Изобретение касается культиватора и фрезы для него.
Известные культиваторы принципиально можно разделить на две группы в зависимости от типа фрез, используемых в этих культиваторах.
Первая группа включает в себя оснащенные мотором культиваторы, которые имеют рабочий орган в виде ряда фрез, которые закреплены на общем горизонтальном валу. Каждая фреза выполнена в виде креста или звезды, концы лучей которых либо отогнуты в одну сторону, либо поочередно отогнуты в противоположные стороны. Типичным представителем данной группы являются, например, имеющиеся на рынке культиваторы Craftsman 29701 или Texas Hobby 500 B.
Недостатком данных типов фрез является нестабильность работы ввиду зарывания в почву или, наоборот, выскакивания из нее. Этот недостаток еще более усиливается в случае неоднородности почвы, наличия в ней камней и/или малого веса всего агрегата (от 6 до 40 кг). Увеличение веса несколько улучшает стабильность, но негативно сказывается на управляемости культиватором. Кроме того, в подобных культиваторах фрезы вращаются с относительно высокой окружной скоростью, поэтому в случае столкновения с камнями данные фрезы либо выскакивают из почвы, либо выбрасывают камни с высокой скоростью. Это может приводить как к повреждению фрезы, так и к опасности ранения оператора.
Вторая группа включает в себя культиваторы, оснащенные фрезой с П-образными или стержнеобразными элементами, которая закреплена верхней частью на валу и совершает круговое или маятниковое вращение вокруг вертикальной оси. Типичным представителем данного типа является культиватор Black&Decker GXC 1000.
Недостатком данных культиваторов является то, что они во время работы должны удерживаться на весу и с частичной опорой на тело. Вследствие этого они должны иметь малый вес (от 3 до 5 кг). Соответственно, в них применяются легкие и компактные моторы. Поэтому данные культиваторы применяются только на «легких» почвах для лущения поверхностного слоя (глубина 3 - 5 см) и обработки очень небольших площадей. Кроме того, ввиду удержания данных культиваторов на руках - особенно при длительной работе или обработке относительно большой площади - имеет место утомляемость оператора, что, в свою очередь, приводит к нестабильной обработке почвы (различия в глубине и качестве обработки). Для данных культиваторов также является проблемой работа на неоднородных почвах и почвах с большим количеством камней.
С учетом описанного уровня техники в настоящий момент имеется потребность в культиваторе, который позволяет стабильную обработку почвы, не чувствителен к типу обрабатываемой почвы и наличию в ней камней, является легкоуправляемым, не имеет весовых ограничений и пригоден для обработки как больших, так и совсем малых площадей.
Предоставление подобного культиватора и является задачей изобретения.
Эта задача решается с помощью культиватора, имеющего раму; ручки, которые прикреплены к раме и служат для удержания культиватора и его направления; опору, которая соединена с рамой и служит для опирания культиватора на грунт; мотор, закрепленный на раме; и рабочий орган, который выполнен с возможностью приведения во вращательное движение от привода. Рабочий орган образован несколькими выполненными с возможностью вращения фрезами. Оси вращения фрез по существу параллельны друг другу и ориентированы в направлении движения культиватора под углом к подлежащей обработке почве. Каждая фреза имеет приводимый от мотора приводной вал и, по меньшей мере, два закрепленных на этом приводном валу и выполненных с возможностью взаимодействия с почвой пальца. Каждый палец задан винтовой линией, образованной вокруг оси вращения фрезы. Направление хода винтовой линии пальцев соответствующей фрезы совпадает с направлением вращения этой фрезы, а направления вращения, по меньшей мере, двух из упомянутых фрез являются противоположными.
Наличие у фрезы отдельных пальцев, каждый из которых задан винтовой линией с ходом в направлении вращения фрезы, позволяет вкручивание фрезы в почву и устраняет проблему выскакивания фрезы из почвы. Это также облегчает оператору задачу ввода фрезы в почву при затрате меньших усилий и не требует обязательного применения тяжелых моторов и/или другого рода дополнительной нагрузки (рамы с увеличенным весом, дополнительных грузов или т.п.) для стабилизации работы культиватора.
Кроме того, при "вкручивании" соответствующий палец фрезы скользит в почве и при столкновении с камнями проскальзывает по ним или смещает их, что опять же обеспечено конфигурацией пальцев фрезы. Таким образом, заявленные фрезы не чувствительны или лишь в незначительной степени чувствительны к наличию камней в почве. Эта нечувствительность еще больше усиливается вследствие описанного ниже наклона осей фрез.
Наклон осей фрез в процессе работы культиватора относительно почвы приводит к возникновению усилия, которое имеет вертикальную и горизонтальную составляющую. Вертикальная составляющая усилия наряду с винтовой формой пальцев удерживает пальцы в зацеплении с почвой и тем самым поддерживает постоянной глубину внедрения фрезы в почву. Это также исключает или практически исключает выскакивание фрезы из почвы и негативное влияние на стабильность работы культиватора и обработки почвы. За счет этого от оператора не требуется приложение усилий для возврата и/или удержания культиватора в надлежащем рабочем положении. Горизонтальная составляющая усилия способствует перемещению культиватора в направлении движения. За счет этого исключается проблема "зарывания" культиватора в почву. Более того, наличие горизонтальной составляющей усилия снижает усилия, которые оператор должен приложить для перемещения вперед культиватора во время его работы, и даже позволяет перемещение культиватора вперед без воздействия со стороны оператора.
Кроме того, наличие такого имеющего горизонтальную и вертикальную составляющие усилия позволяет избежать применения тяжелых и/или мощных моторов и/или громоздких передач, но при этом существенно улучшить стабильность работы и управляемость культиватора.
Таким образом, наклонное и ориентированное в направлении движения культиватора, в частности вперед, расположение фрез и соответственно их осей и выполнение их пальцев в виде направленной в направлении вращения фрезы винтовой линии исключает присущие известным из уровня техники культиваторам проблемы выскакивания и зарывания в почву, нестабильности обработки почвы, а также значительного веса и/или плохой управляемости.
Стабильность и управляемость также повышается за счет противоположного вращения, по меньшей мере, двух из упомянутых фрез. Подобное вращение фрез компенсирует боковые усилия, создаваемые каждой фрезой в процессе ее вращения, и тем самым стабилизирует культиватор в боковом направлении и освобождает оператора от необходимости приложения усилий для удержания культиватора от опрокидывания или заваливания в ту или иную сторону и для удержания культиватора на требуемой траектории. В связи с противоположным вращением фрез и в том числе обусловленной этим боковой компенсацией также дополнительно поддерживается баланс создаваемых фрезами усилий, которые способствуют зарыванию в почву, с одной стороны, и выскакиванию из почвы, с другой стороны, это позволяет поддерживать культиватор в надлежащем положении и рабочем режиме.
Особенно предпочтительно для повышения стабильности и управляемости и предотвращения выскакивания/зарывания, если направление вращения упомянутых, по меньшей мере, двух фрез выбрано так, что левая, если смотреть в направлении движения, из двух этих фрез вращается против часовой стрелки, а правая, если смотреть в направлении движения, из двух этих фрез - по часовой стрелке.
Кроме того, изобретение относится к культиватору, который пригоден для использования в качестве навесного или прицепного агрегата трактора или тому подобного транспортного средства. Для этого культиватор вместо собственного мотора снабжен устройством сопряжения для соединения с приводом культиватора в виде вала отбора мощности трактора или тому подобного транспортного средства. Также культиватор снабжен не ручками, а тягового-сцепным или навесным прицепным устройством для соединения с трактором или тому подобным. В остальном конструкция культиватора по существу повторяет описываемую в заявке конструкцию культиватора в ручном исполнении.
Настоящее изобретение также относится к фрезе, которая применима в рабочем органе культиватора.
Другие признаки изобретения, достигаемые технические результаты и возможные усовершенствования изобретения следуют из приведенного ниже описания со ссылками на прилагаемые чертежи.
На чертежах показано:
Фиг.1 - вид сбоку соответствующего изобретению культиватора;
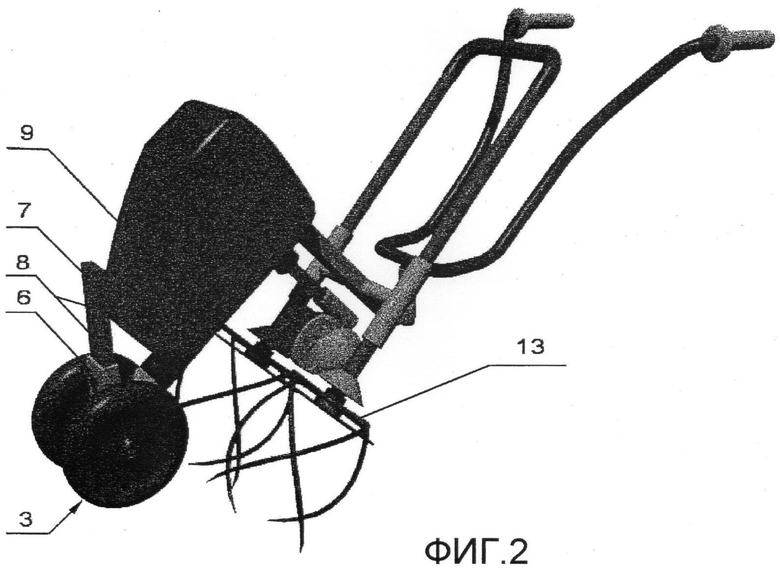
Фиг.2 - вид в перспективе соответствующего изобретению культиватора;
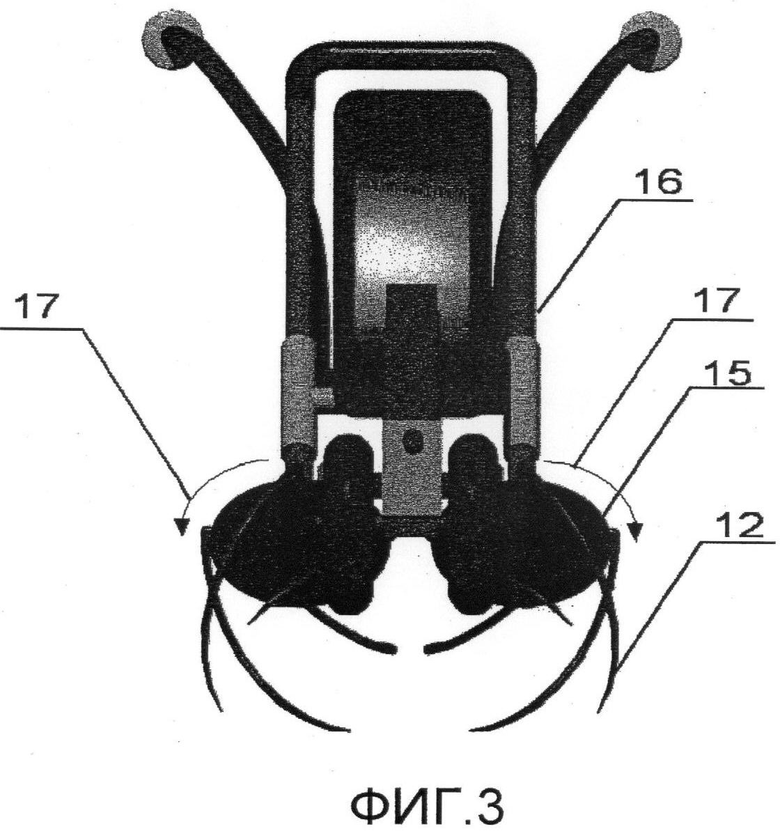
Фиг.3 - вид спереди соответствующего изобретению культиватора.
На фиг.1 представлен культиватор на виде сбоку. Культиватор имеет раму 1, с которой соединены ручки 2. Ручки 2 служат для удержания культиватора в рабочем положении и управления им, т.е. направления его. Ручки 2 могут быть выполнены с возможностью регулирования по длине, например, за счет их телескопического выполнения. Также ручки могут быть выполнены с возможностью поворота в вертикальной плоскости и фиксации в удобном для оператора положении. Для этого могут быть предусмотрены необходимые фиксирующие средства. Кроме того, для удобства оператора может быть предусмотрена установка ручек с возможностью поворота в горизонтальной плоскости, как это можно видеть на фиг.1.
Опора 3 служит для опирания культиватора на почву. В представленном варианте осуществления опора 3 представляет собой колесную опору, в частности пару колес 4, которые установлены на оси 5, которая, в свою очередь, установлена в передней, если смотреть в направлении движения культиватора, части рамы 1. Очевидно, что может быть предусмотрено и только одно колесо. Альтернативно или дополнительно, опора может быть предусмотрена в задней, если смотреть в направлении движения культиватора, части рамы 1 или по бокам рамы.
Колеса 4 могут быть либо неподвижно насажены на ось 5, которая установлена в раме с возможностью вращения, либо установлены с возможностью вращения на оси 5, которая неподвижно установлена в раме.
Ось 5 может быть установлена непосредственно в раме 1. Для этого в раме 1 предусмотрены отверстия, в которые вставляется ось 5, и крепежные средства для ее фиксации в данных отверстиях. Крепежные средства сами по себе являются известными и здесь подробнее не описываются. Разумеется, в случае установки оси 5 с возможностью вращения должен быть предусмотрен подшипниковый узел, что является само по себе известным и подробнее здесь также не поясняется.
В показанном варианте осуществления, однако, использован другой вид установки в раме. Так, предусмотрен переходник 6, который жестко соединен с передним концом рамы 1. Переходник 6 представляет собой угловую деталь, первое плечо которого жестко соединено с рамой 1, например, посредством резьбового соединения, сварного соединения, вставочного соединения или т.п. Разумеется, в отдельных случаях переходник может быть выполнен за одно целое с рамой 1.
Второе плечо переходника 6 выполнено полым или, соответственно, снабжено отверстием. Указанная полость/отверстие предусмотрена для установки стойки 7, которая на своем нижнем конце несет ось 5, одним из описанных выше для установки оси 5 в раме 1 способов. Далее, в стойке 7 предусмотрен вертикальный ряд отверстий 8, которые выполнены с возможностью совмещения с отверстием или отверстиями во втором плече переходника 6. При совмещении соответствующего отверстия 8 стойки 7 с отверстием/отверстиями второго плеча переходника 6 в них вставляется стержневой фиксатор. За счет указанного мероприятия возможно регулирование уровня культиватора над почвой и тем самым регулирование глубины рыхления почвы.
В показанном варианте осуществления опора 3 выполнена без непосредственного привода и приводится во вращение при толкании культиватора сзади оператором и/или за счет развиваемого при работе рабочим органом культиватора усилия, что более подробно будет пояснено ниже. Однако возможен также вариант осуществления, в котором опора 3 приводится во вращения от мотора культиватора.
Альтернативно, опора 3 может быть выполнена в виде гусеничного движителя, который известным образом приводится в действие от имеющегося мотора.
На раме 1 закреплен мотор 9, который служит для приведения во вращение рабочего органа культиватора через передачу 10. В указанных выше случаях мотор 9 также может приводить в действие опору 3 через соответствующую передачу. Принципиально приведение в действие от одного мотора нескольких узлов через соответствующие передачи является широко известным и поэтому здесь не нуждается в дополнительном пояснении.
Мотор 9 может быть электромотором, который работает от электросети, аккумуляторов, солнечных батарей и т.п. Альтернативно, мотор 9 может быть мотором, который работает на жидком или газообразном топливе.
Передача 10 в данном случае выполнена в виде червячного редуктора. Однако очевидным образом могут быть применены другие типы зубчатых передач, ременные передачи, цепные передачи или т.п.
Рабочий орган в данном варианте осуществления выполнен в виде двух по существу параллельных друг другу фрез 11.
Каждая фреза 11 имеет приводной вал, которым она установлена на раме 1 с возможностью приведения во вращение от привода культиватора, в данном случае от мотора 9 через передачу 10. С приводным валом фрезы 11 связано, по меньшей мере, два выполненных в виде (металлических, полимерных или тому подобного материала) стержней пальца 12 фрезы. В показанном варианте осуществления каждая фреза имеет четыре пальца 12. Пальцы 12 связаны с валом фрезы либо за счет прикрепления к периферии закрепленного на конце вала фрезы диска, либо, как в представленном варианте осуществления, за счет своего отогнутого продолжения 13, который под прямым углом прикреплен к валу фрезы.
Каждый палец 12 изогнут/проходит в виде цилиндрической винтовой линии, образованной вокруг воображаемой оси, которая совпадает с осью приводного вала фрезы и тем самым с осью вращения фрезы. Пальцы 12 одной фрезы расположены на одинаковом угловом расстоянии друг от друга. Так, в случае двух пальцев угловое расстояние между ними составляет 180°, в случае трех - 120° и т.д. В показанном варианте осуществления каждая фреза имеет четыре пальца 12, которые соответственно дистанцированы друг от друга на 90°. Равномерность распределения является благоприятной для распределения возникающих в процессе вращения фрез усилий и тем самым для дополнительного устранения описанных выше недостатков уровня техники.
Предпочтительным образом каждый палец 12 описывает вокруг упомянутой воображаемой оси угол, который не превышает угловое расстояние до соседнего пальца. Это имеет место для показанного варианта осуществления. Однако возможны и другие углы, описываемые пальцами.
Направление изгиба пальцев (т.е. направление хода цилиндрической винтовой линии) соответствует направлению вращения фрезы. За счет этого свободный конец каждого пальца при вращении фрезы вкручивается в почву и тем самым существенно облегчает внедрение фрезы в почву с незначительными прикладываемыми оператором усилиями для этого.
Кроме того, оси вращения обеих фрез 11 в процессе работы культиватора находятся под острым углом к почве, который своей вершиной обращен в направлении движения культиватора. Подобная наклонная ориентация фрез 11 при их вращении в процессе работы культиватора приводит к возникновению усилия, которое имеет вертикальную и горизонтальную составляющую.
Вертикальная составляющая усилия удерживает пальцы 12 в зацеплении с почвой и тем самым поддерживает постоянной глубину внедрения фрезы в почву. Таким образом, при работе культиватора исключено или практически исключено выскакивание фрезы 11 из почвы и тем самым нарушение стабильности работы культиватора и обработки почвы. Соответственно отпадает и необходимость приложения оператором усилий для возврата и удерживания культиватора/его рабочего органа в надлежащее рабочее положение.
Горизонтальная составляющая усилия, которое развивается фрезами 11 рабочего органа, способствует перемещению культиватора в направлении движения или обеспечивает это перемещение. За счет этого исключается опасность "зарывания" культиватора в почву. Более того, наличие горизонтальной составляющей усилия снижает усилия, которые оператор должен приложить для перемещения вперед культиватора во время его работы, или позволяет даже вообще отказаться от приложения оператором усилия для перемещения вперед культиватора. Последнее возможно (например, на определенных типах почв) при достижении такой величины усилия, которое достаточно для самостоятельного перемещения культиватора. Таким образом, фрезы 11 по существу могут являться приводом для осуществления перемещения культиватора по почве или частью привода, если речь идет об одной фрезе 11 и/или если привод для указанного перемещения культиватора осуществляется за счет приведения опоры 4 от мотора 9 культиватора.
Следует отметить, что стабильность и надежность работы культиватора реализованы в противоположность известному уровню техники без увеличения веса культиватора, а исключительно за счет выполнения и ориентации фрез 11 и создаваемого ими усилия, что не только не ухудшило управляемость культиватора, но и, как указано выше, значительно облегчило ее.
Направления 17 вращения обеих фрез 11 являются противоположными, за счет чего компенсируются боковые усилия, создаваемые каждой фрезой 11 в процессе ее вращения. Благодаря этому культиватор является стабильным в боковом направлении и освобождает оператора от необходимости приложения усилий для удержания культиватора от опрокидывания или заваливания в ту или иную сторону и/или для удержания культиватора на требуемой траектории. Подобная стабилизация является не единственным положительным эффектом, обусловленным противоположным вращением фрез 11. Это также приводит к дополнительному поддержанию баланса усилий, чтобы избежать свойственного известному уровню техники выскакивания или зарывания культиватора.
В показанном варианте осуществления фрезы выполнены так, что левая, если смотреть в направлении движения, фреза (на виде спереди по фиг.3 эта фреза показана справа) вращается против часовой стрелки, а правая, если смотреть в направлении движения, фреза (показана слева на фиг.3) вращается по часовой стрелке. За счет этого при вращении этих двух фрез их пальцы описывают такую траекторию, что вначале приближаются друг к другу при движении от поверхности вглубь почвы, а затем расходятся и, проходя через самую глубокую точку, вновь движутся к поверхности. Оказалось, что подобный выбор направления вращения особенно благоприятен для работы культиватора, в частности обеспечивает наибольшее стабилизирующее действие и наилучшую управляемость, а также устранение проблем выскакивания/зарывания культиватора.
В случае наличия нескольких фрез предпочтительно, чтобы фрезы, расположенные с одной стороны от продольной вертикальной плоскости симметрии культиватора, вращались в одну сторону, а с другой стороны - в другую сторону. Однако возможно также, чтобы в противоположных направлениях вращались каждые две смежные фрезы. Но очевидно, что могут быть реализованы и другие схемы противоположного вращения фрез.
Дополнительно вводу фрезы 11 в почву и облегчению работы культиватора может способствовать выполнение пальцев 12 соответственно с заостренным концом и/или острой кромкой, проходящей по (всей) длине пальца 12 и обращенной в направлении его вращения.
Наконец, в представленном варианте осуществления культиватор снабжен согласованным с каждой фрезой 11 выталкивателем 14. В данном случае выталкиватель 14 содержит расположенный между пальцами 12 фрезы 11 диск 15, диаметр которого меньше, чем диаметр заданного пальцами 12 кругового цилиндра. Диск 15 закреплен на штанге 16, которая концентрично проходит сквозь вал фрезы, который для этой цели выполнен полым. Далее, штанга 16 проходит через раму 1 культиватора и соединяется на своем обращенном от диска конце показанным на фиг.1-3 образом со штангой 16 другой фрезы 11. Таким образом, обе штанги 16 могут образовывать общий выталкиватель в виде по существу П-образной трубы. Однако возможно выполнение выталкивателя для каждой фрезы отдельно. При забивании почвой и/или частями растений (дерн) пространства, ограниченного пальцами 12 фрезы, или при очистке фрез 10 после окончания работы или через определенные периоды работы оператор осуществляет нажатие на выталкиватель 14, вследствие чего штанги 16 линейно (продольно) перемещаются внутри рамы 1 и полого вала фрезы 11 и осуществляют линейное перемещение дисков 15 между пальцами 12 и вдоль них в направлении их концов, тем самым очищают пространство между пальцами 12 от загрязнений (почва, дерн и т.д.). Поскольку концы пальцев 12 не соединены друг с другом, то никаких препятствий для выталкивания почвы из пространства между пальцами 12 в области их концов не существует.
Вместо указанного выше и представленного на чертежах выполнения пальцев 12 фрезы аналогично цилиндрической винтовой линии может быть предусмотрено их выполнение в виде конической винтовой линии. При этом коническая винтовая линия может как расходиться, так и сходиться в направлении от вала фрезы к свободным концам пальцев 12. Подобное "коническое" выполнение может снизить сопротивление движению культиватора вперед, поскольку фрезами 11 охватывается меньший объем почвы.
В представленном варианте осуществления предусмотрено две фрезы 11. Однако возможно, как уже кратко упоминалось выше, и большее количество фрез, которые расположены в ряд вдоль линии, перпендикулярной направлению движения. Альтернативно, также возможно располагать ряд фрез 11 вдоль линии, проходящей не перпендикулярно направлению движения. В последнем случае речь также может идти о линии, которая не обязательно является прямой.
Предпочтительно количество фрез 11 может быть четным и расположено симметрично относительно продольной плоскости симметрии культиватора. Однако может быть предпочтительным и нечетное количество фрез 11, например, когда необходимо обработать круглый или кольцеобразный участок, в частности клумбы или область вокруг них. Наличие бóльшего количества фрез 11 с одной стороны будет способствовать перемещению не по прямой, а по дуговой траектории. Аналогичного эффекта можно добиться за счет обеспечения соответствующей разницы в диаметрах фрез или соответствующей комбинации "конических" и "цилиндрических" фрез, расположенных с разных сторон относительно плоскости симметрии культиватора.
Съемное выполнение фрез 11 позволяет варьировать набор используемых фрез в соответствии с актуальными требованиями или заменять их в случае поломки или необходимости заточки.
Поскольку фрезы 11 рабочего органа культиватора являются сменными элементами культиватора, а кроме того, могут также производится отдельно от культиватора, то настоящее изобретение также относится к фрезе для описанного выше культиватора в ее самостоятельном значении. Описанные выше преимущества культиватора в части его рабочего органа очевидным образом относятся и к фрезе.
Описанный выше культиватор может быть использован в качестве прицепного или навесного агрегата для трактора или тому подобного транспортного средства. Для этого культиватор имеет связанное с рамой культиватора тягово-сцепное или, соответственно, навесное сцепное устройство для соединения с трактором. Кроме того, культиватор также вместо собственного мотора может быть снабжен расположенным на раме устройством сопряжения для соединения культиватора или, соответственно, его передачи с валом отбора мощности трактора. Таким образом, вращательное движение от вала отбора мощности трактора через упомянутое устройство сопряжения передается на приводные валы фрез рабочего органа. Устройство сопряжения включает в себя передачу, которая может быть выполнена в виде зубчатой, ременной или цепной передачи. Подобные устройства для соединения навесного/прицепного агрегата с трактором и устройства сопряжения для соединения с валом отбора мощности трактора широко известны из уровня техники и поэтому здесь не будут описаны подробнее. Существенным здесь является то, что указанный культиватор снабжен принципиально новым типом фрезы, который был описан выше и который позволяет получить подробно описанные выше преимущества перед известным уровнем техники.
Культиватор также может быть снабжен устройством для соединения с гидроцилиндром, закрепляемым другим концом на тракторе. Это позволит наиболее простым образом перемещать культиватор из рабочего положения, в котором он готов для обработки почвы, в транспортное положение, в которое культиватор переводится при переезде с одного места обработки на другое. Подобная схема соединения навесного агрегата и трактора также широко известна из уровня техники и здесь подробнее не описывается.
| название | год | авторы | номер документа |
|---|---|---|---|
| Универсальная ручка инструмента | 2019 |
|
RU2706407C1 |
| РУЧНОЙ КУЛЬТИВАТОР | 1999 |
|
RU2153787C1 |
| АГРЕГАТ КОМБИНИРОВАННЫЙ ДЛЯ ПЕРВИЧНОЙ И ПРЕДПОСЕВНОЙ ОБРАБОТКИ ПОЧВЫ С ФРЕЗОЙ С ГИДРАВЛИЧЕСКИМ ПРИВОДОМ | 2023 |
|
RU2807741C1 |
| РУЧНОЙ КУЛЬТИВАТОР | 2004 |
|
RU2273975C1 |
| РЫХЛИТЕЛЬ ПОЧВЫ | 1992 |
|
RU2044427C1 |
| КУЛЬТИВАТОР-ГЛУБОКОРЫХЛИТЕЛЬ | 2024 |
|
RU2833683C1 |
| КУЛЬТИВАТОР ДЛЯ АГРЕГАТИРОВАНИЯ С ФРЕЗОЙ С МЕХАНИЧЕСКИМ ПРИВОДОМ ДЛЯ ПЕРВИЧНОЙ И ПРЕДПОСЕВНОЙ ОБРАБОТКИ ПОЧВЫ | 2023 |
|
RU2810543C1 |
| КУЛЬТИВАТОР ФРЕЗЕРНЫЙ | 2014 |
|
RU2563940C1 |
| Орудие для окучивания и формирования борозд и гряд | 2016 |
|
RU2647321C1 |
| МОТОКУЛЬТИВАТОР СО СТРЕЛОВИДНЫМ РАСПОЛОЖЕНИЕМ ОСЕЙ ФРЕЗ - МКСФ | 2015 |
|
RU2602606C1 |
Культиватор имеет раму со смонтированными на ней ручками, опорой, мотором и рабочий орган. Рабочий орган выполнен с возможностью приведения во вращательное движение мотором и образован выполненными с возможностью вращения фрезами. Оси вращения фрез параллельны друг другу и ориентированы в направлении движения под углом к подлежащей обработке почве. Согласно второму варианту культиватор оснащен связанными с рамой тягово-сцепным или навесным прицепным устройством для соединения с трактором и устройством сопряжения. Устройство сопряжения расположено на раме и выполнено с возможностью соединения с приводом культиватора, выполненным в виде вала отбора мощности трактора. Фреза, используемая для рабочего органа каждого из вариантов механизированного культиватора, имеет приводной вал и, по меньшей мере, два закрепленных на этом приводном валу и выполненных с возможностью взаимодействия с почвой пальца. Каждый палец задан винтовой линией, образованной вокруг оси вращения фрезы. Направление хода винтовой линии пальцев соответствующей фрезы совпадает с направлением вращения этой фрезы. Направления вращения, по меньшей мере, двух из упомянутых фрез выбраны противоположными так, что левая, если смотреть в направлении движения, из двух этих фрез вращается против часовой стрелки, а правая, если смотреть в направлении движения, из двух этих фрез - по часовой стрелке. Использование культиваторов с фрезой для них позволит повысить стабильность и управляемость культиватора, уменьшить чувствительность к типу обрабатываемой почвы и наличию камней, облегчить манипулирование культиватором, устранить выскакивание и зарывание культиватора. 4 н. и 28 з.п. ф-лы, 3 ил.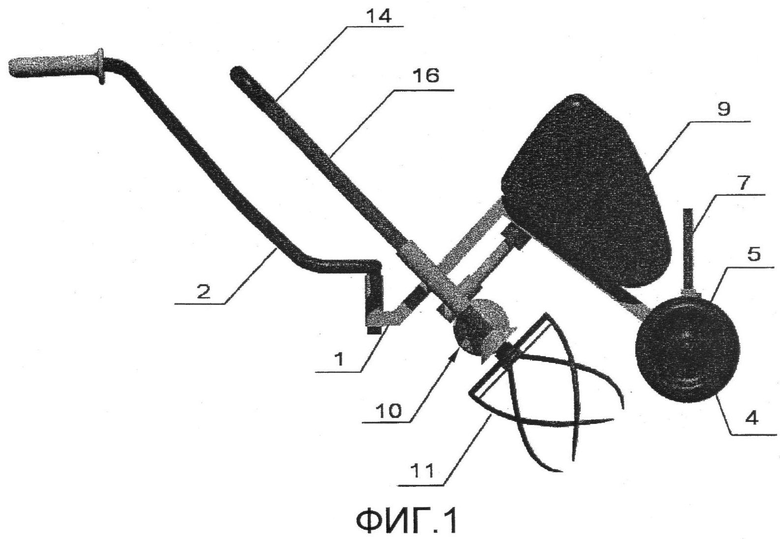
1. Культиватор, имеющий раму; ручки, которые прикреплены к раме и служат для удержания культиватора и его направления; опору, которая соединена с рамой и служит для опирания культиватора на грунт; мотор, закрепленный на раме; и рабочий орган, который выполнен с возможностью приведения во вращательное движение мотором, причем рабочий орган образован выполненными с возможностью вращения фрезами, оси вращения которых, по существу, параллельны друг другу и ориентированы в направлении движения культиватора под углом к подлежащей обработке почве, при этом каждая фреза имеет приводной вал и, по меньшей мере, два закрепленных на этом приводном валу и выполненных с возможностью взаимодействия с почвой пальца, каждый из которых задан винтовой линией, образованной вокруг оси вращения фрезы, причем направление хода винтовой линии пальцев соответствующей фрезы совпадает с направлением вращения этой фрезы, а направления вращения, по меньшей мере, двух из упомянутых фрез выбраны противоположными так, что левая - если смотреть в направлении движения - из двух этих фрез вращается против часовой стрелки, а правая - если смотреть в направлении движения - из двух этих фрез - по часовой стрелке.
2. Культиватор по п.1, отличающийся тем, что ручки выполнены с возможностью регулирования по высоте за счет своего телескопического выполнения или за счет своей установки с возможностью поворота и фиксации в вертикальной плоскости.
3. Культиватор по п.1, отличающийся тем, что ручки установлены в раме с возможностью поворота в горизонтальной плоскости.
4. Культиватор по п.1, отличающийся тем, что опора представляет собой колесную опору, которая установлена на установленной в раме оси или выполнена в виде гусеничного движителя.
5. Культиватор по п.1 или 4, отличающийся тем, что опора выполнена с возможностью привода от мотора культиватора.
6. Культиватор по п.1, отличающийся тем, что опора закреплена на вертикальной стойке, установленной непосредственно или опосредованно в раме с возможностью вертикального перемещения для задания уровня культиватора над почвой и глубины рыхления почвы.
7. Культиватор по п.1, отличающийся тем, что мотор выполнен с возможностью приведения рабочего органа за счет передачи вращения на приводные валы фрез рабочего органа через зубчатую, ременную или цепную передачу.
8. Культиватор по п.1, отличающийся тем, что каждый палец образован стержнем.
9. Культиватор по п.1, отличающийся тем, что задающая соответствующий палец фрезы винтовая линия представляет собой цилиндрическую винтовую линию или коническую винтовую линию.
10. Культиватор по п.1, отличающийся тем, что пальцы соответствующей фрезы равномерно распределены в ее окружном направлении.
11. Культиватор по п.1 или 10, отличающийся тем, что соответствующий палец фрезы описывает вокруг упомянутой воображаемой оси угол, который не превышает угловое расстояние до соседнего пальца фрезы.
12. Культиватор по п.1, отличающийся тем, что фрезы рабочего органа дополнительно являются приводом для осуществления перемещения культиватора по почве.
13. Культиватор по п.1, отличающийся тем, что пальцы выполнены с заостренным концом и/или с заостренной кромкой вдоль своей длины.
14. Культиватор по п.1, отличающийся тем, что снабжен выталкивателем для выталкивания скопившихся между пальцами фрезы загрязнений.
15. Культиватор по п.14, отличающийся тем, что выталкиватель выполнен в виде штанги, которая проходит через раму и выполненный полым приводной вал фрезы с возможностью продольного перемещения относительно них и которая несет на конце диск для взаимодействия с забившейся между пальцами почвой, который установлен между пальцами фрезы с возможностью линейного перемещения вдоль них.
16. Культиватор по п.15, отличающийся тем, что штанги каждой фрезы соединены между собой на обращенном от диска конце с созданием общего выталкивателя для очищения всех фрез одновременно.
17. Культиватор, имеющий раму; тягово-сцепное или навесное прицепное устройство, которое связано с рамой и служит для соединения культиватора с трактором; опору, которая соединена с рамой и служит для опирания культиватора на грунт; устройство сопряжения, расположенное на раме и выполненное с возможностью соединения с приводом культиватора, выполненным в виде вала отбора мощности трактора; и рабочий орган, который выполнен с возможностью приведения во вращательное движение от вала отбора мощности трактора через упомянутое устройство сопряжения, причем рабочий орган образован выполненными с возможностью вращения фрезами, оси вращения которых, по существу, параллельны друг другу и ориентированы в направлении движения культиватора под углом к подлежащей обработке почве, при этом каждая фреза имеет приводной вал и, по меньшей мере, два закрепленных на этом приводном валу и выполненных с возможностью взаимодействия с почвой пальца, каждый из которых задан винтовой линией, образованной вокруг оси вращения фрезы, причем направление хода винтовой линии пальцев соответствующей фрезы совпадает с направлением вращения этой фрезы, а направления вращения, по меньшей мере, двух из упомянутых фрез выбраны противоположными так, что левая - если смотреть в направлении движения - из двух этих фрез вращается против часовой стрелки, а правая - если смотреть в направлении движения - из двух этих фрез - по часовой стрелке.
18. Культиватор по п.17, отличающийся тем, что устройство сопряжения включает в себя передачу, которая может быть выполнена в виде зубчатой, ременной или цепной передачи.
19. Культиватор по п.17, отличающийся тем, что задающая соответствующий палец фрезы винтовая линия представляет собой цилиндрическую винтовую линию или коническую винтовую линию.
20. Культиватор по п.17, отличающийся тем, что пальцы выполнены с заостренным концом и/или с заостренной кромкой вдоль своей длины.
21. Фреза для механизированного культиватора по п.1, имеющая приводной вал, выполненный с возможностью приведения во вращение от привода культиватора, и пальцы, соединенные с приводным валом, причем каждый палец задан винтовой линией, образованной вокруг оси приводного вала фрезы.
22. Фреза по п.21, отличающаяся тем, что задающая соответствующий палец фрезы винтовая линия представляет собой цилиндрическую винтовую линию или коническую винтовую линию.
23. Фреза по п.21, отличающаяся тем, что пальцы соответствующей фрезы равномерно распределены в ее окружном направлении.
24. Фреза по п.21 или 23, отличающаяся тем, что соответствующий палец фрезы описывает вокруг упомянутой воображаемой оси угол, который не превышает угловое расстояние до соседнего пальца фрезы.
25. Фреза по п.21, отличающаяся тем, что пальцы выполнены с заостренным концом и/или с заостренной кромкой вдоль своей длины.
26. Фреза по п.21, отличающаяся тем, что каждый палец выполнен в виде стержня.
27. Фреза для механизированного культиватора по п.17, имеющая приводной вал, выполненный с возможностью приведения во вращение от привода культиватора, и пальцы, соединенные с приводным валом, причем каждый палец задан винтовой линией, образованной вокруг оси приводного вала фрезы.
28. Фреза по п.27, отличающаяся тем, что задающая соответствующий палец фрезы винтовая линия представляет собой цилиндрическую винтовую линию или коническую винтовую линию.
29. Фреза по п.27, отличающаяся тем, что пальцы соответствующей фрезы равномерно распределены в ее окружном направлении.
30. Фреза по п.27 или 29, отличающаяся тем, что соответствующий палец фрезы описывает вокруг упомянутой воображаемой оси угол, который не превышает угловое расстояние до соседнего пальца фрезы.
31. Фреза по п.27, отличающаяся тем, что пальцы выполнены с заостренным концом и/или с заостренной кромкой вдоль своей длины.
32. Фреза по п.27, отличающаяся тем, что каждый палец выполнен в виде стержня.
| СН 612573 А5, 15.08.1979 | |||
| РУЧНОЙ КУЛЬТИВАТОР | 1999 |
|
RU2153787C1 |
| РУЧНОЕ ПОЧВООБРАБАТЫВАЮЩЕЕ ОРУДИЕ | 2002 |
|
RU2231943C2 |
| US 4621697 A, 11.11.1986. | |||

