Область техники, к которой относится изобретение
Настоящее изобретение относится, в целом, к диагностике деградации датчика отработавших газов в моторном транспортном средстве.
Уровень техники
В результате усиления государственного регулирования автомобильных выбросов, современные транспортные средства используют трехкомпонентный каталитический нейтрализатор (ТКН) для дополнительной обработки отработавших газов двигателя. Оксид церия обычно добавляют в каталитический нейтрализатор для химического накопления кислорода и содействия в уменьшении выбросов посредством увеличения рабочего окна приблизительно стехиометрического воздушно-топливного отношения (ВТО). ТКН могут поддерживать требуемой дробной степени окисления (ДСО) в зависимости от датчиков отслеживания каталитического нейтрализатора и/или основанных на физических процессах моделей каталитического нейтрализатора. Например, некоторые транспортные средства содержат универсальный датчик кислорода в отработавших газах (УДКОГ), расположенный выше по потоку от ТКН, и нагреваемый датчик кислорода отработавших газов (НДКОГ), расположенный ниже по потоку от ТКН, для поддержания ВТО и ДСО каталитического нейтрализатора на заданных значениях. В частности, расположенный выше по потоку датчик УДКОГ обеспечивает обратную связь для регулирования отработавших газов двигателя с целью поддержания их приблизительно стехиометрического состава. Расположенный ниже по потоку датчик НДКОГ обеспечивает обратную связь для смещения ВТО двигателя к обогащению или обеднению для увеличения эффективности каталитического нейтрализатора. Кроме того, расположенный ниже по потоку датчик НДКОГ может быть использован для диагностики каталитического нейтрализатора.
Деградация датчика НДКОГ может привести к увеличению расхода топлива и выбросов. Один существующий интрузивный подход для диагностики деградации датчика НДКОГ заключается в активном регулировании работы двигателя для сбора данных о характеристиках датчика НДКОГ. Например, работу двигателя могут активно регулировать для осуществления одного или нескольких переходов от обогащения к обеднению или от обеднения к обогащению, чтобы отследить отклик датчика НДКОГ на данные переходы. Другой существующий подход, который является неинтрузивным, раскрыт в патентном документе U.S. 5,801,295. В данном документе выходное напряжение датчика НДКОГ отслеживают при соблюдении конкретных входных условий, при этом сегменты развертки регистрируемого напряжения суммируют за определенный период времени. Длину просуммированной развертки напряжения датчика НДКОГ сравнивают с пороговой длиной; длина развертки меньше пороговой длины указывает на снижение чувствительности и надежности датчика НДКОГ.
Однако авторы настоящего изобретения выявили потенциальные проблемы таких подходов. Например, в интрузивном подходе требуемые отклонения от нормальной работы двигателя могут быть ограничены конкретными условиями работы, которые не возникают достаточно часто для точного отслеживания датчика. Дополнительно, данные отклонения могут увеличить продолжительность работы двигателя при нежелательном ВТО, что приводит к увеличению расхода топлива и/или увеличению выбросов. В неинтрузивном подходе для выполнения диагностики, должны быть соблюдены различные входные условия, так что деградация датчика НДКОГ может оставаться незамеченной в течение продолжительного периода времени, что негативно влияет на характеристики двигателя. В дополнение к этому, поскольку данный подход связывает только снижение частоты переключений с деградацией датчика НДКОГ, некоторые виды деградации датчика НДКОГ, которые не влияют на частоту переключений, могут быть не замечены.
Раскрытие сущности изобретения
Авторами настоящего изобретения предложены способы и системы, которые устраняют недостатки приведенных выше подходов. В одном из примеров, проблемы, раскрытые выше, могут быть устранены посредством способа, в котором определяют скорость изменения ДСО каталитического нейтрализатора отработавших газов и скорость изменения выходного напряжения датчика кислорода, расположенного ниже по потоку от каталитического нейтрализатора. Если отношение скорости изменения ДСО к скорости изменения выходного напряжения является положительным, то способ включает в себя указание неисправности датчика кислорода и управление работой двигателя независимо от выходного напряжения датчика кислорода. Соответственно, диагностика неисправности датчика НДКОГ может быть выполнена в любой момент времени, когда двигатель прогрет и работает в стационарном состоянии, в отличии от интрузивного подхода, раскрытого выше, в котором диагностика может быть выполнена только в конкретных условиях работы двигателя, которые возникают не часто и должны часто возбуждаться. Также, способы и системы, представленные в данном раскрытии, обеспечивают исключительно надежную диагностику, поскольку они не учитывают абсолютные значения интересуемых параметров (например, абсолютное значение ДСО и абсолютное значение выходного напряжения датчика НДКОГ), а сфокусированы на знаке отношения скорости изменения ДСО к скорости изменения выходного напряжения датчика НДКОГ. Таким образом, технический результат способов и систем, раскрытых в данном документе, заключается в надежной диагностике неисправности датчика НДКОГ, которая может быть выполнена посредством отслеживания знака отношения скорости изменения ДСО к скорости изменения выходного напряжения датчика НДКОГ.
Следует понимать, что вышеприведенное краткое раскрытие изобретения служит лишь для ознакомления в простой форме с некоторыми концепциями, которые далее будут раскрыты подробно в разделе «Осуществление изобретения». Это раскрытие не предназначено для обозначения ключевых или существенных отличительных признаков заявленного объекта изобретения, объем которого однозначно определен формулой изобретения, приведенной после раздела «Осуществление изобретения». Кроме того, заявленный объект изобретения не ограничен вариантами осуществления, которые устраняют какие-либо недостатки, указанные выше или в любой другой части настоящего раскрытия.
Краткое описание чертежей
На Фиг. 1. показано схематическое представление двигателя и связанной с ним выпускной системы отработавших газов транспортного средства.
На Фиг. 2А показана структурная схема, отображающая пример архитектуры управления.
На Фиг. 2В показана структурная схема, отображающая основанные на физических процессах модели двигателя и ТКН.
На Фиг. 3 показан пример блок-схемы, отображающей способ вычисления ДСО каталитического нейтрализатора с использованием основанной на физических процессах модели ТКН.
На Фиг. 4А показан график, отображающий ДСО каталитического нейтрализатора, как функцию от ВТО.
На Фиг. 4В показан график, отображающий отношение между ВТО и выходным напряжением расположенного внизу по потоку датчика НДКОГ.
На Фиг. 5 показан пример блок-схемы, отображающей способ неинтрузивной диагностики неисправности датчика НДКОГ на основании знака отношения изменения ДСО каталитического нейтрализатора к изменению выходного напряжения датчика НДКОГ.
На Фиг. 6-7 показан пример временных диаграмм, демонстрирующих обнаружение неисправности датчика НДКОГ согласно способу, представленному на Фиг. 5.
Осуществление изобретения
Нижеследующее раскрытие относится к системам и способам для неинтрузивной диагностики деградации датчика НДКОГ в транспортном средстве. Как показано на Фиг. 1, транспортное средство может быть выполнено с ТКН для дополнительной обработки отработавших газов в дополнение к датчикам кислорода в отработавших газах, расположенным выше и ниже по потоку от каталитического нейтрализатора. Работой двигателя могут управлять на основании сигнала обратной связи от указанных датчиков кислорода в отработавших газах, как показано на Фиг. 2А, для достижения требуемого ВТО и минимизации нежелательных выбросов отработавших газов. В соответствии со способом, показанным на Фиг. 3, ДСО каталитического нейтрализатора может быть вычислена контроллером двигателя посредством основанных на физических процессах моделей двигателя и каталитического нейтрализатора, например показанных на Фиг. 2В, и удержана в заданной точке. Взаимосвязь между ВТО и ДСО каталитического нейтрализатора показана на Фиг. 4А, а взаимосвязь между ВТО и выходным сигналом от расположенного ниже по потоку датчика НДКОГ показана на Фиг. 4В. Как показано на Фиг. 5, контроллер может быть выполнен с возможностью указания деградации датчика НДКОГ на основании знака отношения изменения ДСО каталитического нейтрализатора за некоторый период времени к изменению выходного напряжения датчика НДКОГ за указанный период времени. На Фиг. 6 показан пример диагностики датчика НДКОГ, выполняемой при исправном функционировании датчика УДКОГ, а на Фиг. 7 показан пример диагностики датчика НДКОГ при наличии деградации датчика УДКОГ.
На Фиг. 1 показан схематический чертеж, отображающий один цилиндр многоцилиндрового двигателя 10, который может быть включен в состав системы 1 двигателя. Система 1 двигателя может быть движительной системой, включенной в состав моторного транспортного средства 5. Управление двигателем 10, по меньшей мере частично, может быть осуществлено при помощи системы управления, содержащей контроллер 12, и посредством входного сигнала от оператора 132 транспортного средства через устройство 130 ввода. В данном примере устройство 130 ввода включает в себя педаль акселератора и датчик 134 положения педали для генерирования сигнала ПП, пропорционального положению педали. Камера сгорания (например, цилиндр) 30 двигателя 10 может содержать стенки 32 камеры сгорания с расположенным в ней поршнем 36. Поршень 36 может быть соединен с коленчатым валом 40 так, чтобы возвратно-поступательное движения поршня преобразовывалось во вращательное движение коленчатого вала. Коленчатый вал 40 может быть соединен по меньшей мере с одним ведущим колесом транспортного средства при помощи системы промежуточной системы трансмиссии. Также, стартерный электродвигатель может быть соединен с коленчатым валом 40 через маховик для обеспечения запуска двигателя 10.
Камера 30 сгорания может получать впускной воздух из впускного коллектора 44 через впускной канал 42 и может выпускать газы сгорания через выпускной канал 48. Впускной коллектор 44 и выпускной канал 48 могут выборочно сообщаться с камерой 30 сгорания посредством соответствующих впускного клапана 52 и выпускного клапана 54. В некоторых вариантах осуществления камера 30 сгорания может содержать два или более впускных клапанов и/или два или более выпускных клапанов. В данном примере впускным клапаном 52 и выпускным клапаном 54 могут управлять при помощи кулачкового привода посредством одного или нескольких кулачков и могут использовать одну или несколько из следующих систем: переключения профиля кулачков (ППК), изменения фаз кулачкового распределения (ИФКР), изменения фаз клапанного газораспределения (ИФКГ) и/или изменения высоты подъема клапанов (ИВПК), которые контроллер 12 может применять для изменения работы клапанов. Положение впускного клапана 52 и выпускного клапана 54 может быть определено с помощью датчиков 55 и 57 положения, соответственно. В альтернативных вариантах осуществления впускным клапаном 52 и/или выпускным клапаном 54 могут управлять посредством электрического привода клапанов. Например, в качестве альтернативы, цилиндр 30 может содержать впускной клапан, управляемый посредством электрического привода клапана, и выпускной клапан, управляемый посредством кулачкового привода, в том числе систем ППК и/или ИФКР.
В некоторых вариантах осуществления каждый цилиндр двигателя 10 может быть выполнен с одним или несколькими топливными инжекторами для подачи топлива в цилиндр. В качестве неограничивающего примера, цилиндр 30 показан содержащим один топливный инжектор 66, который обеспечивает подачу топлива из топливной системы 172. Топливный инжектор 66 показан соединенным непосредственно с цилиндром 30 для непосредственного впрыска топлива в цилиндр в количестве, пропорциональном длительности импульса сигнала ДИВТ, получаемого от контроллера 12 через электронный драйвер 68. Таким образом, топливный инжектор 66 обеспечивает так называемый непосредственный впрыск топлива (далее также упоминаемый как «НВ») в цилиндр 30 сгорания.
Следует понимать, что в альтернативном варианте осуществления, инжектор 66 может быть инжектором распределенного впрыска топлива, обеспечивающим впрыск топлива во впускные окна выше по потоку от цилиндра 30. Следует также понимать, что цилиндр 30 может получать топливо из множества инжекторов, например множества инжекторов распределенного впрыска топлива, множества инжекторов непосредственного впрыска или их комбинации.
Как следует из Фиг. 1, впускной канал 42 может содержать дроссель 62, имеющий дроссельную заслонку 64. В данном конкретном примере положение дроссельной заслонки 64 может быть изменено контроллером 12 посредством сигнала, подаваемого на электромотор или исполнительный механизм, входящий вместе с дросселем 62 в состав конфигурации, которую обычно называют электронным управлением дросселем (ЭУД). Таким образом, дроссель 62 может использоваться для изменения количества впускного воздуха, поступающего в камеру 30 сгорания, а также в другие цилиндры двигателя. Положение дроссельной заслонки 64 может быть передано на контроллер 12 посредством сигнала ПД положения дросселя. Впускной канал 42 может содержать датчик 120 массового расхода воздуха и датчик 122 давления воздуха в коллекторе для подачи соответствующих сигналов МРВ и ДВК контроллеру 12.
Система 88 зажигания может обеспечивать искру зажигания в камере 30 сгорания посредством свечи 92 зажигания в ответ на сигнал ОЗ опережения зажигания от контроллера 12 при выбранных режимах работы. Несмотря на то, что показаны компоненты искрового зажигания, в некоторых вариантах осуществления камера 30 сгорания, или одна или несколько других камер сгорания двигателя 10 могут работать в режиме воспламенения от сжатия, с искрой зажигания или без нее.
Расположенный выше по потоку датчик 126 отработавших газов показан соединенным с выпускным каналом 48 выше по потоку от устройства 70 снижения токсичности выбросов. Расположенный выше по потоку датчик 126 может быть любым подходящим датчиком для обеспечения показаний ВТО отработавших газов, например линейным широкодиапазонным датчиком кислорода или УДКОГ, двухпозиционным узкодиапазонным датчиком кислорода или ДКОГ, НДКОГ, или датчиком NOx, датчиком углеводородов, или датчиком СО. В неограничивающих вариантах осуществления, раскрытых в данном документе, расположенный выше по потоку датчик 126 отработавших газов является датчиком УДКОГ, выполненным с возможностью обеспечения выходного сигнала, например, сигнала напряжения, который пропорционален количеству кислорода, присутствующему в отработавших газах. Контроллер 12 выполнен с возможностью использования данного выходного сигнала для определения ВТО отработавших газов.
Устройство 70 снижения токсичности выбросов показано расположенным в выпускном канале 48 ниже по потоку от датчика 126 отработавших газов. В неограничивающих вариантах осуществления, раскрытых в данном документе, устройство 70 является ТКН, выполненным с возможностью уменьшения количества NOx, а также окисления СО и несгоревших углеводородов. В других вариантах осуществления, однако, устройство 70 может быть ловушкой NOx, различными другими устройствами снижения токсичности выбросов или их комбинациями.
Второй, расположенный ниже по потоку, датчик 128 отработавших газов показан соединенным с выпускным каналом 48 ниже по потоку от устройства 70 снижения токсичности выбросов. Расположенный ниже по потоку датчик 128 может быть любым подходящим датчиком для обеспечения показаний ВТО отработавших газов, например, датчиком УДКОГ, датчиком ДКОГ, датчиком НДКОГ и т.д. В неограничивающих вариантах осуществления, раскрытых в данном документе, расположенный ниже по потоку датчик 128 является датчиком НДКОГ, выполненным с возможностью указания относительно обогащения или обеднения отработавших газов после прохождения через каталитический нейтрализатор. Датчик НДКОГ может обеспечивать выходной сигнал в виде точки переключения или сигнала напряжения в точке, в которой отработавший газ переключается с обеднения на обогащение.
Дополнительно, в раскрытых вариантах осуществления, система рециркуляции отработавших газов (РОГ) может направлять требуемую часть отработавших газов из выпускного канала 48 во впускной канал 42 через канал 140 РОГ. Количество потока РОГ, поступающего во впускной канал 42, может быть изменено контроллером 12 посредством клапана 142 РОГ. Дополнительно, датчик 144 РОГ может быть расположен внутри канала РОГ и может обеспечивать показания одного или нескольких параметров: давления, температуры и концентрации отработавших газов. В некоторых условиях система РОГ может быть использована для регулирования температуры воздуха и топливной смеси внутри камеры сгорания.
Контроллер 12 показан на Фиг. 1 в виде микрокомпьютера, содержащего микропроцессорное устройство 102, порты 104 ввода/вывода, электронный носитель информации для исполняемых программ и калибровочных значений, показанный в виде микросхемы 106 постоянного запоминающего устройства в данном конкретном примере, оперативное запоминающее устройство 108, энергонезависимое запоминающее устройство 110, и шину данных. Контроллер 12 может получать различные сигналы от датчиков, соединенных с двигателем 10, в дополнение к сигналам, рассмотренным ранее, в том числе измерение массового расхода всасываемого воздуха (МРВ) от датчика 120 массового расхода воздуха, температуру охлаждающей жидкости двигателя (ТОЖД) от датчика 112 температуры, соединенного с охлаждающей рубашкой 114, сигнал профиля зажигания (ПЗ) от датчика 118 на эффекте Холла (или датчика другого типа), соединенного с коленчатым валом 40, положение дросселя (ПД) от датчика положения дросселя, сигнал абсолютного давления в коллекторе (ДВК) от датчика 122, выходной сигнал датчика УДКОГ от датчика 126 УДКОГ и выходной сигнал НДКОГ от датчика 128 НДКОГ. Сигнал частоты вращения двигателя (ЧВД) может быть сгенерирован посредством контроллера 12 из сигнала ПЗ.
Постоянное запоминающее устройство 106 хранения данных может быть запрограммировано машиночитаемыми данными, представляющими долговременные инструкции, исполняемые процессором 102 для осуществления раскрытых ниже способов, так же, как и других вариантов, которые предполагаются, но не указаны конкретно.
В некоторых примерах транспортное средство 5 может быть гибридным транспортным средством с несколькими источниками крутящего момента для одного или нескольких колес 55 транспортного средства. В других примерах транспортное средство 5 является обычным транспортным средством с одним двигателем, или электрическим транспортным средством с электродвигателем (электродвигателями). В данном примере показано транспортное средство 5, содержащее двигатель 10 и электродвигатель 52. Электродвигатель 52 может представлять собой обычный электромотор или мотор-генератор. Коленчатый вал 140 двигателя 10 и электродвигатель 52 соединены посредством трансмиссии 54 с колесами 55 транспортного средства при вводе в зацепление одной или нескольких муфт 56. В представленном примере, первая муфта 56 установлена между коленчатым валом 140 и электродвигателем 52, а вторая муфта 56 установлена между электродвигателем 52 и трансмиссией 54. Контроллер 12 может отправлять сигнал к исполнительному механизму каждой из муфт 56 для ввода в зацепление или вывода из зацепления муфты, соединяя, таким образом, или разъединяя коленчатый вал 140 от электродвигателя 52 и компонентов, соединенных с ней, и/или соединяя или разъединяя электродвигатель 52 от трансмиссии 54 и компонентов, соединенных с ней. Трансмиссия 54 может быть зубчатой коробкой передач, планетарной системой передач, или трансмиссией другого типа. Силовой агрегат может быть выполнен различным образом, в том числе в виде параллельного, последовательного или параллельно-последовательного гибридного транспортного средства.
Электродвигатель 52 получает электроэнергию от тяговой аккумуляторной батареи 58 для обеспечения крутящего момента колесам 55 транспортного средства. Электродвигатель 52 может также эксплуатироваться в качестве генератора для обеспечения электроэнергии для зарядки аккумуляторной батареи 58, например во время торможения.
Как раскрыто выше, на Фиг. 1 представлен только один цилиндр многоцилиндрового двигателя, и каждый цилиндр может также содержать собственный набор впускных/выпускных клапанов, топливный инжектор (инжекторы), свечу (свечи) зажигания и т.д.
На Фиг. 2А показана структурная схема, отображающая архитектуру 200 управления, которая может быть реализована посредством контроллера двигателя, например контроллера 12, представленного на Фиг. 1. Архитектура 200 управления, включает в себя двигатель 227, датчик 230 УДКОГ, расположенный выше по потоку от ТКН 235, и датчик 240 НДКОГ, расположенный ниже по потоку от ТКН 235. Двигатель 227 может быть соответствующим двигателю 10, представленному на Фиг. 1; датчик 230 УДКОГ может быть соответствующим датчику 126 УДКОГ, представленному на Фиг. 1; ТКН 235 может быть соответствующим ТКН 70, представленному на Фиг. 1; и датчик 240 НДКОГ может быть соответствующим датчику 128 НДКОГ, представленному на Фиг. 1. Архитектура 200 управления каталитическим нейтрализатором выполнена с возможностью регулирования ВТО двигателя до заданного значения вблизи стехиометрии и точной настройки данной регулировки на основании отклонения выходного напряжения датчика 240 НДКОГ от заданного значения напряжения НДКОГ. Контроллер 207 внутреннего контура выполнен с возможностью использования выходного сигнала, расположенного выше по потоку датчика УДКОГ для более широкодиапазонного регулирования по обратной связи, тогда как внешний контур 205 выполнен с возможностью использования выходного сигнала датчика НДКОГ для менее широкодиапазонного регулирования.
Контроллер 207 внутреннего контура, содержащий пропорционально-интегрально-дифференцирующий (ПИД) контроллер, регулирует ВТО двигателя посредством генерации соответствующей топливной команды (например, длительности топливного импульса). Суммирующее соединение 222 опционально объединяет топливную команду от контроллера 207 внутреннего контура с командами от контроллера 220 с прямой связью. Данный объединенный набор команд подают на топливные инжекторы двигателя 227. Датчик 230 УДКОГ подает сигнал обратной связи к контроллеру 207 внутреннего контура. Сигнал обратной связи УДКОГ пропорционален содержанию кислорода в подаваемом газе (например, отработавших газов двигателя) между двигателем 227 и ТКН 235. Контроллер 205 внешнего контура генерирует опорный сигнал УДКОГ, подаваемый к контроллеру 207 внутреннего контура. Опорный сигнал УДКОГ объединяется с сигналом обратной связи УДКОГ в соединении 216. Ошибка или разностный сигнал, обеспечиваемый соединением 216, затем используется контроллером 207 внутреннего контура для регулирования топливной команды таким образом, чтобы действительное ВТО в двигателе 227 достигло требуемого ВТО. Датчик 240 НДКОГ подает сигнал обратной связи к контроллеру 205 внешнего контура. Контроллер 205 внешнего контура может быть любым подходящим контроллером, содержащим интегрирующую составляющую, например пропорционально-интегрирующим (ПИ) контроллером.
Во время нормальной работы каталитический нейтрализатор (например, ТКН 235, представленный на Фиг. 2) вырабатывает кислород (O2) в результате восстановления NOx Одновременно с этим кислород расходуется при окислении других компонентов отработавших газов (например, углеводородов и монооксида углерода). Кислород также непосредственно доступен в отработавших газах из воздуха. Если доступно больше кислорода, чем расходуется, то избыточный кислород накапливается в каталитическом нейтрализаторе (например, в оксиде церия), который может быть использован позже, когда расход кислорода превышает его генерацию. ДСО каталитического нейтрализатора (например, дробная степень окисления оксида церия внутри каталитического нейтрализатора) подразумевает под собой количество накопленного кислорода в каталитическом нейтрализаторе в заданный момент времени по сравнению с общей емкостью накопителя кислорода и может изменяться в диапазоне от 0 (отсутствие накопленного кислорода) до 1 (полная емкость накопителя). ДСО каталитического нейтрализатора могут поддерживать на требуемом уровне (например, 0,5) для оптимальной производительности, причем требуемый уровень калибруют на основании нагрузки и температуры двигателя. Для управления ДСО каталитического нейтрализатора основанные на физических процессах модели двигателя и каталитического нейтрализатора могут храниться в долговременной памяти контроллера, например контроллера 12, представленного на Фиг. 1.
На Фиг. 2В показана структурная схема 250, отображающая пример основанной на физических процессах модели 260 двигателя и пример основанной на физических процессах модели 270 ТКН. Модель 260 двигателя и модель 270 ТКН могут храниться в долговременной памяти контроллера, например контроллера 12, представленного на Фиг. 1.
Модель 260 двигателя получает различные входные параметры. В представленном примере входные параметры для модели двигателя включают в себя ВТО, ТОЖД и ЧВД. Входное значение ВТО для модели двигателя является сигналом, получаемым от датчика УДКОГ, например датчика 126 УДКОГ, представленного на Фиг. 1, который предоставляет регистрируемое ВТО отработавших газов двигателя выше по потоку от ТКН. Входное значение ТОЖД может соответствовать регистрируемому значению ТОЖД (например, от датчика температуры 112, представленного на Фиг. 1), или может, в качестве альтернативы, быть выведено на основании измеренных или выведенных значений других параметров. Входное значение ЧВД может быть генерировано посредством контроллера из сигнала ПЗ, как раскрыто выше со ссылкой на Фиг. 1. Модель 260 двигателя включает в себя различные уравнения, например основанные на физических динамических моделях, которые получают входные параметры в виде входных сигналов и производят выходные параметры, которые представляют собой оценку выходных сигналов двигателя для заданных входных параметров. Модель может быть реализована в контроллере в цифровой форме в режиме реального времени. В одном из примеров модель двигателя может быть разработана с использованием методов идентификации системы, например метода ортогональных наименьших квадратов для создания основанной на регрессии модели выбросов отработавших газов. В представленном примере выходными сигналами модели двигателя является оценка выбросов отработавших газов для заданных входных параметров. Оценка выбросов отработавших газов может представлять собой оценку химического состава отработавших газов, в том числе, например концентрацию различных компонентов отработавших газов.
Оценка выбросов отработавших газов в свою очередь служит одним из входных параметров для модели 270 ТКН. Модель 270 ТКН получает различные другие входные параметры; в представленном примере они включают в себя массу воздуха (MB) и температуру фланца. Параметр MB представляет собой массовый расход воздуха в выпускном канале выше по потоку от ТКН, который может быть измерен датчиком МРВ, размещенном в выпускном канале выше по потоку от ТКН. В качестве альтернативы, MB может быть оценена на основании измеренных или выведенных значений других параметров. Параметр температуры фланца представляет собой температуру на ТКН (например, температуру на фланце, соединяющем выхлопную трубу с ТКН), и может быть измерен посредством датчика температуры, размещенного на фланце, или оценен на основании измеренных или выведенных значений других параметров. Модель 270 ТКН включает в себя различные функции, уравнения и/или управляющие структуры, которые получают входные параметры в виде входных сигналов и выдают выходные параметры, которые представляют собой оценку выходных сигналов двигателя для заданных входных параметров. В представленном примере, выходными сигналами модели ТКН является оценка ВТО в выхлопной трубе (например, ВТО внизу по потоку в выпускном канале, расположенном ниже по потоку от ТКН), оценка выбросов выхлопной трубы (например, оценка химического состава отработавших газов ниже по потоку от ТКН) и оценка ДСО ТКН. Значения данных выходных сигналов могут храниться в долговременной памяти контроллера, и могут служить в качестве основы для регулирования работы системы двигателя, осуществляемого контроллером совместно с различными исполнительными механизмами.
На Фиг. 3 показан пример способа 300 для вычисления оценки ДСО каталитического нейтрализатора с использованием основанных на физических процессах моделей двигателя и ТКН, например показанных на Фиг. 2В. Оценка ДСО может быть использована для диагностики деградации датчика НДКОГ, как раскрыто ниже со ссылкой на Фиг. 5. Инструкции для осуществления способа 300 и остальных способов, содержащихся в данном документе, могут быть выполнены посредством контроллера (например, контроллера 12, представленного на Фиг. 1) на основании инструкций, хранимых в долговременной памяти контроллера, и в сочетании с сигналами, полученными от датчиков системы двигателя, например от датчиков, раскрытых выше со ссылкой на Фиг. 1 и Фиг. 2А. Контроллером могут быть использованы различные исполнительные механизмы системы двигателя для регулирования работы системы двигателя в соответствии со способами, раскрытыми в данном документе.
Способ 300 начинается на шаге 302 и включает в себя проведение оценки или измерение условий работы двигателя. Например, условия работы двигателя могут включать в себя, но не ограничиваясь, ЧВД, нагрузку двигателя, ТОЖД, количество впрыскиваемого топлива, МРВ, ВТО двигателя, напряжение датчика УДКОГ, напряжение датчика НДКОГ, MB отработавших газов и температуру фланца ТКН. Условия работы двигателя могут быть измерены посредством одного или нескольких датчиков, либо оценены или выведены на основании доступных данных. После шага 302 способ переходит на шаг 304.
На шаге 304 контроллер определяет наличие указания неисправности датчика УДКОГ. Неисправность датчика УДКОГ может быть диагностирована с использованием бортовой диагностики, например посредством способа диагностики неисправности по шести образцам; после определения наличия деградации датчика УДКОГ, флаг неисправности датчика УДКОГ может быть установлен на контроллере, причем при определении отсутствия деградации датчика УДКОГ, флаг неисправности датчика УДКОГ не может быть установлен, или может быть снят, если он был установлен ранее.
Если отсутствует указание неисправности датчика УДКОГ, то способ переходит на шаг 306, и контроллер определяет ВТО в выпускном канале выше по потоку от ТКН на основании выходного сигнала датчика УДКОГ. Как раскрыто выше со ссылкой на Фиг. 1, выходной сигнал датчика УДКОГ может быть напряжением, которое прямо пропорционально концентрации кислорода в отработавших газах выше по потоку от ТКН. Соответственно, контроллер может определить ВТО, как функцию от сигнала от датчика УДКОГ пропорционально указанному сигналу. После шага 306 способ переходит на шаг 314.
Возвращаясь к шагу 304, если указана неисправность датчика УДКОГ, то способ 300 переходит на шаг 308, и контроллер оценивает ВТО на основании количества воздуха, поступающего в цилиндры двигателя (МРВ), и количества впрыскиваемого топлива. МРВ может быть оценено посредством датчика, например датчика 120 МРВ, представленного на Фиг. 1). Количество впрыскиваемого топлива может быть определено на основании длительности топливного импульса, заданной контроллером, например.
После шага 308 способ переходит на шаг 310, и контроллер производит фильтрацию и/или усреднение оценок ВТО для повышения точности. Например, в то время как оценки ВТО могут быть относительно не точными из-за смачивания стенки топливом или образования лужи, выполнение фильтрации и/или усреднения может повысить надежность оценки ВТО.
После шага 310 способ переходит на шаг 312, и контроллер производит ввод ВТО (либо ВТО, измеренного посредством датчика УДКОГ на шаге 306, либо ВТО, отфильтрованного и/или усредненного на шаге 310), вместе с оценочными/измеренными значениями ТОЖД и ЧВД, в основанную на физических процессах модель двигателя, например модель 260 двигателя, представленную на Фиг. 2В, для оценки выбросов отработавших газов двигателя. Например, модель двигателя может оценить концентрацию компонентов отработавших газов, движущихся от двигателя через выпускной канал и в каталитический нейтрализатор. После шага 312 способ переходит на шаг 314.
На шаге 314 контроллер производит ввод оценки выбросов отработавших газов двигателя, вместе с оценочными/измеренными значениями MB отработавших газов и температуры фланца каталитического нейтрализатора, в основанную на физических процессах модель каталитического нейтрализатора, например модель 270 ТКН, представленную на Фиг. 2В. Как раскрыто выше со ссылкой на Фиг. 2В, на основании значений данных входных параметров, модель каталитического нейтрализатора оценивает и выдает ДСО каталитического нейтрализатора, наряду с другими выходными сигналами. После шага 314 способ 300 завершается.
Обратимся теперь к Фиг. 4А, на котором график 402 отображает характеристическую кривую отношения между ДСО каталитического нейтрализатора в стационарном состоянии, например ТКН 70, представленного на Фиг. 1, и ВТО отработавших газов. По оси X отложено ВТО λ отработавших газов, измеренное датчиком УДКОГ; причем значение λ равное 1 соответствует работе двигателя при стехиометрии. По оси Y отложено ДСО каталитического нейтрализатора в стационарном состоянии. Обедненная подача (например, отработавший газ, имеющий обедненное ВТО) может привести к насыщению каталитического нейтрализатора, в результате чего ДСО становится ближе к 1. И наоборот, обогащенная подача (например, отработавший газ, имеющий обогащенное ВТО) может привести к истощению каталитического нейтрализатора, в результате чего ДСО становится ближе к 0. Соответственно, ДСО каталитического нейтрализатора в стационарном состоянии является нелинейной функцией от ВТО отработавших газов.
График 404, представленный на Фиг. 4В, отображает характеристическую кривую отношения между напряжением датчика НДКОГ и ВТО отработавших газов. По оси X отложено относительное ВТО λ отработавших газов, измеренное датчиком УДКОГ. По оси Y отложено выходное напряжение датчика НДКОГ. Как было отмечено выше, выходное напряжение датчика НДКОГ является нелинейной функцией от количества кислорода, присутствующего в отработавших газах; обедненная подача (λ>1) приводит к относительно низкому напряжению датчика НДКОГ, в то время, как обогащенная подача (λ<1) приводит к относительно высокому напряжению датчика НДКОГ. Например, при насыщении каталитического нейтрализатора кислородом посредством подачи обедненных отработавших газов, большее количество кислорода будет проходить через каталитический нейтрализатор, поскольку он не может быть накоплен на каталитическом нейтрализаторе, что приводит к относительно низкому напряжению датчика НДКОГ. В отличие от этого, когда каталитический нейтрализатор не насыщен кислородом, из-за подачи обогащенных отработавших газов, кислород накапливается на каталитическом нейтрализаторе, и, таким образом, происходит истощение отработавших газов, что приводит к относительно высокому напряжению датчика НДКОГ. Как показано, скачок напряжения датчика НДКОГ происходит приблизительно при λ=1; когда λ уменьшается приблизительно от 1, выходной сигнал датчика НДКОГ быстро увеличивается (например, наклон графика 404 имеет первое более высокое значение) до достижения порогового значения напряжения, и затем увеличивается менее быстро (например, наклон графика 404 имеет второе более низкое значение) при продолжении уменьшения λ. С другой стороны, при увеличении λ приблизительно от 1, снижение выходного сигнала датчика НДКОГ происходит более медленно (например, наклон графика 404 имеет третье более низкое значение). Таким образом, датчик НДКОГ не обеспечивает линейное измерение ВТО отработавших газов, а указывает обедненное или обогащенное ВТО отработавших газов. Например, контроллер может указывать, что ВТО отработавших газов является обогащенным, если выходное напряжение датчика НДКОГ выше первого порогового значения (например, порогового значения напряжения, при котором наклон сигнала уменьшается от первого более высокого значения до второго более низкого значения), и что ВТО отработавших газов является обедненным, если выходное напряжение датчика НДКОГ ниже второго порогового значения, которое ниже первого порогового значения.
И на Фиг. 4А, и на Фиг. 4В показано, как ДСО каталитического нейтрализатора в стационарном состоянии и выходное напряжение датчика НДКОГ меняются при изменении ВТО отработавших газов. Дополнительно, ДСО каталитического нейтрализатора в стационарном состоянии и выходное напряжение датчика НДКОГ имеют обратную зависимость (например, при увеличении одного, другое уменьшается). Например, при переходе λ от обогащенного к обедненному, ДСО стационарного состояния быстро возрастает, в то время как выходное напряжение датчика НДКОГ быстро снижается.
Обратимся теперь к Фиг. 5, на которой представлен неинтрузивный способ 500 определения неисправности датчика НДКОГ, который может быть выполнен посредством контроллера, например контроллера 12, представленного на Фиг. 1. В данном способе используют обратную зависимость между скоростью изменения ДСО каталитического нейтрализатора и скоростью изменения выходного напряжения датчика НДКОГ, которые характерны для исправного функционирования датчика НДКОГ, для обнаружения того, функционирует ли датчик НДКОГ исправно.
Способ 500 начинается на шаге 502, в котором контроллер оценивает или измеряет условия работы двигателя. (например, ЧВД, нагрузку двигателя и ВТО). Условия работы двигателя могут быть измерены посредством одного или нескольких датчиков, например раскрытых выше, или могут быть оценены, либо выведены, на основании доступных данных.
На шаге 504 контроллер определяет, работает ли двигатель в стационарном состоянии и прогрет ли он. Например, может быть определено, что двигатель работает в стационарном состоянии, если частота вращения двигателя остается, в основном, постоянной в течение по меньшей мере порогового периода времени. Дополнительно, может быть определено, что двигатель прогрет, если температура двигателя выше пороговой температуры (например, она может быть выведена на основании сигнала от датчика ТОЖД, например датчика 112 температуры, представленного на Фиг. 1).
Если двигатель не работает в стационарном состоянии и прогрет, способ переходит на шаг 528, на котором контроллер определяет, прогрет ли двигатель и превышает ли уровень заряда (УЗ) аккумуляторной батареи транспортного пороговое значение. Например, когда двигатель не работает в стационарном состоянии, могут присутствовать переходные условия (например, из-за нажатия оператором транспортного средства педали акселератора, что приводит к резкому увеличению нагрузки двигателя). В гибридном транспортном средстве аккумуляторная батарея и мотор-генератор могут быть функционально соединены с коленчатым валом двигателя и трансмиссией. Например, в условиях, в которых требуемый крутящий момент на колеса транспортного средства выше порогового значения, аккумуляторная батарея может подавать электроэнергию мотору-генератору (действующему в качестве мотора), и мотор может обеспечить дополнительный крутящий момент на колеса транспортного средства через трансмиссию. Однако дополнительный крутящий момент может быть обеспечен только при достаточном УЗ аккумуляторной батареи. В отличие от этого, в условиях, например, замедления, в которых требуемый крутящий момент на колеса транспортного средства ниже порогового значения, выходная мощность двигателя может быть преобразована в электроэнергию посредством мотора-генератора (действующего в качестве генератора), которая затем накапливается в аккумуляторной батарее, так что крутящий момент, подаваемый на колеса транспортного средства, меньше, чем выходной крутящий момент двигателя.
Если на шаге 528 ответ «да», то способ переходит на шаг 530, на котором контроллер регулирует работу системы двигателя таким образом, что двигатель может работать в стационарном состоянии, в то время как требуемый крутящий момент на колеса транспортного средства обеспечивают, как и прежде. Например, если переходное условие является условием ускорения, то нагрузка двигателя может быть снижена до нагрузки стационарного состояния, и требуемое увеличение крутящего момента на колеса транспортного средства может быть обеспечено аккумуляторной батареей и мотором-генератором. В качестве другого примера, если переходное условие является условием замедления, то нагрузка двигателя может быть увеличена до нагрузки стационарного состояния, и выходной крутящий момент двигателя, превышающий требуемый крутящий момент на колеса транспортного средства, может быть использован для генерации электроэнергии на моторе-генераторе для накопления в аккумуляторной батарее (и таким образом не будет приложен к колесам транспортного средства). После шага 530 способ переходит на шаг 508, который будет раскрыт ниже.
В противном случае, если на шаге 528 ответ «нет», то способ переходит на шаг 506, на котором контроллер поддерживает текущую работу двигателя. Например, если последняя выполненная диагностика не указывала неисправность датчика НДКОГ, то поддержание текущей работы двигателя может включать в себя продолжение регулирования ВТО двигателя с учетом сигнала обратной связи от датчика НДКОГ. В качестве альтернативы, если последняя выполненная диагностика указывала неисправность датчика НДКОГ, то поддержание текучей работы двигателя может включать в себя продолжение контроллером регулирования ВТО двигателя без учета сигнала обратной связи от датчика НДКОГ (например, регулирование ВТО двигателя с учетом сигнала обратной связью только от датчика УДКОГ). После шага 506 способ 500 завершается.
Вернемся на шаг 504, если двигатель работает в стационарном состоянии и прогрет, способ 500 переходит на шаг 508. Кроме того, способ переходит на шаг 508 после шага 530. На шаге 508 контроллер вычисляет ДСО каталитического нейтрализатора и определяет выходное напряжение датчика НДКОГ в первый момент времени. Например, ДСО может быть вычислено контроллером с использованием основанных на физических процессах моделей двигателя и ТКН, хранимых в долговременной памяти, таким образом, как раскрыто выше со ссылкой на Фиг. 3. Выходное напряжение датчика НДКОГ измеряют посредством датчика НДКОГ, например датчика 128 НДКОГ, представленного на Фиг. 1, и отправляют в качестве сигнала контроллеру, например контроллеру 12, представленному на Фиг. 1. После шага 508 способ переходит на шаг 510.
На шаге 510 контроллер вычисляет ДСО каталитического нейтрализатора и определяет выходное напряжение датчика НДКОГ во второй, более поздний момент времени (например, второй момент времени возникает хронологически позже первого момента времени). Затем способ переходит на шаг 512.
На шаге 512 контроллер определяет скорость изменения ДСО каталитического нейтрализатора (ΔДСО) и скорость изменения выходного напряжения датчика НДКОГ (ΔНДКОГ) с использованием значений, определенных на шаге 508 и шаге 510. ΔДСО представляет собой разность между значением ДСО каталитического нейтрализатора в первый момент времени и значением ДСО каталитического нейтрализатора во второй, более поздний момент времени, и, таким образом, представляет собой скорость изменения ДСО за период времени, начинающийся в первый момент времени и заканчивающийся во второй момент времени. Аналогично, ΔНДКОГ представляет собой разность между выходным напряжением датчика НДКОГ в первый момент времени и выходным напряжением датчика НДКОГ во второй, более поздний момент времени, и, таким образом, представляет собой скорость изменения выходного напряжения датчика НДКОГ за период времени, начинающийся в первый момент времени и заканчивающийся во второй момент времени. То есть, ΔДСО и ΔНДКОГ определены за общий конкретный период времени, и, таким образом, представляют собой скорости изменения ДСО и выходного сигнала датчика НДКОГ, которые происходят одновременно. Одновременное измерение ΔДСО и ΔНДКОГ в пределах одного и того же периода времени является важным, потому как отношение между скоростями изменения за один и тот же период времени (в частности, является ли каждая из скоростей изменения положительной или отрицательной за один и тот же период времени) является основой для диагностики неисправности. В одном из примеров единицами измерения ΔДСО являются обратные секунды (1/с), так как ДСО может быть представлено целым числом (безразмерный параметр), а скорость измерения ДСО наблюдается с течением времени. Дополнительно, в одном из примеров единицами измерения ΔНДКОГ являются вольты в секунду (В/с). Соответственно, единицами отношения ΔДСО к ΔНДКОГ являются обратные вольты (1/В). После шага 512 способ переходит на шаг 514.
На шаге 514 контроллер определяет, является ли ΔДСО или ΔНДКОГ равным нулю. Если ΔДСО или ΔНДКОГ равно нулю, то способ переходит на шаг 506, на котором контроллер поддерживает текущую работу двигателя, как раскрыто выше. В ином случае, если ΔДСО и ΔНДКОГ оба не равны нулю, то способ переходит на шаг 516.
На шаге 516 контроллер вычисляет отношение ΔДСО к ΔНДКОГ. Поскольку ΔНДКОГ не является нулевым значением, что требуется для перехода с шага 514 на шаг 516, отношение может быть определено. Кроме того, поскольку ΔДСО является ненулевым значением, отношение ΔДСО к ΔНДКОГ будет также иметь ненулевое значение. После шага 516 способ переходит на шаг 518.
На шаге 518 контроллер определяет, является ли знак отношения ΔДСО к ΔНДКОГ положительным и превышает ли пороговое значение. Пороговое значение может быть заранее заданной малым положительным значением, которое указано для снижения шума и уменьшения ложных положительных определений неисправности датчика НДКОГ, которые в противном случае могут возникать во время переходных флуктуаций. В другом примере, однако, пороговое значение может быть равно 0. Если знак отношения ΔДСО к ΔНДКОГ является положительным и превышает пороговое значение, то способ переходит на шаг 520, на котором контроллер указывает неисправность датчика НДКОГ. Указание неисправности датчика НДКОГ может включать в себя установку контроллером (например, установку 1) диагностического флага, соответствующего датчику НДКОГ, причем установка флага указывает состояние неисправности датчика НДКОГ. Указание неисправности датчика НДКОГ может дополнительно включать в себя отправку контроллером сигнала на дисплей транспортного средства для отображения сообщения, требующего от оператора транспортного средства обслуживания выпускной системы или, в ином случае, указывающего оператору транспортного средства, что выпускная система требует обслуживания, например. Затем способ переходит на шаг 522.
На шаге 522 контроллер регулирует ВТО без входного сигнала датчика НДКОГ. Например, контроллер может переходить от выполнения регулирования ВТО по замкнутому контуру на основании сигнала обратной связи от датчика НДКОГ и от датчика УДКОГ, к регулированию ВТО по замкнутому контуру в режиме прямой связи с учетом сигнала обратной связи от датчика УДКОГ, но без учета сигнала обратной связи от датчика НДКОГ, как раскрыто выше со ссылкой Фиг. 2. Например, в соответствии с архитектурой управления, показанной на Фиг. 2, регулирование ВТО без входного сигнала от датчика НДКОГ может включать в себя использование внутреннего контура управления с обратной связью без входного сигнала из внешнего контура управления с обратной связью. В другом примере при наличии указания неисправности датчика УДКОГ в дополнение к неисправности датчика НДКОГ ВТО могут поддерживать в режиме прямой связи с использованием оценки заряда массы воздуха в цилиндре и количества топлива без корректирующих значений от обратной связи датчика УДКОГ и обратной связи датчика НДКОГ. Однако такая работа может негативно повлиять на способность транспортного средства удовлетворять требований по выбросам. После шага 522 способ 500 завершается.
Вернемся на шаг 518, если знак отношения ΔДСО к ΔНДКОГ не положительный (и таким образом имеет отрицательное значение, так как оно не равно нулю), то способ 500 переходит на шаг 524, на котором контроллер указывает, что отсутствует неисправность датчика НДКОГ (например, датчик НДКОГ работает исправно). Указание неисправности датчика НДКОГ может включать в себя снятие контроллером (например, установку 0) диагностического флага, соответствующего датчику НДКОГ, причем снятие флага указывает, что условие неисправности датчика НДКОГ не выявлено. После шага 524 способ переходит на шаг 526.
На шаге 526 контроллер регулирует ВТО с использованием сигнала обратной связи от датчика НДКОГ. Например, ВТО может продолжать регулироваться в соответствии с архитектурой управления каталитическим нейтрализатором, раскрытой со ссылкой Фиг. 2, включающей в себя внутренний и внешний контуры управления с обратной связью, и, таким образом, стратегия регулирования ВТО может быть выполнена без каких-либо корректировок. В дополнение к сигналу обратной связи от датчика НДКОГ, сигнал обратной связи от датчика УДКОГ или оценка ВТО отработавших газов выше по потоку от ТКН могут также быть фактором при регулировании ВТО. Указанная стратегия управления может быть номинальной стратегией управления по умолчанию, которая обеспечивает оптимальное регулирование ВТО, но требует исправного функционирования датчика УДКОГ и датчика НДКОГ. После шага 526 способ 500 завершается.
Таким образом, может быть произведена диагностика датчика НДКОГ на основании только знака отношения ΔДСО к ΔНДКОГ (например, является ли отношение положительным или отрицательным), и, таким образом, независимо от абсолютных значений ΔДСО и ΔНДКОГ. Например, если каталитический нейтрализатор насыщен кислородом в результате обедненной подачи, ДСО каталитического нейтрализатора будет увеличиваться при протекании отработавших газов через каталитический нейтрализатор, так что ΔДСО будет иметь положительное значение. Между тем, выходное напряжение датчика НДКОГ будет снижаться, так что ΔНДКОГ будет иметь отрицательное значение. В противном случае, если кислород, накопленный каталитическим нейтрализатором, истощен в результате обогащенной подачи, то ДСО каталитического нейтрализатора будет уменьшаться при протекании отработавших газов через каталитический нейтрализатор (приводя к отрицательному значению ΔДСО), причем выходное напряжение датчика НДКОГ будет увеличиваться (приводя к положительному значению ΔНДКОГ). Таким образом, во время номинальной работы датчика НДКОГ, отношение ΔДСО к ΔНДКОГ имеет отрицательное значение. Условие неисправности датчика НДКОГ указывают, если отношение ΔДСО к ΔНДКОГ положительно и выше, чем пороговое значение. Только авторы настоящего изобретения выявили, что, хотя абсолютные значения ΔДСО и ΔНДКОГ могут меняться, например, на основании температуры и скорости потока отработавших газов, знак отношения указанных величин сам по себе может надежно указать, находится ли датчик НДКОГ в условии неисправности. Опционально, превышает или нет абсолютное значение отношения ΔДСО к ΔНДКОГ заданное положительное пороговое значение, может быть определено с целью исключения ложных положительных определений, которые могут происходить из-за небольших флуктуаций отношения. Дополнительно, преимущественным образом диагностика датчика НДКОГ может происходить даже во время переходных условий работы, когда способ осуществляют в гибридном транспортном средстве, так как аккумуляторная батарея и мотор-генератор могут прибавлять или удалять крутящий момент при необходимости, чтобы позволить двигателю работать в стационарном состоянии, продолжая подавать требуемый крутящий момент на колеса транспортного средства.
Обратимся теперь к Фиг. 6, на схеме 600 отображен первый пример временной диаграммы, иллюстрирующей диагностику датчика НДКОГ в соответствии со способом 500, представленным на Фиг. 5. На схеме 600 показаны: заданное ВТО (λ) на графике 602, оценка ВТО на графике 604, выходное напряжение датчика УДКОГ на графике 606, состояние флага неисправности датчика УДКОГ на графике 608, выходное напряжение датчика НДКОГ на графике 610, ДСО каталитического нейтрализатора на графике 612, отношение ΔДСО к ΔНДКОГ на графике 614 и состояние флага неисправности датчика НДКОГ на графике 616. Дополнительно, пороговое значение для указания неисправности датчика НДКОГ представлено штриховой линией 618. Для всех вышеуказанных графиков ось X отображает время, причем время увеличивается по оси X слева на право. Ось Y каждого отдельного графика соответствует указанному параметру, который увеличивается снизу наверх, за исключением графиков 608 и 616, в которых ось Y отображает, выставлен ли флаг неисправности датчика «есть» (указание деградации) или «нет» (указание отсутствия деградации).
Между моментами времени t0 и t1 систему двигателя транспортного средства эксплуатируют с заданным ВТО при стехиометрии, так что λ=1, как показано на графике 602. Датчик УДКОГ измеряет действительное ВТО выше по потоку от ТКН и может отображать флуктуации вблизи стехиометрии, так как топливную команду регулируют на основании сигнала обратной связи датчика (график 606), как раскрыто в данном документе со ссылкой на Фиг. 2. Например, если выходной сигнал датчика УДКОГ указывает, что ВТО является обогащенным, то контроллер может уменьшить длительность топливного импульса соответственно для того, чтобы достичь стехиометрического ВТО. В примере, представленном на схеме 600, датчик УДКОГ функционирует исправно (например, он не отображает ни одну из шести шаблонных неисправностей). В результате флаг неисправности датчика УДКОГ (график 608) отсутствует, и оценку ВТО двигателя, показанную на графике 604, определяют с использованием показаний датчика УДКОГ. Между тем, датчик НДКОГ, расположенный ниже по потоку от каталитического нейтрализатора, измеряет ВТО после прохождения каталитического нейтрализатора (например, ВТО в выхлопной трубе). Как показано на графике 610, выходное напряжение датчика НДКОГ имеет незначительные флуктуации при поддержании ВТО на уровне стехиометрии. Аналогично, вычисленная ДСО каталитического нейтрализатора (график 612) испытывает незначительные флуктуации при поддержании ВТО на уровне стехиометрии.
Контроллер, например контроллер 12, представленный на Фиг. 1, определяет отношение ΔДСО к ΔНДКОГ (график 614), как раскрыто в данном документе со ссылкой на Фиг. 5. В примере, показанном на схеме 600, представленной на Фиг. 6, отношение ΔДСО к ΔНДКОГ отслеживают непрерывно. В качестве альтернативы, отношение ΔДСО к ΔНДКОГ могут вычислять периодически. Например, отношение ΔДСО к ΔНДКОГ могут определять после заданного периода времени работы двигателя. В другом примере определение отношения ΔДСО к ΔНДКОГ может быть вызвано изменением условий работы двигателя (например, ЧВД, нагрузки двигателя или ВТО). Между моментами времени t0 и t1 отношение ΔДСО к ΔНДКОГ является отрицательным. Таким образом, в это время флаг неисправности датчика НДКОГ отсутствует, как показано на графике 616.
В момент времени t1 заданное ВТО (график 602) изменяется скачком до обедненного. Например, заданное ВТО может переключиться в обеднение во время замедления транспортного средства или в условиях движения при малой нагрузке. Между моментами времени t1 и t2 выходное напряжение датчика УДКОГ (график 606) увеличивают в ответ на увеличение концентрации кислорода в воздушно-топливной смеси. Флаг 608 неисправности датчика УДКОГ по-прежнему отсутствует, указывая, что неисправность датчика УДКОГ не обнаружена. Дополнительно, между моментами времени t1 и t2 ДСО каталитического нейтрализатора (график 612) увеличивается, так как доступно больше кислорода в подаваемом газе для накопления на каталитическом нейтрализаторе, и каталитический нейтрализатор достигает насыщения (например, значение ДСО достигает 1). Это приводит к большему прохождению кислорода через каталитический нейтрализатор и соответствующему падению выходного напряжения 610 датчика НДКОГ. Отношение ΔДСО к ΔНДКОГ остается отрицательным, как показано на графике 614, ввиду обратного отношения между ДСО каталитического нейтрализатора и выходным напряжением датчика НДКОГ. Поскольку указанное отношение отрицательное, флаг неисправности датчика НДКОГ не устанавливают, и он по-прежнему отсутствует (график 616).
Начиная в момент времени t2, λ (график 602) изменяется скачком от обедненного до обогащенного. Например, ВТО могут изменить скачком до обогащенного во время ускорения транспортного средства или в условиях высокой нагрузки. Так, как количество воздуха (и, следовательно, кислорода) в подаваемом газе снижается, выходное напряжение датчика УДКОГ (график 606) и оценка ВТО (график 604) также уменьшаются. Флаг 608 неисправности датчика УДКОГ по-прежнему отсутствует. ДСО каталитического нейтрализатора (график 612) снижается, так как происходит истощение накопленного кислорода для окисления компонентов отработавших газов, например монооксида углерода и углеводородов; это позволяет увеличить количество кислорода, которое необходимо накопить на каталитическом нейтрализаторе. В результате выходное напряжение 610 расположенного ниже по потоку датчика НДКОГ увеличивается, так как концентрация кислорода в выбросах выхлопной трубы снижается. Снова отношение ΔДСО к ΔНДКОГ остается отрицательным (график 614), и неисправность датчика НДКОГ не указана (график 616).
В момент времени t3 заданное ВТО возвращается к стехиометрии (график 602). Между моментами времени t3 и t4 характер изменения выходного напряжения датчика УДКОГ, выходного напряжения датчика НДКОГ и ДСО каталитического нейтрализатора является подобным характеру изменений между моментами времени t0 и t1. Например, выходное напряжение 606 датчика УДКОГ колеблется вблизи стехиометрии, а выходное напряжение 610 датчика НДКОГ и ДСО 612 каталитического нейтрализатора остаются относительно постоянными с незначительными флуктуациями. Отношение ΔДСО к ΔНДКОГ остается отрицательным (график 614), и неисправность датчика НДКОГ не указана (график 616).
В момент времени t4 λ снова изменяется скачком до обедненного (график 602). Между моментами времени t4 и t5 выходное напряжение 606 датчика УДКОГ, оценка ВТО 604 и ДСО 612 каталитического нейтрализатора увеличиваются в ответ на изменение λ, как раскрыто выше со ссылкой на момент времени t1. Однако, как показано, выходное напряжение 610 датчика НДКОГ также увеличивается. Когда датчик НДКОГ функционирует исправно и, таким образом, не является неисправным, выходное напряжение датчика НДКОГ снижается в ответ на увеличение кислорода в отработавших газах (например, как это было между моментами времени t1 и t2). В отличие от этого, если выходное напряжение датчика НДКОГ увеличивается при увеличении концентрации кислорода в отработавших газах, то датчика НДКОГ деградировал, и он не функционирует исправно. Деградация датчика НДКОГ, которая приводит к такому характеру изменения, может включать в себя увеличение диффузионного барьера из-за накопления сажи на керамическом элементе и истощение катализатора. Как показано на графике 614, из-за одновременного увеличения выходного напряжения датчика НДКОГ и ДСО, наклон сигнала выходного напряжения датчика НДКОГ и наклон сигнала оценки ДСО положительны, и, таким образом, отношение ΔДСО к ΔНДКОГ становится положительным. В момент времени t5 данное отношение превышает пороговое значение 618. В результате в момент времени t5 устанавливают флаг 614 неисправности датчика НДКОГ, указывающего деградацию датчика НДКОГ. Наряду с обеспечением указания неисправности датчика НДКОГ контроллер может отрегулировать логику управления ВТО после обнаружения деградации датчика НДКОГ, например, в порядке, раскрытом в данном документе со ссылкой на Фиг. 5.
В момент времени t6 λ снова изменяется скачком от обедненного до обогащенного (график 602). Выходное напряжение 606 датчика УДКОГ, оценка ВТО 604 и ДСО 612 каталитического нейтрализатора соответственно снижаются, как раскрыто выше со ссылкой на момент времени t2. Однако выходное напряжение 610 датчика НДКОГ также снижается. Снижение выходного напряжения датчика НДКОГ при увеличении обогащения ВТО приводит к положительному значению отношения ΔДСО к ΔНДКОГ (график 614). Следовательно, отношение ΔДСО к ΔНДКОГ остается выше порогового значения 618, и по-прежнему присутствует флаг 616 неисправности датчика НДКОГ.
Обратимся к Фиг. 7, на которой показан второй пример временной диаграммы, иллюстрирующий диагностику датчика НДКОГ в соответствии со способом 500, представленным на Фиг. 5. На схеме 700, представленной на Фиг. 7, отображены те же параметры, что и на схеме 600, представленной на Фиг. 6 (например, график 702, представленный на Фиг. 7, соответствует графику 602, представленному на Фиг. 6), но для второго условия работы, во время которого датчик УДКОГ деградировал.
Как раскрыто выше со ссылкой на Фиг. 6, между моментами времени t0 и t1 систему двигателя транспортного средства эксплуатируют с заданным λ на уровне стехиометрии (график 702). В примере, представленном на Фиг. 7, диагностика датчика УДКОГ (например, посредством способа обнаружения неисправности по шести шаблонам) выполнялась до момента времени t0, и неисправность была обнаружена; как показано, выходное напряжение 706 датчика УДКОГ демонстрирует задержку отклика датчика. Соответственно, устанавливают флаг неисправности датчика УДКОГ (график 708). В отличие от оценки ВТО 604, показанной на Фиг. 6, которое оценивают на основании выходного сигнала датчика УДКОГ, наряду с другими факторами, оценка ВТО, показанная на графике 704, не зависит от выходного сигнала датчика УДКОГ, и вместо этого оценивается на основании измеренных или выведенных условий работы двигателя, например на основании количества воздуха в цилиндре и количества впрыскиваемого топлива, как раскрыто в данном документе со ссылкой на Фиг. 3. ДСО каталитического нейтрализатора может быть определено с использованием оценки ВТО во время условия неисправности датчика УДКОГ, что также раскрыто со ссылкой на Фиг. 3.
До момента времени t4 выходное напряжение 710 датчика НДКОГ и ДСО 712 каталитического нейтрализатора реагируют соответствующим образом на изменение λ, как раскрыто выше со ссылкой Фиг. 6. Например, при увеличении λ ДСО 712 каталитического нейтрализатора увеличивается, а выходное напряжение 710 датчика НДКОГ уменьшается. Таким образом, отношение ΔДСО к ΔНДКОГ является отрицательным (график 714), и неисправность датчика НДКОГ не указана (график 716). Однако начиная с момента времени t4 выходное напряжение датчика НДКОГ увеличивается при увеличении λ, и таким образом отношение ΔДСО к ΔНДКОГ имеет положительное значение. В момент времени t5 отношение ΔДСО к ΔНДКОГ превышает пороговое значение 718. В результате устанавливают флаг 716 неисправности датчика НДКОГ, и оставляют его, пока отношение ΔДСО к ΔНДКОГ остается положительным и превышающим пороговое значение 718.
Наряду с обеспечением указания неисправности датчика НДКОГ контроллер может отрегулировать логику управления ВТО в ответ на обнаружение неисправности датчика НДКОГ. В примере, представленном на Фиг. 7, датчика УДКОГ также деградировал, и, таким образом, ВТО может регулироваться независимо от сигнала обратной связи датчика УДКОГ, ИА также независимо от сигнала обратной связи датчика НДКОГ. Например, в случае неисправности контроллер может осуществлять безопасное управление ВТО с открытым контуром или управление ВТО по прямой связи.
В примерах, показанных посредством схем 600 и 700, неисправность датчика НДКОГ наступает внезапно. Следует понимать, что данные примеры иллюстративны, и в других примерах неисправность датчика НДКОГ может наступать постепенно, или может стать очевидной, как только двигатель достигнет работы в прогретом стационарном состоянии, следующим за событием поворота ключа.
В соответствии с настоящим раскрытием, способ двигателя включает в себя определение скорости изменения дробной степени окисления (ДСО) каталитического нейтрализатора отработавших газов и скорости изменения выходного напряжения датчика кислорода, расположенного ниже по потоку от каталитического нейтрализатора; и если отношение скорости изменения ДСО к скорости изменения выходного напряжения положительно, указание неисправности датчика кислорода и управление работой двигателя независимо от выходного напряжения датчика кислорода. В первом примере способа определение скорости изменения ДСО за период времени включает в себя определение первого ДСО в первый момент времени и второго ДСО во второй момент времени, причем определение первого ДСО и второго ДСО осуществляют посредством основанных на физических процессах моделей двигателя и каталитического нейтрализатора. Второй пример способа, опционально включающий в себя первый пример, дополнительно включает в себя определение первого ДСО и второго ДСО посредством основанных на физических процессах моделей двигателя и каталитического нейтрализатора посредством ввода воздушно-топливного отношения отработавших газов, измеренного выше по потоку от каталитического нейтрализатора, в модель двигателя, осуществления оценки выбросов отработавших газов двигателя с помощью модели двигателя в виде функции от измеренного воздушно-топливного отношения отработавших газов, ввода оценки выбросов отработавших газов двигателя в модель каталитического нейтрализатора и осуществления оценки ДСО с помощью модели каталитического нейтрализатора в виде функции от оценки выбросов отработавших газов двигателя. Третий пример способа, опционально включающий в себя один или несколько примеров с первого по второй, дополнительно включает в себя ввод температуры охлаждающей жидкости двигателя и частоты вращения двигателя в модель двигателя, и ввод массы воздуха отработавших газов и температуры каталитического нейтрализатора в модель каталитического нейтрализатора, причем оценка выбросов отработавших газов двигателя является функцией от температуры охлаждающей жидкости двигателя и частоты вращения двигателя, при этом оценка ДСО является функцией от массы воздуха отработавших газов и температуры каталитического нейтрализатора. Четвертый пример способа, опционально включающий в себя один или несколько примеров с первого по третий, дополнительно включает в себя пример, в котором указанный датчик кислорода является первым датчиком кислорода, причем двигатель дополнительно содержит второй датчик кислорода, расположенный в выпускном канале выше по потоку от каталитического нейтрализатора, при этом управление работой двигателя независимо от указанного выходного сигнала датчика включает в себя регулирование количества топлива, впрыскиваемого в двигатель, в ответ на сигнал обратной связи от второго датчика кислорода. Пятый пример способа, опционально включающий в себя один или несколько примеров с первого по четвертый, дополнительно включает в себя пример, в котором указанный датчик является первым датчиком кислорода, причем двигатель дополнительно содержит второй датчик кислорода, расположенный в выпускном канале выше по потоку от каталитического нейтрализатора, при этом управление работой двигателя независимо от указанного выходного сигнала датчика, включает в себя: определение, находится ли второй датчик кислорода в условии неисправности; если второй датчик находится в условии неисправности, осуществление управления с прямой связью воздушно-топливным отношением двигателя независимо от выходных сигналов первого датчика кислорода и второго датчика кислорода; если второй датчик не находится в условии неисправности, осуществление управления с обратной связью воздушно-топливным отношением двигателя в зависимости от выходного сигнала второго датчика кислорода и независимо от выходного сигнала первого датчика кислорода. Шестой пример способа, опционально включающий в себя один или несколько примеров с первого по пятый, дополнительно включает в себя, если отношение скорости изменения ДСО к скорости изменения выходного напряжения датчика кислорода отрицательно, указание отсутствия неисправности датчика и управление работой двигателя в зависимости от выходного напряжения датчика кислорода. Седьмой пример способа, опционально включающий в себя один или несколько примеров с первого по шестой, дополнительно включает в себя пример, в котором отношение скорости изменения ДСО к скорости изменения выходного напряжения является отношением скорости изменения ДСО между заданным первым моментом времени и заданным вторым моментом времени к скорости изменения выходного момента между указанным заданным первым моментом времени и указанным заданным вторым моментом времени.
Дополнительно, в соответствии с настоящим раскрытием, система двигателя содержит трехкомпонентный каталитический нейтрализатор, расположенный в выпускном канале двигателя; нагреваемый датчик кислорода в отработавших газах (НДКОГ), расположенный ниже по потоку от каталитического нейтрализатора в выпускном канале; контроллер, содержащий долговременную память с хранящимися в ней инструкциями, исполняемыми процессором для: осуществления оценки выбросов отработавших газов двигателя; определения дробной степени окисления (ДСО) каталитического нейтрализатора в виде функции от оценки выбросов отработавших газов двигателя; отслеживания отношения скорости изменения ДСО за заданный период времени к скорости изменения выходного напряжения датчика НДКОГ за указанный заданный период времени; и если отношение положительно и выше порогового значения, указания деградации датчика НДКОГ и регулирования воздушно-топливного отношения двигателя независимо от сигнала обратной связи от датчика НДКОГ. В первом примере системы двигателя, долговременная память содержит основанную на физических процессах модель двигателя и основанную на физических процессах модель каталитического нейтрализатора, хранящиеся в ней. Второй пример системы двигателя, опционально включающий в себя первый пример, дополнительно включает в себя пример, в котором модель двигателя выполнена с возможностью получения в качестве входного сигнала оценки воздушно-топливного отношения отработавших газов и вывода оценки выбросов отработавших газов двигателя, а модель каталитического нейтрализатора выполнена с возможностью получения в качестве входного сигнала оценки выбросов отработавших газов двигателя и вывода ДСО каталитического нейтрализатора. Третий пример системы двигателя, опционально включающий в себя один или несколько примеров с первого по второй, дополнительно содержит универсальный датчик кислорода в отработавших газах (УДКОГ), расположенный выше по потоку от каталитического нейтрализатора в выпускном канале, причем, когда датчик УДКОГ не находится в условии неисправности, осуществляют оценку воздушно-топливного отношения отработавших газов в виде функции от выходного напряжения датчика УДКОГ. Четвертый пример системы двигателя, опционально включающий в себя один или несколько примеров с первого по третий, дополнительно включает в себя пример, в котором, когда датчик УДКОГ находится в условии неисправности, осуществляют оценку воздушно-топливного отношения отработавших газов в виде функции от массового расхода воздуха, поступающего в двигатель, и количества топлива, впрыскиваемого в двигатель, и затем осуществляют фильтрацию и/или усреднение, причем отфильтрованную и/или усредненную оценку воздушно-топливного отношения получают в качестве входного сигнала модели двигателя. Пятый пример системы двигателя, опционально включающий в себя один или несколько примеров с первого по четвертый, дополнительно включает в себя пример, в котором модель двигателя дополнительно выполнена с возможностью получения в качестве входных сигналов частоты вращения двигателя и температуры охлаждающей жидкости двигателя, при этом модель каталитического нейтрализатора дополнительно выполнена с возможностью получения в качестве входных сигналов массового расхода воздуха в выпускном канале и температуры фланца каталитического нейтрализатора. Шестой пример системы двигателя, опционально включающий в себя один или несколько примеров с первого по пятый, дополнительно включает в себя пример, в котором контроллер дополнительно содержит хранящиеся в долговременной памяти инструкции, исполняемые процессором для: если указанное отношение меньше порогового значения, указания отсутствия деградации датчика НДКОГ и регулирования воздушно-топливного отношения двигателя в зависимости от сигнала обратной связи от датчика НДКОГ и дополнительно в зависимости от оценки воздушно-топливного отношения отработавших газов выше по потоку от каталитического нейтрализатора.
Кроме того, в соответствии с представленным раскрытием, гибридное транспортное средство содержит силовой агрегат, содержащий двигатель, мотор-генератор, аккумуляторную батарею и трансмиссию, соединенную с колесами транспортного средства; трехкомпонентный каталитический нейтрализатор, расположенный в выпускном канале двигателя; нагреваемый датчик кислорода в отработавших газах (НДКОГ), расположенный ниже по потоку от каталитического нейтрализатора в выпускном канале; контроллер, содержащий долговременную память с хранящимися в ней инструкциями, исполняемыми процессором для: инициирования диагностики неисправности датчика НДКОГ, причем диагностика неисправности включает в себя осуществление оценки выбросов отработавших газов двигателя, определение дробной степени окисления (ДСО) каталитического нейтрализатора в виде функции от оценки выбросов отработавших газов двигателя, отслеживание отношения скорости изменения ДСО к скорости изменения выходного напряжения датчика НДКОГ, и, если указанное отношение положительно, указание неисправности датчика НДКОГ; и поддержания работы двигателя в стационарном состоянии во время диагностики посредством выборочного добавления или удаления крутящего момента с помощью аккумуляторной батареи и мотора-генератора во время переходных условий. В пятом примере гибридного транспортного средства, диагностика неисправности дополнительно включает в себя, если отношение положительно, регулирование воздушно-топливного отношения двигателя независимо от сигнала обратной связи от датчика НДКОГ, и, если отношение не положительно, указание отсутствия неисправности датчика НДКОГ и регулирование воздушно-топливного отношения двигателя в зависимости от сигнала обратной связи от датчика НДКОГ. Второй пример гибридного транспортного средства, опционально включающий в себя первый пример, дополнительно включает в себя пример, в котором ни абсолютное значение скорости изменения ДСО, ни абсолютное значение скорости изменения выходного напряжения датчика НДКОГ не учитываются при диагностике датчика НДКОГ. Третий пример гибридного транспортного средства, опционально включающий в себя один или несколько примеров с первого по второй, дополнительно включает в себя пример, в котором долговременная память содержит основанную на физических процессах модель двигателя и основанную на физических процессах модель каталитического нейтрализатора, хранящиеся в ней, причем модель двигателя выполнена с возможностью получения в качестве входного сигнала оценки воздушно-топливного отношения отработавших газов и вывода оценки выбросов отработавших газов двигателя, при этом модель каталитического нейтрализатора выполнена с возможностью получения в качестве входного сигнала оценки выбросов отработавших газов двигателя и вывода ДСО каталитического нейтрализатора. Четвертый пример гибридного транспортного средства, опционально включающий в себя один или несколько примеров с первого по третий, дополнительно содержит универсальный датчик кислорода в отработавших газах (УДКОГ), расположенный выше по потоку от каталитического нейтрализатора в выпускном канале, причем, когда датчик УДКОГ не находится в условии неисправности, оценку воздушно-топливного отношения отработавших газов осуществляют в виде функции от выходного напряжения датчика УДКОГ.
Следует отметить, что включенные в настоящую заявку примеры алгоритмов управления и оценки могут использоваться с разнообразными конфигурациями систем двигателей и/или транспортных средств. Раскрытые в настоящей заявке способы и алгоритмы управления могут храниться в виде исполняемых инструкций в долговременной памяти и могут осуществляться системой управления, содержащей контроллер, в сочетании с различными датчиками, исполнительными механизмами и другим аппаратным обеспечением двигателя. Раскрытые в настоящей заявке конкретные алгоритмы могут представлять собой одну или любое количество стратегий обработки, таких как управляемые событиями, управляемые прерываниями, многозадачные, многопотоковые и т.д. Таким образом, проиллюстрированные разнообразные действия, операции и/или функции могут выполняться в указанной последовательности, параллельно, а в некоторых случаях - могут опускаться. Точно так же указанный порядок обработки необязательно требуется для достижения отличительных признаков и преимуществ раскрытых в настоящей заявке вариантов осуществления изобретения, но служит для удобства иллюстрирования и описания. Одно или несколько из иллюстрируемых действий, операций и/или функций могут выполняться повторно в зависимости от конкретной применяемой стратегии. Кроме того, раскрытые действия, операции и/или функции могут графически представлять код, запрограммированный в долговременной памяти машиночитаемого носителя данных в системе управления двигателем, при этом раскрытые действия выполняют путем исполнения инструкций в системе, содержащей разнообразные аппаратные компоненты двигателя в сочетании с электронным контроллером.
Следует понимать, что раскрытые в настоящей заявке конфигурации и алгоритмы по своей сути являются лишь примерами, и что конкретные варианты осуществления не должны рассматриваться в ограничительном смысле, ибо возможны разнообразные их модификации. Например, вышеизложенная технология может быть применена к двигателям со схемами расположения цилиндров V-6, I-4, I-6, V-12, в схеме с 4-мя оппозитными цилиндрами и в двигателях других типов. Объект настоящего изобретения включает в себя все новые и неочевидные комбинации и подкомбинации различных систем и схем, а также других отличительных признаков, функций и/или свойств, раскрытых в настоящем описании.
В нижеследующей формуле изобретения, в частности, указаны определенные комбинации и подкомбинации компонентов, которые считаются новыми и неочевидными. В пунктах формулы ссылка может быть сделана на «один» элемент или «первый» элемент или на эквивалентный термин. Следует понимать, что такие пункты могут включать в себя один или более указанных элементов, не требуя и не исключая наличие двух или более таких элементов. Иные комбинации и подкомбинации раскрытых отличительных признаков, функций, элементов или свойств могут быть включены в формулу путем изменения имеющихся пунктов или путем представления новых пунктов формулы в настоящей или родственной заявке. Такие пункты формулы изобретения, независимо от того, являются они более широкими, более узкими, эквивалентными или отличающимися в отношении объема первоначальной формулы изобретения, также считаются включенными в объект настоящего изобретения.

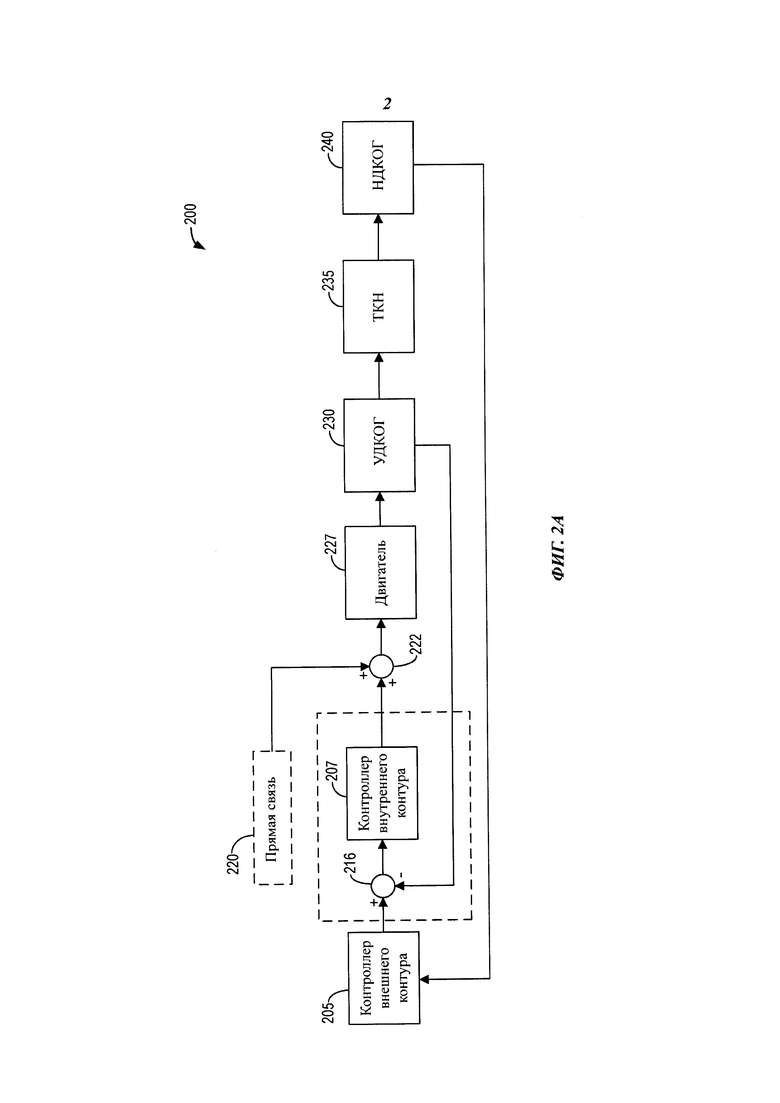






Изобретение относится к диагностике деградации датчика отработавших газов в моторном транспортном средстве. Технический результат заключается в повышении эффективности и скорости диагностики неисправности датчика отработавших газов. Предложены способ и система выявления условия неисправности датчика кислорода в отработавших газах, расположенного ниже по потоку от каталитического нейтрализатора в выпускной системе транспортного средства. Способ включает в себя определение отношения скорости изменения дробной степени окисления каталитического нейтрализатора к скорости изменения выходного напряжения датчика кислорода. Если указанное отношение является положительным, диагностируют неисправность и вследствие этого регулируют работу двигателя без учета сигнала обратной связи от датчика кислорода. 3 н. и 17 з.п. ф-лы, 9 ил.
1. Способ работы двигателя, в котором:
определяют скорость изменения дробной степени окисления (ДСО) каталитического нейтрализатора отработавших газов и скорость изменения выходного напряжения датчика кислорода, расположенного ниже по потоку от каталитического нейтрализатора, посредством контроллера, содержащего долговременную память с сохраненными в ней инструкциями, подлежащими исполнению контроллером;
если отношение скорости изменения дробной степени окисления (ДСО) к скорости изменения выходного напряжения является положительным, указывают неисправность датчика кислорода и управляют работой двигателя независимо от выходного напряжения датчика кислорода посредством указанного контроллера.
2. Способ по п. 1, в котором указанный датчик кислорода является первым датчиком кислорода, причем двигатель дополнительно содержит второй датчик кислорода, расположенный в выпускном канале выше по потоку от каталитического нейтрализатора, при этом управление работой двигателя независимо от указанного выходного сигнала датчика включает в себя регулирование количества топлива, впрыскиваемого в двигатель, в ответ на сигнал обратной связи от второго датчика кислорода.
3. Способ по п. 1, в котором указанный датчик является первым датчиком кислорода, причем двигатель дополнительно содержит второй датчик кислорода, расположенный в выпускном канале выше по потоку от каталитического нейтрализатора, при этом управление работой двигателя независимо от указанного выходного сигнала датчика включает в себя:
определение, находится ли второй датчик кислорода в условии неисправности;
если второй датчик находится в условии неисправности, осуществление управления с прямой связью воздушно-топливным отношением двигателя независимо от выходных сигналов первого датчика кислорода и второго датчика кислорода;
если второй датчик не находится в условии неисправности, осуществление управления с обратной связью воздушно-топливным отношением двигателя в зависимости от выходного сигнала второго датчика кислорода и независимо от выходного сигнала первого датчика кислорода.
4. Способ по п. 1, в котором дополнительно:
если отношение скорости изменения ДСО к скорости изменения выходного напряжения датчика кислорода является отрицательным, указывают отсутствие неисправности датчика и управляют работой двигателя в зависимости от выходного напряжения датчика кислорода.
5. Способ по п. 1, в котором отношение скорости изменения ДСО к скорости изменения выходного напряжения является отношением скорости изменения ДСО между заданным первым моментом времени и заданным вторым моментом времени к скорости изменения выходного момента между указанным заданным первым моментом времени и указанным заданным вторым моментом времени.
6. Способ по п. 1, в котором определение скорости изменения ДСО включает в себя определение первого ДСО в первый момент времени и второго ДСО во второй момент времени, причем определение первого ДСО и второго ДСО осуществляют посредством основанных на физических процессах моделей двигателя и каталитического нейтрализатора, сохраненных в долговременной памяти.
7. Способ по п. 6, в котором определение первого ДСО и второго ДСО посредством основанных на физических процессах моделей двигателя и каталитического нейтрализатора включает в себя ввод воздушно-топливного отношения отработавших газов, измеренного выше по потоку от каталитического нейтрализатора, в модель двигателя, осуществление оценки выбросов отработавших газов двигателя с помощью модели двигателя в виде функции от измеренного воздушно-топливного отношения отработавших газов, ввод оценки выбросов отработавших газов двигателя в модель каталитического нейтрализатора и осуществление оценки ДСО с помощью модели каталитического нейтрализатора в виде функции от оценки выбросов отработавших газов двигателя.
8. Способ по п. 7, в котором дополнительно в модель двигателя вводят температуру охлаждающей жидкости двигателя и частоту вращения двигателя, а в модель каталитического нейтрализатора вводят массу воздуха отработавших газов и температуру каталитического нейтрализатора, причем оценка выбросов отработавших газов двигателя является функцией от температуры охлаждающей жидкости двигателя и частоты вращения двигателя, при этом оценка ДСО является функцией от массы воздуха отработавших газов и температуры каталитического нейтрализатора.
9. Система двигателя, содержащая:
трехкомпонентный каталитический нейтрализатор, расположенный в выпускном канале двигателя;
нагреваемый датчик кислорода в отработавших газах (НДКОГ), расположенный ниже по потоку от каталитического нейтрализатора в выпускном канале;
контроллер, содержащий долговременную память с хранящимися в ней инструкциями, исполняемыми процессором для:
осуществления оценки выбросов отработавших газов двигателя;
определения дробной степени окисления (ДСО) каталитического нейтрализатора в виде функции от оценки выбросов отработавших газов двигателя;
отслеживания отношения скорости изменения дробной степени окисления (ДСО) за заданный период времени к скорости изменения выходного напряжения датчика НДКОГ за указанный заданный период времени;
если отношение положительно и выше порогового значения, указания деградации датчика НДКОГ и регулирования воздушно-топливного отношения двигателя независимо от сигнала обратной связи от датчика НДКОГ.
10. Система двигателя по п. 9, в которой контроллер дополнительно содержит хранящиеся в долговременной памяти инструкции, исполняемые процессором для:
если указанное отношение меньше порогового значения, указания отсутствия деградации датчика НДКОГ и регулирования воздушно-топливного отношения двигателя в зависимости от сигнала обратной связи от датчика НДКОГ и дополнительно в зависимости от оценки воздушно-топливного отношения отработавших газов выше по потоку от каталитического нейтрализатора.
11. Система двигателя по п. 9, в которой долговременная память содержит основанную на физических процессах модель двигателя и основанную на физических процессах модель каталитического нейтрализатора, хранящиеся в ней.
12. Система двигателя по п. 11, в которой модель двигателя выполнена с возможностью получения в качестве входного сигнала оценки воздушно-топливного отношения отработавших газов и вывода оценки выбросов отработавших газов двигателя, а модель каталитического нейтрализатора выполнена с возможностью получения в качестве входного сигнала оценки выбросов отработавших газов двигателя и вывода ДСО каталитического нейтрализатора.
13. Система двигателя по п. 12, в которой модель двигателя дополнительно выполнена с возможностью получения в качестве входных сигналов частоты вращения двигателя и температуры охлаждающей жидкости двигателя, при этом модель каталитического нейтрализатора дополнительно выполнена с возможностью получения в качестве входных сигналов массового расхода воздуха в выпускном канале и температуры фланца каталитического нейтрализатора.
14. Система двигателя по п. 11, дополнительно содержащая универсальный датчик кислорода в отработавших газах (УДКОГ), расположенный выше по потоку от каталитического нейтрализатора в выпускном канале, причем, когда датчик УДКОГ не находится в условии неисправности, осуществляют оценку воздушно-топливного отношения отработавших газов в виде функции от выходного напряжения датчика УДКОГ.
15. Система двигателя по п. 14, в которой, когда датчик УДКОГ находится в условии неисправности, осуществляют оценку воздушно-топливного отношения отработавших газов в виде функции от массового расхода воздуха, поступающего в двигатель, и количества топлива, впрыскиваемого в двигатель, и затем осуществляют фильтрацию и/или усреднение, причем отфильтрованную и/или усредненную оценку воздушно-топливного отношения получают в качестве входного сигнала модели двигателя.
16. Гибридное транспортное средство, содержащее:
силовой агрегат, содержащий двигатель, мотор-генератор, аккумуляторную батарею и трансмиссию, соединенную с колесами транспортного средства;
трехкомпонентный каталитический нейтрализатор, расположенный в выпускном канале двигателя;
нагреваемый датчик кислорода в отработавших газах (НДКОГ), расположенный ниже по потоку от каталитического нейтрализатора в выпускном канале;
контроллер, содержащий долговременную память с хранящимися в ней инструкциями, исполняемыми процессором для:
инициирования диагностики неисправности датчика НДКОГ, причем диагностика неисправности включает в себя осуществление оценки выбросов отработавших газов двигателя, определение дробной степени окисления (ДСО) каталитического нейтрализатора в виде функции от оценки выбросов отработавших газов двигателя, отслеживание отношения скорости изменения дробной степени окисления (ДСО) к скорости изменения выходного напряжения датчика НДКОГ и, если указанное отношение положительно, указание неисправности датчика НДКОГ; и
поддержания работы двигателя в стационарном состоянии во время диагностики посредством выборочного добавления или удаления крутящего момента с помощью аккумуляторной батареи и мотора-генератора во время переходных условий.
17. Гибридное транспортное средство по п. 16, в котором диагностика неисправности дополнительно включает в себя, если отношение положительно, регулирование воздушно-топливного отношения двигателя независимо от сигнала обратной связи от датчика НДКОГ и, если отношение не положительно, указание отсутствия неисправности датчика НДКОГ и регулирование воздушно-топливного отношения двигателя в зависимости от сигнала обратной связи отдатчика НДКОГ.
18. Гибридное транспортное средство по п. 16, в котором ни абсолютное значение скорости изменения ДСО, ни абсолютное значение скорости изменения выходного напряжения датчика НДКОГ не учитываются при диагностике датчика НДКОГ.
19. Гибридное транспортное средство по п. 16, в котором долговременная память содержит основанную на физических процессах модель двигателя и основанную на физических процессах модель каталитического нейтрализатора, хранящиеся в ней, причем модель двигателя выполнена с возможностью получения в качестве входного сигнала оценки воздушно-топливного отношения отработавших газов и вывода оценки выбросов отработавших газов двигателя, при этом модель каталитического нейтрализатора выполнена с возможностью получения в качестве входного сигнала оценки выбросов отработавших газов двигателя и вывода ДСО каталитического нейтрализатора.
20. Гибридное транспортное средство по п. 19, дополнительно содержащее универсальный датчик кислорода в отработавших газах (УДКОГ), расположенный выше по потоку от каталитического нейтрализатора в выпускном канале, причем, когда датчик УДКОГ не находится в условии неисправности, оценку воздушно-топливного отношения отработавших газов осуществляют в виде функции от выходного напряжения датчика УДКОГ.
| US 2013180509 A1, 2013-07-18 | |||
| US 2015204258 A1, 2015-07-23 | |||
| US 2013231847 A1, 2013-09-05 | |||
| US 2009182490 A1, 2009-07-16 | |||
| RU 2015104992 A, 2016-08-27 | |||
| RU 2013140257 A, 2015-03-10 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИНТЕЛЛЕКТУАЛЬНОЙ ДИАГНОСТИКИ СБОЕВ АВТОМОБИЛЬНЫХ ДАТЧИКОВ | 2004 |
|
RU2292578C2 |

