ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение имеет отношение к датчику изображения и устройству захвата изображения.
УРОВЕНЬ ТЕХНИКИ
В последние годы были произведены усовершенствования высокофункциональных и многофункциональных устройств захвата изображения, которые используют датчик изображения CMOS или тому подобное, для поддержки разнообразных потребностей. Для датчиков изображения CMOS были произведены увеличение количества пикселей и усовершенствования высокоскоростного формирования изображения, и возрастает востребованность способов, которые позволяют быстрее считывать сигналы пикселей.
Например, способ для выполнения высокоскоростного считывания, который широко использовался в последние годы, предусматривает размещение схемы аналого-цифрового преобразования (в дальнейшем, АЦП столбца) для каждого столбца и выполнение цифрового вывода, как раскрыто в выложенном патенте Японии № 2005-278135. Благодаря внедрению АЦП столбцов становится возможным выполнять цифровую передачу сигналов пикселей за пределы датчика изображения, а высокоскоростное считывание стало возможным в результате технических улучшений в передаче цифрового сигнала.
С другой стороны, в качестве примера множественной функционализации, было предложено устройство захвата изображения, способное, например, собирать не только данные о распределении интенсивности света, но также и информацию о направлении падения света и расстоянии от источника света. Патент Японии № 3774597 раскрывает датчик изображения, способный обнаруживать фокус с использованием сигналов полученных от датчика изображения. Датчик изображения имеет конфигурацию, в которой фотодиод (в дальнейшем, ФД), соответствующий одной микролинзе, разделяется на два, так что каждый ФД принимает свет от разных поверхностей зрачка приемной линзы. Обнаружение фокуса выполняется путем сравнения выходов этих двух ФД. Нормальное захваченное изображение также может быть получено путем суммирования выходных сигналов от двух ФД, из которых состоит единичный пиксель.
Устройство захвата изображения, раскрытое в выложенном патенте Японии № 2009-89105, обеспечивается режимом для считывания сигналов обнаружения фокуса, сигналов управления экспозицией и сигналов захвата изображения для отображения представления в реальном времени от твердотельного датчика изображения при одном вертикальном сканировании одного и того же кадра. Устройство захвата изображения, раскрытое в выложенном патенте Японии № 2009-89105, описано как способное выполнять отображение представления в реальном времени с более быстрым управлением обнаружением фокуса и управлением экспозицией.
Однако, поскольку сигналы всех ФД должны считываться в случае выполнения управления обнаружением фокуса и экспозиции в датчике изображения, таком как раскрытый в патенте Японии № 3774597 и выложенном патенте Японии № 2009-89105, существует проблема в том, что увеличивается время, необходимое для считывания сигналов ФД, и снижается частота кадров. Даже если время считывания сигнала уменьшается за счет способа считывания с использованием АЦП столбцов, такого как в Патентном Документе 1, в будущем ожидается дальнейшее увеличение количества пикселов и частоты кадров, и, следовательно, требуется дополнительное сокращение времени считывания сигнала.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение было создано с учетом вышеупомянутых проблем и предоставляет датчик изображения, который может значительно сократить время, затрачиваемое для того, чтобы вывести от датчика изображения сигналы, необходимые для управления приводом устройства захвата изображения, такие как сигналы обнаружения фокуса.
В соответствии с первым аспектом настоящего изобретения предоставляется датчик изображения, содержащий: пиксельный блок, в котором множество единичных пикселей, каждый из которых имеет одну микролинзу и множество блоков фотоэлектрического преобразования, составляет матрицу; блок хранения сигналов, выполненный с возможностью хранения сигналов, выводимых от единичных пикселей всей области пиксельного блока; устройство обработки сигналов, выполненное с возможностью обработки сигналов, хранящихся в блоке хранения сигналов, и имеющее устройство обработки сигналов захвата изображения, выполненное с возможностью выполнения обработки сигналов для генерирования захваченного изображения по сигналам, хранящимся в блоке хранения сигналов, и устройство обработки сигналов обнаружения фокуса, выполненное с возможностью выполнения обработки сигналов для обнаружения фокуса по сигналам, хранящимся в блоке хранения сигналов; и блок вывода, выполненный с возможностью вывода сигналов, обработанных устройством обработки сигналов.
В соответствии со вторым аспектом настоящего изобретения предоставляется устройство захвата изображения, содержащее: датчик изображения; устройство обработки изображений, выполненное с возможностью обработки сигналов, выводимых от датчика изображения, и генерирования изображения; и устройство обнаружения фокуса, выполненное с возможностью обработки сигналов считывания и выполнения обнаружения фокуса, при этом датчик изображения включает в себя: пиксельный блок, в котором множество единичных пикселей, каждый из которых имеет одну микролинзу и множество блоков фотоэлектрического преобразования, составляет матрицу; блок хранения сигналов, выполненный с возможностью хранения сигналов, выводимых от единичных пикселей всей области пиксельного блока; устройство обработки сигналов, выполненное с возможностью обработки сигналов, хранящихся в блоке хранения сигналов, и имеющее устройство обработки сигналов захвата изображения, выполненное с возможностью выполнения обработки сигналов для генерирования захваченного изображения по сигналам, хранящимся в блоке хранения сигналов, и устройство обработки сигналов обнаружения фокуса, выполненное с возможностью выполнения обработки сигналов для обнаружения фокуса по сигналам, хранящимся в блоке хранения сигналов; и блок вывода, выполненный с возможностью вывода сигналов, обработанных устройством обработки сигналов.
В соответствии с третьим аспектом настоящего изобретения предоставляется датчик изображения, содержащий: пиксельный блок, в котором размещается множество пикселей, выполненных с возможностью фотоэлектрического преобразования света от объекта; блок считывания, выполненный с возможностью считывания сигналов от пиксельного блока; и блок вывода, выполненный с возможностью вывода, из числа сигналов, считанных блоком считывания, сигналов пикселей всей области пиксельного блока за пределы датчика изображения, в качестве сигналов для генерирования изображения, и сигналов пикселей частичной области пиксельного блока за пределы датчика изображения, в качестве сигналов для вычисления оценочного значения, которое будет использоваться при управлении приводом устройства, которое включает в себя датчик изображения.
В соответствии с четвертым аспектом настоящего изобретения предоставляется датчик изображения, содержащий: пиксельный блок, в котором размещается множество пикселей, выполненных с возможностью фотоэлектрического преобразования света от объекта; блок считывания, выполненный с возможностью считывания сигналов от пиксельного блока; блок обнаружения разности фаз, выполненный с возможностью вычисления оценочного значения разности фаз, которое будет использоваться при управлении обнаружением фокуса с применением способа обнаружения разности фаз; и блок вывода, выполненный с возможностью вывода, из числа сигналов, считанных блоком считывания, сигналов пикселей всей области пиксельного блока за пределы датчика изображения, в качестве сигналов для генерирования изображения, и оценочного значения разности фаз, вычисленного блоком обнаружения разности фаз с использованием сигналов пикселей частичной области пиксельного блока, за пределы датчика изображения.
В соответствии с пятым аспектом настоящего изобретения предоставляется устройство захвата изображения, содержащее: датчик изображения, включающий в себя: пиксельный блок, в котором размещается множество пикселей, выполненных с возможностью фотоэлектрического преобразования света от объекта; блок считывания, выполненный с возможностью считывания сигналов от пиксельного блока; и блок вывода, выполненный с возможностью вывода, из числа сигналов, считанных блоком считывания, сигналов пикселей всей области пиксельного блока за пределы датчика изображения, в качестве сигналов для генерирования изображения, и сигналов пикселей частичной области пиксельного блока за пределы датчика изображения, в качестве сигналов для вычисления оценочного значения, которое будет использоваться при управлении приводом устройства, которое включает в себя датчик изображения; и устройство выбора, выполненное с возможностью выбора частичной области.
Дополнительные признаки настоящего изобретения станут очевидными из последующего описания иллюстративных вариантов осуществления со ссылкой на прилагаемые чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 является структурной схемой, показывающей конфигурацию устройства захвата изображения в соответствии с первым вариантом осуществления настоящего изобретения.
Фиг. 2 является схематическим изображением, иллюстрирующим конфигурацию единичных пикселей датчика изображения согласно первому варианту осуществления.
Фиг. 3 является концептуальным представлением, в котором световые пучки, испускаемые через выходной зрачок приемной линзы, падают на единичный пиксель.
Фиг. 4 является структурной схемой, показывающей конфигурацию датчика изображения согласно первому варианту осуществления.
Фиг. 5 является схематическим изображением, иллюстрирующим схему пикселя и схему считывания датчика изображения согласно первому варианту осуществления.
Фиг. 6 является временной диаграммой, показывающей операцию считывания сигнала датчика изображения согласно первому варианту осуществления.
Фиг. 7 является схематическим изображением, иллюстрирующим конфигурацию устройства обработки сигналов в датчике изображения согласно первому варианту осуществления.
Фиг. 8A является схематическим изображением, показывающим области вывода сигнала обнаружения фокуса в области пикселей согласно второму варианту осуществления.
Фиг. 8B является схематическим изображением, показывающим области вывода сигнала обнаружения фокуса в области пикселей согласно второму варианту осуществления.
Фиг. 9 является структурной схемой, показывающей конфигурацию устройства захвата изображения в соответствии с третьим вариантом осуществления настоящего изобретения.
Фиг. 10 является блок-схемой последовательности операций, показывающей поток обработки для АФ по разности фаз плоскости захвата изображения в третьем варианте осуществления.
Фиг. 11 является схематическим изображением, показывающим экран для выбора области обнаружения фокуса в третьем варианте осуществления.
Фиг. 12A является схематическим изображением, показывающим экран результата обнаружения объекта в третьем варианте осуществления.
Фиг. 12B является схематическим изображением, показывающим экран результата обнаружения объекта в третьем варианте осуществления.
Фиг. 13 является схематическим изображением, иллюстрирующим конфигурацию датчика изображения согласно четвертому варианту осуществления.
Фиг. 14 является схематическим изображением, иллюстрирующим схему пикселя и схему считывания датчика изображения согласно четвертому варианту осуществления.
Фиг. 15 является схематическим изображением общей конфигурации датчика изображения согласно пятому варианту осуществления.
Фиг. 16 является схематическим изображением общей конфигурации датчика изображения согласно пятому варианту осуществления.
Фиг. 17 является схематическим изображением общей конфигурации датчика изображения согласно шестому варианту осуществления.
Фиг. 18 является структурной схемой, показывающей конфигурацию устройства захвата изображения в соответствии с седьмым вариантом осуществления.
Фиг. 19 является структурной схемой, показывающей конфигурацию устройства захвата изображения в соответствии с восьмым вариантом осуществления.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
В дальнейшем в этом документе будут подробно описаны варианты осуществления настоящего изобретения со ссылкой на сопровождающие чертежи.
Первый Вариант Осуществления
Фиг. 1 является структурной схемой, показывающей конфигурацию устройства захвата изображения, имеющего датчик изображения, согласно первому варианту осуществления настоящего изобретения. Датчик 100 изображения выполняется с возможностью быть снабженным блоком 102 приема света, блоком 103 считывания, управляющим устройством 104, устройством 105 обработки сигналов и блоком 106 вывода. Блок 102 приема света имеет множество единичных пикселей, которые размещены в матрице, и принимает свет оптического изображения, сформированного приемной линзой 101. Конфигурация блока 102 приема света будет рассмотрена ниже. Блок 103 считывания (блок А/Ц преобразования), при поступлении управляющего сигнала привода от управляющего устройства 104, осуществляет А/Ц преобразование сигналов изображения, которые выводятся от блока 102 приема света, и отправляет прошедшие А/Ц преобразование сигналы изображения в устройство 105 обработки сигналов.
Устройство 105 обработки сигналов выполняет обработку вычислительных операций, таких как сложение, вычитание и умножение сигналов, обработку для выбора сигналов, подлежащих выводу вовне из датчика 100 изображения через блок 106 вывода, и тому подобное, над прошедшими А/Ц преобразование сигналами изображения. Кроме того, устройство 105 обработки сигналов выполняет обработку, включающую в себя различные типы коррекции, такие как регулирование опорного уровня и тому подобное, и перегруппировка данных. Эта обработка выполняется при поступлении управляющего сигнала от управляющего устройства 104. Устройство 105 обработки сигналов, которое будет подробно рассмотрено ниже, выполняет обработку сигнала захвата изображения и обработку сигнала обнаружения фокуса на сигналах изображения, полученных из блока 102 приема света, и отправляет обработанные сигналы изображения в блок 106 вывода. Блок 106 вывода выводит сигналы изображения, обработанные устройством 105 обработки сигналов, за пределы датчика 100 изображения.
Устройство 107 обработки изображений принимает сигналы захвата изображения от блока 106 вывода датчика 100 изображения, выполняет обработку изображения, такую как коррекция дефектных пикселей, подавление шума, преобразование цветов, коррекция баланса белого и коррекция изображения, обработка преобразования разрешения и обработка сжатия изображения, и генерирует неподвижные изображения или движущиеся изображения. Блок 108 обнаружения разности фаз, при поступлении сигнала обнаружения фокуса от блока 106 вывода, вычисляет оценочное значение разности фаз для выполнения обнаружения фокуса.
Общий управляющий/операционный модуль 109 выполняет общее перемещение и управление датчика 100 изображения и всего устройства захвата изображения. Модуль 110 отображения отображает мгновенные изображения, изображения в реальном времени, различные экраны настройки, и т.п. Модуль 111 записи и модуль 112 памяти являются носителями записи, такими как энергонезависимая память или карта памяти, которые записывают и хранят сигналы изображения, выводимые из общего управляющего/операционного модуля 109, и т.п. Операционный модуль 113 принимает команды от пользователя, используя операционный элемент, предусмотренный для устройства захвата изображения, и вводит команды в общий управляющий/операционный модуль 109. Управляющее устройство 114 линзы вычисляет информацию о перемещении оптической системы на основании оценочного значения разности фаз, вычисленного блоком 108 обнаружения разности фаз, и управляет положением фокусной линзы приемной линзы 101.
Далее будут описаны взаимосвязь между приемной линзой 101 в устройстве захвата изображения согласно настоящему варианту осуществления и блок 102 приема света датчика 100 изображения, разрешающая способность пикселя, а также принципы обнаружения фокуса с использованием способа разделения зрачка.
Фиг. 2 является схематическим представлением, показывающим конфигурацию единичных пикселей 200 датчика 100 изображения. На Фиг. 2, микролинза 202 дополнительно фокусирует свет, формирующий изображение на датчике 100 изображения посредством приемной линзы 101, по каждому пикселю. Блоки 201А и 201B фотоэлектрического преобразования, состоящие из фотодиодов (ФД), принимают свет, падающий на единичный пиксель 200, а также генерируют и накапливают сигнальный заряд, который зависит от количества принимаемого света. В силу того, что единичный пиксель 200 имеет два блока фотоэлектрического преобразования под одной микролинзой 202, каждый из этих двух блоков 201А и 201B фотоэлектрического преобразования может принимать свет, который прошел через область выходного зрачка, разделенную на две части. Сигнал, полученный путем объединения двух сигналов блоков 201А и 201B фотоэлектрического преобразования, по каждому пикселю, является выходным сигналом одного пикселя, служащего в качестве пикселя генерирования изображения. Кроме того, обнаружение фокуса приемной линзы 101 может быть выполнено путем сравнения сигналов, которые получены от двух блоков фотоэлектрического преобразования, по каждому пикселю. А именно, обнаружение фокуса с применением способа обнаружения разности фаз, в соответствии с которым зрачок разделяется в направлении левый-правый, возможно в результате выполнения операции корреляции на сигнале, который получен из блока 201А фотоэлектрического преобразования, и сигнала, который получен из блока 201B фотоэлектрического преобразования, в некоторой области в пределах единичного пикселя 200.
Фиг. 3 является схематическим изображением, в котором свет, прошедший через приемную линзу 101, проходит через одну микролинзу 202 и принимается единичным пикселем 200 блока 102 приема света датчика 100 изображения как наблюдающийся с направления, перпендикулярного (направление оси Y) к оптической оси (оси Z). Свет, прошедший через выходные зрачки 302 и 303 приемной линзы, падает на единичный пиксель 200 так, чтобы центрироваться по оптической оси. В это время количество падающего света регулируется диафрагмой 301 линзы. Как показано на Фиг. 3, световой пучок, который проходит через область 302 зрачка, проходит через микролинзу 202 и принимается блоком 201А фотоэлектрического преобразования, а световой пучок, который проходит через область 303 зрачка, проходит через микролинзу 202, и принимается блоком 201B фотоэлектрического преобразования. Соответственно, каждый из блоков 201А и 201B фотоэлектрического преобразования принимает свет из разных областей выходного зрачка приемной линзы.
Сигнал блока 201А фотоэлектрического преобразования, который разделяет в зрачке свет от приемной линзы 101, собирается от множества единичных пикселей 200, расположенных рядом друг с другом в направлении оси X, и изображение объекта, составленное этой группой выходных сигналов, задается как изображение A. Сигнал блока 201B фотоэлектрического преобразования, который так же разделяет в зрачке свет от приемной линзы 101, собирается от множества единичных пикселей 200, расположенных рядом друг с другом в направлении оси X, и изображение объекта, составленное этой группой выходных сигналов, задается как изображение B.
Реализуется операция корреляции на изображении A и изображении B, и обнаруживается величина сдвига изображения (разность фаз из-за разделения зрачка). Дополнительно, посредством умножения величины сдвига изображения на коэффициент преобразования, который определяется исходя из оптической системы и фокусного положения приемной линзы 101, при этом фокусное положение, соответствующее произвольному положению объекта на экране, может быть вычислено. Посредством управления фокусным положением приемной линзы 101 на основании вычисленной в данной ситуации информации о фокусном положении, становится возможной АФ (автофокусировка) по разности фаз плоскости захвата изображения. Кроме того, при подаче сигнала, полученного посредством суммирования сигнала изображения A и сигнала изображения B, в качестве сигнала изображения A+B, этот сигнал изображения A+B может использоваться как нормальное мгновенное изображение.
Далее будут описаны конфигурации блока 102 приема света и блока 103 считывания датчика 100 изображения, с использованием Фиг. 4 и 5. Фиг. 4 является структурной схемой, показывающей иллюстративную конфигурацию блока 102 приема света и блока 103 считывания датчика 100 изображения. Блок 102 приема света имеет пиксельный блок 401 и блок 402 схемы привода. Множество единичных пикселей 200 упорядочиваются горизонтально (направление по ряду) и вертикально (направление по столбцу) в пиксельном блоке 401. Хотя на Фиг. 4 проиллюстрированы в общей сложности шесть единичных пикселей 200 (2 ряда x 3 столбца), в действительности размещаются миллионы или десятки миллионов единичных пикселей 200. Блок 402 схемы привода включает в себя схему источника питания, тактовый генератор (ТГ), схему сканирования, и т.п. для перемещения пиксельного блока 401. Благодаря перемещению пиксельного блока 401 с использованием блока 402 схемы привода, сигналы пикселей всей области захвата изображения пиксельного блока 401 выводятся из пиксельного блока 401 в блок 103 считывания. Блок 402 схемы привода приводится в действие при поступлении управляющего сигнала от управляющего устройства 104, изображенного на Фиг. 1. Аналого-цифровое преобразование (А/Ц преобразование) выполняется на сигналах пикселей из пиксельного блока 401, которые поступают в блок 103 считывания. Необходимо отметить, что блок 103 считывания выполняется с возможностью быть снабженным множеством схем считывания, скажем, одна схема считывания на столбец, например.
Кстати, что касается способа перемещения пиксельного блока 401, шум, такой как перекрестные помехи и избыточное свечение, имеет тенденцию появляться, когда смежные друг с другом ряды перемещаются при разных условиях (частота кадров, время накопления, и т.д.). Однако, в настоящем варианте осуществления, поскольку блок 402 схемы привода равномерно перемещает всю область пиксельного блока 401 при одинаковых условиях, такие проблемы не возникают.
Фиг. 5 является схематическим изображением, показывающим пример единичного пикселя 200 датчика 100 изображения и схему 509 считывания, являющуюся составной частью блока 103 считывания. В единичном пикселе 200 передаточный переключатель 502А соединен с блоком 201А фотоэлектрического преобразования, состоящим из фотодиода (ФД), и передаточный переключатель 502B соединен с блоком 201B фотоэлектрического преобразования. Заряд, генерируемый блоками 201А и 201B фотоэлектрического преобразования, соответственно переносится в общий блок 504 плавающей диффузной области (FD) через передаточные переключатели 502А и 502B и временно сохраняется. Заряд, перенесенный в FD 504, выводится в выходную линию 507 столбца как напряжение, соответствующее заряду, через усилительный МОП-транзистор (SF) 505, формирующий усилитель с общим стоком, когда включен избирательный переключатель 506. Источник 508 тока соединяется с выходной линией 507 столбца.
Переключатель 503 сброса сбрасывает потенциал FD 504 на VDD и потенциалы блоков 201А и 201B фотоэлектрического преобразования на VDD через передаточные ключи 502А и 502B. Передаточные ключи 502А и 502B, переключатель 503 сброса и избирательный переключатель 506, соответственно, управляются управляющими сигналами PTXA, PTXB, PRES и PSEL, через сигнальные линии, которые соединены с блоком 402 схемы привода, который находится снаружи.
Далее будет описана схемная конфигурация схемы 509 считывания. Усилитель 510 усиливает сигнал, выведенный по выходной линии 507 столбца, а конденсатор 512 используется для хранения напряжения сигнала. Запись на конденсатор 512 управляется переключателем 511, который включается и выключается с помощью управляющего сигнала PSH. Опорное напряжение Vslope, подаваемое от схемы генерирования плавно изменяющегося напряжения (не показано), подается на один вход сравнивающего устройства 513, а выход усилителя 510, записанный в конденсаторе 512, подается на другой вход. Сравнивающее устройство 513 сравнивает выход усилителя 510 и опорное напряжение Vslope и выводит одно из двух значений, а именно, низкого уровня и высокого уровня, в зависимости от отношения величин между ними. Конкретнее, низкий уровень выводится в случае, когда опорное напряжение Vslope меньше, чем выход усилителя 510, а высокий уровень выводится в случае, когда опорное напряжение Vslope больше. Синхронизирующие импульсы CLK запускаются в то же самое время, когда опорное напряжение Vslope начинает переход, и счетчик 514 ведет счет в соответствии с синхронизирующими импульсами CLK в случае, когда выходом сравнивающего устройства 513 является высокий уровень, и останавливает сигнал подсчета в то же время, когда выход сравнивающего устройства 513 меняется на низкий уровень. Значение счета в это время хранится либо в памяти 516, либо в памяти 517 в виде цифрового сигнала.
Память 516 хранит цифровой сигнал, полученный посредством А/Ц преобразования сигнала (в дальнейшем "сигнал N") уровня сброса от FD 504, а память 517 хранит цифровой сигнал, полученный посредством А/Ц преобразования сигнала (в дальнейшем "сигнал S"), полученного путем наложения сигнала блока 201А фотоэлектрического преобразования или блока 201B фотоэлектрического преобразования на сигнал N от FD 504. Записывается ли значение счетчика 514 в память 516 или 517, назначается переключателем 515. Разность между сигналами, хранящимися в памяти 516 и 517, вычисляется путем вычитания сигнала N из сигнала S схемой 518 CDS. Эта разность затем выводится на устройство 105 обработки сигналов через выходную линию 519 цифрового сигнала, под управлением блока 402 схемы привода.
Следует отметить, что одна схема 509 считывания размещается для каждого столбца пикселей, и сигналы пикселей считываются в единицах рядов. В этом случае избирательный переключатель 506 управляется в единицах рядов, и сигналы пикселей выбранного ряда выводятся одновременно в соответственные выходные линии 507 столбцов. Сигналы пикселей пиксельного блока 401 могут считываться для устройства 105 обработки сигналов быстрее по мере увеличения количества схем 509 считывания.
Фиг. 6 является временной диаграммой, показывающей пример операции для считывания заряда из единичных пикселей 200 датчика 100 изображения, имеющего схемную конфигурацию, изображенную на Фиг. 5. Схематически показаны выбор времени каждого пускового импульса, опорное напряжение Vslope, синхронизирующие импульсы CLK и сигнал горизонтального сканирования. Также показан потенциал VI выходной линии 507 столбца в каждый момент времени.
Перед считыванием сигнала от блока 201А фотоэлектрического преобразования сигнальная линия PRES переключателя 503 сброса изменяется на Hi (t600). Затвор SF (истокового повторителя) 505, таким образом, сбрасывается до напряжения сброса электропитания. Управляющий сигнал PSEL устанавливается на Hi в момент времени t601, и SF 505 переходит в рабочее состояние. Сброс FD 504 отменяется посредством установки управляющего сигнала PRES на Lo в момент t602. Потенциал FD 504 в это время выводится в выходную линию 507 столбца в качестве уровня сигнала сброса (N сигнал) и подается в схему 509 считывания.
Посредством установки управляющего сигнала PSH на Hi и Lo в моменты времени t603 и t604 для включения и выключения переключателя 511, сигнал N, выводимый выходной линией 507 столбца, сохраняется в конденсаторе 512, будучи усиленным с требуемым коэффициентом усиления в усилителе 510. Потенциал сигнала N, хранящегося в конденсаторе 512, подается на один вход сравнивающего устройства 513. После выключения переключателя 511 в момент времени t604, опорное напряжение Vslope уменьшается с течением времени от начального с помощью схемы генерирования плавно изменяющегося напряжения (не показано) от момента времени t605 до t607. Синхронизирующие импульсы CLK подаются на счетчик 514 вместе с опорным напряжением Vslope, начиная с перехода. Значение счетчика 514 увеличивается в соответствии с количеством CLK. Затем, когда опорное напряжение Vslope на входе сравнивающего устройства 513 достигает того же уровня, что и сигнал N, выход COMP сравнивающего устройства 513 меняется на низкий уровень, и работа счетчика 514 также останавливается в то же самое время (момент времени t606). Значение счетчика 514 в момент остановки работы будет подвергнутым А/Ц преобразованию значением сигнала N. Затем счетчик 514 подключается к памяти 516 с помощью переключателя 515, и цифровое значение сигнала N сохраняется в памяти 516 сигнала N.
После этого фотоэлектрический заряд, накопленный в блоке 201А фотоэлектрического преобразования, переносится в FD 504 посредством установки управляющего сигнала PTXA на Hi и затем Lo в моменты времени t607 и t608 после сохранения оцифрованного сигнала N в памяти 516 сигнала N. Затем изменение потенциала FD 504, который зависит от величины заряда, выводится в выходную линию 507 столбца в качестве уровня сигнала (оптический компонент+компонент шума сброса (сигнал N)) и подается на схему 509 считывания. Входной сигнал (S(A)+N), будучи усиленным с требуемым коэффициентом усиления в усилителе 510, сохраняется в конденсаторе 512 в тот момент времени, когда переключатель 511 включается и выключается по управляющему сигналу PSH, установленного на Hi и затем Lo в моменты времени t609 и t610. Потенциал, хранящийся в конденсаторе 512, подается на один вход сравнивающего устройства 513. После выключения переключателя 511 в момент времени t610, опорное напряжение Vslope уменьшается с течением времени от начального с помощью схемы генерирования плавно изменяющегося напряжения от момента времени t611 к t613. Синхронизирующие импульсы CLK подаются на счетчик 514 вместе с опорным напряжением Vslope, начиная с перехода. Значение счетчика 514 увеличивается в соответствии с количеством CLK. Затем, когда опорное напряжение Vslope на входе сравнивающего устройства 513 достигает того же уровня, что и сигнал S, выход COMP сравнивающего устройства 513 меняется на низкий уровень, и работа счетчика 514 также останавливается в то же самое время (момент времени t612). Значение счетчика 514 в момент остановки работы представляет собой подвергнутое А/Ц преобразованию значение сигнала S(A)+N. Затем память 517 подключается к счетчику 514 с помощью переключателя 515, и цифровое значение сигнала S(A)+N сохраняется в памяти 517 сигнала S. Уровень дифференциального сигнала (оптический компонент) вычисляется схемой 518 CDS, исходя из сигналов, хранящихся в памяти 516 и памяти 517, и получается сигнал S(A), из которого был удален компонент шума сброса. Сигнал S(A) последовательно отправляется в устройство 105 обработки сигналов под управлением управляющего устройства 104.
Выше были описаны операции для считывания сигналов из блока 201А фотоэлектрического преобразования единичного пикселя 200. В случае считывания сигналов из другого блока 201B фотоэлектрического преобразования единичного пикселя 200, управление перемещением необходимо только выполнять аналогичным образом в соответствии с временной диаграммой, изображенной на Фиг. 6. В этом случае, однако, управляющий сигнал PTXB устанавливается на Hi и затем Lo в моменты времени t607 и t608, вместо управляющего сигнала PTXA. То есть, посредством установки управляющего сигнала PTXA на Hi и Lo для вывода пиксельного сигнала S(A), когда перемещение от момента времени t600 до момента времени t613 на Фиг. 6 выполняется в первый раз, а затем установки управляющего сигнала PTXB на Hi и Lo для вывода пиксельного сигнала S(B), когда перемещение от момента времени t600 до момента времени t613 на Фиг. 6 выполняется во второй раз, совершается вывод одного ряда сигналов изображения. В результате повторения этого для всех рядов, совершается вывод пиксельных сигналов S(A) и S(B) всех пикселей.
Фиг. 7 является схематическим изображением, показывающим иллюстративную конфигурацию устройства 105 обработки сигналов и блока 106 вывода датчика 100 изображения. Устройство 105 обработки сигналов имеет устройство 701 обработки сигналов захвата изображения и устройство 702 обработки сигналов обнаружения фокуса. Сигналы пикселей, выводимые из блока 103 считывания, подаются на устройство 105 обработки сигналов через выходную линию 519 цифрового сигнала. Входные сигналы обрабатываются в соответствии с управлением от управляющего устройства 104. Следует отметить, что и устройство 701 обработки сигналов захвата изображения и устройство 702 обработки сигналов обнаружения фокуса предполагают снабжение памятью (не показано).
В устройстве 701 обработки сигналов захвата изображения сигнал захвата изображения вычисляется из сигналов, выводимых из блока 103 считывания. То есть, устройство 701 обработки сигналов захвата изображения принимает пиксельные сигналы S(A) и S(B) блока 201А фотоэлектрического преобразования и блока 201B фотоэлектрического преобразования единичного пикселя 200 и выполняет комбинированную обработку для вычисления сигнала S(A+B). Затем устройство 701 обработки сигналов захвата изображения отправляет пиксельный сигнал S(A+B) в блок 106 вывода через выходную линию 703 сигнала захвата изображения. Устройство 701 обработки сигналов захвата изображения способно уменьшить объем передачи сигналов за пределы датчика 100 изображения за счет объединения пиксельных сигналов S(A) и S(B) двух блоков фотоэлектрического преобразования и вывода объединенного сигнала за пределы датчика 100 изображения из блока 106 вывода. Следует отметить, что работа с пиксельным сигналом S(A) и пиксельным сигналом S(B) становится возможной на стадии, на которой оба пиксельных сигнала единичного пикселя сводятся. Считанный первым пиксельный сигнал S(A) сохраняется в памяти, а когда пиксельный сигнал S(B) считывается и подается на устройство 701 обработки сигналов захвата изображения, последовательно выполняется операция S(A)+S(B), и результирующий сигнал выводится из блока 106 вывода.
Следует отметить, что устройство 701 обработки сигналов захвата изображения может дополнительно выполнять такую обработку, как объединение и усреднение сигналов единичных пикселей 200. Например, в пиксельном блоке, имеющем типичную конфигурацию, в которой предусмотрены красный (R), зеленый (G) и синий (B) цветные фильтры в массиве Байера, объем передач сигналов может быть дополнительно уменьшен, если сигналы соседних пикселей одного и того же цвета объединяются и усредняются перед выводом в блок 106 вывода. Кроме того, вместо вывода сигналов всего пиксельного блока в блок 106 вывода, могут выводиться только сигналы нужной области. Этой обработкой управляет управляющее устройство 104.
Далее будет описана обработка устройством 702 обработки сигналов обнаружения фокуса. Устройство 702 обработки сигналов обнаружения фокуса вычисляет сигнал обнаружения фокуса из сигналов, выводимых от блока 103 считывания, и выводит вычисленный сигнал обнаружения фокуса. Для того чтобы выполнить обнаружение разности фаз, требуются и пиксельный сигнал S(A) и пиксельный сигнал S(B), как описано выше. Однако, количество передач сигналов очень большое, если пиксельные сигналы S(A) и пиксельные сигналы S(B) всех пикселей пиксельного блока 401 выводятся за пределы датчика 100 изображения из блока 106 вывода, и это служит препятствием для высокоскоростного считывания.
В связи с этим обработка вычислительных операций выполняется в устройстве 702 обработки сигналов обнаружения фокуса, и уменьшенное количество сигналов выводится из блока 106 вывода. Например, значения Y яркости вычисляются, соответственно, путем выполнения дополнения Байера на пиксельных сигналах S(A) и S(B), и сигналы Y(A) и Y(B) яркости выводятся. Вычислительные операции для обнаружения фокуса также могут быть выполнены после преобразования сигналов в значения Y, и количество передач сигналов может быть уменьшено до одной четверти, за счет преобразования сигналов в значения Y перед выводом из датчика 100 изображения. Следует отметить, что, так как для вычисления значений Y необходимы сигналы в элементах Байера, сигналы пикселей, подаваемые на устройство 702 обработки сигналов обнаружения фокуса, хранятся в памяти до тех пор, пока не будут сведены необходимые для вычисления сигналы. Другими словами, поскольку сигналы рядов G и B выводятся после вывода сигналов рядов R и G, пиксельные сигналы S(A) и пиксельные сигналы S(B) рядов R и G хранятся в памяти, и когда выводятся сигналы рядов G и B, последовательно выполняются вычислительные операции на сигналах Y(A) и Y(B) яркости, и результирующие сигналы выводятся из блока 106 вывода через сигнальную линию 704.
Кроме того, устройство 702 обработки сигналов обнаружения фокуса может дополнительно выполнять операцию корреляции и выводить результирующее значение в блок 106 вывода через сигнальную линию 704. Следует отметить, что обнаружение разности фаз с использованием операции корреляции может быть реализовано с помощью хорошо известного метода. В случае вывода только значений операции корреляции может быть значительно уменьшено количество сигналов, которые выводятся, хотя это зависит от количества разделенных областей во время операции по корреляции.
Как описано выше, обработка сигналов для вывода только необходимых сигналов за пределы датчика 100 изображения выполняется в датчике 100 изображения, который снабжен устройством 701 обработки сигналов захвата изображения и устройством 702 обработки сигналов обнаружения фокуса. Количество передач сигналов, таким образом, может быть уменьшено, и как данные захвата изображения, так и информация обнаружения фокуса могут быть получены с высокой скоростью.
Следует отметить, что в настоящем варианте осуществления была принята конфигурация, в которой память предусмотрена как в устройстве 701 обработки сигналов захвата изображения, так и в устройстве 702 обработки сигналов обнаружения фокуса. Однако может быть принята конфигурация, в которой блоки памяти предусмотрены на более высоком уровне, и сигналы отправляются в устройство 701 обработки сигналов захвата изображения и устройство 702 обработки сигналов обнаружения фокуса на стадии, на которой сводятся сигналы, необходимые в вычислительных операциях в каждом блоке обработки.
Кроме того, в описании настоящего варианта осуществления сигналы Y(A) и Y(B) яркости выводятся в качестве сигналов обнаружения фокуса, но может быть принята конфигурация, в которой только сигнал Y(A) яркости выводится из блока 106 вывода. Конкретнее, сигнал захвата изображения, то есть пиксельный сигнал S(A+B), выводится из устройства 701 обработки сигналов захвата изображения. Таким образом, сигнал обнаружения фокуса может быть получен путем вычисления сигнала Y(A+B) яркости из пиксельного сигнала S(A+B) в блоке 108 обнаружения разности фаз и т.п., после вывода пиксельного сигнала S(A+B) за пределы датчика 100 изображения, и вычитания сигнала Y(A) яркости для вычисления сигнала Y(B) яркости. Таким образом, количество передач сигналов может быть дополнительно уменьшено за счет вывода только сигнала Y(A) яркости от устройства 702 обработки сигналов обнаружения фокуса.
Например, если устройство обработки сигналов не предусмотрено, в случае, когда количество пикселей составляет 20 мегапикселей, пиксельные сигналы S(A) и S(B) для всех пикселей, то есть, 40 миллионов элементов данных, должны быть выведены. С другой стороны, в случае, когда значение Y вычисляется и выводится как сигнал обнаружения фокуса датчиком изображения, который снабжен устройством обработки сигналов согласно настоящему варианту осуществления, будут выведены 20 миллионов элементов данных для захвата изображения и 5 миллионов элементов данных для обнаружения фокуса (20 миллионов/4), очевидно уменьшая количество передач сигналов. В результате становится возможным высокоскоростное считывание. Кроме того, в случае, когда сигнал обнаружения фокуса является значением операции корреляции, понятно, что количество передач сигналов дополнительно уменьшается.
На временной диаграмме, изображенной на Фиг. 6, также можно получить сигналы единичных пикселей 200, в которых заряд блока 201А фотоэлектрического преобразования и заряд блока 201B фотоэлектрического преобразования объединяются посредством одновременного управления управляющими сигналами PTXA и PTXB в моменты времени t607 и t608. Конкретнее, можно получить пиксельный сигнал S(A+B), если считывание сигнала выполняется под управлением управляющих сигналов PTXA и PTXB так, чтобы осуществлять изменение на Hi и Lo в одно и то же время, после считывания сигнала блока 201А фотоэлектрического преобразования, в соответствии с временной диаграммой, изображенной на Фиг. 6. В этом случае, поскольку считывание сигнала сброса уменьшается на единицу, становится возможным еще более быстрое считывание.
В случае, где пиксельные сигналы S(A) и S(A+B) считываются из пикселей, может быть получен пиксельный сигнал S(B), если обработка для вычитания пиксельного сигнала S(A) из пиксельного сигнала S(A+B) выполняется в устройстве 702 обработки сигналов обнаружения фокуса. В качестве альтернативы, блок 702 обработки обнаружения фокуса может обрабатывать и выводить только пиксельный сигнал S(A), а пиксельный сигнал S(B) или сигнал Y(B) яркости могут быть вычислены в блоке 108 обнаружения разности фаз.
Второй вариант осуществления
Далее будет описан второй вариант осуществления настоящего изобретения. В первом варианте осуществления вывод сигналов обнаружения фокуса выполнялся во всей области пиксельного блока, но если выбираются и выводятся только сигналы необходимых областей, применительно к сигналам обнаружения фокуса, может быть осуществлено дополнительное увеличение скорости обработки.
Фиг. 8A и 8B являются схематическими изображениями, показывающими иллюстративные области вывода сигналов обнаружения фокуса в области пикселей. Сигналы обнаружения фокуса и сигналы захвата изображения выводятся из заштрихованных областей, а из других областей выводятся только сигналы захвата изображения. Например, сигналы обнаружения фокуса только целевых областей дискретно (выборочно) выводятся в широком диапазоне пикселей, как в примере, показанном на Фиг. 8A. Тем самым, становится возможным получать информацию об обнаружении фокуса по всей области пикселей, вместе с тем подавляя количество сигналов, которые выводятся за пределы датчика 100 изображения. В случае примера, показанного на Фиг. 8B, становится возможным получать подробную информацию обнаружения фокуса по частичной области, и тоже подавлять количество сигналов, которые выводятся за пределы датчика 100 изображения. Выбором этих областей, в которых выполнять вывод, управляет управляющее устройство 104. Устройство 702 обработки сигналов обнаружения фокуса считывает только сигналы намеченных для вывода областей из памяти и выполняет вычислительные операции на считанных сигналах.
Следует отметить, что вывод сигналов обнаружения фокуса в частичных областях, таких как показанные на Фиг. 8А и 8B, может быть сигналами значений Y или результатами операции корреляции, но также может быть пиксельными сигналами S(A). Хотя количество передаваемых сигналов увеличивается по сравнению с сигналами значений Y или результатами операции корреляции, достигается подавление количества передач сигналов, так как вывод выполняется только из необходимых областей. Кроме того, это реализуемо даже с помощью сравнительно небольшой схемы обработки сигнала.
Следует отметить, что обработка для объединения и усреднения сигналов обнаружения фокуса также может выполняться в устройстве 702 обработки сигналов обнаружения фокуса. В этом случае обработка для объединения и усреднения выполняется на пиксельных сигналах S(A) и на пиксельных сигналах S(B).
Как описано выше, обработка сигнала для вывода только необходимых сигналов за пределы датчика 100 изображения выполняется в датчике 100 изображения, который снабжен устройством 701 обработки сигналов захвата изображения и устройством 702 обработки сигналов обнаружения фокуса. Количество передач сигналов обнаружения фокуса, таким образом, может быть уменьшено, и как данные захвата изображения, так и информация обнаружения фокуса могут быть получены с высокой скоростью и эффективно.
Следует отметить, что существует способ сокращения времени считывания одного кадра, тем самым ограничивая пиксели, которые будут использоваться при обнаружении фокуса. Обычно увеличение времени считывания подавляется посредством соответственного вывода сигналов двух блоков фотоэлектрического преобразования внутри единичных пикселей только в рядах, которые используются при обработке обнаружения фокуса, а также объединения сигналов этих двух блоков фотоэлектрического преобразования и вывода только сигналов генерирования изображения в рядах, которые не используются при обработке обнаружения фокуса. В этом случае можно объединить отдельные выходные сигналы двух блоков фотоэлектрического преобразования, выводимых в качестве сигналов обнаружения фокуса, и использовать объединенные сигналы в качестве пиксельных сигналов захвата изображения. Однако появляется проблема, состоящая в том, что возникает различие в уровне шума и т.п., вследствие способа считывания сигнала и способа объединения выходных сигналов двух блоков фотоэлектрического преобразования, различающихся в зависимости от того, будет ли ряд использоваться в обработке обнаружения фокуса, что приводит к ухудшению полученного захваченного изображения. Однако, предоставляя устройство обработки сигналов обнаружения фокуса, как в настоящем варианте осуществления, все сигналы от пиксельного блока считываются при аналогичном выборе времени считывания, и могут быть отобраны пиксели, которые будут выводиться устройством 702 обработки сигналов обнаружения фокуса. Таким образом, величина шума пиксельных сигналов S(A+B), которые используются при захвате изображения, не изменяется в зависимости от области, что позволяет получать высококачественные захваченные изображения.
Третий вариант осуществления
Далее будет описан третий вариант осуществления настоящего изобретения. Во втором варианте осуществления был описан пример, в котором устройство 702 обработки сигналов обнаружения фокуса выбирает и выводит только сигналы необходимой намеченной для вывода области среди сигналов обнаружения фокуса. В настоящем варианте осуществления, при дальнейшем следовании этому подходу, будет описан пример, в котором необходимая область среди сигналов обнаружения фокуса устанавливается на основании ввода данных пользователем или области объекта, обнаруженного блоком обнаружения объекта.
Конфигурацией устройства захвата изображения согласно настоящему варианту осуществления является, как показано на Фиг. 9, конфигурация устройства захвата изображения согласно первому и второму вариантам осуществления, показанным на Фиг. 1, к которой добавлен блок 105a обнаружения объекта. Остальная конфигурация аналогична конфигурации, изображенной на Фиг. 1, и поэтому описание блоков, которые являются такими же, опущено, и будут описаны только блоки, которые отличаются.
На Фиг. 9 блок 105a обнаружения объекта, при поступлении вывода цифровых сигналов для генерирования изображения от блока 103 считывания, обнаруживает объект, используя хорошо известную схему обработки распознавания образов, и определяет область обнаружения фокуса для выполнения обработки обнаружения фокуса. Физический признак, такой как лицо или глаза человека или животного, например, приводится в данном документе в качестве объекта, который обнаруживается. Кроме того, внутри блока 105a обнаружения объекта может предусматриваться память, которая временно сохраняет сигналы генерирования изображения, чтобы выполнять обработку обнаружения объекта.
Устройство 105 обработки сигналов имеет устройство 701 обработки сигналов захвата изображения и устройство 702 обработки сигналов обнаружения фокуса, как уже описано с использованием Фиг. 7 в первом варианте осуществления. Операции устройства 701 обработки сигналов захвата изображения аналогичны первому варианту осуществления.
С другой стороны, в устройстве 702 обработки сигналов обнаружения фокуса, аналогично второму варианту осуществления, необходимая область среди вывода цифровых сигналов для обнаружения фокуса выбирается и выводится в блок 106 вывода. Однако в случае, когда область обнаружения фокуса устанавливается вручную, устройство 702 обработки сигналов обнаружения фокуса выборочно выводит сигналы обнаружения фокуса области обнаружения фокуса, произвольно выбранной пользователем. В качестве альтернативы, в случае, когда область обнаружения фокуса устанавливается автоматически, устройство 702 обработки сигналов обнаружения фокуса, при поступлении результата обнаружения объекта блока 105a обнаружения объекта, выборочно выводит сигналы обнаружения фокуса области, в которой обнаружен объект. Блок 106 вывода выводит цифровые сигналы для генерирования изображения, принятые от устройства 701 обработки сигналов захвата изображения, и цифровые сигналы для обнаружения фокуса, принятые от устройства 702 обработки сигналов обнаружения фокуса, за пределы датчика 100 изображения.
Блок 108 обнаружения разности фаз, при поступлении цифрового сигнала для обнаружения фокуса от блока 106 вывода, вычисляет оценочное значение разности фаз для выполнения обнаружения фокуса с применением способа обнаружения разности фаз. В настоящем варианте осуществления сигнал обнаружения фокуса, который подается в блок 108 обнаружения разности фаз, является сигналом, который устройство 702 обработки сигналов обнаружения фокуса в устройстве 105 обработки сигналов, предусмотренном внутри датчика 100 изображения, выводит после выбора области. Соответственно, поскольку сигнал обнаружения фокуса, который блок 106 вывода датчика 100 изображения передает в блок 108 обнаружения разности фаз, является только сигналом, необходимым для управления обнаружением фокуса, полоса пропускания передачи используется эффективно. Кроме того, обработка вычислительных операций для вычисления оценочного значения разности фаз в областях, которые не требуются для управления обнаружением фокуса, и обработка для извлечения сигналов, которые в конечном итоге потребуются для управления обнаружением фокуса, также не требуются во внутренней обработке блока 108 обнаружения разности фаз. Соответственно, блок 108 обнаружения разности фаз способен увеличить скорость обработки, с которой вычисляется оценочное значение разности фаз. Кроме того, масштаб схемы обработки блока 108 обнаружения разности фаз также может быть уменьшен.
Следует отметить, что модуль 110 отображения, изображенный на Фиг. 9, используется не только для отображения сигналов изображения, принятых от общего управляющего/операционного модуля 109, но также и для отображения областей обнаружения фокуса, которые пользователь устройства захвата изображения может выбирать произвольно. Модуль 110 отображения также используется для того, чтобы отображать область объекта, которая является областью, в которой находится объект, обнаруженный блоком 105a обнаружения объекта. В свою очередь, операционный модуль 113 используется для различных типов входных данных, но также используется и для того, чтобы пользователь устройства захвата изображения установил произвольную область обнаружения фокуса. Однако если модуль 110 отображения является сенсорной панелью, операции ввода операционного модуля 113 можно заменить операциями прикосновения на модуле 110 отображения.
Далее, Фиг. 10 является блок-схемой последовательности операций, показывающей поток обработки для АФ по разности фаз плоскости захвата изображения в настоящем варианте осуществления. Когда обработка для АФ по разности фаз плоскости захвата изображения запускается, сначала, на этапе S401, пиксельный блок 401 датчика 100 изображения приводится в действие, и сигналы (сигналы обнаружения фокуса) множества ФД, которые входят в состав единичных пикселей 200 всей области пиксельного блока 401, по отдельности считываются. В это время блок 402 схемы привода может перемещать пиксельный блок 401 в условиях способа сканирования для считывания, такого как считывание с прореживанием ряда, считывание с добавлением ряда, считывание сегмента ряда, считывание с прореживанием столбца, считывание с добавлением столбца, считывание сегмента столбца, в соответствии с требуемой частотой кадров. Однако, как упоминалось выше, блок 402 схемы привода равномерно перемещает пиксельный блок 401 при одинаковых условиях, и поэтому не возникают проблемы, такие как перекрестные помехи и избыточное свечение, имеющие тенденцию появляться.
После этого сигнал каждого ФД подвергается А/Ц преобразованию в блоке 103 считывания, и получается цифровой сигнал для обнаружения фокуса. Кроме того, блок 103 считывания также способен генерировать сигналы генерирования изображения, объединяя цифровые сигналы множества ФД для каждого единичного пикселя 200.
Сигналы обнаружения фокуса и сигналы генерирования изображения всей области пиксельного блока 401 выводятся на устройство 105 обработки сигналов из блока 103 считывания. Сигналы генерирования изображения выводятся за пределы датчика 100 изображения из блока 106 вывода через устройство 105 обработки сигналов и обрабатываются устройством 107 обработки изображений. После этого сгенерированное изображение отображается на модуле 110 отображения посредством общего управляющего/операционного модуля 109. Движущееся изображение непрерывно отображается на модуле 110 отображения, благодаря сигналам генерирования изображения, непрерывно выводимых из датчика 100 изображения с предварительно определенной частотой кадров.
Затем, на этапе S402, подтверждается режим для выбора области обнаружения фокуса. Здесь, в случае, когда область обнаружения фокуса была заранее установлена вручную, чтобы пользователь сфокусировал приемную линзу 101 на произвольной области, обработка переходит к этапу S403. Иллюстративный операционный экран, который в этом случае отображается на модуле 110 отображения, когда пользователь выбирает область обнаружения фокуса, показан на Фиг. 11. Как показано на Фиг. 11, множество областей 1101 обнаружения фокуса, которые могут быть выбраны, отображаются на операционном экране. Здесь показан кадр обнаружения 7:5 (ширина:высота), но кадр обнаружения может быть разделен на более мелкие области или более крупные области. К тому же, вместо того, чтобы выбирать из предварительно определенного кадра обнаружения, пользователь может назначить произвольную позицию на всем экране съемки. Пользователь выбирает область 1102, которая включает в себя лицо человека, например, в качестве области, на которой нужно сфокусироваться. Информация о позиции в области 1102 обнаружения фокуса, выбранной пользователем, подается на устройство 105 обработки сигналов из операционного модуля 113 через общий управляющий/операционный модуль 109.
Затем, на этапе S403, устройство 702 обработки сигналов обнаружения фокуса в устройстве 105 сигналов выбирает сигналы обнаружения фокуса области, назначенной пользователем, среди сигналов обнаружения фокуса всей области пиксельного блока 401, которые выводятся на устройство 105 обработки сигналов из блока 103 считывания на этапе S401. Сигналы обнаружения фокуса, выбранные устройством 702 обработки сигналов обнаружения фокуса, подаются в блок 108 обнаружения разности фаз через блок 106 вывода. В это время, в настоящем варианте осуществления, возможна высокоскоростная передача, поскольку сигналы обнаружения фокуса, которые передаются в блок 108 обнаружения разности фаз посредством блока 106 вывода, являются только сигналами, необходимыми для управления обнаружением фокуса, то есть, сигналы обнаружения фокуса области, назначенной пользователем.
Затем, на этапе S404, блок 108 обнаружения разности фаз, при поступлении цифровых сигналов для обнаружения фокуса от блока 106 вывода, вычисляет оценочное значение разности фаз для выполнения обнаружения фокуса с применением способа обнаружения разности фаз. В это время блок 108 обнаружения разности фаз не требуется, чтобы выполнять обработку вычислительных операций для вычисления оценочного значения разности фаз в областях, которые не требуются для управления обнаружением фокуса, или обработку для извлечения сигналов, которые в конечном итоге потребуются для управления обнаружением фокуса. Соответственно, управление обнаружением фокуса может быть выполнено с высокой скоростью.
Затем, на этапе S405, на основании оценочного значения разности фаз, вычисленного блоком 108 обнаружения разности фаз, управляющее устройство 114 линзы вычисляет информацию о перемещении оптической системы и управляет положением фокусной линзы приемной линзы 101.
Затем, на этапе S406, проверяется, должно ли устройство захвата изображения закончить съемку. Если операция окончания съемки вводится пользователем из операционного модуля 113, съемка немедленно заканчивается. Если операция окончания съемки не вводится пользователем из операционного модуля 113, обработка переходит к этапу S401, и съемка и обработка АФ по разности фаз плоскости захвата изображения продолжаются.
С другой стороны, в случае, когда на этапе S402 параметры настройки были сконфигурированы таким образом, что область, на которой фокусируется приемная линза 101, автоматически определяется устройством захвата изображения, обработка переходит к этапу S407. На этапе S407 блок 105a обнаружения объекта, при поступлении сигнала генерирования изображения от блока 103 считывания, выполняет обработку обнаружения объекта для автоматического определения области, на которой фокусируется приемная линза 101. Подлежащим обнаружению объектом является, например, лицо или глаза человека или животного. В качестве способа обработки обнаружения объекта может применяться разнообразная известная обработка распознавания образов. Метод, называемый сравнение с шаблонами или глубокое обучение, например, представляется типичным методом распознавания образов.
На Фиг. 12A показан иллюстративный экран, который отображается на модуле 110 отображения, чтобы показать область с обнаруженным объектом, обнаруженную блоком 105a обнаружения объекта. Как показано на Фиг. 12A, отображается область 1201 объекта, обнаруженная блоком 105a обнаружения объекта в качестве области, которая включает в себя лицо человека. Блок 105a обнаружения объекта выводит информацию об адресе по горизонтали/вертикали обнаруженной области 1201 объекта в пределах изображения на устройство 105 обработки сигналов. Устройство 105 обработки сигналов выводит информацию об адресе по горизонтали/вертикали области 1201 объекта в пределах изображения на общий управляющий/операционный модуль 109 через блок 106 вывода, чтобы отобразить информацию об адресе по горизонтали/вертикали в качестве области объекта на модуле 110 отображения. Общий управляющий/операционный модуль 109 составляет информацию об области объекта со сгенерированным изображением, обработанным устройством 107 обработки изображений, и отображает составное изображение на модуле 110 отображения. Кроме того, как будет подробно рассмотрено позже, устройство 105 обработки сигналов использует информацию об адресе по горизонтали/вертикали области 1201 объекта в пределах изображения для того, чтобы выбрать сигнал обнаружения фокуса.
Кроме того, на Фиг. 12B показан случай, когда лицо человека кадрировано крупным планом, в качестве другого примера результата обнаружения объекта. В таком примере, как изображенный на Фиг. 12B, область, включающая в себя лицо человека, является большой, и поэтому, если сигналы обнаружения фокуса в области в широком диапазоне, который включает в себя все лицо, будут выводиться в расположенный на более низком уровне блок 108 обнаружения разности фаз, время связи будет длинным, и это будет препятствовать высокоскоростному управлению обнаружением фокуса. Соответственно, как показано на Фиг. 12B, в случае, когда лицо человека обнаружено крупным планом, предпочтительно, если блок 105a обнаружения объекта дополнительно извлекает характерный фрагмент (например, глаза) лица, и устанавливает извлеченный фрагмент в качестве области 1202 обнаружения объекта. Это осуществимо, например, путем обнаружения случая, когда количество пикселей области, в которой блок 105a обнаружения объекта обнаружил лицо, превышает предварительно определенное количество пикселей, и выполнения управления так, чтобы переключить целевой участок для обнаружения объекта.
Затем, на этапе S408, подтверждается результат обнаружения блока 105a обнаружения объекта на этапе S407. Если объект был обнаружен на этапе S407, обработка переходит к этапу S409.
На этапе S409 устройство 105 обработки сигналов выбирает сигналы обнаружения фокуса области, обнаруженной блоком 105a обнаружения объекта, среди сигналов обнаружения фокуса, считываемых из всей области пиксельного блока 401. Сигналы обнаружения фокуса, выборочно выводимые от устройства 105 обработки сигналов, подаются в блок 108 обнаружения разности фаз через блок 106 вывода. В этом случае, в настоящем варианте осуществления, сигналами обнаружения фокуса, которые передаются в блок 108 обнаружения разности фаз посредством блока 106 вывода, являются только сигналы области, необходимой для управления обнаружением фокуса, и, таким образом, могут быть переданы с высокой скоростью.
Затем, на этапе S404, блок 108 обнаружения разности фаз, при поступлении цифровых сигналов для обнаружения фокуса из блока 106 вывода, вычисляет оценочное значение разности фаз для выполнения обнаружения фокуса с применением способа обнаружения разности фаз. В этом случае блок 108 обнаружения разности фаз не требуется для выполнения обработки вычислительных операций для вычисления оценочного значения разности фаз в областях, которые не требуются для управления обнаружением фокуса, или обработки для извлечения сигналов, которые в конечном итоге потребуются для управления обнаружением фокуса. Соответственно, управление обнаружением фокуса может быть выполнено с высокой скоростью. В дальнейшем обработка, которая была уже описана, исполняется на этапах S405 и S406.
С другой стороны, если на этапе S408 подтверждается, что объект не был обнаружен на этапе S407, обработка переходит к этапу S410.
На этапе S410 управляющее устройство 114 линзы выполняет управление, чтобы произвести поисковое перемещение фокусной линзы приемной линзы 101 на предварительно определенную величину. Помимо этого, на этапе S411, проверяется положение фокусной линзы приемной линзы 101, и определяется, закончилось ли поисковое перемещение. Здесь, если поисковое перемещение продолжается, обработка переходит к этапу S401. Соответственно, если параметры настройки на этапе S402 означают автоматическое определение области обнаружения фокуса, и состояние, в котором блок 105a обнаружения объекта не в состоянии обнаружить объект на этапе S407, продолжается, поисковое перемещение фокусной линзы продолжается. Однако если на этапе S411 поисковое перемещение от предельно удаленного конца до ближнего конца закончено, обработка переходит к этапу S412.
На этапе S412 обработка выполняется в том случае, когда блок 105a обнаружения объекта не в состоянии обнаружить объект на этапе S407, даже когда управляющее устройство 114 линзы повторяет операцию для поискового перемещения фокусной линзы на этапе S410. Здесь, чтобы предварительно определить положение фокусной линзы приемной линзы 101, устройство 105 обработки сигналов выбирает сигналы обнаружения фокуса предварительной области среди сигналов обнаружения фокуса, считанных из всей области пиксельного блока 401. Сигналы обнаружения фокуса, выборочно выводимые от устройства 105 обработки сигналов, подаются в блок 108 обнаружения разности фаз, через блок 106 вывода.
Затем, на этапе S404, блок 108 обнаружения разности фаз, при поступлении цифровых сигналов для обнаружения фокуса из блока 106 вывода, вычисляет оценочное значение разности фаз для выполнения обнаружения фокуса с применением способа обнаружения разности фаз. В дальнейшем обработка, которая была уже описана, исполняется на этапах S405 и S406.
Как описано выше, в настоящем варианте осуществления, сигналы обнаружения фокуса, которые передаются в блок 108 обнаружения разности фаз посредством блока 106 вывода датчика 100 изображения, являются только сигналами, необходимыми для управления обнаружением фокуса, и поэтому возможна высокоскоростная передача. Блок 108 обнаружения разности фаз не требуется для выполнения обработки вычислительных операций для вычисления оценочного значения разности фаз в областях, которые не требуются для управления обнаружением фокуса, или обработки для извлечения сигналов, которые в конечном итоге потребуются для управления обнаружением фокуса. Соответственно, блок 108 обнаружения разности фаз способен увеличить скорость обработки, с которой вычисляется оценочное значение разности фаз. Таким образом, управление обнаружением фокуса посредством АФ по разности фаз плоскости захвата изображения может выполняться с высокой скоростью.
Четвертый вариант осуществления
Далее будет описан четвертый вариант осуществления настоящего изобретения. В четвертом варианте осуществления конфигурация единичных пикселей 200 пиксельного блока 402 отличается. Фиг. 13 является схематическим изображением, на котором блок 102 приема света и матрица микролинз датчика 100 изображения наблюдается в направлении оптической оси (направление Z). Четыре блока 901А, 901B, 901C и 901D фотоэлектрического преобразования распределены для одной микролинзы 202. Таким образом, при наличии в общей сложности четырех блоков фотоэлектрического преобразования, составленных по два в направлении Оси X и направлении Оси Y, свет, который прошел через область выходного зрачка, разделенную на четыре, может соответственно приниматься. Будут описаны способ считывания сигнала и обработка посредством устройства 105 обработки сигналов в датчике 100 изображения, в состав которого входит пиксельный блок 401, в котором каждый из таких единичных пикселей снабжен четырьмя блоками фотоэлектрического преобразования.
Фиг. 14 является схематическим представлением, показывающим пример конфигураций единичного пикселя 900 и блока 103 считывания. Конфигурация на Фиг. 14 снабжена схемами считывания, каждая из которых соответствует своему блоку фотоэлектрического преобразования. То есть, пиксельный сигнал блока 901А фотоэлектрического преобразования выводится в схему 1001А считывания. В дальнейшем, аналогично, пиксельные сигналы блоков 901B-901D фотоэлектрического преобразования соответственно выводятся в схемы 1001B-1001D считывания. Поскольку операция считывания сигналов из блоков фотоэлектрического преобразования может быть реализована способом, который по существу аналогичен способу перемещения, описанному на Фиг. 5 и 6, описание этого опущено.
Будет описана обработка посредством устройства 105 обработки сигналов на сигналах, считанных из каждого блока фотоэлектрического преобразования. Устройство 701 обработки сигналов захвата изображения вычисляет сигналы захвата изображения из сигналов, которые были считаны. А именно, устройство 701 обработки сигналов захвата изображения, при поступлении пиксельных сигналов S(A), S(B), S(C) и S(D) множества блоков 901А, 901B, 901C и 901D фотоэлектрического преобразования единичного пикселя 900, выполняет обработку для объединения и вычисляет пиксельный сигнал S(A+B+C+D). Затем пиксельный сигнал S(A+B+C+D) отправляется в блок 106 вывода через выходную линию 703 сигнала захвата изображения. Устройство 701 обработки сигналов захвата изображения может уменьшить количество передач сигналов за пределы датчика 100 изображения, за счет объединения сигналов множества блоков фотоэлектрического преобразования и вывода объединенных сигналов за пределы датчика 100 изображения из блока 106 вывода. В датчике изображения, который снабжен четырьмя блоками фотоэлектрического преобразования, как в случае единичного пикселя 900, этот эффект дополнительно усиливается.
Далее будет описана обработка посредством устройства 702 обработки сигналов обнаружения фокуса. В случае датчика изображения, который снабжен четырьмя блоками фотоэлектрического преобразования на каждый единичный пиксель 900, как показано на Фиг. 13, сигналы четырех блоков фотоэлектрического преобразования должны выводиться по отдельности, чтобы выполнять обнаружение фокуса, и, следовательно, количество передач сигналов является значительным, что нежелательно, если говорить о высокоскоростном считывании. Как описано в первом варианте осуществления, предпочтительно вычислять и выводить значения Y или выводить только результаты операции корреляции. Если выводятся сигналы только необходимых областей, количество передач сигнала может быть дополнительно уменьшено.
В случае конфигурации, в которой единичный пиксель 900 снабжен 2×2 блоками фотоэлектрического преобразования, как показано на Фиг. 13, обнаружение разности фаз также может быть выполнено в направлении вверх-вниз, в дополнение к направлению влево-вправо. Например, пиксельные сигналы S(A) и S(C) объединяются и выводятся, и пиксельные сигналы S(B) и S(D) объединяются и выводятся. В этом случае становится возможным обнаружение фокуса с применением способа разности фаз, в котором разделение зрачка выполняется в направлении влево-вправо, из полученных сигналов обнаружения фокуса. Кроме того, в случае, когда пиксельные сигналы S(A) и S(B) объединяются и выводятся, и пиксельные сигналы S(C) и S(D) объединяются и выводятся, становится возможным обнаружение фокуса с применением способа разности фаз, в котором разделение зрачка выполняется в направлении вверх-вниз, из полученных сигналов обнаружения фокуса. Посредством переключения и вывода этих сигналов в зависимости от объекта, точное обнаружение фокуса может быть выполнено на соответственных объектах в вертикальных полосах и горизонтальных полосах. Кроме того, шаблон вывода может изменяться в зависимости от пиксельной области.
Помимо этого, устройство 702 обработки сигналов обнаружения фокуса может выполнять операцию корреляции, используя объединенные сигналы, которые получены (например, S(A+C) и S(B+D)), и выводить только результат этого. Если обработка операции корреляции выполняется в устройстве 702 обработки сигналов обнаружения фокуса, количество передач сигналов, которые выводятся из датчика 100 изображения, может быть уменьшено. Кроме того, количество передач сигналов может подавляться, даже если операции корреляции как в направлении влево-вправо, так и в направлении вверх-вниз выполняются в одной и той же области, и выводятся их результаты.
В датчике изображения, снабженном многократно разделенными пикселями, что обеспечивает устройство 702 обработки сигналов обнаружения фокуса внутри датчика изображения, может подавляться увеличение количества сигналов, которые выводятся из датчика изображения, и данные захвата изображения и информация обнаружения фокуса могут быть получены с высокой скоростью. Помимо этого, поскольку информация о разности фаз может быть собрана в направлении вправо-влево и в направлении вверх-вниз, обнаружение фокуса может быть выполнено точно. Хотя в настоящем варианте осуществления в качестве примера был описан датчик изображения, имеющий четыре блока фотоэлектрического преобразования на каждый единичный пиксель, может быть принята конфигурация, имеющая больше блоков фотоэлектрического преобразования. Для того чтобы добавить дополнительный параллакс, могут выводиться только необходимые сигналы ФД, или сигналы могут объединяться по диагонали и выводиться.
Пятый вариант осуществления
Поскольку устройство 105 обработки сигналов датчика 100 изображения, такое как описанное в первом-третьем вариантах осуществления, имеет крупномасштабную схему, существует высокая возможность того, что область датчика 100 изображения будет большой. В связи с этим в настоящем варианте осуществления, будет описана конфигурация датчика 100 изображения, которая подавляет увеличение области.
Фиг. 15 и 16 являются схематическими представлениями конфигураций датчика 100 изображения в пятом варианте осуществления. Датчика изображения согласно настоящему варианту осуществления имеет конфигурацию (многослойную структуру), в которой кристалл 1501 пиксельной области и кристалл 1502 обработки сигналов, уложены слоями один над другим. Проводные соединения между полупроводниковыми кристаллами (полупроводниковыми подложками) электрически связаны с помощью контактных микро-выводов или тому подобного, согласно известной технологии укладки подложек слоями один над другим.
Кристалл 1501 пиксельной области снабжен пиксельным блоком 401, в котором единичные пиксели 200, каждый из которых снабжен множеством блоков фотоэлектрического преобразования, составляют матрицу, блоком 402 схемы привода и блоком 103 считывания. Блок 402 схемы привода отправляет сигналы перемещения в пиксели пиксельного блока 401. Следует отметить, что на Фиг. 15 единичные пиксели 200 имеют два блока фотоэлектрического преобразования, но количество блоков фотоэлектрического преобразования не ограничивается этим.
Блок 103 считывания выполняется с возможностью быть снабженным одной схемой 509 считывания на каждый столбец пикселей, например, и считывает пиксельные сигналы пиксельного блока 401. Выбор по вертикали и горизонтали считываемых пиксельных сигналов выполняется под управлением блока 402 схемы привода, и выбранные сигналы последовательно переносятся в устройство 105 обработки сигналов.
Кристалл 1502 обработки сигналов снабжен управляющим устройством 104, устройством 105 обработки сигналов и блоком 106 вывода. Устройство 105 обработки сигналов имеет устройство 701 обработки сигналов захвата изображения и устройство 702 обработки сигналов обнаружения фокуса, и выполняет функции обработки пиксельных сигналов, считываемых из блока 103 считывания, и вывода обработанных пиксельных сигналов за пределы датчика 100 изображения через блок 106 вывода. Поскольку обработка сигналов в устройстве 105 обработки сигналов аналогична обработке, описанной в первом-третьем вариантах осуществления, описание этого опущено. Датчик 100 изображения имеет конфигурацию, в которой кристалл 1501 пиксельной области и кристалл 1502 обработки сигналов выполнены как одно целое, благодаря укладке слоями один над другим, как показано на Фиг. 16.
Как описано выше, благодаря предоставлению датчика изображения со слоистой структурой, может быть гарантировано достаточное пространство для устройства 105 обработки сигналов, что позволяет устанавливать крупномасштабную схему. В устройстве 105 обработки сигналов количество передач сигналов может быть уменьшено за счет выполнения обработки сигнала для вывода только необходимых сигналов за пределы датчика 100 изображения, и становится возможным получать как данные захвата изображения, так и информацию обнаружения фокуса с высокой скоростью.
Шестой вариант осуществления
В датчике изображения, в состав которого входит пиксельный блок, который снабжен множеством блоков фотоэлектрического преобразования на каждый единичный пиксель, такой как описанный в первом-третьем вариантах осуществления, большое количество схем 509 считывания является предпочтительным. Например, поскольку пиксельные сигналы могут выводиться в одно время для всех пикселей и подвергаться А/Ц преобразованию по каждому пикселю в случае принятия конфигурации, снабженной одной схемой считывания на каждый единичный пиксель, и дальнейшего использования конфигурации, снабженной одной схемой считывания на каждый блок фотоэлектрического преобразования, становится возможным более быстрое считывание. В этом случае требуется пространство для размещения схем считывания, и поэтому желательно, чтобы датчик изображения имел слоистую структуру.
Фиг. 17 является схематическим изображением, показывающим конфигурацию датчика 100 изображения в шестом варианте осуществления. Датчик изображения согласно настоящему варианту осуществления имеет конфигурацию, в которой кристалл 1301 пиксельной области, кристалл 1302 схемы считывания и кристалл 1303 обработки сигналов уложены слоями один над другим. Проводные соединения между полупроводниковыми кристаллами (полупроводниковыми подложками) электрически связаны с помощью контактных микро-выводов или тому подобного, согласно известной технологии укладки подложек слоями один над другим.
Кристалл 1301 пиксельной области снабжен пиксельным блоком 401, в котором единичные пиксели 200, снабженные множеством блоков фотоэлектрического преобразования, составляют матрицу, и блоком 402 схемы привода. Блок 402 схемы привода отправляет сигналы перемещения в пиксели пиксельного блока 401. Следует отметить, что на Фиг. 17 единичные пиксели 200 имеют два блока фотоэлектрического преобразования, но количество блоков фотоэлектрического преобразования не ограничивается этим.
Кристалл 1302 схемы считывания снабжен блоком 103 считывания, схемой 1304 выбора по вертикали и схемой 1305 выбора по горизонтали. Блок 103 считывания имеет большое количество схем 509 считывания в соответствии один к одному единичным пикселям или блокам фотоэлектрического преобразования, и пиксельные сигналы пиксельного блока 401 выводятся на них. Пиксельные сигналы, выводимые в схему 509 считывания, последовательно переносятся в устройство 105 обработки сигналов под управлением схемы 1304 выбора по вертикали и схемы 1305 выбора по горизонтали.
Кристалл 1303 обработки сигналов снабжен управляющим устройством 104, устройством 105 обработки сигналов и блоком 106 вывода. Устройство 105 обработки сигналов имеет устройство 701 обработки сигналов захвата изображения и устройство 702 обработки сигналов обнаружения фокуса, и выполняет функции обработки пиксельных сигналов, считываемых из блока 103 считывания, и вывода обработанных пиксельных сигналов за пределы датчика 100 изображения через блок 106 вывода. Поскольку обработка сигналов в устройстве 105 обработки сигналов аналогична обработке, описанной в первом-третьем вариантах осуществления, описание этого опущено.
Датчик 100 изображения имеет конфигурацию, в которой кристалл 1301 пиксельной области, кристалл 1302 схемы считывания и кристалл 1303 обработки сигналов выполнены как одно целое, благодаря укладке слоями один над другим. Кстати, в случае принятия конфигурации, в которой предусмотрена одна схема считывания на каждый блок фотоэлектрического преобразования, как при конфигурации согласно настоящему варианту осуществления, время для вывода пиксельных сигналов на устройство 105 обработки сигналов значительно уменьшается. Например, если время, затраченное для вывода сигнала одним блоком фотоэлектрического преобразования, составляет α, то время, затраченное для того, чтобы считать пиксельные сигналы одного кадра, будет равно α x число рядов, в случае датчика изображения, который снабжен одной схемой считывания на каждый столбец. С другой стороны, в случае, когда предусмотрена одна схема считывания на каждый блок фотоэлектрического преобразования, пиксельные сигналы одного кадра могут быть считаны за время α. В этом случае, однако, имеется опасение, что принятие пиксельных сигналов и обработка сигналов в устройстве 105 обработки сигналов будут определять скорость считывания. Однако, поскольку устройство 105 обработки сигналов датчика 100 изображения со слоистой структурой, как в настоящем варианте осуществления, может быть организовано так, чтобы иметь большое пространство, может быть предусмотрено большое количество линий передачи сигналов от кристалла 1302 схемы считывания, что позволяет отправлять пиксельные сигналы в устройство 105 обработки сигналов с высокой скоростью. Кроме того, поскольку в устройстве 105 обработки сигналов может быть установлено большое количество схем обработки сигналов, становится возможной параллельная обработка, и время обработки сигналов также может быть уменьшено.
Как описано выше, в случае, когда датчик изображения имеет слоистую структуру, может быть получено достаточное пространство для блока считывания и устройства обработки сигналов. Благодаря высокоскоростному считыванию сигналов из пиксельного блока датчика изображения согласно настоящему варианту осуществления, и устройству 105 обработки сигналов, выполняющему обработку сигналов для вывода только необходимых сигналов за пределы датчика изображения, количество передач сигналов может быть уменьшено, и как данные захвата изображения, так и информация обнаружения фокуса могут быть получены с высокой скоростью.
Седьмой вариант осуществления
Фиг. 18 является структурной схемой, показывающей конфигурацию устройства захвата изображения согласно седьмому варианту осуществления настоящего изобретения. На Фиг. 18 составляющие части, которые являются такими же, как в третьем варианте осуществления, будут даны с теми же ссылочными значениями, а подробное описание опущено.
В седьмом варианте осуществления устройство захвата изображения, если рассматривать в целом, состоит из тех же составляющих элементов, что и в третьем варианте осуществления, но составляющие элементы, встроенные внутрь датчика 800 изображения, отличаются от третьего варианта осуществления. Датчик 800 изображения согласно седьмому варианту осуществления выполнен с возможностью включения в себя блока 801 приема света, блока 802 считывания, устройства 803 обработки сигналов, устройства 804 обработки изображений, блока 805 обнаружения объекта, блока 806 обнаружения разности фаз, блока 807 вывода и управляющего устройства 104.
Блок 801 приема света принимает свет оптического изображения, сформированного приемной линзой 101. В блоке 801 приема света размещены пиксели обнаружения фокуса, каждый из которых снабжен множеством ФД под одной микролинзой, так что на каждый принимают световые пучки, которые прошли через разделенную область выходного зрачка приемной линзы 101. Блок 802 считывания выполняет аналого-цифровую обработку сигналов, используя схему А/Ц преобразования, и регулирование (обработка фиксатора) опорного уровня.
Устройство 803 обработки сигналов, при поступлении цифрового сигнала, выводимого из блока 103 считывания, выводит сигналы в блок 806 обнаружения разности фаз и устройство 804 обработки изображений (рассматривается ниже). В это время устройство 803 обработки сигналов, при поступлении результата обнаружения объекта блока 805 обнаружения объекта, выборочно выводит сигналы обнаружения фокуса области обнаружения объекта.
Устройство 804 обработки изображений выполняет обработку изображения, такую как коррекция дефектных пикселей, подавление шума, преобразование цветов, коррекция баланса белого и гамма-коррекция, обработка преобразования разрешения, обработка сжатия изображения, и тому подобное, на сигналах генерирования изображения, принимаемых от устройства 803 обработки сигналов. Блок 805 обнаружения объекта, при поступлении цифрового сигнала, выводимого из устройства 804 обработки изображений, определяет область сигналов для выполнения обработки обнаружения фокуса.
Блок 806 обнаружения разности фаз вычисляет оценочное значение разности фаз для выполнения обнаружения фокуса с применением способа обнаружения разности фаз на сигналах обнаружения фокуса, принимаемых от устройства 803 обработки сигналов. Блок 807 вывода выводит оценочные значения разности фаз и цифровые сигналы для генерирования изображения, которые принимаются от блока 806 обнаружения разности фаз и устройства 804 обработки изображений, за пределы датчика 800 изображения. Таким образом, эффекты, аналогичные третьему варианту осуществления, также получаются с помощью датчика изображения согласно седьмому варианту осуществления настоящего изобретения.
Кстати, при АФ по разности фаз плоскости захвата изображения, одно оценочное значение разности фаз вычисляется посредством выполнения операции корреляции на сигналах обнаружения фокуса, полученных от множества ФД множества пикселей. В третьем варианте осуществления блок 106 вывода выводил множество цифровых сигналов для обнаружения фокуса, которые требуются при вычислении этого оценочного значения разности фаз, за пределы датчика 100 изображения. С другой стороны, в случае седьмого варианта осуществления, блок 807 вывода выводит оценочное значение разности фаз, вычисленное блоком 806 обнаружения разности фаз, за пределы датчика 800 изображения. Другими словами, количество сигналов, которые выводятся за пределы датчика 800 изображения, в седьмом варианте осуществления еще меньше, чем в третьем варианте осуществления. Соответственно, блок 807 вывода датчика 800 изображения может передавать сигналы, необходимые для управления обнаружением фокуса даже за меньшее время, чем в третьем варианте осуществления, и может выполнять управление обнаружением фокуса посредством АФ по разности фаз плоскости захвата изображения с высокой скоростью.
Кроме того, что касается датчика 800 изображения согласно седьмому варианту осуществления, блок 805 обнаружения объекта выполняет обнаружение объекта, используя цифровые сигналы, обработанные устройством 804 обработки изображений. Таким образом, также возможно выполнять обработку обнаружения объекта, которая использует еще и цветовую информацию в дополнение к использованию сигнала, подвергнутого коррекции дефектных пикселей и подавлению шума. Соответственно, обнаружение объекта согласно седьмому варианту осуществления может быть выполнено с большей точностью, чем в третьем варианте осуществления.
Следует отметить, что в случае седьмого варианта осуществления в датчике 800 изображения еще больше составляющих элементов, чем в датчике 100 изображения согласно третьему варианту осуществления, встроено внутрь датчика 800 изображения. Соответственно, предпочтительно, если датчик 800 изображения является слоистым датчиком изображения, таким как показанный на Фиг. 16.
Восьмой вариант осуществления
В первом-третьем вариантах осуществления высокоскоростная АФ по разности фаз плоскости захвата изображения была описана как являющаяся возможной в результате того, что датчик изображения выборочно выводит/передает сигналы обнаружения фокуса. Однако объем применения настоящего изобретения не ограничивается АФ по разности фаз плоскости захвата изображения, и настоящее изобретение также может быть применено к управлению автоматической экспозицией (АЭ по плоскости захвата изображения), которое использует сигналы датчика изображения. В случае АЭ по плоскости захвата изображения, в частности, управление выполняется после того, как устройство захвата изображения автоматически определило апертуру приемной линзы, время накопления датчика изображения, чувствительность (коэффициент усиления) датчика изображения, и тому подобное. В восьмом варианте осуществления настоящего изобретения задача состоит в том, чтобы выполнять более быструю АЭ по плоскости захвата изображения, в результате того, что датчик изображения выборочно выводит/передает сигналы, которые будут использоваться при АЭ по плоскости захвата изображения.
Фиг. 19 является структурной схемой, показывающей конфигурацию устройства захвата изображения согласно восьмому варианту осуществления настоящего изобретения. На Фиг. 19 составляющие части, которые являются такими же, как в третьем варианте осуществления, даны с теми же ссылочными значениями, а их подробное описание опущено. Настоящий вариант осуществления отличается от третьего варианта осуществления тем, что устройство захвата изображения снабжено блоком 820 измерения света.
Устройство 105 обработки сигналов, при поступлении цифрового сигнала, выводимого для генерирования изображения из блока 103 считывания, выводит сигналы в блок 106 вывода. Устройство 105 обработки сигналов выбирает цифровые сигналы для генерирования изображения, которые будут использоваться при АЭ по плоскости захвата изображения, согласно способу измерения света, применяемому в устройстве захвата изображения. В это время, например, в случае так называемых "способа точечного измерения" и "способа частичного измерения", устройство 105 обработки сигналов выбирает сигналы частичной области в середине экрана, например. Кроме того, в случае так называемого "способа оценочного измерения", устройство 105 обработки сигналов выбирает сигналы всего экрана. Однако выбор сигналов путем прореживания ряда или прореживания столбца в диапазоне, в котором получается количество сигналов, необходимое при вычислении оценочного значения измерения света, вместо того, чтобы выбирать сигналы всех пикселей всего экрана, предпочтителен для того, чтобы выполнить более быструю АЭ по плоскости захвата изображения. Кроме того, аналогично третьему варианту осуществления, может быть принята конфигурация, в которой выбираются сигналы генерирования изображения области обнаружения фокуса, произвольно выбранной пользователем, и области объекта, обнаруженной блоком 105a обнаружения объекта.
Блок 820 измерения света, при поступлении цифрового сигнала для генерирования изображения из блока 106 вывода, вычисляет оценочное значение измерения света для выполнения АЭ по плоскости захвата изображения. Цифровые сигналы для генерирования изображения, которые подаются в блок 820 измерения света, являются сигналами области, выбранной устройством 105 обработки сигналов, предусмотренным внутри датчика 100 изображения. Соответственно, поскольку сигналы генерирования изображения для АЭ по плоскости захвата изображения, которые блок 106 вывода датчика 100 изображения передает в блок 820 измерения света, являются только сигналами, необходимыми для управления экспозицией, полоса частот канала связи группа используется эффективно. Обработка вычислительных операций для вычисления оценочного значения измерения света в областях, которые в конечном итоге не потребуются при АЭ по плоскости захвата изображения, и обработка для извлечения сигнала, который в конечном итоге потребуется, также не требуются во внутренней обработке блока 820 измерения света. Соответственно, блок 820 измерения света способен увеличить скорость обработки, с которой вычисляется оценочное значение измерения света.
Управляющее устройство 114 линзы, при поступлении вывода оценочного значения измерения света из блока 820 измерения света, перемещает диафрагму приемной линзы 101, на основании оценочного значения измерения света. Помимо этого, общий управляющий/операционный модуль 109 перемещает датчик 100 изображения на основании оценочного значения измерения света, и управляет временем накопления и чувствительностью (коэффициентом усиления) датчика 100 изображения.
В соответствии с восьмым вариантом осуществления настоящего изобретения, как описано выше, поскольку сигналы генерирования изображения, которые блок 106 вывода датчика 100 изображения передает в блок 820 измерения света, являются только сигналами, необходимыми для АЭ по плоскости захвата изображения, возможна высокоскоростная передача. Блок 820 измерения света не требуется для выполнения обработки вычислительных операций для вычисления оценочного значения измерения света, которое в конечном итоге не потребуется при АЭ по плоскости захвата изображения, или обработки для извлечения сигналов, которые в конечном итоге потребуются. Соответственно, может быть выполнена более быстрая АЭ по плоскости захвата изображения.
Следует отметить, что в пикселях датчика 100 изображения согласно восьмому варианту осуществления не обязательно, чтобы размещалось множество ФД для каждого пикселя, как рассматривалось на Фиг. 2. При условии, что имеются сигналы для генерирования изображения (т.е. сигналы, полученные посредством объединения сигналов множества ФД под одной микролинзой по каждому пикселю) для вычисления оценочного значения измерения света, может быть принята конфигурация, в которой имеется один ФД под каждой микролинзой.
Хотя в восьмом варианте осуществления и была описана конфигурация, которая применяет АЭ по плоскости захвата изображения на основе конфигурации согласно третьему варианту осуществления, АЭ по плоскости захвата изображения может аналогично применяться на основе конфигурации согласно седьмому варианту осуществления. В этом случае датчик 800 изображения формируется посредством замены блока 806 обнаружения разности фаз, изображенного на Фиг. 18, на блок измерения света.
Хотя выше и были описаны предпочтительные варианты осуществления, настоящее изобретение не ограничивается этими вариантами осуществления, и могут быть произведены различные модификации и изменения, которые соответствуют сущности настоящего изобретения.
Другие варианты осуществления
Вариант(ы) осуществления настоящего изобретения также может быть реализован посредством компьютера системы или устройства, который считывает и исполняет исполняемые компьютером инструкции (например, одну или несколько программ), записанные на носителе данных (который также может более полно именоваться как 'долговременный машиночитаемый носитель данных'), чтобы выполнить функции одного или нескольких из вышеописанных вариантов осуществления, и/или который включает в себя одну или несколько схем (например, специализированную интегральную схему (СИС)) для выполнения функций одного или нескольких из вышеописанных вариантов осуществления, и посредством способа, выполняемого компьютером системы или устройства, например, посредством считывания и исполнения исполняемых компьютером инструкций с носителя данных для выполнения функций одного или нескольких из вышеописанных вариантов осуществления, и/или управления одной или несколькими схемами для выполнения функций одного или нескольких из вышеописанных вариантов осуществления. Компьютер может содержать одно или несколько обрабатывающих устройств (например, центральный процессорный блок (ЦП), микропроцессорный блок (МП)) и может включать в себя сеть отдельных компьютеров или отдельных обрабатывающих устройств для считывания и исполнения исполняемых компьютером инструкций. Исполняемые компьютером инструкции могут быть предоставлены компьютеру, например, из сети или с носителя данных. Носитель данных может включать в себя, например, один или несколько жестких дисков, оперативное запоминающее устройство (ОЗУ), постоянное запоминающее устройство (ПЗУ), хранилище распределенных вычислительных систем, оптический диск (такой как компакт-диск (CD), цифровой универсальный диск (DVD) или Blu-ray Disc (BD)™), устройство флэш-памяти, карту памяти, и тому подобное.
Тогда как настоящее изобретение было описано со ссылкой на иллюстративные варианты осуществления, следует понимать, что настоящее изобретение не ограничивается раскрытыми иллюстративными вариантами осуществления. Объем нижеприведенной формулы изобретения должен быть представлен в самой широкой интерпретации, чтобы охватывать все такие модификации и эквивалентные структуры и функции.
Настоящая заявка испрашивает приоритет в отношении Заявок на патент Японии № 2015-183246 и № 2015-183247, обе зарегистрированы 16 сентября 2015, и № 2016-144756, зарегистрирована 22 июля 2016, содержание которых полностью включается в настоящую заявку посредством ссылки.




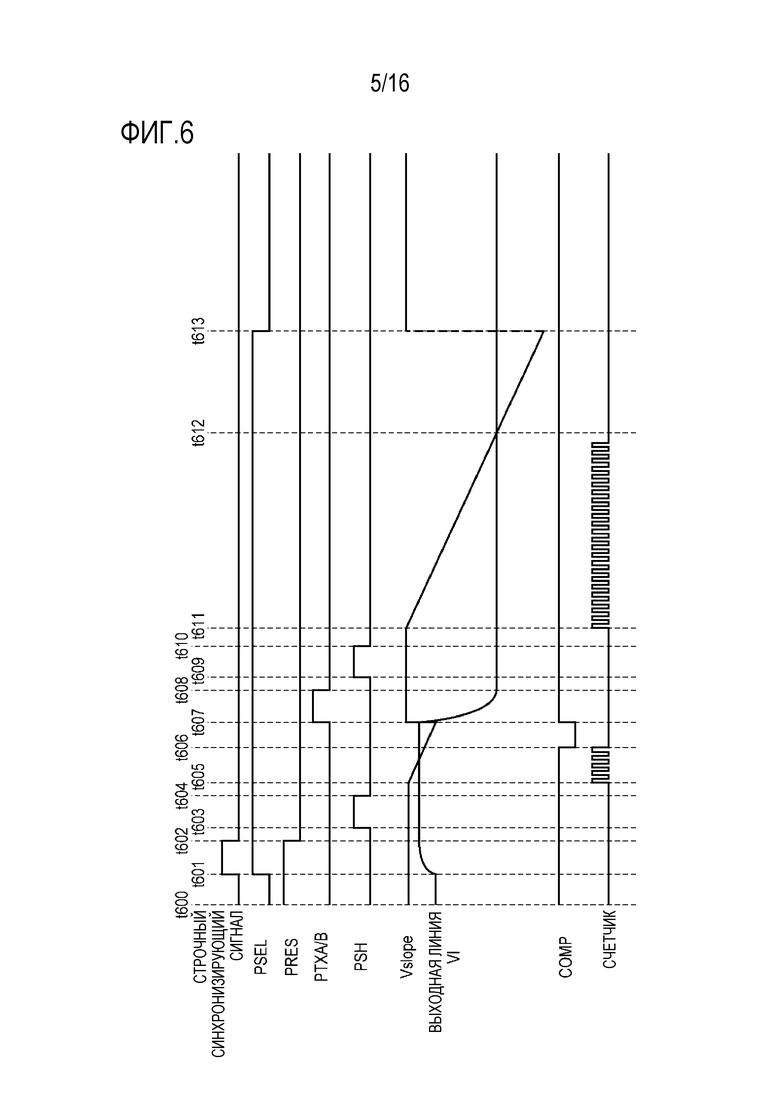
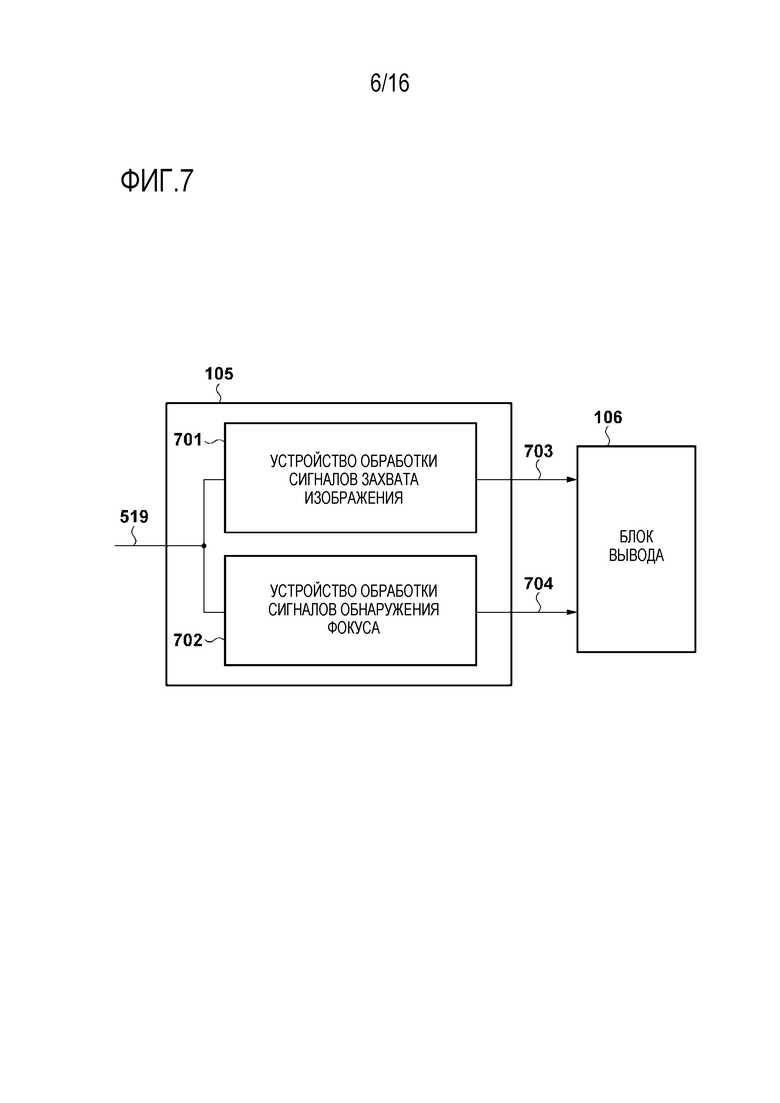
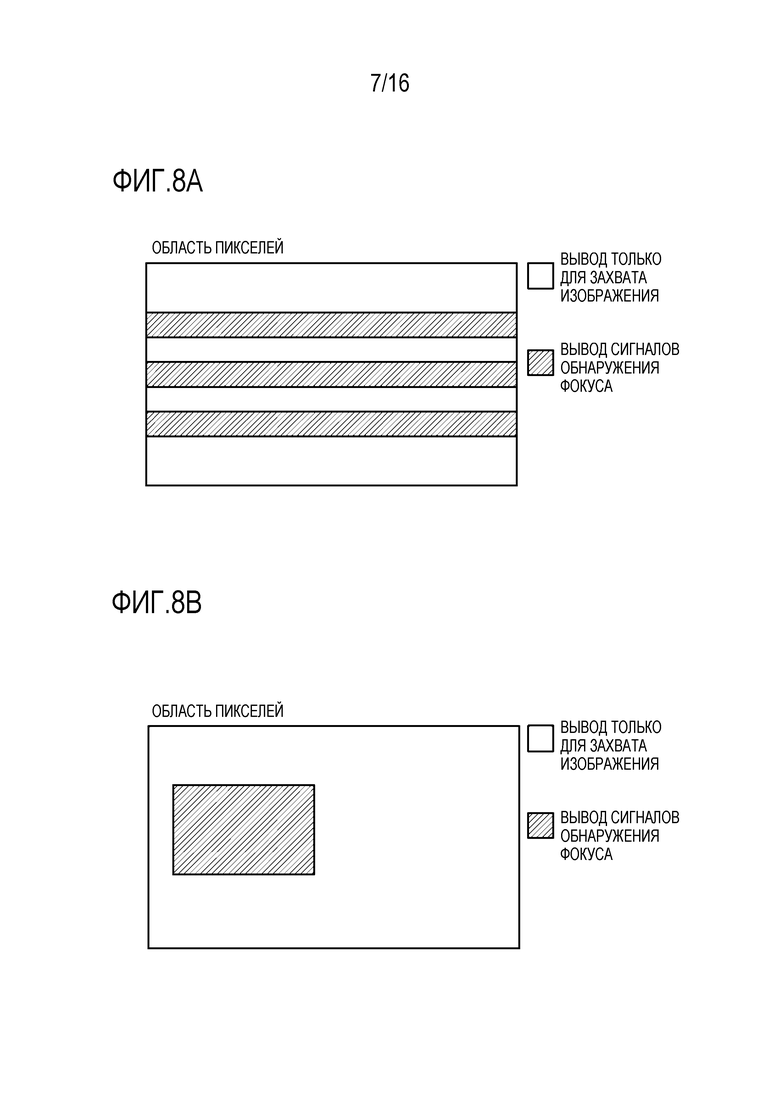






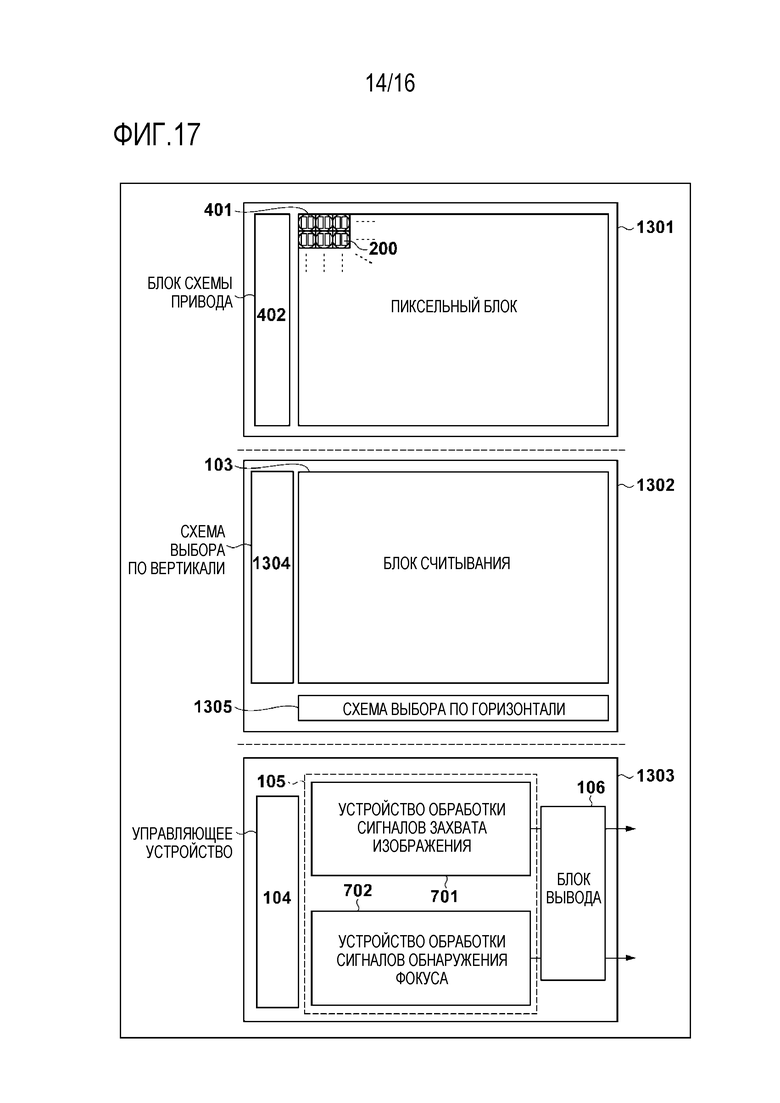


Изобретение относится к датчику изображения и устройству захвата изображения. Техническим результатом является предоставление датчика изображения, который может значительно сократить время, затрачиваемое для того, чтобы вывести от датчика изображения сигналы, необходимые для управления приводом устройства захвата изображения, такие как сигналы обнаружения фокуса. Результат достигается тем, что датчик изображения, включающий в себя пиксельный блок, в котором множество единичных пикселей, каждый из которых имеет одну микролинзу и множество блоков фотоэлектрического преобразования, составляет матрицу, блок считывания сигналов, который считывает сигналы, накопленные в блоках фотоэлектрического преобразования, и преобразует считанные сигналы в цифровые сигналы, устройство обработки сигналов, которое обрабатывает сигналы, считанные блоком считывания сигналов, и имеет устройство обработки сигналов захвата изображения, которое выполняет обработку сигналов для генерирования захваченного изображения по сигналам, считанным блоком считывания сигналов, и устройство обработки сигналов обнаружения фокуса, которое выполняет обработку сигналов для обнаружения фокуса по сигналам, считанным блоком считывания сигналов, и блок вывода, который выводит сигналы, обработанные устройством обработки сигналов. 5 н. и 18 з.п. ф-лы, 21 ил.
1. Датчик изображения, содержащий:
пиксельный блок, в котором множество единичных пикселей, каждый из которых имеет одну микролинзу и множество блоков фотоэлектрического преобразования, составляет матрицу;
блок хранения сигналов, выполненный с возможностью хранения сигналов, выводимых от единичных пикселей всей области пиксельного блока;
устройство обработки сигналов, выполненное с возможностью обработки сигналов, хранящихся в блоке хранения сигналов, и имеющее устройство обработки сигналов захвата изображения, выполненное с возможностью выполнения обработки сигналов для генерирования захваченного изображения по сигналам, хранящимся в блоке хранения сигналов, и устройство обработки сигналов обнаружения фокуса, выполненное с возможностью выполнения обработки сигналов для обнаружения фокуса по сигналам, хранящимся в блоке хранения сигналов; и
блок вывода, выполненный с возможностью вывода сигналов, обработанных устройством обработки сигналов.
2. Датчик изображения по п. 1, в котором устройство обработки сигналов обнаружения фокуса выбирает сигналы единичных пикселей в целевой области в пиксельном блоке из сигналов всей области пиксельного блока, хранящихся в блоке хранения сигналов, и выводит сигнал по меньшей мере одного блока фотоэлектрического преобразования среди сигналов множества блоков фотоэлектрического преобразования каждого из выбранных единичных пикселей.
3. Датчик изображения по п. 2, в котором устройство обработки сигналов обнаружения фокуса соответственно выводит сигналы множества блоков фотоэлектрического преобразования каждого из выбранных единичных пикселей.
4. Датчик изображения по п. 2, в котором устройство обработки сигналов обнаружения фокуса выборочно объединяет и выводит сигналы множества блоков фотоэлектрического преобразования каждого из выбранных единичных пикселей.
5. Датчик изображения по п. 1, в котором устройство обработки сигналов обнаружения фокуса выбирает сигналы единичных пикселей в целевой области в пиксельном блоке из сигналов всей области пиксельного блока, хранящихся в блоке хранения сигналов, и выполняет операцию корреляции на сигналах множества блоков фотоэлектрического преобразования каждого из выбранных единичных пикселей, и выводит значение, вычисленное посредством операции корреляции.
6. Датчик изображения по п. 1, в котором блок хранения сигналов имеет множество удерживающих схем, каждая из которых выполнена с возможностью хранения сигналов, выводимых из блоков фотоэлектрического преобразования каждого единичного пикселя.
7. Датчик изображения по п. 1, в котором блок хранения сигналов имеет множество удерживающих схем, каждая из которых выполнена с возможностью хранения сигналов, выводимых из блоков фотоэлектрического преобразования каждого единичного пикселя по каждому столбцу.
8. Датчик изображения по п. 1, в котором устройство обработки сигналов захвата изображения имеет устройство обработки сжатия, выполненное с возможностью сжатия и вывода сигналов множества блоков фотоэлектрического преобразования каждого единичного пикселя.
9. Датчик изображения по п. 8, в котором устройство обработки сжатия объединяет и усредняет сигналы множества блоков фотоэлектрического преобразования каждого единичного пикселя.
10. Датчик изображения по п. 1, имеющий слоистую структуру, сформированную из множества полупроводниковых подложек,
при этом пиксельный блок и устройство обработки сигналов сформированы на взаимно разных полупроводниковых подложках.
11. Устройство захвата изображения, содержащее:
датчик изображения;
устройство обработки изображений, выполненное с возможностью обработки сигналов, выводимых от датчика изображения, и генерирования изображения; и
устройство обнаружения фокуса, выполненное с возможностью обработки сигналов считывания и выполнения обнаружения фокуса,
при этом датчик изображения включает в себя:
пиксельный блок, в котором множество единичных пикселей, каждый из которых имеет одну микролинзу и множество блоков фотоэлектрического преобразования, составляет матрицу;
блок хранения сигналов, выполненный с возможностью хранения сигналов, выводимых от единичных пикселей всей области пиксельного блока;
устройство обработки сигналов, выполненное с возможностью обработки сигналов, хранящихся в блоке хранения сигналов, и имеющее устройство обработки сигналов захвата изображения, выполненное с возможностью выполнения обработки сигналов для генерирования захваченного изображения по сигналам, хранящимся в блоке хранения сигналов, и устройство обработки сигналов обнаружения фокуса, выполненное с возможностью выполнения обработки сигналов для обнаружения фокуса по сигналам, хранящимся в блоке хранения сигналов; и
блок вывода, выполненный с возможностью вывода сигналов, обработанных устройством обработки сигналов.
12. Датчик изображения, содержащий:
пиксельный блок, в котором размещено множество пикселей, выполненных с возможностью фотоэлектрического преобразования света от объекта;
блок считывания, выполненный с возможностью считывания сигналов от пиксельного блока; и
блок вывода, выполненный с возможностью вывода, из числа сигналов, считанных блоком считывания, сигналов пикселей всей области пиксельного блока за пределы датчика изображения, в качестве сигналов для генерирования изображения, и сигналов пикселей частичной области пиксельного блока за пределы датчика изображения, в качестве сигналов для вычисления оценочного значения, которое будет использоваться при управлении приводом устройства, которое включает в себя датчик изображения.
13. Датчик изображения по п. 12, содержащий блок аналого-цифрового (А/Ц) преобразования, выполненный с возможностью преобразования сигналов, которые выводятся от пикселей, в цифровые сигналы.
14. Датчик изображения по п. 12, дополнительно содержащий:
блок обнаружения объекта, выполненный с возможностью обнаружения области объекта, которая является областью, в которой находится объект в пиксельном блоке,
при этом блок вывода выводит, применительно к сигналам для вычисления оценочного значения, которое будет использоваться при управлении приводом устройства, которое включает в себя датчик изображения, сигналы пикселей области объекта за пределы датчика изображения.
15. Датчик изображения по п. 12, в котором каждый из пикселей имеет одну микролинзу и множество блоков фотоэлектрического преобразования.
16. Датчик изображения по п. 15, в котором
сигналы для вычисления оценочного значения, которое будет использоваться при управлении приводом устройства, которое включает в себя датчик изображения, являются сигналами для выполнения управления обнаружением фокуса, и
блок вывода выводит, за пределы датчика изображения, сигналы, которые идут от пикселей частичной области всей области пиксельного блока и которые служат основанием для вычисления оценочного значения разности фаз, которое будет использоваться при управлении обнаружением фокуса с применением способа обнаружения разности фаз.
17. Датчик изображения по п. 15, в котором блок считывания считывает сигналы всего множества блоков фотоэлектрического преобразования.
18. Датчик изображения по п. 12, в котором
сигналы для вычисления оценочного значения, которое будет использоваться при управлении приводом устройства, которое включает в себя датчик изображения, являются сигналами для выполнения управления автоматической экспозицией, и
блок вывода выводит, за пределы датчика изображения, сигналы, которые идут от пикселей частичной области всей области пиксельного блока и которые служат основанием для вычисления оценочного значения измерения света, которое будет использоваться при управлении автоматической экспозицией.
19. Датчик изображения по п. 18, дополнительно содержащий:
блок измерения света, выполненный с возможностью вычисления оценочного значения измерения света.
20. Датчик изображения, содержащий:
пиксельный блок, в котором размещено множество пикселей, выполненных с возможностью фотоэлектрического преобразования света от объекта;
блок считывания, выполненный с возможностью считывания сигналов от пиксельного блока;
блок обнаружения разности фаз, выполненный с возможностью вычисления оценочного значения разности фаз, которое будет использоваться при управлении обнаружением фокуса с применением способа обнаружения разности фаз; и
блок вывода, выполненный с возможностью вывода, из числа сигналов, считанных блоком считывания, сигналов пикселей всей области пиксельного блока за пределы датчика изображения, в качестве сигналов для генерирования изображения, и оценочного значения разности фаз, вычисленного блоком обнаружения разности фаз с использованием сигналов пикселей частичной области пиксельного блока, за пределы датчика изображения.
21. Датчик изображения по п. 12, имеющий слоистую структуру, сформированную посредством укладки слоями один над другим множества полупроводниковых подложек.
22. Устройство захвата изображения, содержащее:
датчик изображения, включающий в себя:
пиксельный блок, в котором размещено множество пикселей, выполненных с возможностью фотоэлектрического преобразования света от объекта;
блок считывания, выполненный с возможностью считывания сигналов от пиксельного блока; и
блок вывода, выполненный с возможностью вывода, из числа сигналов, считанных блоком считывания, сигналов пикселей всей области пиксельного блока за пределы датчика изображения, в качестве сигналов для генерирования изображения, и сигналов пикселей частичной области пиксельного блока за пределы датчика изображения, в качестве сигналов для вычисления оценочного значения, которое будет использоваться при управлении приводом устройства, которое включает в себя датчик изображения; и
устройство выбора, выполненное с возможностью выбора частичной области.
23. Устройство захвата изображения по п. 22, дополнительно содержащее:
модуль настройки, выполненный с возможностью установки либо режима, в котором пользователь назначает частичную область, либо режима, в котором частичная область выбирается автоматически.
| US 2014192249 A1, 2014.07.10 | |||
| US 2014347537 A1, 2014.11.27 | |||
| US 2014340555 A1, 2014.11.20 | |||
| US 2013088621 A1, 2013.04.11 | |||
| US 2014146196 A1, 2014.05.29 | |||
| US 2014340565 A1, 2014.11.20 | |||
| US 9065988 B2, 2015.06.23 | |||
| ЭЛЕМЕНТ ДЛЯ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ, И УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ И ФОТОГРАФИЧЕСКАЯ СИСТЕМА, ЕГО СОДЕРЖАЩАЯ | 2012 |
|
RU2503046C1 |

