осуществляют оптическое детектирование сигнала магнитного резонанса, пропуская это излучение через рабочую ячейку в направлении, перпендикулярном направлению магнитного поля, детектируют на фотоприемнике интенсивность прошедшего сквозь ячейку каждого датчика детектирующего излучения и выделяют из результирующего сигнала составляющую, осциллирующую на частоте ларморовской прецессии, детектируют выделенный сигнал на синхронном детекторе, используя в качестве опорного сигнал РЧ поля, и подбирая фазу синхронного детектирования таким образом, чтобы полученная в результате зависимость напряжения U от частотной отстройки ω-ω0 имела антисимметричную форму, такую, что в центре линии магнитного резонанса U~(ω-ω0); полоса частот синхронного детектирования при этом должна быть не меньше полосы частот многоканальной диагностической системы, используют выделенный сигнал U~(ω-ω0) для управления жидкокристаллическим модулятором таким образом, чтобы полный диапазон изменения интенсивности накачки составил ±10%, измеряют напряжение на входе жидкокристаллического модулятора UM, подают на датчики калиброванные локальные магнитные поля В, измеряют зависимость напряжения UM(B) и определяют линейный коэффициент зависимости при помощи подгонки линейной регрессионной модели методом наименьших квадратов, пересчитывают измеренную величину UM в величину индукции локального поля в соответствии с полученной на предыдущем шаге линейной регрессионной зависимостью.
| DE 102013004385 A1, 19.09.2013 | |||
| US 9244137 B2, 26.01.2016 | |||
| СПОСОБ КВАНТОВО-ИНТЕРФЕРЕНЦИОННОГО ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ МАГНИТНОГО ПОЛЯ | 2010 |
|
RU2438140C1 |
| САМО ГЕНЕРИРУЮЩИЙ НА ЛАРМОРОВСКОЙ ЧАСТОТЕ КВАНТОВЫЙ МАГНИТОМЕТР С ОПТИЧЕСКОЙ НАКАЧКОЙ | 0 |
|
SU297321A1 |

