ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к калибровке дозатора распределяющей продукт машины, такой как сельскохозяйственная пневматическая сеялка.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 представляет собой вид сбоку сельскохозяйственной пневматической сеялки;
Фиг.2 представляет собой вид в разрезе дозатора и распределительного коллектора пневматической сеялки, показанной на фиг.1;
Фиг.3 представляет собой вид в вертикальном разрезе дополнительной распределительной башни пневматической сеялки, показанной на фиг.1; и
Фиг.4 представляет собой вид сбоку трактора для буксировки пневматической сеялки, показанной на фиг.1.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Ниже представлены и описаны устройство распределения продукта и способ распределения продукта. Одним применением подобного устройства и способа является применение в сельскохозяйственной пневматической сеялке.
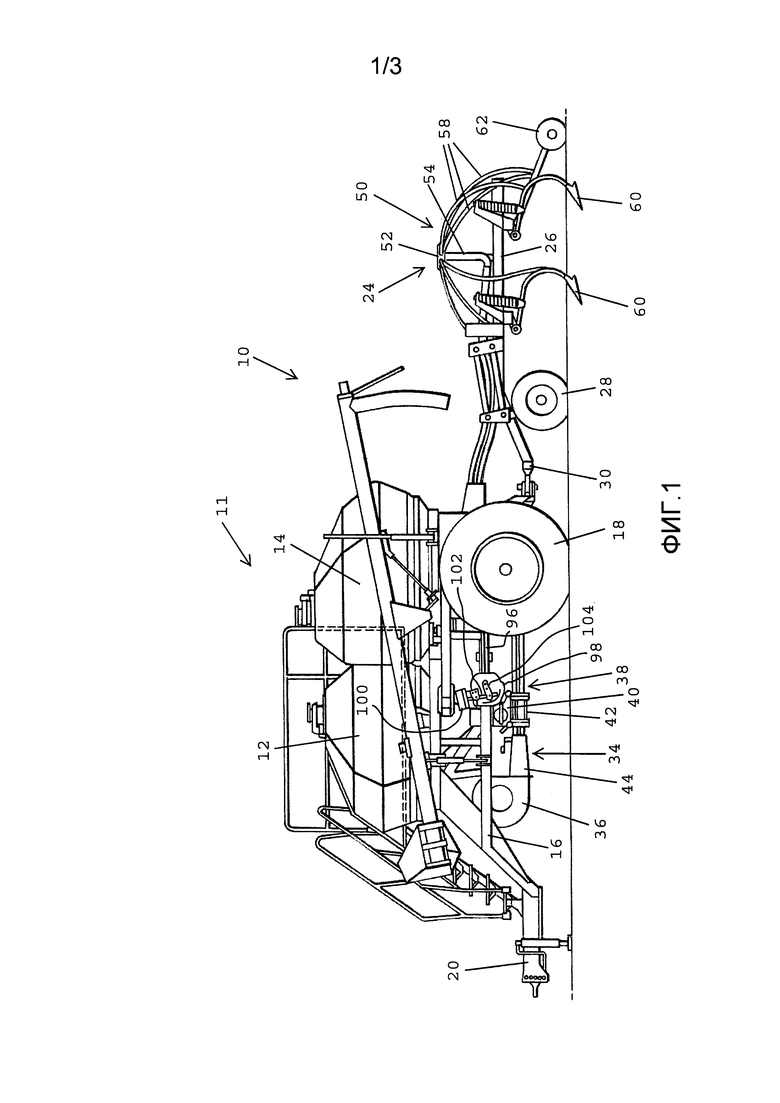
Со ссылкой на фиг.1 показано сельскохозяйственное орудие 10 для посева и внесения удобрений, обычно упоминаемое как пневматическая сеялка. Орудие 10 содержит пневматическую тележку 11, имеющую контейнеры или резервуары 12 и 14 для удержания продуктов, подлежащих распределению в почву. Резервуары 12 и 14 установлены на раме 16, поддерживаемой ходовыми колесами 18 для передвижения вперед по земле буксирующим транспортным средством, таким как сельскохозяйственный трактор 22, показанный на фиг.4, соединенным с передним дышлом 20. На пневматической тележке может быть предусмотрено любое количество резервуаров. Инструмент 24 для земляных работ содержит раму 26, поддерживаемую ходовыми колесами 28 и соединенную с задней частью рамы 16 пневматической тележки посредством дышла 30. Альтернативные конфигурации могут помещать орудие для земляных работ впереди пневматической тележки 11, или пневматическая тележка и инструмент для земляных работ могут объединяться на общей раме. Резервуарами 12 и 14 может быть любое подходящее устройство для удержания материала, подлежащего распределению. Это могут быть бункеры, баки, ящики, контейнеры и т.д. Термин «резервуар» в данном документе следует толковать широко. Кроме того, также может быть предоставлен один резервуар с множеством отделений. Продукт, содержащийся в продуктовых резервуарах 12 и 14, может включать в себя семена, удобрения или другие гранулированные продукты.
Пневматическая распределительная система 34 содержит вентилятор 36, соединенный с системой трубопроводов для доставки продукта, имеющей множество трубопроводов 38 для распределения продукта. Вентилятор 36 направляет воздух через трубопроводы 38. Дозатор 40 продукта, расположенный на дне каждого резервуара 12 и 14, только один из которых показан на фиг.1, доставляет продукты из резервуаров 12 и 14 через полости в корпусе дозатора и в распределительном коллекторе 42 в трубопроводы 38 для доставки продуктов. Конкретный тип дозатора не важен для устройства, однако, в большинстве примеров, дозатор будет представлять собой объемный дозатор. Примером подобной распределительной системы 34 является John Deere 1910 Commodity Air Cart, которая подробно показана в Патенте США № 6213698, включенном в данное описание посредством ссылки.
Каждый трубопровод 38 переносит продукт в воздушной струе в направлении назад в дополнительную распределительную башню 50. Как правило, для каждого трубопровода 38 должна быть одна башня 50. Каждая башня 50 содержит дополнительный распределительный коллектор 52, расположенный на самом верхнем конце вертикальной трубы 54. Распределительный коллектор 52 разделяет поток продукта во множество дополнительных распределительных трубопроводов 58. Каждый дополнительный распределительный трубопровод 58 доставляет продукт в один из множества сошников 60, прикрепленных к раме 26 в местах, разделенных промежутком в поперечном направлении, для размещения продукта в земле. За сошником следует утрамбовывающее или заделывающее колесо 62, связанное с каждым сошником 60, которое утрамбовывает почву поверх продукта, размещенного в почве. Орудие 10 может быть оборудовано отдельными трубопроводами 38 для каждого из резервуаров 12 и 14, за счет чего различные продукты могут распределяться по отдельности. В качестве альтернативы, продукты из резервуаров 12 и 14 могут объединяться в одних и тех же трубопроводах 38 для распределения вместе. В других вариантах осуществления распределительной системы, трубопроводы 38 могут быть выполнены с возможностью избирательно объединять продукты из резервуаров 12 и 14 в общие трубопроводы или содержать продукты отдельно в различных трубопроводах 38.
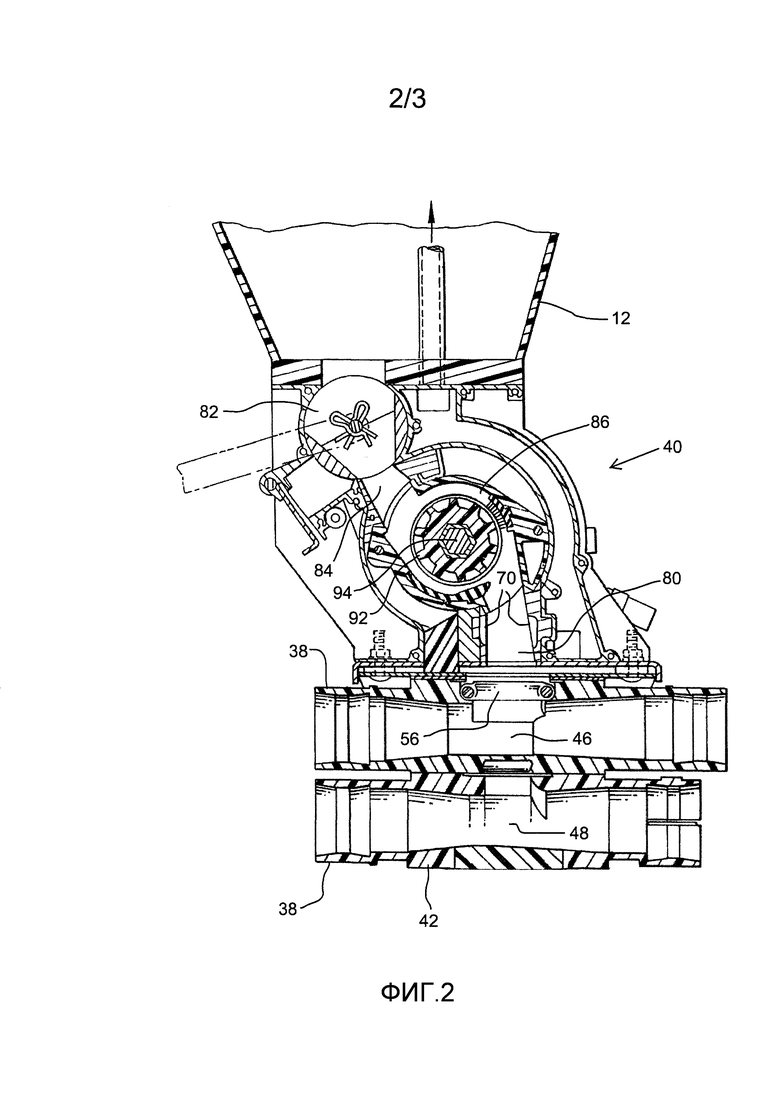
Регулируемая заслонка 44 в пневматической распределительной системе 34 направляет воздушную струю в верхний ряд трубопроводов 38 и в нижний ряд трубопроводов 38. Как правило, оба ряда трубопроводов будут содержать множество трубопроводов для приема дозированного продукта. Верхний ряд трубопроводов 38 направляет часть воздушной струи для верхнего ряда в верхний ряд трубок 46 Вентури в основном пневматическом распределительном коллекторе 42, связанном с обоими продуктовыми резервуарами. Аналогичным образом, нижний ряд труб 38 направляет воздушную струю в нижний ряд трубок 48 Вентури в основном распределительном коллекторе 42.
Продукт из резервуаров 12 и 14 дозируется соответствующими дозаторами 40. Продукт попадает в воздушную струю через трубки 46 или 48 Вентури. Основной пневматический распределительный коллектор 42 снабжен распределительным клапаном 56, расположенным между дозатором 40 продукта и трубками 46 и 48 Вентури для избирательного направления дозированного продукта либо в верхний ряд трубок 46 Вентури, либо в нижний ряд трубок 48 Вентури. Например, продукт в резервуаре 12 может направляться в воздушную струю верхнего ряда, а продукт в резервуаре 14 может направляться в воздушную струю нижнего ряда, что определяется положением распределительного клапана 56. В качестве альтернативы, продукт из обоих резервуаров 12 и 14 может направляться в верхний ряд трубопроводов 38 и распределяться вместе, или для распределения вместе оба направляются в нижний ряд трубопроводов 38.
Продукт из резервуара 12 направляется мимо отсекающего клапана 82 через впускной проход 84 в дозирующую камеру 86, имеющую рифленый дозирующий барабан 92, который приводится во вращение шестигранным валом 94. Дозированный продукт направляется через выпускной проход 80 в одну из трубок 46 или 48 Вентури в зависимости от положения распределительного клапана 56. Выпускные проходы 80, трубки 46 и 48 Вентури, трубопроводы 38, башня 54 и дополнительные распределительные трубопроводы 58 вместе составляют проходы для прохождения продукта, через которые продукт проходит после дозатора 40.
Оптические датчики 70 массового потока могут быть расположены в выпускном проходе 80 для определения прохождения продукта через данные проходы. Оптические датчики 70 также могут быть расположены в трубопроводах 38 или во вторых распределительных трубопроводах 58 или где-либо еще в проходах для прохождения продукта после дозатора. Оптические датчики 70 могут относиться к типу, раскрытому в заявке на патент США 2010-0264163 A1, включенной в данное описание путем ссылки. Упомянутый датчик делит площадь поперечного сечения прохода для прохождения продукта на множество отделенных колонн для определения потока продукта в каждой колонне.
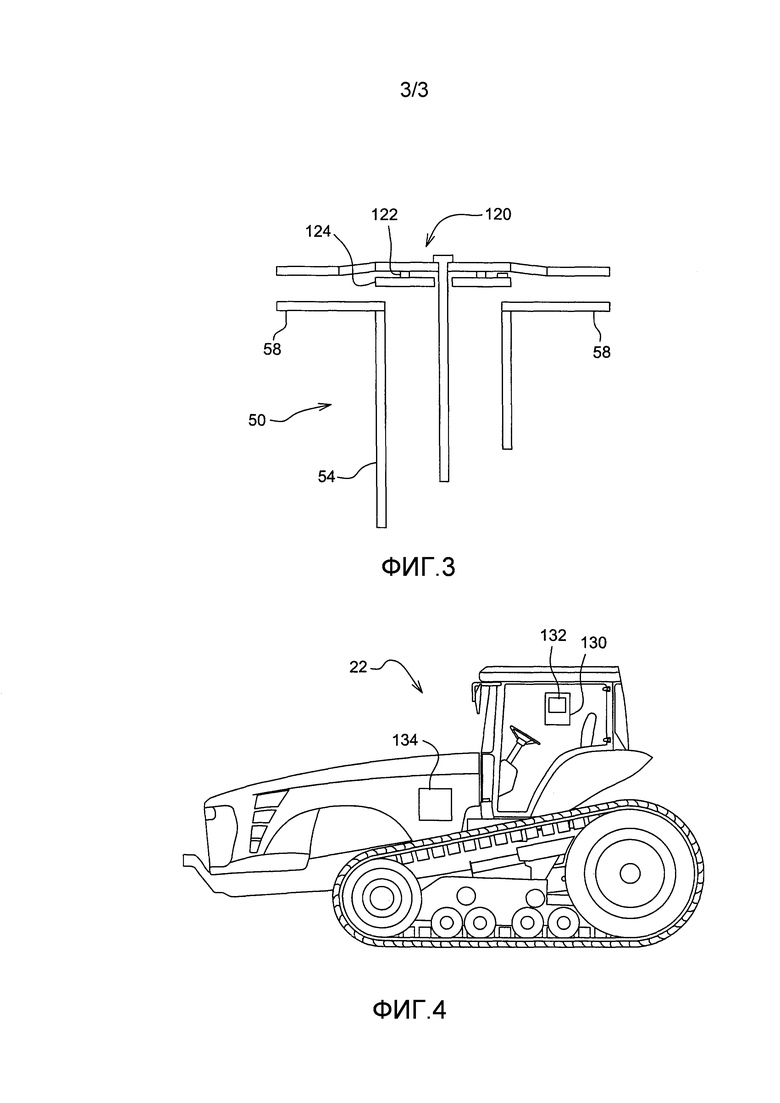
В дополнительных распределительных коллекторах 52 может быть установлен ударный датчик 120 массового потока, фиг.3. Ударный датчик 120 содержит динамометрический элемент 122 типа шайбы, соединенный с более большой шайбообразной ударной пластиной 124 сверху вертикальной трубы 54. Диаметр ударной пластины 124 приблизительно равен диаметру трубы 54, так что по существу весь продукт, доставляемый через трубу 54, ударяет пластину 124 перед выходом через дополнительные распределительные трубопроводы 58. Хотя ударная пластина 124 показана плоской, также могут использоваться другие формы поверхности, которые могут помочь более равномерному распределению продукта по трубопроводам 58. Ударные датчики массового потока могут быть расположены где-либо еще в воздушной струе, перед или после дополнительного распределительного коллектора. Например, см. патент США 5831542, включенный в данное описание путем ссылки, где ударный датчик массового потока показан в дополнительных трубопроводах.
Дозатор 40 продукта приводится в действие посредством механической системы ходового привода от левого заднего колеса 18. Приводной вал 96 приводится в действие колесом посредством широко известного цепного привода (не показан). Вал 96 представляет собой вход привода в бесступенчатую трансмиссию 98. Трансмиссия имеет поперечный выходной вал, который продолжается к противоположной стороне дозатора 40 и соединен с ним с помощью цепи. Данный привод используется на 1910 Commodity Air Cart, продаваемой John Deere. Выходная скорость трансмиссии 98 изменяется электрическим двигателем 100. Двигатель 100 поворачивает винт 102, который перемещает регулировочный рычаг 104 трансмиссии. Ходовой привод приводит к тому, что скорость дозатора пропорциональна скорости движения машины. Трансмиссия 98 обеспечивает возможность регулирования скорости дозатора для создания необходимой скорости потока продукта на единицу площади захватываемой земли. Механическая система ходового привода относительно простая и надежная. Однако, для приведения в действие дозаторов также могут использоваться приводы от электрического двигателя или приводы от гидравлического двигателя, которые обеспечивают для дозатора необходимое регулирование скорости, чтобы варьировать скорость доставки продукта.
Трактор 22, показанный на фиг.4, имеет блок 130 управления сеялкой, установленный в кабине трактора. Блок управления содержит дисплей 132 для предоставления информации оператору. Также, дисплеем 132 может быть сенсорный экран, обеспечивающий оператору возможность ввода данных в блок управления для работы машины 10. Для ввода данных также могут использоваться кнопки и клавиши, также как переносные запоминающие устройства.
В процессе работы пневматической сеялки, в настоящее время практикуется ручная калибровка дозаторов. Калибровку дозаторов проводят для определения надлежащей скорости для вращения дозатора с целью доставки необходимого количества продукта на единицу площади. Калибровку обычно проводят в то время, как машина является неподвижной, посредством поворота дозатора на заданное число оборотов, улавливая в то же время продукт, выпускаемый из дозатора. Затем захваченный продукт взвешивают и определяют массу продукта за оборот дозатора. Из этого, определяют правильную настройку трансмиссии 98 с плавным изменением скорости. Подобный процесс отнимает много времени и является непродуктивным периодом машины. В результате, калибровку выполняют не так часто, как требуется для обеспечения правильных скоростей дозирования. Вместо калибровки дозатора стационарным способом, для измерения скорости потока продукта в реальном времени могут использоваться датчики 70 и/или 120 массового потока. Однако, датчики имеют ограничения и могут быть не в состоянии точно измерять скорости потока продукта во всех условиях, то есть, для всех типов материалов и при всех скоростях доставки. Например, оптический датчик 70 массового потока является более точным при низких скоростях потока, чем при высоких скоростях потока. Датчик 70 имеет более высокую точность, когда размер и форма частиц являются более равномерными. С другой стороны, ударный датчик 120 в общем является более точным для более высоких скоростей массового потока.
Представлен способ калибровки, в котором скорость дозатора изменяется от настройки номинальной скорости для изменения скорости потока продукта до скорости, при которой повышается точность датчика массового потока. Например, при использовании оптического датчика 70 массового потока, дозатор можно замедлить, чтобы уменьшить скорость потока и посредством этого увеличить точность датчика. Вычисляют массовый поток за оборот и определяют необходимое отношение скоростей между дозатором и ходовым колесом 18. Затем двигатель 110 используют для регулирования по необходимости трансмиссии. С механическим приводом дозатора желательно, а возможно необходимо, при изменении скорости дозатора изменять скорость движения машины 10. С дозатором с приводом от электрического или гидравлического двигателя, скорость дозатора может изменяться независимо от скорости движения машины, но тем не менее может быть желательно изменять скорость движения машины таким образом, чтобы скорость распределения материала по массе на площадь оставалась постоянной, хотя бы даже скорость дозатора изменяется.
Для изменения скорости движения машины, блок управления может показывать на дисплее, необходимую скорость машины. Затем оператор вручную изменяет скорость движения трактора 22 до необходимой скорости машины. В качестве альтернативы, блок управления 130 может быть соединен с контроллером 134 скорости трактора, чтобы для изменения скорости трактора посылать сигнал команды изменения скорости непосредственно в контроллер 134.
Наиболее вероятно, что при использовании оптического датчика 70 при калибровке дозатора, будет необходимо уменьшать скорости движения машины и дозатора. С ударным датчиком массового потока вероятно, что скорость дозатора и скорость движения машины будет увеличиваться для повышения точности датчика. Несмотря на то, что это является общим правилом, могут быть периоды времени, когда, в зависимости от дозируемого материала и необходимой скорости, верно противоположное.
Данная машина может иметь только один из оптического или ударного датчиков, или она может быть оборудована обоими типами датчиков. Наличие обоих типов датчиков является дополняющим и обеспечивает возможность гибкости при калибровке. Например, дозатор для резервуара с семенами можно лучше всего калибровать с использованием оптического датчика, в то время, как другой резервуар может иметь удобрение и дозатор, используемый с высокой скоростью, так что дозатор лучше всего калибровать с использованием ударного датчика массового потока. В таком случае, каждый дозатор 40 будет калиброваться отдельно. Для калибровки дозатора на резервуаре с семенами скорость движения машины и скорость дозатора будет уменьшаться, тогда как для калибровки дозатора на резервуаре с удобрением скорость движения машины и скорость дозатора может увеличиваться.
Наличие в каждом проходе для прохождения продукта множества типов датчиков, также может использоваться для повышенной точности измерения скоростей потока продукта даже без изменения скорости дозатора. В одном сценарии, один резервуар наполнен семенами, а другой резервуар наполнен удобрением. Каждый продукт распределяется в отдельные трубопроводы 38, например, семена в верхний ряд трубопроводов 38, а удобрение в нижний ряд трубопроводов, методом известным, как «двухконтурное» распределение. Измерения в реальном времени потока продукта могут быть проделаны с массовой скоростью потока семян, измеренной с помощью оптического датчика, и массовой скоростью потока удобрений, измеренной с помощью ударного датчика.
При «одноконтурном» распределении, используется только один ряд трубопроводов 38, (или машина оборудована только одним рядом трубопроводов 38), при этом семена и удобрения объединяются. Оптический датчик может быть наиболее точным для массовой скорости потока семян. Ударный датчик используется для измерения массовой скорости объединенного потока. Затем посредством вычитания массовой скорости потока семян из общей массовой скорости потока определяется массовая скорость потока удобрений.
При одноконтурном распределении, использование множества датчиков обеспечивает возможность продолжения работы, когда один датчик выходит из строя. Например, если массовая скорость потока из каждого резервуара измеряется посредством оптических датчиков, и датчики для одного резервуара выходят из строя, скорость потока все-таки может определяться посредством использования общей скорости потока, которая измеряется ударным датчиком, и вычитания массового потока, который измеряется функционирующим датчиком.
Наличие двух датчиков в проходе для прохождения продукта все-таки предоставляет машине возможность работать и измерять скорости потока, если один датчик выходит из строя. Например, если ударный датчик выходит из строя, для измерения массовой скорости потока может использоваться оптический датчик. Несмотря на то, что при заданной массовой скорости потока он может быть не таким же точным, как ударный датчик, он будет все-таки предоставлять в блок управления полезную информацию о массовой скорости потока. Использование двух датчиков различных типов, как описано, обеспечивает возможность использования наиболее точного из двух датчиков. Однако, если в проходе для прохождения заданного продукта используются два датчика одного и того же типа, обеспечивается дублирование.
После описания предпочтительного варианта осуществления, становится очевидно, что могут быть выполнены различные изменения, не выходящие за рамки объема правовых притязаний изобретения, который определен в сопровождающей формуле изобретения.
Изобретение относится к области сельского хозяйства. Способ калибровки дозатора распределяющей продукт машины включает следующие этапы: работа машины посредством передвижения машины по земле со скоростью движения машины, при этом приводят в действие дозатор с изменяющейся скоростью на первой номинальной скорости дозатора; изменение номинальной первой скорости привода дозатора для изменения скорости потока продукта на вторую скорость дозатора, при которой повышается точность по меньшей мере одного датчика массового потока из множества датчиков массового потока; во время приведения дозатора с изменяющейся скоростью в действие на второй скорости измерение скорости потока продукта через множество проходов для прохождения продукта; вычисление массовой скорости потока за оборот дозатора с изменяющейся скоростью; работа дозатора с изменяющейся скоростью на третьей скорости дозатора, определяемой из вычисленной массовой скорости потока за оборот дозатора с изменяющейся скоростью и скорости движения машины, для получения необходимой скорости потока на площадь, охватываемую распределяющей продукт машиной. Для осуществления способа используют устройство, имеющее резервуар, выполненный с возможностью удержания распределяемого продукта, узел дозатора для регулирования выпуска продукта, удерживаемого резервуаром, множество проходов для прохождения продукта. Проходы выполнены с возможностью приема и направления продукта после дозатора, имеющего привод с изменяющейся скоростью по сигналу с контроллера. Кроме того, устройство имеет множество датчиков массового потока, выполненных с возможностью измерения скорости потока продукта через множество проходов для прохождения продукта. При этом каждый датчик из множества датчиков массового потока выполнен с возможностью генерирования выходного сигнала, указывающего скорость потока продукта. Контроллер выполнен с возможностью регулирования скорости привода дозатора с изменяющейся скоростью и изменения скорости привода дозатора во время процесса калибровки дозатора от настройки номинальной первой скорости для изменения скорости потока продукта до второй скорости, при которой повышается точность по меньшей мере одного датчика массового потока из множества датчиков массового потока. Во втором варианте исполнения устройство имеет дополнительно блок управления, соединенный с контроллером и принимающий сигналы от датчиков. Изобретение позволит повысить точность распределения продукта. 3 н. и 8 з.п. ф-лы, 4 ил.
1. Распределяющая продукт машина для передвижения по земле, содержащая:
резервуар, выполненный с возможностью удержания распределяемого продукта;
дозатор для регулирования выпуска продукта из резервуара;
множество проходов для прохождения продукта, через которые продукт проходит после дозатора;
множество датчиков массового потока, выполненных с возможностью измерения скорости потока продукта через проходы для прохождения продукта, при этом каждый датчик генерирует выходной сигнал, указывающий скорость потока продукта мимо датчика;
привод дозатора с изменяющейся скоростью;
контроллер, выполненный с возможностью регулирования скорости привода дозатора с изменяющейся скоростью и изменения скорости привода дозатора во время процесса калибровки дозатора от настройки номинальной первой скорости для изменения скорости потока продукта до второй скорости, при которой повышается точность по меньшей мере одного датчика массового потока из множества датчиков массового потока.
2. Распределяющая продукт машина по п. 1, в которой контроллер выполнен с возможностью подачи сигнала изменения скорости движения распределяющей продукт машины для приведения в соответствие с изменением скорости дозатора во время процесса калибровки.
3. Распределяющая продукт машина по п. 2, в которой сигналом для изменения скорости движения машины является визуальный сигнал для ручного изменения скорости движения распределяющей продукт машины.
4. Распределяющая продукт машина по п. 2, в которой сигналом для изменения скорости движения машины является электронный сигнал контроллеру скорости движения буксирующего транспортного средства.
5. Распределяющая продукт машина по п. 1, в которой множеством датчиков массового потока являются оптические датчики.
6. Распределяющая продукт машина по п. 1, в которой множеством датчиков массового потока являются ударные датчики.
7. Распределяющая продукт машина по п. 1, в которой множеством датчиков массового потока являются как оптические датчики, так и ударные датчики в одном проходе для прохождения продукта из множества проходов для прохождения продукта.
8. Распределяющая продукт машина для передвижения по земле, содержащая:
резервуар, выполненный с возможностью удержания распределяемого продукта;
дозатор для регулирования выпуска продукта из резервуара;
по меньшей мере один проход для прохождения продукта, выполненный с возможностью направления продукта после дозатора;
по меньшей мере два датчика массового потока, выполненных с возможностью измерения скорости потока продукта через проходы для прохождения продукта, при этом каждый датчик из по меньшей мере двух датчиков выполнен с возможностью генерирования выходного сигнала, указывающего скорость потока продукта;
контроллер, выполненный с возможностью регулирования скорости привода дозатора с изменяющейся скоростью и изменения скорости привода дозатора во время процесса калибровки дозатора от настройки номинальной первой скорости для изменения скорости потока продукта до второй скорости, при которой повышается точность по меньшей мере одного датчика массового потока из множества датчиков массового потока; и
блок управления, соединенный с контроллером и принимающий выходные сигналы от датчиков массового потока, при этом блок управления выполнен с возможностью использования выходного сигнала того из двух датчиков, который имеет наивысшую точность для конкретной массовой скорости потока, измеряемой в заданное время.
9. Распределяющая продукт машина по п. 8, в которой по меньшей мере два датчика в проходе для прохождения продукта являются датчиками двух различных типов.
10. Распределяющая продукт машина по п. 8, в которой по меньшей мере одним датчиком является оптический датчик массового потока, а другим по меньшей мере является один ударный датчик массового потока.
11. Способ калибровки дозатора распределяющей продукт машины по п. 1, имеющей резервуар, выполненный с возможностью удержания распределяемого продукта, узел дозатора для регулирования выпуска продукта, удерживаемого резервуаром, множество проходов для прохождения продукта, выполненных с возможностью приема и направления продукта после дозатора, множество датчиков массового потока, выполненных с возможностью измерения скорости потока продукта через множество проходов для прохождения продукта, при этом каждый датчик из множества датчиков массового потока выполнен с возможностью генерирования выходного сигнала, указывающего скорость потока продукта, привод дозатора с изменяющейся скоростью, контроллер, выполненный с возможностью регулирования скорости привода дозатора с изменяющейся скоростью и изменения скорости привода дозатора во время процесса калибровки дозатора от настройки номинальной первой скорости для изменения скорости потока продукта до второй скорости, при которой повышается точность по меньшей мере одного датчика массового потока из множества датчиков массового потока, при этом способ включает этапы:
работы машины посредством передвижения машины по земле со скоростью движения машины, при этом приводя в действие дозатор с изменяющейся скоростью на первой номинальной скорости дозатора;
изменения номинальной первой скорости привода дозатора для изменения скорости потока продукта на вторую скорость дозатора, при которой повышается точность по меньшей мере одного датчика массового потока из множества датчиков массового потока;
во время приведения дозатора с изменяющейся скоростью в действие на второй скорости измерения скорости потока продукта через множество проходов для прохождения продукта;
вычисления массовой скорости потока за оборот дозатора с изменяющейся скоростью;
работы дозатора с изменяющейся скоростью на третьей скорости дозатора, определяемой из вычисленной массовой скорости потока за оборот дозатора с изменяющейся скоростью и скорости движения машины, для получения необходимой скорости потока на площадь, охватываемую распределяющей продукт машиной.
| AU 2011211377 A1, 01.03.2012 | |||
| Устройство для контроля, учета и автоматического управления работой сеялки | 1988 |
|
SU1616531A1 |
| Система регулирования плотности высева семян сеялкой | 1975 |
|
SU664526A3 |
| 0 |
|
SU255630A1 | |
| US 6584920 B1, 01.07.2003 | |||
| US 20120042815 A1, 23.02.2012. | |||

