УРОВЕНЬ ТЕХНИКИ
[001] Данное изобретение относится, в основном, к способам и устройствам для реализации методов дальнометрии для определения расстояния и направления между соседними проводниками.
[002] В то время как в мире уже добыто много легкодоступной нефти, разрабатываются новые методы для добычи менее доступных углеводородных запасов. Эти методы часто включают бурение ствола скважины в непосредственной близости от одной или более существующих скважин. Примеры направленного бурения вблизи существующей скважины включают пересечение для регулирования внезапного выброса, множество скважин, пробуренных с буровой морской платформы, и расположенные вблизи друг от друга скважины для получения геотермальной энергии. Другим подобным методом является парогравитационный дренаж (ПГД), в котором задействована пара горизонтальных скважин, размещенных по вертикали друг от друга на расстоянии менее 10 метров. Тщательное регулирование расстояния играет ключевую роль в эффективной реализации метода.
[003] Одним из способов направления ствола скважины в непосредственной близости от существующей скважины является «обусловленная доступом активная дальнометрия», при выполнении которой электромагнитный источник расположен в существующей скважине и контролируется посредством датчиков на бурильной колонне. Системы, которые обнаруживают как источник, так и датчики на колонне бурильных труб, часто классифицируются как устройства «необусловленной доступом активной дальнометрии». Существующие методы дальнометрии часто учитывают лишь одну окружающую обсадную колонну существующей скважины (например, целевой скважины) по отношению к буровой скважине и не могут определить в глубине скважины множество целей, что ограничивает применение этих методов.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[004] Фиг. 1 иллюстрирует приведенную в качестве примера буровую среду, в которой может быть применена многоскважинная дальнометрия, в соответствии с различными вариантами реализации изобретения.
[005] Фиг. 2A-2B иллюстрируют приведенный в качестве примера вариант реализации дальномерного инструмента, а также переменные, используемые для анализа функций дальномерного инструмента.
[006] Фиг. 3 иллюстрирует вид сбоку сверху приведенного в качестве примера варианта реализации системы для определения азимутального направления между буровой скважиной и целевой скважиной.
[007] Фиг. 4A-4D иллюстрируют приведенные в качестве примера смоделированные амплитуды магнитных полей, окружающих источники возбуждения в целевых скважинах в соответствии с различными вариантами реализации изобретения.
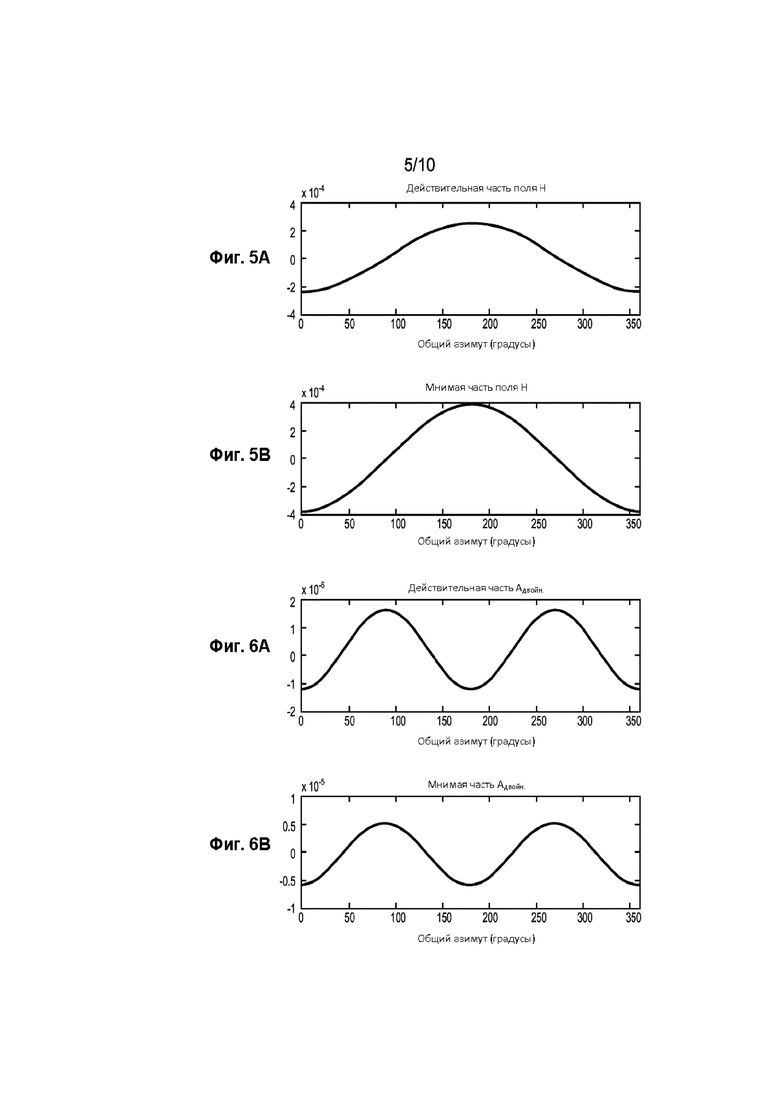
[008] Фиг. 5A-5B представляют собой графики полученных азимутальных сигналов одиночных синусоидальных откликов в соответствии с различными вариантами реализации изобретения.
[009] Фиг. 6A-6B представляют собой графики полученных азимутальных сигналов двойных синусоидальных откликов в соответствии с различными вариантами реализации изобретения.
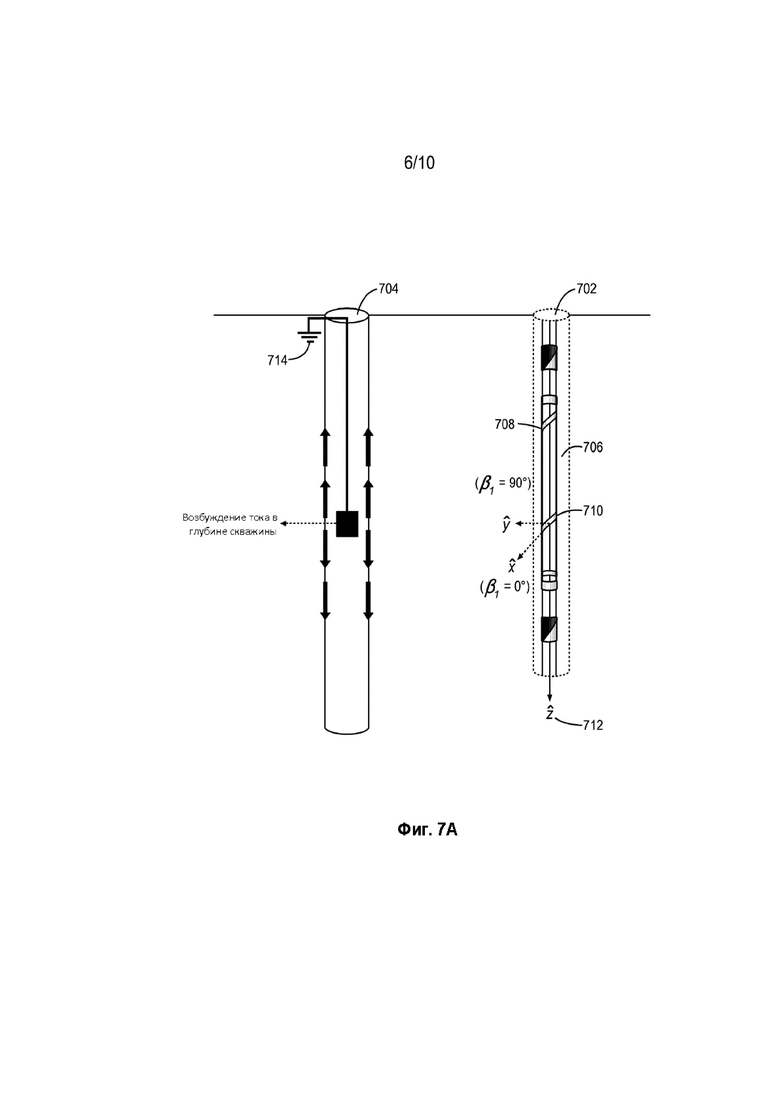
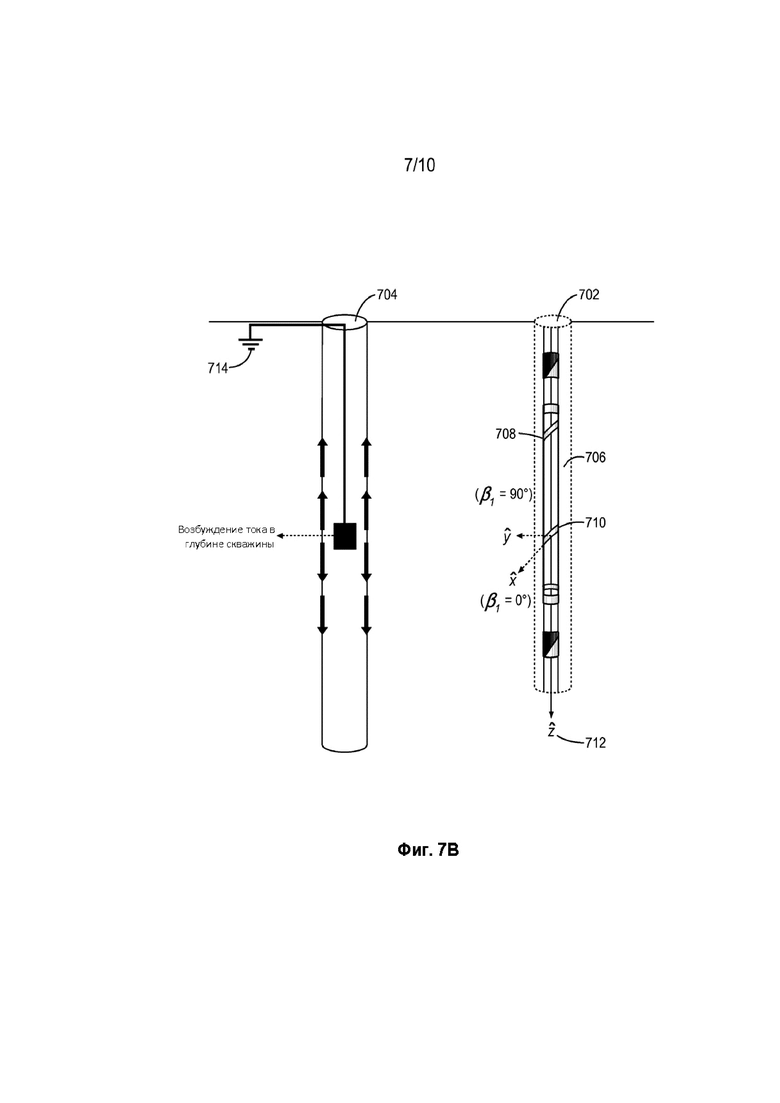
[0010] Фиг. 7A-7B иллюстрируют две приведенные в качестве примера конфигурации источника возбуждения тока в соответствии с различными вариантами реализации изобретения.
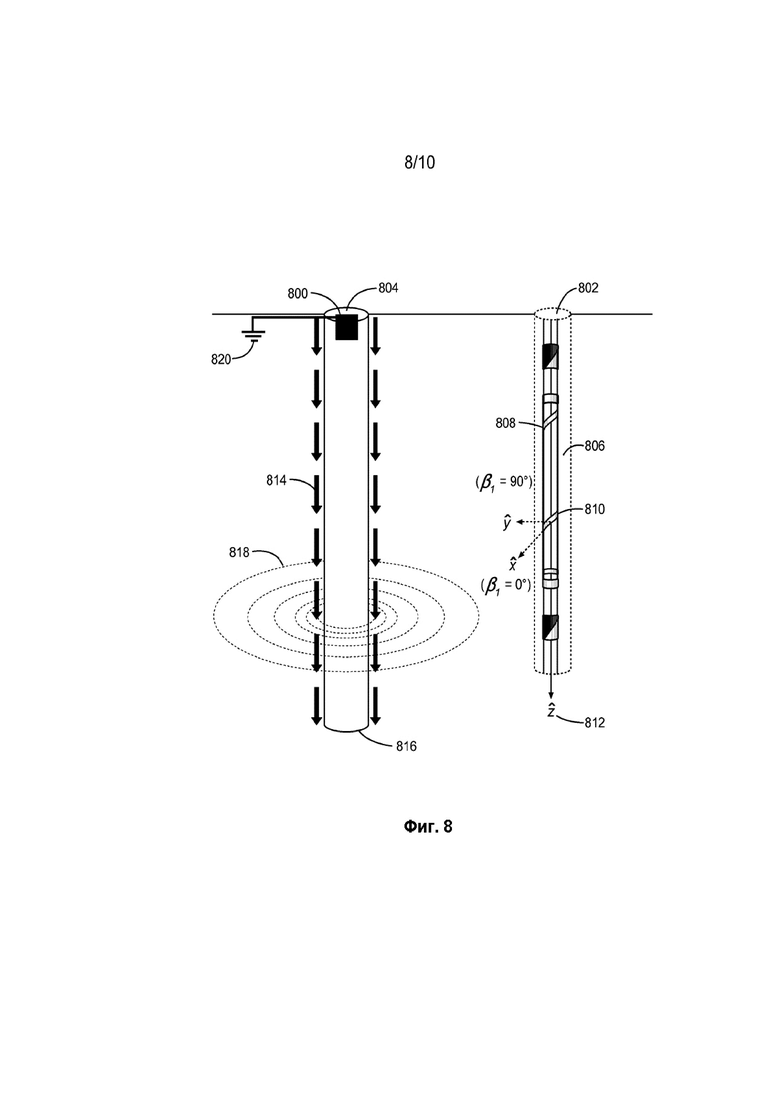
[0011] Фиг. 8 иллюстрирует приведенную в качестве примера конфигурацию наземного источника возбуждения тока в соответствии с различными вариантами реализации изобретения.
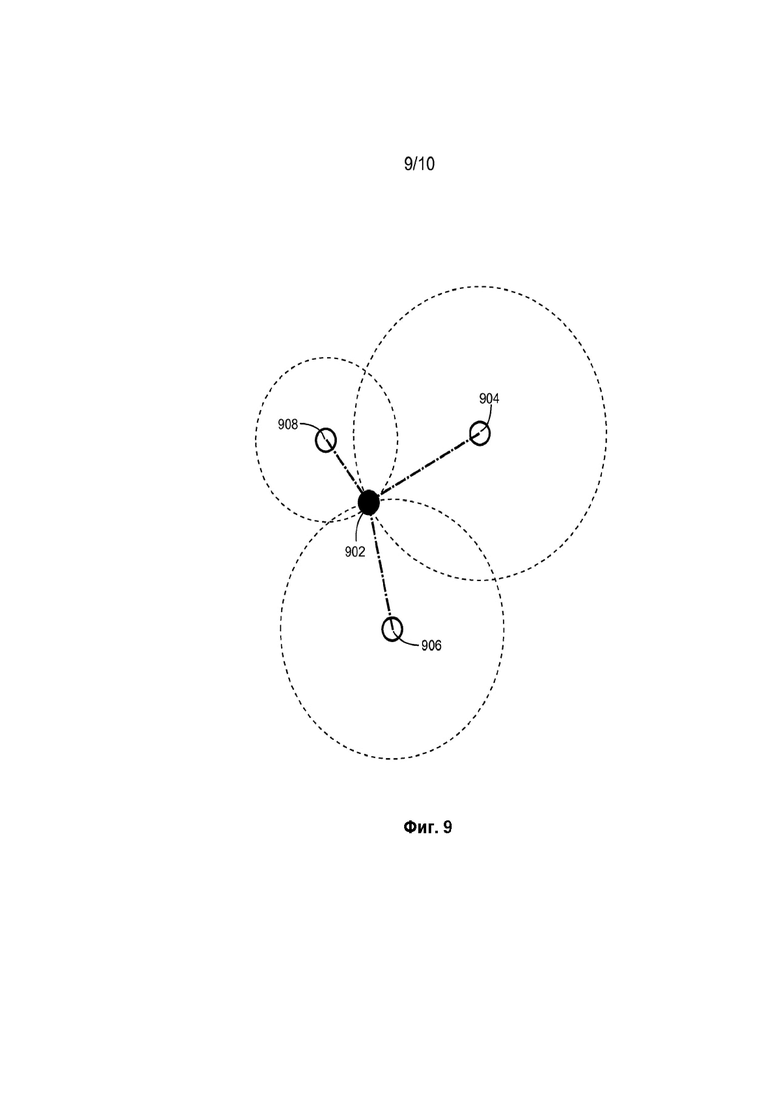
[0012] Фиг. 9 иллюстрирует вид сверху местоположений целевых скважин относительно буровой скважины для определений многоскважинной дальнометрии в соответствии с различными вариантами реализации изобретения.
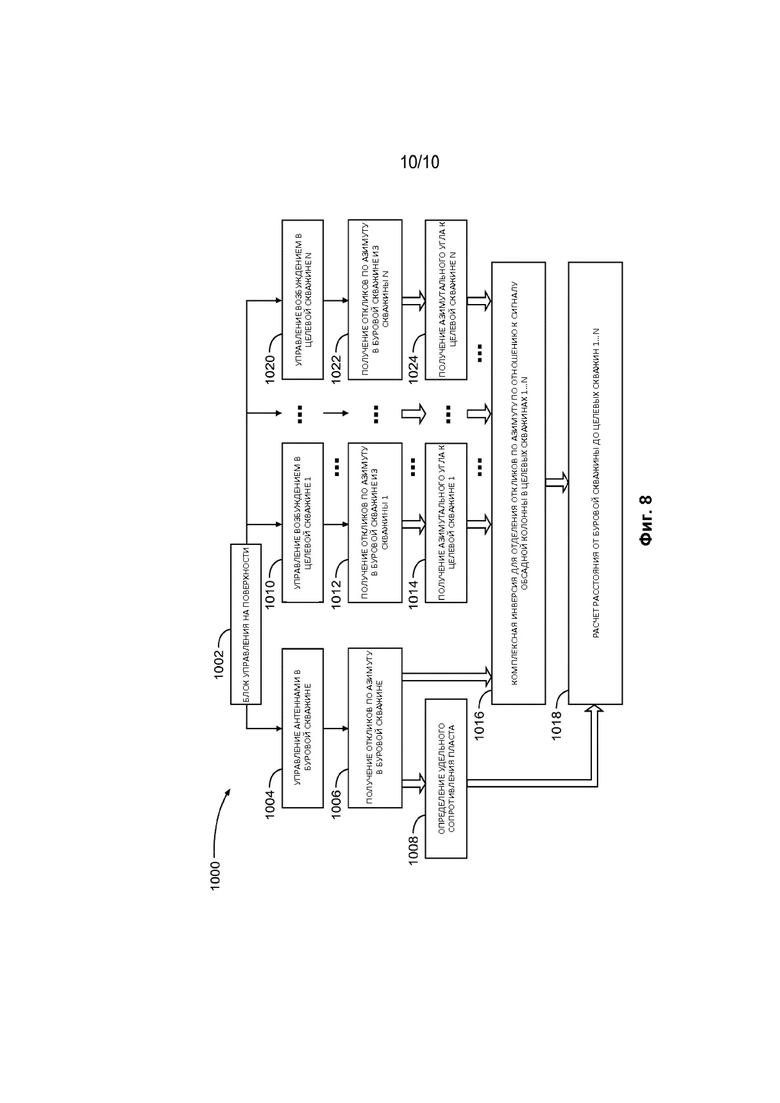
[0013] Фиг. 10 иллюстрирует блок-схему приведенного в качестве примера способа многоскважинной дальнометрии в соответствии с различными вариантами реализации изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0014] Данное раскрытие изобретения описывает различные методы дальнометрии, применяемые для определения относительных расстояний и относительных направлений среди скважин на основании возбуждений тока, созданных в множестве обсаженных скважин, и электромагнитных антенн, которыми оснащен каротажный инструмент в буровой скважине. Соседняя колонна обсадных труб целевой скважины может быть обнаружена путем передачи электромагнитного сигнала от источника возбуждения, расположенного вдоль целевой скважины, и измерения сигнала отклика антенной, установленной на скважинном каротажном инструменте в буровой скважине. Для отличия сигналов соседних проводников от сигналов из пластов, для различных целевых скважин используют несколько различных источников возбуждения. Алгоритмы комплексной инверсии используются для определения местоположений множества скважин на основании сигналов, исходящих от различных источников возбуждения.
[0015] Существует необходимость в возможности на практике определять относительные расстояние и направление среди множества скважин посредством источников возбуждения различных типов. Возможность разрешать множество целей в глубине скважины обеспечат навигацию бурового долота в месторождении, насыщенном существующими добывающими нефтяными скважинами в рамках создания новой скважины, не прерывая при этом добычу из любой иной существующей скважины в зоне месторождения.
[0016] Способы обработки, основанные на комплексной инверсии среди источников возбуждения различных типов, представлены для определения расстояния и направления между буровой скважиной и одной смежной скважиной. Применение комплексной инверсии среди различных возбуждений позволяет разрешать множество целей. Разделение сигналов, исходящих от множества целей, включая анизотропию пласта и множество соседних обсадных колонн, дает возможность определять местоположения множества скважин на основании измеренных откликов сигналов от различных источников возбуждения. Комплексные инверсии могут быть применены в режиме реального времени или в операциях последующей обработки в таких вариантах применения, как парогравитационный дренаж (ПГД), контроль сближения стволов скважин и разработка разгрузочной скважины.
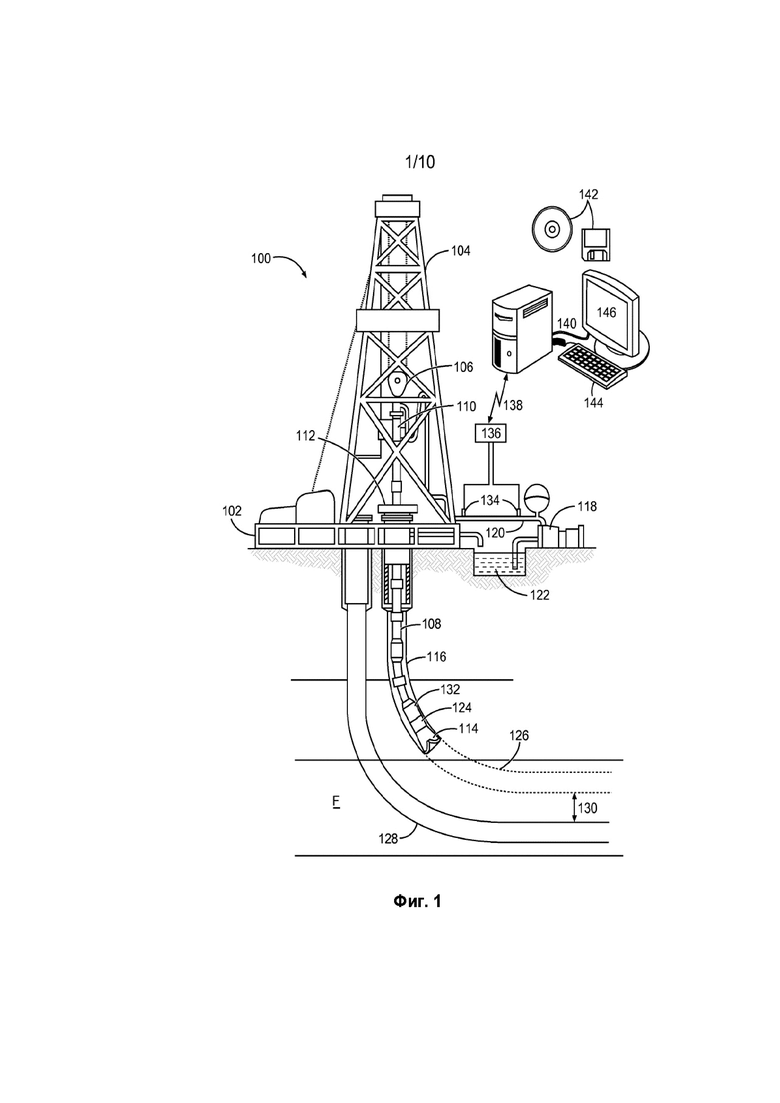
[0017] Раскрытые инструменты и способы можно лучше всего понять в контексте более крупных систем, в которых они действуют. Соответственно, Фиг. 1 иллюстрирует приведенную в качестве примера буровую среду 100, в которой на буровой платформе102 установлена буровая вышка 104, имеющая подвижной блок 106 для подъема и спуска бурильной колонны 108. Верхний силовой привод 110 поддерживает и вращает бурильную колонну 108 по мере ее опускания через устье 112 скважины. Буровое долото 114 приводят в движение посредством забойного двигателя и/или посредством вращения бурильной колонны 108. При вращении буровое долото 114 создает ствол 116 скважины, который проходит сквозь различные пласты. Насос 118 обеспечивает циркуляцию бурового раствора через подающую трубу 120 на верхний силовой привод 110, вглубь скважины через внутреннее пространство бурильной колонны 108, через отверстия в буровом долоте 114, обратно на поверхность по затрубному пространству вокруг бурильной колонны 108 и в сточный резервуар 122. Буровой раствор доставляет шлам из ствола скважины в сточный резервуар 122 и помогает поддерживать целостность ствола скважины.
[0018] Буровое долото 114 является лишь одной деталью компоновки низа бурильной колонны, которая содержит одну или более утяжеленных бурильных труб (толстостенная стальная труба), для обеспечения массы и жесткости, что содействует процессу бурения. Некоторые из этих утяжеленных бурильных труб содержат каротажные инструменты, используемые для сбора результатов измерений различных параметров бурения, таких как местоположение, ориентация, нагрузка на долото, диаметр ствола скважины и т. д. Ориентация инструмента может быть определена в единицах угла торца инструмента (также известного как угловая или азимутальная ориентация), угла наклона (наклон) и направления по компасу, каждый из которых может быть получен из измерений, выполненных посредством магнитометров, инклинометров и/или акселерометров, хотя в альтернативном варианте могут быть использованы и датчики других типов, такие как гироскопы. В соответствии с одним конкретным вариантом реализации изобретения указанный инструмент содержит трехосный феррозондовый магнитометр и трехосный акселерометр. Как известно в данной области техники, комбинация этих двух систем датчиков обеспечивает возможность измерения угла торца инструмента, угла наклона и направление по компасу. В некоторых вариантах реализации изобретения углы торца инструмента и наклона ствола скважины вычисляются на основании выходных данных датчика акселерометра. Выходные данные датчика магнитометра используются для вычисления направления по компасу.
[0019] Компоновка низа бурильной колонны дополнительно содержит дальномерный инструмент 124 для создания тока в соседних проводниках, таких как трубы, колонны обсадных труб и проводящие пласты, а также для сбора результатов измерений результирующего поля для определения расстояния и направления. Используя эти измерения в сочетании с измерениями ориентации инструмента, бурильщик может, например, направить буровое долото 114 вдоль желаемой траектории 126 по отношению к существующей скважине 128 в пласте с использованием любой из различных пригодных систем направленного бурения, включая направляющие устройства, «кривой переводник» и роторную управляемую систему. Для точности навигации направляющие устройства могут представлять собой наиболее желаемый направляющий механизм. В альтернативном варианте направляющий механизм может управляться в глубине скважины, посредством скважинного контроллера, запрограммированного так, чтобы следовать за существующей скважиной 128 на заданном расстоянии 130 и в заданном расположении (например, непосредственно над или под существующим стволом скважиной).
[0020] Телеметрический переводник 132, присоединенный к скважинным инструментам (включая дальномерный инструмент 124), передает данные телеметрии на поверхность посредством гидроимпульсной телеметрии. Передатчик в телеметрическом переводнике 132 модулирует сопротивление потоку бурового раствора для создания импульсов давления, которые распространяются вдоль потока раствора со скоростью звука на поверхность. Один или более датчиков давления 134 преобразовывают сигнал давления в электрический сигнал (сигналы) для преобразователя 136 сигналов. Следует отметить, что существуют и могут быть использованы другие формы телеметрии для передачи сигналов с глубины скважины на преобразователь. Такая телеметрия может включать акустическую телеметрию, электромагнитную телеметрию или телеметрию через проводную бурильную трубу.
[0021] Преобразователь 136 передает телеметрические сигналы в цифровом виде через канал связи 138 на компьютер 140 или устройство обработки данных какого-либо другого вида. Компьютер 140 работает в соответствии с программным обеспечением (которое может храниться на носителе информации 142) и входными данными пользователя, вводимыми посредством устройства ввода 144, для обработки и декодирования принятых сигналов. Затем полученные данные телеметрии могут быть проанализированы и обработаны с использованием компьютера 140 для генерирования отображения полезной информации на мониторе компьютера 146 или устройстве отображения какого-либо другого вида. Например, бурильщик может использовать эту систему для получения и контроля параметров бурения, характеристик пласта и траектории ствола скважины по отношению к существующему стволу 128 скважины и каким-либо обнаруженным границам пласта. Затем нисходящий канал связи может быть использован для передачи команд управления с поверхности на компоновку низа бурильной колонны.
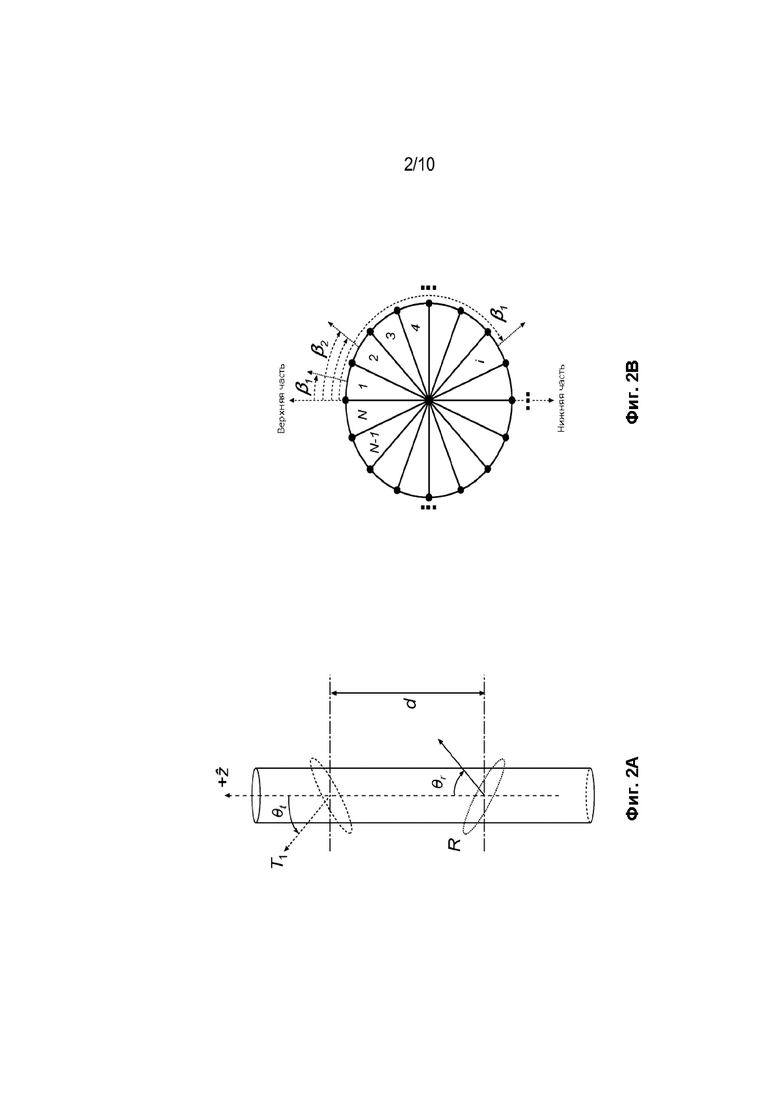
[0022] Фиг. 2А иллюстрирует приведенную в качестве примера модель инструмента, имеющую продольную ось, которая совпадает с координатной осью z. Предоставлена катушка антенны передатчика T1 с углом наклона θT1 относительно оси z и катушка антенны приемника R с углом наклона θR относительно оси z, при этом обычно ее вектор нормали находится в той же плоскости, которая определена осью z и вектором нормали катушки антенны передатчика. Катушки антенн передатчика и приемника расположены по центру оси z со своими центральными точками, разделенными расстоянием d. Оси x и y приведенной в качестве примера модели инструмента проиллюстрированы на Фиг. 2B, которая иллюстрирует приведенную в качестве примера конфигурацию положений бинов инструментов и соответствующих азимутальных углов. Ось x направлена от оси z к верхней части ствола скважины. (В случае вертикальных стволов скважин северную часть ствола скважины часто принимают как «верхнюю» часть.) Ось y проведена перпендикулярно осям x и z с использованием правила правой руки. Азимутальный угол β измеряется от оси х, начиная в направлении оси y. Измерения, выполненные по окружности ствола скважины, часто группируются в азимутальные бины. Как проиллюстрировано на Фиг. 2B, каждый бин i может быть связан с типовым азимутальным углом βi. В альтернативном варианте измерения могут быть сгруппированы в бины по оси z.
[0023] Способы и устройства, описанные в данном документе, могут быть использованы в различных конфигурациях ствола скважины, таких как ствол скважины, в том числе, например, вертикально ориентированная конфигурация ствола скважины, горизонтальное направление проникновения или наклонная конфигурация ствола скважины. Кроме того, хотя пример на Фиг. 1 также, в основном, иллюстрирует пример наземного применения, устройства и методы, описанные в данном документе, могут также использоваться в шельфовых средах, например, для подводных работ. В частности, шельфовые или подводные работы могут включать использование устройств и методов каротажа во время бурения/измерений во время бурения (КВБ/ИВБ), включая аспекты приведенных в данном документе примеров.
[0024] Методы магнитной дальнометрии КВБ, в которых используют каротажные инструменты электромагнитного удельного сопротивления на основании, например, моделей инструментов, описанных на Фиг. 2А-2В, определяют относительное расстояние и направление между двумя скважинами с использованием наклонно расположенных передатчиков в каротажном инструменте. Передатчики передают в пласт электромагнитные сигналы, которые индуцируют ток в смежной целевой скважине (с обсадной колонной), например, наклонно расположенный приемник в каротажном инструменте выполнен с возможностью определения относительного направления и расстояния до целевой скважины на основании значений полученных азимутальных измерений. Это означает, что индуцированный ток в целевой скважине генерирует электромагнитное поле, которое принимается наклонно расположенным приемником в каротажном инструменте.
[0025] Азимутальный сигнал, принятый приемником, может быть представлен с помощью следующего уравнения:
 (βi) = Aдвойн. cos2(βi + β0) + Aодиночн.cos(βi + β0) + Aпостоян. (1)
(βi) = Aдвойн. cos2(βi + β0) + Aодиночн.cos(βi + β0) + Aпостоян. (1)
где βi представляет собой азимут инструмента, как проиллюстрировано на Фиг. 2B и β0 представляет собой угол между верхней частью инструмента и направлением к целевой скважине. Aдвойн., Aодиночн. и Aпостоян. являются комплексными числами, представляющими полученные амплитуды двойных синусоидальных, одиночных синусоидальных и постоянных сигналов соответственно по отношению к азимутальным углам инструмента.
[0026] Большая часть сигнала (например, электромагнитного поля, генерированного индуцированным током вдоль обсадной колонны целевой скважины), полученного из целевой скважины, представляет собой Aдвойн. таким образом, что двойные синусоидальные отклики используются для определения относительного расстояния и направления к целевой скважине. Благодаря двойным периодам, два угла рассчитаны для относительного направления к целевой скважине, что приводит к неоднозначности в определении направления методом дальнометрии. Одиночные синусоидальные отклики с одним периодом используются для устранения таких неоднозначностей. Однако сигнал Aдвойн. является слабым, если каротажный инструмент расположен слишком далеко от целевой скважины (в зависимости от выбранной рабочей частоты). Следовательно, такие вопросы неоднозначности влияют на решения дальнометрии и представляют собой сложную задачу, если необходимы дополнительные диапазоны обнаружения. Возбуждение тока в глубине скважины (например, регулируемый источник тока или напряжения), наводимое кабельной системой в обсаженной целевой скважине, может быть использовано для определения правильного направления методом дальнометрии.
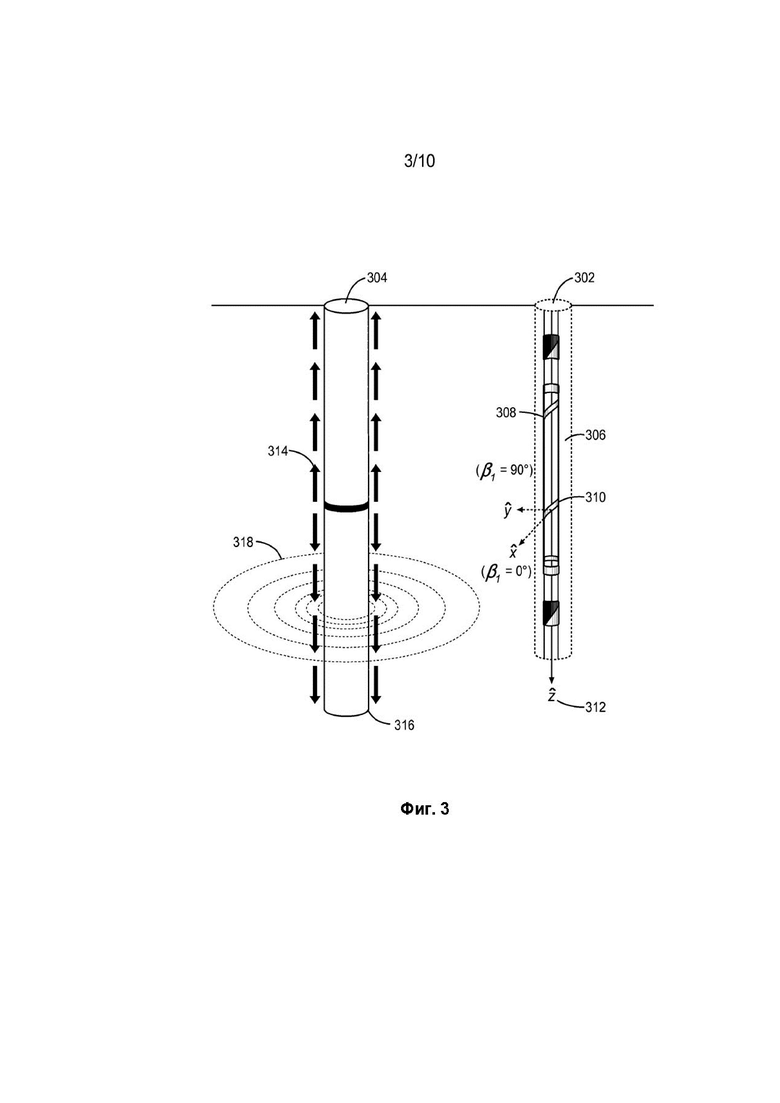
[0027] Фиг. 3 иллюстрирует приведенную в качестве примера систему, показывая типичный вариант применения ПГД, который имеет два источника возбуждения, при этом один источник возбуждения и приемник находятся в буровой скважине 302 и параллельны целевой скважине 304, включая другой источник возбуждения. Инструмент КВБ 306, расположенный в буровой скважине 302, оснащен передатчиком 308 и приемником 310. Координаты инструмента КВБ 306 проиллюстрированы на Фиг. 3, где направление оси y (соответствующее азимуту инструмента 90 градусов) указывает на целевую скважину 304, а направление оси z находится вдоль траектории бурения 312. В этом примере скважинный источник возбуждения тока (например, регулируемый источник либо тока, либо напряжения) расположен внутри целевой скважины 304 с заземлением, расположенным в различных местах на поверхности или в устье целевой скважины 304. Скважинный источник возбуждения тока (не показан) целевой скважины 304 дает ток 314, который течет вдоль обсадной колонны 316 целевой скважины 304 и генерирует магнитное поле, 318, которое окружает целевую скважину 304.
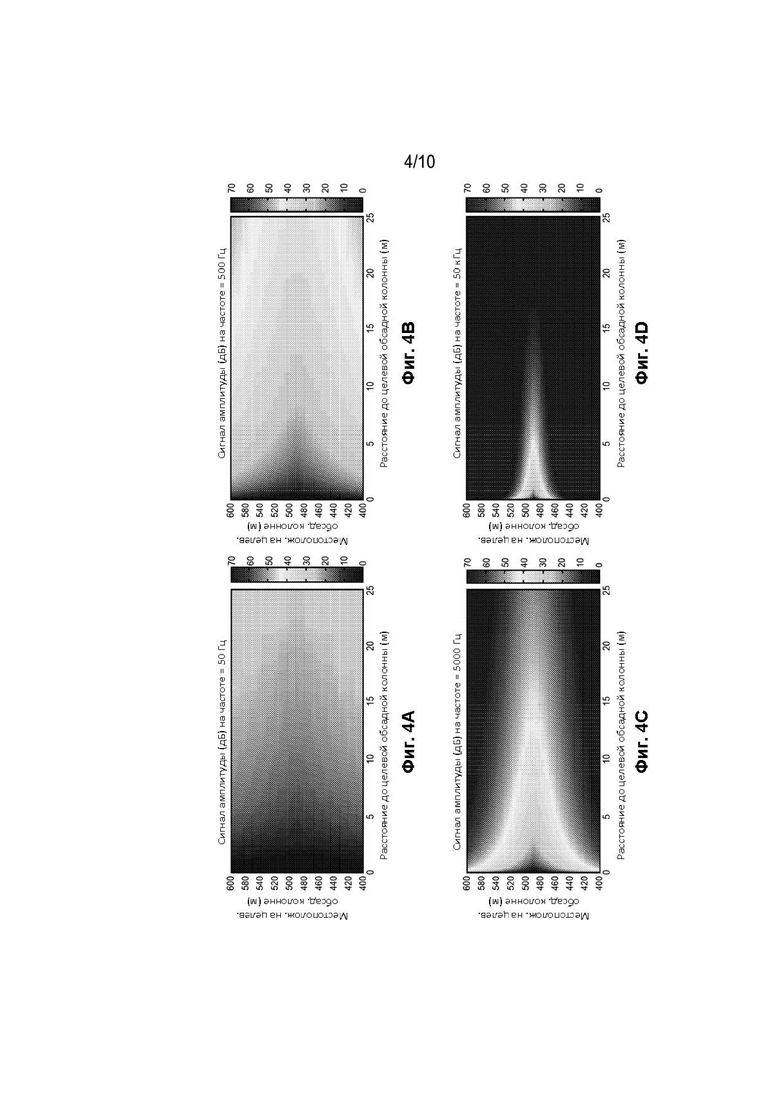
[0028] Фиг. 4А-4D иллюстрируют приведенные в качестве примера смоделированные амплитуды (в дБ) магнитных полей, окружающих источники возбуждения в целевых скважинах. Как проиллюстрировано, источники возбуждения на более низких частотах передают больше сигналов на приемник, расположенный в непосредственной близости от буровой скважины (например, приемник 310 в буровой скважине 302 на Фиг. 3), для одного и того же расстояния до целевой обсадной колонны. Однако на измерения на очень низких частотах могут оказывать влияние магнитное поле и вращение Земли в связи с операциями вращения при КВБ. Таким образом, приведенная в качестве примера рабочая частота 50 кГц (связанная с Фиг. 4D) используется для варианта применения дальнометрии с использованием ПГД, как проиллюстрировано на Фиг. 3, где типичные дальномерные расстояния находятся в пределах от 5 до 10 метров.
[0029] В приведенной в качестве примера операции приемник 310 в буровой скважине 302 принимает сигналы азимута, генерируемые в ответ на работу скважинного источника возбуждения тока (не показан) целевой скважины 304. Сигналы азимута графически представлены на Фиг. 5А-5B, а Фиг. 6А-6В иллюстрируют действительную и мнимую части сигнала отклика, принятых приемником 310. В частности, Фиг. 5А-5B иллюстрируют действительные части и мнимые части соответственно сигналов азимута, принятых приемником 310 по Фиг. 3, в буровой скважине 302 в связи с источником возбуждения в целевой скважине 304 на рабочей частоте 50 кГц. Фиг. 6А-6B иллюстрируют действительные части и мнимые части принятых сигналов азимута двойного синусоидального сигнала (например, Aдвойн.) на одном и том же приемнике 310 в связи с активацией передатчика 308 (также работающего на частоте 50 кГц) в буровой скважине 302 по Фиг. 3.
[0030] Двойная синусоида, проиллюстрированная на Фиг. 6А-6В, может использоваться для расчета расстояния и направления к целевой обсадной колонне. Однако, хотя целевая обсадная колонна 316 расположена под азимутальным углом 90 градусов по отношению к инструменту КВБ 306, расчеты отклика по азимуту, как проиллюстрировано на Фиг. 6А-6B, показывают получение двух разных азимутальных направлений (например, 90° и 270°) относительно целевой скважины 304. Ввиду своего двойного периода (например, cos2(βi + β0)), измеренный двойной синусоидальный отклик по азимуту будет также иметь 180° неоднозначности для измерения азимутального угла обсадной колонны. Поскольку одиночный синусоидальный отклик по азимуту имеет только один период (например, cos(βi + β0)), его можно использовать для устранения этой неоднозначности для однозначного определения азимутального угла. Затем расстояние можно рассчитать на основании амплитуд компонентов. Поэтому отклики по азимуту, проиллюстрированные на Фиг. 5А-5B, используются совместно с откликами по азимуту, проиллюстрированными на Фиг. 6А-6B, для устранения неоднозначности и определения того, какой азимутальный угол является направлением к целевой скважине 304.
[0031] Источник возбуждения целевой скважины 304 не обязательно должен быть постоянно активирован, так как отклики по азимуту, проиллюстрированные на Фиг. 5А-5B, используются только для идентификации направления целевой скважины. Необходимо только несколько импульсов, соответствующих возбуждению в целевой скважине, чтобы устранить неоднозначность азимутального направления в связи с возбуждением передатчика 308 в буровой скважине 302. Следует также понимать, что, хотя в данном документе описаны расчеты направлений между скважинами, отклики по азимуту по Фиг. 5А-5B, с известными характеристиками обсадной колонны, могут быть разделены для определения расстояния между обсадными колоннами в буровой скважине 302 и целевой скважине 304.
[0032] В альтернативном варианте оба возбуждения (например, с откликами по азимуту, как проиллюстрировано на Фиг. 5А-5B и 6A-6B) из скважин могут быть объединены, чтобы свести к минимуму воздействия со стороны пласта (например, эффекты анизотропии пласта) при определении методом дальнометрии. Чтобы учесть как сигналы от обсадных колонн, так и сигналы от пласта, уравнение (1) может быть изменено и представлено с помощью следующего уравнения:
(βi) = AF (βi + β0) + AC (βi + β1) (2)
где AF (βi + β0) = AFдвойн.cos2(βi + β0) + AFодиночн.cos(βi + β0) + AFпостоян.; и AC (βi + β1) = ACдвойн.cos2(βi + β1) + ACодиночн.cos(βi + β1) + ACпостоян.. AF и AC представляют собой сигнал от пласта и сигнал от целевой обсадной колонны соответственно в ответ на активацию передатчика в целевой скважине 304 по Фиг. 3. AFдвойн. и ACдвойн. представляют собой амплитуды упомянутых двойных синусоидальных откликов для сигнала от пласта и сигнала от обсадной колонны соответственно. AFодиночн. и ACодиночн. представляют собой амплитуды упомянутых одиночных синусоидальных откликов для сигнала от пласта и сигнала от обсадной колонны соответственно. AFпостоян. и ACпостоян. представляют собой амплитуды упомянутых постоянных откликов для сигнала от пласта и сигнала от обсадной колонны соответственно. Углы β0 и β1 являются относительным азимутом между верхней частью инструмента и пластом (анизотропия пласта или границы пласта) и относительным азимутом между верхней частью инструмента и направлением целевой скважины соответственно.
[0033] С использованием относительно низкой рабочей частоты для передатчика 308 в буровой скважине 302 сигнал от пласта AF может быть исключен в силу того, что является относительно более слабым, чем сигнал от обсадной колонны AC. Следовательно, сигнал от пласта (включая анизотропию пласта и влияние соседних пластов) является пренебрежимо малым при работе на низких частотах. Таким образом, сигнал от обсадной колонны AC может быть отделен от принятого сигнала посредством уравнения(2), если известно β1 из сигналов в связи с возбуждением тока в целевой скважине по Фиг. 5A-5B.
[0034] Если передатчик 308 работает на сравнительно высоких частотах так, что сигнал от пласта AF гораздо сильнее, чем сигнал от обсадной колонны AC, тогда принятый сигнал в уравнении (2) может использоваться только для определения относительного азимутального угла пласта β0. С известным β0, исходя из значений высокочастотных измерений, и известным β1, исходя из значений измерений возбуждения тока, уравнение (2) может быть отделено для расчета характеристик пласта (например, удельное сопротивление, анизотропия и т. д.) и расстояния до обсадной колонны. Следует отметить, что как в антеннах в буровой скважине, так и в случаях возбуждения тока в целевой скважине (скважинах) используется более чем одна рабочая частота. Такие многочастотные измерения могут использоваться для того, чтобы установить различия между сигналами от обсадной колонны и сигналами от пласта для достижения точного определения в дальнометрии.
[0035] Фиг. 7A и 7B иллюстрируют две приведенные в качестве примера конфигурации источника возбуждения тока 700 в целевой скважине 704. Аналогично примеру на Фиг. 3, система содержит два источника возбуждения, при этом один источник возбуждения и приемник расположены в буровой скважине 702 и параллельны целевой скважине 704, включая другой источник возбуждения (например, источник возбуждения тока 700). Инструмент КВБ 706, расположенный в буровой скважине 702, оснащен передатчиком 708 и приемником 710. Координаты инструмента КВБ 706 проиллюстрированы на Фиг. 7А и 7В, где направление оси y (соответствующее азимуту инструмента 90 градусов) указывает на целевую скважину 704, а направление оси z находится вдоль траектории бурения 712. В этих примерах скважинный источник возбуждения тока 700 (например, регулируемый источник либо тока, либо напряжения) расположен внутри целевой скважины 704 с заземлением 714, расположенным в устье скважины (например, Фиг. 7А) или вдали от устья скважины на поверхности (например, Фиг. 7B), для оптимизации потока тока вглубь пласта.
[0036] Фиг. 8 иллюстрирует альтернативную конфигурацию, в которой вместо возбуждения в глубине скважины используется наземный источник возбуждения 800 в устье скважины, чтобы дать возможность току течь в глубине целевой скважины. Эта конфигурация включает два источника возбуждения, при этом один источник возбуждения и приемник расположены в буровой скважине 802 и параллельны целевой скважине 804, при этом источник возбуждения 800 находится в устье скважины. Инструмент КВБ 806, расположенный в буровой скважине 802, оснащен передатчиком 808 и приемником 810. Координаты инструмента КВБ 806 проиллюстрированы на Фиг. 8, где направление оси y (соответствующее азимуту инструмента 90 градусов) указывает на целевую скважину 804, а направление оси z находится вдоль траектории бурения 812. В этом примере источник возбуждения тока (например, регулируемый источник либо тока, либо напряжения) является наземным источником возбуждения 800, расположенным в устье целевой скважины 804. Наземный источник возбуждения 800 целевой скважины 804 дает ток 814, который течет в глубине скважины вдоль обсадной колонны 816 целевой скважины 804 и генерирует магнитное поле, 818, которое окружает целевую скважину 804. В этом примере заземление 820 расположено вдали от устья скважины для увеличения тока 814, протекающего в скважине.
[0037] Фиг. 9 иллюстрирует приведенную в качестве примера конфигурацию вида сверху множества целевых скважин, окружающих буровую скважину 902. Целевые скважины 904, 906 и 908 (например, представляющие цели в виде скважины № 1, скважины № 2 . . . скважины № N) обсаживают, и они выступают в качестве направляющих скважин для буровой скважины 902. Токи наводятся вдоль обсадных колонн целевых скважин в соответствии с различными конфигурациями возбуждения, описанными в данном документе, а магнитные поля измеряются для получения откликов по азимуту посредством приемника, расположенного в буровой скважине 902.
[0038] Отклики по азимуту в ответ на активацию передатчика в буровой скважине 902, для определения местоположений множества скважин, могут быть выражены следующим уравнением:
(βi) = AF (βi + β0) + AC1 (βi + β1) + AC2 (βi + β2) + … + ACN (βi + βN) (3)
где диапазон от AC1 до ACN представляет собой амплитуды азимутальных сигналов, сформированных обсадными колоннами от скважины № 1 до скважины № N вблизи буровой скважины 902 соответственно. AF (βi + β0) может быть пренебрежимо малым в случае, когда передатчик в буровой скважине 902 работает в низкочастотных диапазонах. Путем создания возбуждения в конкретной целевой скважине (например, целевая скважина 904/скважина № 1) принятый сигнал в буровой скважине 902 выполнен с возможностью определения относительного азимутального направления (β1 по отношению к скважине № 1) к целевой скважине 904. Таким образом, отклик по азимуту в уравнении (3) может быть отделен с использованием всех определенных относительных азимутальных углов для каждой скважины, и, таким образом, отделенные отклики (AC1 по отношению к скважине № 1) могут быть использованы, чтобы рассчитать расстояние до целевой скважины 904 (например, скважина № 1). Аналогичные способы могут быть применены для расчета расстояния до других целевых скважин (например, целевые скважины 904, 906/скважины от 2 до N).
[0039] Как уже отмечалось ранее, расстояние между скважинами может быть определено на основании амплитуд откликов по азимуту. Азимутальная зависимость измерений, полученные приемником, анализируется для определения диагональной составляющей и поперечной составляющей во время вращения инструмента КВБ. Передача и измерение повторяются в ходе вращений инструмента КВБ для определения азимутальной зависимости сигнала отклика, а затем их анализируют для определения диагональной составляющей и поперечной составляющей. Амплитуда диагональной составляющей указывает на расстояние до электропроводящего объекта (например, обсадной колонны целевой скважины). Направление может быть определено только на основании диагональной составляющей или в сочетании с поперечной составляющей. Аппроксимация синусоидальной кривой может быть применена для повышения точности оценки расстояния и направления. В приведенной в качестве примера операции диагональная составляющая является более предпочтительной в качестве основания для расчета расстояния обсадной колонны.
[0040] Далее со ссылкой на Фиг. 10, блок-схема иллюстрирует приведенный в качестве примера способ 1000 получения множественной дальнометрии путем применения алгоритма комплексной инверсии к откликам из различных источников возбуждения. В соответствии с раскрытием по данной заявке в буровой скважине могут быть использованы различные конфигурации антенны, такие как многокомпонентные антенны и различные количества антенн, хотя они описаны в контексте использования одного наклонно расположенного передатчика и одного наклонно расположенного приемника. К тому же, антенны в буровой скважине также могут определять характеристики пласта без помех со стороны соседней обсадной колонны на основании более высокочастотных измерений.
[0041] Начиная с операции 1002, блок управления на поверхности начинает цикл измерений, давая команды по работе источников возбуждения в буровой и целевой скважинах. В операции 1004 антенна (антенны) инструмента в буровой скважине передает электромагнитные сигналы в окружающие пласты, при этом отклики по азимуту поступают на приемник инструмента в буровой скважине в операции 1006. Измеренные отклики могут быть необязательно использованы для определения удельного сопротивления пласта в операции 1008.
[0042] В операции 1010 блок управления продолжает цикл измерений тем, что дает команду на работу источника возбуждения в целевой скважине (например, целевая скважина № 1) для передачи электромагнитных сигналов в окружающие пласты. В операции 1012 отклики по азимуту поступают на приемник инструмента в буровой скважине. Иными словами, источник возбуждения целевой скважины индуцирует ток, который протекает вдоль обсадной колонны в глубине целевой скважины, и генерирует магнитное поле, которое окружает целевую скважину (например, целевую скважину № 1). Приемник инструмента в буровой скважине принимает отклики по азимуту от магнитного поля в операции 1012 и определяет азимутальный угол между буровой скважиной и целевой скважиной № 1 в операции 1014. Описанные выше операции могут быть повторены для любого количества N соседних целевых скважин (например, с использованием операций 1020, 1022 и 1024) для достижения многоскважинной дальнометрии.
[0043] После того как система осуществила измерение откликов по азимуту в различные целевые скважины, в операции 1016 применяется комплексная инверсия, чтобы отделить сигналы от пласта от сигналов от обсадной колонны в целевых скважинах (например, целевые скважины от № 1 до № N). Кроме того, расстояние от буровой скважины до целевой скважины рассчитывают в операции 1018 путем использования отделенных откликов амплитуд азимутальных сигналов, сформированных обсадными колоннами целевых скважин (например, AC1 по отношению к целевой скважине № 1).
[0044] В одном варианте реализации настоящее изобретение может быть реализовано как набор машинных команд на машиночитаемом носителе, содержащем ПЗУ, ОЗУ, CD, DVD, жесткий диск, устройство флэш-памяти, или любом другом машиночитаемом носителе, известном или неизвестном, которые при выполнении вызывают в компьютерной системе, такой как компьютер, согласно проиллюстрированному на Фиг. 1, или устройство обработки данных какого-либо другого вида, выполнение способа в соответствии с настоящим изобретением, например, способа, описанного на Фиг. 10.
[0045] Хотя в примерах на Фиг. 10 операции расположены последовательно, в других примерах порядок следования операций может изменяться, может быть исключена одна или более операций, и/или две или более операций могут выполняться параллельно с использованием множества процессоров или одного процессора, выполненного в виде двух или более виртуальных машин или подпроцессоров. Кроме того, в еще одних примерах могут быть реализованы операции в виде одного или более специализированных взаимосвязанных аппаратных модулей или модулей на интегральных схемах с применением соответствующих сигналов управления и сигналов данных, передаваемых между модулями и посредством этих модулей. Таким образом, любая последовательность операций способа применима к программному, программно-аппаратному, аппаратному обеспечению и гибридным вариантам реализации.
[0046] Предполагают, что диапазон и показатели системы могут быть расширены за счет использования множества принимающих антенных станций и/или множества передающих антенных станций. Во многих ситуациях может быть необязательно производить точные расчеты расстояния и направления. Например, составляющие сигнала могут быть извлечены и преобразованы в пиксельные цвета или пиксельную интенсивность и отображены как функция местоположения и азимута инструмента. Если предположить, что целевая обсадная колонна находится в пределах диапазона обнаружения, на изображении она будет выглядеть как яркая (или, если предпочтительно, темная) полоса. Цвет или яркость полосы указывает на расстояние до обсадной колонны, а положение полосы указывает на направление до обсадной колонны. Таким образом, в результате просмотра такого изображения бурильщик может довольно интуитивно определить, смещается ли новый ствол скважины от желаемой траектории, и он или она может быстро инициировать корректирующее действие. Например, в случае, когда полоса становится более тусклой, бурильщик может направить бурение к обсадной колонне. И наоборот, в случае, когда полоса становится более яркой, бурильщик может направить бурение дальше от обсадной колонны. В случае, когда полоса отклоняется от желаемого положения непосредственно выше или ниже обсадной колонны, бурильщик может направить бурение в сторону, чтобы возобновить желаемое направленное отношение между стволами скважины.
[0047] Иные многочисленные изменения и модификации станут очевидными для специалистов в данной области техники после полного ознакомления с приведенным выше раскрытием изобретения. Например, вышеуказанное объяснение было направлено на выполнение каротажа во время бурения, но раскрытые методы также подходят для варианта реализации тросового инструмента. Например, многокомпонентные измерения посредством антенны могут быть использованы для получения виртуально управляемых измерений посредством антенны без необходимости вращения инструмента или антенн. Предполагается, что нижеследующая формула изобретения будет интерпретирована как охватывающая все такие изменения и модификации.
[0048] В данном описании ссылки на «один вариант реализации изобретения» или «вариант реализации изобретения», или «один пример», или «пример» означают, что отличительное свойство, на которое делается ссылка, присутствует или, возможно, содержится по меньшей мере в одном варианте реализации изобретения или примере изобретения. Отдельные ссылки на «вариант реализации изобретения» или «один вариант реализации изобретения», или «один пример», или «пример» в этом описании не обязательно относятся к одному и тому же варианту реализации изобретения или примеру; однако такие варианты реализации изобретения не являются взаимно исключающими, пока такое не утверждается или не будет довольно очевидно специалистам в данной области техники, извлекающим пользу из ознакомления с раскрытием данного изобретения. Таким образом, раскрытие настоящего изобретения включает множество комбинаций и/или интеграций вариантов реализации изобретения и примеров, описанных в данном документе, а также дополнительные варианты реализации изобретения и примеры, попадающие в объем формулы изобретения, основанной на раскрытии данного изобретения, а также все законные эквиваленты такой формулы изобретения.
[0049] Сопроводительные графические материалы, которые составляют часть данного документа, указывают на примере иллюстраций, а не ограничений, на конкретные варианты реализации изобретения, в которых объект изобретения может быть осуществлен на практике. Проиллюстрированные варианты реализации изобретения описаны с детализацией, достаточной для предоставления специалистам в данной области техники возможности практического осуществления принципов, изложенных в данном документе. Несмотря на то, что в настоящем документе проиллюстрированы и описаны конкретные варианты реализации изобретения, следует понимать, что любая конструкция, рассчитанная на достижение такой же цели, может быть подставлена вместо проиллюстрированных конкретных вариантов реализации изобретения. Настоящее раскрытие изобретения призвано охватить любые и все адаптации или вариации различных вариантов реализации изобретения. Возможно использование других вариантов реализации изобретения и производных от них таким образом, что возможны структурные и логические подстановки и изменения без отступления от объема, раскрытого в данном документе изобретения. Комбинации описанных выше вариантов реализации изобретения и других вариантов реализации изобретения, конкретно не описанных в данном документе, будут очевидны для специалистов в данной области техники после изучения приведенного выше описания. Поэтому данному подробному описанию не следует придавать ограничительный смысл, и объем различных вариантов реализации изобретения определяется исключительно прилагаемой формулой изобретения, а также полным диапазоном эквивалентов, которые законно охватываются данной формулой изобретения.
[0050] Для применения объекта изобретения могут быть использованы многие другие варианты реализации изобретения, отличные от описанных в данном документе иллюстративных примеров, а также может быть сделано много структурных и операционных изменений в дополнение к альтернативам, конкретно описанным в данном документе, без отхода от объема объекта изобретения.
Изобретение относится к средствам дальнометрии в процессе бурения скважин и может быть использовано для определения расстояния и направления между соседними скважинами. Техническим результатом является расширение арсенала технических средств. В частности, предложен способ скважинной дальнометрии, включающий этапы, на которых: передают первый электромагнитный сигнал от передатчика, расположенного внутри буровой скважины; получают первый азимутальный сигнал приемником, расположенным внутри буровой скважины, в ответ на передачу первого электромагнитного сигнала; передают второй электромагнитный сигнал от источника возбуждения, расположенного внутри первой целевой скважины; получают второй азимутальный сигнал приемником, расположенным внутри буровой скважины, в ответ на передачу второго электромагнитного сигнала; применяют комплексную инверсию между первым и вторым азимутальными сигналами; и определяют азимутальное направление от буровой скважины до первой целевой скважины по меньшей мере частично на основании комплексной инверсии. 3 н. и 17 з.п. ф-лы, 17 ил.
1. Способ скважинной дальнометрии, включающий этапы, на которых:
передают первый электромагнитный сигнал от передатчика, расположенного внутри буровой скважины;
получают первый азимутальный сигнал приемником, расположенным внутри буровой скважины, в ответ на передачу первого электромагнитного сигнала;
передают второй электромагнитный сигнал от источника возбуждения, расположенного внутри первой целевой скважины;
получают второй азимутальный сигнал приемником, расположенным внутри буровой скважины, в ответ на передачу второго электромагнитного сигнала;
применяют комплексную инверсию между первым и вторым азимутальными сигналами; и
определяют азимутальное направление от буровой скважины до первой целевой скважины по меньшей мере частично на основании комплексной инверсии.
2. Способ по п. 1, отличающийся тем, что передатчик входит в состав утяжеленной бурильной трубы или скважинного каротажного инструмента.
3. Способ по п. 1, в котором дополнительно первый и второй азимутальные сигналы поступают от различных источников возбуждения, а применение комплексной инверсии включает этап, на котором применяют алгоритм комплексной инверсии к полученным первому и второму азимутальным сигналам.
4. Способ по любому из пп. 1-3, дополнительно включающий этапы, на которых:
передают третий электромагнитный сигнал от источника возбуждения, расположенного внутри второй целевой скважины;
получают третий азимутальный сигнал приемником, расположенным внутри буровой скважины, в ответ на передачу третьего электромагнитного сигнала; и
определяют азимутальное направление от буровой скважины до второй целевой скважины с использованием полученных первого и третьего азимутальных сигналов.
5. Способ по п. 4, дополнительно включающий этап, на котором определяют расстояние от буровой скважины до первой и второй целевых скважин после определения азимутального направления от буровой скважины до первой и второй целевых скважин.
6. Способ по п. 5, отличающийся тем, что определение расстояния от буровой скважины до целевой скважины включает этап, на котором расчет осуществляют на основании амплитуд азимутальных сигналов, полученных от различных источников возбуждения.
7. Способ по п. 6, отличающийся тем, что определение расстояния от буровой скважины до целевой скважины дополнительно включает этап, на котором осуществляют разделение сигнала от пласта и сигнала от обсадной колонны от полученных азимутальных сигналов путем изменения рабочих частот передатчика, расположенного внутри буровой скважины.
8. Способ по любому из пп. 1-3, отличающийся тем, что первый и второй азимутальные сигналы, полученные приемником, пропорциональны

где βi представляет собой азимутальный бин, а β0 представляет собой угол между верхней частью инструмента, расположенного внутри буровой скважины, и направлением к целевой скважине.
9. Буровая система для многоскважинной дальнометрии, содержащая:
антенну передатчика, выполненную с возможностью передачи первого электромагнитного сигнала в окружающий пласт и антенну приемника, выполненную с возможностью приема сигналов отклика от окружающего пласта, при этом антенна передатчика и антенна приемника входят в состав утяжеленной бурильной трубы или скважинного каротажного инструмента, расположенного внутри буровой скважины;
источники возбуждения, расположенные вдоль множества целевых скважин, выполненные с возможностью передачи различных электромагнитных сигналов в окружающий пласт из различных целевых скважин;
контроллер, функционально соединенный с антенной передатчика и источниками возбуждения, выполненный с возможностью выдачи антенне передатчика и источникам возбуждения команды на передачу первого и иных различных электромагнитных сигналов в окружающий пласт, и при этом контроллер выполнен с возможностью применения комплексной инверсии к азимутальным сигналам, принятым от различных источников возбуждения;
определения азимутальных направлений от буровой скважины до множества целевых скважин по меньшей мере частично на основании комплексной инверсии;
разделения сигнала от пласта и сигналов от обсадных колонн из множества целевых скважин полученными азимутальными направлениями; и
определения расстояния от буровой скважины до множества целевых скважин после определения азимутальных направлений от буровой скважины до множества целевых скважин.
10. Буровая система по п. 9, отличающаяся тем, что источник возбуждения является скважинным источником возбуждения, расположенным в глубине целевой скважины.
11. Буровая система по п. 9, отличающаяся тем, что источник возбуждения является наземным источником возбуждения, расположенным в устье целевой скважины.
12. Буровая система по любому из пп. 9-11, дополнительно содержащая заземление в непосредственной близости от целевой скважины.
13. Буровая система по любому из пп. 9-11, отличающаяся тем, что по меньшей мере одна из: антенна передатчика и антенна приемника, расположена наклонно относительно оси инструмента.
14. Буровая система по любому из пп. 9-11, отличающаяся тем, что антенны передатчика и приемника расположены наклонно в одном и том же квадранте в совокупности противоположных квадрантов или в совокупности смежных квадрантов относительно оси инструмента.
15. Буровая система по любому из пп. 9-11, отличающаяся тем, что источник возбуждения индуцирует ток, протекающий вдоль обсадной колонны целевой скважины.
16. Скважинный дальномерный инструмент, содержащий:
антенну передатчика, выполненную с возможностью передачи первого электромагнитного сигнала в окружающий пласт;
антенну приемника, выполненную с возможностью приема сигналов отклика от окружающего пласта; и
контроллер, функционально соединенный с антенной передатчика и антенной приемника, выполненный с возможностью выдачи антенне передатчика команды на передачу первого электромагнитного сигнала в окружающий пласт, прием сигналов отклика из окружающего пласта и определение азимутального направления от скважинного дальномерного инструмента до целевой скважины по меньшей мере частично на основании комплексной инверсии к сигналам отклика, принятым антенной приемника.
17. Скважинный дальномерный инструмент по п. 16, отличающийся тем, что антенна передатчика и антенна приемника входят в состав утяжеленной бурильной трубы или скважинного каротажного инструмента, расположенного внутри буровой скважины.
18. Скважинный дальномерный инструмент по п. 16, отличающийся тем, что азимутальный сигнал отклика генерируется источником возбуждения, расположенным вдоль целевой скважины.
19. Скважинный дальномерный инструмент по любому из пп. 16-18, отличающийся тем, что контроллер определяет азимутальное направление от скважинного дальномерного инструмента до обсадной колонны целевой скважины по меньшей мере частично на основании сопоставления одиночного синусоидального азимутального сигнала отклика, принятого антенной приемника, с двойным синусоидальным азимутальным сигналом отклика.
20. Скважинный дальномерный инструмент по п. 19, отличающийся тем, что одиночный синусоидальный азимутальный сигнал отклика генерируется путем активации источника возбуждения, расположенного вдоль целевой скважины, и двойной синусоидальный азимутальный сигнал генерируется путем активации антенны передатчика, расположенной в буровой скважине.
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| US 6594584 B1, 15.07.2003 | |||
| US 5343152 A, 30.08.1994 | |||
| US 4372398 A, 08.02.1983 | |||
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ АМОРТИЗАТОР | 2011 |
|
RU2481506C1 |
| ОПРЕДЕЛЕНИЕ ГЕОМЕТРИИ СТВОЛОВ СКВАЖИН ВНУТРИ ОБСАЖЕННЫХ СКВАЖИН С ПОМОЩЬЮ МЕЖСКВАЖИННЫХ ЭЛЕКТРОМАГНИТНЫХ ИЗМЕРЕНИЙ | 2004 |
|
RU2342527C2 |

