Уровень техники
[0001] Многие вычислительные устройства используют сенсорные поверхности, такие как сенсорные панели и сенсорные экраны. Эти сенсорные поверхности могут быть сконфигурированы принимать ввод от инструментального средства ввода (например, пера, стилуса, других объектов ввода и т.д.), а также ввод касанием пользователя (например, ввод пальцем). При использовании инструмента ввода, например, чтобы писать сообщение на сенсорной поверхности, пользователь может случайно касаться сенсорной поверхности (например, класть его или ее ладонь на сенсорную поверхность).
Сущность изобретения
[0002] Это раскрытие описывает технологии для реализации процесса классификации, чтобы оценивать информацию, ассоциированную с вводом от инструмента ввода, такого как перо или стилус, и сенсорным вводом от пользователя, например, пальцем или ладонью руки пользователя, чтобы определять, является ли сенсорный ввод от пользователя намеренным сенсорным вводом или непреднамеренным сенсорным вводом. Оцениваемая информация может быть ассоциирована с поступлением ввода от инструмента ввода относительно поступления сенсорного ввода от пользователя. Оцениваемая информация может также быть ассоциирована с перемещением ввода от инструмента ввода относительно перемещения сенсорного ввода от пользователя.
[0003] В различных реализациях технологии могут вычислять оценочный балл и сравнивать оценочный балл с пороговым значением достоверности классификации. Если достоверная классификация не может быть выполнена, технологии дополнительно выполняют процесс классификации, когда принимается больше информации, ассоциированной с вводами.
[0004] Это краткое изложение сущности изобретения предусмотрена для введения в упрощенной форме подборки концепций, которые дополнительно описываются ниже в подробном описании. Данное краткое изложение сущности изобретения не имеет намерением ни то, чтобы идентифицировать ключевые или важнейшие признаки заявленного изобретения, ни то, чтобы использоваться таким образом, что оно ограничивает объем заявленного изобретения.
Краткое описание чертежей
[0005] Подробное описание излагается со ссылкой на сопровождающие чертежи. На чертежах, самая левая цифра(ы) ссылки с номером идентифицирует чертеж, на котором впервые появляется ссылка с номером. Использование одинаковых ссылочных номеров на различных чертежах указывает аналогичные или идентичные объекты или признаки.
[0006] Фиг. 1 иллюстрирует примерное окружение, в котором устройство может классифицировать сенсорный ввод либо как непреднамеренный сенсорный ввод, либо намеренный сенсорный ввод.
[0007] Фиг. 2 иллюстрирует примерные подробности устройства на фиг. 1.
[0008] Фиг. 3 иллюстрирует примерное сетевое окружение, в котором устройство на фиг. 1 и/или удаленный поставщик (провайдер) услуг может классифицировать сенсорный ввод либо как непреднамеренный сенсорный ввод, либо как намеренный сенсорный ввод.
[0009] Фиг. 4 иллюстрирует примерную схему, которая показывает примерный фактор ввода, ассоциированный с временем между поступлениями вводов, который может быть оценен и взвешен, чтобы классифицировать сенсорный ввод либо как непреднамеренный сенсорный ввод, либо намеренный сенсорный ввод.
[0010] Фиг. 5 иллюстрирует примерную схему, которая показывает другой примерный фактор ввода, ассоциированный с расстоянием между поступлениями вводов, который может быть оценен и взвешен, чтобы классифицировать сенсорный ввод либо как непреднамеренный сенсорный ввод, либо намеренный сенсорный ввод.
[0011] Фиг. 6 иллюстрирует примерную схему, которая показывает другой примерный фактор ввода, ассоциированный с числом (например, группой) вводов, который может быть оценен и взвешен, чтобы классифицировать сенсорный ввод либо как непреднамеренный сенсорный ввод, либо намеренный сенсорный ввод.
[0012] Фиг. 7 иллюстрирует примерную схему, которая показывает другой примерный фактор ввода, ассоциированный с направлением вводов, который может быть оценен и взвешен, чтобы классифицировать сенсорный ввод либо как непреднамеренный сенсорный ввод, либо намеренный сенсорный ввод.
[0013] Фиг. 8 иллюстрирует примерную схему, которая показывает другой примерный фактор ввода, ассоциированный со скоростью вводов, который может быть оценен и взвешен, чтобы классифицировать сенсорный ввод либо как непреднамеренный сенсорный ввод, либо намеренный сенсорный ввод.
[0014] Фиг. 9 иллюстрирует примерную схему, которая показывает другой примерный фактор ввода, ассоциированный с кратковременной продолжительностью вводов, который может быть оценен и взвешен, чтобы классифицировать сенсорный ввод либо как непреднамеренный сенсорный ввод, либо намеренный сенсорный ввод.
[0015] Фиг. 10 иллюстрирует примерный процесс классификации сенсорного ввода либо как непреднамеренного сенсорного ввод, либо как намеренного сенсорного ввода.
[0016] Фиг. 11 иллюстрирует примерный процесс для реализации первого этапа классификации многоэтапной классификации.
[0017] Фиг. 12 иллюстрирует примерный процесс для реализации второго этапа классификации многоэтапной классификации, если первый этап классификации не может достоверно классифицировать сенсорный ввод.
[0018] Фиг. 13 иллюстрирует примерный процесс для реализации третьего этапа классификации многоэтапной классификации, если первый этап классификации и второй этап классификации не имеют возможности достоверно классифицировать сенсорный ввод.
Подробное описание изобретения
[0019] Это описание изобретения описывает технологии для классификации сенсорного ввода (например, контактного прикосновения) либо как непреднамеренного сенсорного ввода, либо намеренного сенсорного ввода. Классификация может происходить, пока пользователь устройства одновременно предоставляет (i) ввод через инструмент ввода, такой как перо, стилус или другой не являющийся пользователем объект (это может называться в данном документе инструментальным вводом), и (ii) ввод через пользователя, например, через палец или ладонь (это может называться в данном документе вводом касанием пользователя).
[0020] В различных реализациях устройство и/или сенсорная поверхность конфигурируется/конфигурируются, чтобы отличать инструментальный ввод от ввода касанием пользователя, так что технологии могут классифицировать ввод касанием пользователя либо как непреднамеренный, либо как намеренный. В некоторых примерах инструмент ввода может быть активным инструментом ввода (например, активным пером), так что он формирует сигнал, который является обнаруживаемым посредством сенсорной поверхности, когда сигнал может быть использован устройством и/или сенсорной поверхностью, чтобы отличать инструментальный ввод от ввода касанием пользователя. Чтобы определять, что инструмент ввода является "активным" инструментом ввода, сенсорная поверхность может обнаруживать фактическое прикосновение активного инструмента ввода на сенсорной поверхности и/или обнаруживать, когда активный инструмент ввода находится в диапазоне сенсорной поверхности (например, располагается в конкретной близости к сенсорной поверхности). Кроме того, сенсорная поверхность может определять, что инструмент ввода является активным инструментом ввода, на основе другого ввода, например, недавнего прикосновения от активного инструмента ввода или недавней операции касания пользователя, чтобы указывать будущее использование активного инструмента ввода.
[0021] Активный инструмент ввода может включать в себя токопроводящий наконечник, датчик, функциональные возможности обработки и/или функциональные возможности хранения. Например, активный инструмент ввода может включать в себя датчик и специализированную интегральную схему (ASIC) или другой компонент, который предоставляет информацию о местоположении и/или давлении прикосновения к сенсорной поверхности. Активный инструмент ввода может также включать в себя кнопки, чтобы инструктировать выполнение операций, такие как кнопка, чтобы стирать контент, кнопка, чтобы выполнять операции щелчка левой или правой кнопкой мыши, и т.д. Активный инструмент ввода может также включать в себя аккумулятор или другой источник питания.
[0022] Дополнительно, в некоторых примерах, характеристики ввода, такие как область и/или давление прикосновения, могут быть проанализированы, чтобы определять, удовлетворяет ли ввод одному или более критериям (например, имеет меньшую чем предварительно определенная область прикосновения, имеет предварительно определенную форму прикосновения, ассоциируется с конкретной величиной давления на сенсорную поверхность и т.д.). Если один или более критериев удовлетворяются, тогда ввод может быть определен как инструментальный ввод вместо ввода касанием пользователя от руки пользователя. Это может предоставлять возможность обнаружения и/или идентификации инструментального ввода для различных типов, не являющихся пользователем объектов, таких как пассивный стилус или пассивное перо (например, перо, которое не формирует обнаруживаемый сигнал).
[0023] Технологии, описанные в данном документе, классифицируют ввод касанием пользователя или сенсорный ввод, отличный от ввода, предоставляемого через инструмент ввода. Например, технологии могут классифицировать сенсорный ввод, обеспечиваемый ладонью руки, как непреднамеренный сенсорный ввод (например, сильной рукой пользователя или пишущей рукой, которая удерживает инструмент ввода). В другом примере технологии могут классифицировать сенсорный ввод, обеспечиваемый "опиранием" пальца, как непреднамеренный сенсорный ввод (например, пользователь может иметь привычку класть или размещать палец на сенсорной поверхности без намерения использовать палец, чтобы обеспечивать полезный ввод). В еще одном примере технологии могут классифицировать сенсорный ввод, обеспечиваемый посредством противоположной, или более слабой, руки, как намеренный сенсорный ввод (например, указательный палец и большой палец противоположной или более слабой руки могут быть использованы, чтобы реализовывать намеренную функцию масштабирования на сенсорной поверхности). Следовательно, технологии, описанные в данном документе, реализуют улучшенную функциональность для устройства в том, что пользователь способен обеспечивать одновременный намеренный ввод на сенсорной поверхности с помощью и (i) инструмента ввода (например, активного пера), и (ii) одного или более пальцев пользователя или большого пальца. Кроме того, любой непреднамеренный сенсорный ввод (например, прикосновение от ладони) может быть проигнорирован или подавлен. Это предоставляет возможность устройству работать более эффективно в том, что ресурсы (например, ресурсы обработки) могут быть сохранены в результате отсутствия необходимости обрабатывать непреднамеренный ввод, или в том, что устройство может выполнять множество действий на основе одновременных вводов. Дополнительно, корректно классифицируя ввод касанием пользователя, устройство и/или сенсорная поверхность могут избегать выполнения вредоносной операции на основе случайного или неумышленного прикосновения.
[0024] В различных реализациях классификация может содержать более одного этапа классификации. Следовательно, технологии могут использовать более одного классификатора, чтобы определять, что ввод касанием пользователя, вероятно, является непреднамеренным сенсорным вводом или намеренным сенсорным вводом. В этих реализациях этап классификации может оценивать различные факторы ввода, где каждый фактор ввода может быть ассоциирован с весовым коэффициентом, представляющим важность фактора ввода и/или влияние на оценочный балл для отдельного этапа классификации. По меньшей мере, в одной реализации, дополнительно обсуждаемой в данном документе, технологии могут использовать первый классификатор, чтобы оценивать первые факторы ввода, ассоциированные с поступлением вводов (например, информацию синхронизации, ассоциированную с поступлением инструментального ввода и сенсорного ввода, позиционную информацию, ассоциированную с поступлением инструментального ввода и сенсорного ввода, число сенсорных вводов, которые поступили в течение порогового периода времени и т.д.). Если технологии не имеют возможности достоверно классифицировать ввод касанием пользователя с помощью первого классификатора, технологии могут использовать второй классификатор, чтобы оценивать вторые факторы ввода. Вторые факторы ввода могут включать в себя один или более первых классификаторов ввода (например, со скорректированными весовыми коэффициентами) и один или более дополнительных факторов ввода, ассоциированных с перемещением вводов (например, информацию о направлении перемещения инструментального ввода и сенсорного ввода, информацию о скорости перемещения инструментального ввода и сенсорного ввода и т.д.) и/или продолжительность сенсорного ввода. Если технологии все еще не имеют возможности достоверно классифицировать ввод касанием пользователя с помощью второго классификатора, технологии могут использовать третий классификатор, где весовые коэффициенты, используемые во втором классификаторе, дополнительно корректируются, так что достоверная классификация является более вероятной.
[0025] С помощью многоэтапного процесса классификации (например, первого классификатора и последующих классификаторов, обсуждаемых в данном документе) технологии могут непрерывно, например, по времени, получать и оценивать информацию, ассоциированную с вводами, когда информация обнаруживается. Таким образом, технологии могут обеспечивать эффективную и достоверную оценку, которая адаптируется, когда собирается дополнительная информация.
[0026] Традиционные устройства и/или сенсорные поверхности автоматически подавляют ввод касанием пользователя, в то время как принимают ввод от активного инструмента ввода. Иначе говоря, оценка ввода касанием пользователя не выполняется, чтобы определять намерения пользователя, и, таким образом, пользователь не может использовать как инструмент ввода, так и ввод касанием пользователя, например, посредством пальца, чтобы обеспечивать одновременный инструментальный ввод и ввод касанием пользователя по сенсорной поверхности. Скорее, если пользователь хочет выполнить операцию касания пальцем или инструкцию касания пальцем, в то же время обеспечивая инструментальный ввод посредством инструмента ввода (например, пишет заметку или сообщение), пользователь должен неудобно размещать инструмент ввода или, по меньшей мере, перемещать инструмент ввода на увеличенное расстояние от сенсорной поверхности и затем выполнять операцию касания пальцем или инструкцию касания пальцем.
[0027] Соответственно, технологии, описанные в данном документе, конфигурируются, чтобы предоставлять пользователю возможность обеспечивать одновременный намеренный ввод, классифицируя ввод касанием пользователя (например, ввод касанием пользователя от пальца) как являющийся либо непреднамеренным сенсорным вводом, либо намеренным сенсорным вводом, в то время как инструмент ввода используется.
[0028] Это краткое введение предоставлено для удобства читателя и не предназначено, ни чтобы ограничивать рамки формулы изобретения, ни предшествующие разделы. Кроме того, технологии, описываемые подробно ниже, могут быть реализованы множеством способов и во множестве контекстов. Примерные реализации и контексты предоставляются со ссылкой на последующие чертежи, которые описываются ниже более подробно. Должно быть понятно, однако, что последующие реализации и контексты являются лишь примерами многих.
[0029] Фиг. 1 иллюстрирует примерное окружение 100, в котором технологии, описанные в данном документе, могут быть реализованы. Окружение 100 включает в себя одно или более устройств 102 (далее в данном документе "устройство 102"), сконфигурированных, чтобы классифицировать ввод касанием пользователя как, вероятно, являющийся либо непреднамеренным сенсорным вводом, либо намеренным сенсорным вводом. Например, устройство 102 может оценивать множество факторов ввода, ассоциированных с инструментальным вводом и/или вводом касанием пользователя, чтобы определять, являются ли отдельные сенсорные вводы, или группы сенсорных вводов, непреднамеренными или намеренными. Если отдельный сенсорный ввод классифицируется как намеренный, тогда устройство 102 может выполнять действие, такое как функция масштабирования, функция панорамирования и т.д. В отличие от этого, если отдельный сенсорный ввод классифицируется как непреднамеренный (т.е., неумышленный, случайный и т.д.), тогда отдельный сенсорный ввод может быть проигнорирован или подавлен, и дополнительное действие может не выполняться устройством 102.
[0030] Устройство 102 может содержать планшетный компьютер, портативный компьютер, настольный компьютер, смартфон, электронное считывающее устройство, устройство электронной книги, мобильный телефон, персональный цифровой помощник (PDA), переносное навигационное устройство, переносное игровое устройство, игровую консоль, часы, переносной мультимедийный проигрыватель или любое другое электронное устройство, которое конфигурируется, чтобы принимать и обрабатывать вводы (например, сенсорные вводы, инструментальные вводы и т.д.). В некоторых случаях устройство 102 может содержать мобильное устройство, тогда как в других случаях устройство 102 может содержать стационарное устройство.
[0031] Устройство 102 может быть оборудовано одним или более процессором(ами) 104, памятью 106, одной или более сенсорными поверхностями 108 (далее в данном документе "сенсорная поверхность 108"). Хотя не иллюстрировано на фиг. 1, устройство 102 может также включать в себя, или быть ассоциировано, с сетевым интерфейсом(-ами), дисплеем(-ями), динамиком(-ами), дополнительным устройством(-ами) ввода или датчиков (например, мышью, клавиатурой, джойстиком, камерой, микрофоном и т.д.) и/или другим элементом(-ами).
[0032] Процессор(ы) 104 может быть единственным блоком обработки или множеством блоков, каждый из которых может включать в себя множество различных блоков обработки. Процессор(ы) 104 может включать в себя микропроцессор, микрокомпьютер, микроконтроллер, цифровой сигнальный процессор, центральный процессор (CPU), графический процессор (GPU) и т.д. Альтернативно, или в дополнение, технологии, описанные в данном документе, могут быть выполнены, по меньшей мере, частично, посредством одного или более аппаратных логических компонентов. Например, и без ограничения, иллюстративные типы аппаратных логических компонентов, которые могут быть использованы, включают в себя программируемую пользователем вентильную матрицу (FPGA), специализированную интегральную схему (ASIC), специализированные стандартные продукты (ASSP), конечный автомат, сложное программируемое логическое устройство (CPLD), другие логические схемы, систему на кристалле (SoC) и/или любые другие устройства, которые обрабатывают сигналы на основе операционных инструкций. Среди других возможностей, процессоры 104 могут быть сконфигурированы, чтобы выбирать и исполнять компьютерно-читаемые инструкции, сохраненные в памяти 106.
[0033] Сенсорная поверхность 108 может содержать любой тип устройства/цифрового преобразователя, сконфигурированного, чтобы обнаруживать сенсорный ввод. Обнаружение может быть основано на емкостном, оптическом или любых других технологиях обнаружения. Сенсорная поверхность 108 может включать в себя тактильный датчик, чтобы обнаруживать касание, давление и/или усилие (области соприкосновения). Альтернативно, или дополнительно, сенсорная поверхность 108 может включать в себя или быть ассоциирована с камерой, микрофоном или другим датчиком (например, инфракрасным датчиком), чтобы обнаруживать приближение или прикосновение объекта. В одном примере сенсорная поверхность 108 содержит устройство/цифровой преобразователь непосредственного касания, такой как сенсорный экран (электронный дисплей), сконфигурированный, чтобы отображать контент. В другом примере сенсорная поверхность 108 содержит устройство/цифровой преобразователь опосредованного касания, такое как сенсорная панель (также известная как сенсорный планшет). Для устройства непосредственного касания (например, сенсорного экрана), местоположение экрана отображения непосредственно ассоциируется с сенсорным вводом на основе того, где пользователь касается экрана. В отличие от этого, для устройства опосредованного касания (например, сенсорной панели), сенсорный ввод может быть должен отображаться или преобразовываться в соответствующее местоположение на экране отображения. Хотя иллюстрируется как включенная в устройство 102, сенсорная поверхность 108 может содержать внешнее устройство, которое соединяется или иначе ассоциируется с устройством 102, такое как монитор с сенсорным экраном.
[0034] Когда обсуждается в данном документе, ввод может содержать, или быть ассоциирован, с физическим прикосновением. Например, инструмент ввода или палец может физически касаться сенсорной поверхности 108 в конкретном месте. Ввод может альтернативно содержать, или быть ассоциирован, с нефизичеким контактом. Например, инструмент ввода или палец может быть определен как находящийся в пределах предварительно определенного и/или обнаруживаемого расстояния от сенсорной поверхности 108, но может фактически не быть в физическом соприкосновении с сенсорной поверхностью 108. Отдельный ввод соответствует непрерывному (например, без прерывания или пропуска в соприкосновении) соприкосновению, обеспечиваемому посредством отдельного объекта ввода. Таким образом, сенсорный ввод от первого пальца является одним прикосновением, в то время как сенсорный ввод от второго пальца является вторым прикосновением. Кроме того, более значительное прикосновение от ладони руки может также считаться отдельным сенсорным вводом, когда не существует прерываний или пропусков.
[0035] Память 106 может включать в себя функциональность программного обеспечения, сконфигурированную как один или более "модулей". Когда используется в данном документе, термин "модуль" предназначен, чтобы представлять примерные разделения программного обеспечения в целях обсуждения, и не предназначен, чтобы представлять какой-либо тип требования или требуемый способ, образ или организацию. Соответственно, в то время как различные "модули" обсуждаются, их функциональность и/или аналогичная функциональность может быть размещена по-разному (например, объединена в меньшее число модулей, разбита на большее число модулей и т.д.). Дополнительно, в то время как некоторые функции и модули описываются в данном документе как реализуемые посредством программного обеспечения и/или микропрограммного обеспечения, исполняемого на процессоре, в других вариантах осуществления, какие-либо или все модули могут быть реализованы в целом или частично посредством аппаратных средств (например, ASIC, специализированного процессора и т.д.), чтобы исполнять описанные функции. В некоторых случаях функции и/или модули реализуются как часть операционной системы. В других случаях функции и/или модули реализуются как часть драйвера устройства (например, драйвера для сенсорной панели 108), микропрограммного обеспечения и т.п.
[0036] Память 106 может включать в себя один или комбинацию компьютерно-читаемых носителей. Компьютерно-читаемые носители могут включать в себя компьютерные носители хранения информации и/или среду передачи данных. Компьютерные носители для хранения информации включают в себя энергозависимые и энергонезависимые, съемные и несъемные носители, реализованные любым способом или технологией хранения такой информации, как компьютерно-читаемые инструкции, структуры данных, программные модули или другие данные. Компьютерные носители хранения информации включают в себя, но не только, память на фазовых переходах (PRAM), статическое оперативное запоминающее устройство (SRAM), динамическое оперативное запоминающее устройство (DRAM), другие типы оперативного запоминающего устройства (RAM), постоянное запоминающее устройство (ROM), электрически стираемое программируемое ROM (EEPROM), флэш-память или другую технологию памяти, постоянное запоминающее устройство на компакт-дисках (CD-ROM), цифровые универсальные диски (DVD) или другое оптическое запоминающее устройство, магнитные кассеты, магнитную ленту, запоминающее устройство на магнитных дисках или другие магнитные запоминающие устройства, или любой другой носитель не для пересылки, который может быть использован, чтобы хранить информацию для осуществления доступа посредством вычислительного устройства.
[0037] В отличие от этого, среда передачи данных может осуществлять компьютерно-читаемые инструкции, структуры данных, программные модули или другие данные в модулированном информационном сигнале, таком как несущая волна, или другом механизме передачи. Как определено в данном документе, компьютерные носители хранения информации не включают в себя среду передачи данных.
[0038] Как иллюстрировано на фиг. 1, память 106 включает в себя модуль 110 классификации. Модуль 110 классификации конфигурируется, чтобы классифицировать ввод касанием пользователя (например, контактное прикосновение) либо как непреднамеренный сенсорный ввод, либо преднамеренный сенсорный ввод. Классификация может происходить, пока пользователь устройства обеспечивает ввод посредством использования инструмента ввода, такого как перо или стилус (например, активное перо). Например, фиг. 1 иллюстрирует, что первая рука 112 пользователя (например, правая рука, которая может быть сильной рукой) удерживает или управляет инструментом 114 ввода, в то время как вторая рука 116 пользователя (например, левая рука, которая может быть более слабой рукой) также обеспечивает сенсорный ввод. Конечно, в некоторых случаях, сильная рука может быть левой рукой, тогда как более слабая рука может быть правой рукой, или пользователь может не иметь сильной руки или слабой руки (например, пользователь умеет одинаково работать обеими руками).
[0039] На фиг. 1 сенсорная поверхность 108 и/или устройство 102 конфигурируется/конфигурируются, чтобы определять, обеспечивает или нет инструмент 114 ввода инструментальный ввод, как показано ссылкой на фиг. 118. Например, инструмент 114 ввода может активно обеспечивать инструментальный ввод, когда пользователь пишет сообщение или выполняет прокрутку по группе фотографий. В то время как инструмент 114 ввода используется и обеспечивает ввод, сенсорная поверхность 108 и/или устройство 102 могут также определять ввод касанием пользователя. В первом примере ввод касанием пользователя может быть ассоциирован с вводом от ладони 120 руки 112, которая управляет инструментом 114 ввода. Во втором примере ввод касанием пользователя может быть ассоциирован с вводом от верхнего фрагмента 122 руки 112, которая управляет инструментом 114 ввода. Эти первые два примера ввода (например, 120 и 122) наиболее вероятно являются непреднамеренным прикосновением, которое может часто случаться в ассоциации с действиями пользователя (например, пользователь может иметь привычку класть пишущую руку на плоскую поверхность, когда пишет сообщение). Понятно в контексте этого документа, что существуют другие примеры обычного непреднамеренного ввода (например, опирание пальца руки 116). В третьем примере ввод касанием пользователя может быть ассоциирован с вводом от пальца(ев) 124 и/или большого пальца 126 другой руки 116. В некоторых случаях эти два вторых примера ввода (например, 124 и 126) могут быть намеренным прикосновением, направленным на инструктирование устройству 102 выполнять конкретное действие (например, функцию масштабирования, функцию панорамирования и т.д.). Хотя два ввода (например, 124 и 126) ассоциируются с намерением пользователя и/или инструкцией выполнять действие, понятно, что больше или меньше двух прикосновений могут быть ассоциированы с намерением пользователя и/или инструкцией выполнять действие.
[0040] Следовательно, сенсорная поверхность 108 конфигурируется, чтобы обнаруживать ввод и формировать сигналы, которые должны быть ретранслированы устройству 102, а модуль 110 классификации конфигурируется, чтобы классифицировать, на основе ретранслированных сигналов, ввод касанием пользователя (например, один из 120, 122, 124 и 126) как являющийся либо непреднамеренным сенсорным вводом (например, 120 или 122), либо намеренным сенсорным вводом (например, 124 и 126). В различных реализациях модуль 110 классификации может использовать множество классификаторов, чтобы определять, что сенсорный ввод, вероятно, является непреднамеренным сенсорным вводом или намеренным сенсорным вводом. Например, первый классификатор может оценивать различные первые факторы ввода и вычислять оценочный балл первого классификатора на основе первого набора весовых коэффициентов, а второй классификатор может оценивать различные вторые факторы ввода, например, включающие в себя, по меньшей мере, один фактор ввода, неоцененный в первом классификаторе, и вычислять оценочный балл второго классификатора на основе второго набора весовых коэффициентов, отличного от первого набора весовых коэффициентов. Оценочные баллы могут быть сравнены с пороговыми значениями достоверности оценки, чтобы гарантировать, что модуль 110 классификации уверен в своей классификации сенсорного ввода либо как непреднамеренного сенсорного ввода, либо намеренного сенсорного ввода.
[0041] В различных реализациях датчики сенсорной поверхности 108 конфигурируются, чтобы сообщать данные о вводе модулю 110 классификации. Например, датчики могут включать в себя логические и другие элементы (например, элемент синхронизации), чтобы определять и устанавливать значение позиционной информации и/или информации синхронизации (например, позицию прикосновения в момент времени). Данные могут сообщаться в реальном времени, или данные могут сообщаться в соответствии с периодическим расписанием сообщения (например, с интервалами в десять миллисекунд, интервалами в двадцать миллисекунд, интервалами в тридцать миллисекунд и т.д.). Данные, сообщенные модулю 110 классификации, могут включать в себя позиционную информацию и/или информацию синхронизации от множества объектов в соприкосновении с сенсорной поверхностью. Как обсуждалось выше, сенсорная поверхность 108 (например, или устройство 102) может быть сконфигурирована, чтобы устранять неоднозначность между инструментальным вводом и вводом касанием пользователя (например, пальца), анализируя различные характеристики прикосновения, такие как размер области прикосновения (например, область прикосновения пальца типично больше области прикосновения пера). Кроме того, сенсорная поверхность 108 (например, или устройство 102) может быть сконфигурирована, чтобы устранять неоднозначность между инструментальным вводом и вводом касанием пользователя, если инструмент ввода активный, так что он способен сообщать сигналы (например, указывающие идентификацию пользователя) сенсорной поверхности 108.
[0042] Фиг. 2 иллюстрирует примерные подробности устройства 102 на фиг. 1. В частности, фиг. 2 иллюстрирует детали одной примерной реализации модуля 110 классификации устройства 102. В этой примерной реализации модуль 110 классификации включает в себя первый классификатор 202 (например, модуль) и один или более последующий классификатор(ы) 204 (например, второй классификатор и третий классификатор).
[0043] В целом, целью первого классификатора 202 может быть выполнение достоверной классификации о том, является ли сенсорный ввод намеренным или непреднамеренным, относительно быстро (например, без задержки или с ограниченной задержкой) на основе доступной информации. Между тем, целью последующего классификатора(ов) 204 может быть выполнение достоверной классификации, когда больше информации в дополнение к той, которая была доступна первому классификатору 202, становится доступной. Как дополнительно обсуждается в данном документе, последующий классификатор(ы) 204 может быть использован, когда первый классификатор 202 не может достоверно классифицировать сенсорный ввод как намеренный или непреднамеренный.
[0044] Первый классификатор 202 и/или последующий классификатор(ы) 204 могут принимать информацию, ассоциированную с вводами (например, инструментальным вводом и/или вводом касанием пользователя) от сенсорной поверхности 108. Первый классификатор 202 может быть сконфигурирован, чтобы оценивать один или более факторов ввода первого классификатора, где каждый фактор ввода первого классификатора имеет ассоциированный весовой коэффициент, как указано по ссылке 206. Факторы ввода первого классификатора включают в себя информацию, ассоциированную с поступлением ввода на сенсорной поверхности 108 (например, первоначальное соприкосновение с сенсорной поверхностью 108). Например, факторы ввода первого классификатора могут быть основаны на одном или более из: информации синхронизации, ассоциированной с поступлением ввода, позиционной информации, ассоциированной с поступлением ввода, и/или числа вводов, которые поступили в конкретной области сенсорной поверхности. Факторы ввода могут быть взвешены, так что отдельным факторам ввода придается большая важность, чем другим, при вычислении оценочного балла. Например, "первый" фактор ввода первого классификатора может иметь весовой коэффициент "0,5", "второй" фактор ввода первого классификатора может иметь весовой коэффициент "0,3", а "третий" фактор ввода первого классификатора может иметь весовой коэффициент "0,2", таким образом, оценочный балл будет вычислен как ноль, единица или десятичное значение где-то между нулем и единицей. Даже если предыдущий пример использует три фактора ввода, понятно в контексте этого документа, что на некоторых этапах классификации менее трех факторов ввода может быть использовано (например, один или два) или более трех факторов ввода может быть использовано (например, четыре, пять, шесть и т.д.). С помощью весовых коэффициентов первый классификатор 202 конфигурируется, чтобы вычислять оценочный балл на основе, по меньшей мере, частично, оценок факторов ввода первого классификатора и сравнивать оценочный балл первого классификатора с пороговым значением достоверности первого классификатора.
[0045] Оценка отдельного фактора ввода может указывать, что сенсорный ввод является, вероятно, одной из двух альтернатив, например, либо намеренным (например, положительный результат, представленный значением "единица"), либо непреднамеренным (например, отрицательный результат, представленный значением "ноль"). С помощью примерных весовых коэффициентов из предыдущего параграфа, если оценки "первого" фактора ввода первого классификатора, имеющего весовой коэффициент "0,5", и "третьего" фактора ввода первого классификатора, имеющего весовой коэффициент "0,2", обе указывают, что сенсорный ввод является, вероятно, намеренным, и оценка "второго" фактора ввода первого классификатора, имеющего весовой коэффициент "0,3", указывает, что сенсорный ввод, вероятно, является непреднамеренным, тогда первый классификатор 202 будет вычислять оценочный балл как "0,7", определяя суммарную величину (например, (0,5*1)+(0,2*1)+(0,3*0)). Если пороговое значение достоверности первого классификатора равно "0,8" для преднамеренного сенсорного ввода, и если пороговое значение достоверности первого классификатора равно "0,2" для непреднамеренного сенсорного ввода, тогда первый классификатор 202 не может выполнять достоверную классификацию (например, оценочный балл "0,7" не больше или равен "0,8", и оценочный балл "0,7" не меньше или равен "0,2".
[0046] Если, на основе сравнения оценочного балла и порогового значения(ий) достоверности первого классификатора, первый классификатор 202 не может достоверно классифицировать сенсорный ввод, модуль 110 классификации может использовать второй классификатор (например, один из последующих классификаторов 204), чтобы предоставлять дополнительную оценку факторов ввода. Поскольку второй классификатор может быть привлечен после первого классификатора, например, в более позднее время, дополнительная информация, касающаяся вводов, вероятно, становится доступной. Эта дополнительная информация часто ассоциируется с перемещением ввода и/или продолжительностью ввода. Следовательно, второй классификатор может быть сконфигурирован, чтобы оценивать один или более вторых факторов ввода, где каждый второй фактор ввода имеет ассоциированный весовой коэффициент, как указано ссылкой 208. Вторые факторы ввода могут включать в себя один или более первых факторов ввода, оцененных посредством первого классификатора. Вторые факторы ввода могут дополнительно включать в себя, по меньшей мере, один новый фактор ввода, неоцененный посредством первого классификатора. Например, новый фактор(ы) ввода может быть использован на основе одного или более из: информации о направлении, ассоциированной с перемещением ввода, информации о скорости, ассоциированной с перемещением ввода, или информации о продолжительности ввода (например, кратковременной длительности, как дополнительно обсуждается в данном документе). Второй классификатор может корректировать весовые коэффициенты, чтобы улучшать классификацию и учитывать один или более новых факторов ввода. Например, весовые коэффициенты, ассоциированные с факторами ввода, используемыми первым классификатором, могут быть уменьшены. С помощью скорректированных весовых коэффициентов, второй классификатор конфигурируется, чтобы вычислять оценочный балл второго классификатора на основе, по меньшей мере, частично, оценок вторых факторов ввода и сравнивать оценочный балл второго классификатора с пороговым значением достоверности второго классификатора.
[0047] Если, на основе сравнения, второй классификатор не может достоверно классифицировать сенсорный ввод, модуль 110 классификации может использовать третий классификатор (например, один из последующих классификаторов 204), чтобы дополнительно оценивать сенсорный ввод. В различных реализациях третий классификатор оценивает те же факторы ввода, оцененные посредством второго классификатора, но дополнительно корректирует весовые коэффициенты, таким образом, достоверный результат классификации является более вероятным.
[0048] В различных реализациях первый классификатор 202 и последующий классификатор(ы) 204 могут анализировать информацию, принятую от сенсорной поверхности 108, в свете контекстной информации, сохраненной в хранилище данных 210 контекстной информации. Например, контекстная информация может включать в себя информацию 212 приложения, относящуюся к программе или приложению 214, которое в настоящий момент, или было недавно, исполняется на устройстве 102. Информация 212 приложения может указывать тип приложения, которое выполняется (например, игровое приложение, приложение обработки текста, приложение электронной почты или любая другая категория приложений), контент, который в настоящее время отображается (например, видеоконтент отображается, элементы пользовательского интерфейса отображаются, и т.д.), контент приложения, с которым выполняется взаимодействие (например, тип управления полем, для которого ввод принимается), и т.п. Для иллюстрации, информация 212 приложения может указывать, что пользователи приложения могут типично использовать конкретный ввод касанием пользователя (например, конкретное число прикосновений, конкретное перемещение прикосновений и т.д.), чтобы предоставлять намеренную инструкцию или команду (например, функцию масштабирования). В некоторых реализациях факторы ввода, выбранные для оценки посредством конкретного классификатора, соответствующие весовые коэффициенты и/или пороговые значения достоверности могут переменным образом определяться частично на основе контекстной информации, сохраненной в базе данных 210 контекстной информации.
[0049] В различных реализациях память 106 устройства 102 может также хранить модуль 216 изучения. Модуль 216 изучения может изучать информацию, относящуюся к взаимодействию пользователя с устройством 102. Например, модуль 216 изучения может изучать характеристики относительно рук пользователя (например, размер кончиков пальцев пользователя, размер ладони и т.д.), привычки пользовательского взаимодействия (например, прикосновение между ладонью и сенсорной поверхностью во время письма, опирание пальцем и т.д.) и т.п. Эта информация о пользователе может быть сохранена в хранилище данных 218 истории пользовательского ввода, и к ней может быть осуществлен доступ, и она может быть использована, чтобы создавать персонализированное взаимодействие с пользователем для сенсорной поверхности 108. Например, первый пользователь может иметь изученные характеристики, отличные от второго пользователя, и устройство может идентифицировать пользователя, так что оно может лучше классифицировать сенсорный ввод на основе изученных характеристик. Например, устройство 102 может идентифицировать пользователя через учетные данные авторизации (например, имя для входа и пароль) или через распознавание или обнаружение активного инструмента ввода, который идентифицирует пользователя. В некоторых реализациях факторы ввода, выбранные для оценки посредством конкретного классификатора, весовые коэффициенты и/или пороговые значения достоверности могут быть по-разному определены на основе информации о пользователе, сохраненной в хранилище данных 218 истории пользовательского ввода.
[0050] Фиг. 3 иллюстрирует примерное окружение 300, где устройство 102 соединяется с поставщиком 302 услуг через одну или более сетей 304. Поставщик 302 услуг может предоставлять одну или более услуг устройству 102. Поставщик 302 услуг может включать в себя одно или более вычислительных устройств, таких как один или более настольных компьютеров, портативных компьютеров, серверов и т.п. Одно или более вычислительных устройств могут быть сконфигурированы в кластер, центр обработки данных, облачное вычислительное окружение или их комбинацию. В одном примере одно или более вычислительных устройств предоставляют облачные вычислительные ресурсы, включающие в себя вычислительные ресурсы, ресурсы хранения и т.п., которые работают удаленно по отношению к устройству 102.
[0051] Поставщик 302 услуг может включать в себя модули, компоненты и/или элементы, аналогичные включенным в устройство 102, за исключением того, что они исполняются и работают удаленно (например, по сети(ям) 304). Например, поставщик 302 услуг может быть оснащен одним или более удаленными процессорами 306 и удаленной памятью 308, которая может включать в себя удаленный модуль 310 классификации, удаленный модуль 312 изучения и/или одно или более удаленное приложение(ия) 314. Удаленный модуль 310 классификации и удаленный модуль 312 изучения поставщика 302 услуг могут предоставлять ресурсы устройству 102 и могут функционировать аналогично, или отлично от, модуля 110 классификации и модуля 216 изучения на устройстве 102.
[0052] Одна или более сетей 304 могут включать в себя любую одну или комбинацию множества различных типов сетей, таких как сотовые сети, беспроводные сети, локальные вычислительные сети (LAN), глобальные вычислительные сети (WAN), персональные вычислительные сети (PAN) и Интернет.
[0053] Фиг. 4 иллюстрирует примерную схему 400, которая показывает примерный фактор ввода, который может быть оценен и взвешен, чтобы содействовать вычислению оценочного балла, используемого, чтобы классифицировать ввод касанием пользователя либо как непреднамеренный сенсорный ввод, либо намеренный сенсорный ввод. Примерный фактор ввода, описанный относительно фиг. 4, включает в себя время 402 между поступлениями. Время 402 между поступлениями может быть оценено посредством одного или более из первого классификатора, второго классификатора и/или третьего классификатора.
[0054] Время 402 между поступлениями является разницей времени (например, абсолютным значением) между (i) временем, когда ввод касанием пользователя поступает или инициируется, например, сенсорный ввод от ладони 404 во время t1, и (ii) временем, когда инструментальный ввод поступает или инициируется, например, ввод от инструмента 406 ввода во время t2. Чтобы определять, указывает ли время 402 между поступлениями, что ввод касанием пользователя (например, 404), вероятно, является непреднамеренным или намеренным, классификатор модуля 110 классификации конфигурируется, чтобы оценивать время между поступлениями относительно порогового времени между поступлениями. Например, непреднамеренный сенсорный ввод от ладони руки и намеренный инструментальный ввод от точки инструмента ввода типично создают соприкосновение с, например, поступают на, сенсорной поверхностью 108 в пороговом интервале времени (например, одна секунда, две секунды и т.д.).
[0055] Соответственно, классификатор модуля 110 классификации определяет время между поступлениями между вводом касанием пользователя и инструментальным вводом и сравнивает время между поступлениями с пороговым временем между поступлениями. Если время между поступлениями меньше порогового времени между поступлениями, тогда оценка фактора времени между поступлениями указывает, что ввод касанием пользователя, вероятно, является непреднамеренным, и результат равен "нулю" (например, пользователь кладет свою ладонь на сенсорную поверхность 108, в то время когда пишет с помощью пера). В отличие от этого, если время между поступлениями больше или равно пороговому времени между поступлениями, тогда оценка фактора времени между поступлениями указывает, что ввод касанием пользователя, вероятно, является намеренным (например, пользователь, вероятно, использует пальцы на непишущей руке, чтобы реализовывать функцию масштабирования, как показано посредством ссылки 408), и результат равен "единице", которая умножается на соответствующий весовой коэффициент, чтобы содействовать оценочному баллу. Ввод касанием пользователя (например, 404) может происходить прежде инструментального ввода (например, 406), как показано на фиг. 4. Альтернативно, инструментальный ввод может происходить перед вводом касанием пользователя.
[0056] Фиг. 5 иллюстрирует примерную схему 500, которая показывает другой примерный фактор ввода, который может быть оценен и взвешен, чтобы содействовать вычислению оценочного балла, используемого, чтобы классифицировать сенсорный ввод либо как непреднамеренный сенсорный ввод, либо намеренный сенсорный ввод. Примерный фактор ввода, описанный относительно фиг. 5, включает в себя расстояние 502 между поступлениями. Расстояние 502 между поступлениями может быть оценено посредством одного или более из первого классификатора, второго классификатора и/или третьего классификатора.
[0057] Расстояние 502 между поступлениями является позиционной разницей (например, абсолютным значением) между (i) позицией, где ввод касанием пользователя поступает или инициируется, например, сенсорный ввод от ладони 504 в позиции p1 (например, это может быть средняя точка большего пространства прикосновения), и (ii) позицией, где инструментальный ввод поступает или инициируется, например, ввод от инструмента 506 ввода в позиции p2. Чтобы определять, указывает ли расстояние 502 между поступлениями, что ввод касанием пользователя (например, 504), вероятно, является намеренным или непреднамеренным, классификатор модуля 110 классификации конфигурируется, чтобы оценивать расстояние между поступлениями относительно порогового расстояния между поступлениями. Например, непреднамеренный сенсорный ввод от ладони руки 504 и ввод от точки инструмента 506 ввода типично создают соприкосновение с, например, поступают, с сенсорной поверхностью 108 в пределах порогового расстояния между поступлениями (например, десять сантиметров, двенадцать сантиметров, пятнадцать сантиметров и т.д.). В качестве примера, пороговое расстояние между поступлениями может быть задано на основе размера сенсорной поверхности (например, такие размерности как высота и ширина) и/или размера руки пользователя.
[0058] Соответственно, классификатор модуля 110 классификации определяет время между поступлениями между вводом касанием пользователя и инструментальным вводом и сравнивает расстояние между поступлениями с пороговым расстоянием между поступлениями. Если расстояние между поступлениями меньше порогового расстояния между поступлениями, тогда оценка фактора расстояния между поступлениями указывает, что ввод касанием пользователя, вероятно, является непреднамеренным, и результат равен "нулю" (например, пользователь кладет свою ладонь на сенсорную поверхность 108, в то время когда пишет с помощью пера). В отличие от этого, если расстояние между поступлениями больше или равно пороговому расстоянию между поступлениями, тогда оценка фактора расстояния между поступлениями указывает, что ввод касанием пользователя, вероятно, является намеренным (например, пользователь, вероятно, использует пальцы на непишущей руке, чтобы реализовывать функцию масштабирования, как показано посредством ссылки 508), и результат равен "единице", которая умножается на соответствующий весовой коэффициент, чтобы содействовать оценочному баллу.
[0059] Фиг. 6 иллюстрирует примерную схему 600, которая показывает другой примерный фактор ввода, который может быть оценен и взвешен, чтобы содействовать вычислению оценочного балла, используемого, чтобы классифицировать сенсорный ввод пользователя либо как непреднамеренный сенсорный ввод, либо намеренный сенсорный ввод. Примерный фактор ввода, описанный относительно фиг. 6, включает в себя сравнение числа (например, концентрации) вводов, выполненных в конкретной секции сенсорной поверхности 108. Число вводов может быть оценено посредством одного или более из первого классификатора, второго классификатора и/или третьего классификатора.
[0060] Такой фактор ввода как число вводов основывается на делении сенсорной поверхности 108, по меньшей мере, на две секции. В различных реализациях один из классификаторов модуля 110 классификации определяет горизонтальную позицию 602 инструмента ввода и делит сенсорную поверхность на первую сторону (например, левую сторону 604, как показано на фиг. 6) на основе горизонтальной позиции 602 и вторую сторону (например, правую сторону 606, как показано на фиг. 6) на основе горизонтальной позиции 602. Пунктирная линия на фиг. 6 показывает деление сенсорной поверхности 108. Классификатор может затем определять число вводов в соответствующих секциях (например, сколько прикосновений существует в секции, или сколько прикосновений "концентрируются" в секции). Например, фиг. 6 иллюстрирует, что левая сторона 604 включает в себя число N пользовательских вводов 608(1) … 608(N), где N - это целое число. Фиг. 6 дополнительно иллюстрирует, что правая сторона 606 включает в себя число M пользовательских вводов 610(1) … 610(M), где M - это также целое число (например, N и M могут быть различным или могут быть одинаковым целым числом). Относительно примера на фиг. 6, вводы, называемые 608(1) … 608(N), помечены как намеренные вводы (например, пользователь намеренно вводит инструкцию масштабирования), а вводы, называемые 610(1) … 610(M), помечены как непреднамеренные вводы (например, пользователь кладет ладонь и/или верхний фрагмент руки на сенсорную поверхность 108, и ввод не является намеренным).
[0061] Как обсуждалось выше, ввод от одного пальца может считаться отдельным вводом, так что если пользователь использует два пальца, будут два ввода, если пользователь использует три пальца, будут три ввода, и т.д. Кроме того, ввод от ладони может считаться отдельным вводом также, если он является непрерывным.
[0062] После определения числа вводов классификатор может сравнивать число вводов в одной секции (например, N на левой стороне 604) с числом вводов в другой секции (например, M на правой стороне 606), чтобы определять соотношение (N:M), например, или наоборот (M:N). Классификатор может затем определять, равно ли соотношение, по меньшей мере (2:1). В различных реализациях, если ввод касанием пользователя (например, 608(1)) оценивается как часть группы, например, если N равно двум или более на фиг. 6, которая имеет, по меньшей мере, вдвое больше вводов (например, соотношение (2:1)) по сравнению с другой группой, например, если M равно одному или менее на фиг. 6, тогда такой фактор ввода как число вводов указывает, что ввод касанием пользователя (например, 608(1)), вероятно, является намеренным, например, и результат равен "единице", которая умножается на соответствующий весовой коэффициент, чтобы способствовать оценочному баллу. Напротив, если ввод касанием пользователя (например, 608(1)) оценивается как часть группы, например, если N=1 на фиг. 6, которая не имеет, по меньшей мере, вдвое больше вводов по сравнению с другой группой, например, если M=1 на фиг. 6, тогда такой фактор ввода как число вводов указывает, что ввод касанием пользователя (например, 608(1)) может быть непреднамеренным, например, и результат этой оценки равен "нулю".
[0063] Фиг. 7 иллюстрирует примерную схему 700, которая показывает другой примерный фактор ввода, который может быть оценен и взвешен, чтобы содействовать вычислению оценочного балла, используемого, чтобы классифицировать сенсорный ввод либо как непреднамеренный сенсорный ввод, либо намеренный сенсорный ввод. Примерный фактор ввода, описываемый относительно фиг. 7, включает в себя направление перемещения ввода. Поскольку информация, касающаяся перемещения ввода, обнаруживается после первоначального касания, в различных реализациях, такой фактор ввода как направление перемещения может быть оценен посредством одного или более из второго классификатора и/или третьего классификатора.
[0064] Направление перемещения ввода может быть определено посредством отслеживания обнаруженной позиции ввода по времени (например, от первой позиции ко второй позиции). Например, фиг. 7 иллюстрирует, что ввод от средства ввода, управляемого правой рукой пользователя, переместился из позиции 702 в позицию 704. Таким образом, направление перемещения инструмента ввода указывается по ссылке 706. Дополнительно, фиг. 7 иллюстрирует, что сенсорный ввод от ладони руки (например, непреднамеренный ввод) переместился из позиции 708 в позицию 710. Таким образом, направление перемещения ладони руки указывается по ссылке 712. Фиг. 7 дополнительно иллюстрирует, что сенсорный ввод от пальца другой руки (например, намеренный ввод) переместился из позиции 714 в позицию 716. Таким образом, направление перемещения пальца указывается по ссылке 718.
[0065] Чтобы оценивать фактор перемещения ввода как указывающий либо непреднамеренный, либо намеренный ввод касанием пользователя, классификатор модуля 110 классификации конфигурируется, чтобы сравнивать направление перемещения ввода касанием пользователя (например, 712 и/или 718) с направлением перемещения инструментального ввода (например, 706), чтобы определять различие. Поскольку непреднамеренный ввод, такой как ввод, обеспечиваемый ладонью, может часто перемещаться по, или близко к, тому же направлению инструмента ввода (например, как показано ссылкой 706 и 712), классификатор может тогда дополнительно сравнивать различие в направлении перемещения (например, между вводом касанием пользователя и инструментальным вводом) с пороговым различием направления (например, конкретным углом, разделяющим два направления, таким как пять градусов или десять градусов). Если дополнительное сравнение определяет, что различие в направлении перемещения меньше порогового различия направления (например, перемещение существует в одинаковом направлении или близком к одинаковому направлению), тогда оценка такого фактора ввода как направление перемещения указывает, что ввод касанием пользователя, вероятно, является непреднамеренным, и результат равен "нулю" (например, пользователь кладет свою ладонь на сенсорную поверхность 108 и перемещает ладонь, когда она/он пишет с помощью пера). Напротив, если различие в направлении перемещения больше или равно пороговому различию направления, тогда оценка такого фактора ввода как направление перемещения указывает, что ввод касанием пользователя, вероятно, является намеренным (например, пользователь, вероятно, использует пальцы на непишущей руке, чтобы реализовывать функцию масштабирования, когда направление перемещения значительно отличается от направления перемещения пера), и результат равен "единице", которая умножается на соответствующий весовой коэффициент, чтобы содействовать оценочному баллу.
[0066] В различных реализациях, когда существует множество вводов касаниями пользователя, классификатор может сравнивать различия в направлении перемещений вводов касаниями пользователя, относительно направления перемещения инструментального ввода, и может определять, какой ввод касанием пользователя имеет направление перемещения, которое ближе к направлению перемещения инструментального ввода (например, 706). Ввод касанием пользователя, определенный как ближайший, может быть определен как непреднамеренный сенсорный ввод (например, направление 712 ближе к направлению 706, когда сравнивается с направлением 718). Это может быть выполнено в дополнение, или как альтернатива, к оценке, основанной на сравнении с пороговым различием направления, обсужденным выше.
[0067] Фиг. 8 иллюстрирует примерную схему 800, которая показывает другой примерный фактор ввода, который может быть оценен и взвешен, чтобы содействовать вычислению оценочного балла, используемого, чтобы классифицировать сенсорный ввод либо как непреднамеренный сенсорный ввод, либо намеренный сенсорный ввод. Примерный фактор ввода, описываемый относительно фиг. 8, включает в себя скорость перемещения ввода. Поскольку информация, касающаяся перемещения ввода, обнаруживается после первоначального прикосновения, в различных реализациях, такой фактор ввода как скорость перемещения может быть оценен посредством одного или более из второго классификатора и/или третьего классификатора.
[0068] Скорость перемещения может быть определена с помощью изменения в позиции (например, расстояния между первой позицией и второй позицией) ввода и продолжительности ввода (например, разницы между первым временем и вторым временем). Таким образом, скорость перемещения может быть вычислена как (Δp/Δt) и может быть представлена сантиметрами в миллисекунду (см/мс). Следовательно, скорость перемещения ввода может также быть определена посредством отслеживания обнаруживаемой позиции ввода по времени.
[0069] Фиг. 8 иллюстрирует, что ввод от инструмента ввода, управляемого правой рукой пользователя, переместился из позиции 802 в позицию 804 (например, 14 сантиметров) и в конкретном периоде времени (например, 500 миллисекунд). Таким образом, скорость перемещения инструмента ввода указывается по ссылке 806. Дополнительно, фиг. 8 иллюстрирует, что сенсорный ввод от ладони руки (например, непреднамеренный ввод) переместился из позиции 808 в позицию 810 в конкретном периоде времени. Таким образом, скорость перемещения ладони руки указывается по ссылке 812. Фиг. 8 дополнительно иллюстрирует, что сенсорный ввод от пальца другой руки (например, намеренный ввод) переместился из позиции 814 в позицию 816 в конкретном периоде времени. Таким образом, скорость перемещения пальца указывается по ссылке 818.
[0070] Чтобы оценивать такой фактор ввода как скорость перемещения как указывающий либо непреднамеренный, либо намеренный ввод касанием пользователя, классификатор модуля 110 классификации конфигурируется, чтобы сравнивать скорость перемещения ввода касанием пользователя (например, 812 и/или 818) со скоростью перемещения инструментального ввода (например, 806), чтобы определять различие в скорости. Поскольку непреднамеренный ввод, такой как ввод, обеспечиваемый ладонью, может часто перемещаться с такой же, или близкой к такой же, скоростью, что и у инструмента ввода, классификатор может сравнивать различие в скорости перемещения с пороговым различием скорости (например, конкретной скоростью, разделяющей два вектора скорости, такой как два сантиметра в сто миллисекунд). Если различие в скорости перемещения меньше порогового различия скорости (например, вводы перемещаются с одинаковым темпом или близко к одинаковому темпу), тогда оценка такого фактора ввода как скорость перемещения указывает, что ввод касанием пользователя, вероятно, является непреднамеренным, и результат равен "нулю" (например, пользователь кладет свою ладонь на сенсорную поверхность 108 и перемещает ладонь с тем же темпом, что и перо, когда она/он пишет с помощью пера). Напротив, если различие в скорости перемещения больше или равно пороговому различию скорости, тогда оценка такого фактора ввода как скорость перемещения указывает, что ввод касанием пользователя, вероятно, является намеренным (например, пользователь, вероятно, использует пальцы на непишущей руке, чтобы реализовывать функцию масштабирования, когда скорость перемещения значительно отличается от скорости перемещения пера), и результат равен "единице", которая умножается на соответствующий весовой коэффициент, чтобы содействовать оценочному баллу.
[0071] В различных реализациях, когда существует множество вводов касаниями пользователя, классификатор может сравнивать различия в скорости перемещений вводов касаниями пользователя, относительно скорости перемещения инструментального ввода, и определять, какой ввод касанием пользователя имеет скорость перемещения, которое ближе к скорости перемещения инструментального ввода (например, 806). Ввод касанием пользователя, определенный как ближайший, может быть определен как непреднамеренный сенсорный ввод (например, 812 ближе к 806, когда сравнивается с 818). Это может быть выполнено в дополнение, или как альтернатива, к оценке, основанной на сравнении с пороговым различием скорости, обсужденным выше.
[0072] Фиг. 9 иллюстрирует примерную схему 900, которая показывает другой примерный фактор ввода, который может быть оценен и взвешен, чтобы содействовать вычислению оценочного балла, используемого, чтобы классифицировать сенсорный ввод либо как непреднамеренный сенсорный ввод, либо намеренный сенсорный ввод. Примерный фактор ввода, описываемый относительно фиг. 9, включает в себя определение того, является ли ввод касанием пользователя частью группы кратковременных сенсорных вводов. Кратковременный сенсорный ввод - это ввод, когда продолжительность прикосновения меньше пороговой продолжительности (например, меньше 200 мс, меньше 500 мс и т.д.). Определение того, является или нет ввод касанием пользователя частью группы кратковременных сенсорных вводов, может быть оценено посредством второго классификатора и/или третьего классификатора.
[0073] Классификатор оценивает этот фактор ввода, сначала определяя, является ли ввод касанием пользователя кратковременным, сравнивая продолжительность сенсорного ввода с пороговой продолжительностью. Затем классификатор может определять число кратковременных вводов касаниями пользователя, которые происходят в течение периода времени (например, двух секунд, пяти секунд, десяти секунд и т.д.). Например, фиг. 9 иллюстрирует, что ладонь руки, которая управляет инструментом ввода, вызвала K кратковременных вводов 902(1) … 902(K), где K - это целое число. После этого, классификатор сравнивает число K с пороговым числом кратковременных вводов, и если число K больше или равно пороговому числу кратковременных вводов (например, трем, пяти, семи, десяти и т.д.), тогда, для отдельных сенсорных вводов (например, 902(1) … 902(K)), которые являются частью группы кратковременных сенсорных вводов, фактор кратковременного ввода указывает, что ввод касанием пользователя, вероятно, является непреднамеренным, например, результат этой оценки равен "нулю" (например, ладонь вызывает последовательность кратковременных прикосновений, когда пользователь пишет сообщение с помощью пера). Напротив, если число K меньше порогового числа кратковременных вводов, тогда, для отдельных сенсорных вводов (например, 902(1) … 902(K)), которые являются частью группы кратковременных сенсорных вводов, оценка фактора кратковременного ввода указывает, что ввод касанием пользователя, вероятно, является намеренным сенсорным вводом, например, и результат равен "единице", которая умножается на соответствующий весовой коэффициент, чтобы содействовать оценочному баллу.
[0074] Фиг. 10-13 иллюстрируют примерные процессы для использования технологий, описанных в данном документе. Для легкости иллюстрации примерные процессы описываются как выполняемые в окружении на фиг. 1, фиг. 2, фиг. 3 или любой комбинации фиг. 1-3. Например, одна или более отдельных операций примерных процессов могут быть выполнены посредством устройства 102 и/или поставщика 302 услуг. Однако, процессы также могут быть выполнены в другом окружении и другими устройствами.
[0075] Примерные процессы иллюстрируются как логические блок-схемы последовательности операций, каждая операция которых представляет последовательность операций, которая может быть реализована в аппаратных средствах, программном обеспечении или их комбинации. В контексте программного обеспечения, операции представляют компьютерно-исполняемые инструкции, сохраненные на одном или более компьютерно-читаемых носителях хранения информации, которые, когда исполняются одним или более процессорами, конфигурируют устройство, чтобы выполнять перечисленные операции. Как правило, компьютерно-исполняемые инструкции включают в себя процедуры, программы, объекты, компоненты, структуры данных и т.п., которые выполняют конкретные функции или реализуют конкретные абстрактные типы данных. Порядок, в котором операции описываются, не предназначается, чтобы истолковываться как ограничение, и любое число описанных операций может быть объединено в любом порядке и/или выполняться параллельно, чтобы реализовывать процесс. Дополнительно, любая из отдельных операций может быть опущена.
[0076] Фиг. 10 иллюстрирует примерный процесс 1000, который классифицирует сенсорный ввод либо как непреднамеренный сенсорным вводом, либо преднамеренный сенсорный ввод. В некоторых примерах классификация происходит, когда инструмент ввода определяется посредством устройства 102 и/или сенсорной поверхности как активный.
[0077] На этапе 1002 модуль 110 классификации принимает информацию, ассоциированную с инструментальным вводом, например, на основе соприкосновения между инструментом ввода и сенсорной поверхностью (например, удаленный модуль 310 классификации может также быть использован относительно обсуждения любой из фиг. 10-13). Информация может быть ассоциирована с поступлением инструментального ввода и/или перемещением инструментального ввода. Модуль 110 классификации, другие компоненты устройства 102 или сенсорная поверхность 108 могут быть сконфигурированы, чтобы устранять неоднозначность между вводом, обеспечиваемым посредством инструмента ввода, и сенсорным вводом, обеспечиваемым пользователем (например, посредством пальцев, ладоней, больших пальцев, фрагментов руки и т.д.), на основе обнаружения сигнала от инструмента ввода и/или различения характеристик между инструментальным вводом и пользовательским вводом.
[0078] На этапе 1004 модуль 110 классификации принимает информацию, ассоциированную с вводом(ами) касанием пользователя, например, на основе соприкосновения между объектом(ами) пользователя (например, пальцами) и сенсорной поверхностью. Как обсуждалось выше, информация может быть ассоциирована с поступлением ввода касанием пользователя и/или перемещением ввода касанием пользователя.
[0079] На этапе 1006 модуль 110 классификации использует классификатор(ы), чтобы определять, является ли отдельный ввод касанием пользователя намеренным или непреднамеренным. Например, модуль 110 классификации может оценивать один или более факторов ввода, описанных выше относительно фиг. 4-9, чтобы определять, является ли ввод касанием пользователя намеренным или ненамеренным.
[0080] В решении 1008 классификация определяет, является ли ввод касанием пользователя намеренным. Если модуль 110 классификации определяет, что ввод касанием пользователя является намеренным ("Да"), тогда процесс переходит к этапу 1010, где устройство 102 обрабатывает ввод касанием пользователя и реализует ответное действие (например, устройство 102 реализует функцию масштабирования в ответ на прием инструкции масштабирования).
[0081] В решении 1008, если модуль 110 классификации определяет, что ввод касанием пользователя является непреднамеренным ("Нет"), тогда процесс переходит к этапу 1012, где устройство 102 игнорирует ввод касанием пользователя.
[0082] Фиг. 11 иллюстрирует примерный процесс 1100, который реализует первый этап классификации многоэтапной классификации. Примерный процесс 1100 может быть реализован в ассоциации с операцией 1006 из примерного процесса 1000 на фиг. 10.
[0083] На этапе 1102 первый классификатор 202 определяет или осуществляет доступ к первым факторам ввода и задает весовые коэффициенты для первых факторов ввода. В различных реализациях факторы ввода первого классификатора включают в себя информацию, ассоциированную с поступлением ввода на сенсорной поверхности 108. В одном примере факторы ввода первого классификатора могут включать в себя фактор времени между поступлениями, обсужденный относительно фиг. 4, и фактор расстояния между поступлениями, обсужденный относительно фиг. 5. В другом примере факторы ввода первого классификатора могут включать в себя фактор времени между поступлениями, фактор расстояния между поступлениями и число (например, концентрацию) вводов, обсужденное относительно фиг. 6.
[0084] На этапе 1104 первый классификатор 202 оценивает принятую информацию, ассоциированную с инструментальным вводом и вводом касанием пользователя, чтобы определять, указывает ли отдельный фактор ввода первого классификатора намеренный сенсорный ввод или непреднамеренный сенсорный ввод. Например, как часть оценки, первый классификатор может определять время между поступлениями и сравнивать определенное время между поступлениями с пороговым временем между поступлениями, как обсуждалось выше относительно фиг. 4. В другом примере, как часть оценки, первый классификатор может определять расстояние между поступлениями и сравнивать определенное расстояние между поступлениями с пороговым расстоянием между поступлениями, как обсуждалось выше относительно фиг. 5. В еще одном примере, как часть оценки, первый классификатор может сравнивать число вводов в первой секции сенсорной поверхности с числом вводов во второй секции сенсорной поверхности, чтобы определять, равно ли соотношение, по меньшей мере, (2:1), как обсуждалось выше относительно фиг. 6.
[0085] На этапе 1106 первый классификатор 202 вычисляет оценочный балл первого классификатора на основе оценок. Первый классификатор использует весовые коэффициенты, чтобы вычислять оценочный балл первого классификатора. Например, фактор времени между поступлениями может быть ассоциирован с первым весовым коэффициентом (например, "0,6"), фактор расстояния между поступлениями может быть ассоциирован со вторым весовым коэффициентом (например, "0,2"), а фактор числа (например, совокупности) соприкосновений может быть ассоциирован с третьим весовым коэффициентом (например, "0,2"), где весовые коэффициенты дают в сумме значение, равное единице, так что оценочный балл первого классификатора будет вычислен равным нулю, единице или десятичному значению где-то между нулем и единицей.
[0086] В решении 1108 первый классификатор 202 определяет, удовлетворяет ли оценочный балл первого классификатора пороговой достоверности первого классификатора. Если ответом на этапе 1108 является "Да", тогда процесс переходит к этапу 1110, где первый классификатор достоверно классифицирует ввод касанием пользователя либо как намеренный сенсорный ввод, либо непреднамеренный сенсорный ввод. Если ответом на этапе 1108 является "Нет", тогда процесс переходит к этапу 1112, где модуль 110 классификации решает использовать следующий классификатор для дополнительного процесса классификации (например, процесс переходит к следующему этапу, например, примерному процессу 1200 на фиг. 12, поскольку первый классификатор был неспособен достоверно классифицировать ввод касанием пользователя).
[0087] В различных реализациях первый классификатор может иметь пороговую достоверность первого классификатора для намеренного ввода (например, "0,79") и другую пороговую достоверность первого классификатора для непреднамеренного ввода (например, "0,41"). Чтобы иллюстрировать первый пример с помощью примерных весовых коэффициентов из этапа 1106, если фактор времени между поступлениями и фактор числа вводов оцениваются, чтобы указывать вероятность того, что ввод касанием пользователя был намеренным, и если фактор расстояния между поступлениями оценивается, чтобы указывать вероятность того, что ввод касанием пользователя был непреднамеренным, тогда оценочный балл первого классификатора будет "0,8" (например, (0,6)*1+(0,2)*1+(0,2)*0). Поскольку вычисленный оценочный балл удовлетворяет (например, больше или равен) пороговой достоверности первого классификатора для намеренного ввода (например, "0,79"), тогда первый классификатор может достоверно классифицировать ввод касанием пользователя как намеренный сенсорный ввод.
[0088] Чтобы иллюстрировать второй пример с помощью примерных коэффициентов с этапа 1106, если фактор времени между поступлениями указывает вероятность, что ввод касанием пользователя был непреднамеренным, и если фактор расстояния между поступлениями и фактор числа вводов оцениваются, чтобы указывать вероятность того, что ввод касанием пользователя был намеренным, тогда оценочный балл первого классификатора будет равен "0,4" (например, (0,6)*0+(0,2)*1+(0,2)*1). Этот вычисленный оценочный балл также удовлетворяет (например, меньше) другой пороговой достоверности первого классификатора для непреднамеренного ввода (например, "0,41"), и, таким образом, первый классификатор может достоверно классифицировать ввод касанием пользователя как непреднамеренный сенсорный ввод.
[0089] Напротив, если оценочный балл первого классификатора попадает между "0,41" и "0,79" (например, пороговыми значениями, используемыми в предшествующих примерах), тогда достоверная классификация не может быть выполнена посредством первого классификатора.
[0090] Как обсуждалось выше, весовые коэффициенты и/или пороговые достоверности могут быть переменным образом заданы, так что они могут быть обучены и/или откорректированы на основе отдельного пользовательского ввода или группы пользовательских вводов (например, более крупного образца совокупности).
[0091] Фиг. 12 иллюстрирует примерный процесс 1200, который реализует второй этап классификации многоэтапной классификации, если первый этап классификации не может достоверно классифицировать сенсорный ввод. Примерный процесс 1200 может быть реализован в ассоциации с операцией 1112 из примерного процесса 1100 на фиг. 11.
[0092] На этапе 1202 второй классификатор (например, один из последующих классификаторов 204) определяет или осуществляет доступ к факторам ввода второго классификатора и задает весовые коэффициенты для факторов ввода второго классификатора. В различных реализациях факторы ввода второго классификатора могут включать в себя один или более факторов ввода первого классификатора. Факторы ввода второго классификатора также включают в себя, по меньшей мере, один новой фактор ввода, основанный на перемещениях ввода. В одном примере факторы ввода второго классификатора могут включать в себя фактор направления, обсужденный выше относительно фиг. 7. В другом примере факторы ввода второго классификатора могут включать в себя фактор скорости, обсужденный выше относительно фиг. 8. В еще одном примере факторы ввода второго классификатора могут включать в себя фактор кратковременной продолжительности, как обсуждалось выше относительно фиг. 9. Таким образом, факторы ввода второго классификатора могут включать в себя различные комбинации факторов ввода, как обсуждалось выше относительно фиг. 4-9. В некоторых примерных сценариях, если фактор ввода первого классификатора также оценивается как фактор ввода второго классификатора, тогда соответствующий весовой коэффициент уменьшается, чтобы уменьшать свою важность и влияние на содействие оценочному баллу второго классификатора. Наоборот, новый фактор ввода (например, фактор различия направления или фактор различия скорости) может иметь большую важность и влияние на содействие оценочному баллу второго классификатора.
[0093] На этапе 1204 второй классификатор оценивает принятую информацию (например, она может включать в себя ранее принятую информацию и новую информацию, принятую после начала или завершения первой классификации в процессе 1100), ассоциированную с инструментальным вводом и вводом касанием пользователя, чтобы определять, указывает ли отдельный фактор ввода второго классификатора намеренный сенсорный ввод или непреднамеренный сенсорный ввод. Например, как часть оценки, второй классификатор может определять различие в направлении и сравнивать определенное различие в направлении с пороговым различием направления, как обсуждалось выше относительно фиг. 7. В другом примере, как часть оценки, второй классификатор может определять различие в скорости и сравнивать определенное различие в скорости с пороговым различием скорости, как обсуждалось выше относительно фиг. 8. В еще одном примере, как часть оценки, второй классификатор может сравнивать число кратковременных вводов с пороговым числом кратковременных вводов, как обсуждалось выше относительно фиг. 9.
[0094] В некоторых случаях второму классификатору моет быть не нужно повторно оценивать фактор ввода, который был оценен посредством первого классификатора, но второй классификатор может корректировать его соответствующий весовой коэффициент, который должен быть использован в вычислении оценочного балла.
[0095] На этапе 1206 второй классификатор вычисляет оценочный балл второго классификатора на основе оценок. Второй классификатор использует весовые коэффициенты, чтобы вычислять оценочный балл второго классификатора. Например, первый весовой коэффициент, ассоциированный с фактором времени между поступлениями может быть равен "0,3", уменьшенным значением по сравнению со значением, используемым в качестве примера в процессе 1100. Продолжая этот пример, второй весовой коэффициент, ассоциированный с фактором расстояния между поступлениями, может быть равен "0,1", также уменьшенным значением по сравнению со значением, используемым в качестве примера в процессе 1100. Продолжая этот пример, весовой коэффициент, ассоциированный с фактором числа вводов, может больше не существовать, поскольку фактор числа вводов может не использоваться вторым классификатором. Идем дальше, третий весовой коэффициент, ассоциированный с фактором направления, может быть равен "0,4", а четвертый весовой коэффициент, ассоциированный с фактором скорости, может быть "0,2" (например, четыре весовых коэффициента снова составляют в сумме единицу). Оценочный балл второго классификатора может быть вычислен аналогично примерам, предоставленным выше, например, умножая результаты оценки (например, ноль, указывающий непреднамеренный ввод, или единицу, указывающую намеренный ввод) на соответствующий весовой коэффициент второго классификатора, и суммируя вклады от каждого из факторов ввода второго классификатора.
[0096] В решении 1208 второй классификатор определяет, удовлетворяет ли оценочный балл второго классификатора пороговой достоверности второго классификатора. Если ответом на этапе 1208 является "Да", тогда процесс переходит к этапу 1210, где второй классификатор достоверно классифицирует ввод касанием пользователя либо как намеренный сенсорный ввод, либо непреднамеренный сенсорный ввод. Если ответом на этапе 1208 является "Нет", тогда процесс переходит к этапу 1212, где модуль 110 классификации решает использовать следующий классификатор для дополнительного процесса классификации (например, процесс переходит к следующему этапу, например, примерному процессу 1300 на фиг. 13, поскольку первый классификатор и второй классификатор, оба были неспособны достоверно классифицировать ввод касанием пользователя).
[0097] Второй классификатор может также иметь пороговую достоверность второго классификатора для намеренного ввода и другую пороговую достоверность второго классификатора для непреднамеренного ввода. Пороговые достоверности второго классификатора могут быть такими же или отличаться от пороговых достоверностей первого классификатора.
[0098] Фиг. 13 иллюстрирует примерный процесс 1300, который реализует третий этап классификации многоэтапной классификации, если первый этап классификации и второй этап классификации не имеют возможности достоверно классифицировать сенсорный ввод. Примерный процесс 1300 может быть реализован в ассоциации с операцией 1212 из примерного процесса 1200 на фиг. 12.
[0099] На этапе 1302 третий классификатор (например, один из последующих классификаторов 204) корректирует весовые коэффициенты, используемые вторым классификатором для факторов ввода второго классификатора. В различных реализациях третий классификатор не привносит какие-либо новые факторы ввода по сравнению с факторами ввода, использованными вторым классификатором. Скорее, третий классификатор увеличивает весовые коэффициенты для факторов ввода, ассоциированных с перемещением (например, фактора направления и/или фактора скорости), и уменьшает весовые коэффициенты для факторов ввода, ассоциированных с поступлением (например, фактора времени между поступлениями и фактора расстояния между поступлениями).
[0100] На этапе 1304 третий классификатор оценивает принятую информацию (например, она может включать в себя ранее принятую информацию и новую информацию, принятую после начала или завершения второй классификации в процессе 1200), ассоциированную с инструментальным вводом и вводом касанием пользователя, чтобы определять, указывает ли отдельный фактор ввода третьего классификатора намеренный сенсорный ввод или непреднамеренный сенсорный ввод. В некоторых случаях третьему классификатору может быть не нужно повторно оценивать фактор ввода, который был оценен посредством первого классификатора или второго классификатора.
[0101] На этапе 1306 третий классификатор вычисляет оценочный балл третьего классификатора на основе оценок. Третий классификатор использует откорректированные весовые коэффициенты, чтобы вычислять оценочный балл третьего классификатора.
[0102] В решении 1308 третий классификатор определяет, удовлетворяет ли оценочный балл третьего классификатора пороговой достоверности третьего классификатора. Если ответом на этапе 1308 является "Да", тогда процесс переходит к этапу 1310, где третий классификатор достоверно классифицирует ввод касанием пользователя либо как намеренный сенсорный ввод, либо непреднамеренный сенсорный ввод. Если ответом на этапе 1308 является "Нет", тогда процесс переходит к этапу 1312, где модуль 110 классификации определяет, что классификация является неокончательной, и реализует режим обработки по умолчанию относительно ввода касанием пользователя (например, автоматически подавляет ввод касанием пользователя, предоставляет уведомление пользователю, указывающее неклассифицированный сенсорный ввод и т.д.).
[0103] Третий классификатор может также иметь пороговую достоверность третьего классификатора для намеренного ввода и другую пороговую достоверность третьего классификатора для непреднамеренного ввода. Пороговые достоверности третьего классификатора могут быть такими же или отличаться от пороговых достоверностей первого или второго классификатора.
Заключение
[0104] Хотя примеры и/или реализации были описаны на языке, характерном для структурных признаков и/или методологических действий, должно быть понятно, что изобретение обязательно не ограничивается конкретными описанными признаками или действиями. Скорее, конкретные признаки и действия раскрываются в данном документе в качестве иллюстративных форм реализации примеров и/или реализаций.
Примерные пункты
[0105] Пример A, система (например, устройство 102), содержащая:
сенсорную поверхность, сконфигурированную, чтобы принимать множество вводов, включающих в себя, по меньшей мере, инструментальный ввод, ассоциированный с инструментом ввода, и ввод касанием пользователя; один или более процессоров, связанных с возможностью обмена данными с сенсорной поверхностью; память, связанную с возможностью обмена данными с одним или более процессорами; модуль классификации, сохраненный в памяти исполняемый посредством одного или более процессоров, чтобы: реализовать первый классификатор, чтобы оценивать информацию, ассоциированную с инструментальным вводом и вводом касанием пользователя, чтобы определять, является ли ввод касанием пользователя намеренным сенсорным вводом или непреднамеренным сенсорным вводом, при этом оцениваемая информация ассоциируется с поступлением инструментального ввода относительно поступления ввода касанием пользователя; и в ответ на неспособность первого классификатора определять, является ли ввод касанием пользователя намеренным сенсорным вводом или непреднамеренным сенсорным вводом, реализовать, по меньшей мере, один последующий классификатор, чтобы оценивать дополнительную информацию, чтобы определять, является ли ввод касанием пользователя намеренным сенсорным вводом или непреднамеренным сенсорным вводом, при этом дополнительная оцениваемая информация ассоциируется с перемещением инструментального ввода относительно перемещения ввода касанием пользователя.
[0106] Пример B, система из примера A, в которой: инструмент ввода содержит одно из активного пера или активного стилуса, сконфигурированного, чтобы формировать сигнал, который является обнаруживаемым посредством сенсорной поверхности, и который является используемым сенсорной поверхностью, чтобы различать между инструментальным вводом и вводом касанием пользователя; и ввод касанием пользователя основывается на прикосновении от пальца или ладони руки пользователя.
[0107] Пример C, система из примера A или примера B, в которой первый классификатор оценивает информацию, чтобы определять время между поступлениями между временем, когда инструментальный ввод поступает на сенсорной поверхности, и временем, когда ввод касанием пользователя поступает на сенсорной поверхности.
[0108] Пример D, система из примера C, в которой: если время между поступлениями меньше порогового времени между поступлениями, тогда, по меньшей мере, часть оценки первого классификатора указывает, что ввод касанием пользователя является непреднамеренным сенсорным вводом; а если время между поступлениями больше или равно пороговому времени между поступлениями, тогда, по меньшей мере, часть оценки первого классификатора указывает, что ввод касанием пользователя является намеренным сенсорным вводом.
[0109] Пример E, система из любого примера из примеров A-D, в которой первый классификатор оценивает информацию, чтобы определять расстояние между поступлениями между позицией, где инструментальный ввод поступает на сенсорной поверхности, и позицией, где ввод касанием пользователя поступает на сенсорной поверхности.
[0110] Пример F, система из примера E, в которой: если расстояние между поступлениями меньше порогового расстояния между поступлениями, тогда, по меньшей мере, часть оценки первого классификатора указывает, что ввод касанием пользователя является непреднамеренным сенсорным вводом; а если расстояние между поступлениями больше или равно пороговому расстоянию между поступлениями, тогда, по меньшей мере, часть оценки первого классификатора указывает, что ввод касанием пользователя является намеренным сенсорным вводом.
[0111] Пример G, система из любого примера из примеров A-F, в которой, по меньшей мере, один последующий классификатор оценивает дополнительную информацию, чтобы определять различие между направлением перемещения инструментального ввода и направлением перемещения ввода касанием пользователя.
[0112] Пример H, система из примера G, в которой: если различие меньше порогового различия направления, тогда, по меньшей мере, часть оценки, по меньшей мере, одного последующего классификатора указывает, что ввод касанием пользователя является непреднамеренным сенсорным вводом; а если различие больше или равно пороговому различию направления, тогда, по меньшей мере, часть оценки, по меньшей мере, одного последующего классификатора указывает, что ввод касанием пользователя является намеренным сенсорным вводом.
[0113] Пример I, система из любого примера из примеров A-H, в которой, по меньшей мере, один последующий классификатор оценивает дополнительную информацию, чтобы определять различие между скоростью перемещения инструментального ввода и скоростью перемещения ввода касанием пользователя.
[0114] Пример J, система из примера I, в которой: если различие меньше порогового различия скорости, тогда, по меньшей мере, часть оценки, по меньшей мере, одного последующего классификатора указывает, что ввод касанием пользователя является непреднамеренным сенсорным вводом; а если различие больше или равно пороговому различию скорости, тогда, по меньшей мере, часть оценки, по меньшей мере, одного последующего классификатора указывает, что ввод касанием пользователя является намеренным сенсорным вводом.
[0115] В то время как примеры A-J описываются выше относительно системы, понятно в контексте этого документа, что содержимое примеров A-J может также быть реализовано как способ и/или через один или более компьютерных носителей хранения, хранящих компьютерно-исполняемые инструкции.
[0116] Пример K, способ, содержащий:
определение того, что первый ввод из множества вводов, одновременно принимаемых на сенсорной поверхности, ассоциируется с активным инструментом ввода;
определение того, что, по меньшей мере, второй ввод из множества вводов ассоциируется с касанием пользователя; и оценку, посредством одного или более процессоров, по меньшей мере, одного фактора, ассоциированного с первым вводом и вторым вводом, чтобы классифицировать второй ввод как намеренный сенсорный ввод или непреднамеренный сенсорный ввод.
[0117] Пример L, способ из примера K, в котором, по меньшей мере, один фактор содержит, по меньшей мере, один первый фактор, который ассоциируется с поступлением первого ввода относительно поступления второго ввода, и способ дополнительно содержит: вычисление оценочного балла на основе, по меньшей мере, частично, оценки, по меньшей мере, одного первого фактора; сравнение оценочного балла, по меньшей мере, с одной пороговой достоверностью; если, на основе сравнения, оценочный балл удовлетворяет, по меньшей мере, одной пороговой достоверности, классификацию второго ввода как намеренного сенсорного ввода или непреднамеренного сенсорного ввода; и если, на основе сравнения, оценочному баллу не удается удовлетворять, по меньшей мере, одной пороговой достоверности, оценивают, по меньшей мере, один второй фактор, ассоциированный с первым вводом и вторым вводом, по меньшей мере, один второй фактор ассоциируется с перемещением первого ввода относительно перемещения второго ввода.
[0118] Пример M, способ из примера K или примера L, в котором, по меньшей мере, один фактор ассоциируется с определением расстояния между поступлениями между позицией, где первый ввод поступает на сенсорной поверхности, и позицией, где второй ввод поступает на сенсорной поверхности.
[0119] Пример N, способ из любого примера из примеров K-M, в котором, по меньшей мере, один фактор ассоциируется с определением интервала между поступлениями между временем, когда первый ввод поступает на сенсорной поверхности, и временем, когда второй ввод поступает на сенсорной поверхности.
[0120] Пример O, способ из любого примера из примеров K-N, в котором, по меньшей мере, один фактор ассоциируется с определением различия между направлением перемещения первого ввода и направлением перемещения второго ввода.
[0121] Пример P, способ из любого примера из примеров K-O, в котором, по меньшей мере, один фактор ассоциируется с определением различия между скоростью перемещения первого ввода и скоростью перемещения второго ввода.
[0122] Пример Q, способ из любого примера из примеров K-P, в котором, по меньшей мере, один фактор ассоциируется с первым определением первого числа вводов в первой секции сенсорной поверхности относительно второго определения второго числа вводов во второй секции сенсорной поверхности.
[0123] Пример R, способ из любого примера из примеров K-Q, в котором, по меньшей мере, один фактор ассоциируется с определением числа кратковременных вводов.
[0124] Примеры S, способ из любого примера из примеров K-R, в котором: инструмент ввода содержит одно из активного пера или активного стилуса, сконфигурированного, чтобы формировать сигнал, который является обнаруживаемым посредством сенсорной поверхности, и который является используемым сенсорной поверхностью, чтобы различать между первым вводом и вторым вводом; и второй ввод основывается на прикосновении от пальца или ладони руки пользователя.
[0125] В то время как примеры K-S описываются выше относительно способа, понятно в контексте этого документа, что содержимое примеров K-S может также быть реализовано как система (например, устройство) и/или через один или более компьютерных носителей хранения, хранящих компьютерно-исполняемые инструкции.
[0126] Пример T, один или более компьютерных носителей хранения информации, хранящих компьютерно-читаемые инструкции, которые, когда исполняются посредством одного или более процессоров, конфигурируют устройство, чтобы выполнять операции, содержащие: реализацию первого классификатора, чтобы оценивать множество факторов первого классификатора, ассоциированных с инструментальным вводом и сенсорным вводом, множество факторов первого классификатора должны классифицировать сенсорный ввод как намеренный сенсорный ввод или непреднамеренный сенсорный ввод, при этом каждый фактор первого классификатора из множества факторов первого классификатора имеет соответствующий весовой коэффициент, чтобы вычислять оценочный балл; определение, на основе, по меньшей мере, частично, оценочного балла, что первый классификатор не может достоверно классифицировать сенсорный ввод либо как намеренный сенсорный ввод, либо непреднамеренный сенсорный ввод; и реализацию последующего классификатора, чтобы оценивать множество факторов второго классификатора, ассоциированных с инструментальным вводом и сенсорным вводом, при этом множество факторов второго классификатора включают в себя, по меньшей мере, один фактор первого классификатора с соответствующим весовым коэффициентом, скорректированным, чтобы уменьшать влияние оценочного балла, по меньшей мере, одного фактора первого классификатора во время реализации последующего классификатора.
[0127] Пример U, один или более компьютерных носителей хранения информации из примера T, при этом: один или более факторов первого классификатора из множества факторов первого классификатора основываются, по меньшей мере, частично, на поступлении инструментального ввода относительно поступления сенсорного ввода; один или более факторов второго классификатора из множества факторов второго классификатора основываются, по меньшей мере, частично, на перемещении инструментального ввода относительно перемещения сенсорного ввода; и соответствующие весовые коэффициенты задаются на основе, по меньшей мере, частично, изученной информации пользовательского ввода.
[0128] Пример V, один или более компьютерных носителей хранения информации из примера T или примера U, при этом: инструмент ввода содержит одно из активного пера или активного стилуса, сконфигурированного, чтобы формировать сигнал, который является обнаруживаемым посредством сенсорной поверхности, и который является используемым сенсорной поверхностью, чтобы различать между инструментальным вводом и сенсорным вводом; и сенсорный ввод основывается на прикосновении от пальца или ладони руки пользователя.
[0129] В то время как примеры T-V описываются выше относительно одного или более компьютерных носителей хранения, понятно в контексте этого документа, что содержимое примеров T-V может также быть реализовано как система (например, устройство) и/или способ.
[0130] Пример W, система (например, устройство 102), содержащая: средство для приема множества вводов, включающих в себя, по меньшей мере, инструментальный ввод, ассоциированный с инструментом ввода, и ввод касанием пользователя; средство для оценки информации, ассоциированной с инструментальным вводом и вводом касанием пользователя, чтобы определять, является ли ввод касанием пользователя намеренным сенсорным вводом или непреднамеренным сенсорным вводом, при этом оцениваемая информация ассоциируется с поступлением инструментального ввода относительно поступления ввода касанием пользователя; и в ответ на то, что средство неспособно определять, является ли ввод касанием пользователя намеренным сенсорным вводом, или непреднамеренным сенсорным вводом, на основе оцененной информации, средство для оценки дополнительной информации, чтобы определять, является ли ввод касанием пользователя намеренным сенсорным вводом или непреднамеренным сенсорным вводом, при этом дополнительная оцениваемая информация ассоциируется с перемещением инструментального ввода относительно перемещения ввода касанием пользователя.
[0131] Пример X, система из примера W, в которой: инструмент ввода содержит одно из активного пера или активного стилуса, сконфигурированного, чтобы формировать сигнал, который является обнаруживаемым посредством сенсорной поверхности, и который является используемым сенсорной поверхностью, чтобы различать между инструментальным вводом и вводом касанием пользователя; и ввод касанием пользователя основывается на прикосновении от пальца или ладони руки пользователя.
[0132] Пример Y, система из примера W или примера X, в которой средство оценивает информацию, чтобы определять время между поступлениями между временем, когда инструментальный ввод поступает на сенсорной поверхности, и временем, когда ввод касанием пользователя поступает на сенсорной поверхности.
[0133] Пример Z, система из примера Y, в которой: если время между поступлениями меньше порогового времени между поступлениями, тогда, по меньшей мере, часть оценки указывает, что ввод касанием пользователя является непреднамеренным сенсорным вводом; а если время между поступлениями больше или равно пороговому времени между поступлениями, тогда, по меньшей мере, часть оценки указывает, что ввод касанием пользователя является намеренным сенсорным вводом.
[0134] Пример AA, система из любого примера из примеров W-Z, в которой средство оценивает информацию, чтобы определять расстояние между поступлениями между позицией, где инструментальный ввод поступает на сенсорной поверхности, и позицией, где ввод касанием пользователя поступает на сенсорной поверхности.
[0135] Пример BB, система из примера AA, в которой: если расстояние между поступлениями меньше порогового расстояния между поступлениями, тогда, по меньшей мере, часть оценки указывает, что ввод касанием пользователя является непреднамеренным сенсорным вводом; а если расстояние между поступлениями больше или равно пороговому расстоянию между поступлениями, тогда, по меньшей мере, часть оценки указывает, что ввод касанием пользователя является намеренным сенсорным вводом.
[0136] Пример CC, система из любого примера из примеров W-BB, в которой средство оценивает дополнительную информацию, чтобы определять различие между направлением перемещения инструментального ввода и направлением перемещения ввода касанием пользователя.
[0137] Пример DD, система из примера CC, в которой: если различие меньше порогового различия направления, тогда, по меньшей мере, часть оценки указывает, что ввод касанием пользователя является непреднамеренным сенсорным вводом; а если различие больше или равно пороговому различию направления, тогда, по меньшей мере, часть оценки указывает, что ввод касанием пользователя является намеренным сенсорным вводом.
[0138] Пример EE, система из любого примера из примеров W-DD, в которой средство оценивает дополнительную информацию, чтобы определять различие между скоростью перемещения инструментального ввода и скоростью перемещения ввода касанием пользователя.
[0139] Пример FF, система из примера EE, в которой: если различие меньше порогового различия скорости, тогда, по меньшей мере, часть оценки указывает, что ввод касанием пользователя является непреднамеренным сенсорным вводом; а если различие больше или равно пороговому различию скорости, тогда, по меньшей мере, часть оценки указывает, что ввод касанием пользователя является намеренным сенсорным вводом.
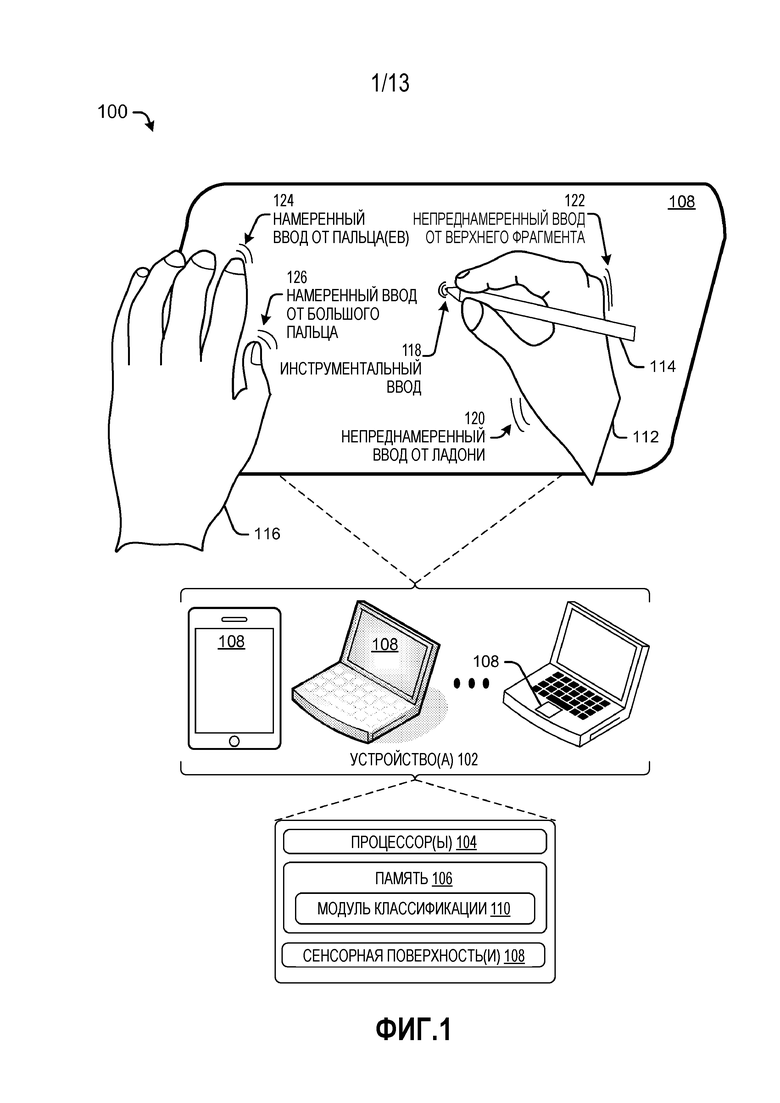
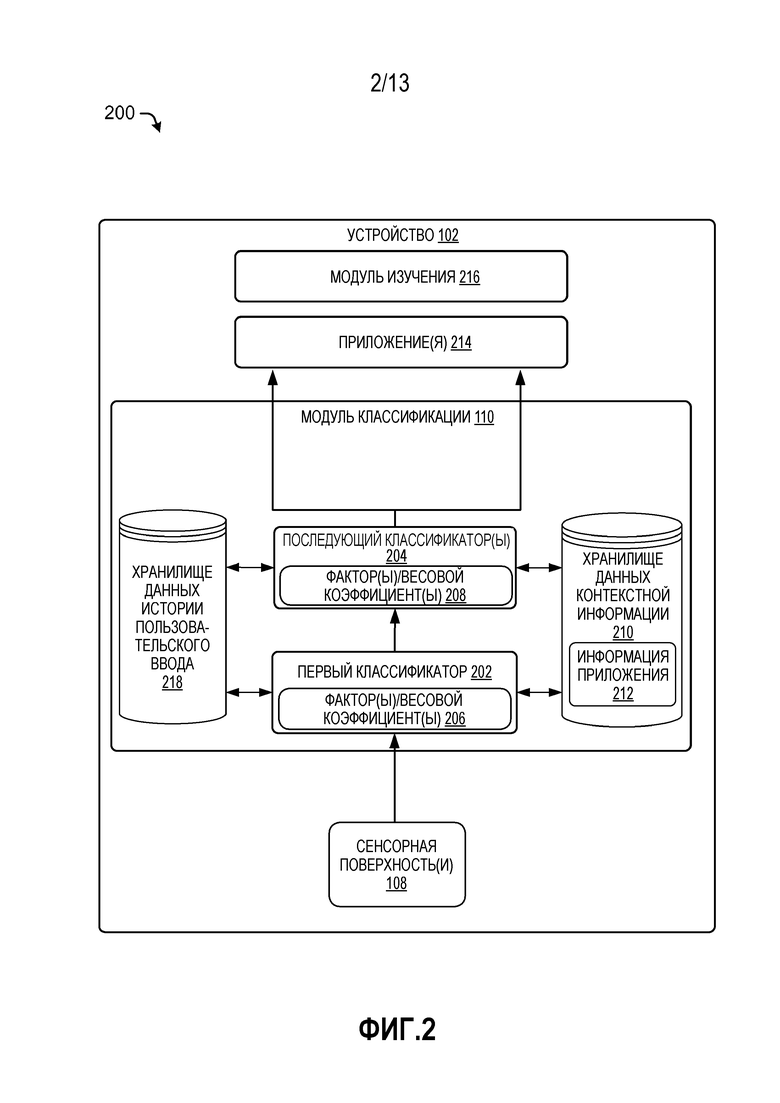
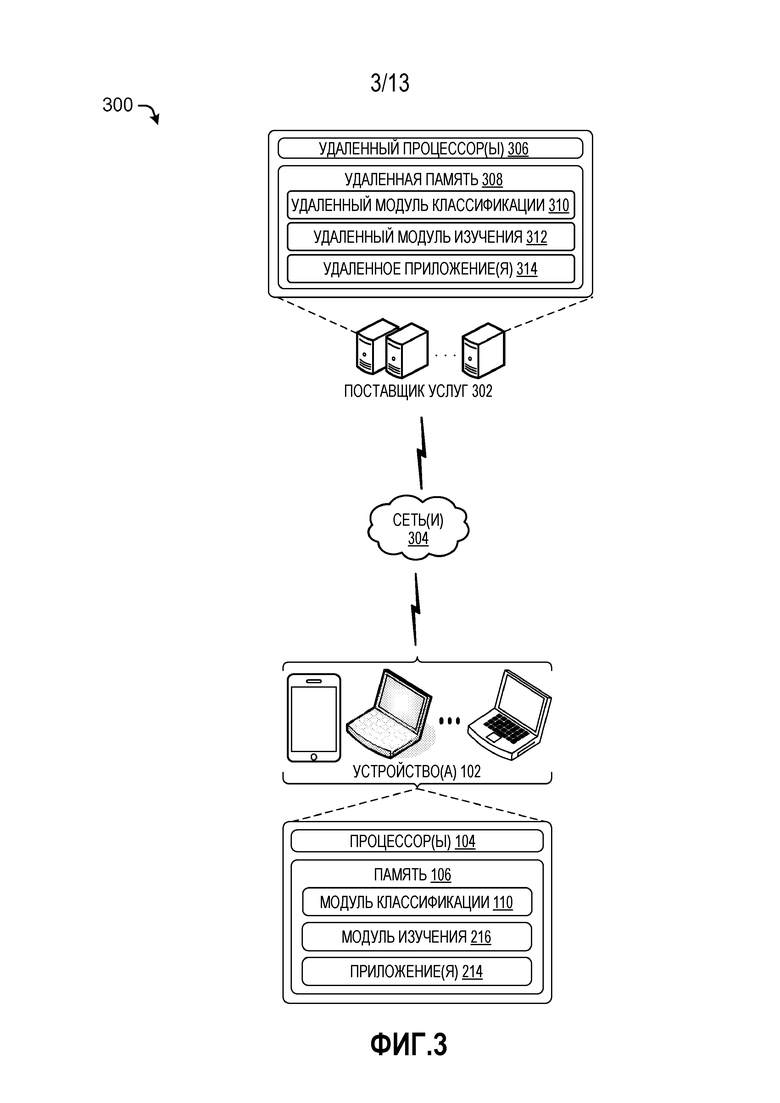
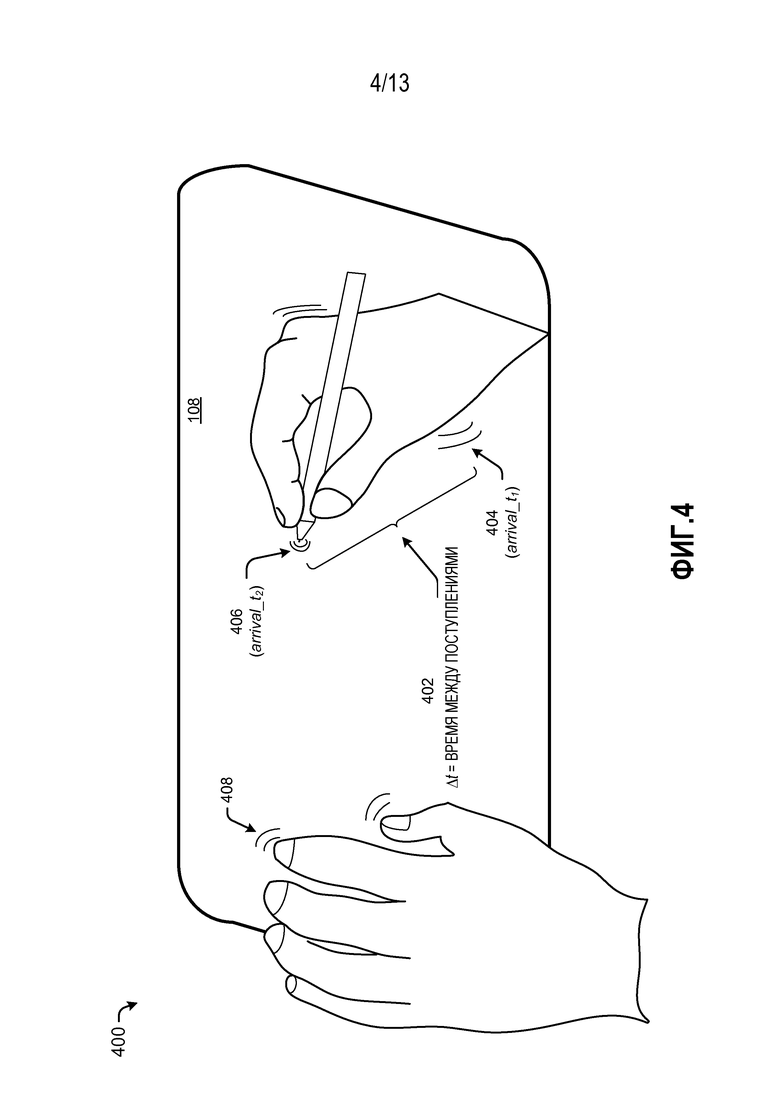
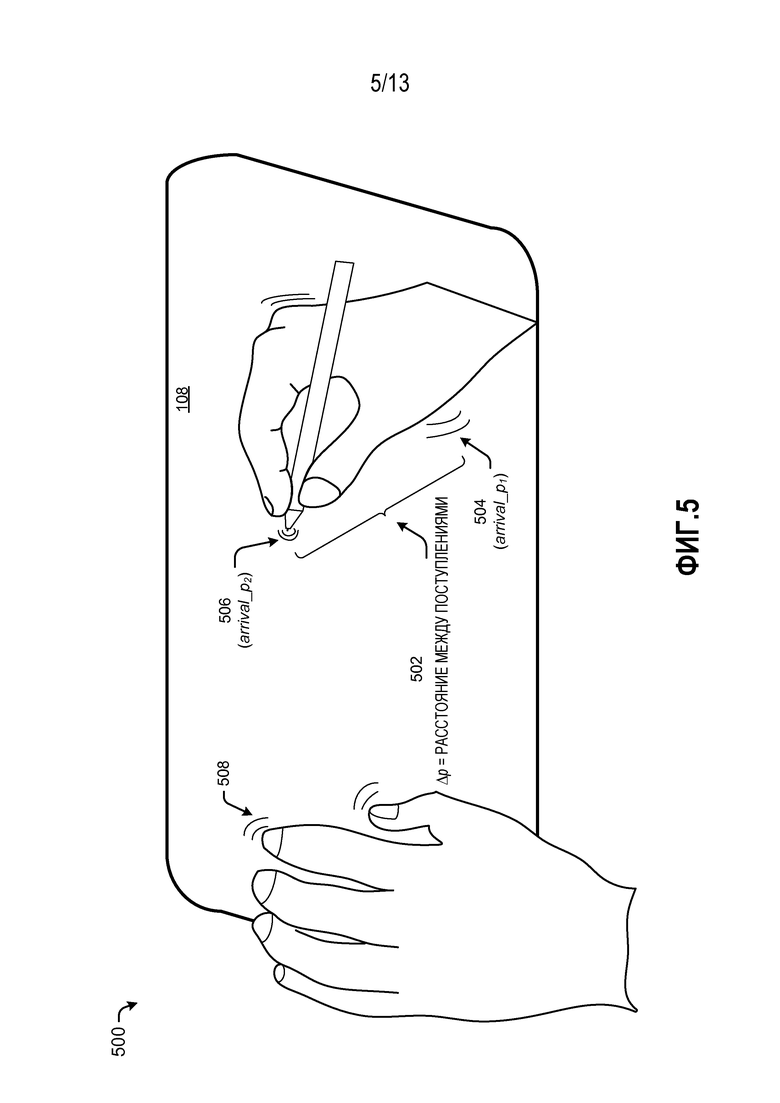
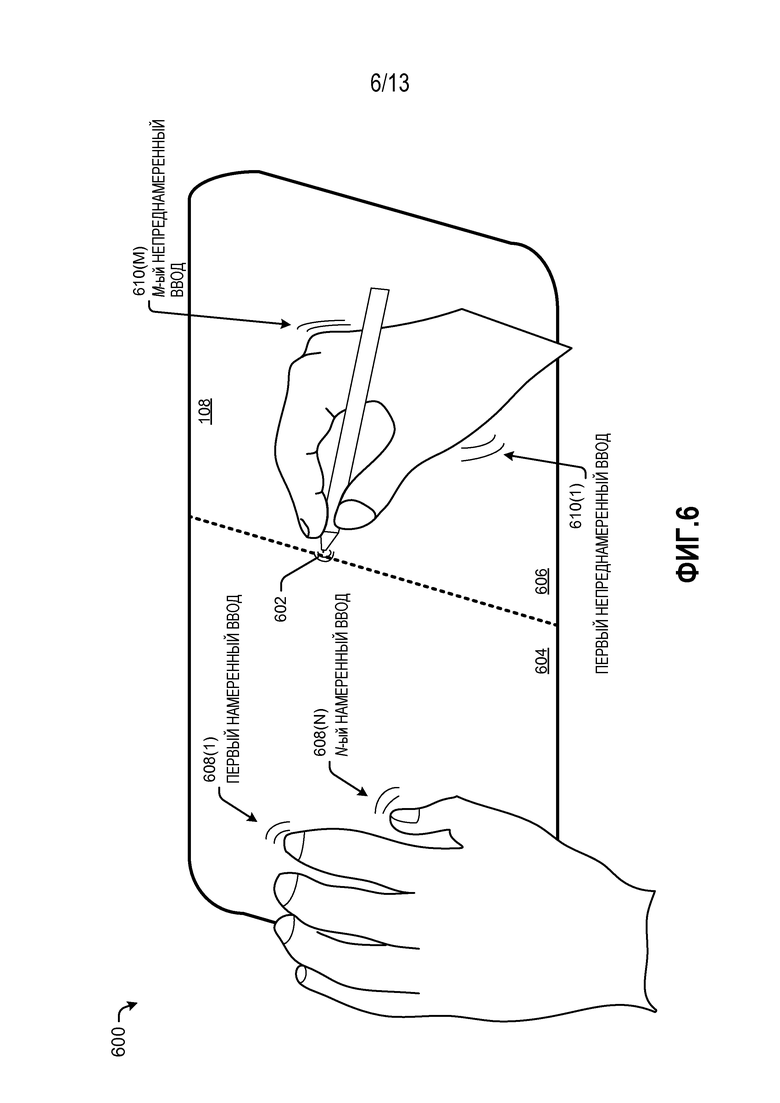
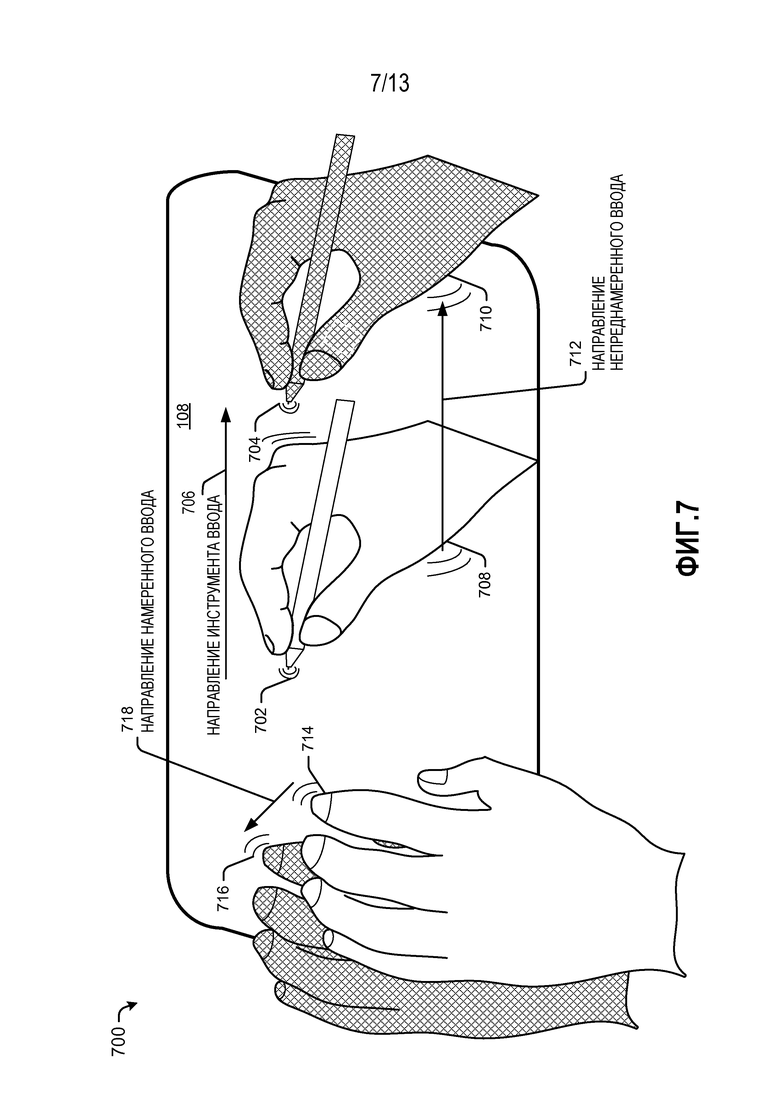
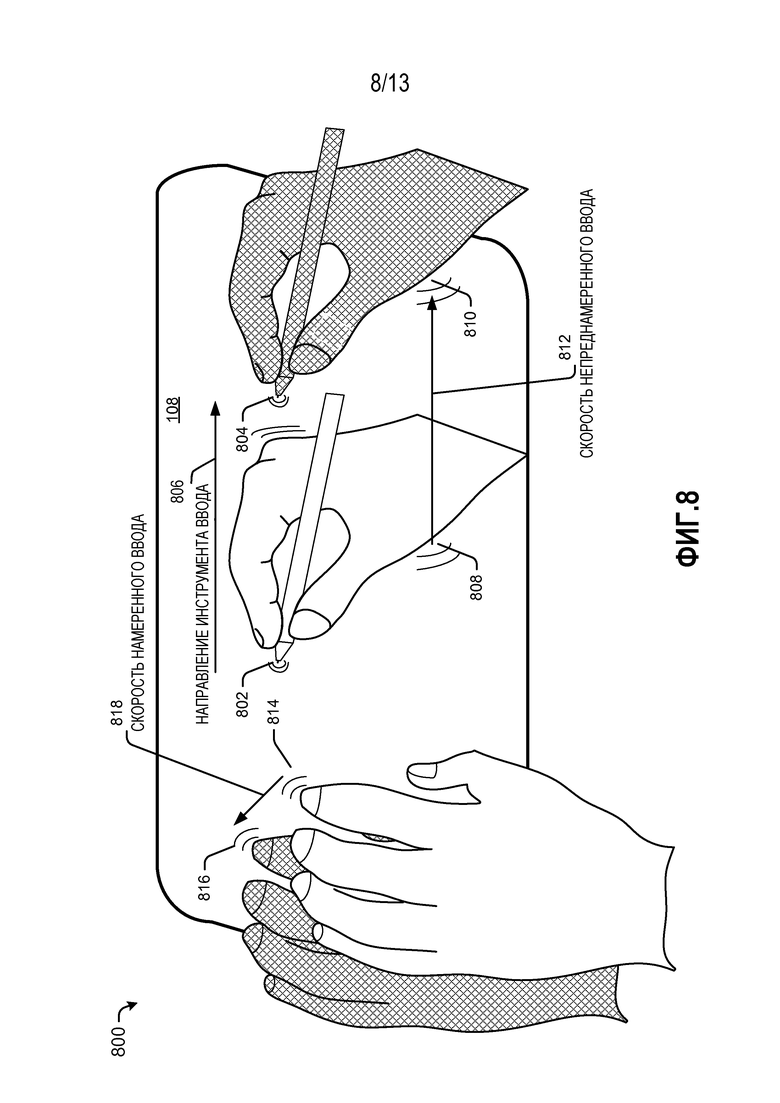
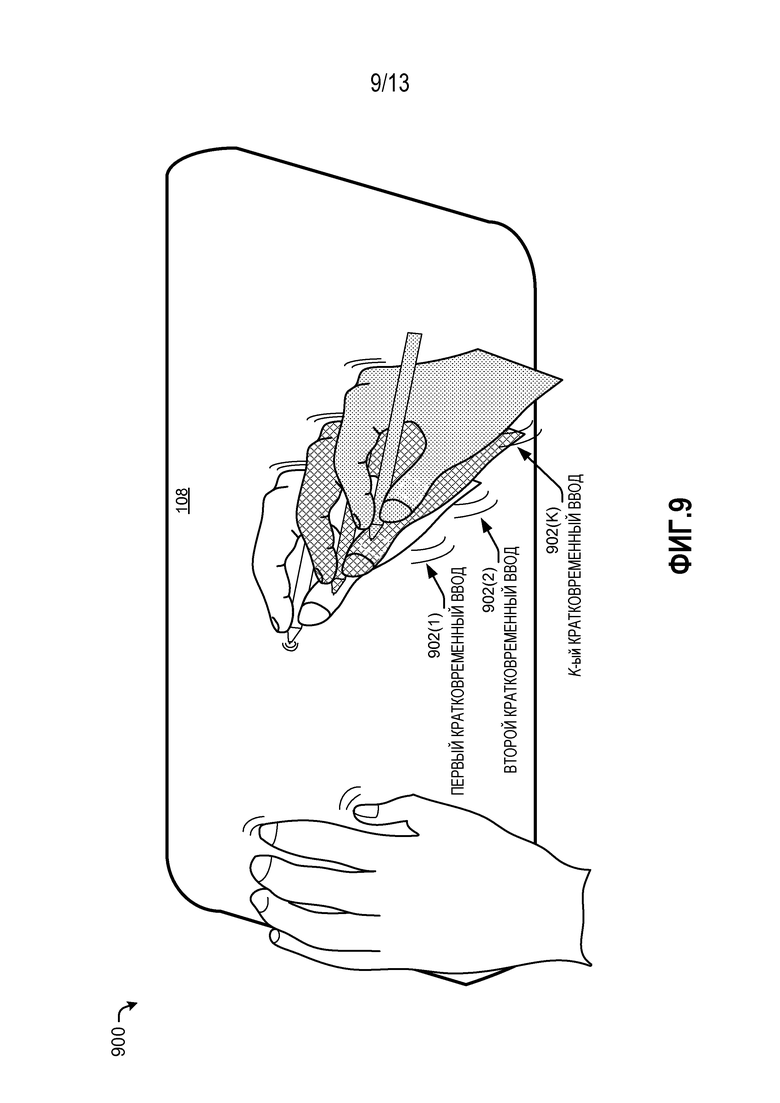
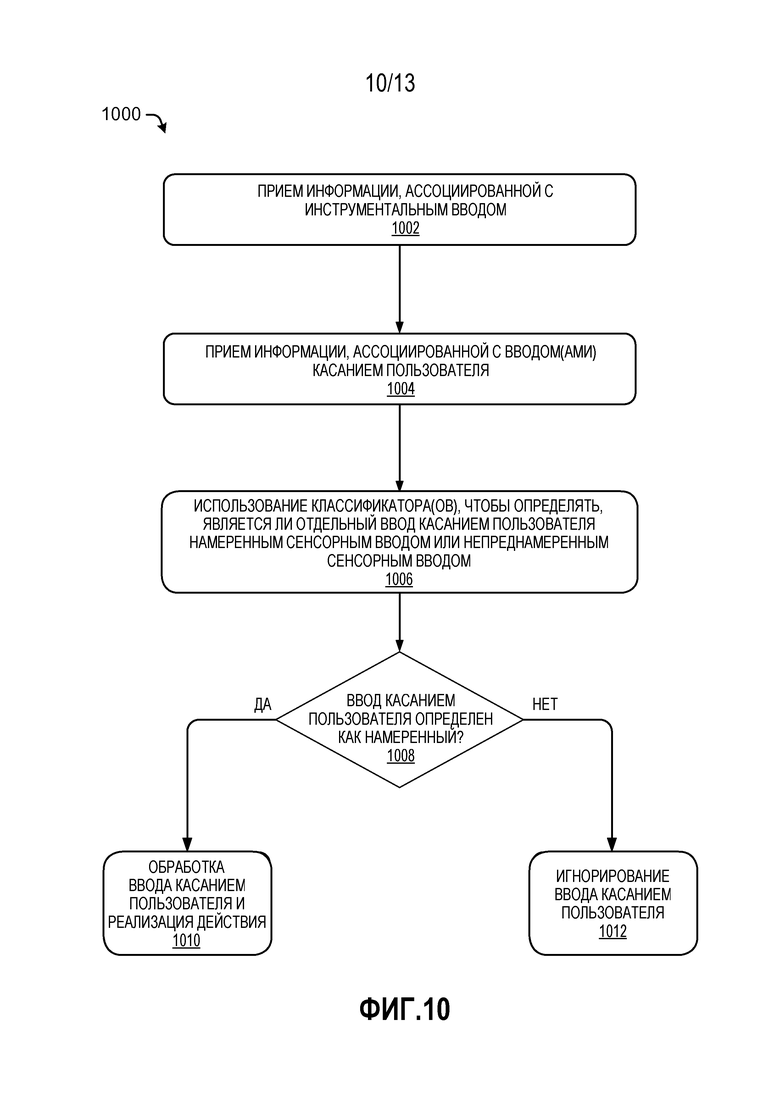
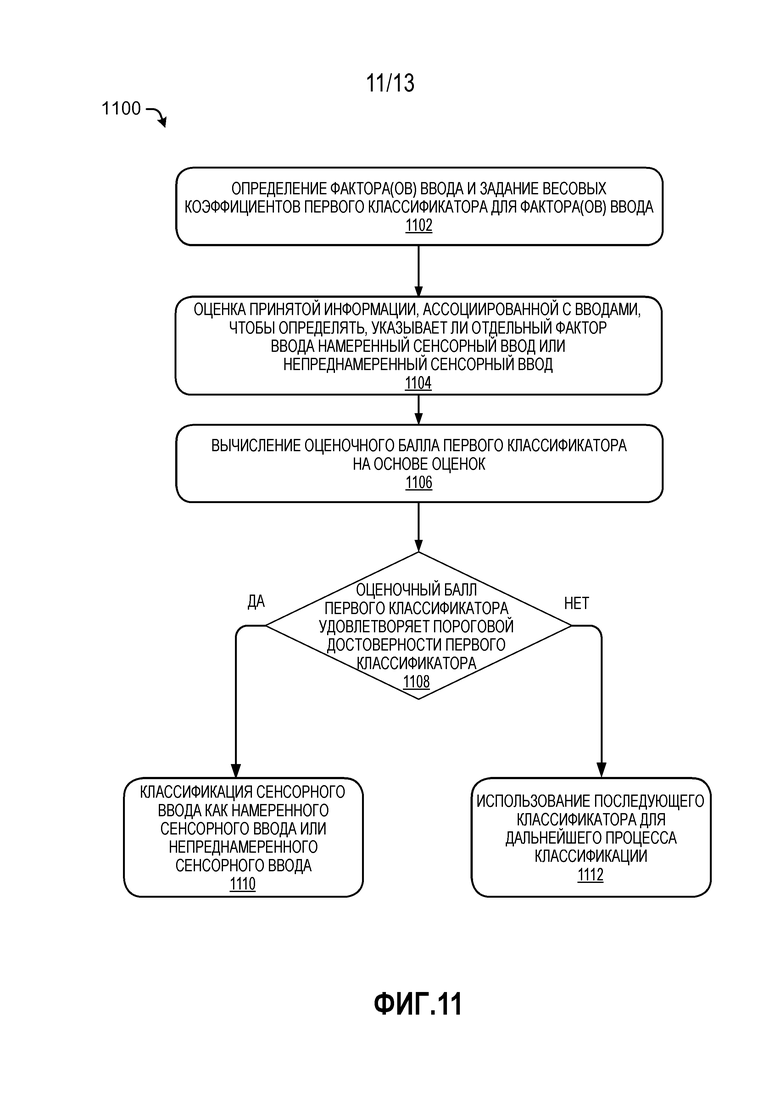
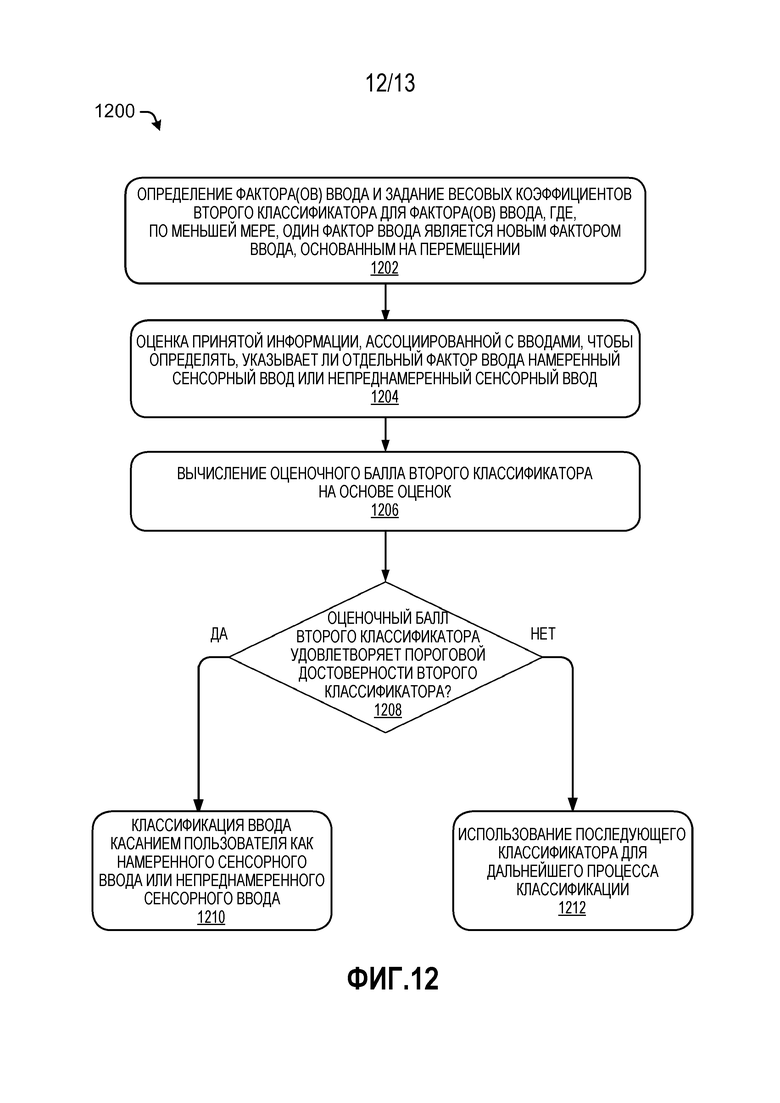
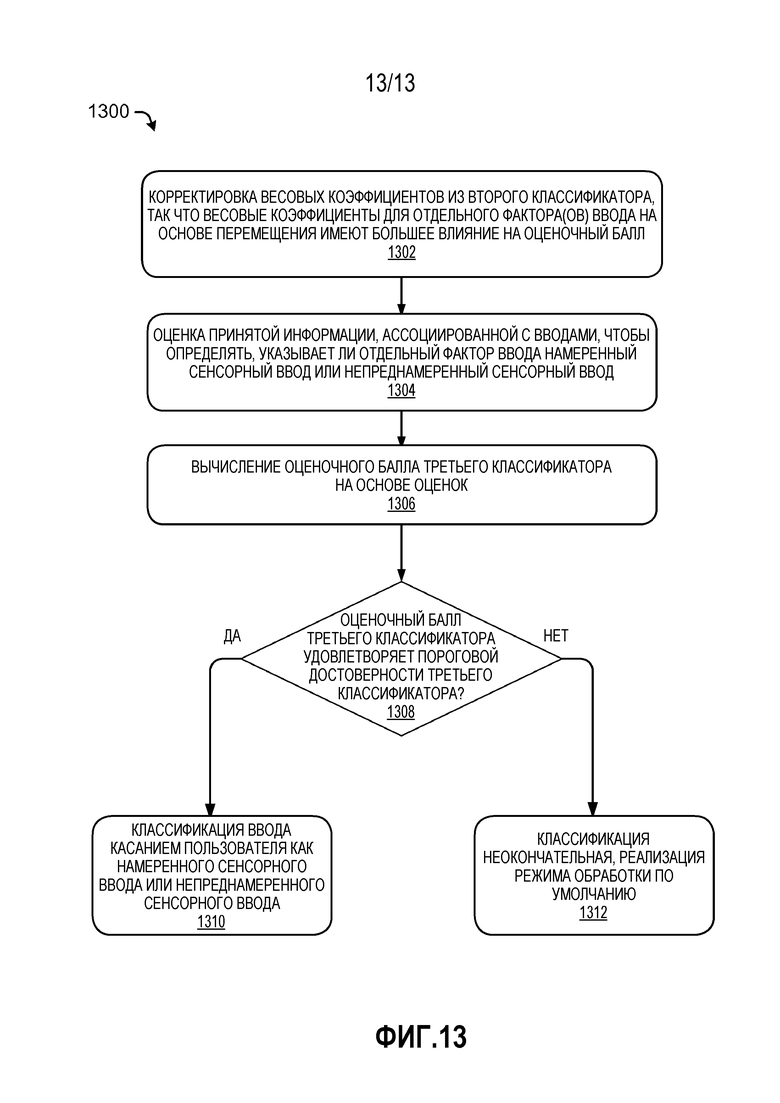
Изобретение относится к сенсорным устройствам ввода. Технический результат заключается в повышении точности ввода данных. Вычислительная система содержит сенсорную поверхность, сконфигурированную принимать множество вводов, один или более процессоров, память, модуль классификации, сохраненный в памяти и исполняемый одним или более процессорами, чтобы оценивать информацию, ассоциированную с инструментальным вводом и вводом касанием пользователя, для определения того, является ли ввод касанием пользователя намеренным сенсорным вводом или непреднамеренным сенсорным вводом, при этом первый классификатор оценивает упомянутую информацию, чтобы определять время между поступлениями между первым временем, когда инструментальный ввод поступает на сенсорной поверхности, и вторым временем, когда ввод касанием пользователя поступает на сенсорной поверхности и в ответ на то, что первый классификатор не может определить, является ли ввод касанием пользователя намеренным сенсорным вводом или непреднамеренным сенсорным вводом, реализовывать по меньшей мере один последующий классификатор, чтобы оценивать дополнительную информацию, ассоциированную с перемещением инструментального ввода относительно перемещения ввода касанием пользователя. 3 н. и 17 з.п. ф-лы, 13 ил. 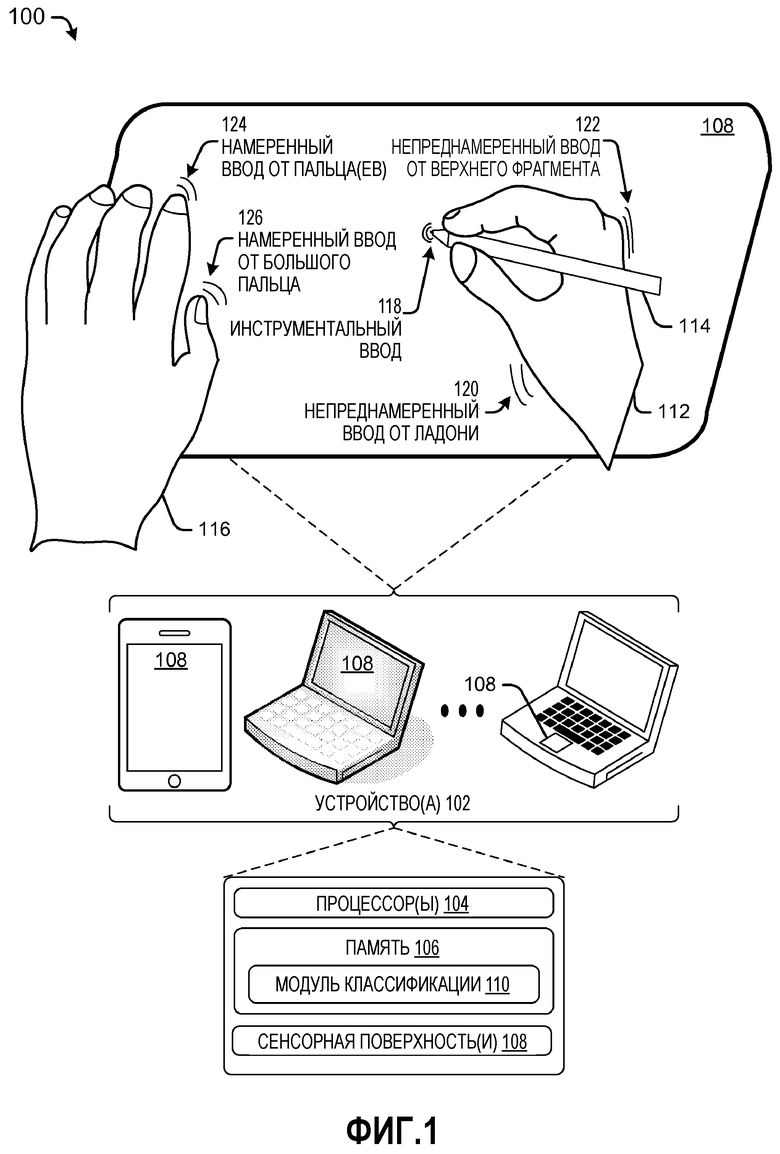
1. Вычислительная система, выполненная с возможностью классификации сенсорного ввода, при этом вычислительная система содержит:
сенсорную поверхность, сконфигурированную принимать множество вводов, включающих в себя, по меньшей мере, инструментальный ввод, ассоциированный с инструментом ввода, и ввод касанием пользователя;
один или более процессоров, связанных с возможностью обмена данными с сенсорной поверхностью;
память, связанную с возможностью обмена данными с одним или более процессорами;
модуль классификации, сохраненный в памяти и исполняемый одним или более процессорами, чтобы:
реализовывать первый классификатор, чтобы оценивать информацию, ассоциированную с инструментальным вводом и вводом касанием пользователя, для определения того, является ли ввод касанием пользователя намеренным сенсорным вводом или непреднамеренным сенсорным вводом, при этом первый классификатор оценивает упомянутую информацию, чтобы определять время между поступлениями между первым временем, когда инструментальный ввод поступает на сенсорной поверхности, и вторым временем, когда ввод касанием пользователя поступает на сенсорной поверхности; и
в ответ на то, что первый классификатор не может определить, является ли ввод касанием пользователя намеренным сенсорным вводом или непреднамеренным сенсорным вводом, реализовывать по меньшей мере один последующий классификатор, чтобы оценивать дополнительную информацию для определения того, является ли ввод касанием пользователя намеренным сенсорным вводом или непреднамеренным сенсорным вводом, при этом оцениваемая дополнительная информация ассоциирована с перемещением инструментального ввода относительно перемещения ввода касанием пользователя.
2. Система по п. 1, в которой
инструмент ввода содержит одно из активного пера и активного стилуса; и
ввод касанием пользователя основывается на контакте от пальца или ладони руки пользователя.
3. Система по п. 1, при этом:
если время между поступлениями меньше порогового времени между поступлениями, тогда, по меньшей мере, часть упомянутой оценки первого классификатора указывает, что ввод касанием пользователя является непреднамеренным сенсорным вводом; и
если время между поступлениями больше или равно пороговому времени между поступлениями, тогда, по меньшей мере, часть упомянутой оценки первого классификатора указывает, что ввод касанием пользователя является намеренным сенсорным вводом.
4. Система по п. 1, в которой первый классификатор оценивает упомянутую информацию, чтобы определять расстояние между поступлениями между первой позицией, где инструментальный ввод поступает на сенсорной поверхности, и второй позицией, где ввод касанием пользователя поступает на сенсорной поверхности.
5. Система по п. 4, при этом:
если расстояние между поступлениями меньше порогового расстояния между поступлениями, тогда, по меньшей мере, часть упомянутой оценки первого классификатора указывает, что ввод касанием пользователя является непреднамеренным сенсорным вводом; и
если расстояние между поступлениями больше или равно пороговому расстоянию между поступлениями, тогда, по меньшей мере, часть упомянутой оценки первого классификатора указывает, что ввод касанием пользователя является намеренным сенсорным вводом.
6. Система по п. 1, в которой упомянутый по меньшей мере один последующий классификатор оценивает упомянутую дополнительную информацию, чтобы определять различие между первым направлением перемещения инструментального ввода и вторым направлением перемещения ввода касанием пользователя.
7. Система по п. 6, при этом:
если упомянутое различие меньше порогового различия направления, тогда, по меньшей мере, часть упомянутой оценки по меньшей мере одного последующего классификатора указывает, что ввод касанием пользователя является непреднамеренным сенсорным вводом; и
если упомянутое различие больше или равно пороговому различию направления, тогда, по меньшей мере, часть упомянутой оценки по меньшей мере одного последующего классификатора указывает, что ввод касанием пользователя является намеренным сенсорным вводом.
8. Система по п. 1, в которой упомянутый по меньшей мере один последующий классификатор оценивает упомянутую дополнительную информацию, чтобы определять различие между первой скоростью перемещения инструментального ввода и второй скоростью перемещения ввода касанием пользователя.
9. Система по п. 8, при этом:
если упомянутое различие меньше порогового различия скорости, тогда, по меньшей мере, часть упомянутой оценки по меньшей мере одного последующего классификатора указывает, что ввод касанием пользователя является непреднамеренным сенсорным вводом; и
если упомянутое различие больше или равно пороговому различию скорости, тогда, по меньшей мере, часть упомянутой оценки по меньшей мере одного последующего классификатора указывает, что ввод касанием пользователя является намеренным сенсорным вводом.
10. Компьютерно-реализуемый способ классификации сенсорного ввода, содержащий этапы, на которых:
определяют, что первый ввод из множества вводов, принимаемых на сенсорной поверхности, ассоциирован с активным инструментом ввода;
определяют, что, по меньшей мере, второй ввод из множества вводов ассоциирован с касанием пользователя;
оценивают по меньшей мере один фактор, который ассоциирован с первым вводом и вторым вводом, чтобы классифицировать второй ввод как намеренный сенсорный ввод или непреднамеренный сенсорный ввод, причем этот по меньшей мере один фактор ассоциирован с определением расстояния между поступлениями между первой позицией, где первый ввод поступает на сенсорной поверхности, и второй позицией, где второй ввод поступает на сенсорной поверхности.
11. Способ по п. 10, дополнительно содержащий этапы, на которых:
вычисляют оценочный балл на основе, по меньшей мере отчасти, упомянутой оценки по меньшей мере одного фактора;
сравнивают оценочный балл с по меньшей мере одним пороговым значением достоверности;
если по результатам сравнения оценочный балл удовлетворяет этому по меньшей мере одному пороговому значению достоверности, классифицируют второй ввод как намеренный сенсорный ввод или непреднамеренный сенсорный ввод; и
если по результатам сравнения оценочный балл не удовлетворяет данному по меньшей мере одному пороговому значению достоверности, оценивают по меньшей мере один второй фактор, ассоциированный с первым вводом и вторым вводом, причем данный по меньшей мере один второй фактор ассоциирован с первым перемещением первого ввода относительно второго перемещения второго ввода.
12. Способ по п. 10, в котором упомянутый по меньшей мере один фактор ассоциирован с определением времени между поступлениями между первым временем, когда первый ввод поступает на сенсорной поверхности, и вторым временем, когда второй ввод поступает на сенсорной поверхности.
13. Способ по п. 10, в котором упомянутый по меньшей мере один фактор ассоциирован с определением различия между первым направлением перемещения первого ввода и вторым направлением перемещения второго ввода.
14. Способ по п. 10, в котором упомянутый по меньшей мере один фактор ассоциирован с определением различия между первой скоростью перемещения первого ввода и второй скоростью перемещения второго ввода.
15. Способ по п. 10, в котором упомянутый по меньшей мере один фактор ассоциирован с первым определением первого количества вводов в первой секции сенсорной панели относительно второго количества вводов во второй секции сенсорной панели.
16. Способ по п. 10, в котором упомянутый по меньшей мере один фактор ассоциирован с определением количества кратковременных вводов.
17. Машиночитаемый носитель информации, хранящий машиночитаемые инструкции для классификации сенсорного ввода, которые при их исполнении одним или более процессорами вычислительного устройства конфигурируют вычислительное устройство выполнять операции, содержащие:
реализацию первого классификатора, чтобы оценивать множество факторов первого классификатора, по меньшей мере один из которых ассоциирован с первым поступлением инструментального ввода относительно второго поступления ввода касанием, причем данное множество факторов первого классификатора предназначено классифицировать сенсорный ввод либо как намеренный сенсорный ввод, либо как непреднамеренный сенсорный ввод, при этом каждый фактор первого классификатора из упомянутого множества факторов первого классификатора имеет соответствующий весовой коэффициент для вычисления оценочного балла;
определение, на основе, по меньшей мере отчасти, оценочного балла, того, что первый классификатор не может достоверно классифицировать сенсорный ввод либо как намеренный сенсорный ввод, либо непреднамеренный сенсорный ввод; и
реализацию последующего классификатора, чтобы оценивать множество факторов второго классификатора, ассоциированных с инструментальным вводом и вводом касанием, причем данное множество факторов второго классификатора включает в себя по меньшей мере один фактор первого классификатора с соответствующим весовым коэффициентом, скорректированным для уменьшения влияния оценочного балла этого по меньшей мере одного фактора первого классификатора во время данной реализации последующего классификатора.
18. Машиночитаемый носитель информации по п. 17, при этом:
один или более факторов второго классификатора из упомянутого множества факторов второго классификатора основываются, по меньшей мере отчасти, на перемещении инструментального ввода относительно перемещения ввода касанием; и
упомянутые соответствующие весовые коэффициенты задаются на основе, по меньшей мере отчасти, изученной информации пользовательского ввода.
19. Машиночитаемый носитель информации по п. 17, при этом по меньшей мере один фактор первого классификатора определяет время между поступлениями между первым временем, когда инструментальный ввод поступает на сенсорной поверхности, и вторым временем, когда ввод касанием поступает на сенсорной поверхности.
20. Машиночитаемый носитель информации по п. 17, при этом по меньшей мере один фактор первого классификатора определяет расстояние между поступлениями между первой позицией, в которой инструментальный ввод поступает на сенсорной поверхности, и второй позицией, в которой ввод касанием поступает на сенсорной поверхности.
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| АУДИОКОДИРОВАНИЕ С ИСПОЛЬЗОВАНИЕМ ПОВЫШАЮЩЕГО МИКШИРОВАНИЯ | 2008 |
|
RU2474887C2 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АКТИВНОЙ ОБЛАСТИ ВВОДА | 2010 |
|
RU2523937C2 |

