ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее раскрытие относится к области техники устройств захвата изображений в инфракрасном спектре, и конкретно, к способу и устройству для осуществления коррекции паразитных пикселей в изображении, захваченном матрицей пикселей, чувствительной к инфракрасному излучению.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Устройства захвата инфракрасных (ИК) изображений, такие как микроболометры или охлаждаемые устройства захвата ИК-изображений, содержат матрицу чувствительных к ИК-излучению детекторов, образующих матрицу пикселей. Для осуществления коррекции пространственной неоднородности между пикселями такой матрицы пикселей обычно применяется коррекция смещения и усиления к каждому сигналу пикселя (или "значению пикселя") захваченного изображения до того, как его отображают. Значения смещения и усиления генерируются в ходе заводской предварительной калибровки устройства с использованием однородных излучающих источников (черных тел) при регулируемых температурах и сохраняются устройством захвата изображений. Такая пространственная неоднородность изменяется не только во времени, но также и в зависимости от температуры оптических, механических и электронных частей устройства захвата изображений, и, следовательно, внутренний механический затвор часто используется в устройстве захвата изображений, чтобы содействовать коррекции изображения. Это включает в себя захват изображения периодически, тогда как затвор закрыт, чтобы получить опорное изображение для относительно однородной сцены, каковое затем может использоваться для калибровки.
Общеизвестно, что после процесса изготовления таких устройств захвата инфракрасных изображений один или несколько пикселей в матрице пикселей указываются являющимися нерабочими в конце фазы первоначальной калибровки изготовителем. В области техники такие пиксели общеизвестны как "дефектные пиксели" и они идентифицированы в карте работоспособности, сохраняемой устройством захвата изображений. На значения пикселей, генерируемые по плохим пикселям, обычно нельзя полагаться, и, следовательно, их значения пикселей заменяют значением, сгенерированным на основе соседних пикселей в изображении.
Кроме того, было установлено, что в течение срока службы таких устройств захвата изображений поведение сигнала одного или нескольких первоначально рабочих пикселей может более не описываться удовлетворительно их параметрами первоначальной калибровки. Это может возникать из-за различных физических модификаций или даже механического повреждения, вызванного малыми внутренними движущимися частицами, оставленными или освобожденными, в блоке датчиков, например. Эти пиксели будут именоваться в документе паразитными пикселями. Такие пиксели не приводятся в списке в первоначальной карте работоспособности, и они могут снижать качество изображения.
В отношении оснащенных затвором устройств захвата изображений, французская заявка на патент, опубликованная как документ FR3009388, раскрывает способ идентификации таких паразитных пикселей в течение любого периода закрытия затвора, предоставляя средство для повторяющегося обновления карты работоспособности.
Однако, имеются несколько недостатков использования затвора, такие как добавочные вес и стоимость, и хрупкость этого компонента. Кроме того, для некоторых применений использование затвора является неприемлемым из-за времени, которое теряется, пока затвор закрыт, и имеет место калибровка. В течение этого периода калибровки нельзя получать какое-либо изображение сцены.
В без-затворном устройстве захвата изображений имеется техническая трудность идентификации таких паразитных пикселей из сцены изображения, особенно если значения пикселей находятся в текстурированной зоне захваченного изображения.
При допущении, что паразитные пиксели могут быть идентифицированы, такие паразитные пиксели можно просто добавлять к списку плохих пикселей. Однако если устройство захвата изображений принимает, например, многократную ударную нагрузку в течение своего срока службы, в той точке, где плотность паразитных пикселей в изображении может более не оставаться незначительной, результатом будет ухудшение качества изображения.
Таким образом, в области техники имеется потребность, в частности для без-затворного захвата инфракрасных изображений, в устройстве и способе обнаружения паразитных пикселей, по меньшей мере, чтобы обновлять карту работоспособности, но также и повторно калибровать конкретные паразитные пиксели, которые становятся некорректно калиброванными.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Цель вариантов осуществления по настоящему описанию состоит в том, чтобы по меньшей мере частично разрешить одну или несколько потребностей известного уровня техники.
Согласно одному аспекту, предложен способ обнаружения паразитных пикселей чувствительной к инфракрасному излучению матрицы пикселей устройства захвата изображений, содержащий: прием устройством обработки в устройстве захвата изображений, входного изображения, захваченного матрицей пикселей; вычисление оценочного показателя для множества целевых пикселей, содержащей по меньшей мере некоторые из пикселей входного изображения, оценочный показатель для каждого целевого пикселя генерируют на основе  пикселей входного изображения, выбранного в окне
пикселей входного изображения, выбранного в окне  × пикселей вокруг целевого пикселя, является нечетным целым числом 3 или более, и является целым числом между 2 и 5, каждый из пикселей совокупности, образуемой k пикселями и целевым пикселем, совместно использует по меньшей мере одну границу или угол с другим пикселем упомянутой совокупности, и значения k пикселей находятся на соответственных расстояниях от значения целевого пикселя, k пикселей выбирают на основе k расстояний; и обнаружение, что по меньшей мере один из целевых пикселей является паразитным пикселем, на основе вычисленных оценочных показателей.
× пикселей вокруг целевого пикселя, является нечетным целым числом 3 или более, и является целым числом между 2 и 5, каждый из пикселей совокупности, образуемой k пикселями и целевым пикселем, совместно использует по меньшей мере одну границу или угол с другим пикселем упомянутой совокупности, и значения k пикселей находятся на соответственных расстояниях от значения целевого пикселя, k пикселей выбирают на основе k расстояний; и обнаружение, что по меньшей мере один из целевых пикселей является паразитным пикселем, на основе вычисленных оценочных показателей.
Согласно одному варианту осуществления, H является нечетным целым числом, равным 5 или более.
Согласно одному варианту осуществления, выбор k пикселей содержит последовательные этапы: формирования, вокруг целевого пикселя, первой группы, состоящей из всех пикселей, совместно использующих по меньшей мере одну границу или угол с целевым пикселем, за исключением целевого пикселя, и выбор в рамках этой первой группы первого пикселя, имеющего значение, которое является ближайшим к таковому целевого пикселя; формирование второй группы, состоящей из первой группы, за исключением первого выбранного пикселя, и из всех пикселей, совместно использующих по меньшей мере одну границу или угол с первым выбранным пикселем, и выбор в рамках этой второй группы второго пикселя, имеющего значение, которое является ближайшим к таковому целевого пикселя; и повторение операций расширения группы отбора и затем осуществление выбора каждого последующего пикселя, в каждой новой расширенной группе соответственно, имеющего значение, ближайшее к таковому целевого пикселя, до тех пор, пока не будут выбраны k пикселей.
Согласно одному варианту осуществления, k пикселей выбирают, чтобы минимизировать сумму k расстояний.
Согласно одному варианту осуществления, оценочный показатель равен сумме k расстояний.
Согласно одному варианту осуществления, обнаружение по меньшей мере одного паразитного пикселя содержит сравнение по меньшей мере некоторых их оценочных показателей с пороговым значением ( ).
).
Согласно одному варианту осуществления, сравнение по меньшей мере некоторых из оценочных показателей с пороговым значением включает в себя сравнение подмножества оценочных показателей с пороговым значением, подмножество содержит множество наивысших оценочных показателей, и при этом пороговое значение вычисляют на основе следующего уравнения:

где  является параметром, равным по меньшей мере 1,0, и
является параметром, равным по меньшей мере 1,0, и  и
и  являются соответственно первым и третьим квартилями подмножества.
являются соответственно первым и третьим квартилями подмножества.
Согласно одному варианту осуществления, по меньшей мере некоторые оценочные показатели выбирают, применяя дополнительный порог ( ) к вычисленным оценочным показателям.
) к вычисленным оценочным показателям.
Согласно одному варианту осуществления, дополнительный порог вычисляют на основе допущения, что значения пикселей в изображении имеют распределение вероятностей на основе распределения Лапласа.
Согласно одному варианту осуществления, дополнительный порог вычисляют на основе следующего уравнения:

где  является оценкой параметра экспоненциального распределения
является оценкой параметра экспоненциального распределения  , соответствующего абсолютному значению (
, соответствующего абсолютному значению ( ) вычисленных оценочных показателей.
) вычисленных оценочных показателей.
Согласно одному варианту осуществления, способ дополнительно содержит, до вычисления упомянутых оценочных показателей, коррекцию первого входного изображения путем применения значений усиления и смещения по меньшей мере к некоторым значениям из значений пикселей первого входного изображения.
Согласно дополнительному аспекту, обеспечивается читаемый компьютером носитель, хранящий команды для выполнения способа по любому из п.п.1-7 при исполнении устройством обработки.
Согласно дополнительному аспекту, обеспечивается устройство обработки изображений, содержащее: память, хранящую входное изображение; и устройство обработки, выполненное с возможностью: принимать входное изображение, захваченное матрицей пикселей; вычислять оценочный показатель для совокупности целевых пикселей, содержащей по меньшей мере некоторые из пикселей входного изображения, оценочный показатель для каждого целевого пикселя генерируют на основе пикселей входного изображения, выбранных в окне × пикселей вокруг целевого пикселя, H является нечетным целым числом 3 или более, и является целым числом между 2 и 5, каждый из пикселей совокупности, образуемой k пикселями и целевым пикселем, совместно использует по меньшей мере одну границу или угол с другим пикселем упомянутой совокупности, и значения k пикселей находятся на соответственных расстояниях от значения целевого пикселя, k пикселей выбирают на основе k расстояний; и обнаруживать, что по меньшей мере один из целевых пикселей является паразитным пикселем, на основе вычисленных оценочных показателей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Предшествующие и другие признаки и преимущества станут очевидными из последующего подробного описания вариантов осуществления, данных в качестве иллюстрации, а не ограничения, со ссылкой на сопроводительные чертежи, на которых:
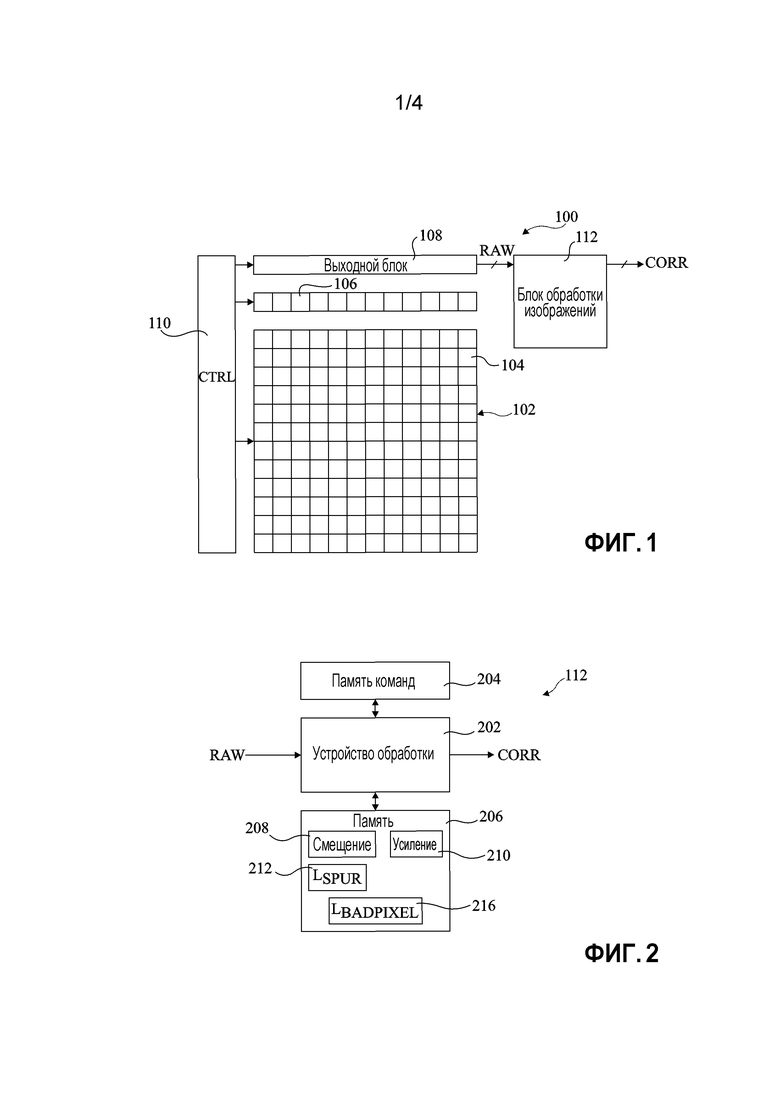
Фигура 1 схематично иллюстрирует устройство захвата изображений согласно примерному варианту осуществления;
Фигура 2 схематично иллюстрирует блок обработки изображений в устройстве захвата изображений по Фиг.1 более подробно согласно примерному варианту осуществления;
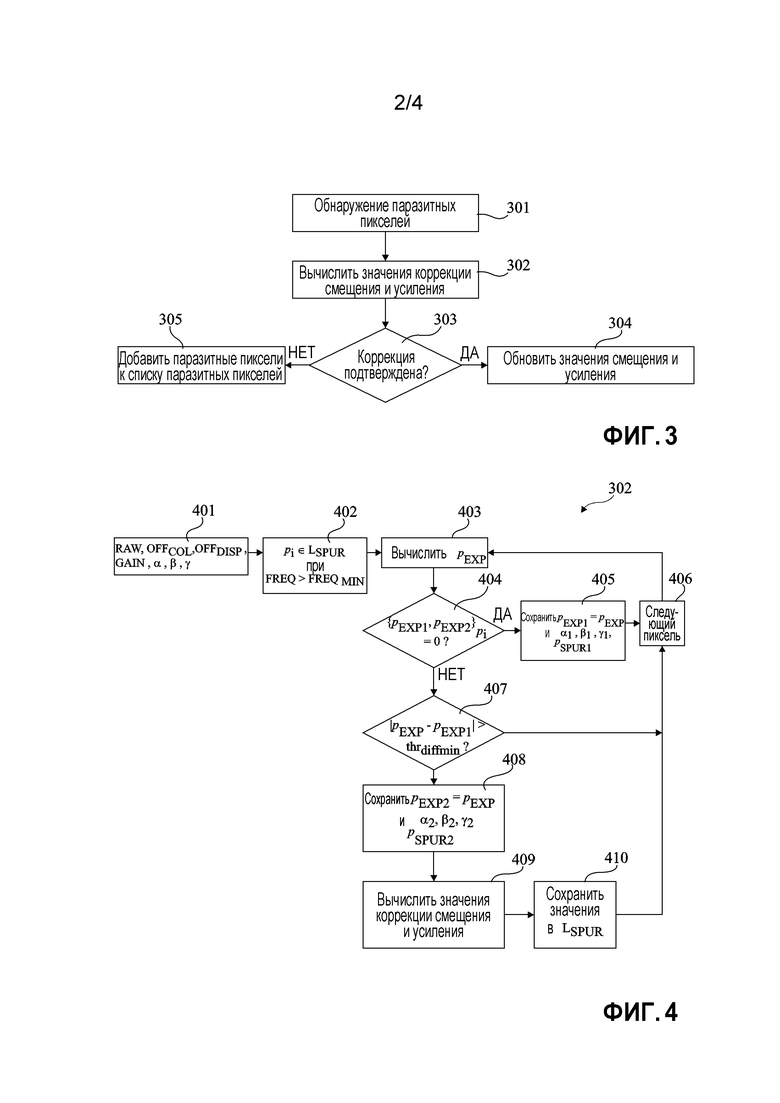
Фигура 3 - структурная схема, показывающая операции в способе обнаружения и коррекции паразитных пикселей согласно примерному варианту осуществления настоящего раскрытия;
Фигура 4 - структурная схема, иллюстрирующая операции в способе генерирования значений коррекции смещения и усиления согласно примерному варианту осуществления настоящего раскрытия;
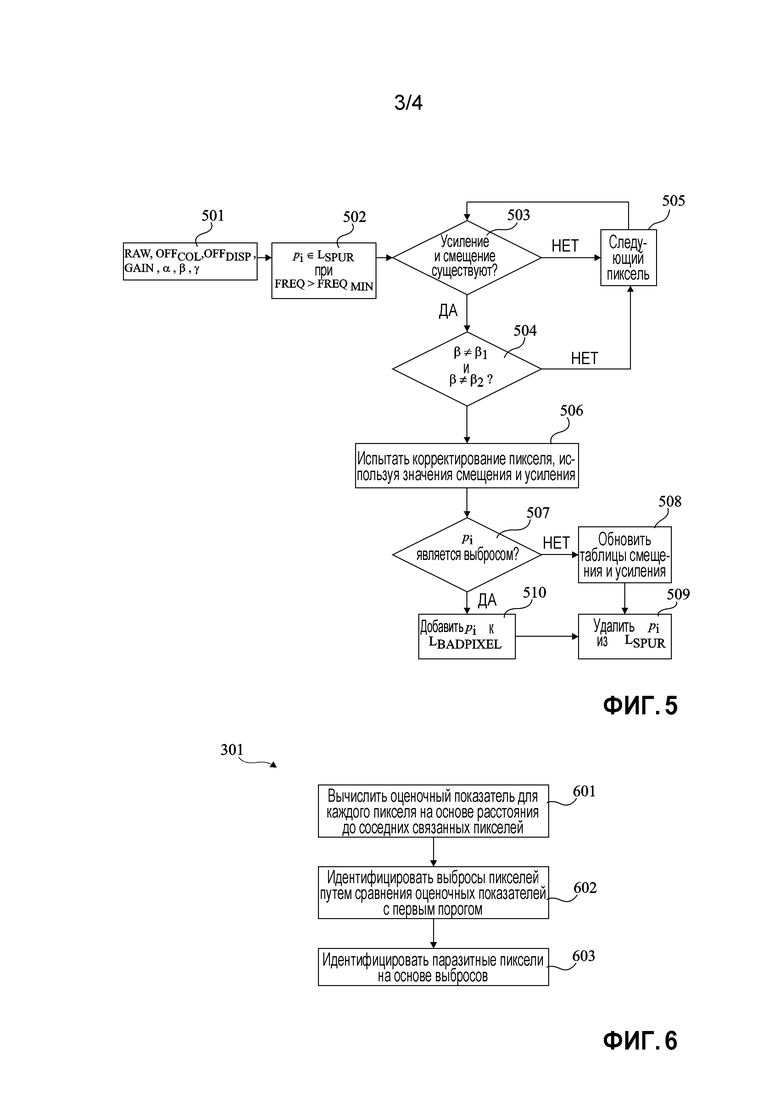
Фигура 5 - структурная схема, иллюстрирующая операции в способе подтверждения значений коррекции смещения и усиления согласно примерному варианту осуществления;
Фигура 6 - структурная схема, иллюстрирующая операции в способе идентификации паразитных пикселей согласно примерному варианту осуществления;
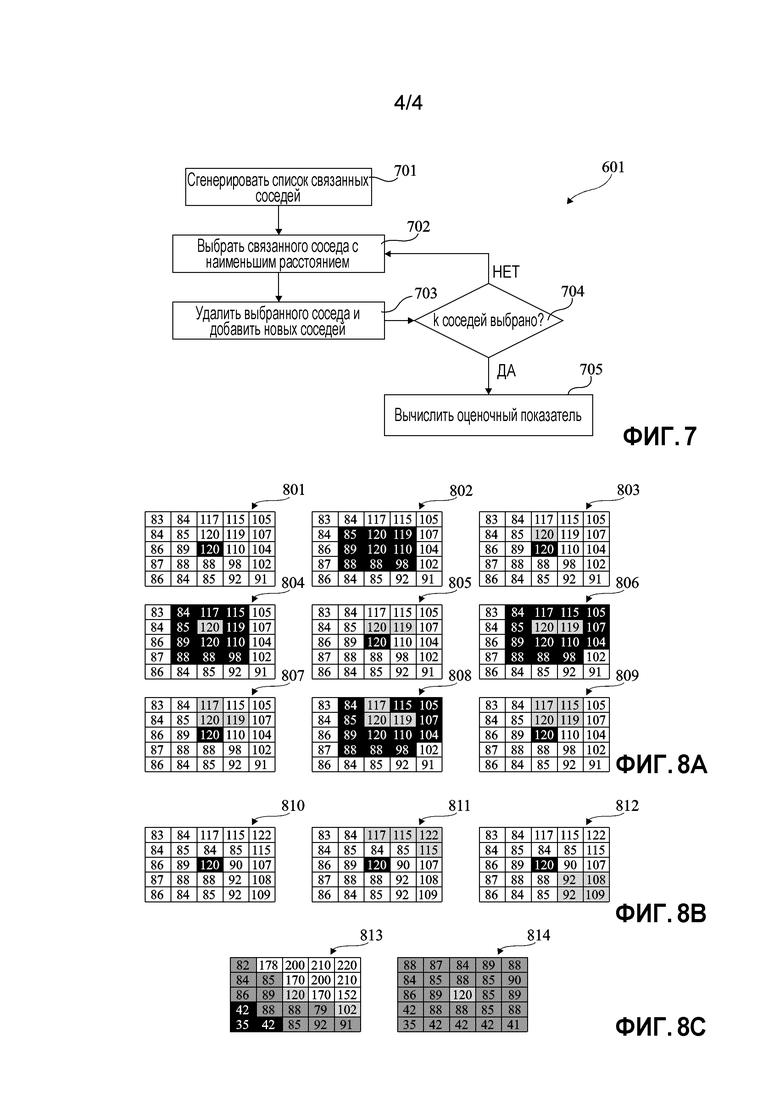
Фигура 7 - структурная схема, иллюстрирующая операции в способе генерирования оценочных показателей пикселей согласно примерному варианту осуществления;
Фигура 8A иллюстрирует пример выбора связанных соседних пикселей согласно примерному варианту осуществления настоящего раскрытия;
Фигура 8B иллюстрирует примеры связанных и несвязанных соседних пикселей согласно примерному варианту осуществления; и
Фигура 8C иллюстрирует пример края и паразитного пикселя согласно примерному варианту осуществления.
ПОДРОБНОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Хотя некоторые из вариантов осуществления в последующем описании описываются в отношении матрицы пикселей типа микроболометра, специалистам в данной области техники будет очевидно, что способы, описанные здесь, могут в равной степени применяться к другим типам устройств захвата ИК изображений, включая охлаждаемые устройства. Кроме того, хотя варианты осуществления описаны здесь в отношении без-затворного устройства захвата ИК изображений, они могут в равной степени применяться к устройству захвата ИК изображений, содержащему механический затвор, и к изображениям, полученным посредством такого устройства.
Фигура 1 иллюстрирует устройство 100 захвата ИК изображений, содержащее матрицу 102 пикселей, чувствительную к ИК-излучению. Например, в некоторых вариантах осуществления матрица пикселей является чувствительной к длинноволновому ИК-излучению, такому как излучение с длиной волны между 7 и 13 мкм. Устройство 100, например, способно получать одиночные изображения, а также последовательности изображений, образующие видео. Устройство 100 является, например, устройством без затвора.
Для простоты иллюстрации на Фиг.1 иллюстрируется матрица 102 пикселей только из 144 пикселей 104, организованных в 12 строк и 12 столбцов. В альтернативных вариантах осуществления матрица 102 пикселей может содержать любое число строк и столбцов пикселей. Обычно, матрица, например, содержит 640 × 480 или 1024 × 768 пикселей.
Каждый столбец пикселей в матрице 102 ассоциируется с соответствующей опорной структурой 106. Хотя функционально не элемент изображения, эта структура будет именоваться в документе "опорным пикселем" по структурной аналогии с формирующими изображение (или активными) пикселями 104. Кроме того выходной блок (OUTPUT) 108 соединен с каждым столбцом матрицы 102 пикселей и с каждым из опорных пикселей 106, и обеспечивает необработанное изображение  .
.
Схема (CTRL) 110 управления, например, обеспечивает управляющие сигналы на матрицу пикселей, на опорные пиксели 106 и на выходной блок 108. Необработанное изображение , например, обеспечивается на блок 112 обработки изображений (IMAGE PROCESSING), который применяет смещения и усиления к пикселям изображения, чтобы создать скорректированное изображение  .
.
Каждый из пикселей 104, например, содержит болометр. Болометры известны в области техники, и, например, содержат мембрану, взвешенную над подложкой, содержащую слой поглощающего ИК-излучение материала и имеющую характеристику, что их сопротивление изменяется с возрастанием температуры мембраны, связанным с присутствием ИК излучения.
Опорный пиксель 106, ассоциированный с каждым столбцом, например, содержит слепой болометр, который, например, имеет структуру, подобную активным болометрам пикселей 104 матрицы, но визуализируемым нечувствительными к излучению из сцены изображения, например, посредством защитного средства, образуемого отражающим экраном, и/или посредством теплоотвода по конструктивному решению, например, согласно обеспечению высокой теплопроводности для подложки, болометр, например, формируется в прямом контакте с подложкой.
В ходе операции чтения матрицы 102 пикселей, строки пикселей, например, считываются по одной.
Пример матрицы пикселей типа болометра, например, обсуждается более подробно в переуступленном настоящему заявителю патенте США US 7700919, содержание которого тем самым включено по ссылке в мере, разрешенной законом.
Фигура 2 иллюстрирует блок 112 обработки изображений по Фиг.1 более подробно согласно примерному варианту осуществления.
Функции блока 112 обработки изображений, например, реализуются в программном обеспечении, и блок 112 обработки изображений содержит устройство 202 обработки (PROCESSING DEVICE) с наличием одного или нескольких процессоров под управлением команд, хранящихся в памяти 204 для хранения команд (INSTR MEMORY). В альтернативных вариантах осуществления функции блока 112 обработки изображений могут быть реализованы, по меньшей мере частично, специализированными аппаратными средствами. В таком случае устройство 202 обработки, например, содержит ASIC (специализированную интегральную схему) или FPGA (базовый матричный кристалл), и память 204 команд может быть опущена.
Устройство 202 обработки принимает необработанное входное изображение , и генерирует скорректированное изображение , которое, например, предоставляется на дисплей (не проиллюстрирован) устройства захвата изображений. Устройство 202 обработки также соединено с памятью 206 данных (MEMORY), хранящую значения 208 смещения ( ), значения 210 усиления (
), значения 210 усиления ( ), список (
), список ( ) 212 идентифицированных паразитных пикселей и список плохих пикселей (
) 212 идентифицированных паразитных пикселей и список плохих пикселей ( ).
).
Значения смещения, например, представляются вектором  , представляющим структурный столбцовый разброс, и матрицей
, представляющим структурный столбцовый разброс, и матрицей  , представляющей нестолбцовую структурную 2D-дисперсию, вводимую матрицей 102 пикселей. Столбцовый разброс, например, преимущественно происходит из-за использования опорного пикселя 106 в каждом столбце, хотя строка опорных пикселей столбца обычно не является совершенно однородной. Нестолбцовая 2D дисперсия, например, преимущественно происходит из-за локальных физических и/или структурных различий между активными болометрами матрицы пикселей, имеющих место, например, из-за дисперсии технологического процесса.
, представляющей нестолбцовую структурную 2D-дисперсию, вводимую матрицей 102 пикселей. Столбцовый разброс, например, преимущественно происходит из-за использования опорного пикселя 106 в каждом столбце, хотя строка опорных пикселей столбца обычно не является совершенно однородной. Нестолбцовая 2D дисперсия, например, преимущественно происходит из-за локальных физических и/или структурных различий между активными болометрами матрицы пикселей, имеющих место, например, из-за дисперсии технологического процесса.
Генерация вектора и матрицы , и коррекция значений пикселей на основе этого вектора и матрицы описываются более подробно в заявке на патент США US 14/695539, поданной 24 апреля 2015, переуступленной настоящему заявителю, содержание которой тем самым включено путем ссылки в мере, разрешенной законом, и во французской заявке на патент FR 14/53917, поданной 30 апреля 2014, и в японской патентной заявке JP 2015-093484, поданной 30 апреля 2015, также от имени настоящего заявителя.
Теперь будет описываться способ, как описан в этих заявках. Считается, что необработанное изображение было захвачено посредством матрицы 102 пикселей по Фиг.1, и что матрица пикселей относится к типу, что каждый столбец матрицы ассоциирован с соответствующим опорным пикселем 106.
Скорректированное изображение , например, генерируется на основе необработанного изображения путем применения следующего уравнения:
 (1)
(1)
где  являются координатами пикселей для пикселей 104,
являются координатами пикселей для пикселей 104,  и
и  являются масштабными коэффициентами,
являются масштабными коэффициентами,  является значением коррекции усиления,
является значением коррекции усиления,  является значением усиления,
является значением усиления,  и
и  являются значениями смещения,
являются значениями смещения,  является матрицей, содержащей в каждой из своих строк столбцовый вектор , является опорной матрицей дисперсии, и res является остаточной коррекцией, которая, например, используется в некоторых вариантах осуществления для выполнения коррекции каких-либо постолбцовых остатков и/или остатков дисперсии, оставшихся в изображении.
является матрицей, содержащей в каждой из своих строк столбцовый вектор , является опорной матрицей дисперсии, и res является остаточной коррекцией, которая, например, используется в некоторых вариантах осуществления для выполнения коррекции каких-либо постолбцовых остатков и/или остатков дисперсии, оставшихся в изображении.
Масштабный коэффициент , например, определяют на основе следующего уравнения:
 (2)
(2)
где T() представляет фильтр верхних частот, применяемый к столбцовому вектору и к входному изображению , и  является числом строк в изображении. Другими словами, определение масштабного коэффициента
является числом строк в изображении. Другими словами, определение масштабного коэффициента  , например, включает в себя применение фильтра верхних частот к необработанному изображению по его строкам, а также к опорному столбцовому вектору; определение постолбцовых средних фильтрованного изображения, приводящее к вектору такой же размерности, что и опорный столбцовый вектор, и затем определения масштабного коэффициента в виде минимизации разностей между двумя столбцовыми векторами, то есть, между постолбцовыми средними фильтрованного изображения и фильтрованным столбцовым вектором.
, например, включает в себя применение фильтра верхних частот к необработанному изображению по его строкам, а также к опорному столбцовому вектору; определение постолбцовых средних фильтрованного изображения, приводящее к вектору такой же размерности, что и опорный столбцовый вектор, и затем определения масштабного коэффициента в виде минимизации разностей между двумя столбцовыми векторами, то есть, между постолбцовыми средними фильтрованного изображения и фильтрованным столбцовым вектором.
Масштабный коэффициент , например, определяют на основе следующего уравнения:
 (3)
(3)
где  - значение градиента пикселя между смежными пикселями в горизонтальном направлении в изображении, другими словами, по каждой строке, и
- значение градиента пикселя между смежными пикселями в горизонтальном направлении в изображении, другими словами, по каждой строке, и  - значение градиента пикселя между смежными пикселями в вертикальном направлении в изображении, другими словами, по каждому столбцу.
- значение градиента пикселя между смежными пикселями в вертикальном направлении в изображении, другими словами, по каждому столбцу.
Хотя в последующем коррекция усиления и смещения описана основывающейся на уравнениях 1-3 выше, в альтернативных вариантах осуществления могут использоваться другие способы коррекции.
Фигура 3 является структурной схемой, показывающей операции в способе выполнения обнаружения и коррекции паразитных пикселей согласно примерному варианту осуществления. Этот способ, например, реализуется схемой 112 по Фиг.2 всякий раз, когда захватывается новое изображение.
Паразитные пиксели являются пикселями, для которых смещение и усиление отклонились от своих первоначально калиброванных значений, например, в результате механического удара или повреждения, вызванного малыми внутренними движущимися частицами. Паразитный пиксель может соответствовать добавочному "плохому пикселю", который, например, был разрушен и, следовательно, не может давать применимый сигнал в связи со сценой. Однако изобретатели настоящей заявки и установили, что часто паразитный пиксель все еще может быть способным давать применимый сигнал в связи со сценой, но его значение стало устойчиво постоянно сдвинутым по смещению и усилению относительно первоначально калиброванного значения.
В операции 301 обнаруживают паразитные пиксели в изображении , которое соответствует необработанному изображению , скорректированному на основе значения усиления и смещения. Обнаруженные паразитные пиксели образуют список . Как будет описано более подробно ниже, в одном варианте осуществления паразитные пиксели обнаруживают на основе вычисления расстояния (в терминах значений пикселей) до связанных соседей каждого пикселя в изображении. Однако в альтернативных вариантах осуществления могут применяться другие способы, чтобы идентифицировать паразитные пиксели. Например, один или несколько паразитных пикселей могут быть идентифицированы пользователем вручную. Кроме того, в некоторых вариантах осуществления, изображение может быть однородной сценой, например, если его получают с закрытым затвором устройства захвата изображений, посредством этого содействуя идентификации паразитных пикселей.
В последующей операции 302, значения коррекции смещения и усиления вычисляют для каждого идентифицированного паразитного пикселя. Другими словами, для каждого идентифицированного паразитного пикселя значения коррекции вычисляют, чтобы выполнить коррекцию сохраненных на текущий момент значений смещения и усиления. Это вычисление, например, основывается на по меньшей мере двух захваченных изображениях.
В последующей операции 303, подтверждение этих значений коррекции смещения и усиления, например, выполняется для каждого паразитного пикселя. Подтверждение, например, выполняется при другой температуре фокальной плоскости по отношению к температуре, когда вычислялись значения коррекции смещения и усиления, чтобы верифицировать, что вычисленные коррекции обеспечивают подходящую коррекцию для этих пикселей, если изменяется температура фокальной плоскости. Температура фокальной плоскости соответствует температуре матрицы пикселей. Другими словами, изобретатели заметили, что по меньшей мере часть обнаруженных паразитных пикселей все еще могут постоянно корректироваться, даже если их смещение и усиление сдвинулись, и что качество вычисленных значений коррекции усиления и смещения, полученных для этих паразитных пикселей, например, подтверждается их устойчивостью, хотя температура фокальной плоскости изменилась.
Если в операции 303 значения коррекции усиления и смещения подтверждаются, значения 208, 210 усиления и смещения для паразитных пикселей, например, обновляются в операции 304 значениями коррекции, вычисленными в операции 302.
Альтернативно, если в операции 303 значения коррекции усиления и смещения не подтверждаются, в операции 305 паразитные пиксели добавляются к списку плохих пикселей. Другими словами, паразитные пиксели, для которых коррекции являются нестабильными при изменении температуры фокальной плоскости, классифицируются как добавочные плохие пиксели. У пикселей в списке плохих пикселей, например, их значения пикселей заменяют оценкой пикселей, основанной на одном или нескольких из их соседних пикселей.
В альтернативном варианте осуществления все паразитные пиксели, идентифицированные в операции 301, систематически добавляют к списку плохих пикселей и затем только удаляют из этого списка, если коррекция подтверждается в операции 303.
В некоторых вариантах осуществления, вместо попытки выполнения коррекции пикселей, идентифицированных как паразитные, операции 302, 303 и 304 могут быть опущены, и способ может систематически включать в себя добавление всех обнаруженных паразитных пикселей к списку плохих пикселей в операции 305. Такой подход сбережет расходы на обработку, связанные с операциями 302 и 303. В качестве еще дополнительной альтернативы, некоторые пиксели могут первоначально добавляться к списку плохих пикселей, и если число плохих пикселей превышает пороговый уровень, один или несколько ранее идентифицированных паразитных пикселей, либо один или несколько вновь идентифицированных паразитных пикселей можно скорректировать, используя операции 302 и 303.
Фигура 4 является структурной схемой, иллюстрирующей пример операций для вычисления значений коррекции смещения и усиления в операции 302 по Фиг.3.
В операции 401, например, получают изображение, и значения пикселей по меньшей мере некоторых из пикселей корректируют, используя значения 208, 210 смещения и усиления, например, на основе уравнения 1 выше. Входными данными для способа являются, например, необработанное захваченное изображение , значения и смещения, значения усиления и элементы , и , используемые для коррекции изображения согласно уравнению 1 выше. Также полагают, что список паразитных пикселей был сгенерирован в операции 301 по Фиг.3.
В операции 402, выбирают пиксели  списка , для которых частота обнаружения
списка , для которых частота обнаружения  превышает пороговый уровень
превышает пороговый уровень  , и следующие операции способа выполняются только на этих пикселях. Эта операция, например, означает, что алгоритм коррекции применяется только к пикселям, которые многократно обнаруживаются как паразитные пиксели. Например, каждый раз, когда пиксель обнаруживается как паразитный пиксель, частоту обнаружения вычисляют являющейся равной числу раз, которое пиксель был обнаружен как паразитный в предыдущих
, и следующие операции способа выполняются только на этих пикселях. Эта операция, например, означает, что алгоритм коррекции применяется только к пикселям, которые многократно обнаруживаются как паразитные пиксели. Например, каждый раз, когда пиксель обнаруживается как паразитный пиксель, частоту обнаружения вычисляют являющейся равной числу раз, которое пиксель был обнаружен как паразитный в предыдущих  изображениях, где находится, например, между 2 и 20. Если эта частота выше , равна, например,
изображениях, где находится, например, между 2 и 20. Если эта частота выше , равна, например,  , то пиксель выбирают. В некоторых вариантах осуществления эту операцию опускают, и последующие операции способа применяются ко всем пикселям в списке .
, то пиксель выбирают. В некоторых вариантах осуществления эту операцию опускают, и последующие операции способа применяются ко всем пикселям в списке .
В операции 403, вычисляют ожидаемое значение  пикселя. Например, когда пиксель стал паразитным, его значение
пикселя. Например, когда пиксель стал паразитным, его значение  , после коррекции усиления и смещения, но которое было идентифицировано как выброс, может быть выражено в виде:
, после коррекции усиления и смещения, но которое было идентифицировано как выброс, может быть выражено в виде:
 (4)
(4)
где  - значение пикселя для паразитного пикселя матрицы ,
- значение пикселя для паразитного пикселя матрицы ,  и
и  являются значениями матриц и , применяемые к пикселю,
являются значениями матриц и , применяемые к пикселю,  является значением матрицы , применяемым к пикселю, и , , и res являются такими же, что и для уравнения 1 выше. При условии, что этот пиксель может быть надлежаще скорректирован, существуют значения
является значением матрицы , применяемым к пикселю, и , , и res являются такими же, что и для уравнения 1 выше. При условии, что этот пиксель может быть надлежаще скорректирован, существуют значения  и
и  коррекции усиления и смещения такие, что:
коррекции усиления и смещения такие, что:
 (5)
(5)
где - ожидаемое значение пикселя, и является, например, равным или близким значению, которое может быть получено, если значения усиления и смещения были повторно вычислены на основе одного или нескольких новых опорных изображений. При условии, что имеются два неизвестных, чтобы определить значения обоих и , два ожидаемых значения, например, вычисляют, как теперь будет описано.
Величину ожидаемого значения , например, вычисляют на основе его соседних пикселей. Например, применяют алгоритм, обычно используемый для коррекции плохих пикселей, такой как интерполяция, экстраполяция пиксельных данных и/или способ, известный в области техники как восстановление заполнением (Inpainting).
В операции 404, верифицируют, является также доступным или нет, в дополнение к новому значению , предыдущее значение  или
или  для пикселя , другими словами является ли пустым множество
для пикселя , другими словами является ли пустым множество  . Если существует предыдущее значение , это означает, что оно было определено для предыдущего изображения, в котором значения пикселей по меньшей мере некоторых из пикселей были скорректированы с использованием тех же значений 208, 210 смещения и усиления в качестве применяемых к текущему изображению. Другими словами, позиции пикселей, скорректированных в текущем и предыдущем изображениях, являются, например, теми же. Если множество является пустым и нет предыдущих значений, то в операции 405 значение сохраняется как , и масштабные коэффициенты и и значение коррекции усиления, применяемые к пикселю, сохраняются как значения
. Если существует предыдущее значение , это означает, что оно было определено для предыдущего изображения, в котором значения пикселей по меньшей мере некоторых из пикселей были скорректированы с использованием тех же значений 208, 210 смещения и усиления в качестве применяемых к текущему изображению. Другими словами, позиции пикселей, скорректированных в текущем и предыдущем изображениях, являются, например, теми же. Если множество является пустым и нет предыдущих значений, то в операции 405 значение сохраняется как , и масштабные коэффициенты и и значение коррекции усиления, применяемые к пикселю, сохраняются как значения  ,
,  ,
,  , и значение пикселя также сохраняется как значение
, и значение пикселя также сохраняется как значение  . В операции 406, например, выбирают следующий пиксель списка , для которого частота обнаружения больше чем , и способ возвращается к операции 403.
. В операции 406, например, выбирают следующий пиксель списка , для которого частота обнаружения больше чем , и способ возвращается к операции 403.
Если, когда выполняется операция 404, уже имеется значение для пикселя, в последующей операции 407, например, определяют, является или нет абсолютная разность между новым значением и предыдущим значением выше порогового значения  . В противном случае способ возвращается к операции 406. Если, однако, значения пикселей достаточно разнесены, то следующей операцией является 408.
. В противном случае способ возвращается к операции 406. Если, однако, значения пикселей достаточно разнесены, то следующей операцией является 408.
В операции 408, новое значение сохраняется как , и масштабные коэффициенты и и значение коррекции усиления, применяемые к пикселю, сохраняются как значения  ,
,  ,
,  , и значение пикселя также сохраняется как значение
, и значение пикселя также сохраняется как значение  .
.
В операции 409, значения  и коррекции смещения и усиления, например, вычисляют на основе оценок и . Например, значение вычисляют на основе следующего уравнения:
и коррекции смещения и усиления, например, вычисляют на основе оценок и . Например, значение вычисляют на основе следующего уравнения:
 (7)
(7)
где  .
.
Значение , например, вычисляют на основе следующего уравнения:
 (8)
(8)
Конечно, будет возможным сначала вычислить значение и затем подставить это значение для вычисления значения .
В последующей операции 410, значения и коррекции усиления и смещения, например, сохраняются в списке в ассоциации с пикселем  . Способ затем, например, возвращается к операции 406 до тех пор, пока не будут обработаны все пиксели в списке , для которых частота обнаружения больше, чем . Способ затем, например, повторяется, когда захватывается следующее изображение.
. Способ затем, например, возвращается к операции 406 до тех пор, пока не будут обработаны все пиксели в списке , для которых частота обнаружения больше, чем . Способ затем, например, повторяется, когда захватывается следующее изображение.
Хотя в некоторых вариантах осуществления вычисленные значения и коррекции смещения и усиления могут использоваться, чтобы непосредственно модифицировать значения 208, 210 усиления и смещения, по меньшей мере одна верификация этих значений, например, выполняется, чтобы верифицировать их действительность в присутствии изменения температуры, как будет теперь описано со ссылкой на Фиг.5.
Фигура 5 является структурной схемой, иллюстрирующей пример реализации операции 303 по Фиг.3 для подтверждения значений коррекции усиления и смещения для одного или нескольких пикселей.
В операции 501, изображение захватывается и корректируется с использованием значений 208, 210 смещения и усиления, обеспечивая в качестве входных данных захваченное изображение и значения , смещения, значения усиления, и элементы , и , используемые для выполнения коррекции изображения согласно уравнению 1 выше. Кроме того, например, принимается показание температуры фокальной плоскости. Действительно, как упомянуто выше относительно операции 303 по Фиг.3, подтверждение значений смещения и усиления, например, выполняют при другой температуре фокальной плоскости относительно той, когда вычислялись значения смещения и усиления. Таким образом, показание температуры фокальной плоскости используется, чтобы проверять, изменилась ли температура фокальной плоскости. В примере по Фиг.5 показание температуры дается значением масштабного коэффициента , который изменяется в зависимости от температуры. Изобретатели отметили, что информация о температуре, обеспечиваемая коэффициентом , является достаточно надежной в этом контексте подтверждения новых коррекций паразитных пикселей. Однако, в альтернативных вариантах осуществления, может использоваться значение T температуры, сгенерированное датчиком температуры. Например, матрица пикселей содержит датчик температуры, встроенный в матрицу или находящийся в контакте с ней, чтобы предоставлять температуру фокальной плоскости.
В операции 502, пиксели выбирают, например, из пикселей в списке , для которых частота обнаружения превышает пороговый уровень , и последующие операции способа выполняются только на этих пикселях.
В операции 503 затем определяют, существуют ли значения коррекции усиления и смещения для первого пикселя из пикселей . Если так, следующей операцией является 504, тогда как если нет, следующей операцией является 505, в которой выбирают следующий пиксель в списке, и способ возвращается к операции 503.
В альтернативных вариантах осуществления способ по Фиг.5 может применяться ко всем пикселям в списке, для которых были вычислены значения коррекции смещения и усиления, независимо от частоты обнаружения. Таким образом, операция 502 может быть опущена.
В операции 504 определяют, является ли текущее, зависящее от температуры значение равным или близким какому-либо значению из значений и , ассоциированных с пикселями и , сохраненными в списке в операциях соответственно 405 и 408 способа по Фиг.4. Например, определяют, является ли абсолютная разность между и выше порога  , и является ли абсолютная разность между и выше порога . Если любая из этих разностей меньше порогового значения, способ, например, возвращается к операции 505. Если, однако, было существенное изменение температуры (изменение ) с момента вычисления значений коррекции усиления и смещения, следующей операцией является 506. Как замечено выше, вместо использования масштабного коэффициента в качестве показания температуры, значение T температуры может быть получено посредством датчика температуры. В таком случае, значения , и будут заменены в операции 504 по Фиг.5 значениями температуры T, T1 и T2 соответственно, где значения T1 и T2 являются значениями температуры, измеренными относительно предыдущих изображений и сохраненными соответственно в операциях 405 и 408 по Фиг.4.
, и является ли абсолютная разность между и выше порога . Если любая из этих разностей меньше порогового значения, способ, например, возвращается к операции 505. Если, однако, было существенное изменение температуры (изменение ) с момента вычисления значений коррекции усиления и смещения, следующей операцией является 506. Как замечено выше, вместо использования масштабного коэффициента в качестве показания температуры, значение T температуры может быть получено посредством датчика температуры. В таком случае, значения , и будут заменены в операции 504 по Фиг.5 значениями температуры T, T1 и T2 соответственно, где значения T1 и T2 являются значениями температуры, измеренными относительно предыдущих изображений и сохраненными соответственно в операциях 405 и 408 по Фиг.4.
В операции 506, значения коррекции усиления и смещения для пикселя используются в качестве испытательного значения для корректировки значения пикселя, полученного в операции 501 для захваченного изображения, например, путем применения уравнений 1, 2 и 3 выше, со значениями усиления и смещения, модифицированными как в уравнении 5.
В операции 507 затем определяют, является ли модифицированное значение пикселя все еще выбросом, другими словами, идентифицируют ли его все еще как паразитный пиксель. Например, прием, применяемый в операции 301 к обнаруженным паразитным пикселям, применяется к изображению со скорректированным пикселем .
Если это не выброс, значения коррекции считаются подлежащими проверке, поскольку на этапе 504 температура фокальной плоскости оказалась достаточно далекой от ее двух предыдущих значений, и несмотря на такое изменение температуры значение пикселя не является выбросом. Таким образом, в следующей операции 508, новые значения смещения и усиления, скорректированные с использованием значений  и коррекции, например, сохраняются в таблицах 208, 210 смещения и усиления, и затем в операции 509 их удаляют из списка паразитных пикселей.
и коррекции, например, сохраняются в таблицах 208, 210 смещения и усиления, и затем в операции 509 их удаляют из списка паразитных пикселей.
Если, однако, пиксель все еще являет собой выброс, то, например, полагают, что пиксель не может быть скорректирован поправками к значениям усиления и смещения. Пиксель, следовательно, например, добавляют к списку плохих пикселей в операции 510 и затем выполняют операцию 509, чтобы удалить пиксель из списка .
Пример способа для обнаружения паразитных пикселей, реализованный в операции 301 по Фиг.3, теперь будет описан более подробно со ссылкой на фигуры Фиг. 6, 7 и 8.
Фиг.6 является структурной схемой, иллюстрирующей пример операций в способе обнаружения паразитных пикселей в захваченном изображении. Способ, например, реализуется посредством устройства 112 захвата изображений по Фиг.2, и захваченное изображение, например, было скорректировано путем применения значений 208, 210 смещения и усиления.
В операции 601, вычисляют оценочный показатель для каждого пикселя входного изображения на основе расстояния в терминах значений пикселей, вычисленных по отношению к соседним связанным пикселям.
В операции 602, выбросы, например, идентифицируют путем сравнения вычисленных оценочных показателей с первым порогом. Этот этап, например, используется для выбора только подмножества пикселей в качестве потенциальных паразитных пикселей. В некоторых вариантах осуществления этот этап, однако, может быть опущен.
В операции 603, паразитные пиксели, например, идентифицируют на основе выбросов, идентифицированных в операции 602 (или из целого изображения в случае, если операция 602 опущена).
Фигура 7 является структурной схемой, иллюстрирующей пример операций для реализации операции 601 по Фиг.6 для формирования оценочных показателей. Этот способ, например, применяется к каждому пикселю изображения поочередно, например, в порядке растровой развертки, хотя пиксели могут обрабатываться в любом порядке. Операции этого способа будут обсуждаться со ссылкой на Фиг.8A.
Фигура 8A иллюстрирует девять видов 801-809 окна 5×5 пикселей, представляющих примерное применение способа по Фиг.7. Более обобщенно, размер окна может задаваться как  , где является нечетным целым числом, равным по меньшей мере 3, и, например, равным по меньшей мере 5. В некоторых вариантах осуществления равно или меньше чем 15. Окно находится вокруг целевого пикселя, для которого должен генерироваться оценочный показатель, другими словами, целевой пиксель, например, является центральным пикселем окна.
, где является нечетным целым числом, равным по меньшей мере 3, и, например, равным по меньшей мере 5. В некоторых вариантах осуществления равно или меньше чем 15. Окно находится вокруг целевого пикселя, для которого должен генерироваться оценочный показатель, другими словами, целевой пиксель, например, является центральным пикселем окна.
Обращаясь снова на Фиг.7, в операции 701 генерируется список связанных соседей пикселя. Связанные соседи являются любыми пикселями, совместно использующими граничную или угловую точку с пикселем, который уже был выбран. Таким образом, для пикселя, который не находится на крае изображения, будет восемь связанных соседей. Первоначально, выбирают только пиксель, для которого должен быть сгенерирован оценочный показатель. Этот пиксель будет именоваться здесь целевым пикселем. Например, как представлено видом 801 по Фиг.8A, оценочный показатель подлежит вычислению для центрального пикселя, затушеванного на фигуре, имеющего значение пикселя 120. Как представлено видом 802, связанными соседями являются восемь пикселей, окружающих центральный пиксель 120.
В операции 702, из числа связанных соседей выбирают пиксель, имеющий значение пикселя с наименьшим расстоянием от значения пикселя до целевого пикселя. Например, расстояние  между значениями пикселей
между значениями пикселей  и
и  определяется как
определяется как  . Как представлено видом 803 на Фиг.8A, выбирается пиксель, имеющий значение 120, равное значению целевого пикселя.
. Как представлено видом 803 на Фиг.8A, выбирается пиксель, имеющий значение 120, равное значению целевого пикселя.
В операции 703, сосед, выбранный в операции 702, удаляется из списка связанных соседей целевого пикселя, и добавляются новые связанные соседи, которые содержат связанных соседей заново выбранного соседа, идентифицированного в операции 702. Например, как представлено видом 804 на Фиг.8A, три новых пикселя, связанных с заново выбранным пикселем, добавляются к списку.
В операции 704, определяют, были ли выбраны связанных соседа. Число соседей, подлежащих рассмотрению, является, например, фиксированным параметром, который выбирают на основе наивысшего ожидаемого числа связанных паразитных пикселей. Например, для некоторых датчиков изображения может считаться, что паразитные пиксели всегда изолированы друг от друга. В таком случае, может выбираться являющимся равным непосредственно 2. Альтернативно, если считается возможным, что для данного датчика изображения могут быть идентифицированы два связанных паразитных пикселя, например, выбирают более высокое значение , например, равное значению между 3 и 5. В примере по Фиг.8A, равно 4. Если еще не были выбраны соседей, способ возвращается к операции 702, в которой снова выбирают нового связанного соседа. Операции 703 и 704 затем повторяются, пока не будут выбраны соседей, и затем выполняется операция 705. Как представлено в видах 805-809 по Фиг.8A, выбирают блок из четырех соседей целевого пикселя.
Фигура 8B иллюстрирует виды окна × пикселей, и демонстрирует разность между вычислением расстояния на основе просто ближайших соседей в окне, и таковым на основе ближайших связанных соседей. Как представлено видом 810, центральный пиксель являет собой выброс, поскольку разность между его значением и его окружающей окрестностью является высокой.
Вид 811 представляет четырех выбранных соседей в окне, имеющих значения, ближайшие к центральному пикселю, и не связанные с ним. Это вычисление приведет к низкому оценочному показателю, указывающему, что пиксель не является выбросом.
Вид 812 представляет четырех выбранных связанных соседей. В этом случае, выбраны четыре полностью различных пикселя, и оценочные показатели четко указывает, что целевой пиксель является выбросом.
Обращаясь снова на Фиг. 7, в операции 705, оценочный показатель для целевого пикселя вычисляют на основе выбранных связанных соседей. Например, оценочный показатель  для целевого пикселя вычисляют на основе следующего уравнения:
для целевого пикселя вычисляют на основе следующего уравнения:
 (9)
(9)
где wi является весом, связанным с пикселем, и  -
-  являются выбранными связанными соседями.
являются выбранными связанными соседями.
Вес wi для пикселя , например, определяют, используя следующее уравнение:
 (10)
(10)
где  является массивом локальных стандартных отклонений, вычисленных для пикселей в окне × пикселя , отсортированный в упорядоченности по возрастанию, и
является массивом локальных стандартных отклонений, вычисленных для пикселей в окне × пикселя , отсортированный в упорядоченности по возрастанию, и  является параметром, например, установленным в очень низкое значение, такое как 0,0001. Таким образом, вес основывается на стандартных отклонениях поддиапазона пикселей в окне ×, поддиапазон выбирается как пиксели между и (
является параметром, например, установленным в очень низкое значение, такое как 0,0001. Таким образом, вес основывается на стандартных отклонениях поддиапазона пикселей в окне ×, поддиапазон выбирается как пиксели между и ( -) на основе ранжированных стандартных отклонений пикселей. В альтернативных вариантах осуществления вес может вычисляться на основе стандартного отклонения для другого подмножества пикселей.
-) на основе ранжированных стандартных отклонений пикселей. В альтернативных вариантах осуществления вес может вычисляться на основе стандартного отклонения для другого подмножества пикселей.
В альтернативных вариантах осуществления другой вес может применяться к оценочным показателям, или вес может не применяться к оценочным показателям. Преимущество применения веса на основе локального стандартного отклонения пикселя состоит в том, что может учитываться текстура в зоне пикселя, более высокое взвешивание дается оценочным показателям пикселей в гладких зонах, и более низкое взвешивание - оценочным показателям пикселей в текстурированных зонах, где может ожидаться относительно высокое отклонение.
Фигура 8C иллюстрирует виды 813, 814 двух различных окон × пикселей и демонстрирует преимущество применения к пикселям весового коэффициента на основе локального стандартного отклонения. Оценочный показатель целевого пикселя в обоих видах будет тем же. Однако на виде 813 имеется край, проходящий через целевой пиксель, и таким образом пиксель не следует рассматривать выбросом. На виде 814 изображение является относительно гладким в области целевого пикселя, и целевой пиксель следует рассматривать выбросом. Вес wi, вычисленный для вида 814 на основе локального стандартного отклонения, будет выше веса, вычисленного для вида 813.
Обращаясь снова к способу по Фиг.6, операция 602, например, включает в себя определение порогового оценочного показателя на основе распределения вероятностей для ожидаемых оценочных показателей в изображении. Изобретатели по настоящей заявке установили, что распределение Лапласа особенно хорошо подходит к большинству сцен инфракрасного изображения.
Известно, что если  , то
, то  является экспоненциальным распределением. Функция плотности вероятности
является экспоненциальным распределением. Функция плотности вероятности  , при
, при  , следовательно, имеет вид , где
, следовательно, имеет вид , где  . Ее функцией распределения является
. Ее функцией распределения является  . Параметр
. Параметр  экспоненты может быть оценен путем оценивания среднего на основе среднего значения выборки и взятия инверсии этого среднего:
экспоненты может быть оценен путем оценивания среднего на основе среднего значения выборки и взятия инверсии этого среднего:
 (11)
(11)
где  является числом пикселей в изображении.
является числом пикселей в изображении.
Обращаясь к порогу , этот порог, например, вычисляют на основе , используя следующее уравнение:
 (12)
(12)
Вместо вычисления порога с использованием этого уравнения, альтернативой будет просто выбор порога, который отфильтровывает некоторую процентную долю оценочных показателей, такую как 95 процентов показателей. Однако, преимущество фильтрации с использованием порога, описанного выше, на основе распределения Лапласа состоит в том, что это устраняет проблемы, вводимые шумом. Действительно, если выбирают фиксированную процентную долю оценочных показателей, то число выбранных пикселей будет одинаковым для того же изображения с шумом и без него. Однако, порог, определенный на основе распределения Лапласа, будет изменяться на основе уровня шума в изображении.
Операция 603 по Фиг.6, например, включает в себя идентификацию паразитных пикселей из числа выбросов, идентифицированных в операции 602. Это, например, достигают путем выбора оценочных показателей выше порогового уровня, вычисленного на основе оценочных показателей для выбросов. Порог , например, определяют, используя следующее уравнение:
(13)
где является параметром, например, выбираемым, чтобы находился между 1,0 и 5,0, и, например, равным 1,5, и и являются первым и третьим квартилями для выбросов, идентифицированных в операции 602, соответственно.
В некоторых вариантах осуществления, чтобы избежать паразитных уведомлений, пиксель рассматривают как паразитный пиксель, только если его оценочный показатель превышает порог , и его оценочный показатель выше минимального порога  , равного фиксированному значению.
, равного фиксированному значению.
Преимущество вариантов осуществления, описанных здесь, состоит в том, что паразитные пиксели могут быть обнаружены с использованием относительно простого и эффективного способа. Кроме того, способ выполнения коррекции паразитных пикселей означает, что вместо того, чтобы классифицироваться как плохие пиксели, значения пикселей, несущих информацию сцены, из некоторых пикселей можно продолжать использовать, чтобы генерировать пиксели изображения.
С наличием таким образом описанного по меньшей мере одного иллюстративного исполнения, различные изменения, модификации и совершенствования легко придут на ум специалистам в данной области техники.
Например, хотя конкретный пример микроболометра описан в отношении фигур Фиг.1 и 2, специалистам в данной области техники будет очевидно, что способы, описанные здесь, могут применяться к различным другим реализациям микроболометра или к другим типам устройств захвата ИК изображений.
Кроме того, специалистам в данной области техники будет очевидно, что различные операции, описанные в отношении различных вариантов осуществления, в альтернативных вариантах осуществления могут выполняться в других порядках следования без влияния на их эффективность.
Изобретение относится к способу обнаружения паразитных пикселей в матрице пикселей устройства захвата изображений, чувствительной к инфракрасному излучению. Технический результат заключается в эффективном обнаружении плохих пикселей. Способ содержит: прием входного изображения; вычисление оценочного показателя для совокупности целевых пикселей, содержащей некоторые пиксели из пикселей входного изображения, причем оценочный показатель для каждого целевого пикселя генерируют на основе  пикселей входного изображения, выбранных в окне
пикселей входного изображения, выбранных в окне  × пикселей вокруг целевого пикселя; и обнаружение того, что по меньшей мере один пиксель из целевых пикселей является паразитным пикселем, на основе вычисленных оценочных показателей. 3 н. и 12 з.п, 8 ил.
× пикселей вокруг целевого пикселя; и обнаружение того, что по меньшей мере один пиксель из целевых пикселей является паразитным пикселем, на основе вычисленных оценочных показателей. 3 н. и 12 з.п, 8 ил.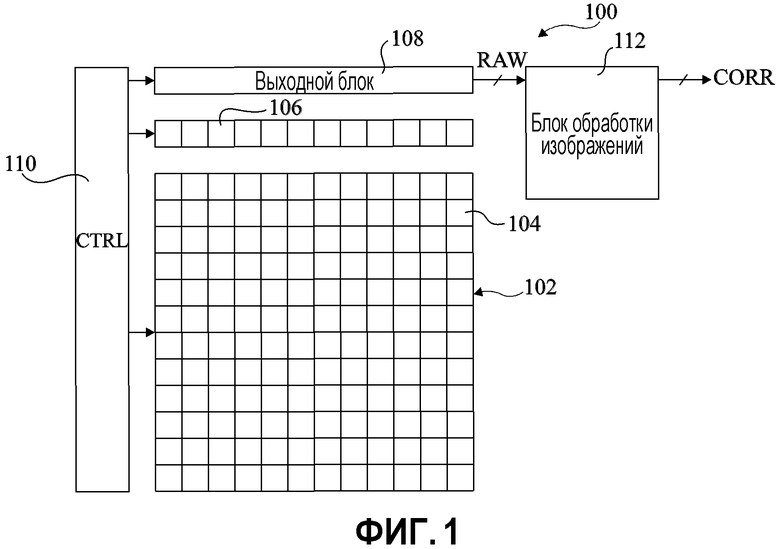
1. Способ обнаружения паразитных пикселей чувствительной к инфракрасному излучению матрицы пикселей устройства захвата изображений, содержащий:
прием устройством обработки в устройстве захвата изображений входного изображения, захваченного матрицей пикселей;
вычисление оценочного показателя для множества целевых пикселей, содержащего по меньшей мере некоторые из пикселей входного изображения, причем оценочный показатель для каждого целевого пикселя генерируют на основе  пикселей входного изображения, выбранных в окне
пикселей входного изображения, выбранных в окне  × пикселей вокруг целевого пикселя, является нечетным целым числом 3 или более, и является целым числом между 2 и 5, каждый из пикселей совокупности, формируемой k пикселями и целевым пикселем, совместно использует по меньшей мере одну границу или угол с другим пикселем упомянутой совокупности, и значения k пикселей находятся на соответственных расстояниях от значения целевого пикселя, k пикселей выбирают на основе расстояний k пикселей, а оценочный показатель для каждого целевого пикселя вычисляют на основе расстояний k выбранных пикселей; и
× пикселей вокруг целевого пикселя, является нечетным целым числом 3 или более, и является целым числом между 2 и 5, каждый из пикселей совокупности, формируемой k пикселями и целевым пикселем, совместно использует по меньшей мере одну границу или угол с другим пикселем упомянутой совокупности, и значения k пикселей находятся на соответственных расстояниях от значения целевого пикселя, k пикселей выбирают на основе расстояний k пикселей, а оценочный показатель для каждого целевого пикселя вычисляют на основе расстояний k выбранных пикселей; и
обнаружение того, что по меньшей мере один из целевых пикселей является паразитным пикселем, на основе вычисленных оценочных показателей.
2. Способ по п. 1, в котором H является нечетным целым числом, равным 5 или более.
3. Способ по п. 1, в котором выбор k пикселей содержит последовательные этапы, на которых:
формируют вокруг целевого пикселя первую группу, состоящую из всех пикселей, совместно использующих по меньшей мере одну границу или угол с целевым пикселем, за исключением целевого пикселя, и выбирают в рамках этой первой группы первый пиксель, имеющий значение, которое является ближайшим к значению целевого пикселя;
формируют вторую группу, состоящую из первой группы, за исключением первого выбранного пикселя, и из всех пикселей, совместно использующих по меньшей мере одну границу или угол с первым выбранным пикселем, и выбирают в рамках этой второй группы второй пиксель, имеющий значение, которое является ближайшим к значению целевого пикселя; и
повторяют операции расширения группы отбора и затем выбирают каждый последующий пиксель в каждой новой расширенной группе соответственно, имеющий значение, ближайшее к значению целевого пикселя, до тех пор, пока не будет выбрано k пикселей.
4. Способ по любому из пп. 1-3, в котором k пикселей выбирают таким образом, чтобы минимизировать сумму k расстояний.
5. Способ по любому из пп. 1-3, в котором оценочный показатель равен сумме k расстояний.
6. Способ по любому из пп. 1-3, в котором обнаружение упомянутого по меньшей мере одного паразитного пикселя содержит сравнение по меньшей мере некоторых из оценочных показателей с пороговым значением.
7. Способ по п. 6, в котором сравнение по меньшей мере некоторых из оценочных показателей с пороговым значением включает в себя сравнение подмножества оценочных показателей с пороговым значением, причем подмножество содержит множество наивысших оценочных показателей, и при этом пороговое значение вычисляют на основе следующего уравнения:

где  является параметром, равным по меньшей мере 1,0, и
является параметром, равным по меньшей мере 1,0, и  и
и  являются соответственно первым и третьим квартилями подмножества.
являются соответственно первым и третьим квартилями подмножества.
8. Способ по п. 7, в котором упомянутые по меньшей мере некоторые оценочные показатели выбирают, применяя дополнительный порог к вычисленным оценочным показателям.
9. Способ по п. 8, в котором упомянутый дополнительный порог вычисляют на основе допущения, что значения пикселей в изображении имеют распределение вероятностей на основе распределения Лапласа.
10. Способ по п. 8 или 9, в котором упомянутый дополнительный порог вычисляют на основе следующего уравнения:

где  является оценкой параметра экспоненциального распределения
является оценкой параметра экспоненциального распределения  , соответствующего абсолютному значению (
, соответствующего абсолютному значению ( ) вычисленных оценочных показателей.
) вычисленных оценочных показателей.
11. Способ по любому из пп. 1-3, дополнительно содержащий, до вычисления упомянутых оценочных показателей, коррекцию первого входного изображения путем применения значений усиления и смещения к по меньшей мере некоторым из значений пикселей первого входного изображения.
12. Читаемый компьютером носитель, хранящий команды для выполнения способа по любому из пп. 1-11 при исполнении устройством обработки.
13. Устройство обработки изображений, содержащее:
память, хранящую входное изображение; и
устройство обработки, выполненное с возможностью:
принимать входное изображение, захваченное матрицей пикселей;
вычислять оценочный показатель для множества целевых пикселей, содержащего по меньшей мере некоторые из пикселей входного изображения, причем оценочный показатель для каждого целевого пикселя генерируют на основе пикселей входного изображения, выбранных в окне × пикселей вокруг целевого пикселя, H является нечетным целым числом 3 или более, и является целым числом между 2 и 5, каждый из пикселей совокупности, образуемой k пикселями и целевым пикселем, совместно использует по меньшей мере одну границу или угол с другим пикселем упомянутой совокупности, и значения k пикселей находятся на соответственных расстояниях от значения целевого пикселя, k пикселей выбирают на основе расстояний k пикселей, а оценочный показатель для каждого целевого пикселя вычисляют на основе расстояний k выбранных пикселей; и
обнаруживать, что по меньшей мере один из целевых пикселей является паразитным пикселем, на основе вычисленных оценочных показателей.
14. Устройство по п. 13, в котором k пикселей выбирают таким образом, чтобы минимизировать сумму k расстояний.
15. Устройство по п. 13 или 14, в котором оценочный показатель равен сумме k расстояний.
| US 2011090371 A1, 21.04.2011 | |||
| EP 0651566 A1, 03.05.1995 | |||
| Зажим для конца каната | 1986 |
|
SU1401196A1 |
| US 2006007331 A1, 12.01.2006. | |||

