Область техники.
Предлагаемый способ относится к измерительной технике квантовых магнитометров и может быть использован для определения компонент остаточного магнитного поля в экранах малогабаритных атомных часов и ядерных гироскопов [Y.-Y Jau, А.В. Post, N.N. Kuzma, A.M. Braun, M.V. Romalis, W. Happer - Phys. Rev. Letters, 11, 110801-1 - 110801-4 (2004)], [B.C. Grover, E. Kanegsberg, J.G. Mark and R.L. Meyer. - U.S. Patent №4157495 (1979)].
Предшествующий уровень техники.
К аналогам предлагаемого способа относятся способы измерения модуля магнитного поля, реализуемые в схемах MZ и МX магнитометров с оптической накачкой [Е.Б. Александров, А.К. Вершовский, Современные радиооптические методы квантовой магнитометрии, УФН, Том 179, №6 стр. 605-637]. В первом варианте использования схемы MZ типа измерение магнитного поля осуществляется путем привязки частоты внешнего радиочастотного генератора к резонансному значению, осуществляемой схемой автоподстройки. Во втором случае возбуждается прецессия намагниченности в оптически ориентированной среде рабочего вещества и фиксируется частота автоколебаний самогенерирующего магнитометра.
Недостатком перечисленных аналогов является их функциональная неспособность к измерению компонент магнитного поля.
К аналогам предлагаемого изобретения относится также способ измерения модуля геомагнитного поля и двух углов отклонения его вектора на основе МX магнитометра с лазерной накачкой [А.К. Вершовский, Проект векторного квантового МX магнитометра с лазерной накачкой, Письма в ЖТФ, том 37, вып. 3, стр. 93-100]. В этом способе используют два циркулярно поляризованных луча LZ и LXУ, ориентированных под углом 90 по отношению друг к другу. При этом направление луча LZ совпадает с направлением измеряемого магнитного поля. Если вектор измеряемого магнитного поля направлен под углом θ к лучу LZ в камере поглощения с рабочим веществом возникает модуляция этого луча на частоте ларморовской прецессии, как это происходит в схемах МX магнитометров. При этом амплитуда сигнала поглощения, фиксируемого вторым лучом LXУ, пропорциональна произведению sin θ ⋅ sin (90° - θ), а его фаза зависит от направления луча LXУ относительно магнитного поля. В сигнале поглощения, фиксируемого лучом LXУ, присутствуют две компоненты, выделяемые схемой детектирования (в виде синхронного детектора), которые содержат информацию о вращении угла θ относительно вектора измеряемого магнитного поля. Принципиальным недостатком этого аналога является его неспособность к измерению компонент магнитного поля, величина которого не превышает ширину линии радиооптического резонанса, (например, остаточных магнитных полей в экранных конструкциях), что требует привлечения нерезонансных методов контроля компонент магнитного поля.
К числу подобных методов принадлежит взятый за прототип способ измерения компонент магнитного поля на эффекте Ханле [Б.А. Андрианов, В.А. Белый, И.Е. Гринько, А.Ф. Лукошин, Квантовый магнитометр для измерения сверхслабых магнитных полей, Геофизическая аппаратура, вып. 57, 1975]. Измерительное устройство, реализующее этот способ измерения компонент магнитного поля (фиг. 1) содержит оптический тракт, на котором последовательно размещены источник накачки 1, циркулярный поляризатор 2, камера поглощения 3 и приемный фотодетектор 4, подключенный к схеме регистрации сигнала поглощения 5, при этом камера поглощения помещена в центр трехкомпонентной системы катушек постоянного магнитного поля 6, подключенных к блоку питания 7, и охвачена радиочастотной катушкой 8, подключенной к звуковому генератору 9, трехкомпонентная система катушек постоянного магнитного поля 6 (образована тремя парами катушек вдоль каждой из осей координат) помещена в магнитный экран 10, а ось радиочастотной катушки 8 ориентирована перпендикулярно оси оптического тракта.
В соответствии со схемой на фиг. 1 измерение компонент остаточного магнитного поля НX, НУ, HZ осуществляется схемой регистрации 5 по сигналу поглощения, при одновременном измерении величины тока в трехкомпонентной системе катушек постоянного магнитного поля 6. В соответствии с работой [J. Dupont-Roc, Determination par des methods optiques des trois compasantes d'un champ magnetique tres faible, Rev. Phys. Appl., 1970, v. 5, №6, p. 853-864] амплитуда сигнала поглощения S в направлении оси 0Z равна величине

где γ - гиромагнитное отношение,  - функция Бесселя, ω1 и ω - соответственно амплитуда и частота радиочастотного поля, Г - релаксационная полуширина резонансной линии.
- функция Бесселя, ω1 и ω - соответственно амплитуда и частота радиочастотного поля, Г - релаксационная полуширина резонансной линии.
Зависимость (1) используется в Ханле магнитометре для градуировки тока компенсации в трехкомпонентной системе катушек постоянного магнитного поля 6, что позволяет по току компенсации измерить составляющие остаточного магнитного поля НX, НУ и HZ.
Недостатком принятого за прототип способа измерения компонент магнитного поля является необходимость градуировки тока в магнитных катушках, которая приводит к измерительным погрешностям, связанным с влиянием не скомпенсированных компонент НX и HZ на форму и амплитуду детектируемого сигнала, описываемого зависимостью (1).
Сущность изобретения.
Целью предлагаемого способа измерения компонент остаточного магнитного поля является повышение точности измерений путем использования комбинированной схемы, предусматривающей как нерезонансный способ фиксирования сигнала поглощения на эффекте Ханле, так и обработку сигнала радиооптического резонанса, индуцируемого в оптически ориентированной среде атомов рабочего вещества вращающимся радиочастотным полем.
Поставленная задача достигается тем, что в известном способе измерения компонент магнитного поля по сигналу поглощения, наблюдаемому в оптически ориентированных атомах при приложении переменного радиочастотного поля и постоянного магнитного поля, создаваемого тремя парами ориентированных перпендикулярно друг к другу компенсационных катушек Z, X, Y (из которых состоит трехкомпонентная система катушек постоянного магнитного поля 6, наименование катушек Z, X, Y соответствует направлению оси катушки вдоль одноименной оси координат), в которых предусмотрена инверсия направления постоянного тока, перпендикулярно оси компенсационной катушки Z, вдоль оси которой ориентирован оптический тракт, с помощью двух пар радиочастотных катушек создается циркулярно поляризованное радиочастотное поле на частотах радиооптического резонанса, фиксируемых при двух противоположных направлениях тока, величина которого подобрана таким образом, чтобы абсолютные значения фиксируемых частот не превышали десятикратной ширины линии радиооптического резонанса, далее:
а) с помощью компенсационных катушек X и Y осуществляется предварительная компенсация X и Y компонент измеряемого поля путем фиксирования минимальной частоты радиооптического резонанса,
б) после выключения радиочастотного поля осуществляется компенсация Z компоненты измеряемого магнитного поля до появления сигнала поглощения на эффекте Ханле и путем корректировки тока в компенсационных катушках X и Y в окрестности его значений, соответствующих ширине линии сигнала поглощения, достигается обнуление этого сигнала,
в) с помощью Z компенсационных катушек осуществляется декомпенсация Z компоненты измеряемого магнитного поля и включается вращающееся радиочастотное поле, частота которого соответствует векторной сумме Z компоненты измеряемого магнитного поля и Z компоненты магнитного поля, создаваемого Z компенсационными катушками, Z компонента измеряемого магнитного поля определяется по полуразности фиксируемых частот радиооптического резонанса (ƒ2б - ƒ1б)/2 (см. фиг. 3б), Z компонента искусственного магнитного поля, создаваемого Z компенсационными катушками, определяется по полусумме фиксируемых частот радиооптического резонанса (ƒ2б+ƒ1б)/2.
г) выключается ток в компенсационных катушках X и измеряется частота радиооптического резонанса, соответствующая величине магнитного поля, вектор которого ориентирован в плоскости ZX, и X компонента измеряемого поля определяется как катет в прямоугольном треугольнике, образованном измеренными значениями магнитного поля вдоль оси Z и суммарным вектором магнитного поля в плоскости ZX,
д) включается ток компенсации в компенсационных катушках X и выключается ток в компенсационных катушках У и измеряется частота радиооптического резонанса, соответствующая величине магнитного поля, вектор которого ориентирован в плоскости ZУ, и У компонента измеряемого поля определяется как катет в прямоугольном треугольнике, образованном измеренными значениями магнитного поля вдоль оси Z и суммарным вектором магнитного поля в плоскости ZУ.
Краткое описание чертежей.
Фиг. 1:
Схема устройства для измерения трех компонент магнитного поля на эффекте Ханле. Фиг. 2:
а) Вращающееся радиочастотное поле в декартовой системе координат,
б) Схема устройства, реализующая предлагаемый способ измерения трех компонент остаточного магнитного поля в магнитном экране.
Фиг. 3:
Последовательность регистрации сигналов поглощения и частоты радиооптического резонанса:
а) форма сигнала поглощения на эффекте Ханле и сигналов радиооптического резонанса в условиях предварительной компенсация X и Y компонент измеряемого поля,
б) форма сигналов радиооптического резонанса в условиях компенсация X и Y компонент измеряемого поля,
в) форма сигнала поглощения на эффекте Ханле и сигнала радиооптического резонанса при выключенном токе в компенсационной катушке X,
г) форма сигнала поглощения на эффекте Ханле и сигнала радиооптического резонанса при выключенном токе в компенсационной катушке У.
Осуществление изобретения.
Измерительное устройство, реализующее предлагаемый способ измерения компонент магнитного поля (фиг. 2б) содержит оптический тракт, на котором последовательно размещены источник накачки 1, циркулярный поляризатор 2, камера поглощения 3 и приемный фото детектор 4, подключенный к схеме регистрации сигнала поглощения 5, при этом камера поглощения помещена в центр трехкомпонентной системы катушек постоянного магнитного поля 6, подключенных к блоку питания 7, и охвачена радиочастотными катушками 8 и 9, оси которых ориентированы под углом 90° по отношению друг к другу и перпендикулярны оси оптического тракта, трехкомпонентная система катушек постоянного магнитного поля 6 помещена в магнитный экран 10, а радиочастотные катушки 8 и 9 соответственно подключены к первому и второму выходу звуковому генератора 11.
Предлагаемый способ измерения компонент магнитного поля с помощью схемы магнитометра на фиг. 2 реализуется следующим образом.
Излучение источника накачки 1, проходит через циркулярный поляризатор 2 и приобретает круговую поляризацию излучения. Далее это излучение накачки поступает в камеру поглощения 3 и осуществляет поляризацию атомов рабочего вещества, в качестве которого могут быть использованы атомы гелия-4, а также изотопы щелочных металлов. С выхода камеры поглощения 3 свет поступает на вход приемного фотодетектора 4, на выходе которого формируется сигнал переменного тока на частоте модуляции магнитного поля, создаваемого вдоль оси Z магнитной системой 6. Этот сигнал поступает в схему регистрации сигнала поглощения 5, которая может работать в двух режимах:
Режим А - регистрации сигнала радиооптического резонанса при использовании этой схемы в составе квантового MZ магнитометра [Е.Б. Александров, А.К. Вершовский, Современные радиооптические методы квантовой магнитометрии, УФН, Том 179, №6 стр. 605-637].
Режим В - регистрации сигнала поглощения на эффекте Ханле при использовании этой схемы в составе Ханле магнитометра [Б.А. Андрианов, В.А. Белый, И.Е. Гринько, А.Ф. Лукошин, Квантовый магнитометр для измерения сверхслабых магнитных полей, Геофизическая аппаратура, вып. 57, 1975].
В режиме А схема регистрации сигнала поглощения 5 осуществляет измерение частоты звукового генератора 11, настроенного на резонансную частоту ларморовской прецессии. При этом, для того, чтобы не допустить насыщение материала экрана 10, величину тока в компенсационных катушках магнитной системы 6 выбирают не выше (пересчитанной в единицах магнитной индукции) десятикратной полуширины резонансной линии Г.
При столь низком значении рабочего магнитного поля и при использовании линейно поляризованного радиочастотного поля в радиочастотной катушке, охватывающую камеру поглощения 3, существует измерительная погрешность определения частоты радиооптического резонанса, обусловленная влиянием нерезонансной компоненты линейно поляризованного радиополя в радиочастотной катушке на сдвиг частоты магнитного резонанса (сдвиг Блоха-Зигерта). В соответствии с [Л.Н. Новиков, Г.В. Скроцкий, Нелинейные и параметрические эффекты в атомной радиоспектроскопии, УФН, 1978, том 125, вып. 3, стр. 449-488] относительная величина этого сдвига пропорциональна отношению [ω1/2ω0]2, где ω1 - выраженная в единицах частоты амплитуда радиополя, ω0 - частота Лармора. Для исключения этой погрешности в заявляемом способе используется вращающееся радиочастотное поле (фиг. 2а), создаваемое радиочастотными катушками 8 и 9, переменное напряжение в которых отличается по фазе на 90°, что позволяет исключить влияние нерезонансной компоненты радиочастотного поля на измерение резонансной частоты. В режиме В звуковой генератор 11 отключен, и схема регистрации 5 осуществляет детектирование сигнала поглощения как это реализуется в схеме Ханле магнитометра.
В режимах работы А и В используется одна и та же модуляционная методика, согласно которой с помощью блока питания 7 в компенсационной Z катушке магнитной системы 6 создается низкочастотное переменное магнитное поле, амплитуда которого выбирается в пределах полуширины резонансной линии Г. При этом прозрачность камеры 3 поглощения будет изменяться синхронно с частотой этого переменного поля, на которую настроена схема регистрации 5.
Процесс измерения компонент остаточного магнитного поля в экране иллюстрируется на фиг. 3 и происходит в следующей последовательности:
а) с помощью компенсационных катушек X и Y осуществляется предварительная компенсация X и Y компонент измеряемого поля путем фиксирования минимальных частот радиооптического резонанса ƒ1a, ƒ2a, соответствующих двум противоположными направлениям постоянного тока в Z катушке магнитной системы 6. При этом сигнал на эффекте Ханле в окрестности нулевого магнитного поля может наблюдается на уровне шумов (фиг. 3а), что является следствием неполной компенсации компонент остаточного магнитного поля НX и НУ,
б) после выключения радиочастотного поля осуществляется компенсация Z компоненты измеряемого магнитного поля до появления сигнала поглощения на эффекте Ханле и путем корректировки тока в компенсационных катушках X и Y в окрестности его значений, соответствующих ширине линии сигнала поглощения, достигается обнуление этого сигнала,
в) с помощью Z компенсационных катушек осуществляется декомпенсация Z компоненты измеряемого магнитного поля и включается вращающееся радиочастотное поле, частота которого соответствует векторной сумме Z компоненты измеряемого магнитного поля и Z компоненты магнитного поля, создаваемого Z компенсационными катушками, Z компонента измеряемого магнитного поля определяется по полуразности фиксируемых частот радиооптического резонанса (ƒ2б-ƒ1б)/2, Z компонента искусственного магнитного поля, создаваемого Z компенсационными катушками, определяется по полусумме фиксируемых частот радиооптического резонанса (ƒ2б+ƒ1б)/2, (фиг. 3б),
г) выключается ток в компенсационных катушках X и измеряется частота радиооптического резонанса ƒ2в, соответствующая величине магнитного поля, вектор которого ориентирован в плоскости ZX, и X компонента измеряемого поля определяется как катет в прямоугольном треугольнике, образованном измеренными значениями магнитного поля вдоль оси Z и суммарным вектором магнитного поля в плоскости ZX (фиг. 3в),
е) включается ток компенсации в компенсационных катушках X, выключается ток в компенсационных катушках У и измеряется частота радиооптического резонанса ƒ2г, соответствующая величине магнитного поля, вектор которого ориентирован в плоскости ZУ, и У компонента измеряемого поля определяется как катет в прямоугольном треугольнике, образованном измеренными значениями магнитного поля вдоль оси Z и суммарным вектором магнитного поля в плоскости ZУ.
Положительный эффект заявляемого способа измерения компонент остаточного магнитного поля в экранных конструкциях заключается в использовании прецизионной методики измерений, основанной на определении частоты радиооптического резонанса в сверхслабых магнитных полях и исключении необходимости проведения градуировки показаний измерительного блока, характерной для измерителей магнитной индукции на эффекте Ханле.
| название | год | авторы | номер документа |
|---|---|---|---|
| Квантовый датчик и способы для измерения поперечной компоненты слабого магнитного поля (варианты) | 2020 |
|
RU2733701C1 |
| Способ измерения координат магнитного диполя | 2023 |
|
RU2815766C1 |
| ОПТИЧЕСКИЙ ВЕКТОРНЫЙ МАГНИТОМЕТР | 2024 |
|
RU2830140C1 |
| ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР И СПОСОБ ИЗМЕРЕНИЯ КОМПОНЕНТ ИНДУКЦИИ МАГНИТНОГО ПОЛЯ ПРИ ПОМОЩИ ВЕКТОРНОЙ КОМПЕНСАЦИИ | 2013 |
|
RU2539726C1 |
| Компонентный электронно-спиновый магнитометр | 1986 |
|
SU1422197A1 |
| СПОСОБ ОПТИЧЕСКОГО ИЗМЕРЕНИЯ ВЕКТОРНОГО МАГНИТНОГО ПОЛЯ | 2024 |
|
RU2829068C1 |
| Компонентный магнитометр | 1979 |
|
SU890283A1 |
| Способ измерения геомагнитного поля на движущихся и вращающихся носителях | 2024 |
|
RU2825539C1 |
| Квантовая магнитометрическая система | 1977 |
|
SU739453A1 |
| ТРЕХКОМПОНЕНТНЫЙ ОПТИЧЕСКИЙ КВАНТОВЫЙ МАГНИТОМЕТР НА АЗОТНО-ВАКАНСИОННЫХ ЦЕНТРАХ ОКРАСКИ В КРИСТАЛЛЕ АЛМАЗА | 2024 |
|
RU2835005C1 |
Изобретение относится к измерительной технике квантовых магнитометров. Способ измерения компонент магнитного поля основан на измерении компонент магнитного поля по сигналу поглощения, наблюдаемому в оптически ориентированных атомах при приложении переменного радиочастотного поля и постоянного магнитного поля, создаваемого тремя парами ориентированных перпендикулярно друг к другу компенсационных катушек, ось каждой из которых расположена вдоль одноименной оси координат, в которых предусмотрена инверсия направления постоянного тока. Технический результат – повышение точности измерений остаточного магнитного поля. 3 ил.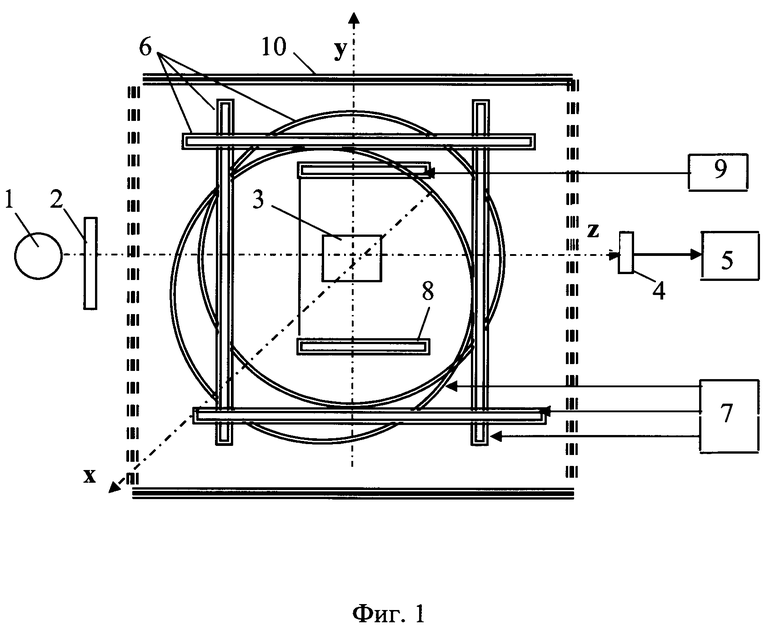
Способ измерения компонент магнитного поля, характеризующийся тем, что по сигналу поглощения, наблюдаемому в оптически ориентированных атомах при приложении переменного радиочастотного поля и постоянного магнитного поля, создаваемого тремя парами ориентированных перпендикулярно друг к другу компенсационных катушек Z, X, Y, ось каждой из которых расположена вдоль одноименной оси координат, в которых предусмотрена инверсия направления постоянного тока, отличающийся тем, что перпендикулярно оси компенсационной катушки Z, вдоль оси которой ориентирован оптический тракт, с помощью двух пар радиочастотных катушек создается циркулярно поляризованное радиочастотное поле на частотах радиооптического резонанса, фиксируемых при двух противоположных направлениях тока, величина которого подобрана таким образом, чтобы абсолютные значения фиксируемых частот не превышали десятикратной ширины линии радиооптического резонанса, далее с помощью компенсационных катушек X и Y осуществляется предварительная компенсация X и Y компонент измеряемого поля путем фиксирования минимальной частоты радиооптического резонанса, затем после выключения радиочастотного поля осуществляется компенсация Z компоненты измеряемого магнитного поля до появления сигнала поглощения на эффекте Ханле и путем корректировки тока в компенсационных катушках X и Y в окрестности его значений, соответствующих ширине линии сигнала поглощения, достигается обнуление этого сигнала, далее с помощью Z компенсационных катушек осуществляется декомпенсация Z компоненты измеряемого магнитного поля и включается вращающееся радиочастотное поле, частота которого соответствует векторной сумме Z компоненты измеряемого магнитного поля и Z компоненты магнитного поля, создаваемого Z компенсационными катушками, Z компонента измеряемого магнитного поля определяется по полуразности фиксируемых частот радиооптического резонанса, Z компонента искусственного магнитного поля, создаваемого Z компенсационными катушками, определяется по полусумме фиксируемых частот радиооптического резонанса, затем выключается ток в компенсационных катушках X и измеряется частота радиооптического резонанса, соответствующая величине магнитного поля, вектор которого ориентирован в плоскости ZX, а X компонента измеряемого поля определяется как катет в прямоугольном треугольнике, образованном измеренными значениями магнитного поля вдоль оси Z и суммарным вектором магнитного поля в плоскости ZX, далее включается ток компенсации в компенсационных катушках X, выключается ток в компенсационных катушках У, и измеряется частота радиооптического резонанса, соответствующая величине магнитного поля, вектор которого ориентирован в плоскости ZУ, а У компонента измеряемого поля определяется как катет в прямоугольном треугольнике, образованном измеренными значениями магнитного поля вдоль оси Z и суммарным вектором магнитного поля в плоскости ZУ.
| Устройство для модуляции частоты колебаний | 1959 |
|
SU127486A1 |
| Трехкомпонентный квантовый магнитометр | 1978 |
|
SU789956A1 |
| Компонентный магнитометр | 1979 |
|
SU890283A1 |
| US 3500176 A1, 10.03.1970. | |||

