[01] Область техники
[02] Изобретение относится к универсальной ручке для инструмента, которая может использоваться в составе различного садового инвентаря для обработки почвы, например, лопат, грабель, вил, культиваторов и т.д., а также другого типа ручного инструмента, удерживаемого с помощью обеих рук, например, транспортирующих тележек, ударных устройств и т.д.
[03] Уровень техники
[04] Наиболее близким аналогом изобретения является универсальная ручка для садового инструмента, описанная в публикации заявки США US2004129436, 08.07.2004. Известная ручка имеет стержневое основание, нижний конец которого снабжен узлом крепления для инструмента, а на верхнем конце закреплены две тяги в виде Г-образных элементов, имеющих рукоятки, ориентированные поперек оси основания.
[05] При использовании указанной рукоятки мышечная нагрузка на пользователя в некоторой степени снижается по отношению к работе с традиционным инструментом, где происходит захват обеими руками стержневого основания. Это связано с тем, что применение двух отдельных рукояток, ориентированных поперек оси основания, дают возможность пользователю занять анатомически более правильную позу и совершать поворотные движения, снижая нагрузку на мышцы спины, плеч и рук.
[06] Тем не менее, известная конструкция имеет недостатки, связанные с фиксированным расположением рукояток относительно основания. Пользователи имеют разные антропометрические показатели, что не учтено в данном устройстве, поскольку отсутствует возможность изменять положение рукояток для более удобного использования. В конструкции известной ручки не учитывается возможность применение различных типов инструментов (лопат, грабель, вил, культиваторов), которые подразумевает совершение движений разного типа и требует различного расположения рукояток. Кроме того, данный аналог крайне затруднительно использовать в условиях ограниченного пространства, поскольку для работы с ним пользователю требуется значительная свобода в постановке рук и ног.
[07] Раскрытие сущности изобретения
[08] Основной техническое проблемой, на решение которой направлено заявленного изобретение, является невозможность использования ручного инструмента, в частности почвообрабатывающих орудий, в условиях ограниченного пространства. Например, при рытье ям (под колодец, подвал и т.д.) у пользователя часто отсутствует свобода в движениях: он не может наклониться. развести локти, чтобы отбросить землю и т.д. Аналогичные трудности возникают, например, при рыхлении почвы среди преград (деревьев, кустарников, строительных конструкций и т.п.).
{09} Другой технической проблемой является отсутствие универсальности для подстраивания инструмента под индивидуальные антропометрические параметры пользователя, а также под конкретный тип инструмента.
[10] Таким образом задачей изобретение является адаптация ручки для работы в различных условиях, разными пользователями и для широкого типа инструментов.
[11] Технический результат изобретения заключается в обеспечении возможности использования ручки в составе инструмента в условиях ограниченного пространства и снижении мышечной нагрузки на пользователя при работе с ручкой за счет универсальности в настройке.
[12] Указанный технический результат достигается в изобретении за счёт того, что ручка инструмента содержит стержневое основание, узел крепления рабочего органа инструмента, размещенный на одном конце основания и две тяги, связанные с другим концом основания, расположенные с двух сторон относительно оси основания и снабженные рукоятками с захватными элементами, ориентированными поперек оси основания. Основание выполнено раздвижным и снабжено средством фиксации положения на заданной длине. При этом тяги соединены с основанием с возможностью поворота в плоскости, в которой лежит основание.
[13] Кроме того, для достижения технического результата предусмотрены частные варианты реализации изобретения, согласно которым:
[14] – ручка может быть снабжена шарнирным узлом для крепления тяг к основанию,
[15] - шарнирный узел может содержать содержит два разных шарнира или один общий шарнир для крепления тяг;
[16] – шарнирный узел может быть снабжен элементами для фиксации тяг в заданной угловом положении;
[17] – шарнирный узел может быть установлен с возможностью вращения относительно оси основания;
[18] – тяги могут быть выполнены раздвижными;
[19] – узел крепления рабочего органа инструмента может быть выполнен в виде зажима для трубчатого элемента;
[20] – узел крепления рабочего органа инструмента может быть установлен с возможностью изменения углового положения относительно оси основания.
[21] Использование в заявленном устройстве двух рукояток с захватными элементами, ориентированными поперек оси самого инструмента, имеет очевидное преимущество по отношению к традиционным устройствам, в части перераспределения усилий. При этом, в отличие от ближайшего аналога, в рассматриваемой конструкции ручки имеется также возможность регулировки углового положения тяг в плоскости инструмента (вертикальной плоскости). Это позволяет изменять вылет захватных элементов по отношению к оси основания, то дает возможность минимизировать амплитуду движения пользователя при работе. При этом наличие раздвижного основания позволяет подстроить инструмент под сложные условия эксплуатации. Таким образом, указанные особенности конструкции упрощают работу с инструментом в условиях ограниченного пространства. Кроме того, универсальность в настройке ручки позволяет снизить мышечную нагрузку на пользователя.
[22] Краткое описание чертежей
[23] Изобретение поясняется чертежами, где:
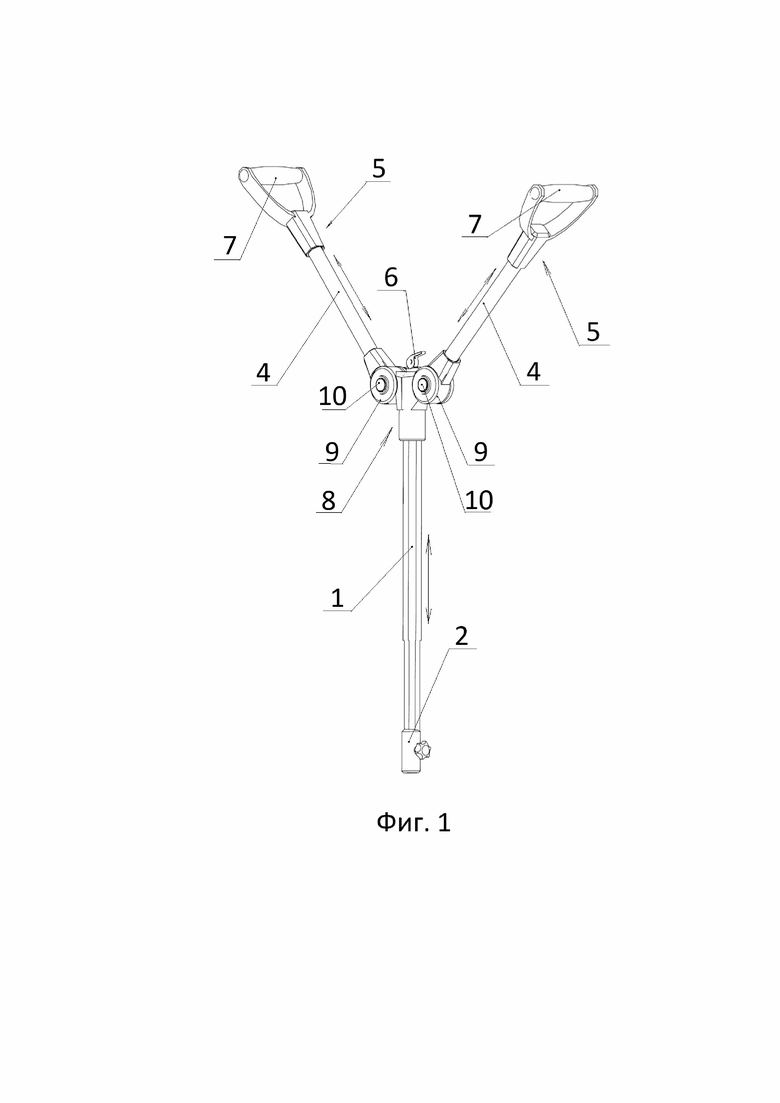
[24] На фигуре 1 показан общий вид универсальной ручки;
[25] На фигуре 2 показан вариант конструкции ручки с дополнительным шарниром;
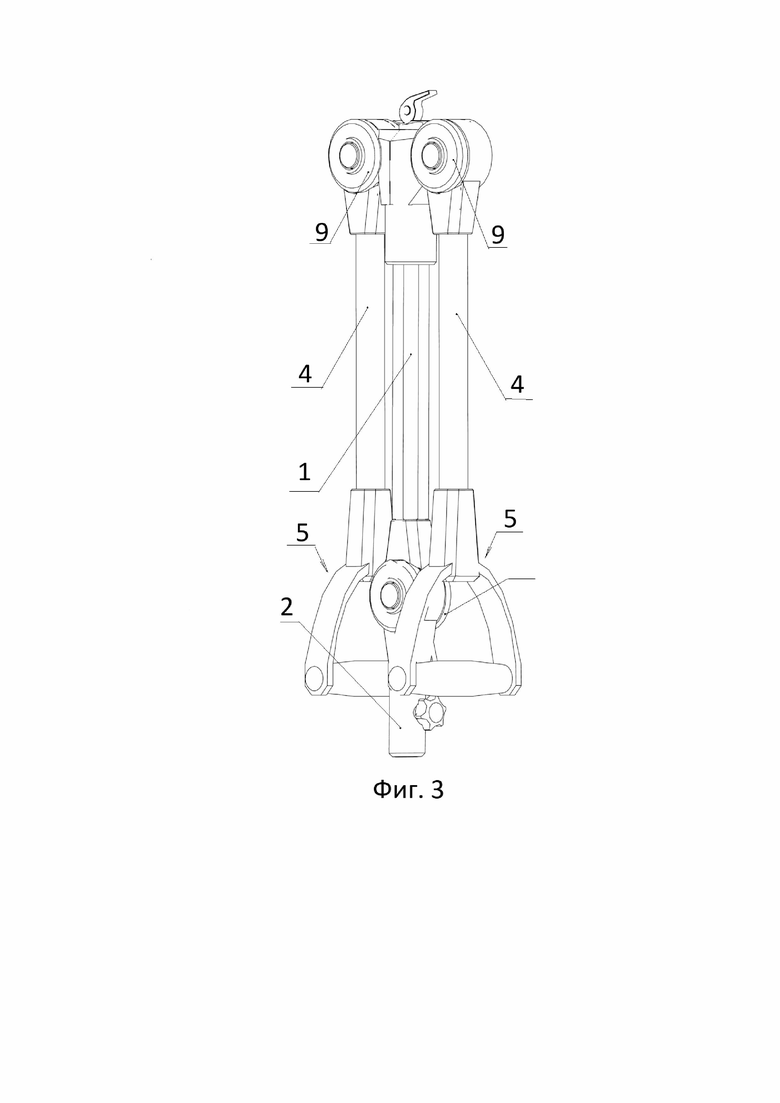
[26] На фигуре 3 показан вид ручки в сложенном виде;
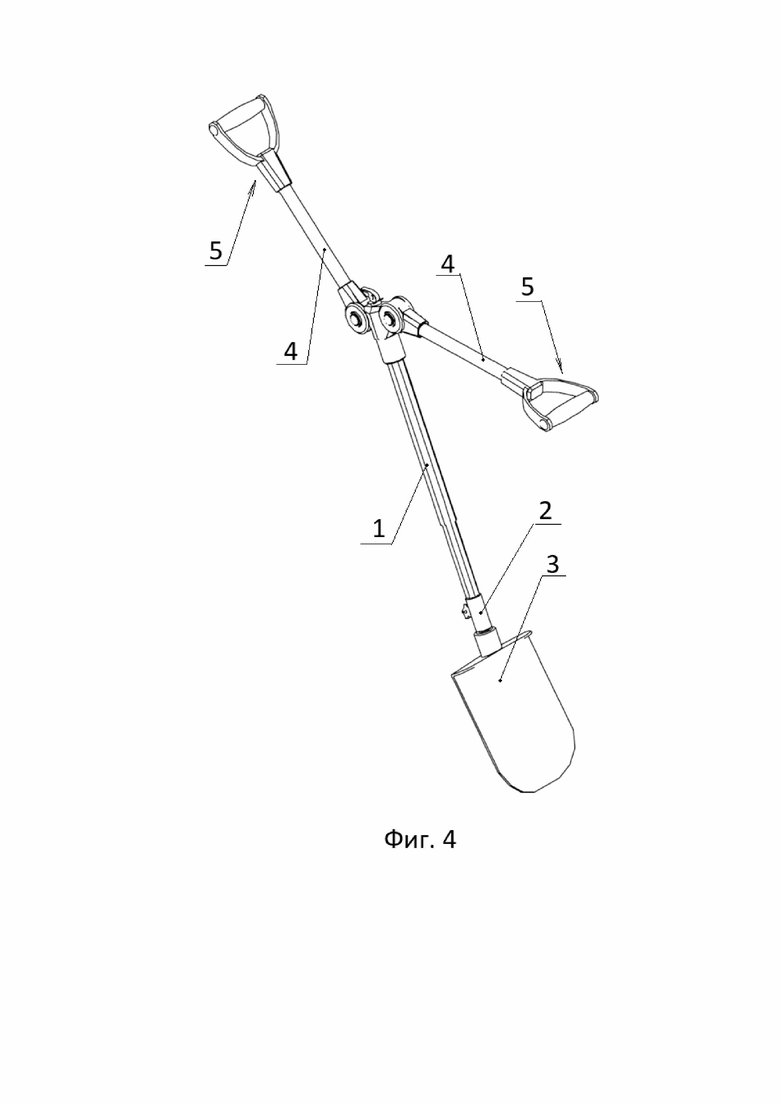
[27] На фигуре 4 показана конфигурация ручки в рабочем положении в составе лопаты;
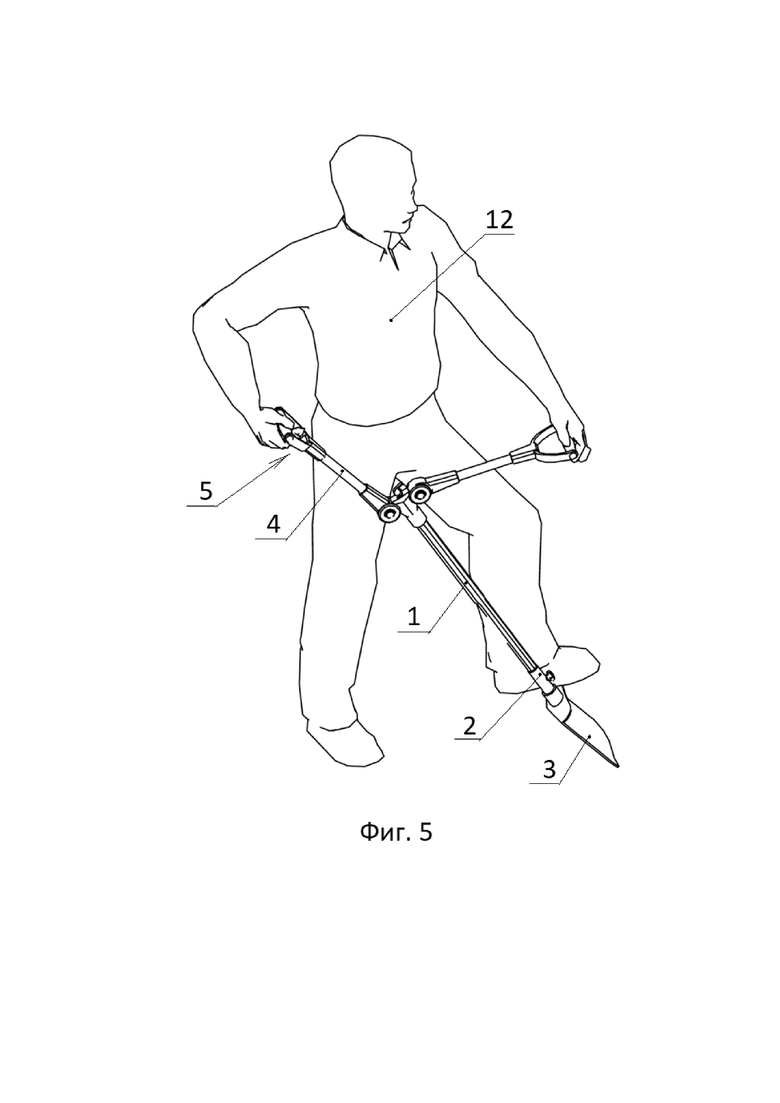
[28] На фигуре 5 показано положение пользователя с ручкой в рабочем положении в составе лопаты;
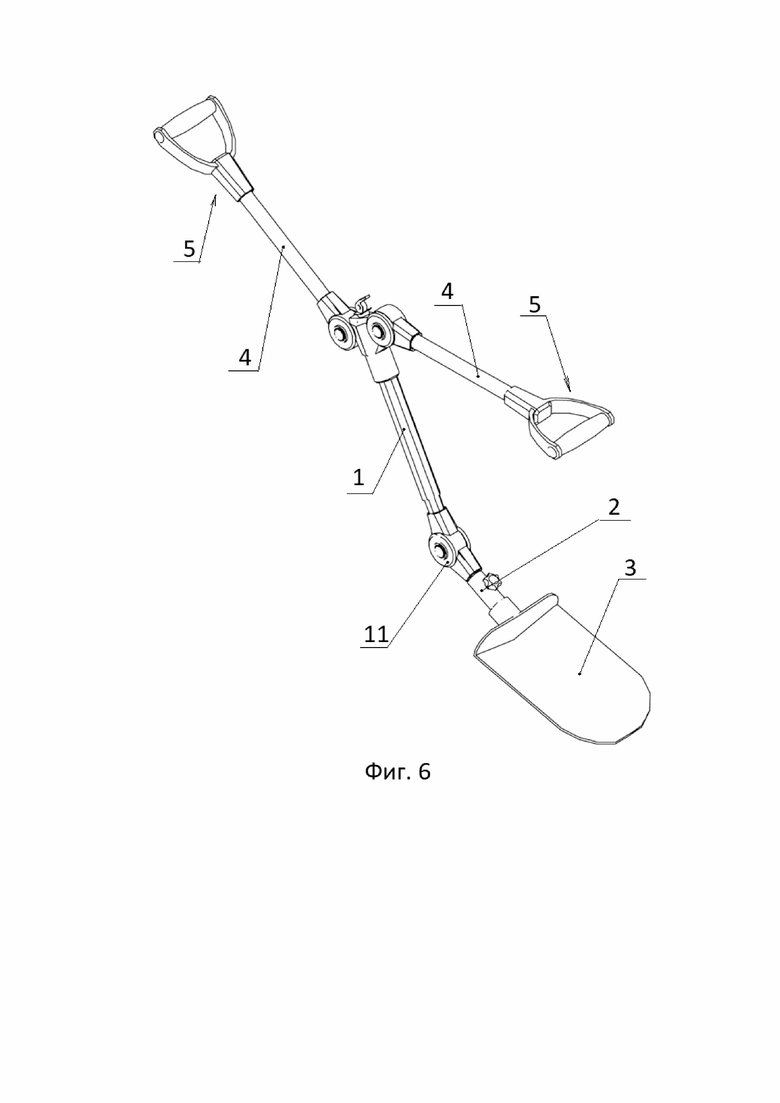
[29] На фигуре 6 показана конфигурация ручки в рабочем положении в составе совковой лопаты;
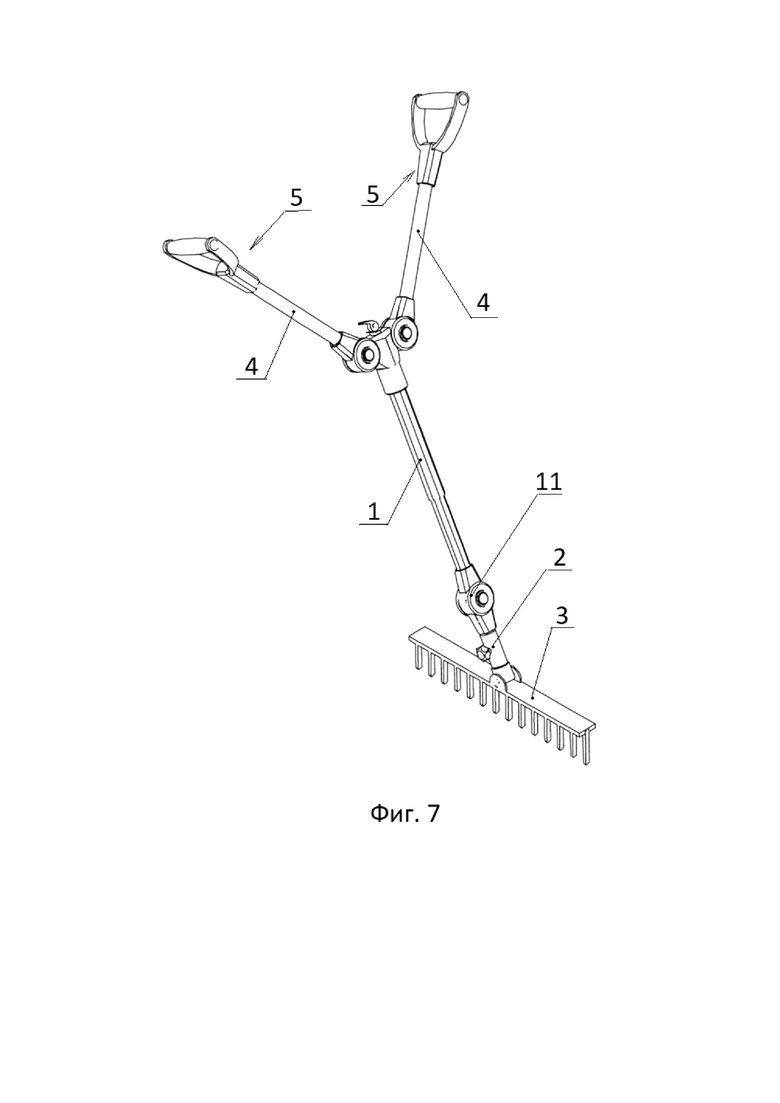
[30] На фигуре 7 показан конфигурация ручки в рабочем положении в составе грабель;
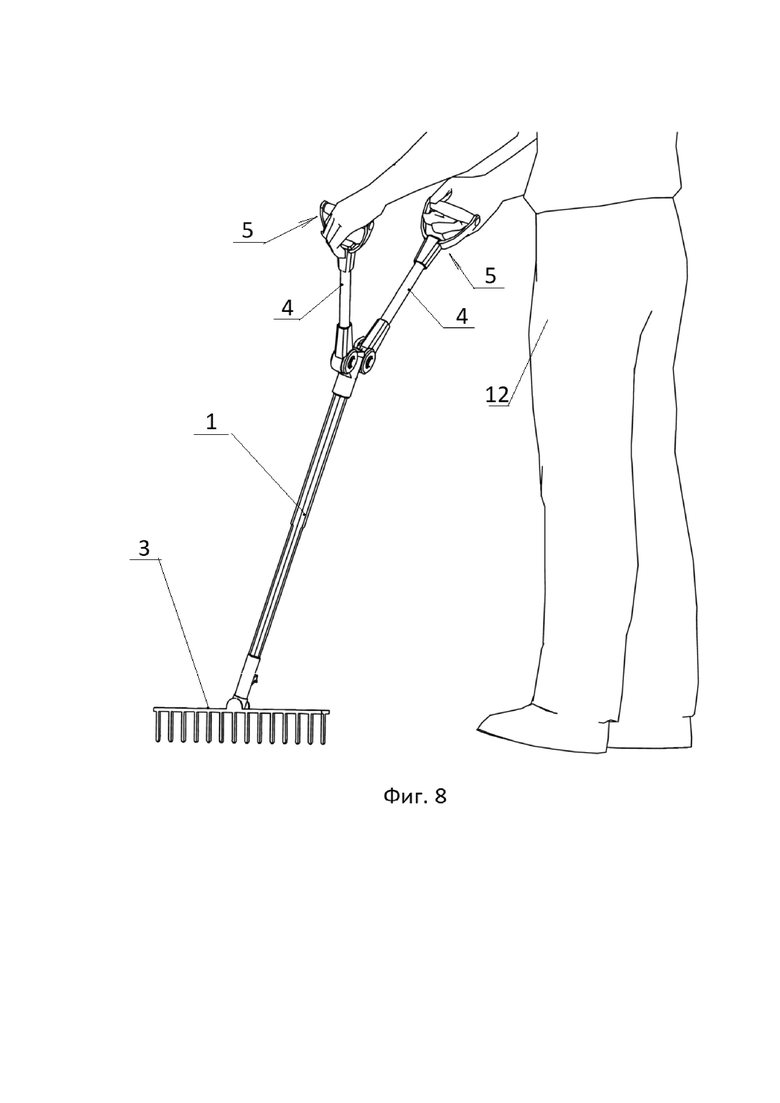
[31] На фигуре 8 показано положение пользователя с ручкой в рабочем положении в составе грабель;
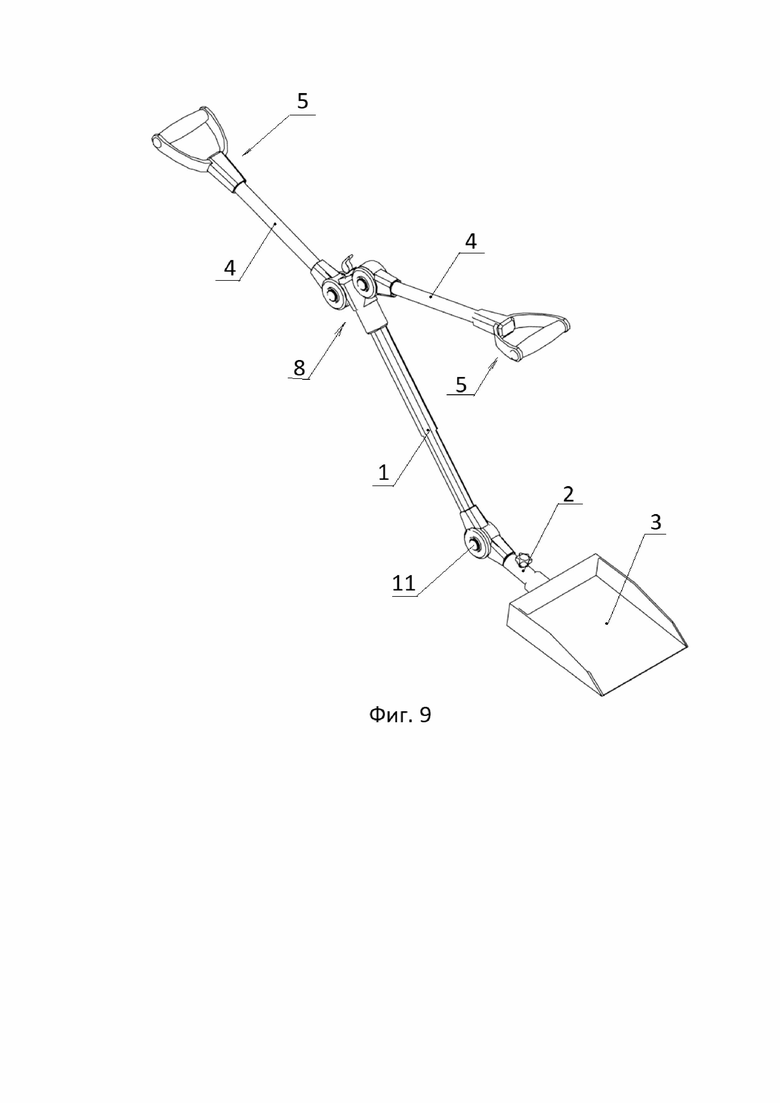
[32] На фигуре 9 показан один вариант конфигурация ручки в рабочем положении в составе снеговой лопаты;
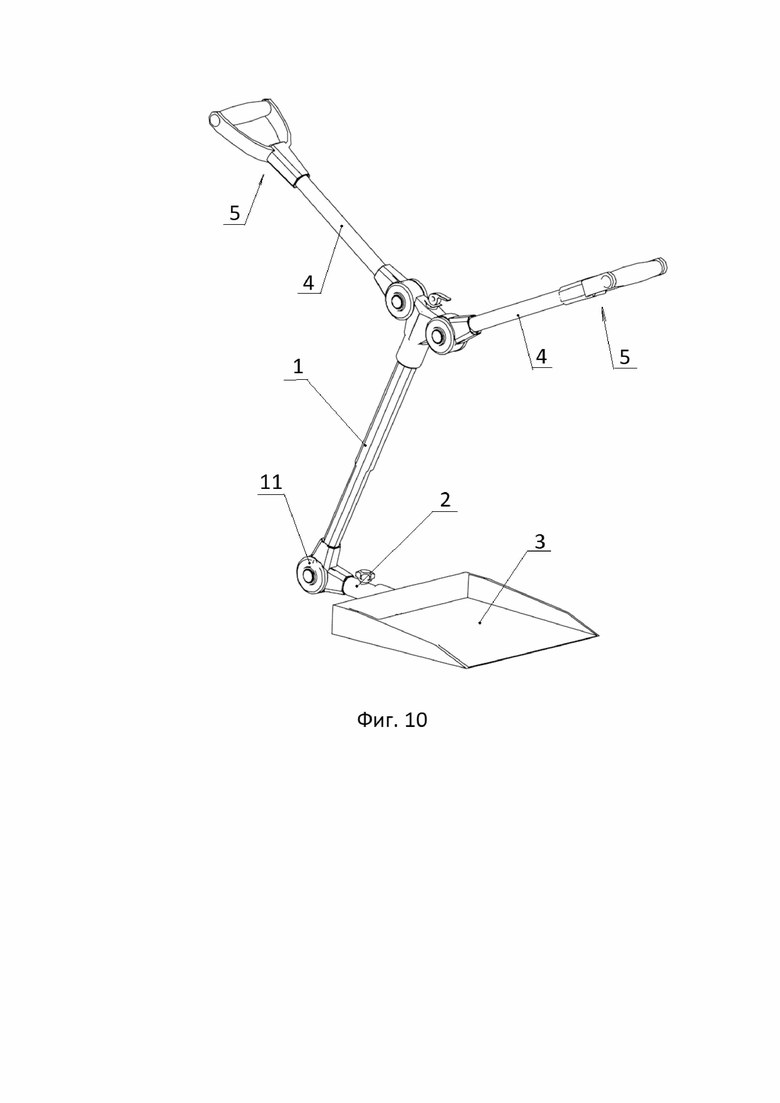
[33] На фигуре 10 показан другой вариант конфигурации ручки в рабочем положении в составе снеговой лопаты;
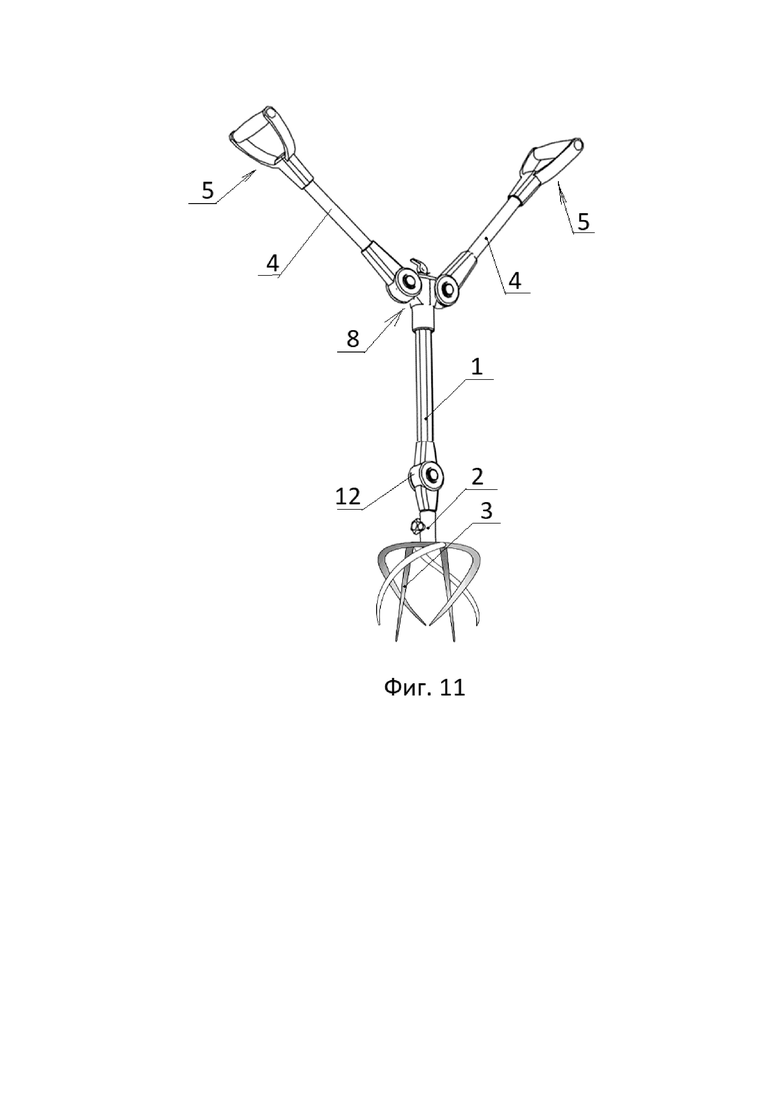
[34] На фигуре 11 показана конфигурация ручки в рабочем положении в составе ручного культиватора.
[35] Элементы конструкции и другие объекты обозначены на фигурах следующими позициями:
1 – основание,
2 – узел крепления рабочего органа инструмента,
3 – рабочий орган инструмента,
4 – тяга,
5 – рукоятка,
6 – средство фиксации длины основания,
7 – захватный элемент рукоятки,
8 – шарнирный узел,
9 – шарнир,
10 – элемент фиксации тяг,
11 – дополнительный шарнир,
12 – пользователь.
[36] Осуществление изобретения
[37] Заявленная ручка (фиг. 1-3) содержит стержневое основание (1), узел (2) крепления рабочего органа (3) инструмента, а также две поворотные тяги (4) с рукоятками (5).
[38] Основание (1), предпочтительно, представляет собой прямой трубчатый элемент круглого, овального, треугольного, квадратного, многогранного или иного сечения. Основание (1) выполнено раздвижным (телескопическим) и состоит из двух или более коаксиальных трубчатых элементов. При этом используется средство (6) для фиксации этих элементов в заданном положении. В качестве указанного средства (6) может применяться, например, рычажный фиксатор, размещенный на верхнем конце основания (1). Возможность регулировки длины основания позволяет адаптировать устройство под индивидуальные параметры пользователя, а также под конкретный инструмент, особенно в условиях работы в ограниченном пространстве.
[39] Узел крепления (2) рабочего органа (3) инструмента установлен на первом (нижнем) конце основания (1) и может иметь различную конфигурацию. В частности, он может быть выполнен в виде винтового зажима для трубчатой части рабочего органа с воротком для быстрой фиксации или в виде цангового зажима. Конструкция таких узлов хорошо известна специалистам. В качестве рабочего органа (3) может крепиться, например, полотно совковой или штыковой лопаты, зубья вил, спиралевидные зубья ручного культиватора, кузов транспортировочной тележки и т.д.
[40] Тяги (4) предназначены для перемещения инструмента с помощью обеих рук. Тяги (4) представляют собой прямые или слегка изогнутые штанги, один конец которых соединен со вторым (верхним) концом основания (1), а другой – предназначен для крепления рукояток (5). При этом тяги (4) расположены симметрично с двух сторон относительно оси основания.
[41] Рукоятки (5) снабжены захватными элементами (частями) (7), ориентированными в поперечном относительно оси основания направлении. Сами рукоятки (5) могут иметь замкнутую арочную (как показано на чертежах), Г-образную, Т-образную или любую другую формы.
[42] Тяги (4) соединены с основанием посредством шарнирного узла (8) обеспечивающего возможность вращения тяг в одной общей (вертикальной) плоскости, в которой лежит основание. Шарнирный узел (8) может включать два отдельных шарнира (9) (как показано на чертежах) или один общих шарнир для вращения тяг (4).
[43] В шарнирном узле (8) могут быть дополнительно предусмотрены элементы (10) для фиксации тяг (4) в заданном угловом положении, чтобы установить относительное расположение рукояток (5) при работе с конкретным инструментом. Указанные элементы (10) могут иметь любую известную специалисту конфигурацию. В частности, они могут быть выполнены в виде кнопок для стопорения шарнира или шарниров.
[44] Как и в случае с основанием (1), тяги (4) могут быть выполнены раздвижными (телескопическими) для обеспечения независимой регулировки длины каждой тяги (4). Это позволяет подстроить ручку под индивидуальные параметры пользователя и конкретного инструмента и дает возможность снизить мышечную нагрузку при работе. Кроме того, может быть предусмотрено средство для фиксации раздвижных тяг на необходимой длине (на чертежах не показано).
[45] В частном варианте реализации изобретения может быть предусмотрена дополнительная возможность вращения тяг (4) в плоскости, перпендикулярной оси основания, т.е. в горизонтальной плоскости. Это может быть реализовано путем установки шарнирного узла (8) на основании (1) с возможностью вращения относительно его оси. Поэтому появляется возможность изменения углового положения рабочего органа относительно самого пользователя, удерживающего инструмент, что может повысить удобство работы и, как следствие, снизить мышечную нагрузку.
[46] В одном из вариантов исполнения конструкции основание (1) на первом (нижнем) конце может быть размещен дополнительный шарнир (11) (фиг. 2,3), дающий возможность изменения угла наклона узла крепления (2) с рабочим органом (3) относительно оси основания. Указанный дополнительный шарнир (11) расширяет возможности использования инструмента и обеспечивает снижение нагрузки за счет задания наиболее удобной геометрической конфигурации.
[47] Кроме того, в конструкции ручки может быть предусмотрена возможность перемещения одной из тяг (4) вдоль основания (1). При этом опционально одна из тяг (4) может вращаться вместе с основанием (1) относительно второй неподвижной тяги (на чертежах не показано). Указанные возможности дополнительно повышают универсальность в адаптации ручки для работы в условиях ограниченного пространства.
[48] Универсальная ручка работает следующим образом.
[49] Пользователь (12) закрепляет на ручке необходимый рабочий орган (3) инструмента, например, полотно лопаты (см. фиг.4-6,9,10), грабли (фиг.7,8) или винтовой культиватор (фиг. 11). В зависимости от своего роста он может настроить длину основания (1) ручки.
[50] С помощью шарнирного узла (8) пользователь устанавливает тяги (4) в необходимое угловое положение и фиксирует его посредством элементов (10). Например, при работе со штыковой лопатой (см. фиг. 5,6) оптимальным положением является размещение правой (для правшей) тяги по существу параллельно оси основания (1), а левой тяги - под углом около 60-80° к оси основания (1). При работе с граблями (см. фиг.7) тяги (4) размещаются симметрично по небольшим углом (15-30°) к оси основания (1).
[51] В зависимости от ширины плеч и длины рук пользователь может отрегулировать размер тяг (4), определяющую вылет рукояток (5).
[52] При работе с инструментом пользователь прилагает усилия к рукояткам (5) так, что тяги (4) совершают преимущественно поворотные перемещения в вертикальной плоскости, при этом спина пользователя остается прямой. Это позволяет разгрузить позвоночник, перераспределить усилия и снизить нагрузку на отдельные мышечные группы. При этом ориентация захватных элементов (6) рукояток (5) в горизонтальной плоскости дает возможность более эффективного перемещения инструмента с помощью двух рук, что не может быть реализовано в ситуации, когда захватный элемент ориентирован параллельно оси инструмента, например, в традиционной конструкции лопат, вил и т.д.
[53] Использование универсальной ручки для других типов инструмента осуществляется аналогично и может отличаться только расположением и длиной тяг. Например, при использовании ручки в составе тележки, тяги устанавливаются симметрично под углом 20-40° к оси основания. В случае применения устройства в составе ручного культиватора с винтовыми зубьями (см. фиг.11) угол наклона тяг увеличивается и может доходить до 90°, при этом длина тяг может быть уменьшена.
[54] В случае отсутствия возможности регулировки длины тяг и основания в устройстве, изменение вылета рукояток, а также длины инструмента может осуществляться регулировкой угла наклона тяг. Т.е. наличие описанных дополнительных средств регулировки для тяг, основания и рабочего органа желательно, но строго необязательно, для достижения технического результата изобретения.
[55] При хранении инструмента, тяги могут быть опущены вниз (см. фиг. 3), что определяет дополнительное преимущество конструкции, заключающееся в компактности устройства.

Изобретение относится к универсальной ручке для инструмента, которая может использоваться в составе различного садового инвентаря для обработки почвы, например, лопат, грабель, вил, культиваторов, а также другого типа ручного инструмента, удерживаемого с помощью обеих рук, например, транспортирующих тележек, ударных устройств. Ручка содержит стержневое основание, узел крепления рабочего органа инструмента, размещенный на одном конце основания, и две тяги, связанные с другим концом основания, расположенные с двух сторон относительно оси основания и снабженные рукоятками с захватными элементами, ориентированными поперек оси основания. Основание выполнено с возможностью изменения длины и фиксации в заданном положении. Тяги соединены с основанием с возможностью поворота в плоскости, в которой лежит основание. Такое выполнение обеспечивает возможность использования ручки в составе инструмента в условиях ограниченного пространства и снижение мышечной нагрузки на пользователя при работе с ручкой за счет универсальности в настройке. 8 з.п. ф-лы, 11 ил.
1. Ручка инструмента, содержащая стержневое основание, узел крепления рабочего органа инструмента, размещенный на одном конце основания, и две тяги, связанные с другим концом основания, расположенные с двух сторон относительно оси основания и снабженные рукоятками с захватными элементами, ориентированными поперек оси основания, отличающаяся тем, что основание выполнено с возможностью изменения длины и фиксации в заданном положении, а тяги соединены с основанием с возможностью поворота в плоскости, в которой лежит основание.
2. Ручка по п. 1, отличающаяся тем, что снабжена шарнирным узлом для крепления тяг к основанию.
3. Ручка по п. 2, отличающаяся тем, что шарнирный узел содержит два шарнира для крепления тяг.
4. Ручка по п. 2, отличающаяся тем, что шарнирный узел содержит один общий шарнир для крепления тяг.
5. Ручка по п. 2, отличающаяся тем, что шарнирный узел снабжен элементами для фиксации тяг в заданной угловом положении.
6. Ручка по п.2, отличающаяся тем, что шарнирный узел выполнен с возможностью вращения относительно оси основания.
7. Ручка по п. 1, отличающаяся тем, что тяги выполнены раздвижными.
8. Ручка по п. 1, отличающаяся тем, что узел крепления рабочего органа инструмента выполнен в виде зажима для трубчатого элемента.
9. Ручка по п. 1, отличающаяся тем, что узел крепления рабочего органа инструмента установлен с возможностью изменения углового положения относительно оси основания.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| КОНФИГУРИРУЕМОЕ УСТРОЙСТВО ДЛЯ ФОТОТЕРАПИИ | 2008 |
|
RU2481870C2 |
| US 9149925 B1, 06.10.2015 | |||
| Винт для регулирования силы нажатия контактного пальца на контактный сегмент контроллера | 1929 |
|
SU22732A1 |

