Настоящее изобретение относится к буровому полу для буровой установки, системе для перемещения предметов на буровом полу, способу компоновки предметов на буровом полу буровой установки, модульным основаниям для применения на буровом полу и кабине бурильщика.
В бурении ствола скважины, буровое долото располагается в компоновке низа бурильной колонны на нижнем конце бурильной колонны. Буровое долото вращают для бурения ствола в пласте породы. Пласт может быть расположен под водой или под поверхностью суши. Верхний конец бурильной колонны проходит через проем в буровом полу буровой установки. Проем известен, как центр устья скважины. Бурильная колонна собирается на буровой установке и спускается в ствол с применением каната, выбираемого и вытравливаемого лебедкой, известной как буровая лебедка. Канат проходит от буровой лебедки, по кронблоку, закрепленному неподвижно на вершине вышки, и проходит вниз на талевый блок, который перемещается вверх и вниз в вышке для подъема или опускания свечей бурильных труб и/или бурильной колонны в целом.
Буровое долото, по меньшей мере вначале, вращают с помощью вращения бурильной колонны. Бурильную колонну могут вращать посредством бурового ротора, расположенного по центру устья скважины в буровом полу. В данном случае на талевый блок подвешивают вертлюг, который имеет элеватор, прикрепленный к нему, на котором бурильная колонна удерживается для опускания и поднимания. Альтернативно или дополнительно, бурильная колонна может вращаться верхним приводом, перемещающимся вверх и вниз по монорельсу на вышке. Талевый блок соединен с верхним приводом для подъема и опускания верхнего привода по рельсовому пути. Элеватор верхнего привода подвешен к верхнему приводу на штропах. Падение бурильной колонны в скважину предотвращают клиновые сухари, выполненные в спайдере в буровом полу. При бурении ствола звенья бурильных труб добавляют в бурильную колонну для обеспечения углубления бурового долота в пласт. Звенья бурильных труб обычно добавляют в свечах из двух или чаще трех звеньев. Свечи бурильных труб скрепляют в стороне от центра устья скважины в шурфе для для наращивания труб или шурфе ведущей бурильной трубы. Свечи скрепляют, применяя устройство для механизированной подвески и развинчивания труб или: отдельное вращающее устройство для завинчивания концов с резьбовым нипелем верхнего звена бурильной трубы в соответствующие резьбовые муфты нижнего звена бурильной трубы для выполнения соединения; и трубный ключ для передачи крутящего момента на соединение. Устройство подачи и укладки труб перемещает звенья труб с трубных мостков, стеллажей или конвейера для совмещения с шурфом для для наращивания труб или шурфом под ведущую бурильную трубу. Другое устройство подачи и укладки труб перемещает свечу бурильных труб в дополнительный свечеприемник или напрямую у центру устья скважины для соединения с бурильной колонной. Альтернативно, свечу бурильных труб перемещают к центру устья скважины на конвейерной ленте, и элеватор или элеватор верхнего привода применяют для подъема верхнего конца свечи бурильной трубы, после чего нижний конец заводят в совмещение с центром устья скважины. Манипулятор для хвостовой части бурильной трубы применяетcя для управления свободным нижним концом бурильной трубы и совмещения его с центром устья скважины. Свечу бурильных труб затем соединяют с колонной бурильных труб, подвешенной в скважине. Соединение выполняют, применяя устройство для механизированной подвески и развинчивания труб или отдельное вращающее устройство и трубный ключ. Устройство для механизированной подвески и развинчивания труб может опираться на рычаг, вращaющийся вокруг тумбы, так что оно перемещается между центром устья скважины и шурфом для наращивания труб (US2005/0047884). Известно перемещение механизированного трубного ключа на колесах (US-A-5,259,275) и комплекте направляющих (US-B2-7,861,619) к центру устья скважины и от него, подвешенного на вспомогательном канате и поворачиваемого (US-A-6,082,224), и применение гибких цепей, которые стыкуются для образования жесткого элемента, толкающего подвешенный трубный ключ к центру устья скважины и от него (US-A-5,368,113) и применение телескопического манипулятора (WO 98/32947).
Буровой раствор подается насосом вниз через бурильную колонну на буровое долото и наружу через отверстия в буровом долоте или вблизи него. Буровой шлам смывается, уходя вверх через кольцевое пространство между бурильной колонной и стенкой ствола в выкидную линию на буровой установке. Оборудование для очистки бурового раствора, такое как вибросита, центрифуги, гидроциклоны, дегазаторы и пескоотделители установлено выше по потоку от ряда накопительных емкостей, известных как система активного запаса бурового раствора. Буровой раствор в системе активного запаса бурового раствора непрерывно подается из выкидной линии, непрерывно перерабатывается с удалением из него твердой фазы, его испытывают, в него вводят добавки и возвращают в скважину через штуцерное соединение на верхнем приводе или вертлюге через бурильную колонну.
Для улучшения целостности ствола в нем могут выполнять крепление обсадной колонной. Обсадную колонну спускают в ствол и подвешивают на оборудовании устья скважины или опорной плите на поверхности. Во время строительства обсадной колонны обсадную колонну наращивают звеньями обсадной трубы при спуске в скважину. Обсадная колонна в общем имеет диаметр гораздо больше диаметра бурильной трубы и, следовательно, требует отличающегося комплекта инструментов на буровом полу. Буровой пол при этом освобождают от инструментов, применяемых в бурении и заменяют их инструментами для работы с обсадной колонной. Например: устройство для механизированной подвески и развинчивания труб заменяют на трубный ключ обсадной колонны, устройство для механизированной подвески и свинчивания труб, подходящее для обсадной колонны, или спускной инструмент для обсадной колонны прикрепляют к верхнему приводу; элеватор для бурильной трубы заменяют элеватором для обсадной колонны; манипулятор для хвостовой части бурильной трубы заменяют манипулятором для хвостовой части обсадной трубы; и спайдер заменяют или приспосабливают для обсадной колонны. Звено обсадной трубы перемещают в совмещение с устройством подачи и укладки труб, или элеватор обсадной трубы применяют для подъема верхнего конца с конвейера, при этом нижний конец заводят в совмещение с центром устья скважины и обсадной колонной, подвешенной в скважине. Устройство подачи хвоста обсадной трубы принимает нижний свободный конец обсадной трубы и выставляет по центру устья скважины. Звено обсадной трубы затем соединяют с обсадной колонной подвешенной в скважине. Соединение выполняют с применением вращающего трубного ключа для обсадной колонны и связанного удерживающего трубного ключа, устройства для механизированной подвески и развинчивания труб, подходящее для обсадной трубы или спускного инструмента для обсадной колонны, применяя вращение верхним приводом, при этом крутящему моменту противодействует обсадная колонна, удерживаемая в спайдере обсадной колонны в буровом полу. После завершения строительства обсадной колонны, она подвешиваетсся на опорной плите или оборудовании устья скважины. Для центрирования обсадной колонны в скважине могут применять центраторы, которые можно монтировать на звеньях обсадной колонны перед их перемещением на центр устья скважины.
Обсадную колонну можно цементировать на месте установки. Указанное обычно выполняют в процессе цементирования. Цементировочную головку перемещают с места складирования на мостках. Нижняя цементировочная пробка продавливается вдоль обсадной колонны цементом, подаваемым на нее, отделяя цемент от бурового раствора в обсадной колонне. Верхняя цементировочная пробка следует после заданного объема цемента. После достижения башмака обсадной колонны в нижней цементировочной пробке разрывается разрывной диск, обеспечивая выход цемента из башмака и проход вверх в кольцевом пространство между обсадной колонной и стенкой скважины. Верхняя цементировочная пробка достигает нижней пробки, когда нагнетание цемента в кольцевое пространство выполнено в полном объеме.
Некоторое число противовыбросовых превенторов (BOP) могут быть соединены с опорной плитой для создания оборудования устья скважины. В морской буровой установке райзер может не быть установлен между оборудованием устья скважины на морском дне и морской буровой установкой. Установку противовыбросовых превенторов на морской буровой установке проводят с морской буровой установки. Обычно, спайдер снимают и противовыбросовые превенторы или комплектное оборудование устья скважины спускают с пола под буровым полом, применяя канат с буровой лебедки. Райзер является, в общем, трубой большого диаметра и может иметь конструкцию с наружным скелетом, которая спускается и соединяются с применением методики, аналогичной бурильной трубе или обсадной колонне, но требуют специальных инструментов на буровом полу.
Затем продолжается бурение через райзер и оборудование устья скважины и, следовательно, комплект инструментов опять меняется на комплект, применяемый для бурения. Когда бурильная колонна имеет большую длину, возникают трудности для передачи крутящего момента с верхнего привода или бурового ротора на буровое долото. Можно применять гидравлический забойный двигатель. Гидравлический забойный двигатель устанавливают вблизи компоновки низа бурильной колонны. Циркуляция бурового раствора через гидравлический забойный двигатель вращает буровое долото.
Дополнительно, обсадные колонны меньшего диаметра могут быть установлены и зацементированы по месту с продолжением бурения скважины. Вновь, комплект инструментов, применяемых для бурения должен быть заменен комплектом для обсадной колонны меньшего диаметра. Кроме того, может быть установлен хвостовик, который является обсадной колонной, не надставляемой до оборудования устья скважины, подвешиваемый на нижнем конце обсадной колонны, подвешенной ранее.
Могут быть выполнены боковые стволы, отходящие от основной скважины, с применением таких инструментов, как как фрезеры для прорезания окна в обсадной колонне и скважинные отводное устройствои. Боковые стволы могут проходить несколько километров от основной скважины.
Во время бурения, могут требоваться специальные инструменты, такие, например, как инструмент непрерывной циркуляции, показанный в публикациях WO-98/16716 и WO 2009/093069. Данные инструменты подают на буровой пол и устанавливают по центру устья скважины. Инструмент непрерывной циркуляции затем соединяют в бурильную колонну между буровым полом и верхним переводником, соединенным с верхним приводом. Данные инструменты обеспечивают непрерывную циркуляцию бурового раствора, когда бурильную трубу наращивают или убирают во время спускоподъемных операций и, таким образом поддерживают постоянное давление в ствол скважины.
Когда ствол скважины является достаточно длинным и глубоким и оценивается, достигший проектного места для добычи, скважина проходит фазу заканчивания. Данное может включать в себя закрепление перфорированной трубы. Кроме того, скважину могут затем очищать, применяя очищающие инструменты на конце бурильной колонны и приводить в готовность для приема нефти из пласта. В некоторых обстоятельствах, взрывчатые вещества (ВВ) могут быть спущены в ствол скважины для создания притока нефти, что включает в себя применение некоторого числа блоков специализированного оборудования на буровом полу по центру устья скважины. Скважину затем ввводят в фазу эксплуатации.
Во время фазы эксплуатации могут выполняться различные работы, такие как капитальный ремонт и обработка приствольной зоны для интенсификации притока для получения большего объема нефти из скважины. Данные работы можно выполнять, применяя гибкую насосно-компрессорную трубу и инструменты, соединенные с ней. Данные работы можно выполнять с оборудования устья скважины или бурового пола. Следовательно требуется барабан с гибкой насосно-компрессорной трубой и отклоняющий инструмент для осуществления прохода гибкой насосно-компрессорной трубы в обсаженный ствол скважины.
Следовательно бурильную колонну могут часто спускать в скважину и поднимать из скважины между данными работами.
Изобретатели обнаружили, что имеется значительное ʺвремя работы без углубления забояʺ при подготовке бурового пола для различных операций буровой установки, таких как бурение, строительство обсадной колонны, заканчивание, эксплуатация, текущий и капитальный ремонт скважины и обработка для интенсификации притока. Кроме того, изобретатели обнаружили, что имеется значительное время работы без углубления забоя при подготовке бурового пола для специальных процедур, таких как непрерывная циркуляция, цементирование, извлечение прихваченных инструментов, установка противововыбросовых пресенторов, установка райзеров, строительство обсадной колонны, заканчивание и т.д. Указанное является особенно, но не исключительно релевантным в системе вышки для бурения двух скважин одновременно, где работы переключаются с бурения на строительство обсадной колонны для заканчивания и т.д., очень быстро и часто, таким образом много время теряется, как ʺвремя работы без углубления забояʺ, когда изменяют конфигурацию инструментов на одном из центров устья скважины, работу на другом из центров устья скважины вынуждены прекращать.
Изобретатели имеют также заметили, что если инструмент, применяемый на буровом полу, выходит из строя, работу буровой установки вынуждены прекращать на время, пока персонал извлекает и заменяет вышедший из строя инструмент. Может возникать значительное непроизводительно время.
Согласно настоящему изобретению, предложена система для перемещения предметов на буровом полу, система содержит множество модульных оснований и сеть рельсов для направления множества модульных оснований, где каждое модульное основание из множества модульных оснований служит для опоры на него предмета, и каждое модульное основание имеет элементы для сцепления с рельсами, служащие для сцепления по меньшей мере с одним рельсом из сети рельсов.
Настоящее изобретение также предлагает систему для перемещения предметов на буровом полу, причем система содержит множество средств размещения и сеть направляющих средств для направления множества средств размещения, каждое средство размещения из множества средств размещения предназначено для опоры на него предмета, и каждое средство размещения имеет элементы сцепления с направляющим средством для сцепления по меньшей мере с одним направляющим средством сети направляющих средств. Средство размещения может представлять место любому инструменту или предмету, который требует перемещения по буровому полу и, в особенности, но не исключительно, к центру устья скважины и от него и может располагаться между центром устья скважины и одним из множества частей бокового ограждения буровой.
Настоящее изобретение также предлагает способ компоновки предметов на буровом полу, в котором обеспечено множество модульных оснований и сеть рельсов для направления множества модульных оснований, причем каждое модульное основание имеет элементы для сцепления с рельсами, служащие для сцепления по меньшей мере с одним рельсом из сети рельсов, способ содержит этапы перемещения предмета на модульном основании из множества модульных оснований по меньшей мере по части бурового пола.
Настоящее изобретение также предлагает буровой пол, имеющий сеть рельсов и множество модульных оснований, причем каждое модульное основание из множества модульных оснований служит опорой для предмета, и каждое из множества модульных оснований имеет элементы для сцепления с рельсами. Каждое модульное основание может включать в себя конструкцию, такую как стальные, алюминиевые, композитные или пластиковые рычаги, корзины, ступени, подпорки, полки или рамы для несения конкретного предмета. Каждое модульное основание может перемещаться по всей сети рельсов, хотя каждое модульное основание может использовать только часть сети рельсов. Наиболее интенсивное использование может приходиться на часть сети рельсов, расположенную вблизи центра устья скважины. Сеть рельсов может включать в себя множество боковых участков для постоянного или временного хранения конкретного модульного основания.
Настоящее изобретение также предлагает буровой пол, имеющий множество модульных оснований и сеть рельсов для направления множества модульных оснований, причем каждое модульное основание из множества модульных оснований предназначено для опоры на него предмета, и каждое модульное основание имеет элементы для сцепления с рельсами, служащие для сцепления по меньшей мере с одним рельсом из сети рельсов.
Таким образом, предметы, такие как скважинные инструменты и оборудование, не имеют одной выделенной фиксированной позиции, но устанавливаются там где это наиболее целесообразно для предстоящей работы. В случае, если бурильщик заменяет инструменты на буровом полу, инструменты могут быть установлены в готовности для следующей работы, которую бурильщик собирается выполнять.
Если необходимо, модульное основание является самоходным. Если необходимо, по меньшей мере одно из множества модульных оснований содержит движитель для перемещения модульного основания по сети рельсов. Движитель может быть гидравлическим и получать энергию из источника гидравлической энергии, установленного на буровой установке, на расстоянии от модульного основания, или модульное основание может включать в себя гидравлический насос. Если необходимо, движитель может дополнительно содержать источник электропитания, который может являться батареей, установленной на модульном основании или на буровой установке или на расстоянии от модульного основания для питания гидравлического насоса. Если необходимо, движитель содержит циклически действующую лапу. Если необходимо, лапа применяетcя, чтобы избирательно толкать или тянуть модульное основание по сети рельсов. Если необходимо, циклически действующая лапа содержит захватный механизм, который избирательно захватывает и высвобождает рельс сети рельсов. Если необходимо, циклически действующая лапа содержит ногу, имеющую по меньшей мере один шарнирный узел. Если необходимо, циклически действующая лапа имеет гидравлический привод. Если необходимо, каждое модульное основание снабжено двумя циклически действующими лапами, если необходимо, одной для работы в первом направлении и другой для работы в перпендикулярном направлении, расположенными в плоскости, совпадающей с сетью рельсов. Если необходимо, модульное основание имеет гибкую гидравлическую линию, прикрепленную к нему для снабжения энергией движителя. Если необходимо, модульное основание снабжено катушкой гидравлического шланга. Если необходимо, буровой пол содержит множество точек подключения для подачи рабочей жидкости гидросистемы в сети рельсов. Если необходимо, гидравлический шланг имеет один конец, снабженный соединителем, причем модульное основание содержит перемещающееся средство, такое как толкатель, пружина или шарнирный рычаг для вставления соединителя в одну из точек подключения к трубопроводам гидравлической системы. Если необходимо, циклически действующая лапа взаимодействует с полом и создает реактивную силу в упор к полу, чтобы толкать модульное основание по меньшей мере по одному рельсу. Если необходимо, рельс имеет широкую верхнюю часть, достаточную для обеспечения сцепления циклически действующей лапы, чтобы толкать модульного основание по нему. Если необходимо, рельс имеет двутавровое сечение.
Если необходимо, сеть рельсов выполняют в виде решетки, образующей решетку рельсов. Если необходимо, сеть рельсов содержит пару параллельных рельсов, по которым направляют множество модульных оснований. Если необходимо, части пола выполняют в площади, образованной решеткой рельсов. Если необходимо, части пола являются съемными. Если необходимо, части пола являются фиксированными. Дополнительно, большинство частей пола подходят для хождения по ним персонала буровой установки.
Если необходимо, сеть рельсов содержит пересекающиеся продольные рельсы и поперечные рельсы. Если необходимо, имеется зазор в продольном рельсе и зазор в поперечном рельсе на пересечении. Если необходимо, по меньшей мере один элемент для сцепления с рельсом содержит башмак, имеющий участок юбки образующий продольный канал. Если необходимо, участок юбки дополнительно образует поперечный канал. Если необходимо, участок юбки содержит участок для зацепления по меньшей мере участка рельса. Если необходимо, продольный рельс и поперечный рельс пересекаются под прямыми углами, хотя могут пересекаться под другими углами между 10 и 80 градусов или между 25 и 65 градусов. Если необходимо, башмаки являются подкладными башмаками. Если необходимо, подкладной башмак имеет внутренний облицовочный элемент с поверхностью низкого трения, чтобы легче толкать и тянуть модульное основание. Если необходимо, каждое модульное основание снабжено четырьмя такими башмаками. Если необходимо, модульное основание является, по существу, квадратным, если необходимо, имеет башмак на каждом углу или вблизи каждого угла.
Если необходимо, по меньшей мере один рельс несет модульное основание. В большинстве случаев, если необходимо, вес модульного основания и предмета на модульном основании воспринимает, по существу, или в целом по меньшей мере один рельс или пара рельсов. Альтернативно, в целом вес или часть веса модульного основания воспринимает буровой пол и рельс применяется для направления модульного основания.
Если необходимо, рельсы установлены в буровом полу, если необходимо, так, что рельсы, по существу, располагаются в одной плоскости с буровым полом. Указанное может уменьшать шансы персонала буровой установки задевать за рельс. Указанное может уменьшать ударные повреждения и износ рельсов, поскольку рельс, по существу, защищен или закрыт со стороны нижней поверхности и боковых поверхностей.
Если необходимо, сеть рельсов дополнительно содержит по меньшей мере одно заданное место стоянки. Если необходимо, заданное место стоянки содержит физическое средство, приводимое в действие по достижении места стоянки, для обеспечения физической индикации, что модульное основание закреплено на месте установки. Если необходимо, буровой пол, имеет одно из установочного штифта и установочного отверстия на заданном месте стоянки, и по меньшей мере одно из модульных оснований имеет другое из установочного штифта и установочного отверстия, так что при применении одно из установочного штифта и установочного отверстия перемещается для установки установочного штифта в установочном отверстии. Установочный штифт может быть подпружиненной собачкой и вместо отверстия, на буровом полу может быть обеспечен поднятый вверх зуб, при этом подпружиненная собачка блокируется поднятым вверх зубом, когда модульное основание перемещается на место стоянки. Если необходимо, предусмотрен стояночный датчик, такой как считывающее идентификационную метку устройство, для передачи сигнала в центральную систему управления для указания, что модульное основание закреплено на заданном месте стоянки. Если необходимо, буровой пол смежный с установочным отверстием снабжен идентификационной меткой, которую считывает считывающее идентификационную метку устройство на модульном основании. Альтернативно, идентификационная метка расположена на модульном основании, и считывающее идентификационную метку устройство расположено в буровом полу на месте стоянки. Такие идентификационная метка и считывающее идентификационную метку устройство могут быть: меткой RFID и считывающим идентификационную метку RFID устройством; может применятьcя оптическая система, такая как штриховой код и считывающее штриховой код устройство или QR-код и считывающее QR-код устройство; или может применятьcя идентификационная метка с применением высоких или низких частот с соответствующими считывающими высокие и низкие частоты устройствами. Идентификационные метки могут иметь электропитание или быть пассивными. Возможно расположение, заданного места стоянки по меньшей мере на одном из следующих мест: на центре устья скважины для установки модульных оснований предметов, таких как модульные основания инструмента на центре устья скважины, который могут удерживать или могут не удерживать модульное основание в процессе применения инструмента или предмета; непосредственно вблизи центра устья скважины для разгрузки предметов с модульного основания на центр устья скважины; на месте вблизи центра устья скважины для осуществления разгрузки других предметов с применением модульного основания крана, или инструментов для манипуляций с трубой, обсадной колонной и райзером или для инструментов соединения трубы, обсадной колонны и райзера, таких как устройство для механизированной подвески и развинчивания труб; на подъемнике модульных оснований; в зоне хранения. В центральную систему управления отправляют пакет информации с процессора системы управления закреплением на месте установки, установленного на модульном основании. Процессор системы управления закреплением на месте установки может являться частью управляющего модульным основанием компьютера. Пакет информации содержит по меньшей мере одну из следующих частей информации: идентификационный код, идентифицирующий тип модульного основания, такой как модульное основание отводного устройства или модульное основание спайдера; данные по присутствию или отсутствию предмета, такого как спайдер и отводное устройство на модульном основании; информация о предмете, такая как размер, тип, история предыдущей работы, текущие неисправности и предыдущие неисправности; ориентация модульных оснований; и информация о местоположении места стоянки модульного основания, на котором модульное основание установлено и закреплено.
Идентификационный код, идентифицирующий тип модульного основания, такого как модульное основание отводного устройства или модульное основание спайдера, если необходимо, программируют в управляющий закреплением на месте установки компьютер.
Информация, связанная с предметом, таким как спайдер и отводное устройство находится на модульном основании и вне его; информацию о предмете, такую как размер, тип, история предыдущей работы, текущие неисправности и предыдущие неисправности, если необходимо, получают с помощью считывающего устройства RFID-метки на модульном основании и по меньшей мере одной RFID-метки и, если необходимо, резервной RFID-метки на предмете, содержащей информацию о предмете, такую как размер, тип, история предыдущей работы, текущие неисправности и предыдущие неисправности.
Центральная компьютерная система управления принимает такие пакеты информации для всех модульных оснований на сети рельсов. Центральную компьютерную систему управления программируют информацией о схеме размещения инструментов и оборудования для различных стандартных операций, таких как: бурение; операции спуска в скважину; операции подъема из скважины; спуск обсадной колонны; цементирование обсадной колонны; заканчивание скважины; и капитальный ремонт. Центральная система управления поэтому способна управлять всеми модульными основаниями, применяя пакеты информации. Бурильщик или буровой мастер обеспечен в кабине бурильщика интерфейсом центральной системы управления, таким как окно на сенсорном экране. Бурильщику предлагается перечень кнопок, где каждая кнопка предназначена для операции, такой как бурение; операции спуска в скважину; операции подъема из скважины; спуск обсадной колонны; цементирование обсадной колонны; заканчивание; и капитальный ремонт. Бурильщик нажимает нужную кнопку, такую как ʺбурениеʺ и центральная компьютерная система управления должна передавать сигналы модульным основаниям для управления каждым модульным основание для перемещения на позиции заданных мест установки и закрепления на буровом полу для выполнения бурения. Например, для бурения: центр устья скважины должен быть освобожден; спайдер, подходящий для бурильной трубы, должен быть установлен на центре устья скважины с помощью крана для перемещения спайдера в центр устья скважины; кран должен быть выведен из зоны хранения; модульное основание устройства для механизированной подвески и развинчивания труб должно быть установлено на заданном месте стоянки вблизи центра устья скважины; модульное основание манипулятора для хвостовой части трубы должно быть установлено на заданном месте стоянки вблизи центра устья скважины.
Если необходимо, буровой пол содержит одно из установочного штифта и установочного отверстия на заданной точке и по меньшей мере одно из модульных оснований имеет другое из установочного штифта и установочного отверстия, так что при применении одно из установочного штифта и установочного отверстия перемещается для установки установочного штифта в установочном отверстии. Когда установочный штифт вошел в установочное отверстие, точное местоположение модульного основания известно и, таким образом, инструмент на модульном основании, таком как модульное основание устройства для механизированной подвески и развинчивания труб, может работать на заданной позиции.
Если необходимо, сеть рельсов содержит по меньшей мере одно и если необходимо множество из следующего: Т-образное разветвление; пересечение путей; и угол поворота. Все рельсы могут являться прямыми, линейными. Если необходимо, рельсы проходят по кривой в горизонтальной плоскости для образования поворотов.
Если необходимо, сеть рельсов содержит вертикально перемещающуюся часть рельса. Если необходимо, вертикально перемещающаяся часть рельса выполнена с размерами, обеспечивающими перемещение модульного основания между буровым полом и уровнем ниже или выше его. Если необходимо, выполняют лифтовую часть пола, расположенную между или вблизи такого рельса.
Возможна установка бурового пола на сухопутной или морской буровой установке. Возможна установка бурового пола на одном из следующего: буровое судно; плавучий нефтекомплекс FPSO; буровая морская платформа, такая как платформа SPAR, SWATH, Seаstar и платформа с натяжными опорами; а также на сухопутной буровой установке.
Настоящее изобретение также предлагает модульное основание для применения на буровом полу изобретения, причем модульное основание содержит основание, механизм продвижения и башмак для сцепления с рельсом.
Если необходимо, модульное основание также содержит на себе катушку гидравлического шланга. Если необходимо, катушка имеет систему автоматического наматывания, при этом гидравлический шланг остается натянутым между катушкой и точкой подключения.
Если необходимо, модульное основание также содержит на себе катушку электрического кабеля. Если необходимо, катушка имеет систему автоматического наматывания, при этом электрический кабель остается натянутым между катушкой и точкой подключения. Если необходимо, модульное основание является самоходным, с электрическим двигателем, и электрический кабель подает достаточный ток для питания электрического двигателя. Если необходимо, электрический двигатель и электрические соединения, применяемые между электрическим кабелем и электрическим двигателем, имеют взрывобезопасное исполнение или размещены во взрывобезопасных кожухах, подходящих для применения на буровых полах.
Если необходимо, модульное основание приподнимается с применением магнитного поля, и компонента силы, созданной магнитным поле или отдельным приводным средством, таким как электрический двигатель, приводящий в движение колесо, перемещающееся по буровому полу или по рельсу.
Каждое модульное основание, такое как модульное основание гибкой насосно-компрессорной трубы, модульное основание трубного манипулятора, модульное основание устройства для механизированной подвески и развинчивания труб, модульное основание стрелы манипулятора для райзера и модульное основание кабины бурильщика, если необходимо снабжено, по меньшей мере одним из следующего: самоходная система; стояночная система; автоматический система подключения; и автоматический система управления. Если необходимо, система продвижения приводится в действие гидравлически, и гидравлические силовые линии и каналы связи для приводного вращения барабана обеспечены через вспомогательную линию на модульном основании, которая ответвляется от объединенных шланга подачи рабочей жидкости гидросистемы и линии связи, таким образом дополнительное подключение не требуется.
Кабина бурильщика является кабиной с большим окном, в которой сидят бурильщик и буровой мастер для управления буровой установкой. Изобретатели установили, что предпочтительно иметь кабину бурильщика на месте вблизи центра устья скважины, при этом бурильщик и буровой мастер могут ясно видеть происходящее на центре устья скважины. Вместе с тем, при размещении очень близко к центру устья скважины кабина бурильщика занимает ценное пространство буровой установки вблизи центра устья скважины, так что кабину бурильщика можно располагать на некотором месте вблизи центра устья скважины во время одних операций, но отводить на некоторое расстояние от него во время других операций. Кроме того, если имеет место нештатная ситуация на буровой установке, ее возникновение весьма вероятно на центре устья скважины, в особенности, во время некоторых операций.
Согласно второму аспекту изобретения, предложена буровая установка, содержащая буровой пол и кабину бурильщика, при этом кабина бурильщика содержит подвижное средство для перемещения по буровому полу. Если необходимо, кабина бурильщика установлена на модульное основание. Если необходимо, модульное основание снабжено перемещающим средством для перемещения кабины бурильщика по буровому полу. Если необходимо, буровой пол снабжен сетью рельсов, при этом буровой пол может перемещаться вместе с сетью рельсов.
С полностью автоматизированный системой настоящего изобретения является возможной замена инструментов и других предметов и оборудование, такого как грузоподъемное оборудование, которое сломалось или неисправно, и его возврат в мастерскую и замена без отвлечения персонала буровой установки на буровом полу, при этом, нет неободимости останавливать работу в целом на буровом полу, что является особенно, но не исключительно важным для системы с вышки для строительства двух скважин одновременно.
Для лучшего понимания настоящего изобретения, ниже даны ссылки в виде примера на прилагаемые чертежи, на которых показано следующее.
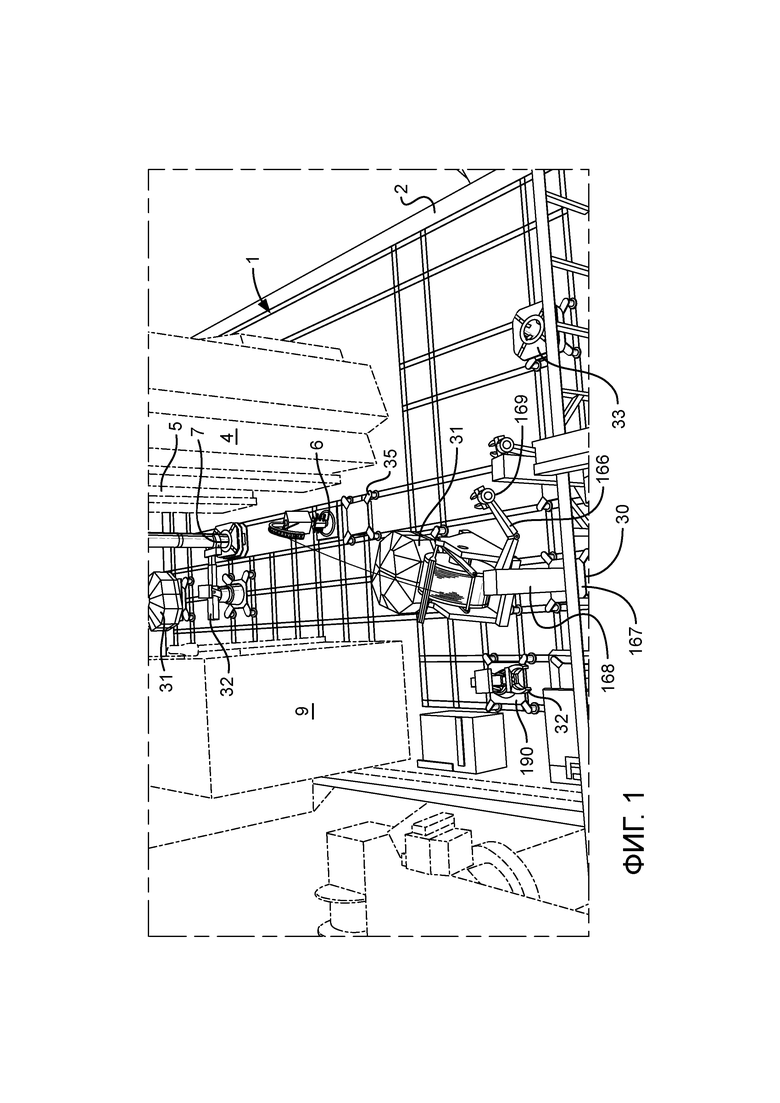
На фиг. 1 показан вид в перспективе части бурового судна, имеющего буровой пол согласно настоящему изобретению.
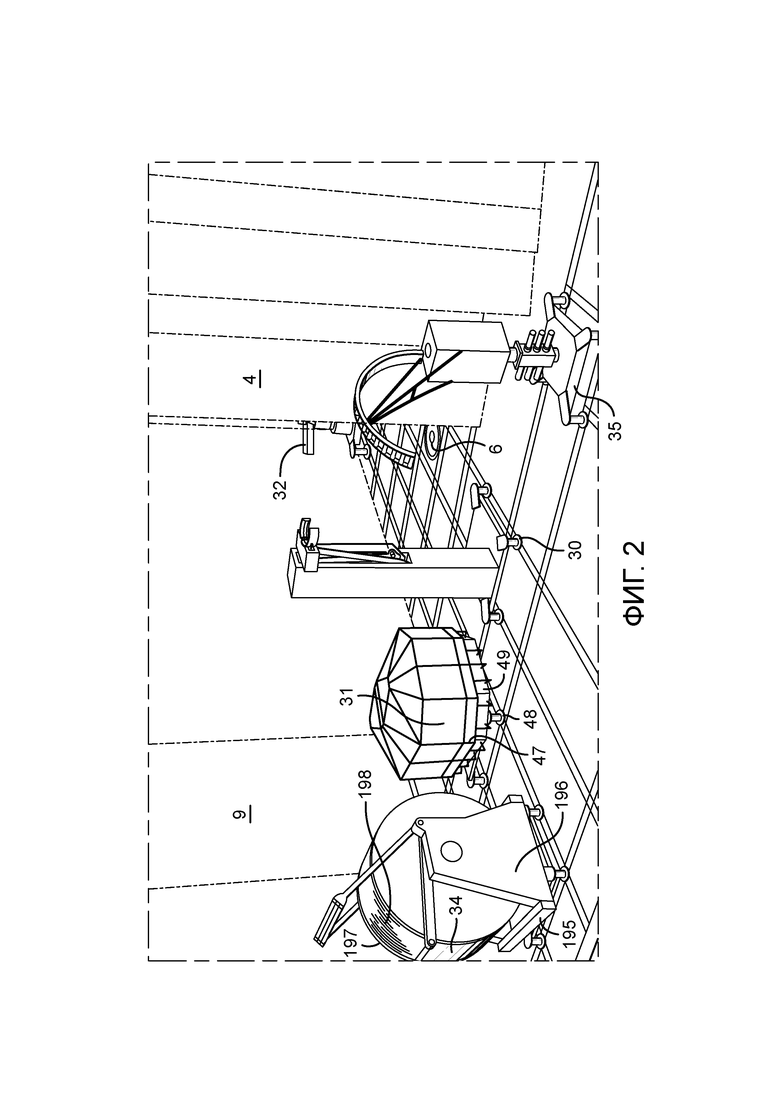
На фиг. 2 показан вид в перспективе бурового пола фиг. 1 на дополнительном этапе работы.
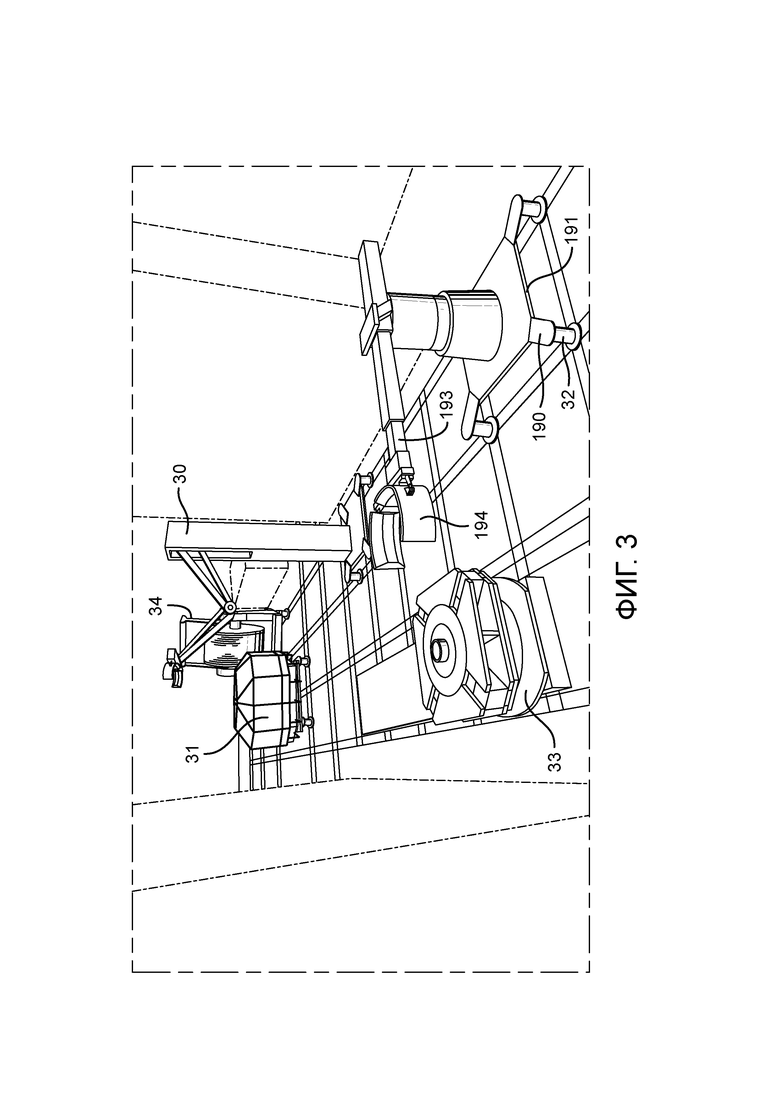
На фиг. 3 показан вид в перспективе бурового пола фиг. 1 на еще одном дополнительном этапе работы.
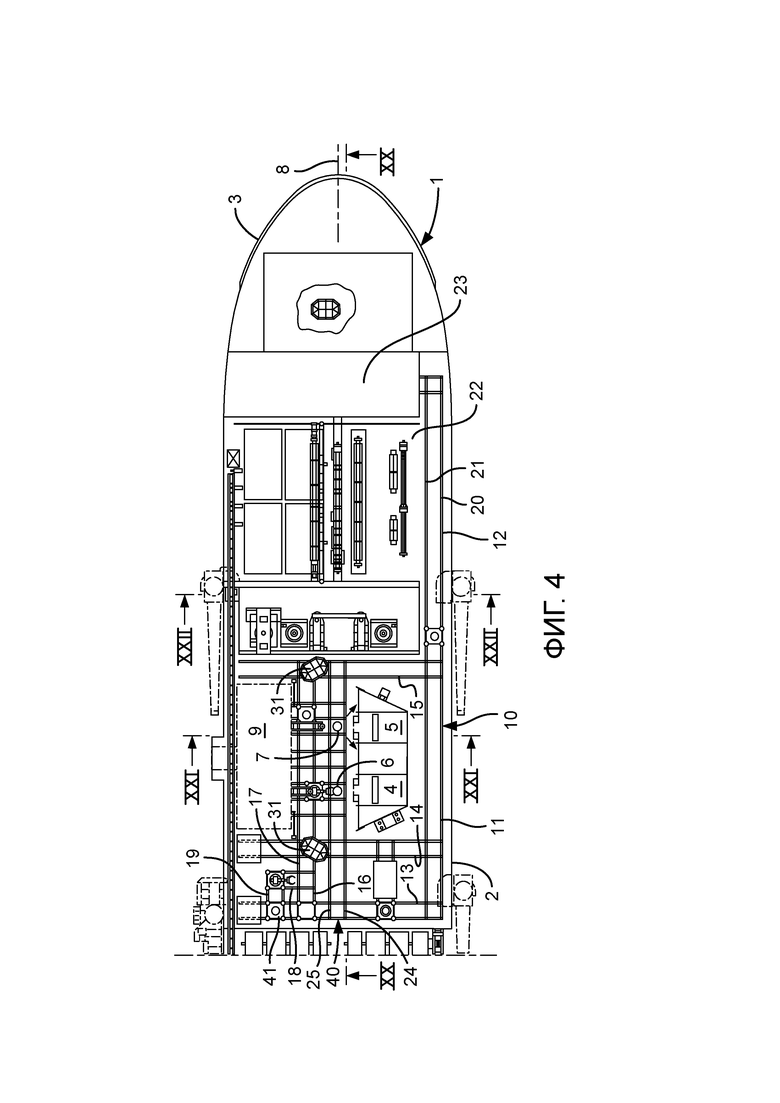
На фиг. 4 схематично показан вид сверху в плане части бурового судна фиг. 1, показана, помимо прочего, сеть рельсов и множество модульных оснований согласно настоящему изобретению.
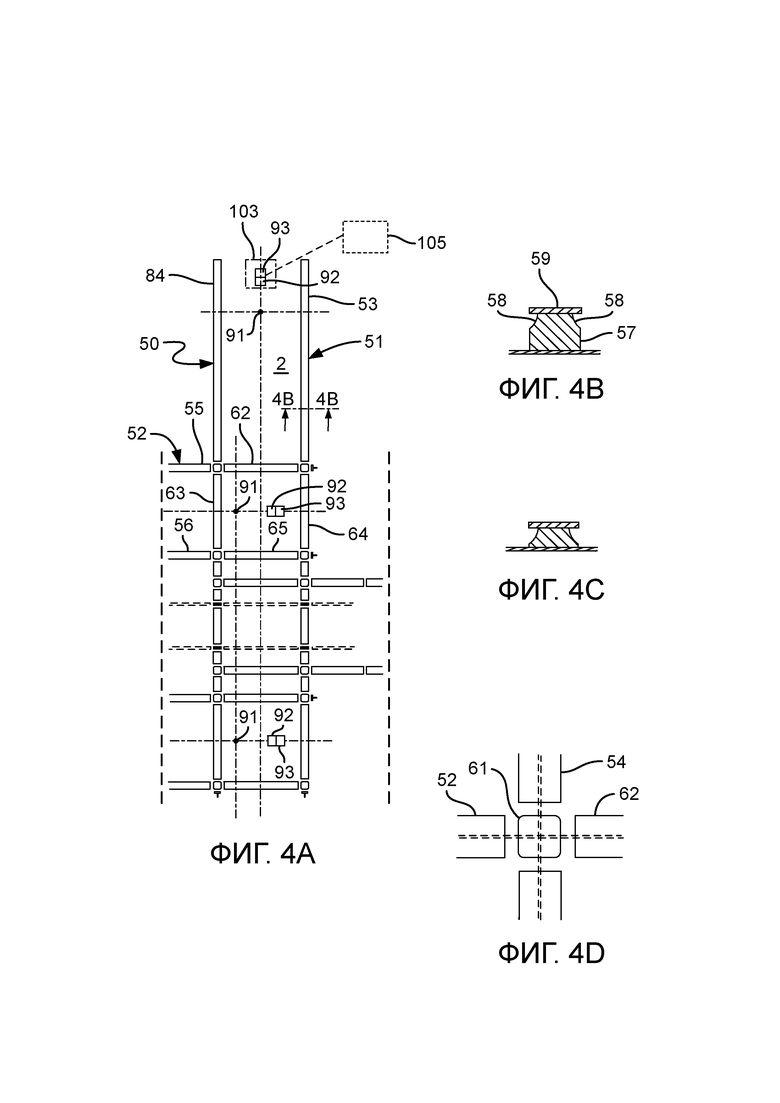
На фиг. 4А схематично показан с увеличением вид сверху в плане части бурового пола, помимо прочего, показана сеть рельсов фиг. 4.
На фиг. 4B показано сечение по линии 4B-4B рельса фиг. 4А сети рельсов бурового пола.
На фиг. 4C показано сечение рельса сети рельсов для применения на полу мастерской.
На фиг. 4D показан с увеличением вид сверху в плане продольного рельса, пересекающего поперечный рельс.
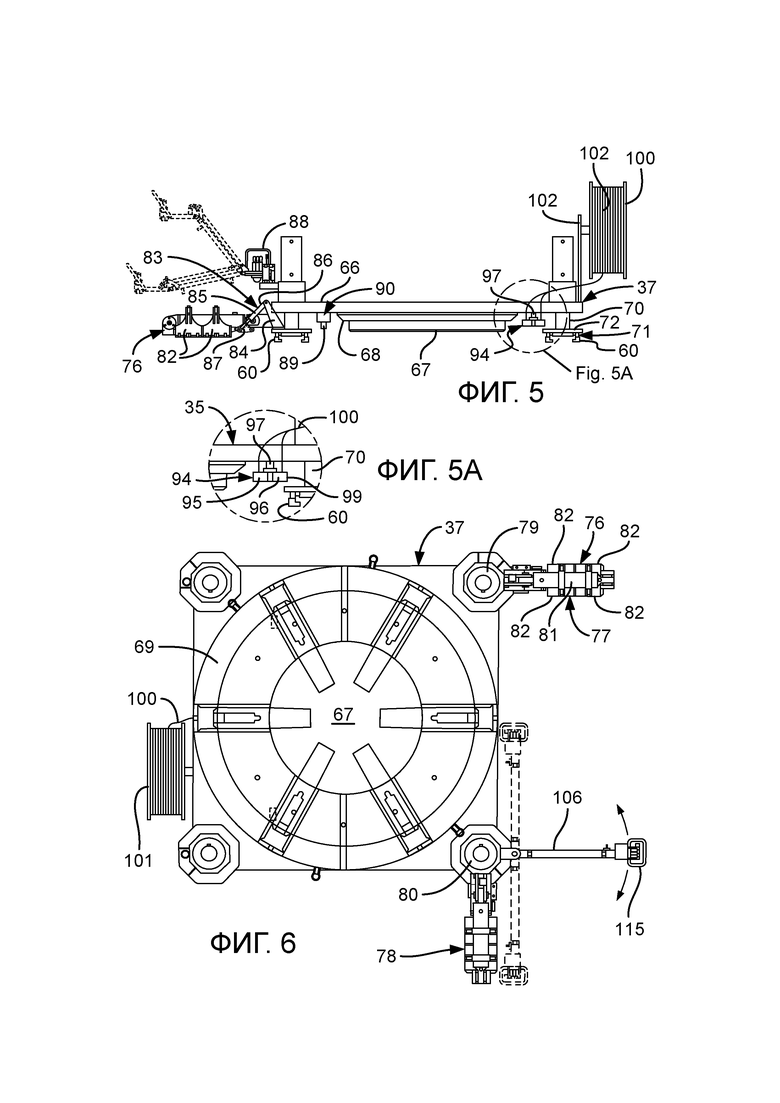
На фиг. 5 схематично показан вид сбоку модульного основания спайдера для перемещения спайдера; на фиг. 5A показан с увеличением вид части модульного основания спайдера фиг. 5.
На фиг. 6 показан вид в плане сверху модульного основания спайдера фиг. 5 со спайдером на нем.
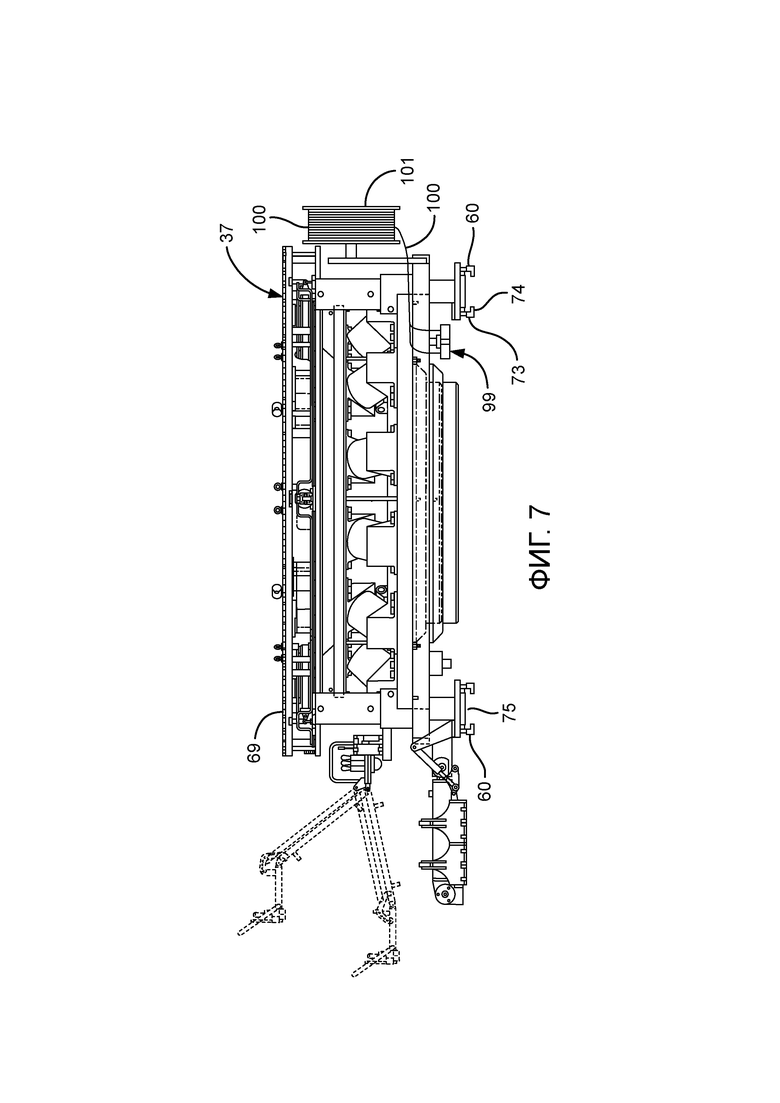
На фиг. 7 схематично показан вид сбоку модульного основания спайдера фиг. 5 со спайдером на нем.
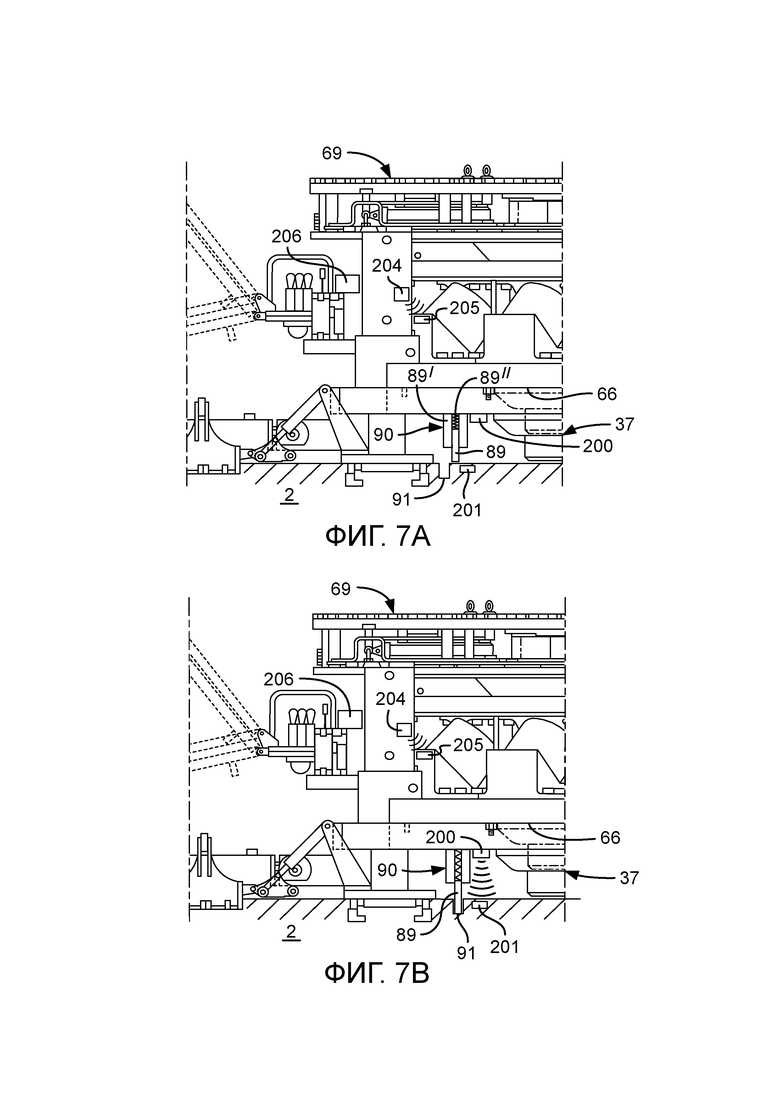
На фиг. 7A показана часть спайдера и модульного основания спайдера фиг. 5 в первом положении применения на буровом полу во время перемещение к месту стоянки (рельсы не показаны для ясности).
На фиг. 7B показана часть спайдера и модульного основания спайдера фиг. 5 в положении стоянки (рельсы не показаны для ясности).
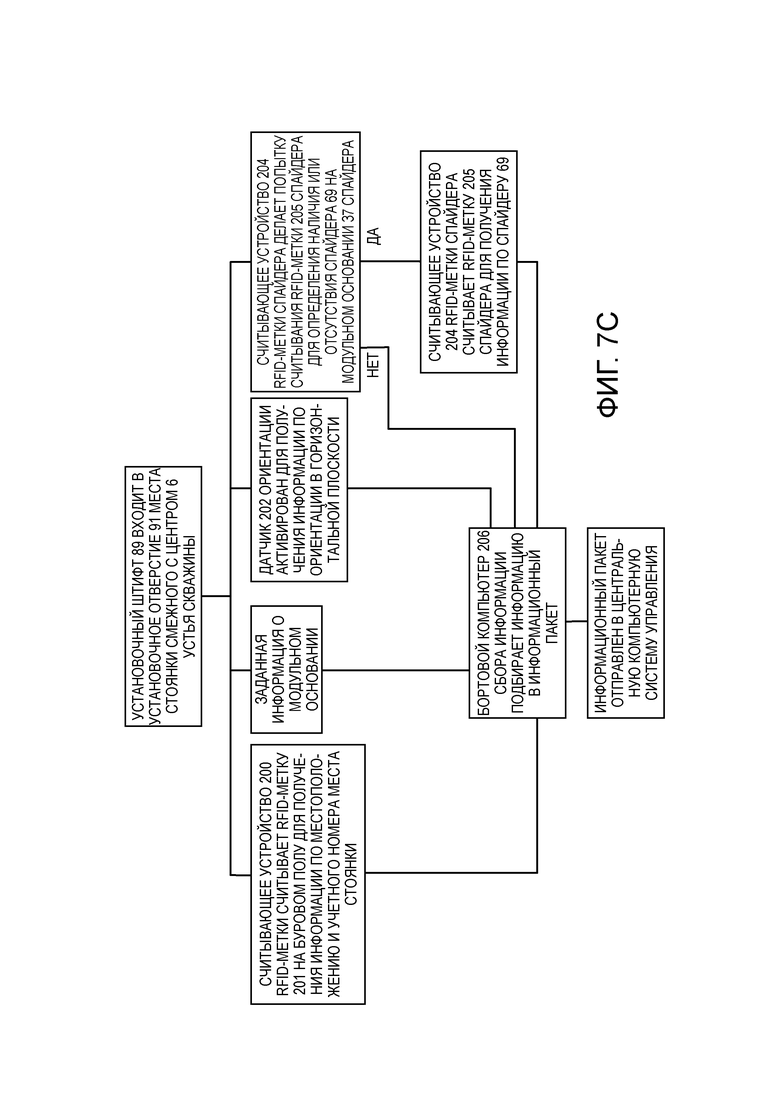
На фиг. 7C показана блок-схема работы системы управления согласно изобретению.
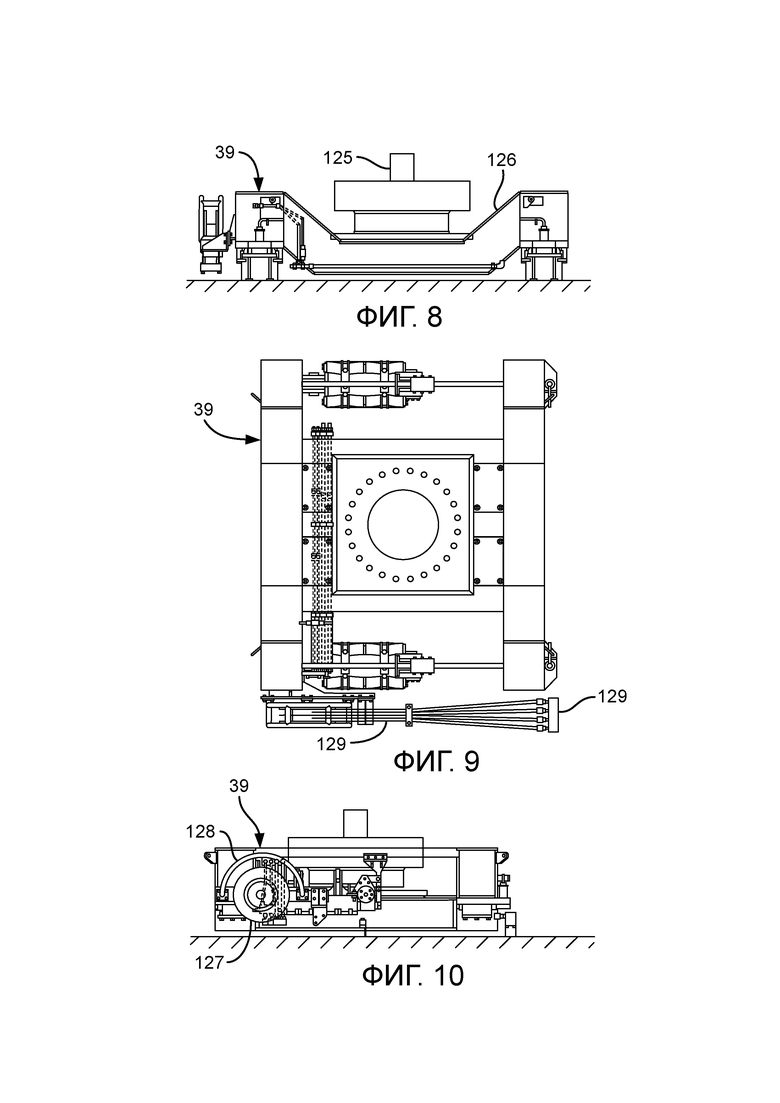
На фиг. 8 показан вид сбоку модульного основания испытательной тумбы противовыбросового превентора с испытательной тумбой противовыбросового превентора на нем.
На фиг. 9 показан вид в плане сверху модульного основания испытательной тумбы противовыбросового превентора фиг. 8 с испытательной тумбой на нем.
На фиг. 10 показан вид сбоку модульного основания испытательной тумбы противовыбросового превентора фиг. 8 с испытательной тумбой противовыбросового превентора на нем.
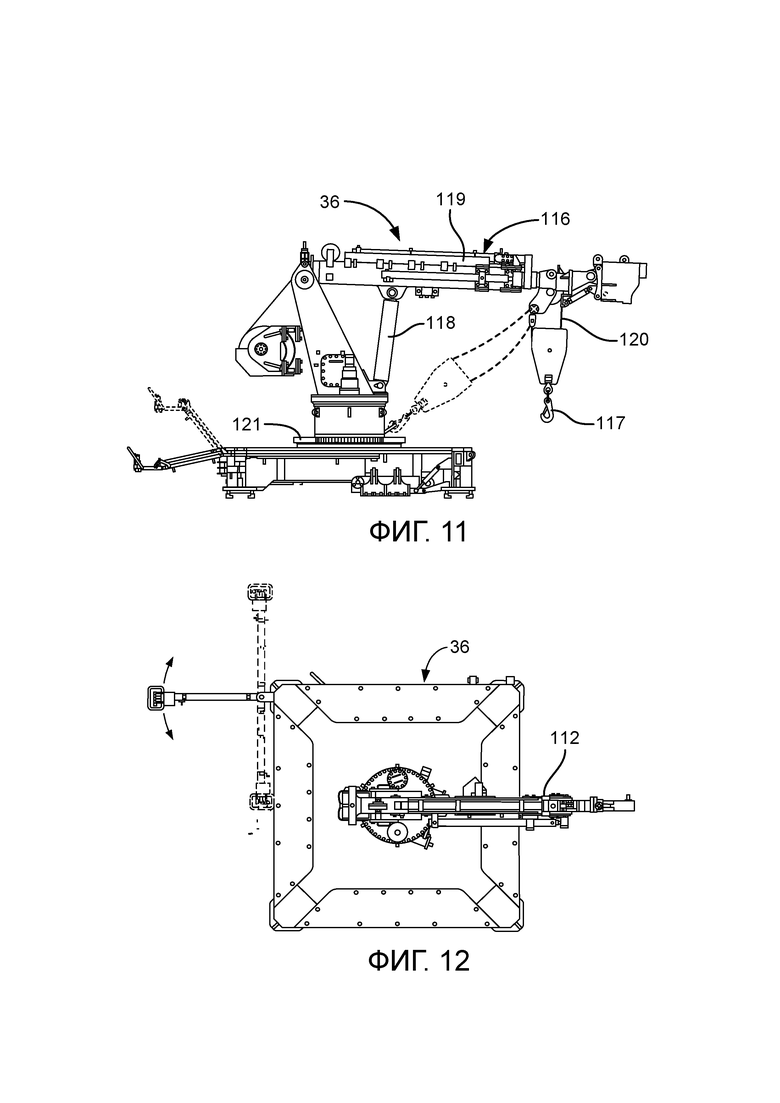
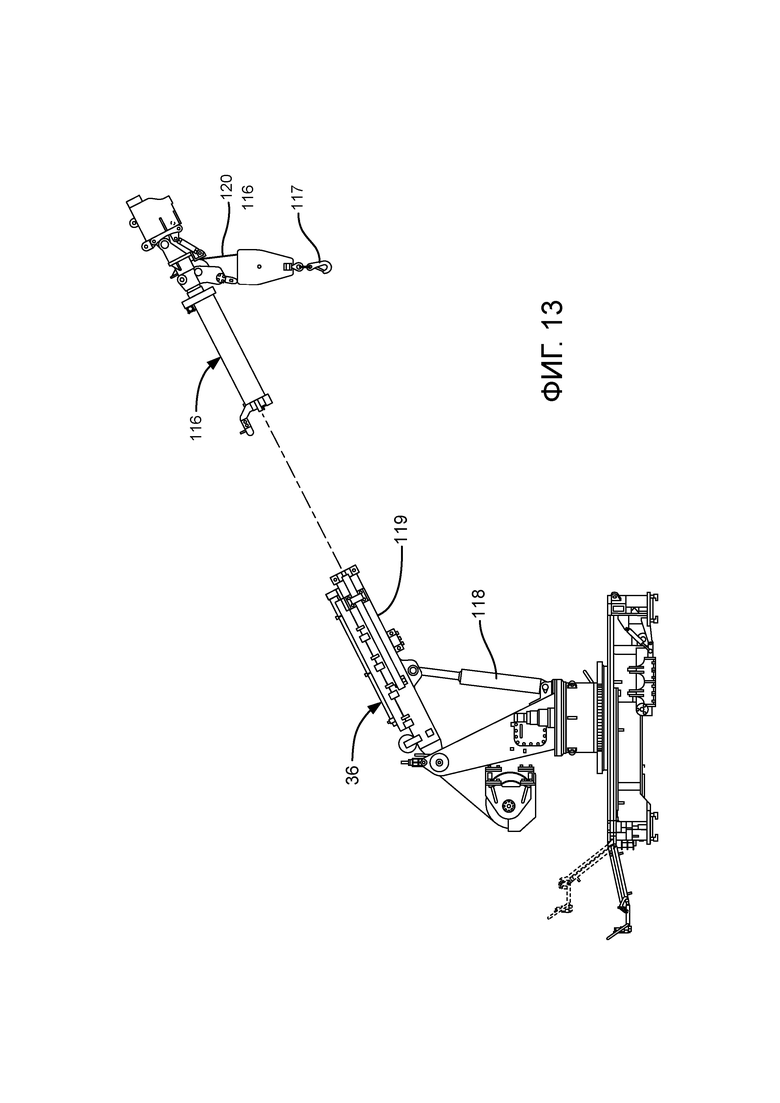
На фиг. 11 показан вид сбоку модульного основания крана с краном на нем на первом этапе работы.
На фиг. 12 показан вид в плане сверху модульного основания крана фиг. 11 с краном на первом этапе работы.
На фиг. 13 показан вид сбоку модульного основания крана с краном на втором этапе работы.
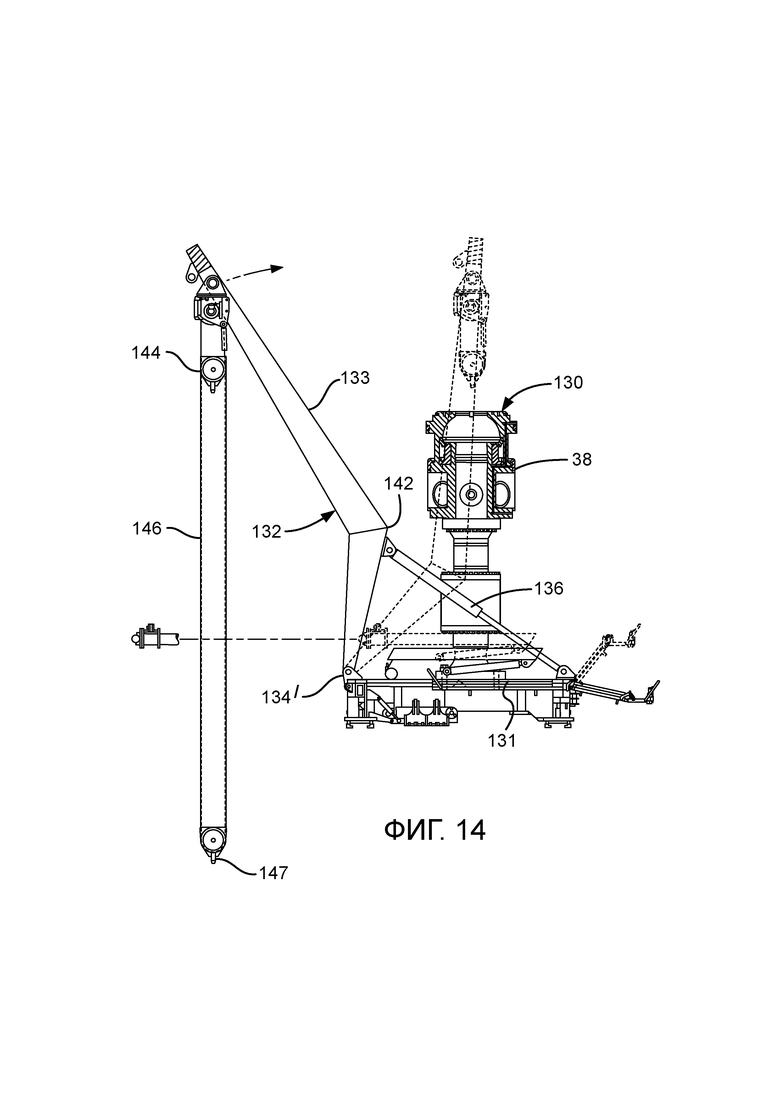
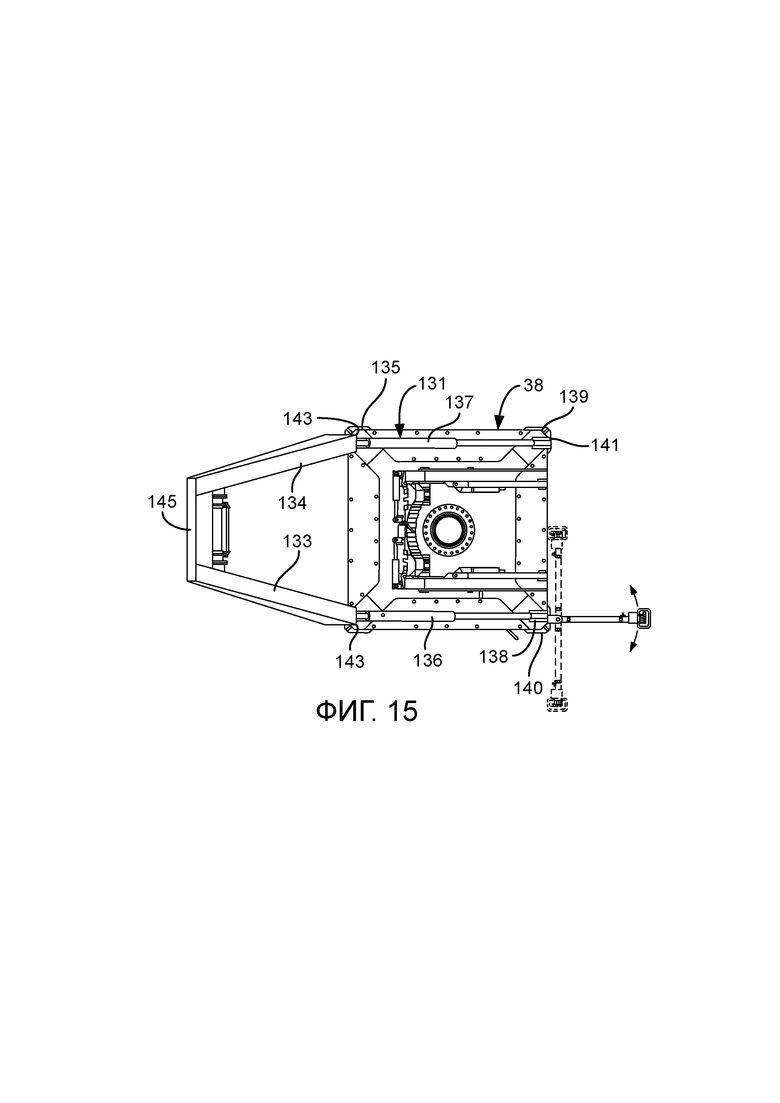
На фиг. 14 показан вид спереди модульного основания отводного устройства с отводным устройством, которое оно несет, показан первый и второй этап работы;
На фиг. 15 показан вид в плане сверху модульного основания отводного устройства с отводным устройством, которое оно несет.
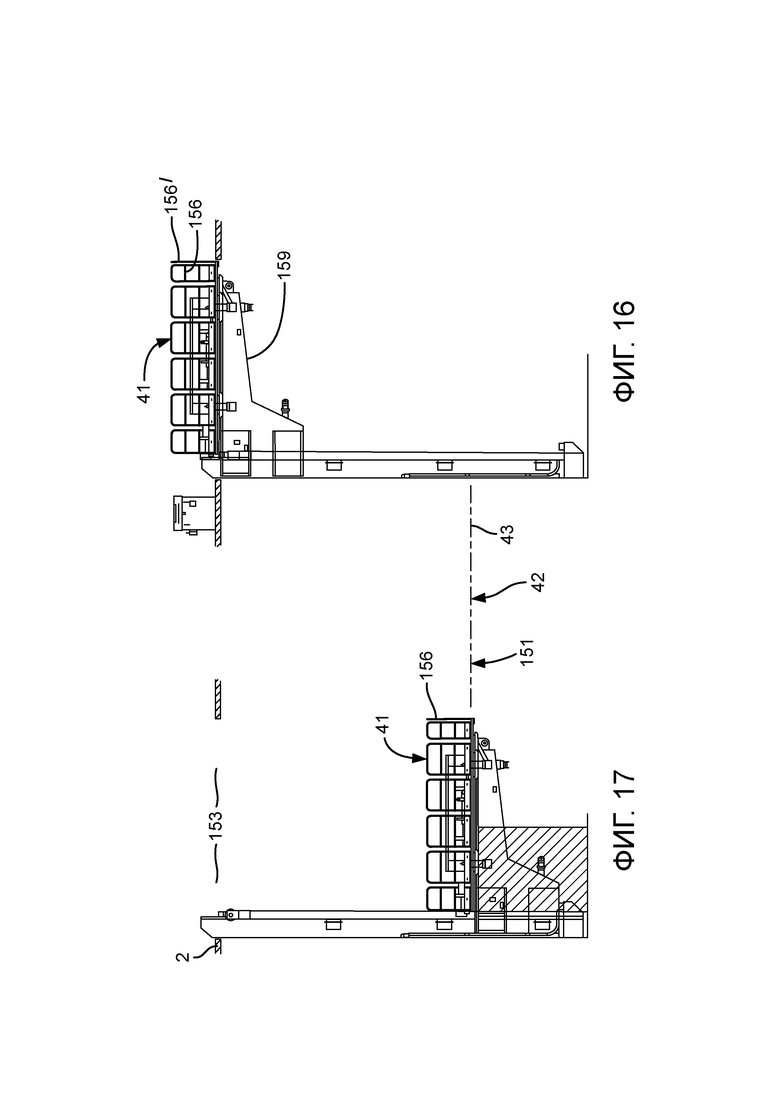
На фиг. 16 показан вид сбоку подъемника модульных оснований сети рельсов фиг. 4, с платформой подъемника модульных оснований в поднятом положении на уровне бурового пола.
На фиг. 17 показан вид сбоку подъемника модульных оснований сети рельсов фиг. 16, с платформой подъемника модульных оснований в опущенном положении на уровне пола мастерской.
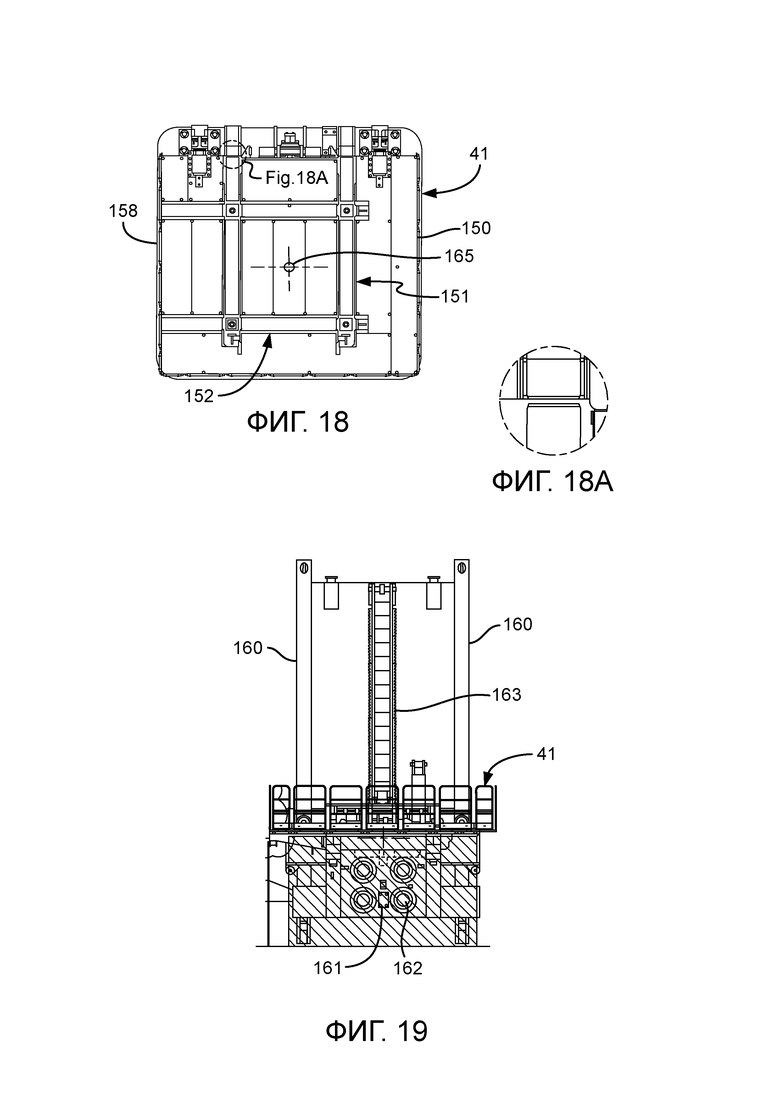
На фиг. 18 показан вид в плане сверху модульного основания платформы подъемника фиг. 16.
На фиг. 18A показана деталь части подъемника модульных оснований и пола мастерской.
На фиг. 19 показан вид спереди подъемника модульных оснований фиг. 16 с платформой подъемника модульных оснований в опущенном положении на уровне пола мастерской.
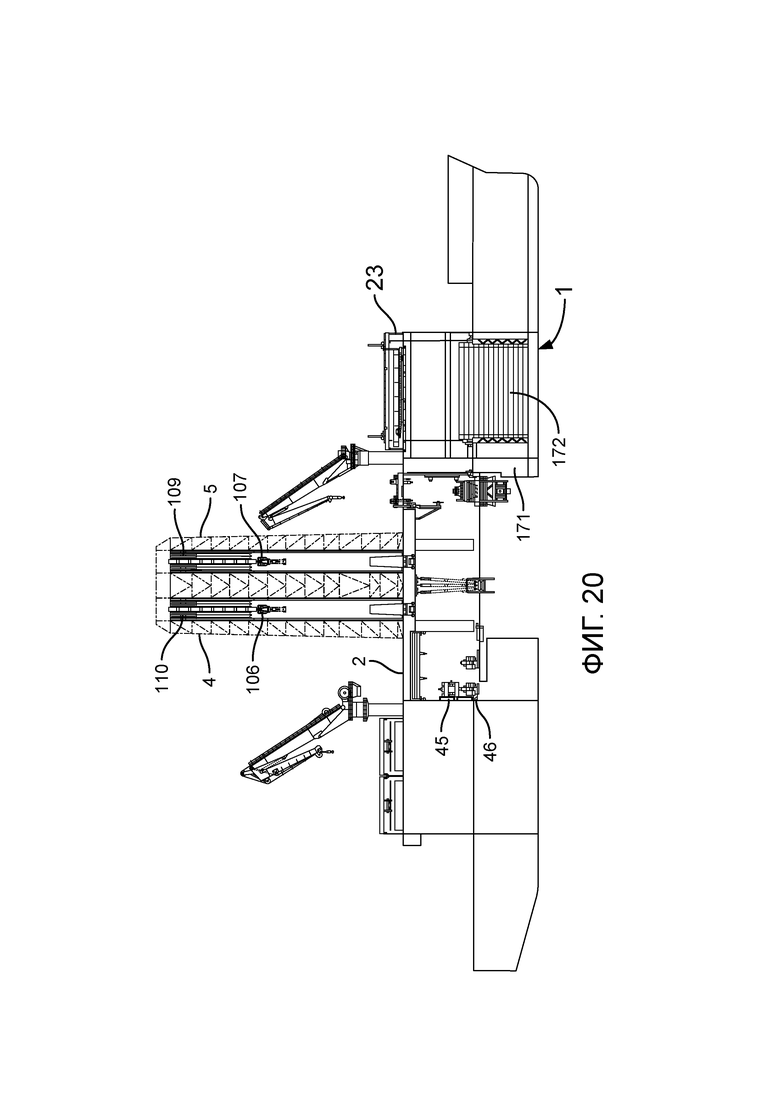
На фиг. 20 схематично показан вид сбоку бурового судна фиг. 4 с сечением по линии XX-XX.
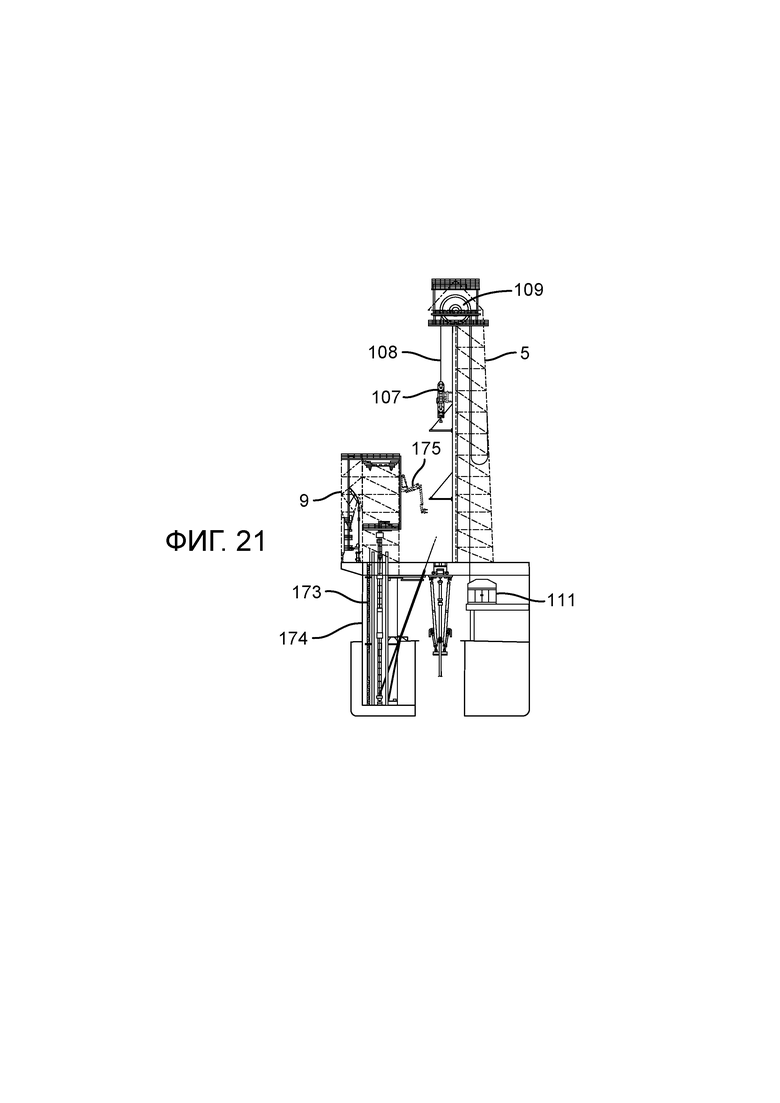
На фиг. 21 схематично показан вид сбоку бурового судна фиг. 4 с сечением о линии XXI-XXI.
На фиг. 1-4, показана часть бурового судна, в общем идентифицированная ссылочной позицией 1, имеющего буровой пол 2 согласно настоящему изобретению. Перспектива взята от кормы бурового судна 1 к носу 3. Буровое судно 1 имеет две вышки 4 и 5 расположенные ближе к правому борту бурового судна 1, каждая с соответствующим центром 6 и 7 устья скважины, расположенным, по существу, на осевой линии 8 бурового судна 1. Конструкция 9 подачи и скрепления труб расположена ближе к левому борту бурового судна 1. Буровой пол 2 расположен между и вокруг двух вышек 4 и 5. Буровой пол 2 окружает две вышки 4 и 5. Сеть рельсов 10 расположена в буровом полу 2. Сеть рельсов 10 содержит множество прямых рельсовых путей 11-19. Каждый из рельсовых путей 11-19 содержит множество пар рельсов, таких как пары рельсов 20, 21.
На фиг. 1-3 показано множество модульных оснований конкретных предметов изобретения на сети рельсов 10. Модульное основание 30 манипулятора для хвостовой части трубы, модульное основание 31 кабины бурильщика, модульное основание 32 стрелы манипулятора для райзера, модульное основание 33 бурового ротора, модульное основание 34 гибкой насосно-компрессорной трубы и модульное основание 35 инжектора гибкой насосно-компрессорной трубы для ремонта скважин.
Сеть рельсов 10 содержит рельсовые пути 11-19 со схемой расположения, которая должна быть подходящей для бурового пола на буровом судне 1. Все рельсовые пути 11-19 могут применятьcя для направления частных модульных основании между местами назначения. Вместе с тем, каждый рельсовый путь 11-19 имеет основной вариант применения.
Рельсовые пути 11 и 12, ведущие вокруг тыльной части вышек 4 и 5 и мимо площади 22 хранения скважинного инструмента применяютcя для перемещения конкретных модульных оснований от носовой площади 23 хранения бурового судна 1 до основного бурового пола 2.
Рельсовый путь 13 применяетcя главным образом, как площадь 40 для хранения модульных оснований предметов, которые могут применятьcя в предстоящих работах.
Рельсовый путь 14 применяетcя, главным образом, как путь доступа для направления модульных оснований от площади 40 хранения на центры 6 и 7 устья скважины или на места вблизи них. Рельсовый путь 14 также ведет к элеватору 44 устьевой фонтанной арматуры, установленному со стороны левого борта бурового пола 2. Устьевая фонтанная арматура 45 установлена на площади под буровым полом 2 на модульном основании 46 устьевой фонтанной арматуры.
Рельсовый путь 15 применяетcя, главным образом, как путь доступа для направления модульных оснований от носовой площади 23 хранения на центры 6 и 7 устья скважины или на места вблизи них. Рельсовые пути 14 и 15 также применяются для установки модульного основания 31 кабины бурильщика, которое обеспечивает бурильщику и буровому мастеру хороший обзор центров 6 и 7 устья скважины.
Рельсовый путь 16 применяетcя главным образом, как путь доступа для направления модульных оснований от площади 40 хранения и носовой площади 23 хранения к центрам 6 и 7 устья скважины и на них. Центры 6 и 7 устья скважины расположены между парой рельсов 24 и 25, которые образуют рельсовый путь 16. К модульным основаниям предметов, которые требуются на центре устья скважины, относятся: модульное основание 37 спайдера, модульное основание 38 отводного устройства, модульное основание 39 испытательной тумбы противовыбросового превентора, модульное основание системы непрерывной циркуляции (не показано) и модульное основание 33 бурового ротора.
Рельсовый путь 17 применяетcя, главным образом, как путь доступа для подведения модульных оснований конкретных предметов на места вблизи центра 6 и 7 устья скважины, при этом конкретные модульные основания предметов должны в общем оставаться на модульных основаниях на рельсовом пути 17, когда предмет эксплуатируют, например: модульное основание 30 манипулятора для хвостовой части трубы; модульное основание устройства для механизированной подвески и развинчивания труб (не показано); модульное основание трубного ключа для обсадной колонны (не показано); модульное основание 36 крана (показано на фиг. 11-13).
Рельсовые пути 18 и 19 применяютcя для направления модульных оснований предметов к подъемнику 41 модульных оснований. Подъемник 41 модульных оснований поднимает и опускает модульные основания предметов между буровым полом 2 и полом 42 мастерской. Предметы и модульные основания предметов, подлежащие ремонту и техобслуживанию, должны перемещаться по рельсовым путям 18 и 19 на подъемник 41 модульных оснований и опускаться на уровень мастерской, которая имеет свою собственную сеть рельсов 43 для перемещения модульных оснований предметов к площади пола 42 мастерской, служащей для ремонта и техобслуживания такого модульного основания конкретного предмета.
Фрагмент 50 сети рельсов 10 показан на фиг. 4A. Показан продольный рельсовый путь 51, пересекающий поперечный рельсовый путь 52. Каждый, продольный и поперечный рельсовый путь 51 и 52 содержит пару параллельных рельсов 53, 54 и 55, 56. Поперечное сечение рельса 53 показано на фиг. 4B. Рельсы 52-56 имеют несущее вес тело 57, криволинейные уступы 58 и верхнюю часть 59, проходящую поверх уступов 58. Пары параллельных рельсов 53, 54 и 55, 56 разнесены друг от друга, если необходимо на расстояние 3,2 м между линиями центров рельсов. На месте, где пара параллельных рельсов 53, 54 и 55, 56 пересекается, верхние части 59 рельсов не доходят до точки касания друг друга, оставляя зазор приблизительно 75 мм между ними, который является достаточным для обеспечения скольжения башмаку 60 (см. фиг. 5) между продольными и поперечными рельсовыми путями 51 и 52. Обеспечена верхняя часть 61 островного рельса для создания поддержки башмака 60, когда модульное основание проходит пересечение. Широкие рельсовые верхние части 62, 65 и 63, 64 обеспечены между параллельными рельсами продольных и поперечных рельсовых путей 51, 52 соответственно.
На фиг. 4C показано сечение рельса, применяемого на полу 42 мастерской, который имеет немного более низкий профиль.
На фиг. 5 показано модульное основание предмета одного типа, модульное основание 37 спайдера. Модульное основание 37 спайдера содержит квадратную базовую плиту 66 со сторонами длиной приблизительно 3,4 м, с круглым отверстием 67 в ней и углублением 68 вокруг круглого отверстия 67 с размером для посадки спайдера 69. Квадратная базовая плита 66 имеет башмак 60 на каждом углу, при этом расстояние между центрами башмаков составляет 3,2 м. Укороченная ножка 70 расположена между каждым углом квадратной базовой плиты 66 и башмаком 60. Башмак содержит ползун 71, имеющий верхнюю пластину 72 с размерами для посадки на верх верхней части 59 рельса, участок 73 юбки для установки поверх боковых сторон верхней части 59 рельса и зацепляющие участки 74 для введения под верхнюю часть 59 рельса и выше уступов 58. Верхняя пластина 72, участок 73 юбки и зацепляющий участок 74 образуют канал 75. Соответствующий перпендикулярный канал (не показано) также обеспечен в каждом башмаке, так что модульное основание 37 спайдера может перемещаться по рельсовому пути 51, рельсам 53, 54 проходить через пару каналов 75 и,з когда модульное основание спайдера 39 встает на рельсовый путь 52, рельсы 55, 56 проходят через соответствующие перпендикулярные каналы.
Модульное основание 37 спайдера перемещается вдоль сети рельсов 10 с помощью системы 76 продвижения. Система 76 продвижения содержит первыую лапу 77, расположенную на одной прямой с одним каналом 75 и расположенную на первом углу 79, и вторую лапу 78, расположенную на одной прямой с одним из соответствующих перпендикулярных каналов (не показано) на втором углу 80. Первая и вторая лапы 77, 78 имеют опорную плиту 81 и четыре избирательно управляемых боковых захвата 82. Каждая, первая и вторая лапы 77, 78, снабжена рычагом 83 перемещения который имеет жесткий элемент 84 и гидроцилиндр 85. Гидроцилиндр 85 относится к типу двустороннего действия. Первый жесткий элемент 84 на ближнем конце приварен или иначе неподвижно соединен с соответствующими верхними пластинами 72 первой и второй лапы 77, 78 и на дальнем конце шарнирно соединен штифтом с концом 86 гидроцилиндра 85, и конец 87 поршня гидравлического толкателя шарнирно соединен штифтом с опорной плитой 81. Бортовая система 88 управления управляет подачей рабочей жидкости гидросистемы в систему 76 продвижения.
В эксплуатации подачей рабочей жидкости гидросистемы в систему 76 продвижения управляет бортовая система 88 управления. Система 76 продвижения может работать в толкающем или втягивающем режиме в первом направлении или перпендикулярном втором направлении. В толкающем режиме в первом направлении гидроцилиндр 85 вначале сокращается и опорная плита 81 ложится на рельс, такой как рельс 53, с избирательно управляемыми боковыми захватами 82 в открытом положении, в котором они не касаются боков рельсов 53, и лежит в плоскости над рельсом 53. Бортовая система 88 управления направляет подачу рабочей жидкости гидросистемы в избирательно управляемые боковые захваты 82 для перемещения в закрытое положение, в котором они перемещаются вниз и внутрь для зажима рельса 53. Бортовая система 88 управления дополнительно направляет подачу рабочей жидкости гидросистемы в гидроцилиндр 85 для выдвижения. Модульное основание 37 спайдера толкается по рельсу 53 и равномерно по рельсовому пути 51. Избирательно управляемые боковые захваты 82 затем высвобождаются с помощью подачи рабочей жидкости гидросистемы, управляемой бортовой системой 88 управления, гидроцилиндр 85 сокращается с помощью подачи рабочей жидкости гидросистемы, управляемой бортовой системой 88 управления, при этом опорная плита 81 первой лапы 77 скользит по верхней часть рельса 53 в направлении к квадратной базовой плите 66. Данные этапы повторяются для циклической работы лапы 77, чтобы толкать модульное основание спайдера в первом направлении. Следует отметить, что вторая лапа 78 не применяется в данном режиме работы. Когда модульное основание 37 спайдера достигает перекрестка, Т-образного разветвление или угла поворота, вторую лапу применяют, чтобы толкать или тянуть модульное основание 37 спайдера по ним. Для режима толкания цикл проходит в обратном порядке. Модульное основание спайдера может перемещаться со скоростью между 0,3 и 3 м/мин.
Модульное основание 37 спайдера имеет стояночную систему 90. Когда модульное основание спайдера расположено вблизи заданного места стоянки, центральная система 105 управления активирует механизм 90 установки штифта 89 с нижней стороны квадратной базовой плиты 66, который опускает штифт на толкателе 89ʹ штифта, как показано на фиг. 7A и 7B. Стояночная система 90 расположена центрально на одном конце квадратной базовой плиты 66. Установочный штифт 89 теперь упруго смещен вниз на буровой пол 2 упругим средством, таким как пружина 89ʺ. Модульное основание 37 спайдера продолжает движение под действием собственного движителя до прохода установочного штифта 88 над установочным отверстием 91, в данной точке пружина смещает установочный штифт 88 в установочное отверстие 91. Система 88 управления прекращает подачу рабочей жидкости гидросистемы в систему 76 продвижения, прекращая дальнейшее перемещение модульного основания 37 спайдера. Четыре избирательно управляемых боковых захвата 82 приводятся в действие для зажима рельса 53, работая по типу ручного тормоза. Альтернативно или дополнительно, стояночная система 90 может также действовать по типу ручного тормоза для замедления перемещения модульного основания 37 спайдера.
Объединенные шланг подачи рабочей жидкости гидросистемы и линии связи, позиция 100, обеспечены между буровым полом 2 и модульным основанием 37 спайдера. Точки 92 подключения к гидравлической системе и точки 93 подключения к линии связи обеспечены в буровом полу 2 между рельсами и приблизительно на расстоянии 2,8 метра за каждым установочным отверстием 91. Точка 92 подключения к гидравлической системе соединена с источником подачи рабочей жидкости гидросистемы под давлением (не показано), которая является обычным элементом всех буровых установок и буровых судов. Точка 93 подключения к линии связи соединена с центральной компьютерной системой 105 управления буровой установки. Модульное основание 37 спайдера также обеспечено автоматической системой подключения. Соответствующий подключающий механизм 94 обеспечен на конце квадратной базовой плиты 66 противоположно стояночному механизму 90, на расстоянии приблизительно 2,8 м от него. Соответствующий подключающий механизм 94 имеет блок 99 соединителей, содержащий гидравлический соединитель 95 и связной соединитель 96, который расположен под небольшим толкателем 97 с автономным приводом. Объединенные шланг подачи рабочей жидкости гидросистемы и линии связи, позиция 100, жестко соединены с верхней частью блока 99 соединителей. Объединенные шланг подачи рабочей жидкости гидросистемы и линии связи, позиция 100, наматываются на катушку 101 с автономным приводом которая имеет механизм наматывания на катушку (не показано), который может быть простой пружиной, так что когда объединенные шланг подачи рабочей жидкости гидросистемы и линии связи, позиция 100, разматываются, пружина накапливает энергию. Катушка 101 смонтирована на монтажной конструкции 102. Объединенные шланг подачи рабочей жидкости гидросистемы и линии связи, позиция 100, имеет длину от пяти до тридцати метров, если необходимо, длину от десяти до двадцати метров.
В эксплуатации, когда модульное основание 37 спайдера закрепляется на месте установки, перематывающая катушка 101 с автономным приводом активируется для наматывания объединенного шланга подачи рабочей жидкости гидросистемы и линии связи, позиция 100, до возвращения блока 99 соединителей в положение, показанное на фиг. 5 и 7. Небольшой толкатель 97 с автономным приводом затем активируется для выдвижения. На точках подключения 92 и 93 может быть обеспечена крышка 103, которая автоматически открывается при вставлении установочного штифта 89 в установочное отверстие 91. Небольшой толкатель 97 с автономным приводом толкает блок 99 соединителей к точкам подключения 92 и 93, обеспечивая модульному основанию спайдера подачу рабочей жидкости гидросистемы под давлением и каналы связи между модульным основанием 37 спайдера и центральной компьютерной системой 105 управления на буровом судне 1.
Толкатель 89ʺ штифта убирается для уборки штифта 89 из установочного отверстия 91 и выведения из контакта с буровым полом 2, когда модульное основание 37 спайдера начинает перемещаться.
На рычаге 116, шарнирно закрепленном на квадратной базовой плите 66 обеспечен интерфейс 115 ручного управления. Интерфейс 115 ручного управления можно применять для управления вместо центральной компьютерной системы 105 управления.
Перед тем, как потребуется спайдер, передается команда операторам в мастерской на подготовку модульного основания 37 спайдера. Спайдер 69 устанавливают на модульное основание 37 спайдера в мастерской 42. Модульное основание 37 спайдера должно переместиться вверх на подъемнике 41 модульных оснований, по рельсовым путям 13 и быть закреплено на месте установки в буферной площади 40 хранения.
Как показано на фиг. 7C, бортовой компьютер 206 сбора информации подбирает пакет информации. Считывающее устройство 200 RFID-метки (метка радиочастотной идентификации) для стоянки, расположено с нижней стороны базовой плиты 66 смежно с стояночным механизмом 90. Считывающее устройство RFID-метки активируется бортовым компьютером 206 сбора информации для считывания информация места стоянки с RFID-метки 201 в буровом полу 2. Считывающее устройство RFID-метки 201 передает пакет информации места стоянки, такой как местоположение и идентификационный номер, на бортовой компьютер 206 сбора информации. Бортовой компьютер 206 сбора информации активирует считывающее устройство 204 RFID-метки спайдера для считывания информации о спайдере с RFID-метки 205. Если RFID-метки 205 для считывания нет, то бортовой пакет информации передается на бортовой компьютер 206 сбора информации, указывающий на, что спайдера 69 на модульном основании 37 спайдера нет. Для проверки, что указанное имеет место, можно применять дополнительный датчик веса, расположенный на базовой плите 66 и подключенный к бортовому компьютеру 206 сбора информации. Если считывающее устройство 204 RFID-метки способно прочитать RFID-метку 205, информация, связанная со спайдером 69, передается в бортовой компьютер 206 сбора информации, как пакет информации по спайдеру. Такой пакет информации по спайдеру может включать в себя данные о типе трубы, для применения с которой он подходит, размере, и любых неисправностях, которые он может иметь или имел и последующем устранении неисправностей. Пакет информации об ориентации, такой как ориентация модульного основания, может также быть получен бортовым компьютером 206 сбора информации с датчика ориентации (не показано). Также на модульном основании спайдера выполнено запоминающее устройство, такое как ОЗУ или программируемое ПЗУ (не показано), содержащее пакет информации модульного основания спайдера, с информацией, такой как идентификационный номер и описание, указывающие что данное является модульным основанием спайдера. Пакет информации модульного основания спайдера, пакет информации по ориентации, пакет информации спайдера, бортовой пакет информации и информация о месте стоянки подбираются в пакет информации модульных основании бортового компьютера 206 сбора информации и передаются в центральную компьютерную систему 105 управления.
Центральная система 105 управления обеспечена программным устройством для закрепления спайдера на центре устья скважины. Центральная система 105 управления также имеет пакет по каждому модульному основанию на сети рельсов. Центральная система 105 управления автоматически направляет модульное основание спайдера на его место назначения, когда требуется. Например, бурильщик может нажать кнопку ʺустановить спайдер бурильной трубы по центре устья первой скважиныʺ на визуальном интерфейсе (не показано) основной системы управления из модульного основания 31 кабины бурильщика. Место назначения должно располагаться на рельсовом пути 16 по центру 6 или 7 одной из скважин. Центральная компьютерная система 105 управления управляет модульным основанием 37 спайдера для выведения установочного штифта 89 из установочного отверстия 91 и последующего активирования бортовой системы 88 управления для такого управления системой 76 продвижения, которое делает возможным перемещение модульного основания 37 спайдера к его месту назначения. От площади 40 хранения модульное основание спайдера автономно перемещается по рельсовому пути 16 до заданного места стоянки возле центра устья скважины. Одновременно, модульное основание 36 крана (показано на фиг. 11-13) отправляют с буферной площади 40 хранения до заданного места стоянки на рельсовом пути 17 на вблизи центра устья скважины. Модульное основание крана имеет имеет самоходную систему, стояночную систему, автоматическую систему подключения и автоматическую систему управления, аналогичные описанным выше для модульного основания 37 спайдера. Следует отметить что катушка автоматической системы подключения не показана на фиг. 11-13 для ясности. Модульное основание 36 крана закрепляется на месте установки на рельсовом пути 17 на заданном месте стоянки с применением стояночного механизма (не показано), который является идентичным стояночному механизму 90, показанному и описанному выше для модульного основания 37 спайдера. Кран 112 на модульном основании 36 крана затем работает с дистанционным управлением, например, от модульного основания 31 кабины бурильщика, с применением электродистационной системы управления (не показано) для активирования гидравлических клапанов в кране 112, или может применяться в автоматическом режиме с помощью центральной компьютерной системы 105 управления. Компьютерная система 105 располагает данными местоположения модульного основания 36 крана и модульного основания 37 спайдера. В автоматическом режиме стрела 116 поднимается с применением толкателя 118 и выдвигается с применением толкателя 119 поверх спайдера 69 в модульном основании 37 спайдера. Крюк 117 спускается на канате 120 поверх спайдера 69 и проходит в принимающее крюк устройство спайдера (не показано). Крюк 117 поднимается на канате 120. Кран поворачивается на поворотном столе 121 и опускает крюк по центру устья скважины. Альтернативно, центральная система 105 управления управляет модульным основанием 37 спайдера для перемещения в требуемое положение над центром 6 или 7 устья скважины. Спайдер 69 может быть поднят от модульного основания 37 спайдера с применяющением крюка (не показано), подвешенного на верхнем приводе 106, 107 (см. фиг. 20) в вышке 4 или 5. Модульное основание 37 спайдера затем перемещается по рельсовому пути 16, и после этого верхний привод 106, 107 опускают буровой лебедкой 111 на канате 108 (не показано), который проходит по кронблоку 109, 110 в верхней части вышки 4, 5. Спайдер 69 таким образом спускают в буровой пол 2 по центру 6, 7 устья скважины.
Гидравлическая линия питания и линия связи для крана 112 обеспечены проходящими по вспомогательной линии (не показано) на модульном основании 36 крана, которая ответвляется от объединенного шланга подачи рабочей жидкости гидросистемы и линии связи, позиция 100. Таким образом дополнительное подключение не требуется.
Модульное основание 31 кабины бурильщика, показанное на фиг. 1-3 содержит кабину 47, расположенную на модульном основании 48, включающем в себя самоходную систему, стояночную систему, автоматическую систему подключения и автоматическую систему управления, аналогичную описанной выше в данном документе для модульного основания 37 спайдера. Вместе с тем, может применятьcя система подключения, управляемая вручную, как для модульного основания 39 испытательной тумбы противовыбросового превентора, описанная ниже. Поворотное основание 49 расположено между модульным основанием и кабиной 47 для обеспечения кабине 47 поворота относительно модульного основания 48 для помощи бурильщику и буровому мастеру в получении наилучшего обзора бурового пола 2, в том числе центров 6 и 7 устья скважины. Кабина бурильщика 31 имеет прозрачные стеклянные стенки и прозрачную стеклянную крышу для помощи бурильщику и буровому мастеру в получении наилучшего обзора бурового пола 2.
Модульное основание 39 испытательной тумбы противовыбросового превентора показано на фиг. 8-10 с испытательной тумбой 125 противовыбросового превентора на нем. Модульное основание 39 испытательной тумбы противовыбросового превентора является, в общем, аналогичным модульному основанию 37 спайдера, описанному выше, за исключением следующих отличий. Для несения испытательной тумбы 125 противовыбросового превентора выполнена базовая плита 126. Катушка 127 для объединенного шланга подачи рабочей жидкости гидросистемы и линий связи, позиция 129, снабжена протектором 128, окружающим верхнюю часть катушки 127. Катушка снабжена автоматическим механизмом наматывания на катушку, аналогично катушке 101. Вместе с тем, персонал буровой установки вручную подключает и отключает блок 129 соединителей на точках 92, 93 подключения, когда модульное основание перемещается по сети рельсов 10. Башмаки системы продвижения не показаны.
Модульное основание 38 отводного устройства показано на фиг. 14 и 15 с отводным устройством 130 на нем. Модульное основание 38 отводного устройства снабжено самодвижущейся системой, стояночной системой, автоматической системой подключения и автоматической системой управления, аналогичными описанным выше для модульного основания 37 спайдера, хотя может иметь систему подключения с ручным управлением, описанную выше для модульного основания 39 испытательной тумбы противовыбросового превентора. Модульное основание 38 отводного устройства, таким образом, в общем является аналогичным модульному основанию 37 спайдера, за исключением следующих отличий. Модульное основание отводного устройства имеет в общем плоскую базовую плиту 131 и механизм 132 подъемной стрелы. Механизм 132 подъемной стрелы содержит пару жестких рычагов 133 и 134 с изломом, длиной приблизительно 6 метров, каждый шарнирно прикреплен на нижнем конце к проушине 134ʹ и (не показано) приваренной к смежными переднии углам 134ʹ и 135 базовой плиты 131. Толкатели 136 и 137 установлены на шарнирах между проушинами 138 и 139, приваренными к смежным задним углам 140 и 141 базовой плиты 131 и местам 142 и 143 излома жестких рычагов 133 и 134. Снабженный приводом кронблок 144 подвешен на верхней перекладине 145, соединяющей верхние части жестких рычагов 133 и 134. Канат 146 проходит между снабженным приводом кронблоком 144 и небольшим талевым блоком 146, имеющим соединительное устройство 147.
При эксплуатации центральная система 105 управления автоматически отправляет модульное основание 38 отводного устройства к его месту назначения, когда требуется. Например, бурильщик может нажать кнопку ʺустановить отводное устройство по центру устья первой скважиныʺ на визуальном интерфейсе (не показано) основной системы управления из модульного основания 31 кабины бурильщика. Место назначения должно располагаться на рельсовом пути 16 на центре 6 или 7 одной из скважин. Центральная компьютерная система 105 управления управляет модульным основанием 38 отводного устройства для активирования стояночной системы для выведения установочного штифта из установочного отверстия 91 и затем активирования бортовой системы управления для управления системой продвижения так, что модульное основание 38 отводного устройства может перемещаться к своему месту назначения. От площади 40 хранения модульное основание 38 отводного устройства автономно перемещается на рельсовый путь 16 к заданному месту стоянки возле центра устья скважины. Механизм 132 подъемной стрелы вначале установлен в первом положении, идентифицированном пунктирными линиями на фиг. 14, с толкателями 136 и 137, по существу, находящимися в вертикальном положении и с соединительным устройством 147 соединенным с точкой подъема (не показано) на отводном устройстве 130. Центральная компьютерная система 105 управления: активирует снабженный приводом кронблок 144 для подъема отводного устройства 130 над базой 131; выдвигает гидравлические толкатели 136 и 137 для перемещения отводного устройства поверх центра 6 устья скважины; активирует снабженный приводом кронблок 144 для опускания отводного устройства 130 на центр устья скважины. Альтернативно, механизмом 132 подъемной стрелы управляют дистанционно, например, от модульного основания 31 кабины бурильщика, применяя электродистационную систему управления (не показано) для активирования гидравлических клапанов (не показано) в механизме 132 подъемной стрелы. Гидравлическая линия питания и линия связи для механизма 132 подъемной стрелы обеспечена проходящей через вспомогательную линию (не показано) на модульном основании 38 отводного устройства, которая ответвляется от объединенных, шланга подачи рабочей жидкости гидросистемы и линии связи, позиция 100. Таким образом дополнительное подключение не требуется.
Пустые модульные основаниям могут быть снабжены простой квадратной плоской базовой плитой для перемещения других предметов по буровому полу 2. Два или больше пустых модульных оснований могут работать в унисон, один за другим для перемещения длинных или крупногабаритных предметов.
Подъемник 41 модульных оснований показан на фиг. 16-19. Подъемник 41 модульных оснований содержит пол 150 подъемника, имеющий рельсовый путь 151 и перпендикулярный рельсовый путь 152 для направления модульных оснований на рельсовые пути 13 и 19 на буровом полу 2. Установочное отверстие 165 обеспечено для содействия закреплению на месте установки модульного основания на полу 151 подъемника. Предусмотрен проем 153 в буровом полу 2, который, по существу, имеет одинаковый размер с полом 151 подъемника, так что когда пол 2 подъемника находится на уровне бурового пола 2, имеется весьма незначительный зазор в несколько миллиметров между концами смежных рельсов 154 и 155, как показано на фиг. 18A. Около пола 151 подъемника предусмотрены леера 156. Около проема 153 в буровом полу 2 предусмотрены леера 156ʹ. Леера 156 на сторонах 157 и 158 скользят вниз, когда пол 151 подъемника находится на одной прямой либо с буровым полом 2 или полом 42 мастерской, для обеспечения прохода модульным основаниям. Пол 151 подъемника несет конструкция 159, которая выполнена с возможностью скольжения по паре вертикальных конструкций 160. Двигатель 161 приводит во вращение две пары зубчатых колес 162, расположенных вдоль вертикального рельсового пути 163. Активированием подъемника 41 модульных оснований управляет центральная компьютерная система 105 управления.
Модульное основание 30 манипулятора для хвостовой части труб, показанное на фиг. 1 и 2, снабжено самодвижущейся системой, стояночной системой, автоматической системой подключения и автоматической системой управления, аналогичными описанным выше для модульного основания 37 спайдера, хотя может иметь систему подключения с ручным управлением, описанную выше для модульного основания 39 испытательной тумбы противовыбросового превентора. Модульное основание 30 манипулятора для хвостовой части труб является, таким образом, в общем, аналогичным модульному основанию 37 спайдера, за исключением следующих отличий. Основание 167 является, по существу, плоским с вертикальным жестким столбом 168 на котором установлен рычаг 166 трубного манипулятора, имеющий трубный зажим 169ʹ. Рычаг 166 трубного манипулятора и трубный зажим 169ʹ имеют гидравлическое управление и управляются центральной компьютерной системой 105 управления. Гидравлическая линия питания и линия связи для рычага 166 трубного манипулятора обеспечены через вспомогательную линию (не показано) на модульном основании 30 манипулятора для хвостовой части трубы, которая ответвляется от объединенных шланга подачи рабочей жидкости гидросистемы и линии связи, позиция 100. Таким образом дополнительное подключение не требуется.
Модульное основание 32 стрелы манипулятора для райзера, показанное на фиг. 1 и 3, обеспечено самодвижущейся системой, стояночной системой, автоматической системой подключения и автоматической системой управления, аналогичными описанным выше для модульного основания 37 спайдера, хотя может иметь управляемую вручную систему подключения, описанную выше для модульного основания 39 испытательной тумбы противовыбросового превентора. Модульное основание 32 стрелы манипулятора для райзера является, таким образом, в общем аналогичным модульному основанию 37 спайдера, за исключением следующих отличий. Основание 190 выполнено, как Х-образная конструкция, лежащая в горизонтальной плоскости с плоским квадратным центральным участком 191, с поднятой платформой 192, на которой установлена свободно вращающаяся горизонтально выдвигающаяся стрела 193 для манипуляций с райзером, имеющая направляющую 194 райзера. Выдвигающаяся стрела 193 для манипуляций с райзером имеет гидравлическое управление и управляется центральной компьютерной системой 105 управления. Гидравлическая линия питания и линия связи выдвигающейся стрелы 193 для манипуляций с райзером обеспечены через вспомогательную линию (не показано) на модульном основании 32 стрелы манипулятора для райзера, которая ответвляется от объединенных шланга подачи рабочей жидкости гидросистемы и линии связи, позиция 100. Таким образом дополнительное подключение не требуется.
Модульное основание 34 гибкой насосно-компрессорной трубы показанное на фиг. 2, обеспечено самодвижущейся системой, стояночной системой, автоматической системой подключения и автоматической системой управления, описанными выше для модульного основания 37 спайдера, хотя может иметь управляемую вручную систему подключения, описанную выше для модульного основания 39 испытательной тумбы противовыбросового превентора. Модульное основание 34 гибкой насосно-компрессорной трубы является, таким образом, в общем, аналогичным модульному основанию 37 спайдера, за исключением следующих отличий. Основание 195 является в общем плоским, с рамой 196 барабана, установленной с возможностью вращения на нем. Рама барабана имеет барабан 197, установленный в ней, барабан имеет горизонтальную ось. Рама 196 барабана установлена свободно вращающейся на плоском основании 195 так, что рама 196 барабана может поворачиваться вокруг вертикальной оси для обеспечения гибкой насосно-компрессорной трубе 198 на барабане 197 разматывания перпендикулярно оси барабана, вне зависимости от местоположения модульного основания гибкой насосно-компрессорной трубы на сети рельсов 10. Барабан 197 имеет приводную систему (не показано) для помощи разматыванию и наматыванию. Приводная система может иметь гидравлическое управление и управляться центральной компьютерной системой 105 управления. Гидравлическая линия питания и линия связи для приводной системы обеспечены через вспомогательную линию (не показано) на модульном основании 34 гибкой насосно-компрессорной трубы, которая ответвляется от объединенных шланга подачи рабочей жидкости гидросистемы и линии связи, позиция 100. Таким образом дополнительное подключение не требуется.
На фиг. 20 и 21 показаны части бурового судна 1. Буровое судно 1 имеет большие краны 170, которые применяютcя для погрузки и разгрузки оборудования, на стороне погрузочно-разгрузочной платформы. Они также применяются для перемещения оборудования на буровом полу 2. Имеется носовой трюм 171 для частей райзера 172. Конструкция 9 подачи и скрепления труб обеспечивает площадь для скрепления звеньев бурильной трубы в свечи 173, которые устанавливают на подсвечник в трюме 174. Стрела 175 подачи труб осуществляет манипуляции со свечами бурильной трубы от трюма 174 до центра 6 или 7 устья скважины.
Сеть рельсов 10 содержит рельсовый путь 11-19 со схемой размещения, которая должна подходить для бурового пола на буровом судне с вышкой для одновременного строительства двух скважин. Схема размещения для буровых установок других типов, таких, как буровое судно с вышкой для строительства одной скважины, должна быть практически одинаковой, но с уменьшенным рельсовым путем. Схема размещения для плавучего нефтекомплекса (FPSO) с вышкой для одновременного строительства двух скважин должна быть аналогичной или практически одинаковой. Схемы размещения для буровой морской платформы с вышкой для одновременного строительства двух скважин, платформы типа SPAR, двухкорпусной платформы типа SWATH и платформы с натяжными опорами должны быть одинаковыми или практически одинаковыми. При этом, специалист в данной области техники должен уметь спроектировать подходящую модифицированную схему размещения для буровой установки любого типа. Сеть рельсов может быть упрощена для сухопутной буровой установки, в общем имеющей буровой пол, который гораздо меньше.
Предусмотрена возможность замены гидравлической системы 76 продвижения пневматической системой или частично гидравлической и частично пневматической системой. Также предусмотрена возможность применения электрической системы продвижения.
Предусмотрена возможность перемещения и примененения других предметов с сохранением установки на модульные основания изобретения, таких как устройство для механизированной подвески и развинчивания труб и инструмент непрерывной циркуляции.
Группа изобретений относится к системе для перемещения предметов на буровом полу. Система содержит множество модульных оснований и сеть рельсов для направления множества модульных оснований. Каждое модульное основание из множества модульных оснований предназначено для опоры на него предмета и имеет элементы для сцепления с рельсами, служащие для сцепления по меньшей мере с одним рельсом из сети рельсов. Сеть рельсов содержит по меньшей мере одно заданное место стоянки. Система дополнительно содержит центральную компьютерную систему управления и стояночный датчик для получения информации о местоположении стоянки, указывающей на то, что модульное основание из множества модульных оснований расположено на заданном месте стоянки, и передачи информации о местоположении стоянки в центральную компьютерную систему управления, а также датчик присутствия предмета для определения, имеется ли предмет на модульном основании, и передачи информации о присутствии предмета в центральную компьютерную систему управления. Буровой пол может образовывать часть буровой установки, такой как буровое судно, применяемое в строительстве нефтяных и газовых скважин. Технический результат заключается в повышении эффективности системы для перемещения предметов на буровом полу. 5 н. и 36 з.п. ф-лы, 30 ил.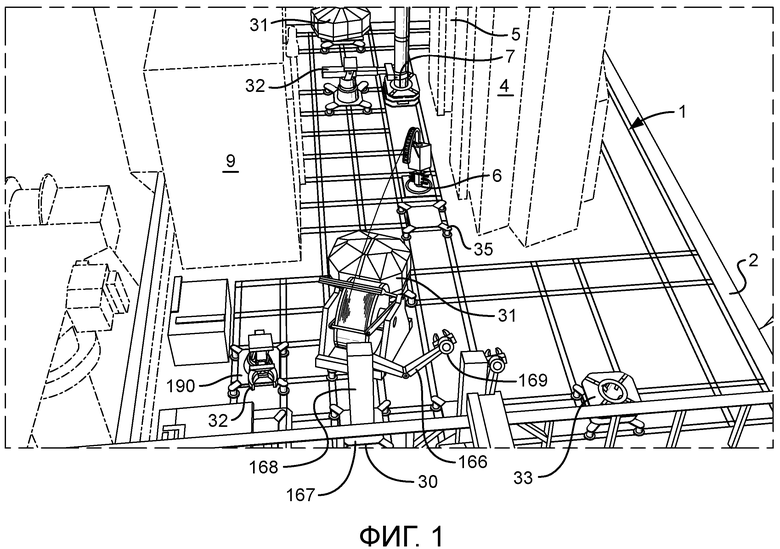
1. Система для перемещения предметов на буровом полу, содержащая множество модульных оснований и сеть рельсов для направления множества модульных оснований, причем каждое модульное основание из множества модульных оснований предназначено для опоры на него предмета, и каждое модульное основание имеет элементы для сцепления с рельсами, служащие для сцепления по меньшей мере с одним рельсом из сети рельсов, причем сеть рельсов дополнительно содержит по меньшей мере одно заданное место стоянки, при этом система дополнительно содержит центральную компьютерную систему управления и стояночный датчик для получения информации о местоположении стоянки, указывающей на то, что модульное основание из множества модульных оснований расположено на заданном месте стоянки, и передачи информации о местоположении стоянки в центральную компьютерную систему управления, а также датчик присутствия предмета для определения, имеется ли предмет на модульном основании, и передачи информации о присутствии предмета в центральную компьютерную систему управления.
2. Система по п. 1, в которой модульное основание содержит движитель для перемещения модульного основания по сети рельсов.
3. Система по п. 2, в которой движитель содержит два механизма продвижения, расположенных перпендикулярно друг другу.
4. Система по п. 2, в которой движитель содержит циклически действующую лапу для перемещения модульного основания по сети рельсов.
5. Система по п. 4, в которой циклически действующая лапа содержит захватный механизм, который избирательно захватывает и высвобождает рельс из сети рельсов.
6. Система по любому из пп. 2-5, в которой движитель приводится в действие гидравлически.
7. Система по п. 6, в которой модульное основание содержит гибкую гидравлическую линию для снабжения энергией движителя.
8. Система по п. 7, в которой модульное основание содержит катушку гидравлического шланга.
9. Система по п. 6 или 7, в которой буровой пол содержит множество точек подключения к трубопроводам гидравлической системы.
10. Система по п. 9, в которой гидравлический шланг имеет один конец, снабженный соединителем, при этом модульное основание содержит перемещающееся средство для вставления соединителя в одну из точек подключения к трубопроводам гидравлической системы.
11. Система по любому из пп. 2-10, дополнительно содержащая компьютер управления продвижением для управления движителем.
12. Система по любому из предыдущих пунктов, в которой сеть рельсов выполнена в виде решетки, образующей решетку рельсов.
13. Система по п. 12, в которой сеть рельсов содержит пару параллельных рельсов, по которым направляют множество модульных оснований.
14. Система по п. 12 или 13, в которой решетка рельсов содержит пересекающиеся продольные рельсы и поперечные рельсы, а также зазор в продольном рельсе и зазор в поперечном рельсе на пересечении.
15. Система по п. 14, в которой по меньшей мере один элемент для сцепления с рельсом содержит башмак, имеющий участок юбки, образующий продольный канал и поперечный канал.
16. Система по любому из предыдущих пунктов, в которой заданное место стоянки содержит физическое средство, приводимое в действие по достижении места стоянки, для обеспечения физической индикации, что модульное основание расположено на месте стоянки.
17. Система по любому из предыдущих пунктов, в которой заданное место стоянки содержит буровой пол, имеющий одно из установочного штифта и установочного отверстия на заданном месте стоянки, и по меньшей мере одно из модульных оснований имеет другое из установочного штифта и установочного отверстия, так что при применении одно из установочного штифта и установочного отверстия перемещается для установки установочного штифта в установочном отверстии.
18. Система по п. 17, дополнительно содержащая идентификационную метку в буровом полу, при этом стояночный датчик является устройством, считывающим идентификационную метку, для считывания идентификационной метки в буровом полу.
19. Система по любому из предыдущих пунктов, дополнительно содержащая запоминающее устройство для сохранения информации устройства, идентифицирующего модульное основание, передаваемой с модульного основания в центральную компьютерную систему управления.
20. Система по любому из предыдущих пунктов, дополнительно содержащая датчик информации о предмете для считывания информации о предмете и передачи информации о предмете в центральную компьютерную систему управления.
21. Система по п. 20, дополнительно содержащая идентификационную метку на предмете, и датчик информации о предмете является устройством, считывающим идентификационную метку, для считывания идентификационной метки в буровом полу, причем идентификационная метка содержит информацию о предмете.
22. Система по любому из предыдущих пунктов, дополнительно содержащая датчик ориентации модульного основания и передающая информацию об ориентации модульного основания в центральную компьютерную систему управления.
23. Система по любому из предыдущих пунктов, в которой по меньшей мере два из следующего: информации о местоположении стоянки, информации о присутствии предмета, информации о предмете и информации об ориентации модульного основания подбираются бортовым компьютером сбора информации, собираются в пакет и отправляются в виде пакета информации в центральную компьютерную систему управления.
24. Система по п. 23, в которой центральная компьютерная система управления принимает пакеты информации для всех модульных оснований на сети рельсов.
25. Система по п. 23, в которой центральную компьютерную систему управления программируют информацией о схеме размещения инструментов и оборудования для различных стандартных операций и, опционально, для отображения перечня стандартных операций для выбора бурильщиком или буровым мастером.
26. Система по п. 25, в которой центральная компьютерная система управления управляет всеми модульными основаниями, применяя пакеты информации.
27. Система по п. 26, в которой центральная компьютерная система управления управляет перемещением заданного набора модульных оснований для получения и расстановки инструментов и оборудования для выполнения работы, определенной бурильщиком или буровым мастером.
28. Система по пп. 25, 26 или 27, в которой стандартные операции берутся из перечня, содержащего:
бурение; спускоподъемные операции; установку обсадной колонны; заканчивание скважины; и капитальный ремонт.
29. Система по любому из предыдущих пунктов, в которой сеть рельсов содержит вертикально перемещающуюся секцию рельсов.
30. Система по любому из предыдущих пунктов, в которой буровой пол расположен на одном из: буровом судне; плавучем нефтекомплексе FPSO; буровой морской платформе, такой как платформа SPAR, платформа SWATH, платформа SeaStar и платформы с натяжными опорами; и сухопутной буровой установке.
31. Способ компоновки предметов на буровом полу, в котором предоставляют множество модульных оснований, сеть рельсов для направления множества модульных оснований, центральную компьютерную систему управления, стояночный датчик и датчик присутствия предмета, причем каждое модульное основание имеет элементы для сцепления с рельсами, служащие для сцепления по меньшей мере с одним рельсом из сети рельсов, причем сеть рельсов дополнительно содержит по меньшей мере одно заданное место стоянки, причем способ содержит этапы перемещения предмета на модульном основании из множества модульных оснований по меньшей мере по части бурового пола, при этом стояночный датчик получает информацию о местоположении стоянки, указывающую на то, что модульное основание из множества модульных оснований расположено на заданном месте стоянки, и передает информацию о местоположении стоянки в центральную компьютерную систему управления, а также определяют, имеется ли предмет на каждом модульном основании из множества модульных оснований, с помощью датчика присутствия предмета, и передают информацию о присутствии предмета в центральную компьютерную систему управления.
32. Буровой пол, имеющий множество модульных оснований и сеть рельсов для направления множества модульных оснований, причем каждое модульное основание из множества модульных оснований предназначено для опоры на него предмета, и каждое модульное основание имеет элементы для сцепления с рельсами, служащие для сцепления по меньшей мере с одним рельсом из сети рельсов, при этом система содержит систему стоянки, имеющую стояночный датчик для получения информации о местоположении стоянки, указывающей на то, что модульное основание из множества модульных оснований расположено на заданном месте стоянки, и датчик присутствия предмета для определения, имеется ли предмет на модульном основании.
33. Модульное основание бурового пола по п. 32, содержащее основание, движитель и башмак для сцепления с рельсом.
34. Модульное основание по п. 33, дополнительно содержащее катушку гидравлического шланга.
35. Модульное основание по п. 34, в котором катушка имеет систему автоматического наматывания, так что гидравлический шланг остается натянутым между катушкой и точкой подключения.
36. Модульное основание по п. 34 или 35, в котором гидравлический шланг снабжен соединителем, и модульное основание снабжено средством для вставления соединителя в точку подключения в буровом полу.
37. Модульное основание по любому из пп. 33-36, содержащее вспомогательную гидравлическую линию для снабжения энергией оборудования, установленного на модульном основании.
38. Модульное основание по любому из пп. 33-37, причем модульное основание содержит штифт для установки в отверстие в буровом полу.
39. Модульное основание по любому из пп. 33-38, в котором модульное основание содержит два узла движителей, расположенных перпендикулярно друг другу и индивидуально приводимых в действие для избирательного продвижения модульного основания в первом направлении и перпендикулярном втором направлении.
40. Модульное основание по любому из пп. 33-39, содержащее только одно из следующего: посадочное место, выполненное для приема спайдера; посадочное место, выполненное для приема испытательной тумбы противовыбросового превентора; кран; манипулятор для хвостовой части трубы; манипулятор для хвостовой части райзера; устройство для механизированной подвески и развинчивания труб; инструмент непрерывной циркуляции; кабина бурильщика; стрела для подачи отводного устройства и базовая плита для опоры отводного устройства; поворотный стол и рама на нем для опоры вращающегося барабана для гибкой насосно-компрессорной трубы; посадочное место, выполненное для приема бурового ротора.
41. Система для перемещения предметов на буровом полу, содержащая множество модульных оснований и сеть рельсов для направления множества модульных оснований, причем каждое модульное основание из множества модульных оснований предназначено для опоры на него предмета, и каждое модульное основание из множества модульных оснований имеет элементы для сцепления с рельсами, служащие для сцепления по меньшей мере с одним рельсом из сети рельсов, причем сеть рельсов дополнительно содержит по меньшей мере одно заданное место стоянки, при этом система дополнительно содержит центральную компьютерную систему управления и стояночный датчик для получения информации о местоположении стоянки, указывающей на то, что модульное основание из множества модульных оснований расположено на заданном месте стоянки, и передачи информации о местоположении стоянки в центральную компьютерную систему управления, причем информация устройства, идентифицирующего модульное основание, передается с модульного основания из множества модульных оснований в центральную компьютерную систему управления.
| US 2012018166 A1, 26.01.2012 | |||
| US 4544135 A, 01.10.1985 | |||
| EA 200500179 A1, 30.06.2005 | |||
| МНОГОФУНКЦИОНАЛЬНАЯ МНОГОСТВОЛЬНАЯ БУРОВАЯ УСТАНОВКА | 2009 |
|
RU2507366C2 |
| US 4823870 A, 25.04.1989 | |||
| WO 2014108542 A2, 17.07.2014. | |||

