Область техники, к которой относится изобретение
Настоящее изобретение относится, в общем, к способам и системам для регулирования воздушно-топливного отношения ниже по потоку от каталитического нейтрализатора выпускной системы двигателя.
Уровень техники
Регулирование выбросов из системы двигателя может быть обеспечено при помощи каталитического нейтрализатора, соединенного с выпускной системой двигателя. Для поддержания высокой эффективности каталитического нейтрализатора необходимо точное регулирование воздушно-топливного отношения отработавших газов, протекающих через каталитический нейтрализатор. Регулирование воздушно-топливного отношения отработавших газов может быть обеспечено посредством контроллеров путем регулирования количества впрыскиваемого топлива при помощи сочетания контуров управления с прямой связью и обратной связью. Настройка контроллеров в зависимости от разных условий работы двигателя может быть процессом сложным и долгим. Сложность возникает в результате недостаточного понимания системы двигателя и затрудненности выявления основной причины возникновения различного отклика системы.
Другие методы определения параметров управления предусматривают в частности настройку контроллера при помощи релейной обратной связи. Например, такой подход раскрыт Бойко (Boiko) и др. в патентном документе US 8255066 В2. В соответствии с данным решением предусмотрено генерирование колебаний с заданным запасом устойчивости по амплитуде или по фазе, а параметры настройки ПИД-контроллера определяют на основании амплитуды и частоты колебаний
Однако авторы настоящего изобретения установили, что идентификация, специально предназначенная для соответствующей модели, в данном случае - для автомобильной системы доочистки отработавших газов, обеспечивает возможность более глубокого понимания внутренних взаимосвязей и больший охват различных условий работы по сравнению с обычной настройкой контроллера. Простая модель, позволяющая определить динамический отклик системы в рассматриваемом частотном диапазоне, может решить проблему настройки контроллера. Такая модель может быть легко охарактеризована и может быть интегрирована в структуру контроллера. Кроме того, отклик контроллера может быть улучшен путем обновления калибровки исходных (фабричных) параметров управления в оперативном режиме для устранения смещения параметров управления, связанного со старением каталитического нейтрализатора с течением времени.
Раскрытие сущности изобретения
В соответствии с одним из примеров осуществления изобретения для устранения вышеописанных недостатков предложен способ, в котором во время работы двигателя в установившемся режиме регулируют впрыск топлива в цилиндр в зависимости от данных обратной связи датчика, установленного ниже по потоку от объема каталитического нейтрализатора, на основании параметров управления, причем параметры управления определены на основании идентификации системы в точке неустойчивости управления с обратной связью. Таким образом, во время работы двигателя параметры управления могут быть обновлены в оперативном режиме с незначительным влиянием на работу двигателя и каталитического нейтрализатора. Кроме того, обновленные параметры управления могут лучше учитывать старение системы и поддерживать высокую эффективность каталитического нейтрализатора.
В соответствии с одним из примеров осуществления воздушно-топливное отношение выше по потоку от каталитического нейтрализатора могут регулировать посредством внутреннего контура обратной связи, а воздушно-топливное отношение ниже по потоку от каталитического нейтрализатора могут регулировать посредством внешнего контура обратной связи. Параметры управления внешнего контура обратной связи могут быть настроены в автономном режиме для каждого из набора заранее определенных значений массового расхода выше по потоку от каталитического нейтрализатора. Калиброванные параметры управления могут быть сохранены в контроллере двигателя и использованы во время работы двигателя в зависимости от условий работы двигателя. Справочная таблица может быть обновлена в оперативном режиме во время работы двигателя в установившемся режиме. В частности, могут быть возбуждены колебания воздушно-топливного отношения ниже по потоку от каталитического нейтрализатора путем управления внутренним контуром обратной связи при помощи релейной функции. В таком случае внешний управляющий контур обратной связи переходит в состояние неустойчивости управления с обратной связью, и параметры управления могут быть обновлены на основании идентификации системы. Таким образом, параметры управления могут быть обновлены в оперативном режиме на основании минималистского динамического определения характеристик контура управления каталитическим нейтрализатором с незначительным влиянием на работу двигателя и каталитического нейтрализатора. Обновленные параметры управления обеспечивают возможность достижения высокой эффективности каталитического нейтрализатора в широком диапазоне условий работы двигателя. Кроме того, справочная таблица может быть сгенерирована в автономном режиме для предоставления исходных характеристик для всех условий работы, определенных в контролируемых лабораторных условиях.
Следует понимать, что вышеприведенное краткое раскрытие изобретения служит лишь для ознакомления в простой форме с некоторыми концепциями, которые далее будут раскрыты подробно в разделе «Осуществление изобретения». Это раскрытие не предназначено для обозначения ключевых или существенных отличительных признаков заявленного объекта изобретения, объем которого однозначно определен формулой изобретения, приведенной после раздела «Осуществление изобретения». Кроме того, заявленный объект изобретения не ограничен вариантами осуществления, которые устраняют какие-либо недостатки, указанные выше или в любой другой части настоящего раскрытия.
Краткое описание чертежей
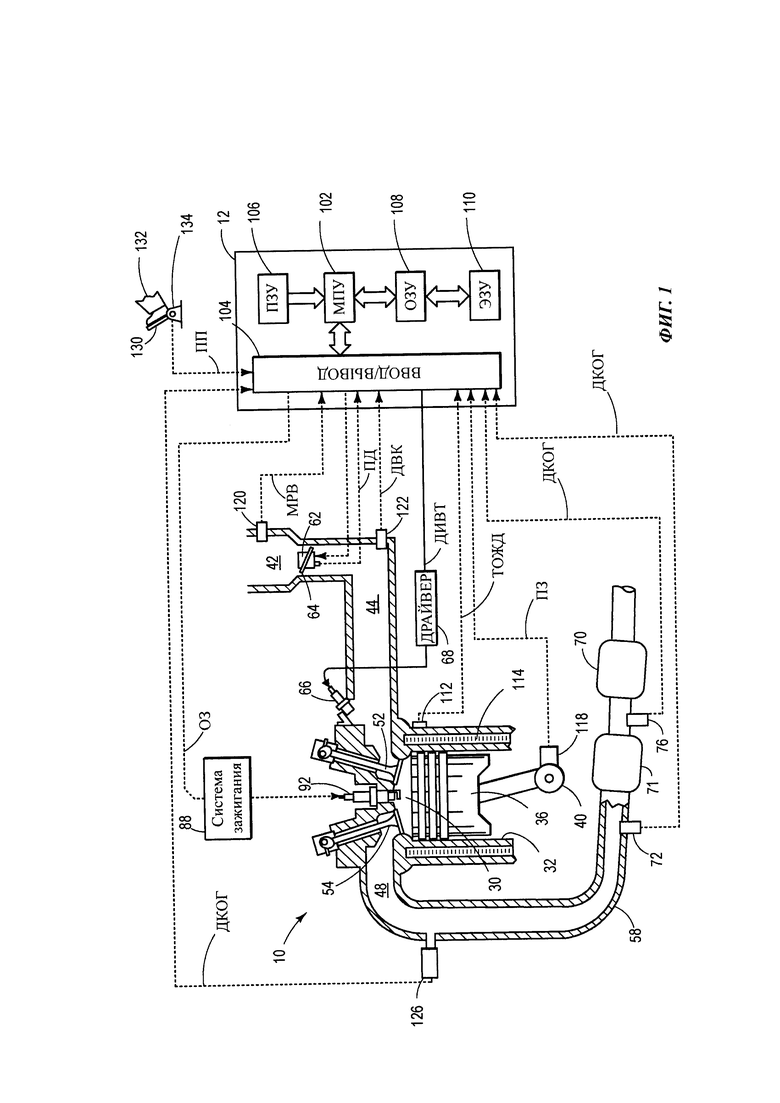
На фиг. 1 представлена схема примера осуществления системы двигателя.
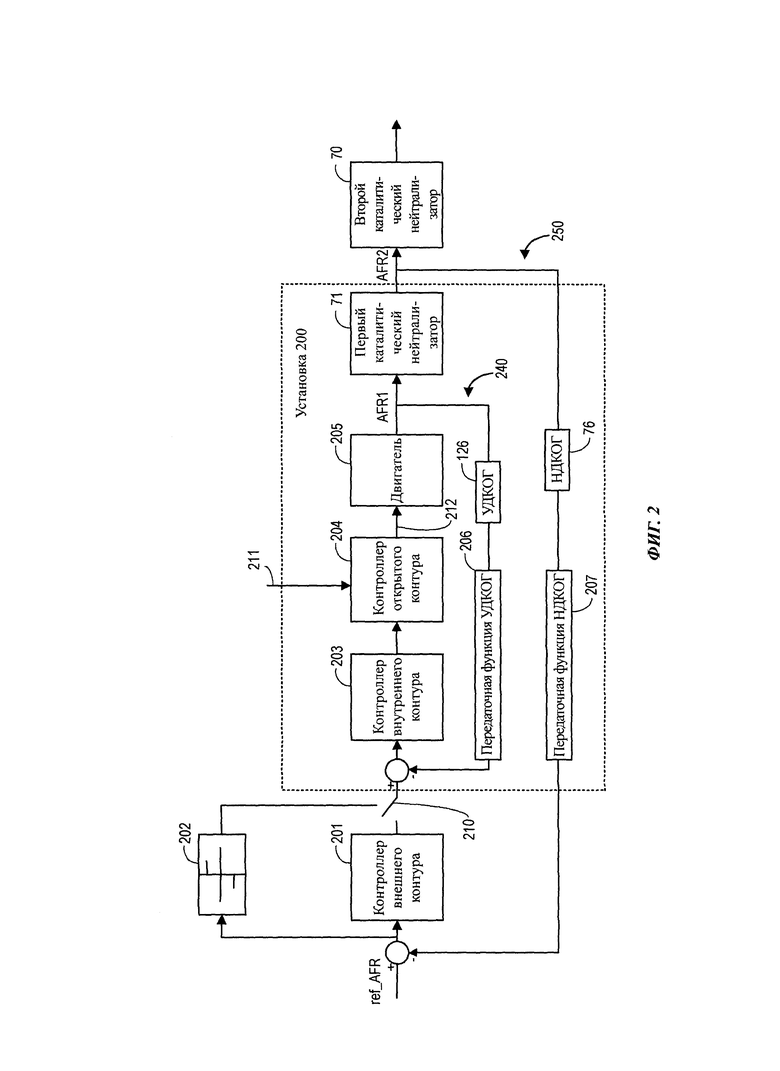
На фиг. 2 представлена функциональная схема верхнего уровня, иллюстрирующая контуры управления каталитическим нейтрализатором.
На фиг. 3 представлена блок-схема, иллюстрирующая пример осуществления способа управления каталитическим нейтрализатором.
На фиг. 4А представлена временная диаграмма параметров работы и сигналов двигателя при выполнении способа по данному примеру осуществления.
На фиг. 4В представлена в увеличенном масштабе временная диаграмма по фиг. 4А, иллюстрирующая пример осуществления способа идентификации системных параметров на основании отклика системы.
На фиг. 5 представлен пример осуществления структуры управления с внутренней моделью.
На фиг. 6 представлена функциональная схема примера осуществления контроллера внешнего контура для управления каталитическим нейтрализатором.
На фиг. 7 представлена функциональная схема нижнего уровня примера осуществления контроллера внешнего контура во временной области.
Осуществление изобретения
Нижеследующее раскрытие относится к системам и способам для управления работой каталитического нейтрализатора отработавших газов путем регулирования воздушно-топливного отношения ниже по потоку от каталитического нейтрализатора. На фиг. 1 представлен пример осуществления системы двигателя, содержащей каталитический нейтрализатор для обработки отработавших газов. На фиг. 2 представлена функциональная схема верхнего уровня, иллюстрирующая контуры обратной связи для управления каталитическим нейтрализатором. В число контуров обратной связи входят внешний контур обратной связи, основанный на получении сигнала обратной связи значения воздушно-топливного отношения ниже по потоку от каталитического нейтрализатора, и внутренний контур обратной связи, основанный на получении сигнала обратной связи значения воздушно-топливного отношения выше по потоку от каталитического нейтрализатора. Контроллер внешнего контура может быть заменен на релейную функцию для смещения внешнего контура обратной связи в точку неустойчивости управления с обратной связью. В связи со старением каталитического нейтрализатора может быть необходимо обновление параметров управления. На фиг. 3 представлен пример осуществления способа управления каталитическим нейтрализатором, в котором параметры управления могут быть обновлены в оперативном режиме при нахождении в точке неустойчивости управления с обратной связью. Фиг. 4А иллюстрирует изменения параметров работы двигателя и сигналов во времени при осуществлении примера способа, представленного на фиг. 3. Фиг. 4 В иллюстрирует, каким образом могут быть определены системная задержка и системное усиление на основании отклика системы. Параметры управления могут быть определены на основании системной задержки и системного усиления посредством управления с внутренней моделью. Пример структуры управления с внутренней моделью представлен на фиг. 5. На фиг. 6 представлен пример функциональной схемы примера осуществления контроллера внешнего контура. На фиг. 7 представлена функциональная схема нижнего уровня примера осуществления контроллера внешнего контура по фиг. 6 во временной области.
На фиг. 1 представлена схема одного из цилиндров многоцилиндрового двигателя 10, который может быть предусмотрен в составе движительной системы транспортного средства. Управление двигателем 10 может быть по меньшей мере частично обеспечено системой управления, содержащей контроллер 12, и командами оператора 132 транспортного средства, вводимыми через устройство 130 ввода. В соответствии с настоящим примером осуществления в состав устройства 130 ввода входят педаль акселератора и датчик 134 положения педали для генерирования пропорционального сигнала ПП положения педали. Камера 30 сгорания (также называемая цилиндром 30) двигателя 10 может содержать стенки 32 камеры сгорания, внутри которых установлен поршень 36. Поршень 36 может быть соединен с коленчатым валом 40 для преобразования возвратно-поступательного движения поршня во вращательное движение коленчатого вала. Коленчатый вал 40 может быть соединен по меньшей мере с одним ведущим колесом транспортного средства через предусмотренную между ними систему трансмиссии (не представлена). Кроме того, может быть предусмотрен электромотор стартера, соединенный с коленчатым валом 40 через маховик (не представлен), для обеспечения возможности запуска двигателя 10.
Камера 30 сгорания может получать впускной воздух из впускного коллектора 44 через впускной канал 42 и может выпускать отработавшие газы сгорания через выпускной коллектор 48. Впускной коллектор 44 и выпускной коллектор 48 могут выборочно сообщаться с камерой 30 сгорания через соответствующие впускной клапан 52 и выпускной клапан 54. В соответствии с некоторыми из вариантов осуществления камера 30 сгорания может содержать два или более впускных клапанов и/или два или более выпускных клапанов.
Топливный инжектор 66 представлен установленным во впускном коллекторе 44 в соответствии с конфигурацией так называемого распределенного впрыска топлива во впускное окно выше по потоку от камеры 30 сгорания. Топливный инжектор 66 может производить впрыск топлива, количество которого пропорционально длительности импульса сигнала ДИВТ, получаемого от контроллера 12 через электронный драйвер 68. Топливо может быть доставлено в топливный инжектор 66 посредством топливной системы (не представлена), содержащей топливный бак, топливный насос и топливную рампу. В соответствии с некоторыми из примеров осуществления камера 30 сгорания может альтернативно или дополнительно содержать топливный инжектор, непосредственно соединенный с камерой 30 сгорания для непосредственного впрыска топлива в нее в соответствии с конфигурацией так называемого непосредственного впрыска.
Впускной канал 42 может содержать дроссель 62, содержащий дроссельную заслонку 64. В соответствии с настоящим примером осуществления контроллер 12 может изменять положение дроссельной заслонки 64 при помощи сигнала, подаваемого на электромотор или исполнительный механизм, предусмотренный в составе дросселя 62, в соответствии с конфигурацией, обычно называемой электронным приводом дросселя (ЭПД). Таким образом, дроссель 62 может быть использован для изменения подачи впускного воздуха в камеру 30 сгорания и другие цилиндры двигателя. Информация о положении дроссельной заслонки 64 может поступать в контроллер 12 в виде сигнала ПД положения дросселя. Впускной канал 42 может содержать датчик 120 массового расхода воздуха, присоединенный выше по потоку от дросселя 62 для измерения расхода воздушного заряда, поступающего в цилиндр через дроссель 62. Впускной канал 42 также может содержать датчик 122 давления воздуха в коллекторе, присоединенный ниже по потоку от дроссельной заслонки 62 для измерения давления воздуха в коллекторе (ДВК).
В некоторых режимах работы система 88 зажигания может обеспечить искру зажигания в камере 30 сгорания при помощи искровой свечи 92 зажигания в ответ на сигнал 03 опережения зажигания от контроллера 12. Хотя на чертеже представлены компоненты искрового зажигания, в соответствии с некоторыми вариантами изобретения камера 30 сгорания или одна или несколько из других камер сгорания двигателя 10 могут работать в режиме зажигания от сжатия, с искровым зажиганием или без него.
Датчик 126 отработавших газов представлен присоединенным к выпускному каналу 58 выше по потоку от устройства 70 снижения токсичности выбросов. Датчик 126 может представлять собой любой подходящий датчик для индикации воздушно-топливного отношения отработавших газов, например линейный кислородный датчик или УДКОГ (универсальный или широкополосный датчик кислорода в отработавших газах), узкополосный (известный как двухпозиционное устройство в системах старого типа) кислородный датчик или ДКОГ, НДКОГ (нагреваемый ДКОГ), или датчик оксидов азота (NOx), углеводородов (УВ) или угарного газа (СО). Устройства 71 и 70 снижения токсичности выбросов представлены установленными в выпускном канале 58 ниже по потоку от газоанализатора 126 отработавших газов. Устройства 71 и 70 могут представлять собой трехкомпонентный каталитический нейтрализатор (ТКН), ловушку NOx, различные другие устройства снижения токсичности выбросов или их сочетания. Датчик 76 отработавших газов представлен присоединенным к выпускному каналу 58 ниже по потоку от первого устройства 71 снижения токсичности выбросов. Датчик 76 может представлять собой любой подходящий датчик для индикации воздушно-топливного отношения отработавших газов, например линейный кислородный датчик или УДКОГ (универсальный или широкополосный датчик кислорода в отработавших газах), узкополосный кислородный датчик или ДКОГ, НДКОГ (нагреваемый ДКОГ), или датчик оксидов азота (NOx), углеводородов (УВ) или угарного газа (СО). В соответствии с другим примером осуществления устройства 71 и 70 снижения токсичности выбросов могут быть объединены в одно устройство с двумя раздельными объемами, причем между двумя объемами такого устройства снижения токсичности выбросов может быть расположен межслойный датчик для измерения воздушно-топливного отношения в центре каталитического нейтрализатора.
Выше по потоку от первого устройства 71 снижения токсичности выбросов могут быть установлены другие датчики 72, например датчик массового расхода воздуха и/или датчик температуры для контроля массового расхода и температуры отработавших газов на входе устройства снижения токсичности выбросов. Расположение датчиков, изображенное на фиг. 1, соответствует лишь одной из возможных конфигураций, представленной в качестве примера. Например, система снижения токсичности выбросов может содержать одно устройство снижения токсичности выбросов, часть объема которого занимают каталитические нейтрализаторы, плотно прилегающие друг к другу.
Контроллер 12 показан на фиг. 1 в виде микрокомпьютера, содержащего: микропроцессорное устройство 102, порты 104 ввода/вывода, электронный носитель информации для выполняемых программ и калибровочных значений, в данном конкретном примере показанный в виде постоянного запоминающего устройства 106, оперативное запоминающее устройство 108, энергонезависимое запоминающее устройство 110 и шину данных. Контроллер 12 может принимать, в дополнение к рассмотренным выше сигналам, разнообразные сигналы от соединенных с двигателем 10 датчиков, среди которых можно назвать: показание массового расхода воздуха (МРВ) от датчика 120 массового расхода воздуха; показание температуры охлаждающей жидкости двигателя (ТОЖД) от датчика 112 температуры, соединенного с рубашкой 114 охлаждения; сигнал профиля зажигания (ПЗ) от датчика 118 на эффекте Холла (или датчика иного типа), соединенного с коленчатым валом 40; положения дросселя (ПД) от датчика положения дросселя; показание массы воздуха и/или температуры отработавших газов, поступающих в каталитический нейтрализатор, от датчика 72; воздушно-топливное отношение отработавших газов после прохождения каталитического нейтрализатора от датчика 76; и сигнал абсолютного давления воздуха в коллекторе (ДВК) от датчика 122. Сигнал частоты вращения двигателя (ЧВД) может быть сгенерирован контроллером 12 из сигнала ПЗ. Сигнал давления воздуха в коллекторе ДВК от датчика давления воздуха в коллекторе можно использовать для индикации разряжения или давления во впускном коллекторе. Следует отметить, что могут быть использованы различные сочетания вышеуказанных датчиков, например, датчик МРВ без датчика ДВК, или наоборот. Во время работы двигателя в стехиометрическом режиме значение крутящего момента двигателя может быть определено по выходному сигналу датчика ДВК. Кроме того, сигнал этого датчика, помимо индикации частоты вращения двигателя, может быть использован для оценки заряда (в том числе воздуха), поступающего в цилиндр. В соответствии с одним из примеров осуществления датчик 118 положения коленчатого вала, также используемый в качестве датчика частоты вращения двигателя, может вырабатывать на каждый оборот коленчатого вала заранее определенное число равноотстоящих импульсов. Кроме того, контроллер 12 может осуществлять обмен данными с кластерным дисплейным устройством 136, например, для извещения водителя о неисправностях системы двигателя или системы доочистки отработавших газов.
Носитель информации, выполненный в виде постоянного запоминающего устройства 106, может быть запрограммирован машиночитаемыми данными, соответствующими инструкциям, выполняемым процессором 102 для осуществления способов, раскрытых ниже, а также любых их вариантов, подразумеваемых, но конкретно не перечисленных.
Контроллер 12 получает сигналы от различных датчиков, представленных на фиг. 1, и использует различные исполнительные механизмы, представленные на фиг. 1, для регулировки работы двигателя на основании полученных сигналов и инструкций, сохраненных в памяти контроллера. Например, регулирование впрыска топлива может включать в себя регулирование длительности импульса сигнала ДИВТ, подаваемого на электронный драйвер 68, для изменения количества топлива, впрыскиваемого в цилиндр.
На фиг. 2 представлена функциональная схема верхнего уровня, иллюстрирующая внешний контур 250 обратной связи и внутренний контур 240 обратной связи для управления каталитическим нейтрализатором. Внутренний контур обратной связи может содержать контроллер 203 внутреннего контура, контроллер 204 открытого контура, двигатель 205, УДКОГ 126 и передаточную функцию 206, преобразующую напряжение датчика в ВТО. Внешний контур обратной связи может содержать контроллер 201 внешнего контура, НДКОГ 76 и передаточную функцию 207, преобразующую напряжение датчика в ВТО, а также внутренний контур обратной связи. Внешний контур регулирует воздушно-топливное отношение (ВТО) ниже по потоку от первого каталитического нейтрализатора или первого объема 71 каталитического нейтрализатора при помощи контроллера 201 внешнего контура. Внутренний контур регулирует ВТО выше по потоку от первого каталитического нейтрализатора.
Контроллер (например, контроллер 12 по фиг. 1) может передавать во внешний контур обратной связи сигнал эталонного ВТО (ref_AFR). Эталонное ВТО может соответствовать требуемому ВТО ниже по потоку от первого каталитического нейтрализатора. Разность между значением ref_AFR и значением AFR2 ВТО, измеренного ниже по потоку от первого каталитического нейтрализатора, может быть передана контроллеру 201 внешнего контура в качестве сигнала ошибки. Подключение переключателя 210 к контроллеру 201 внешнего контура обеспечивает возможность вычисления разности между выходным сигналом контроллера внешнего контура и значением AFR1 ВТО, измеренным выше по потоку от первого каталитического нейтрализатора, и ее передачи контроллеру 203 внутреннего контура. Контроллер 204 открытого контура может содержать первый вход, на который поступает выходной сигнал контроллера 203 внутреннего контура, и второй вход 211. На вход 211 может поступать, например, значение воздушного заряда в цилиндре, определенное на основании требуемого крутящего момента. В соответствии с другим примером осуществления на вход 211 может поступать значение массы подаваемого воздуха. Контроллер открытого контура может обеспечивать компенсирующие поправки для контроллера (12), в том числе на продувку адсорбера и подачу топлива в холодный двигатель. Поправки открытого контура задают опережение системы закрытого контура и позволяют контроллеру внутреннего контура компенсировать лишь неожиданные отклонения. Контроллер 204 открытого контура работает в несколько этапов, сперва обеспечивая управление для каждого из блоков цилиндров, а затем регулируя индивидуальную подачу топлива по отдельным цилиндрам с подачей в двигатель 205 выходного сигнала 212, причем сигнал 212 может указывать количество впрыскиваемого топлива. Например, сигнал 212 может представлять собой сигнал длительности импульса впрыска топлива (ДИВТ). В ответ на сигнал 212 двигатель 205 выводит отработавшие газы, ВТО которых равно AFR1. Отработавшие газы могут проходить через первый каталитический нейтрализатор 71 с изменением ВТО до значения AFR2.
При некоторых условиях работы транспортного средства, например при работе двигателя в установившемся режиме и достаточной активации первого (71) и второго (70) каталитических нейтрализаторов переключатель 210 может быть альтернативно подсоединен к релейной функции 202 для калибровки параметров управления контроллера 201 внешнего контура. Каталитический нейтрализатор может быть достаточно активирован, если температура каталитического нейтрализатора превышает пороговое значение. Параметры управления могут быть определены на основании характеристик установки 200. Установка 200 может содержать внутренний контур обратной связи, первый каталитический нейтрализатор 71 и НДКОГ, установленный после первого каталитического нейтрализатора. Процедуры калибровки параметров управления представлены на фиг. 3.
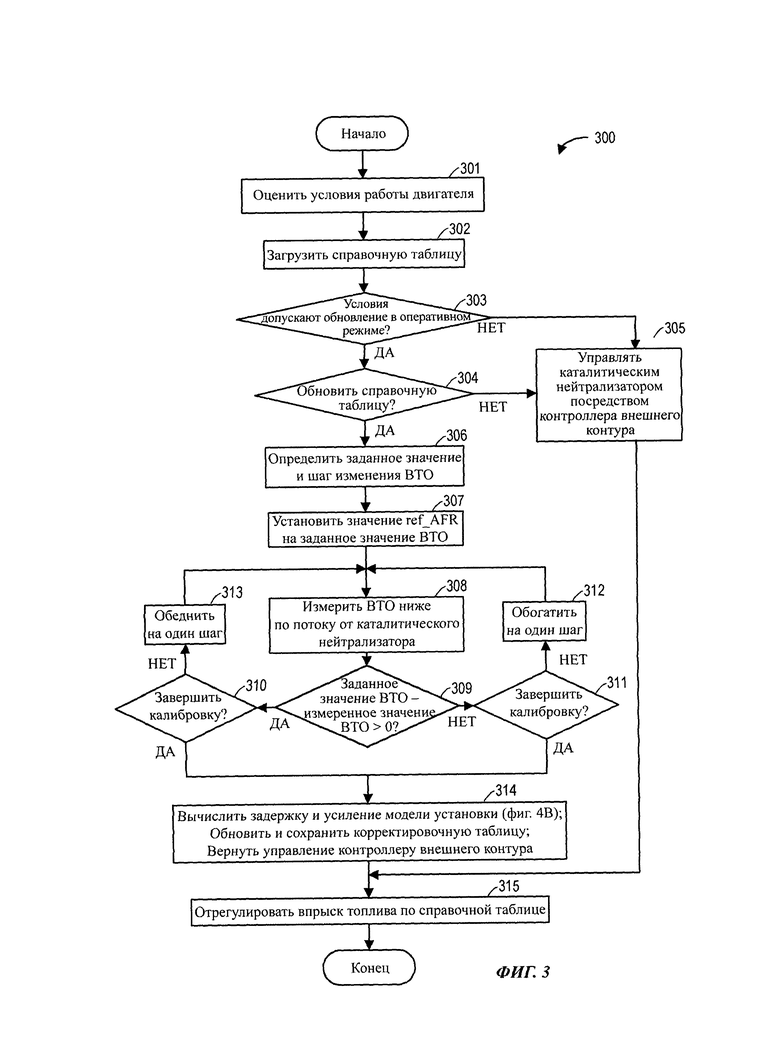
На фиг. 3 представлен пример осуществления способа 300 управления каталитическим нейтрализатором при помощи контура обратной связи, например, внешнего контура обратной связи, представленного на фиг. 2. Параметры управления контроллера внешнего контура могут быть получены из справочной таблицы. В некоторых условиях работы двигателя может быть произведено обновление справочной таблицы путем перевода внешнего контура обратной связи в точку неустойчивости управления с обратной связью.
Инструкции для осуществления способа 300 и остальных способов, раскрытых в настоящем описании, могут быть исполнены контроллером транспортного средства (например, контроллером 12 по фиг. 1) на основании инструкций, сохраненных в памяти контроллера, и в зависимости от сигналов, получаемых от датчиков системы двигателя, например, датчиков, описанных выше со ссылками на фиг. 1. Контроллер транспортного средства может использовать исполнительные механизмы двигателя для регулировки работы двигателя в соответствии с нижеописанными способами.
На этапе 301 контроллер транспортного средства определяет условия работы транспортного средства. Контроллер получает данные измерений от различных датчиков системы двигателя и оценивает условия работы, в том числе нагрузку двигателя, частоту вращения двигателя, массовый расход выше по потоку от первого каталитического нейтрализатора, требуемый крутящий момент транспортного средства, температуру каталитического нейтрализатора и положение дросселя.
На этапе 302 способа 300 производят загрузку справочной таблицы для определения параметров управления контроллера внешнего контура обратной связи. В соответствии с одним из примеров осуществления справочная таблица может содержать заранее определенную (базовую) справочную таблицу, сохраненную в долговременной памяти контроллера транспортного средства. Базовая справочная таблица может содержать пример сертифицированного калибровочного уровня выбросов транспортного средства, содержащего умеренно состаренный каталитический нейтрализатор. Базовая справочная таблица может быть применима для каталитических нейтрализаторов различной степени старения, но не обязательно является оптимальной для чрезмерно новых или чрезмерно состаренных каталитических нейтрализаторов. Например, в базовой справочной таблице могут быть сохранены значения массового расхода выше по потоку от первого каталитического нейтрализатора и соответствующие параметры управления. В соответствии с другим вариантом осуществления базовая справочная таблица может содержать значения массового расхода и соответствующие системные характеристики модельной установки (например, установки 200 по фиг. 2), например, значения системной задержки и системного усиления. Во время работы двигателя параметры управления контроллера внешнего контура могут быть вычислены в оперативном режиме в виде математической зависимости от системных характеристик. В соответствии с другим примером осуществления справочная таблица может дополнительно содержать корректировочную таблицу, в которой сохранены разности между обновленными и базовыми параметрами управления или системными параметрами.
На этапе 303 способа 300 определяют, допускают ли условия работы транспортного средства обновление параметров управления в оперативном режиме. В число условий, допускающих обновление в оперативном режиме, могут входить одно или несколько из условий: 1) работа двигателя в установившемся режиме при достаточной активации первого каталитического нейтрализатора (71); 2) нахождение системы привода транспортного средства в состоянии, обеспечивающем возможность маскирования шума/вибрации/резкости (ШВР), которые могут возникать вследствие определения характеристик в оперативном режиме; 3) достаточная активность второго каталитического нейтрализатора (70) для поглощения выбросов, проходящих через первый каталитический нейтрализатор (71) во время калибровки в оперативном режиме; и 4) наличие достаточного времени или числа ездовых циклов между обновлениями параметров управления для исключения излишних испытаний в оперативном режиме. Выполнение первого условия работы двигателя в установившемся режиме может быть определено по наличию устойчивого массового расхода выше по потоку от первого каталитического нейтрализатора. Например, массовый расход может быть измерен датчиком (например, датчиком 72 по фиг. 1). В соответствии с другим примером осуществления массовый расход может быть оценен на основании массового расхода воздуха, поступающего в цилиндр через дроссель. Наличие устойчивого массового расхода также может быть установлено посредством оценки массового расхода на основании одного или нескольких условий: поддержание частоты вращения двигателя в некоторых пределах, временная приостановка любых операций продувки адсорбера, соответствие моделям температурного режима каталитического нейтрализатора и показания НДКОГ, указывающих на активацию первого каталитического нейтрализатора (71). При проверке выполнения второго условия уровень шума/вибрации/резкости (ШВР) может быть определен либо по частоте вращения двигателя или нагрузке двигателя и по выбранным передачам трансмиссии, заведомо известным как маскирующие ШВР транспортного средства, либо по показаниям акселерометров на борту транспортного средства. При проверке выполнения третьего условия достаточная активность второго каталитического нейтрализатора (70) может быть определена по температуре второго каталитического нейтрализатора или длительности его недавнего нахождения при данной температуре. При проверке выполнения четвертого условия число обновлений должно быть ограничено длительностью минимального временного интервала, числом ездовых циклов и/или иным указанием того, что значения справочной таблицы могли быть изменены. Другими словами, длительность временного интервала между соседними обновлениями справочной таблицы не должна быть меньше порогового значения. Это связано с тем, что обновление параметров в оперативном режиме может влиять на проведение некоторых операций, например продувку адсорбера и другие операции системной диагностики. Если система готова к переходу в режим определения характеристик в оперативном режиме, способ 300 переходит к этапу 304. В противном случае способ 300 переходит к этапу 305.
На этапе 304 способа 300 определяют, необходимо ли обновление справочной таблицы. Например, обновление справочной таблицы может быть произведено по истечении заранее определенного временного интервала. Длительность заранее определенного временного интервала зависит от длительности возможного старения каталитического нейтрализатора. В соответствии с другим примером осуществления может быть произведено сопоставление текущего отклика каталитического нейтрализатора с моделью старения каталитического нейтрализатора, определенной при проектировании для каталитического нейтрализатора умеренной степени старения, и может быть выработан сигнал возможности корректирующего обновления. В случае определения необходимости обновления справочной таблицы способ 300 переходит к этапу 306, на котором производят перекалибровку параметров управления при текущем массовом расходе. В противном случае способ 300 переходит к этапу 305.
На этапе 306 способа 300 определяют заданное значение ВТО и соответствующую величину шага изменения ВТО. В соответствии с одним из вариантов осуществления заданное значение ВТО может быть стехиометрическим. В соответствии с другим вариантом осуществления заданное значение ВТО может быть несколько смещено от стехиометрического для обеспечения соответствия со стандартной калибровкой выбросов, направленной на обеспечение оптимального соотношения различных регулируемых параметров с точки зрения снижения выбросов. Например, заданное значение ВТО может быть смещено в сторону обогащения и составлять, например, 0,9985. Величина шага изменения ВТО может быть выбрана равной малой доле заданного значения ВТО. Например, величина шага изменения ВТО может составлять 1-3% заданного значения ВТО. В соответствии с одним из вариантов осуществления могут быть выбраны величина шага обогащения ВТО и величина шага обеднения ВТО. В соответствии с одним из примеров осуществления величина шага обогащения ВТО может быть равна величине шага обеднения ВТО. В соответствии с другим примером осуществления величина шага обогащения ВТО может быть отличной от величины шага обеднения ВТО. Кроме того, на этапе 306 соединяют вход контроллера внутреннего контура с релейной функцией для обеспечения обхода контроллера внешнего контура.
На этапе 307 эталонное ВТО (например, значение ref_AFR на фиг. 2) устанавливают равным заданному значению ВТО, определенному на этапе 306. В соответствии с одним из вариантов осуществления эталонное ВТО устанавливают равным заданному значению ВТО для всех блоков цилиндров двигателя с разными каналами каталитических нейтрализаторов.
На этапе 308 производят измерение фактического ВТО ниже по потоку от первого каталитического нейтрализатора при помощи кислородного датчика, например датчика 76 на фиг. 1. В соответствии с одним из примеров осуществления измерение фактического ВТО может быть произведено при помощи НДКОГ. В соответствии с альтернативным вариантом осуществления измерение фактического ВТО может быть произведено при помощи УДКОГ.
На этапе 309 способа 300 может быть произведено вычисление ошибки путем вычитания измеренного значения ВТО из эталонного ВТО. Если значение ошибки положительно, то на этапе 310 способа 300 определяют, следует ли завершить калибровку параметров управления. Калибровка может быть завершена путем переключения входа контроллера внутреннего контура с релейной функции на контроллер внешнего контура. Например, калибровка может быть завершена в соответствии со способом 300 после того, как собрано достаточное количество релейных циклов для измеренного значения ВТО. В соответствии с другим примером осуществления калибровка может быть завершена в соответствии со способом 300 по истечении заранее определенного периода времени. В соответствии с другим примером осуществления калибровка может быть завершена в соответствии со способом 300, если условия работы транспортного средства более не допускают работы в релейном режиме, и обновление необходимо отложить до следующего возникновения благоприятных условий, но часть данных может быть сохранена до возникновения возможности следующего обновления. На этапе 313 эталонное ВТО может быть обеднено на шаг обеднения ВТО, определенный на этапе 306.
Если значение ошибки отрицательно, то способ 300 переходит к этапу 311, на котором определяют, следует ли завершить процесс калибровки. Как и на этапе 310, калибровка может быть завершена после того, как собрано достаточное количество релейных циклов для измеренного значения ВТО. В альтернативном варианте калибровка может быть завершена по истечении некоторого периода времени. Затем эталонное ВТО может быть обогащено на шаг обогащения ВТО, определенный на этапе 306. Обогащение или обеднение в зависимости от знака ошибки приводит к соответствующему изменению ВТО, измеренному ниже по потоку от первого каталитического нейтрализатора, после некоторой задержки. Следующие друг за другом релейные переключения могут привести к возникновению колебаний ВТО, измеренного ниже по потоку от первого каталитического нейтрализатора, относительно заданного значения ВТО с приблизительно постоянными периодом и амплитудой.
На этапе 314 на основании амплитуды и периода колебаний могут быть определены характеристики установки 200, например, значения системного усиления и системной задержки. Например, системные усиление и задержка могут быть определены на основании значений, усредненных по нескольким периодам колебаний, так как между разными релейными циклами могут быть небольшие отклонения. После определения характерных периода и амплитуды колебаний при данном массовом расходе может быть произведено вычисление параметров управления. Например, разность между текущими оценками и значениями базовой справочной таблицей могут быть занесены в отдельную корректировочную таблицу. Контроллер может использовать сумму значений из корректировочной таблицы и базовой справочной таблицы в качестве параметров управления. В соответствии с другим примером осуществления помимо сохранения параметров управления стандартной системы в базовой справочной таблице может быть предусмотрено сохранение обновленных параметров управления в отдельной справочной таблице, из которой они могут быть непосредственно извлечены контроллером. В соответствии с одним из вариантов осуществления могут быть установлены предельные значения для корректировочной таблицы или для обновленной справочной таблицы, чтобы ограничить отклонения новых параметров управления от параметров управления, содержащихся в базовой справочной таблице. Отклонения, превышающие пороговые, могут быть использованы системами диагностики для выявления потенциальных неисправностей. В соответствии с одним из примеров осуществления сохраненным в корректировочной таблице параметрам, выходящим за заранее определенные нижний и верхний пределы, могут быть присвоены значения пределов.
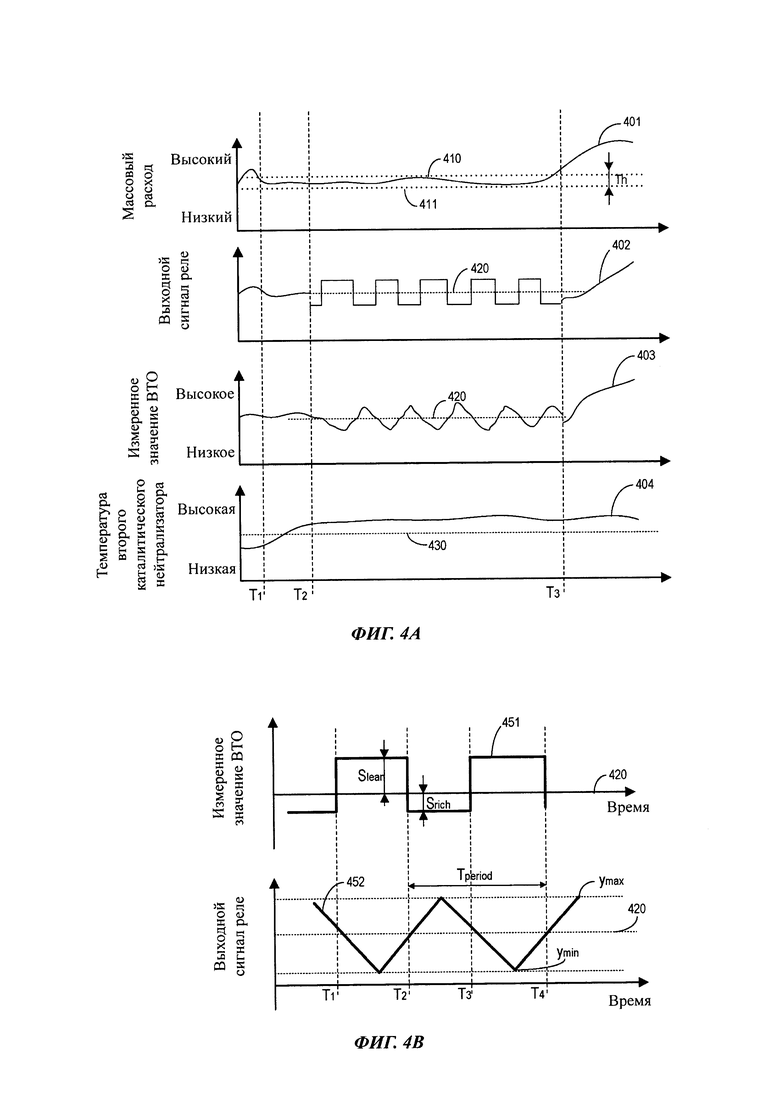
На фиг. 4 В представлены графики выходного сигнала 451 релейной функции и идеализированного значения 452 ВТО, измеренного ниже по потоку от первого каталитического нейтрализатора. По осям х отложено время, увеличивающееся слева направо. В момент T1 в ответ на отрицательное значение ошибки между заданным значением 420 ВТО и измеренным значением ВТО релейная функция производит обогащение на шаг обогащения Srich. В связи с этим сначала происходит отдаление измеренного значения ВТО от заданного значения 420 ВТО, а затем приближение к нему. В момент Т2 в ответ на изменение знака ошибки с отрицательного на положительный релейная функция производит обеднение на шаг обеднения Slean. Таким образом, измеренное значение ВТО осциллирует вокруг заданного значения ВТО. Выходной сигнал реле имеет форму прямоугольной волны, также осциллирующей вокруг заданного значения ВТО. Каждое пересечение измеренным значение 452 ВТО уровня заданного значения 420 ВТО может быть отслежено. Длительность временного интервала между такими пересечениями может быть измерена в качестве периода колебаний Tperiod. Также могут быть отслежены положительные пики ymax и отрицательные пики ymin. Разность между положительным пиком и отрицательным пиком может быть измерена в качестве амплитуды колебаний. Затем на основании периода и амплитуды в соответствии с уравнениями 1-2 могут быть вычислены значения системной задержки τd и системного усиления k:


На основании системной задержки и системного усиления в соответствии со способом 300 могут быть вычислены параметры управления. Подробная структура контроллера внешнего контура и вычисление его параметров управления приведены на фиг. 6.
Как показано на фиг. 3, на этапе 314 способа 300 может быть произведено обновление корректировочной таблицы, корректирующей базовую справочную таблицу. Значения базовой таблицы сохраняют в качестве известных значений для умеренно состаренного каталитического нейтрализатора, используемых для сравнения с текущим состоянием. Например, может быть произведено обновление значений усиления и задержки для текущего массового расхода, сохраненных в справочной таблице.
На этапе 315 способа 300 калибровку завершают путем подсоединения выхода контроллера внешнего контура ко входу внутреннего контура управления, причем управление каталитическим нейтрализатором производят в соответствии с обновленной справочной таблицей.
В соответствии с одним из вариантов осуществления справочная таблица может быть составлена в автономном режиме путем перевода системы в точку неустойчивости управления с обратной связью при разных значениях массового расхода. Другими словами, параметры управления или системные характеристики могут быть определены путем проведения идентификации системы при нескольких заранее определенных значениях массового расхода. Затем калиброванная справочная таблица может быть сохранена в долговременной памяти контроллера. Базовая справочная таблица, составленная в лабораторных условиях, может содержать все допустимые значения массового расхода, некоторые из которых могут быть недоступны в оперативном режиме. Кроме того, в системах, не содержащих второго каталитического нейтрализатора по соображениям стоимости или компоновки, обновление в оперативном режиме может быть невозможно.
На фиг. 4А представлены изменения во времени массового расхода 401, выходного сигнала 402 реле, значения ВТО 403, измеренного ниже по потоку от первого каталитического нейтрализатора и температуры 404 второго каталитического нейтрализатора.
Между моментами T1 и Т2 управление каталитическим нейтрализатором осуществляют посредством контроллера внешнего контура, причем параметры управления могут быть определены из загруженной справочной таблицы. Массовый расход 401 находится между пороговыми уровнями 410 и 411. Поскольку колебания массового расхода между моментами T1 и Т2 не превышают порогового значения Th, контроллер двигателя (например, контроллер 12 двигателя по фиг. 1) может определить, что двигатель работает в установившемся режиме. Могут быть проведены аналогичные проверки выполнения других условий (например, условий этапа 303 по фиг. 3), необходимых для обновления. Температура второго каталитического нейтрализатора ниже порогового уровня 430.
В момент Т2, поскольку двигатель работает в установившемся режиме, а температура второго каталитического нейтрализатора превосходит пороговый уровень 430, контроллер принимает решение о настройке параметров управления и переходит к управлению каталитическим нейтрализатором при помощи релейной функции, а не контроллера внешнего контура. Релейная функция вырабатывает прямоугольную волну, осциллирующую вокруг заданного значения ВТО 420. В связи с этим значение ВТО ниже по потоку от первого каталитического нейтрализатора осциллирует вокруг заданного значения ВТО 420.
К моменту ТЗ контроллер завершает калибровку параметров управления на основании колебаний измеренного значения ВТО 403 и выходного сигнала 402 реле. Управление каталитическим нейтрализатором осуществляют с использованием обновленных параметров управления.
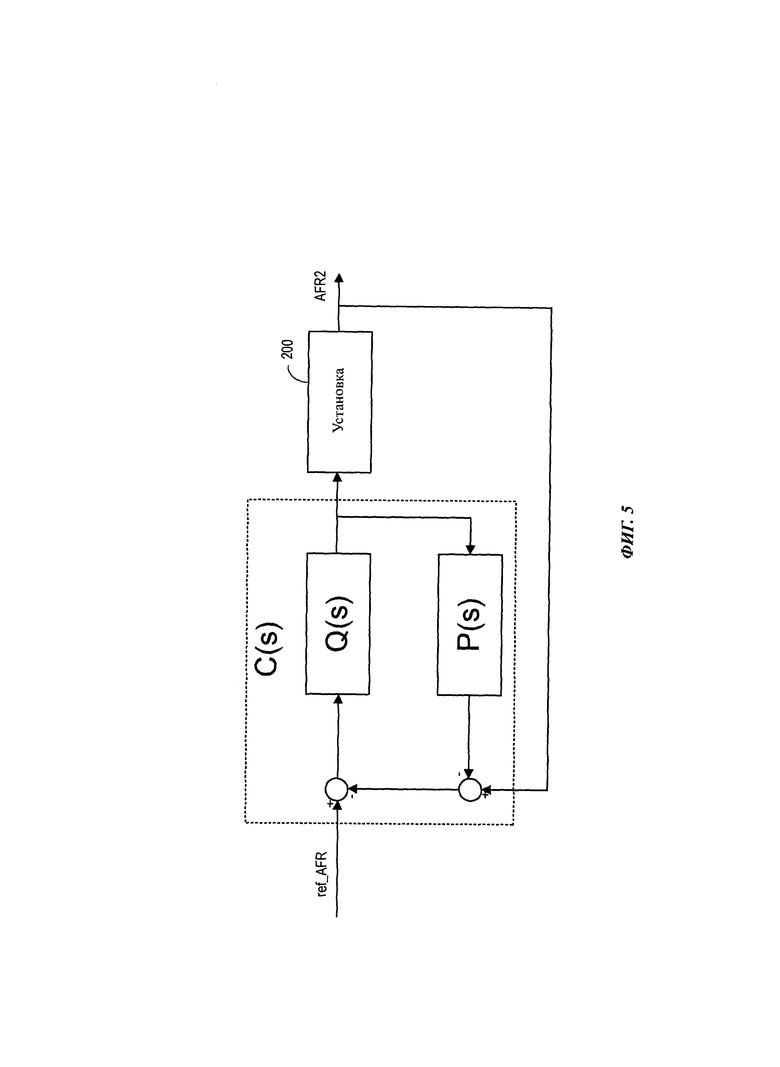
Параметры управления могут быть определены на основании системной задержки и системного усиления на основании управления с внутренней моделью (УВМ). На фиг. 5 представлен пример структуры управления с внутренней моделью. P(s) - передаточная функция установки 200. Функция P(s) может иметь следующую форму интегрирования усиления в зависимости от системной задержки т и системного усиления k:

Если Q(s) выбрана в качестве приблизительной обратной функции модели процесса без временной задержки:

то окончательное УВМ контроллера есть:

где

Параметр bw_mult обеспечивает возможность увеличения или уменьшения интенсивности управления. В соответствии с одним из примеров осуществления значение bw_mult может составлять от 2 до 5. Увеличение β может вызвать увеличение плавности сигнала, а уменьшение β может привести к более резкому изменению выходного сигнала системы. Другие параметры управления, в том числе recip_eta и halfsqalpha, могут быть вычислены в соответствии с уравнениями 7-8:


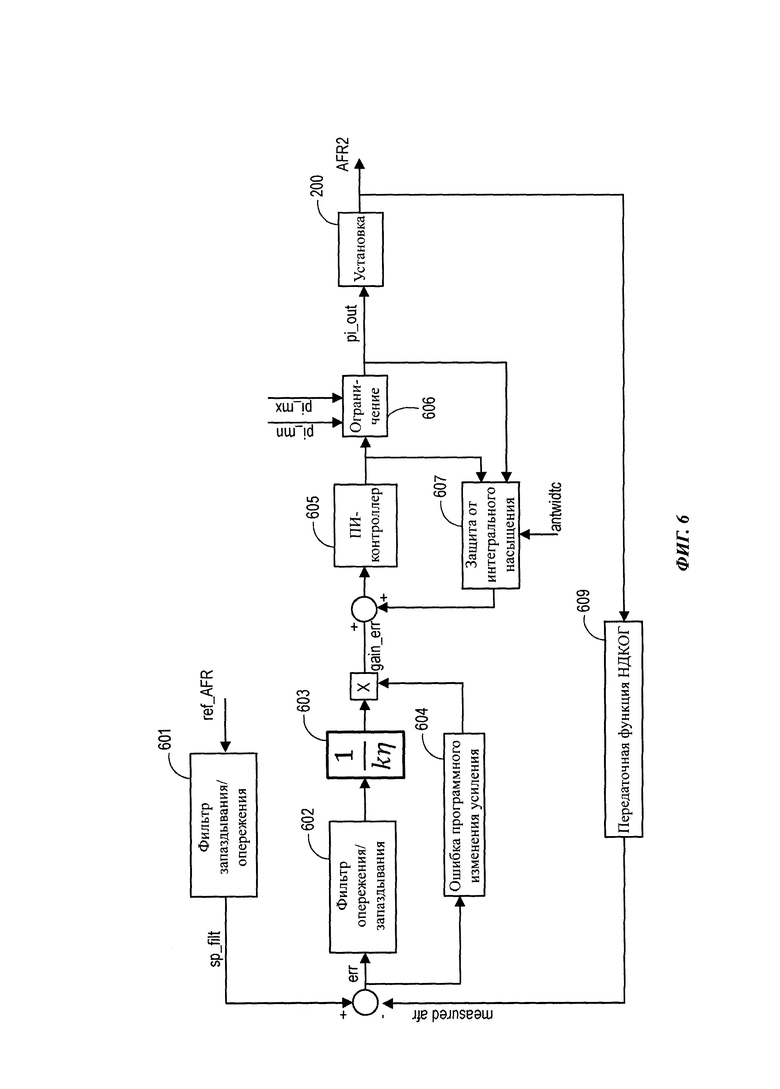
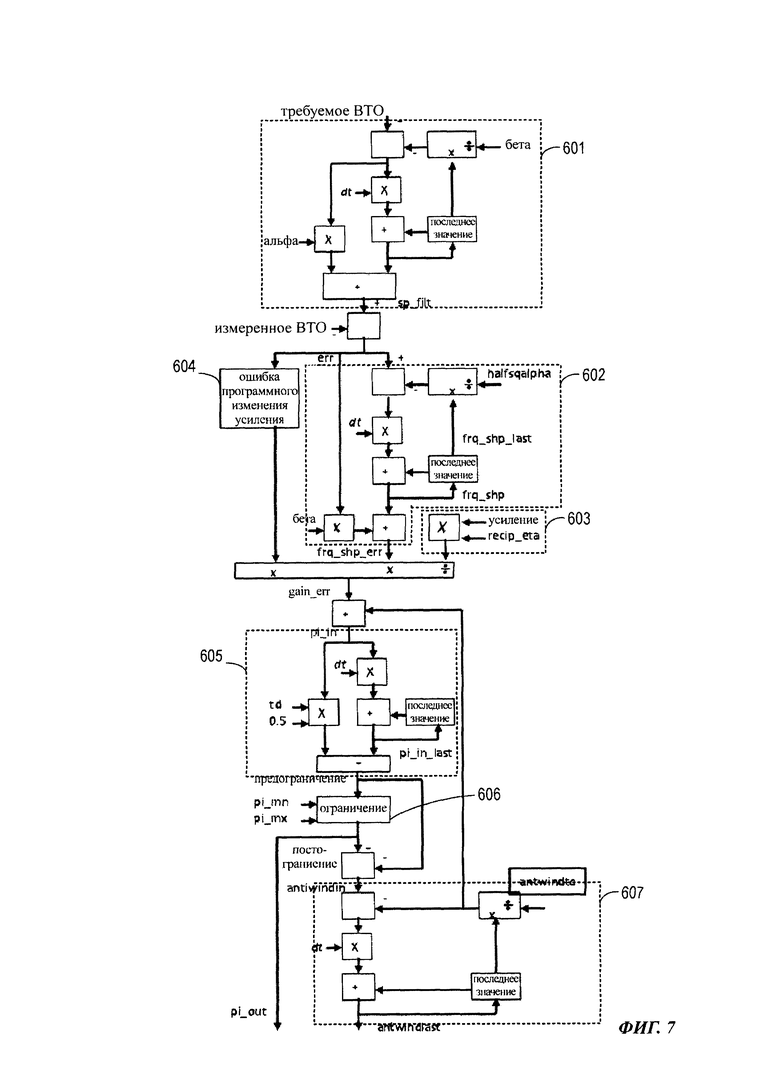
На фиг. 6 представлена функциональная схема, иллюстрирующая структуру контроллера внешнего контура, полученного посредством УВМ. Подробности осуществления контроллера внешнего контура во временной области представлены на фиг. 7, на которой модули, выполняющие те же функции, что и на фиг. 6, обозначены теми же ссылочными номерами.
Входящий сигнал ref_AFR сначала фильтруют посредством фильтра 601 запаздывания/опережения, а затем сравнивают с измеренным значением ВТО. Например, фильтр 601 запаздывания/опережения может иметь передаточную функцию  параметры α и β фильтрования которой вычисляют в соответствии с уравнением 6. За счет фильтрования требуемого сигнала ref_AFR ВТО на основании определения характеристик системы, динамика входящего сигнала может быть сглажена. Назначение этого фильтра состоит в замедлении эталонных команд, скорость которых превышает возможности адекватного управления с использованием обратной связи (в результате чего может возникать перерегулирование) в связи с чистой задержкой, возникающей в любой конкретной рабочей точке установки.
параметры α и β фильтрования которой вычисляют в соответствии с уравнением 6. За счет фильтрования требуемого сигнала ref_AFR ВТО на основании определения характеристик системы, динамика входящего сигнала может быть сглажена. Назначение этого фильтра состоит в замедлении эталонных команд, скорость которых превышает возможности адекватного управления с использованием обратной связи (в результате чего может возникать перерегулирование) в связи с чистой задержкой, возникающей в любой конкретной рабочей точке установки.
Отфильтрованное значение sp_filt ВТО сравнивают со значением AFR2 ВТО, измеренным ниже по потоку от первого каталитического нейтрализатора. Датчик, например НДКОГ, выдает сигнал AFR2 напряжения, соответствующий значению ВТО. Для осуществления сравнения со значением sp_filt выходной сигнал AFR2 датчика может быть обработан обратной функцией 609 НДКОГ с получением сигнала measured_afr измеренного ВТО. Передаточная функция НДКОГ преобразует сигнал напряжения в соответствующие сигнал ВТО. Производят вычисление ошибки err между sp_filt и measured_afr и передают ее на фильтр 602 опережения/запаздывания и в модуль 604 ошибки программного изменения усиления. Фильтр 602 опережения/запаздывания обеспечивает ограниченное количество упреждающих действий контроллера. Модуль 602 имеет передаточную функцию  Упреждающий фильтр 602 содержит проходную ветвь с коэффициентом усиления β для усиления сигнала при изменении ошибки. Фильтр 602 опережения/запаздывания также содержит рекурсивную ветвь в модуле 602 опережения/запаздывания, использующую параметр альфа и усиление задержки для ослабления эффекта пропускания через эту ветвь. Ошибка может быть нелинейной, отчасти в связи с преобразованием напряжения в ВТО при помощи передаточной функции НДКОГ, а отчасти в связи с общей нелинейностью системы. Модуль 604 ошибки программного изменения усиления взвешивает отрицательную и положительную ошибки по отдельности для увеличения линейности сигнала ошибки, если это необходимо. Выходной сигнал модуля 602 дополнительно корректируют в модуле 603 с учетом системного усиления (в соответствии с уравнением 5). Выходные сигналы модулей 603 и 604 объединяют в сигнал gain_err, который отражает обработку сигнала, применяемую к базовой ошибке (err).
Упреждающий фильтр 602 содержит проходную ветвь с коэффициентом усиления β для усиления сигнала при изменении ошибки. Фильтр 602 опережения/запаздывания также содержит рекурсивную ветвь в модуле 602 опережения/запаздывания, использующую параметр альфа и усиление задержки для ослабления эффекта пропускания через эту ветвь. Ошибка может быть нелинейной, отчасти в связи с преобразованием напряжения в ВТО при помощи передаточной функции НДКОГ, а отчасти в связи с общей нелинейностью системы. Модуль 604 ошибки программного изменения усиления взвешивает отрицательную и положительную ошибки по отдельности для увеличения линейности сигнала ошибки, если это необходимо. Выходной сигнал модуля 602 дополнительно корректируют в модуле 603 с учетом системного усиления (в соответствии с уравнением 5). Выходные сигналы модулей 603 и 604 объединяют в сигнал gain_err, который отражает обработку сигнала, применяемую к базовой ошибке (err).
Сигнал gain_err корректируют посредством итерационного члена, предотвращающего интегральное насыщение в случае достижения пределов выходного сигнала контроллера. Если контроллер не достигает насыщения, поправка к gain_err равна нулю. Скорректированный сигнал gain_err передают на ПИ-контроллер 605. ПИ-контроллер может иметь передаточную функцию  . Скорректированный сигнал gain_err может быть обработан во временной области двумя ветвями: простым управляющим членом, непосредственно зависящим от сигнала ошибки, основанного на системной задержке, и накопительной ветвью, в которой может быть осуществлен подсчет устойчивых ошибок. ПИ-контроллер выдает сигнал в ограничивающий модуль 606 и генерирует сигнал pi_out. Ограничивающий модуль ограничивает выходной сигнал ПИ-контроллера, задавая пределы pi_mn и pi_mx. Ограничивающий модуль предотвращает продолжение увеличения внутренних состояний управляющего члена в случае ограничения выходного сигнала управления. Перед ограничивающим модулем и после него сигнал поступает в модуль 607 предотвращения интегрального насыщения.
. Скорректированный сигнал gain_err может быть обработан во временной области двумя ветвями: простым управляющим членом, непосредственно зависящим от сигнала ошибки, основанного на системной задержке, и накопительной ветвью, в которой может быть осуществлен подсчет устойчивых ошибок. ПИ-контроллер выдает сигнал в ограничивающий модуль 606 и генерирует сигнал pi_out. Ограничивающий модуль ограничивает выходной сигнал ПИ-контроллера, задавая пределы pi_mn и pi_mx. Ограничивающий модуль предотвращает продолжение увеличения внутренних состояний управляющего члена в случае ограничения выходного сигнала управления. Перед ограничивающим модулем и после него сигнал поступает в модуль 607 предотвращения интегрального насыщения.
Сигнал pi_out поступает в установку 200 для принятия решений по подаче топлива. Например, контроллер может регулировать сигнал ДИВТ в виде математической зависимости от сигнала pi_out, и передавать его драйверу топливных инжекторов. После работы двигателя в установке 200 отработавшие газы проходят через первый каталитический нейтрализатор. Кислородный датчик измеряет ВТО и выдает значение AFR2.
Таким образом, параметры управления внешнего контура управления непосредственно соответствуют определенным параметрам модели, которые могут быть точно определены при лабораторных испытаниях в автономном режиме и обновлены в оперативном режиме для учета возможного старения каталитического нейтрализатора. Технический результат калибровки параметров управления при разных значениях массового расхода отработавших газов состоит в том, что управление с обратной связью обладает наибольшей точностью отклика без потери устойчивости несмотря на существенные изменения динамики системы в зависимости от массового расхода. Хотя использование одной лишь базовой таблицы параметров управления может быть достаточным (значение параметра bw_mult в уравнении 6 может быть выбрано достаточно осторожно), обновление параметров управления в оперативном режиме может обеспечить более точное соответствие работы контроллера данному транспортному средству, устраняя влияние непостоянства свойств и/или старения компонентов и повышая надежность управления с обратной связью. Технический результат регулирования ВТО ниже по потоку от каталитического нейтрализатора состоит в обеспечении возможности поддержания высокой эффективности каталитического нейтрализатора даже при наличии возмущений выше по потоку от него. Технический результат обновления параметров управления в оперативном режиме состоит в обеспечении возможности обновления параметров управления в ответ на старение системы, например старение каталитического нейтрализатора. Технический результат управления внутренним контуром при помощи релейной функции состоит в том, что идентификация системы может быть осуществлена путем возбуждения колебаний ВТО ниже по потоку от каталитического нейтрализатора. Посредством перевода управления с обратной связью в точку неустойчивости при работе двигателя в установившемся режиме обеспечивают возможность поддержания постоянного массового расхода во время калибровки параметров управления с минимальным влиянием на работу двигателя.
В соответствии с одним из вариантов осуществления изобретения способ эксплуатации системы двигателя содержит шаги, на которых: во время работы двигателя в установившемся режиме регулируют впрыск топлива в цилиндр в зависимости от данных обратной связи датчика, установленного ниже по потоку от объема каталитического нейтрализатора, на основании параметров управления, причем параметры управления определены на основании идентификации системы в точке неустойчивости управления с обратной связью. В соответствии с первым примером осуществления настоящего способа идентификация системы включает в себя определение системной задержки и системного усиления. В соответствии со вторым примером осуществления настоящего способа, который может включать в себя первый пример осуществления, в способе дополнительно регулируют впрыск топлива на основании воздушно-топливного отношения выше по потоку от объема каталитического нейтрализатора. В соответствии с третьим примером осуществления настоящего способа, который может включать в себя один или несколько примеров осуществления с первого по второй, в способе дополнительно определяют параметры управления на основании массового расхода выше по потоку от объема каталитического нейтрализатора. В соответствии с четвертым примером осуществления настоящего способа, который может включать в себя один или несколько примеров осуществления с первого по третий, в способе дополнительно определяют параметры управления, когда температура второго объема каталитического нейтрализатора, расположенного ниже по потоку от объема каталитического нейтрализатора, выше порогового значения. В соответствии с пятым примером осуществления настоящего способа, который может включать в себя один или несколько примеров осуществления с первого по четвертый, в способе дополнительно регулируют впрыск топлива на основании разности между фильтрованным эталонным воздушно-топливным отношением и данными обратной связи датчика, причем фильтрование эталонного воздушно топливного отношения осуществляют на основании параметров управления. В соответствии с шестым примером осуществления настоящего способа, который может включать в себя один или несколько примеров осуществления с первого по пятый, в способе дополнительно регулируют впрыск топлива, когда изменение требуемого крутящего момента двигателя за некоторый период времени меньше порогового значения.
В соответствии с другим вариантом осуществления изобретения способ эксплуатации двигателя содержит шаги, на которых: определяют количество впрыскиваемого топлива в зависимости от воздушно-топливного отношения ниже по потоку от каталитического нейтрализатора посредством контроллера обратной связи, причем параметры контроллера обратной связи определяют посредством справочной таблицы на основании массового расхода отработавших газов; и во время работы двигателя в установившемся режиме обновляют справочную таблицу на основании идентификации системы в точке неустойчивости управления с обратной связью. В соответствии с первым примером осуществления настоящего способа в способе дополнительно генерируют справочную таблицу в автономном режиме путем перевода системы в точку неустойчивости управления с обратной связью при каждом значении массового расхода отработавших газов в цилиндр. В соответствии со вторым примером осуществления настоящего способа, который может включать в себя первый пример осуществления, в способе дополнительно определяют параметры контроллера обратной связи на основании процедуры, обратной идентификации системы. В соответствии с третьим примером осуществления настоящего способа, который может включать в себя один или несколько примеров осуществления с первого по второй, в способе дополнительно определяют системную задержку и системное усиление во время идентификации системы. В соответствии с четвертым примером осуществления настоящего способа, который может включать в себя один или несколько примеров осуществления с первого по третий, усиление контроллера обратной связи увеличивается с уменьшением системного усиления. В соответствии с пятым примером осуществления настоящего способа, который может включать в себя один или несколько примеров осуществления с первого по четвертый, усиление контроллера обратной связи увеличивается с уменьшением системной задержки. В соответствии с шестым примером осуществления настоящего способа, который может включать в себя один или несколько примеров осуществления с первого по пятый, в способе дополнительно регулируют впрыск топлива посредством внутреннего контура обратной связи на основании воздушно-топливного отношения выше по потоку от каталитического нейтрализатора. В соответствии с седьмым примером осуществления настоящего способа, который может включать в себя один или несколько примеров осуществления с первого по шестой, в способе дополнительно переводят систему в точку неустойчивости управления с обратной связью путем управления внутренним контуром обратной связи посредством релейной функции в обход контроллера обратной связи.
В соответствии с другим вариантом осуществления изобретения система двигателя содержит: цилиндр; топливные инжекторы для впрыска топлива в цилиндр; первый каталитический нейтрализатор; второй каталитический нейтрализатор, присоединенный ниже по потоку от первого каталитического нейтрализатора; первый датчик для измерения первого воздушно-топливного отношения выше по потоку от первого каталитического нейтрализатора; второй датчик для измерения второго воздушно-топливного отношения между первым каталитическим нейтрализатором и вторым каталитическим нейтрализатором; и контроллер двигателя, выполненный с возможностью исполнения машиночитаемых инструкций, сохраненных в долговременной памяти, для: регулирования количества впрыскиваемого топлива на основании данных обратной связи, поступающих от первого датчика по внутреннему контуру обратной связи; регулирования количества впрыскиваемого топлива на основании данных обратной связи, поступающих от второго датчика по внешнему контуру обратной связи; и обновления параметров управления внешнего контура обратной связи посредством идентификации системы в точке неустойчивости управления с обратной связью при работе двигателя в установившемся режиме. В соответствии с первым примером осуществления настоящей системы контроллер двигателя дополнительно выполнен с возможностью определения параметров управления внешнего контура обратной связи посредством справочной таблицы. В соответствии со вторым примером осуществления настоящей системы, который может включать в себя первый пример осуществления, система дополнительно выполнена с возможностью возбуждения колебаний воздушно-топливного отношения ниже по потоку в точке неустойчивости управления с обратной связью. В соответствии с третьим примером осуществления настоящей системы, который может включать в себя один или несколько примеров осуществления с первого по второй, контроллер двигателя дополнительно выполнен с возможностью определения системного усиления и системной задержки на основании амплитуды и периода колебаний. В соответствии с четвертым примером осуществления настоящей системы, который может включать в себя один или несколько примеров осуществления с первого по третий, первый датчик представляет собой универсальный датчик кислорода в отработавших газах (УДКОГ), а второй датчик представляет собой нагреваемый датчик кислорода в отработавших газах (НДКОГ).
Следует отметить, что включенные в настоящую заявку примеры алгоритмов управления и оценки могут использоваться с разнообразными конфигурациями систем двигателей и/или транспортных средств. Раскрытые в настоящей заявке способы и алгоритмы управления могут храниться в виде исполняемых инструкций в долговременной памяти и могут исполняться системой управления, содержащей контроллеры в сочетании с различными датчиками, исполнительными устройствами и другими компонентами двигателя. Раскрытые в настоящей заявке конкретные алгоритмы могут представлять собой одну или любое количество стратегий обработки, таких как управляемые событиями, управляемые прерываниями, многозадачные, многопотоковые и т.д. Таким образом, проиллюстрированные разнообразные действия, операции и/или функции могут выполняться в указанной последовательности, параллельно, а в некоторых случаях - могут опускаться. Точно так же указанный порядок обработки необязательно требуется для достижения отличительных особенностей и преимуществ раскрытых в настоящей заявке вариантов осуществления изобретения, но служит для удобства иллюстрирования и описания. Одно или несколько из иллюстрируемых действий, операций и/или функций могут выполняться повторно в зависимости от конкретной применяемой стратегии. Кроме того, раскрытые действия, операции и/или функции могут графически изображать код, программируемый в долговременной памяти машиночитаемого носителя данных в системе управления двигателем, причем раскрытые действия выполняются путем исполнения инструкций в системе, содержащей различные аппаратные компоненты двигателя в сочетании с электронным контроллером.
Следует понимать, что раскрытые в настоящем описании конфигурации и алгоритмы по своей сути являются лишь примерами, и что конкретные варианты осуществления не должны рассматриваться в ограничительном смысле, ибо возможны разнообразные их модификации. Например, вышеизложенная технология может быть применена к двигателям со схемами расположения цилиндров V-6, I-4, I-6, V-12, в схеме с 4-мя оппозитными цилиндрами и в двигателях других типов. Объект настоящего изобретения включает в себя все новые и неочевидные комбинации и подкомбинации различных систем и схем, а также других отличительных признаков, функций и/или свойств, раскрытых в настоящем описании.
В нижеследующей формуле изобретения, в частности, указаны определенные комбинации и подкомбинации компонентов, которые считаются новыми и неочевидными. В таких пунктах формулы ссылка может быть сделана на «один» элемент или «первый» элемент или на эквивалентный термин. Следует понимать, что такие пункты могут включать в себя один или более указанных элементов, не требуя и не исключая двух или более таких элементов. Иные комбинации и подкомбинации раскрытых отличительных признаков, функций, элементов и/или свойств могут быть включены в формулу путем изменения имеющихся пунктов или путем представления новых пунктов формулы в настоящей или родственной заявке. Такие пункты формулы изобретения, независимо от того, являются они более широкими, более узкими, эквивалентными или отличающимися в отношении объема идеи первоначальной формулы изобретения, также считаются включенными в объект настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| НЕИНТРУЗИВНАЯ ДИАГНОСТИКА ДАТЧИКА ВОЗДУШНО-ТОПЛИВНОГО ОТНОШЕНИЯ | 2017 |
|
RU2683285C1 |
| СПОСОБ УПРАВЛЕНИЯ И ДИАГНОСТИКИ ДВИГАТЕЛЯ | 2015 |
|
RU2672550C2 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ПРЕДЕЛЬНОГО УРОВНЯ ДЕГРАДАЦИИ КАТАЛИТИЧЕСКОГО НЕЙТРАЛИЗАТОРА (ВАРИАНТЫ) | 2015 |
|
RU2701626C2 |
| Способ и система для идентификации и уменьшения дисбаланса воздушно-топливного отношения | 2016 |
|
RU2720176C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ВНУТРЕННЕГО СГОРАНИЯ | 2015 |
|
RU2689500C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ДИСБАЛАНСА ТОПЛИВНО-ВОЗДУШНОЙ СМЕСИ В ЦИЛИНДРЕ ДВИГАТЕЛЯ (ВАРИАНТЫ) | 2015 |
|
RU2695237C2 |
| СПОСОБ ДЛЯ ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ДВИГАТЕЛЯ | 2015 |
|
RU2678609C2 |
| ДВУХСТАДИЙНОЕ ВОССТАНОВЛЕНИЕ КАТАЛИТИЧЕСКОГО НЕЙТРАЛИЗАТОРА | 2014 |
|
RU2669538C2 |
| ДАТЧИК ВЛАЖНОСТИ ОТРАБОТАВШИХ ГАЗОВ И СПОСОБ РАБОТЫ ДВИГАТЕЛЯ | 2013 |
|
RU2628105C2 |
| СПОСОБ ДЛЯ ВЫХЛОПА ДВИГАТЕЛЯ, СИСТЕМА И СПОСОБ ДЛЯ ДВИГАТЕЛЯ | 2013 |
|
RU2633329C2 |
Изобретение относится к транспортной технике, более подробно к способам управления двигателем. Предложены способы и системы для управления каталитическим нейтрализатором. В соответствии с одним из примеров осуществления способ может включать в себя регулирование воздушно-топливного отношения ниже по потоку от каталитического нейтрализатора посредством регулирования впрыска топлива. Впрыск топлива регулируют на основании параметров управления, обновленных в оперативном режиме посредством идентификации системы в точке неустойчивости управления с обратной связью. Технический результат – повышение эффективности каталитического нейтрализатора в широком диапазоне условий работы двигателя. 3 н. и 16 з.п. ф-лы, 8 ил.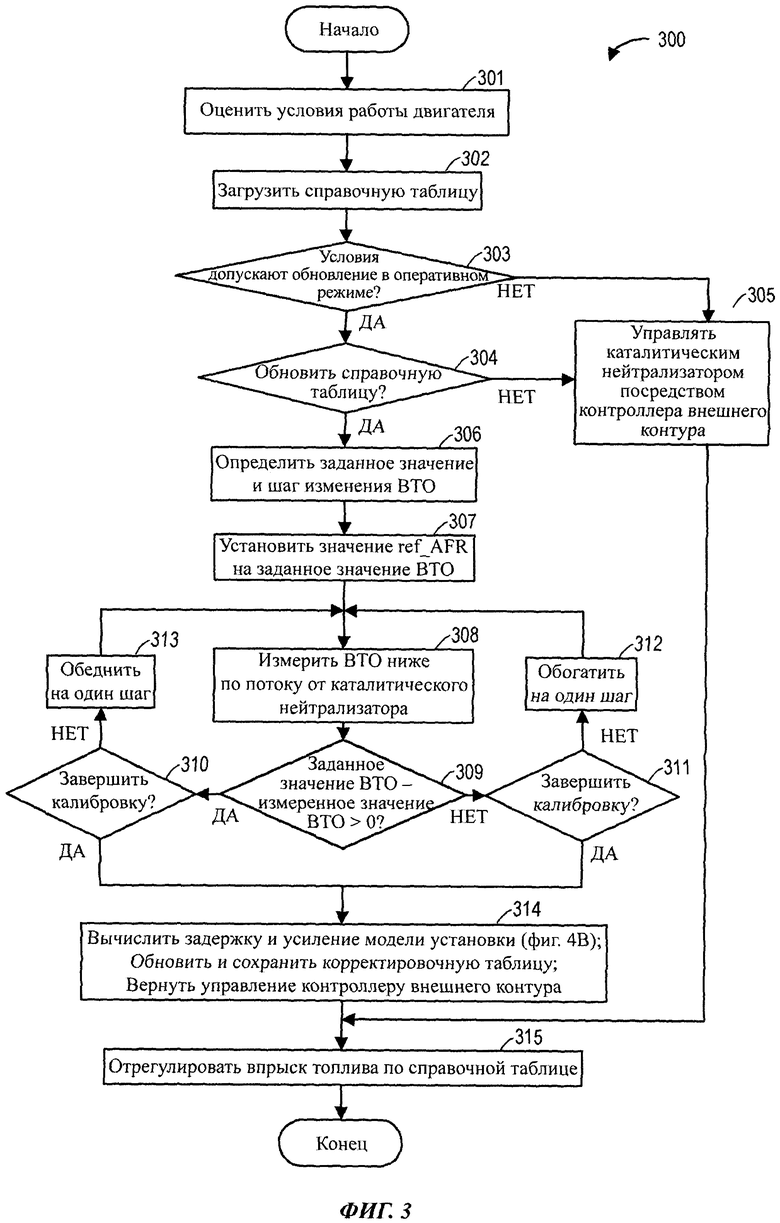
1. Способ эксплуатации системы двигателя, в котором: во время работы двигателя в установившемся режиме регулируют впрыск топлива в цилиндр в зависимости от данных обратной связи датчика, установленного ниже по потоку от объема каталитического нейтрализатора, на основании параметров управления, причем параметры управления определены на основании идентификации системы в точке неустойчивости управления с обратной связью; и регулируют впрыск топлива, когда изменение требуемого крутящего момента двигателя за некоторый период времени меньше порогового значения.
2. Способ по п. 1, в котором идентификация системы включает в себя определение системной задержки и системного усиления.
3. Способ по п. 1, в котором дополнительно регулируют впрыск топлива на основании воздушно-топливного отношения выше по потоку от объема каталитического нейтрализатора.
4. Способ по п. 1, в котором дополнительно определяют параметры управления на основании массового расхода выше по потоку от объема каталитического нейтрализатора.
5. Способ по п. 1, в котором дополнительно определяют параметры управления, когда температура второго объема каталитического нейтрализатора, расположенного ниже по потоку от объема каталитического нейтрализатора, выше порогового значения.
6. Способ по п. 1, в котором дополнительно регулируют впрыск топлива на основании разности между фильтрованным эталонным воздушно-топливным отношением и данными обратной связи датчика, причем фильтрование эталонного воздушно топливного отношения осуществляют на основании параметров управления.
7. Способ эксплуатации системы двигателя, в котором: определяют количество впрыскиваемого топлива в зависимости от воздушно-топливного отношения ниже по потоку от каталитического нейтрализатора посредством контроллера обратной связи, причем параметры контроллера обратной связи определяют посредством справочной таблицы на основании массового расхода отработавших газов; и во время работы двигателя в установившемся режиме обновляют справочную таблицу на основании идентификации системы в точке неустойчивости управления с обратной связью.
8. Способ по п. 7, в котором дополнительно генерируют справочную таблицу в автономном режиме путем перевода системы в точку неустойчивости управления с обратной связью при каждом значении массового расхода отработавших газов.
9. Способ по п. 7, в котором дополнительно определяют параметры контроллера обратной связи на основании процедуры, обратной идентификации системы.
10. Способ по п. 9, в котором дополнительно определяют системную задержку и системное усиление во время идентификации системы.
11. Способ по п. 10, в котором усиление контроллера обратной связи увеличивается с уменьшением системного усиления.
12. Способ по п. 10, в котором усиление контроллера обратной связи увеличивается с уменьшением системной задержки.
13. Способ по п. 7, в котором дополнительно регулируют впрыск топлива посредством внутреннего контура обратной связи на основании воздушно-топливного отношения выше по потоку от каталитического нейтрализатора.
14. Способ по п. 13, в котором дополнительно переводят систему в точку неустойчивости управления с обратной связью путем управления внутренним контуром обратной связи посредством релейной функции в обход контроллера обратной связи.
15. Система двигателя, содержащая: цилиндр; топливные инжекторы для впрыска топлива в цилиндр; первый каталитический нейтрализатор; второй каталитический нейтрализатор, присоединенный ниже по потоку от первого каталитического нейтрализатора; первый датчик для измерения первого воздушно-топливного отношения выше по потоку от первого каталитического нейтрализатора; второй датчик для измерения второго воздушно-топливного отношения между первым каталитическим нейтрализатором и вторым каталитическим нейтрализатором; и контроллер двигателя, выполненный с возможностью исполнения машиночитаемых инструкций, сохраненных в долговременной памяти, для регулирования количества впрыскиваемого топлива на основании данных обратной связи, поступающих от первого датчика по внутреннему контуру обратной связи; регулирования количества впрыскиваемого топлива на основании данных обратной связи, поступающих от второго датчика по внешнему контуру обратной связи; и обновления параметров управления внешнего контура обратной связи посредством идентификации системы в точке неустойчивости управления с обратной связью при работе двигателя в установившемся режиме.
16. Система по п. 15, в которой контроллер двигателя дополнительно выполнен с возможностью определения параметров управления внешнего контура обратной связи посредством справочной таблицы.
17. Система по п. 15, дополнительно выполненная с возможностью возбуждения колебаний воздушно-топливного отношения ниже по потоку в точке неустойчивости управления с обратной связью.
18. Система по п. 17, в которой контроллер двигателя дополнительно выполнен с возможностью определения системного усиления и системной задержки на основании амплитуды и периода колебаний.
19. Система по п. 15, в которой первый датчик представляет собой универсальный датчик кислорода в отработавших газах (УДКОГ), а второй датчик представляет собой нагреваемый датчик кислорода в отработавших газах (НДКОГ).
| US 2004050034 А1, 2004.03.18 | |||
| US 2004249556 А1, 09.12.2004 | |||
| US 2004244363 А1, 09.12.2004 | |||
| СПОСОБ НАБЛЮДЕНИЯ И РЕГУЛИРОВАНИЯ СИСТЕМЫ ДООЧИСТКИ ВЫХЛОПНЫХ ГАЗОВ | 2012 |
|
RU2549389C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ СОСТАВА ГОРЮЧЕЙ СМЕСИ, СИСТЕМА ВЫПУСКА ОТРАБОТАВШИХ ГАЗОВ, ПРЕДНАЗНАЧЕННАЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, И ТРАНСПОРТНОЕ СРЕДСТВО С ТАКОЙ СИСТЕМОЙ | 2005 |
|
RU2395697C2 |

