Область техники, к которой относится изобретение
[0001] Настоящее раскрытие сущности относится к обнаружению листвы, а более конкретно, относится к обнаружению листвы с использованием данных дальности.
Уровень техники
[0002] Автомобили предоставляют значительную часть средств транспортировки для коммерческих, государственных и частных организаций. Автономные транспортные средства и системы помощи при вождении в настоящее время разрабатываются и развертываются с возможностью предоставлять признаки безопасности, уменьшать величину требуемого пользовательского ввода или даже полностью исключать участие пользователя. Например, некоторые системы помощи при вождении, к примеру, системы предотвращения столкновений, могут отслеживать вождение, позиции и скорость транспортного средства и других объектов в то время, когда человек осуществляет вождение. Когда система обнаруживает то, что столкновение или удар является неизбежным, система предотвращения столкновений может вмешиваться и применять торможение, рулить транспортным средством или выполнять другие маневры для предотвращения опасных ситуаций или обеспечения безопасности. В качестве другого примера, автономные транспортные средства могут выполнять вождение, осуществлять навигацию и/или парковать транспортное средство с минимальным пользовательским вводом. Поскольку объезд помех представляет собой ключевую часть автоматизированного вождения или вождения с использованием помощи, важно корректно обнаруживать и классифицировать обнаруженные объекты или поверхности.
Сущность изобретения
Заявлен способ для обнаружения листвы, при этом способ содержит этапы, на которых:
- обнаруживают и отслеживают один или более признаков в рамках данных дальности из одного или более датчиков;
- определяют параметры отслеживания для каждого из одного или более признаков, причем параметры отслеживания содержат срок отслеживания и одно или более из согласованности обнаружения и переменности позиции; и
- классифицируют признак из одного или более признаков как соответствующий листве на основе параметров отслеживания.
Причем в заявленном способе классификация признака из одного или более признаков как соответствующего листве, содержит этап, на котором классифицируют как соответствующий листве на основе одного или более из срока отслеживания, опускающегося ниже порогового значения срока, согласованности обнаружения, опускающейся ниже порогового значения согласованности, или переменности позиции, превышающей пороговое значение переменности.
Причем в заявленном способе классификация признака из одного или более признаков содержит этап, на котором классифицируют первый признак, при этом способ дополнительно содержит этап, на котором классифицируют второй признак как соответствующий твердому объекту на основе параметров отслеживания.
Причем в заявленном способе классификация второго признака как соответствующего твердому объекту содержит этап, на котором классифицируют как соответствующий твердому объекту на основе одного или более из срока отслеживания, превышающего пороговое значение срока, согласованности обнаружения, превышающей пороговое значение согласованности, или переменности позиции, опускающейся ниже порогового значения переменности.
Причем в заявленном способе определение параметров отслеживания содержит этап, на котором определяют срок отслеживания, при этом определение срока отслеживания для характерного признака содержит этап, на котором определяют то, как долго характерный признак отслеживается или обнаруживается.
Причем в заявленном способе определение параметров отслеживания содержит этап, на котором определяют согласованность обнаружения, при этом определение согласованности обнаружения для характерного признака содержит этап, на котором определяют процент или отношение кадров, в которых признак обнаружен в период времени.
Причем в заявленном способе определение параметров отслеживания содержит этап, на котором определяют переменность позиции, при этом определение переменности позиции для характерного признака содержит этап, на котором определяют среднеквадратическое отклонение для одного или более из позиции и ориентации характерного признака.
Заявленный способ дополнительно содержит этап, на котором определяют то, следует или нет избегать удара о помеху, соответствующую признаку из одного или более признаков, на основе классификации признака.
Заявленный способ дополнительно содержит этап, на котором определяют маневр при вождении для транспортного средства на основе классификации признака.
Также заявлена систем, содержащая:
- компонент отслеживания, выполненный с возможностью обнаруживать и отслеживать один или более признаков в рамках данных дальности из одного или более датчиков;
- компонент параметров отслеживания, выполненный с возможностью определять параметры отслеживания для каждого из одного или более признаков, причем параметры отслеживания содержат срок отслеживания и одно или более из согласованности обнаружения и переменности позиции; и
- компонент классификации, выполненный с возможностью классифицировать признак из одного или более признаков как соответствующий листве на основе параметров отслеживания.
В заявленной системе компонент классификации выполнен с возможностью классифицировать признак из одного или более признаков как соответствующий листве, посредством определения одного или более из следующего:
- срок отслеживания опускается ниже порогового значения возраста;
- согласованность обнаружения опускается ниже порогового значения согласованности; или
- переменность позиции превышает пороговое значение переменности.
В заявленной системе классификация признака из одного или более признаков содержит классификацию первого признака, при этом компонент классификации дополнительно выполнен с возможностью классифицировать второй признак как соответствующий твердому объекту на основе параметров отслеживания.
В заявленной системе компонент классификации выполнен с возможностью классифицировать второй признак как соответствующий твердому объекту на основе одного или более из следующего:
- срока отслеживания, превышающего пороговое значение возраста;
- согласованности обнаружения, превышающей пороговое значение согласованности; или
- переменности позиции, опускающейся ниже порогового значения переменности.
В заявленной системе компонент параметров отслеживания выполнен с возможностью определять параметры отслеживания, содержащие одно или более из следующего:
- срока отслеживания, при этом компонент параметров отслеживания выполнен с возможностью определять срок отслеживания для характерного признака посредством определения того, как долго характерный признак отслеживается или обнаруживается;
- согласованности обнаружения, при этом компонент параметров отслеживания выполнен с возможностью определять согласованность обнаружения для характерного признака посредством определения процента или отношения кадров, в которых признак обнаружен в период времени; или
- переменности позиции, при этом компонент параметров отслеживания выполнен с возможностью определять переменность позиции для характерного признака посредством определения среднеквадратического отклонения для одного или более из позиции и ориентации характерного признака.
Способ дополнительно содержит компонент объезда помех, выполненный с возможностью осуществлять одно или более из следующего:
- определять то, следует или нет избегать удара о помеху, соответствующую признаку из одного или более признаков, на основе классификации признака; или
- определять маневр при вождении для транспортного средства на основе классификации признака.
Заявлены машиночитаемые носители хранения данных, сохраняющие инструкции, которые, при выполнении посредством одного или более процессоров, инструктируют одному или более процессоров:
- обнаруживать и отслеживать один или более признаков в рамках данных дальности из одного или более датчиков;
- определять параметры отслеживания для каждого из одного или более признаков, причем параметры отслеживания содержат срок отслеживания и одно или более из согласованности обнаружения и переменности позиции; и
- классифицировать признак из одного или более признаков как соответствующий листве на основе параметров отслеживания.
В заявленных машиночитаемых носителях хранения данных инструкции инструктируют одному или более процессорам классифицировать признак из одного или более признаков как соответствующий листве, посредством определения одного или более из следующего:
- срока отслеживания, опускающегося ниже порогового значения возраста;
- согласованности обнаружения, опускающейся ниже порогового значения согласованности; или
- переменности позиции, превышающей пороговое значение переменности.
В заявленных машиночитаемых носителях хранения данных классификация признака из одного или более признаков содержит классификацию первого признака, при этом инструкции дополнительно инструктируют одному или более процессоров классифицировать второй признак как соответствующий твердому объекту на основе параметров отслеживания.
В заявленных машиночитаемых носителях хранения данных инструкции инструктируют одному или более процессорам классифицировать второй признак как соответствующий твердому объекту на основе одно или более из следующего:
- срока отслеживания, превышающего пороговое значение возраста;
- согласованности обнаружения, превышающей пороговое значение согласованности; или
- переменности позиции, опускающейся ниже порогового значения переменности.
В заявленных машиночитаемых носителях хранения данных инструкции инструктируют одному или более процессорам определять параметры отслеживания посредством определения одного или более из следующего:
- срока отслеживания, при этом инструкции инструктируют одному или более процессорам определять срок отслеживания для характерного признака посредством определения того, как долго характерный признак отслеживается или обнаруживается;
- согласованности обнаружения, при этом инструкции инструктируют одному или более процессорам определять согласованность обнаружения для характерного признака посредством определения процента или отношения кадров, в которых признак обнаружен в период времени; или
- переменности позиции, при этом инструкции инструктируют одному или более процессорам определять переменность позиции для характерного признака посредством определения среднеквадратического отклонения для одного или более из позиции и ориентации характерного признака.
Краткое описание чертежей
[0003] Неограничивающие и неисчерпывающие реализации настоящего раскрытия сущности описаны со ссылками на следующие чертежи, на которых аналогичные ссылки с номерами ссылаются на аналогичные элементы на различных видах, если не указано иное. Преимущества настоящего раскрытия сущности должны лучше пониматься относительно нижеприведенного описания и прилагаемых чертежей, на которых:
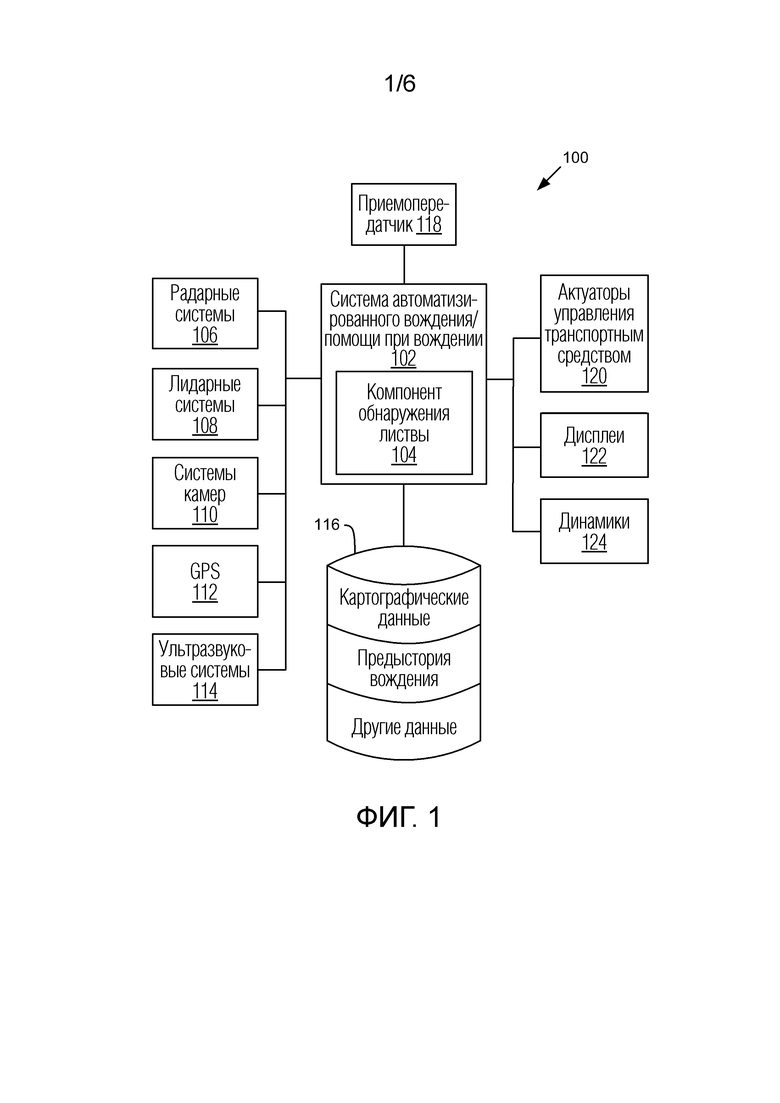
[0004] Фиг. 1 является принципиальной блок-схемой, иллюстрирующей реализацию системы управления транспортным средством, которая включает в себя систему автоматизированного вождения/помощи при вождении, согласно одному варианту осуществления;
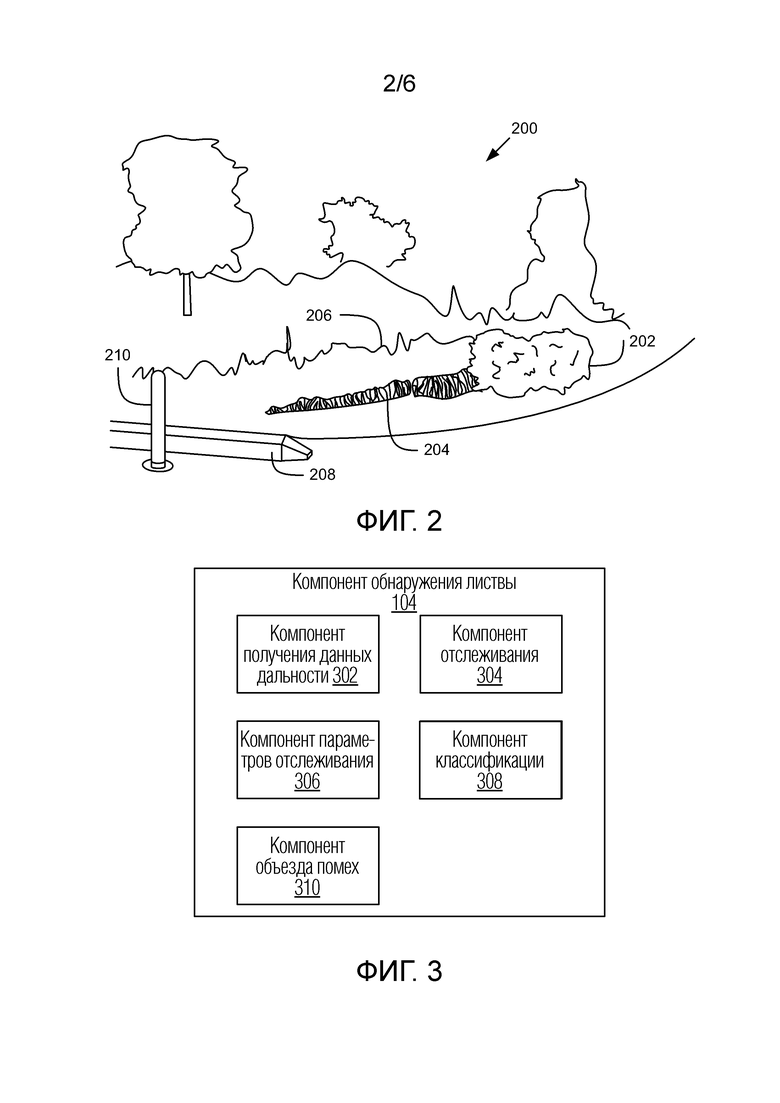
[0005] Фиг. 2 иллюстрирует вид листвы в области около дороги;
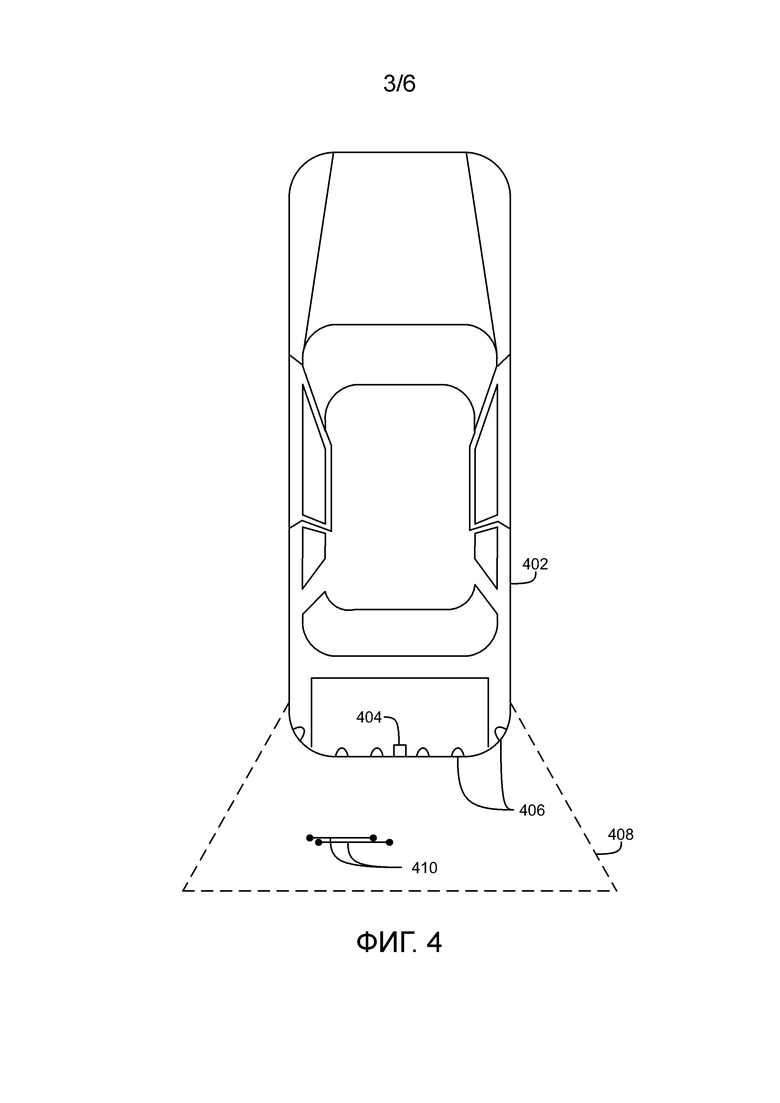
[0006] Фиг. 3 является принципиальной блок-схемой, иллюстрирующей примерные компоненты компонента обнаружения листвы, согласно одной реализации;
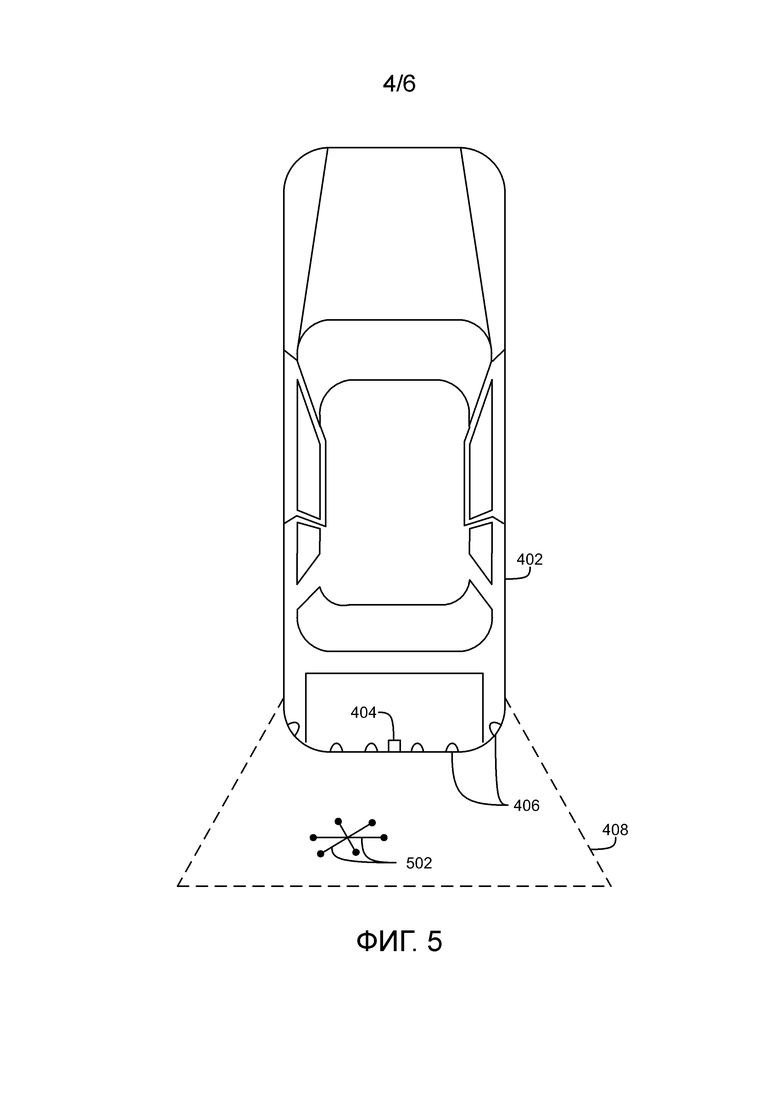
[0007] Фиг. 4 является схематичным видом в плане сверху транспортного средства и обнаруженных признаков твердого объекта около транспортного средства, согласно одной реализации;
[0008] Фиг. 5 является схематичным видом в плане сверху транспортного средства и обнаруженных признаков листвы около транспортного средства, согласно одной реализации;
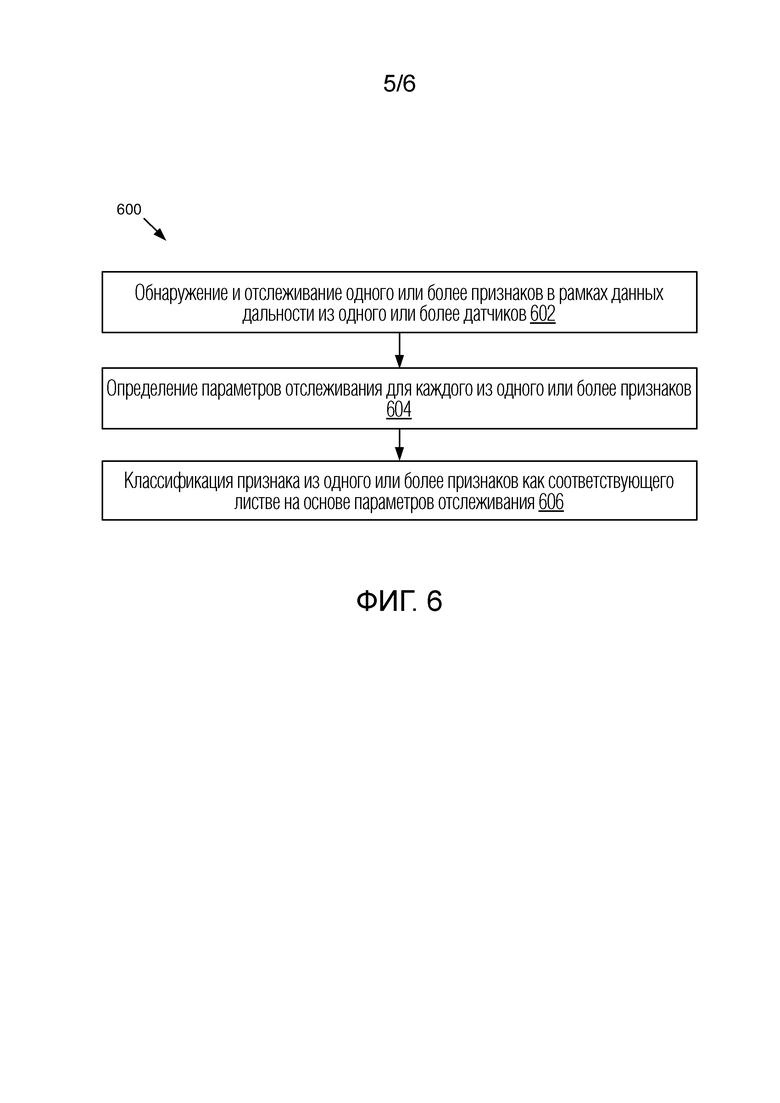
[0009] Фиг. 6 является принципиальной блок-схемой, иллюстрирующей способ для обнаружения листвы, согласно одной реализации; и
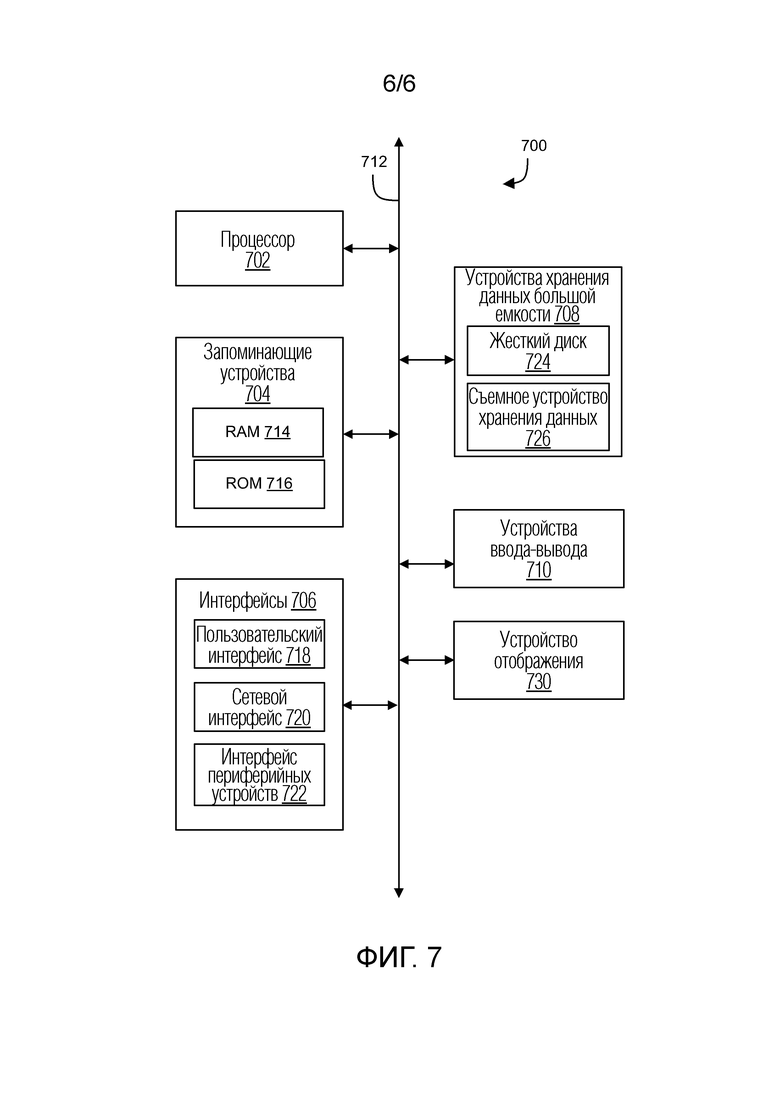
[0010] Фиг. 7 является принципиальной блок-схемой, иллюстрирующей вычислительную систему, согласно одной реализации.
Подробное описание изобретения
[0011] Активные и пассивные признаки безопасности транспортных средств могут базироваться в значительной степени на датчиках (ультразвуковом, камере, радарном и т.д.) для того, чтобы точно обнаруживать, классифицировать и отслеживать объекты в окружении. Активные признаки транспортного средства, такие как усиление при экстренном торможении, помощь в предотвращении прямых столкновений и т.п., нацелены на торможение, чтобы объезжать твердые объекты (например, стены, опоры линии электропередач, пешеходов, автомобили), которые потенциально приводят к авариям.
[0012] Технологии ассоциирования и отслеживания данных могут представлять собой используемые технологии для того, чтобы обнаруживать и оценивать траекторию потенциальных помех. Датчики дальности (например, ультразвуковой, лидарный, радарный или другие датчики) предоставляют обнаружения, включающие в себя координаты (например, двумерные координаты X, Y) и скорости для помех или признаков в их поле зрения. Эта информация может использоваться посредством технологии отслеживания для того, чтобы идентифицировать и отслеживать объекты в передвижном окружении. Технология отслеживания может обнаруживать объекты или признаки в кадре и создавать треклеты, соответствующие каждому объекту или признаку. Термин "треклет" при использовании в данном документе предоставляется для того, чтобы означать объект данных, используемый для того, чтобы отслеживать объект или признак в рамках данных датчиков.
[0013] Тем не менее, заявители распознают, что листва, к примеру, открытые пространства с травой, небольшими кустами, свисающими ветками и т.п., не обязательно представляют собой опасности для движущегося транспортного средства, но могут обнаруживаться в качестве твердых объектов посредством датчиков дальности, таких как ультразвуковые датчики, (лидарные) датчики на основе оптического обнаружения и дальнометрии или радарные датчики. Таким образом, допустимый треклет может формироваться для листвы, а также для твердых объектов. Эти обнаружения потенциально могут приводить к большому количеству ложных аварийных сигналов от признаков активной безопасности транспортных средств и к неудобству от признаков пассивной безопасности транспортных средств, многократно оповещающих водителя. Заявители распознают, что способность различать листву в этих сценариях должна быть полезной для обеспечения комфортного и безопасного опыта эксплуатации пользователю транспортного средства.
[0014] Заявители разрабатывают и раскрывают в данном документе системы, способы и устройства для того, чтобы отличать объекты листвы от других твердых объектов в данных дальности. Согласно одному варианту осуществления, система для обнаружения и идентификации листвы включает в себя компонент отслеживания, компонент параметров отслеживания и компонент классификации. Компонент отслеживания выполнен с возможностью обнаруживать и отслеживать один или более признаков в рамках данных дальности из одного или более датчиков. Компонент параметров отслеживания выполнен с возможностью определять параметры отслеживания для каждого из одного или более признаков. Параметры отслеживания включают в себя срок отслеживания и одно или более из согласованности обнаружения и переменности позиции. Компонент классификации выполнен с возможностью классифицировать признак из одного или более признаков как соответствующий листве на основе параметров отслеживания.
[0015] Данные, полученные из дальномеров (или другие данные датчиков), наряду со способами, алгоритмами, системами и устройствами, поясненными в данном документе, предоставляют возможность изучения трех аспектов треклета, а именно, срока, согласованности и переменности. Срок треклета представляет собой индикатор относительно того, как долго допустимый объект обнаруживается посредством алгоритма отслеживания. Согласованность треклета включает в себя индикатор относительно того, насколько согласованными являются данные датчиков для объекта, отслеживаемого во времени. Переменность треклета может включать в себя индикатор относительно среднеквадратического отклонения позиции обнаружений для объекта во времени и/или переменности ориентации точек данных в/для треклета, способствующей объекту во времени.
[0016] По сравнению с твердыми объектами, такими как стена, листва имеет уникальную сигнатуру в сроке, согласованности и переменности. Для срока, дальномеры или данные дальности могут обнаруживать различные части (листья, ветки и т.д.) листвы в течение времени и, как следствие, формировать несколько треклетов. Эти треклеты не получают согласованные данные во времени и, как следствие, имеют тенденцию исчезать раньше по сравнению с треклетами твердого объекта. Это типично приводит к тому, что треклеты на основе листвы имеют меньший срок по сравнению с треклетами твердого объекта. Для согласованности, твердый объект имеет больше показаний, ассоциированных с ним в течение времени по сравнению с листвой. Для переменности, дальномеры или данные дальности обнаруживают различные части (листья, ветки и т.д.) листвы в течение времени, и обнаружения, предоставленные в треклет, могут иметь большее среднеквадратическое отклонение в позиции, а также ориентации по сравнению с твердыми статическими объектами. Эта уникальная сигнатура листвы может быть использована для того, чтобы отличать ее от других твердых объектов. После этого она может быть использована при принятии решения, в большей степени основанного на вычислениях, относительно торможения или других маневров при вождении или решений.
[0017] Ниже поясняются дополнительные варианты осуществления и примеры относительно чертежей.
[0018] Ссылаясь теперь на чертежи, фиг. 1 иллюстрирует примерную систему 100 управления транспортным средством. Система 100 управления транспортным средством включает в себя систему 102 автоматизированного вождения/помощи при вождении. Система 102 автоматизированного вождения/помощи при вождении может использоваться для того, чтобы автоматизировать или управлять работой транспортного средства или предоставлять помощь водителю-человеку. Например, система 102 автоматизированного вождения/помощи при вождении может управлять одним или более из торможения, руления, ускорения, световых индикаторов, оповещений, уведомлений водителей, радиосвязи, амортизации подвески либо любых других обеспечивающих вождение или вспомогательных систем транспортного средства. В другом примере, система 102 автоматизированного вождения/помощи при вождении может не иметь возможность предоставлять какое-либо управление вождением (например, руление, ускорение или торможение), но может предоставлять уведомления и оповещения, чтобы помогать водителю-человеку в безопасном вождении. Например, система 102 автоматизированного вождения/помощи при вождении может включать в себя один или более контроллеров (таких как контроллеры, поясненные в данном документе), которые предоставляют или принимают данные по контроллерной шине и используют данные для того, чтобы определять операции, которые должны выполняться, и/или предоставлять инструкции или сигналы для того, чтобы инициировать эти операции.
[0019] Система 100 управления транспортным средством также включает в себя одну или более систем/устройств датчиков для обнаружения присутствия близлежащих объектов, разделительных линий, ухабов, текстуры дороги и/или для определения местоположения родительского транспортного средства (например, транспортного средства, которое включает в себя систему 100 управления транспортным средством). Например, система 100 управления транспортным средством может включать в себя радарные системы 106, одну или более лидарных систем 108, одну или более систем 110 камер, глобальную систему 112 позиционирования (GPS) и/или ультразвуковые системы 114. Система 100 управления транспортным средством может включать в себя хранилище 116 данных для сохранения релевантных или полезных данных, таких как информация касательно транспортного средства (информация модели или рабочие характеристики транспортного средства), картографические данные, предыстория вождения (т.е. предыстория вождения) или другие данные. Система 100 управления транспортным средством также может включать в себя приемопередатчик 118 для беспроводной связи с мобильной или беспроводной сетью, другими транспортными средствами, инфраструктурой, облачными либо удаленными вычислительными ресурсами или ресурсами хранения или любой другой системой связи.
[0020] Система 100 управления транспортным средством может включать в себя актуаторы 120 управления транспортным средством для того, чтобы управлять различными аспектами вождения транспортного средства, такие как электромоторы, переключатели или другие актуаторы для того, чтобы управлять торможением, ускорением, рулением, подвеской и т.п. Система 100 управления транспортным средством может включать в себя один или более дисплеев 122, динамиков 124 или других устройств, так что могут предоставляться уведомления водителю-человеку или пассажиру. Дисплей 122 может включать в себя дисплей на лобовом стекле, дисплей или индикатор приборной панели, экран отображения или любой другой визуальный индикатор, который может быть виден водителем или пассажиром транспортного средства. Динамики 124 могут включать в себя один или более динамиков аудиосистемы транспортного средства или могут включать в себя динамик, предназначенный для уведомления водителя. Актуаторы 120 управления транспортным средством, дисплеи 122, динамики 124 или другие части системы 100 управления транспортным средством могут управляться посредством одного или более контроллеров системы 102 автоматизированного вождения/помощи при вождении.
[0021] В одном варианте осуществления, система 102 автоматизированного вождения/помощи при вождении предоставляет только помощь и управление транспортным средством в ходе вождения водителем-человеком. В одном варианте осуществления, система 102 автоматизированного вождения/помощи при вождении выполнена с возможностью управлять вождением или навигацией родительского транспортного средства. Например, система 102 автоматизированного вождения/помощи при вождении может управлять актуаторами 120 управления транспортным средством для того, чтобы ехать по пути в пределах полос движения на дороге, автомобильной парковке, подъездном пути или в другом местоположении. Например, система 102 автоматизированного вождения/помощи при вождении может определять путь на основе информации или данных восприятия, предоставленных посредством любого из компонентов 106-118. Системы/устройства 106-110 и 114 датчиков могут использоваться для того, чтобы получать данные датчиков в реальном времени, так что система 102 автоматизированного вождения/помощи при вождении может помогать водителю или осуществлять вождение транспортного средства в реальном времени. В одном варианте осуществления, система 102 автоматизированного вождения/помощи при вождении также использует информацию, сохраненную в предыстории вождения (локально или удаленно), для определения условий в текущем окружении. Система 102 автоматизированного вождения/помощи при вождении может реализовывать один или более алгоритмов, приложений, программ или функциональностей, которые осуществляют вождение или помогают в вождении транспортного средства.
[0022] Система 102 автоматизированного вождения/помощи при вождении может включать в себя компонент 104 обнаружения листвы для того, чтобы обнаруживать и/или классифицировать объекты как соответствующие листве. Компонент 104 обнаружения листвы может классифицировать признаки, треклеты или объекты в качестве твердых объектов или листвы для того, чтобы обеспечивать возможность системе 100 управления транспортным средством различать их. Листва может включать в себя листья, траву, кусты и/или ветки достаточной тонкости, тогда как твердые объекты могут включать в себя другие объекты, такие как люди, другие транспортные средства, бордюры, здания, опоры линии электропередач и т.п. Например, система 100 управления транспортным средством может иметь предпочтение для удара, контакта или проезда по листве по сравнению с ударом о твердый объект. Таким образом, система 100 управления транспортным средством может иметь возможность принимать решения касательного того, что является приемлемым или более приемлемым для удара. В одном варианте осуществления, система 102 автоматизированного вождения/помощи при вождении может вмешиваться, чтобы тормозить при твердых объектах, но может разрешать транспортному средству ударяться о листву.
[0023] Следует принимать во внимание, что вариант осуществления по фиг. 1 приводится только в качестве примера. Другие варианты осуществления могут включать в себя меньшее или большее число компонентов без отступления от объема раскрытия сущности. Дополнительно, проиллюстрированные компоненты могут комбинироваться или включаться в другие компоненты без ограничения.
[0024] Фиг. 2 иллюстрирует вид в перспективе области 200 около дороги, которая может наблюдаться с использованием данных дальности, полученных посредством транспортного средства. Область 200 включает в себя множество твердых объектов и листву, которая может обнаруживаться посредством датчика транспортного средства. В частности, листва включает в себя кусты 202, траву 204 и другие кустарниковые насаждения 206. В некоторых обстоятельствах, для транспортного средства может быть приемлемым входить в контакт или проезжать по листве, поскольку повреждение транспортного средства или человека может быть менее вероятным. Проиллюстрированные твердые объекты включают в себя бордюр 208 и опору 210 линии электропередач, которая может приводить к повреждению или вреду для транспортного средства, пассажира или самих объектов.
[0025] Данные дальности, собираемые посредством транспортного средства, могут формировать треклеты для твердых объектов 208, 210, а также для листвы 202, 204 и 206. Треклеты могут включать в себя одну или множество точек, соответствующих идентичному объекту или группе объектов. Треклеты могут включать в себя одну точку или группы точек в пространстве, которые имеют аналогичное местоположение и/или расстояние (дальность) и которые имеют тенденцию перемещаться вместе между кадрами. Кадры могут включать в себя любой тип кадра датчика, к примеру, последующие измерения данных лидара, данных радара, данных камер или ультразвуковых данных. Например, треклет может формироваться для точки на опоре 210 линии электропередач. Альтернативно, множество точек на опоре 210 линии электропередач могут группироваться, чтобы формировать один треклет. Треклет может отслеживаться между последующими кадрами (или измерениями), так что может отслеживаться перемещение соответствующего объекта или признака.
[0026] В одном варианте осуществления, компонент 104 обнаружения листвы может определять параметры, которые могут использоваться для того, чтобы отличать твердые объекты от листвы. Например, компонент 104 обнаружения листвы может определять одно или более из срока, согласованности или переменности для каждого из множества треклетов. На основе этих параметров, компонент 104 обнаружения листвы может классифицировать треклет или соответствующий объект в качестве листвы или твердого объекта. Местоположения, соответствующие треклетам твердых объектов, могут объезжаться в ходе вождения, тогда как местоположения, соответствующие треклетам листвы, могут разрешаться для вождения. В одном варианте осуществления, листва может объезжаться с более низким приоритетом по сравнению с твердыми объектами. Например, система 102 автоматизированного вождения/помощи при вождении при необходимости может выбирать между ударом о твердый объект и листву, и система 102 автоматизированного вождения/помощи при вождении может выбирать ударяться об или проезжать по листве вместо удара о твердый объект. Аналогично, признаки помощи при вождении могут предоставлять уведомления для присутствия листвы (или игнорировать листву), но предоставлять предупреждение или другой тип уведомления для присутствия твердых объектов. Например, трава, растущая между выбоинами или следами от шин на грунтовой дороге, не должна приводить к торможению или аварийным сигналам. Аналогично, если авария является неизбежной, система 102 автоматизированного вождения/помощи при вождении может быть менее ограничивающей в отношении удара о кусты или кустарниковые насаждения по сравнению, например, с пешеходами, другими транспортными средствами или объектами. Следует отметить, что стволы деревьев, большие ветки и т.п. могут идентифицироваться в качестве твердых объектов наряду с опорой 210 линии электропередач и/или бордюром 208, так что эти типы объектов могут объезжаться.
[0027] Обращаясь к фиг. 3, показана принципиальная блок-схема, иллюстрирующая компоненты для компонента 104 обнаружения листвы, согласно одному варианту осуществления. Компонент 104 обнаружения листвы включает в себя компонент 302 данных дальности, компонент 304 отслеживания, компонент 306 параметров отслеживания, компонент 308 классификации и компонент 310 объезда помех. Компоненты 302-310 задаются только для иллюстрации и не обязательно могут включаться во все варианты осуществления. Фактически, некоторые варианты осуществления могут включать в себя только один или любую комбинацию из двух или более из компонентов 302-310. Например, некоторые компоненты 302-310 могут быть расположены за пределами компонента 104 обнаружения листвы, к примеру, в системе 102 автоматизированного вождения/помощи при вождении.
[0028] Компонент 302 данных дальности выполнен с возможностью получать данные дальности для области около транспортного средства. Например, данные дальности могут включать в себя данные из/на основе данных из одного или более датчиков транспортного средства или системы 100 управления транспортным средством для транспортного средства. В одном варианте осуществления, данные дальности могут включать в себя данные из ультразвукового датчика, радарной системы, лидарной системы и т.п. В одном варианте осуществления, данные дальности могут включать в себя данные дальности, сформированные из данных изображений, собираемых посредством камеры. Например, изображения, снятые камерой, могут обрабатываться, чтобы идентифицировать признаки, обнаруживать объекты и определять расстояния до объектов или признаков. Данные дальности могут включать в себя любой тип данных, которые указывают расстояние до точек или объектов. Например, данные дальности могут включать в себя данные, которые указывают расстояние между транспортным средством или датчиком и объектом, которые могут быть полезными при определении расстояний до объектов в поле зрения датчика. Лидар, например, получает расстояние до каждой точки в поле зрения лидарного датчика. Аналогично, данные камер могут обрабатываться, чтобы формировать данные дальности для одной или более точек в поле зрения камеры.
[0029] Компонент 304 отслеживания выполнен с возможностью обнаруживать и отслеживать признаки или точки во времени. В одном варианте осуществления, компонент 304 отслеживания коррелирует признаки или точки в первом кадре данных дальности (данные дальности, собираемые в первый момент времени) с признаками или точками во втором кадре данных дальности (данными дальности, собираемыми во второй момент времени). Посредством корреляции признаков или точек, компонент 304 отслеживания может отслеживать присутствие или перемещение объектов во времени.
[0030] Компонент 306 параметров отслеживания выполнен с возможностью определять параметры отслеживания для одного или более признаков в данных дальности. Признаки могут включать в себя точки или треклеты, которые отслеживаются или отслежены посредством компонента 304 отслеживания. Например, компонент 304 отслеживания может формировать и сохранять информацию относительно позиции или местоположения каждого признака во времени. На основе этих данных, компонент 306 параметров отслеживания может определять одну или более характеристик или параметров относительно перемещения, позиций или других подробностей признака. В одном варианте осуществления, компонент 306 параметров отслеживания определяет одно или более из срока отслеживания, согласованности обнаружения и переменности позиции признака.
[0031] Компонент 306 параметров отслеживания может определять параметры, указывающие срока признака. В одном варианте осуществления, компонент 306 параметров отслеживания может определять отслеживания для характерного признака посредством определения того, как долго характерный признак отслеживается или обнаруживается. Например, компонент 306 параметров отслеживания может определять то, что признак отслеживается в течение конкретного числа кадров или конкретного количества времени. В одном варианте осуществления, срок отслеживания может быть целым числом, указывающим число кадров, когда признак обнаружен или отслежен. В другом варианте осуществления, срок отслеживания может быть периодом времени в миллисекундах или секундах, указывающим первый раз, когда признак обнаружен.
[0032] Компонент 306 параметров отслеживания может определять параметры, указывающие согласованность или то, насколько согласованно признак обнаружен и отслежен. В одном варианте осуществления, компонент 306 параметров отслеживания может определять согласованность обнаружения для признака, указывающую то, насколько согласованно, за период времени, признак обнаружен и/или отслежен. В одном варианте осуществления, согласованность обнаружения может быть отношением кадров в период времени, в который обнаружен признак, к общему числу кадров данных дальности в период времени. Например, отношение может составлять дробную часть, к примеру, 9/10, 5/10 и т.п. В одном варианте осуществления, согласованность обнаружения является процентом кадров, в которых признак обнаружен в период времени. Например, компонент 306 параметров отслеживания может определять то, что компонент 304 отслеживания обнаруживает признак в 90%, 50% или в некоторой другой процентной доле кадров в период времени.
[0033] Компонент 306 параметров отслеживания может определять параметры, указывающие переменность в том, где обнаруживается признак. В одном варианте осуществления, компонент 306 параметров отслеживания может определять переменность позиции для признака, указывающую то, насколько переменной является позиция признака за период времени. В одном варианте осуществления, переменность позиции может включать в себя среднеквадратическое отклонение для местоположения признака. Например, признак может иметь небольшое или большое среднеквадратическое отклонение при перемещении между кадрами. Среднеквадратическое отклонение для объекта, признака или треклета может включать в себя значение в единицах расстояния (например, в дюймах, сантиметрах и т.п.) для перемещения объекта, признака или треклета относительно транспортного средства. Объект, который перемещается на большее расстояние или перемещается более произвольно, может иметь более высокое среднеквадратическое отклонение, тогда как объект, который не перемещается или перемещается только в одном направлении (например, приблизительно линейно относительно транспортного средства), может иметь более низкое среднеквадратическое отклонение. В одном варианте осуществления, переменность позиции может включать в себя среднеквадратическое отклонение для ориентации признака или объекта. Например, среднеквадратическое отклонение для ориентации может указывать угол поверхности объекта, определенный посредством двух или более признаков или точек на объекте. Среднеквадратическое отклонение для объекта, признака или треклета может включать в себя угловое значение (например, в градусах) для вращательного перемещения транспортного средства. Признак, треклет или объект, который измеряется и, как кажется, вращается, трясется или скручивается сильно или непрогнозируемо, может иметь более высокое угловое среднеквадратическое отклонение, тогда как объект, который, как кажется, не вращается, трясется или скручивается очень сильно, может иметь более низкое среднеквадратическое отклонение.
[0034] Фиг. 4 является принципиальной схемой, иллюстрирующей обнаружение твердого объекта. Транспортное средство 402 включает в себя камеру 404 и множество ультразвуковых датчиков 406, которые наблюдают объекты или поверхности в поле 408 зрения. Например, камера 404 может включать в себя резервную камеру, и ультразвуковые датчики 406 могут включать в себя датчики, которые являются частью ультразвуковой системы 114. Ультразвуковые датчики 406 и/или камера 404 могут формировать (или использоваться для того, чтобы формировать) данные дальности для объектов в поле 408 зрения. Линии 410 представляют позиции и ориентации признаков или треклетов, отслеживаемых посредством компонента 304 отслеживания во времени. Например, линии 410 находятся близко друг к другу и являются параллельными, что указывает несущественное перемещение (близко друг к другу) и/или отсутствие вращения (параллельно). Таким образом, линии 410 показывают небольшое или несущественное варьирование позиции и/или угла соответствующих объектов и в силу этого могут определяться посредством компонента 306 параметров отслеживания как имеющие небольшое варьирование (например, среднеквадратическое отклонение) местоположения и/или ориентации.
[0035] Фиг. 5 является принципиальной схемой иллюстрирующей обнаружение листвы. Линии 502 представляют позиции и ориентации признаков или треклетов, отслеживаемых посредством компонента 304 отслеживания во времени. Например, линии 502 находятся близко друг к другу, но имеют существенно отличающиеся ориентации, указывающие, возможно, несущественное перемещение, но существенное вращение или изменения ориентации, по меньшей мере, согласно обнаружению. Таким образом, линии 502 показывают небольшое или несущественное варьирование позиции, но показывают большие и случайные изменения углов или ориентации соответствующих объектов во времени и в силу этого могут определяться посредством компонента 306 параметров отслеживания как имеющие большое варьирование (например, стандартное варьирование) ориентации, но небольшое варьирование местоположения.
[0036] Следует отметить, что хотя фиг. 4 и 5 иллюстрируют использование камеры и ультразвуковых датчиков, другие варианты осуществления могут включать в себя любой тип датчика, допускающего формирование или использование для того, чтобы формировать данные дальности, такие как лидарные или радарные системы.
[0037] Возвращаясь к фиг. 3, компонент 308 классификации выполнен с возможностью классифицировать признак из одного или более признаков как соответствующий листве на основе параметров отслеживания. Например, компонент 308 классификации может классифицировать признак в качестве листвы или твердого объекта на основе значений для параметров срока, согласованности и/или переменности, определенных посредством компонента параметров отслеживания. Например, компонент 308 классификации может классифицировать объект в качестве листвы, если его соответствующие признаки или треклеты имеют низкий срок, низкую согласованность и/или высокую переменность. Например, если срок отслеживания опускается ниже порогового значения срока, согласованность обнаружения опускается ниже порогового значения согласованности, и/или переменность позиции превышает пороговое значение переменности, признак может идентифицироваться в качестве листвы. Аналогично, если срок отслеживания превышает пороговое значение срока, согласованность обнаружения превышает пороговое значение согласованности, и/или переменность позиции опускается ниже порогового значения переменности, признак может идентифицироваться в качестве твердого объекта. В одном варианте осуществления, более сложные комбинации этих значений могут обнаруживаться как соответствующие твердому объекту или листве. Например, нейронная сеть, алгоритм машинного обучения или другой алгоритм может использоваться для того, чтобы определять то, соответствует либо нет признак или треклет листве или объекту, чтобы захватывать более незначительные отличия в том, как срок, согласованность и/или переменность затрагивает классификацию.
[0038] Компонент 310 объезда помех выполнен с возможностью определять то, должна или нет объезжаться область или местоположение, соответствующее признаку или треклету, посредством автоматизированного способа или водителем-человеком. В одном варианте осуществления, компонент 310 объезда помех может определять то, что местоположения, соответствующие твердым объектам, должны объезжаться (например, система объезда помех должна тормозить, если столкновение кажется вероятным). В одном варианте осуществления, компонент 310 объезда помех может определять то, что местоположения, соответствующие листве, не обязательно должны объезжаться или должны объезжаться с более низким приоритетом по сравнению с твердыми объектами. В одном варианте осуществления, компонент 310 объезда помех определяет то, следует или нет избегать удара о помеху, соответствующую признаку из одного или более признаков, на основе классификации признака в качестве листвы или твердого объекта. Например, компонент 310 объезда помех может определять маневр при вождении для транспортного средства на основе классификации признака. Маневр при вождении может включать в себя маневр, который объезжает твердые объекты, но заключает в себе проезд по или наезд на листву.
[0039] В одном варианте осуществления, компонент 310 объезда помех может предоставлять индикатор относительно местоположений листвы, твердых объектов и т.п. в систему 100 управления транспортным средством для принятия решений или уведомлений водителя. Например, водитель может уведомляться относительно присутствия листвы или твердого объекта. В качестве другого примера, система 102 автоматизированного вождения/помощи при вождении может тормозить, если транспортное средство приближается слишком близко к твердому объекту, при разрешении транспортному средству приближаться и/или даже контактировать с листвой без торможения.
[0040] Фиг. 6 является блок-схемой последовательности операций, иллюстрирующей способ 600 для обнаружения листвы. Способ 600 может осуществляться посредством системы обнаружения листвы или системы управления транспортным средством, такой как система 104 обнаружения листвы фиг. 1 или 3 или система 100 управления транспортным средством по фиг. 1.
[0041] Способ 600 начинается, и компонент 304 отслеживания обнаруживает и отслеживает на этапе 602 один или более признаков в рамках данных дальности из одного или более датчиков. Компонент 306 параметров отслеживания определяет на этапе 604 параметры отслеживания для каждого из одного или более признаков. Параметры отслеживания включают в себя срок отслеживания и одно или более из согласованности обнаружения и переменности позиции. Компонент 308 классификации классифицирует на этапе 606 признак из одного или более признаков как соответствующий листве на основе параметров отслеживания. Классификация и/или местоположения листвы или твердых объектов могут предоставляться в систему управления для избегания и/или принятия решений.
[0042] Ссылаясь теперь на фиг. 7, проиллюстрирована блок-схема примерного вычислительного устройства 700. Вычислительное устройство 700 может использоваться для того, чтобы выполнять различные процедуры, к примеру, процедуры, поясненные в данном документе. Вычислительное устройство 700 может выступать в качестве компонента 104 обнаружения листвы, системы 102 автоматизированного вождения/помощи при вождении и т.п. Вычислительное устройство 700 может выполнять различные функции мониторинга, как пояснено в данном документе, и может выполнять одну или более прикладных программ, к примеру, прикладных программ или функциональности, описанные в данном документе. Вычислительное устройство 700 может представлять собой любое из широкого спектра вычислительных устройств, таких как настольный компьютер, компьютер в тире, система управления транспортным средством, ноутбук, серверный компьютер, карманный компьютер, планшетный компьютер и т.п.
[0043] Вычислительное устройство 700 включает в себя один или более процессоров 702, одно или более запоминающих устройств 704, один или более интерфейсов 706, одно или более устройств 708 хранения данных большой емкости, одно или более устройств 710 ввода-вывода и устройство 730 отображения, все из которых соединяются с шиной 712. Процессоры 702 включают в себя один или более процессоров или контроллеров, которые выполняют инструкции, сохраненные в запоминающих устройствах 704 и/или в устройствах 708 хранения данных большой емкости. Процессоры 702 также могут включать в себя различные типы машиночитаемых носителей, таких как кэш-память.
[0044] Запоминающие устройства 704 включают в себя различные машиночитаемые носители, такие как энергозависимое запоминающее устройство (например, оперативное запоминающее устройство 714 (RAM)) и/или энергонезависимое запоминающее устройство (например, постоянное запоминающее устройство 716 (ROM)). Запоминающие устройства 704 также могут включать в себя перезаписываемое ROM, такое как флэш-память.
[0045] Устройства 708 хранения данных большой емкости включают в себя различные машиночитаемые носители, такие как магнитные ленты, магнитные диски, оптические диски, полупроводниковое запоминающее устройство (например, флэш-память) и т.д. Как показано на фиг. 7, конкретное устройство хранения данных большой емкости представляет собой жесткий диск 724. Различные приводы также могут быть включены в устройства 708 хранения данных большой емкости, чтобы предоставлять считывание из и/или запись в различные машиночитаемые носители. Устройства 708 хранения данных большой емкости включают в себя съемные носители 726 и/или стационарные носители.
[0046] Устройства 710 ввода-вывода включают в себя различные устройства, которые обеспечивают возможность ввода или извлечения данных и/или другой информации в/из вычислительного устройства 700. Примерные устройства 710 ввода-вывода включают в себя устройства управления курсором, клавиатуры, клавишные панели, микрофоны, мониторы или другие устройства отображения, динамики, принтеры, сетевые интерфейсные платы, модемы и т.п.
[0047] Устройство 730 отображения включает в себя любой тип устройства, допускающего отображение информации одному или более пользователям вычислительного устройства 700. Примеры устройства 730 отображения включают в себя монитор, терминал отображения, видеопроекционное устройство и т.п.
[0048] Интерфейсы 706 включают в себя различные интерфейсы, которые обеспечивают возможность вычислительному устройству 700 взаимодействовать с другими системами, устройствами или вычислительными окружениями. Примерные интерфейсы 706 могут включать в себя любое число различных сетевых интерфейсов 720, таких как интерфейсы с локальными вычислительными сетями (LAN), глобальными вычислительными сетями (WAN), беспроводными сетями и Интернетом. Другой интерфейс(ы) включает в себя пользовательский интерфейс 718 и интерфейс 722 периферийных устройств. Интерфейс(ы) 706 также может включать в себя один или более элементов 718 пользовательского интерфейса. Интерфейс(ы) 706 также может включать в себя один или более периферийных интерфейсов, таких как интерфейсы для принтеров, указательные устройства (мыши, сенсорную панель или любой подходящий пользовательский интерфейс, известный на сегодняшний день для специалистам в данной области техники или разработанных впоследствии), клавиатуры и т.п.
[0049] Шина 712 обеспечивает возможность процессорам 702, запоминающим устройствам 704, интерфейсам 706, устройствам 708 хранения данных большой емкости и устройствам 710 ввода-вывода обмениваться данными между собой, а также с другими устройствами или компонентами, соединенными с шиной 712. Шина 712 представляет одну или более из нескольких типов шинных структур, таких как системная шина, PCI-шина, IEEE-шина, USB-шина и т.д.
[0050] В целях иллюстрации, программы и другие исполняемые программные компоненты показаны в данном документе в качестве дискретных блоков, хотя следует понимать, что такие программы и компоненты могут постоянно размещаться в различные моменты времени в различных компонентах хранения данных вычислительного устройства 700 и выполняются посредством процессоров 702. Альтернативно, системы и процедуры, описанные в данном документе, могут реализовываться в аппаратных средствах либо в комбинации аппаратных средств, программного обеспечения и/или микропрограммного обеспечения. Например, одна или более специализированных интегральных схем (ASIC) могут программироваться с возможностью осуществлять одну или более систем и процедур, описанных в данном документе.
Примеры
[0051] Нижеприведенные примеры относятся к дополнительным вариантам осуществления.
[0052] Пример 1 представляет собой способ для обнаружения листвы. Способ включает в себя обнаружение и отслеживание одного или более признаков в рамках данных дальности из одного или более датчиков. Способ включает в себя определение параметров отслеживания для каждого из одного или более признаков. Параметры отслеживания включают в себя срок отслеживания и одно или более из согласованности обнаружения и переменности позиции. Способ включает в себя классификацию признака из одного или более признаков как соответствующего листве на основе параметров отслеживания.
[0053] В примере 2, классификация признака из одного или более признаков как соответствующего листве согласно примеру 1 включает в себя классификацию как соответствующего листве на основе одного или более из срока отслеживания, опускающегося ниже порогового значения срока, согласованности обнаружения, опускающейся ниже порогового значения согласованности, или переменности позиции, превышающей пороговое значение переменности.
[0054] В примере 3, классификация признака из одного или более признаков по любому из примеров 1-2 включает в себя классификацию первого признака, причем способ дополнительно включает в себя классификацию второго признака как соответствующего твердому объекту на основе параметров отслеживания.
[0055] В примере 4, классификация второго признака как соответствующего твердому объекту согласно примеру 3 включает в себя классификацию как соответствующего твердому объекту на основе одного или более из срока отслеживания, превышающего пороговое значение срока, согласованности обнаружения, превышающей пороговое значение согласованности, или переменности позиции, опускающейся ниже порогового значения переменности.
[0056] В примере 5, определение параметров отслеживания по любому из примеров 1-4 включает в себя определение срока отслеживания, при этом определение срока отслеживания для характерного признака содержит определение того, как долго характерный признак отслеживается или обнаруживается.
[0057] В примере 6, определение параметров отслеживания по любому из примеров 1-5 включает в себя определение согласованности обнаружения, при этом определение согласованности обнаружения для характерного признака содержит определение процента или отношения кадров, в которых признак обнаружен в период времени.
[0058] В примере 7, определение параметров отслеживания по любому из примеров 1-6 включает в себя определение переменности позиции, при этом определение переменности позиции для характерного признака содержит определение среднеквадратического отклонения для одного или более из позиции и ориентации характерного признака.
[0059] В примере 8 способ по любому из примеров 1-7 дополнительно включает в себя определение того, следует или нет избегать удара о помеху, соответствующую признаку из одного или более признаков, на основе классификации признака.
[0060] В примере 9 способ по любому из примеров 1-8 дополнительно включает в себя определение маневра при вождении для транспортного средства на основе классификации признака.
[0061] Пример 10 представляет собой систему, которая включает в себя компонент отслеживания, компонент параметров отслеживания и компонент классификации. Компонент отслеживания выполнен с возможностью обнаруживать и отслеживать один или более признаков в рамках данных дальности из одного или более датчиков. Компонент параметров отслеживания выполнен с возможностью определять параметры отслеживания для каждого из одного или более признаков, причем параметры отслеживания содержат срок отслеживания и одно или более из согласованности обнаружения и переменности позиции. Компонент классификации выполнен с возможностью классифицировать признак из одного или более признаков как соответствующий листве на основе параметров отслеживания.
[0062] В примере 11, компонент классификации по примеру 10 выполнен с возможностью классифицировать признак из одного или более признаков как соответствующий листве, посредством определения одного или более из следующего: срок отслеживания опускается ниже порогового значения срока; согласованность обнаружения опускается ниже порогового значения согласованности; или переменность позиции превышает пороговое значение переменности.
[0063] В примере 12, классификация признака из одного или более признаков по любому из примеров 10-11 включает в себя классификацию первого признака, при этом компонент классификации дополнительно выполнен с возможностью классифицировать второй признак как соответствующий твердому объекту на основе параметров отслеживания.
[0064] В примере 13, компонент классификации по примеру 12 выполнен с возможностью классифицировать второй признак как соответствующий твердому объекту на основе одного или более из следующего: срока отслеживания, превышающего пороговое значение срока; согласованности обнаружения, превышающей пороговое значение согласованности; или переменности позиции, опускающейся ниже порогового значения переменности.
[0065] В примере 14, компонент параметров отслеживания по любому из примеров 10-13 выполнен с возможностью определять параметры отслеживания, включающие в себя одно или более из следующего: срок отслеживания, при этом компонент параметров отслеживания выполнен с возможностью определять срок отслеживания для характерного признака посредством определения того, как долго характерный признак отслеживается или обнаруживается; согласованность обнаружения, при этом компонент параметров отслеживания выполнен с возможностью определять согласованность обнаружения для характерного признака посредством определения процента или отношения кадров, в которых признак обнаружен в период времени; или переменность позиции, при этом компонент параметров отслеживания выполнен с возможностью определять переменность позиции для характерного признака посредством определения среднеквадратического отклонения для одного или более из позиции и ориентации характерного признака.
[0066] В примере 15, система по п. 10 дополнительно содержит компонент объезда помех, выполненный с возможностью осуществлять одно или более из следующего: определять то, следует или нет избегать удара о помеху, соответствующую признаку из одного или более признаков, на основе классификации признака; или определять маневр при вождении для транспортного средства на основе классификации признака.
[0067] Пример 16 представляет собой машиночитаемые носители хранения данных, сохраняющие инструкции, которые, при выполнении посредством одного или более процессоров, инструктируют одному или более процессоров обнаруживать и отслеживать один или более признаков в рамках данных дальности из одного или более датчиков. Инструкции инструктируют одному или более процессоров определять параметры отслеживания для каждого из одного или более признаков, параметры отслеживания включают в себя срок отслеживания и одно или более из согласованности обнаружения и переменности позиции. Инструкции инструктируют одному или более процессоров классифицировать признак из одного или более признаков как соответствующий листве на основе параметров отслеживания.
[0068] В примере 17, инструкции инструктируют одному или более процессоров классифицировать признак из одного или более признаков как соответствующий листве по примеру 16 посредством определения одного или более из следующего: срока отслеживания, опускающегося ниже порогового значения срока; согласованности обнаружения, опускающейся ниже порогового значения согласованности; или переменности позиции, превышающей пороговое значение переменности.
[0069] В примере 18, классификация признака из одного или более признаков по любому из примеров 16-17 включает в себя классификацию первого признака, при этом инструкции дополнительно инструктируют одному или более процессоров классифицировать второй признак как соответствующий твердому объекту на основе параметров отслеживания.
[0070] В примере 19, инструкции инструктируют одному или более процессоров классифицировать второй признак как соответствующий твердому объекту по примеру 18 на основе одно или более из следующего: срок отслеживания, превышающий пороговое значение срока; согласованность обнаружения, превышающая пороговое значение согласованности; или переменность позиции, опускающаяся ниже порогового значения переменности.
[0071] В примере 20, инструкции инструктируют одному или более процессоров определять параметры отслеживания по любому из примеров 16-19 посредством определения одного или более из следующего: срока отслеживания, при этом инструкции инструктируют одному или более процессоров определять срок отслеживания для характерного признака посредством определения того, как долго характерный признак отслеживается или обнаруживается; согласованности обнаружения, при этом инструкции инструктируют одному или более процессоров определять согласованность обнаружения для характерного признака посредством определения процента или отношения кадров, в которых признак обнаружен в период времени; или переменности позиции, при этом инструкции инструктируют одному или более процессоров определять переменность позиции для характерного признака посредством определения среднеквадратического отклонения для одного или более из позиции и ориентации характерного признака.
[0072] Пример 21 представляет собой систему или устройство, которое включает в себя средство для реализации способа, системы или устройства, как указано в любом из примеров 1-20.
[0073] В вышеописанном раскрытии сущности, следует обратиться к прилагаемым чертежам, которые являются частью настоящего документа, и на которых показаны в качестве иллюстрации конкретные реализации, в которых может осуществляться на практике раскрытие сущности. Следует понимать, что могут использоваться другие реализации, и могут вноситься структурные изменения без отступления от объема настоящего раскрытия сущности. Ссылки в подробном описании на "один вариант осуществления", "вариант осуществления", "примерный вариант осуществления" и т.д. указывают то, что описанный вариант осуществления может включать в себя конкретный признак, структуру или характеристику, но каждый вариант осуществления не обязательно может включать в себя конкретный признак, структуру или характеристику. Кроме этого, такие фразы не обязательно ссылаются на один и тот же вариант осуществления. Дополнительно, когда конкретный признак, структура или характеристика описывается в связи с вариантом осуществления, представляется, что осуществление такого признака, структуры или характеристики в связи с другими вариантами осуществления, описанными или нет в явной форме, находится в пределах знаний специалистов в данной области техники.
[0074] Реализации систем, устройств и способов, раскрытых в данном документе, могут содержать либо использовать компьютер специального назначения или общего назначения, включающий в себя компьютерные аппаратные средства, такие как, например, один или более процессоров и системное запоминающее устройство, как пояснено в данном документе. Реализации в пределах объема настоящего раскрытия сущности также могут включать в себя физические и другие машиночитаемые носители для переноса или сохранения машиноисполняемых инструкций и/или структур данных. Такие машиночитаемые носители могу представлять собой любые доступные носители, к которым можно осуществлять доступ посредством компьютерной системы общего назначения или специального назначения. Машиночитаемые носители, которые сохраняют машиноисполняемые инструкции, представляют собой компьютерные носители (устройства) хранения данных. Машиночитаемые носители, которые переносят машиноисполняемые инструкции, представляют собой среды передачи. Таким образом, в качестве примера, а не ограничения, реализации раскрытия сущности могут содержать, по меньшей мере, два совершенно различных типа машиночитаемых носителей: компьютерные носители (устройства) хранения данных и среды передачи.
[0075] Компьютерные носители (устройства) хранения данных включают в себя RAM, ROM, EEPROM, CD-ROM, полупроводниковые накопители (SSD) (к примеру, на основе RAM), флэш-память, запоминающее устройство на фазовых переходах (PCM) или другие типы запоминающего устройства, другие устройства хранения на оптических дисках, устройства хранения данных на магнитных дисках или другие магнитные устройства хранения данных либо любой другой носитель, который может использоваться для того, чтобы сохранять требуемое средство программного кода в форме машиноисполняемых инструкций или структур данных, и к которому может осуществляться доступ посредством компьютера общего назначения или специального назначения.
[0076] Реализации устройств, систем и способов, раскрытых в данном документе, могут обмениваться данными по компьютерной сети. "Сеть" задается как одна или более линий связи для передачи данных, которые обеспечивают транспортировку электронных данных между компьютерными системами и/или модулями и/или другими электронными устройствами. Когда информация передается или предоставляется по сети или другим соединениям связи (проводным, беспроводным либо комбинации проводных и беспроводных) в компьютер, компьютер надлежащим образом рассматривает соединение в качестве среды передачи. Среды передачи могут включать в себя сеть и/или линии связи для передачи данных, которые могут использоваться для того, чтобы переносить требуемое средство программного кода в форме машиноисполняемых инструкций или структур данных, и к которым может осуществляться доступ посредством компьютера общего назначения или специального назначения. Комбинации вышеперечисленного также следует включать в число машиночитаемых носителей.
[0077] Машиночитаемые инструкции содержат, например, инструкции и данные, которые при выполнении в процессоре инструктируют компьютеру общего назначения, компьютеру специального назначения или устройству обработки специального назначения выполнять некоторую функцию или группу функций. Машиноисполняемые инструкции, например, могут представлять собой двоичные файлы, инструкции в промежуточном формате, к примеру, на языке ассемблера или даже в исходном коде. Хотя предмет изобретения описан на языке, характерном для структурных признаков и/или технологических этапов, следует понимать, что предмет изобретения, заданный в прилагаемой формуле изобретения, не обязательно ограничен описанными признаками или этапами, описанными выше. Наоборот, описанные признаки и этапы раскрываются как примерные формы реализации формулы изобретения.
[0078] Специалисты в данной области техники должны принимать во внимание, что раскрытие сущности может осуществляться на практике в сетевых вычислительных окружениях с множеством типов конфигураций компьютерных систем, включающих в себя компьютер на приборной панели транспортного средства, персональные компьютеры, настольные компьютеры, переносные компьютеры, процессоры сообщений, карманные устройства, многопроцессорные системы, микропроцессорные или программируемые бытовые электронные приборы, сетевые PC, миникомпьютеры, мэйнфреймы, мобильные телефоны, PDA, планшетные компьютеры, устройства поискового вызова, маршрутизаторы, коммутаторы, различные устройства хранения данных и т.п. Раскрытие сущности также может осуществляться на практике в распределенных системных окружениях, в которых локальные и удаленные компьютерные системы, которые соединены (посредством проводных линий связи для передачи данных, беспроводных линий связи для передачи данных или посредством комбинации проводных и беспроводных линий связи для передачи данных) через сеть, выполняют задачи. В распределенном системном окружении, программные модули могут размещаться как в локальных, так и в удаленных запоминающих устройствах.
[0079] Дополнительно, в надлежащих случаях, функции, описанные в данном документе, могут выполняться в одном или более из следующего: аппаратные средства, программное обеспечение, микропрограммное обеспечение, цифровые компоненты или аналоговые компоненты. Например, одна или более специализированных интегральных схем (ASIC) могут программироваться с возможностью осуществлять одну или более систем и процедур, описанных в данном документе. Конкретные термины используются во всем описании и в формуле изобретения для того, чтобы ссылаться на конкретные системные компоненты. Термины "модули" и "компоненты" используются в названиях определенных компонентов для того, чтобы отражать их независимость реализации в программном обеспечении, аппаратных средствах, схемах, датчиках и т.п. Специалисты в данной области техники должны принимать во внимание, что компоненты могут упоминаться под различными названиями. Этот документ не предназначен для того, чтобы проводить различие между компонентами, которые отличаются по названию, но не по функции.
[0080] Следует отметить, что варианты осуществления датчика, поясненные выше, могут содержать компьютерные аппаратные средства, программное обеспечение, микропрограммное обеспечение или любую комбинацию вышеозначенного, чтобы выполнять, по меньшей мере, часть их функций. Например, датчик может включать в себя машинный код, выполненный с возможностью приведения в исполнение в одном или более процессоров, и может включать в себя аппаратную логическую/электрическую схему, управляемую посредством машинного кода. Эти примерные устройства предоставляются в данном документе для цели иллюстрации и не имеют намерение быть ограничивающими. Варианты осуществления настоящего раскрытия сущности могут реализовываться в дополнительных типах устройств, как должно быть известно специалистам в данной области техники.
[0081] По меньшей мере, некоторые варианты осуществления раскрытия сущности направлены на компьютерные программные продукты, содержащие такую логику (например, в форме программного обеспечения), сохраненную на любом машиноприменимом носителе. Такое программное обеспечение, при выполнении в одном или более устройств обработки данных, инструктирует устройству работать так, как описано в данном документе.
[0082] Хотя выше описаны различные варианты осуществления настоящего раскрытия сущности, следует понимать, что они представлены только в качестве примера, а не ограничения. Специалистам в данной области техники должно быть очевидным, что различные изменения по форме и деталям могут вноситься без отступления от сущности и объема изобретения. Таким образом, объем охраны настоящего раскрытия сущности не должен ограничиваться любым из вышеописанных примерных вариантов осуществления, а должен определяться только в соответствии с нижеприведенной формулой изобретения и ее эквивалентами. Вышеприведенное описание представлено для целей иллюстрации и описания. Оно не предназначено для того, чтобы быть полным или чтобы ограничивать раскрытие сущности точной раскрытой формой. Множество модификаций и разновидностей возможно в свете вышеуказанных принципов. Дополнительно, следует отметить, что любые из вышеуказанных альтернативных реализаций могут использоваться в любой комбинации, требуемой для того, чтобы формировать дополнительные гибридные реализации раскрытия сущности.
[0083] Дополнительно, хотя описаны и проиллюстрированы конкретные реализации раскрытия сущности, раскрытие сущности не должно быть ограничено конкретными формами или компоновками частей, описанных и проиллюстрированных таким способом. Объем раскрытия сущности должен задаваться посредством формулы изобретения, прилагаемой к настоящему документу, всех будущих формул изобретения, предоставляемых здесь и в различных вариантах применения, и их эквивалентов.
Обнаруживают и отслеживают признаки в рамках данных дальности из датчиков. Рассчитывают параметры отслеживания для каждого из признаков, при этом параметры отслеживания содержат срок отслеживания и согласованность обнаружения или переменность позиции. Классифицируют признак как соответствующий листве на основе срока отслеживания, опускающегося ниже порогового значения срока или согласованности обнаружения, опускающейся ниже порогового значения согласованности, или переменности позиции, превышающей пороговое значение переменности. Определяют маневр при вождении для транспортного средства на основе классификации признака и предоставляют маневр при вождении на систему автоматизированного вождения/помощи при вождении для выполнения транспортным средством. Предложены также система обнаружения листвы и невременный машиночитаемый носитель хранения данных. Достигается обнаружение листвы. 3 н. и 14 з.п. ф-лы, 7 ил.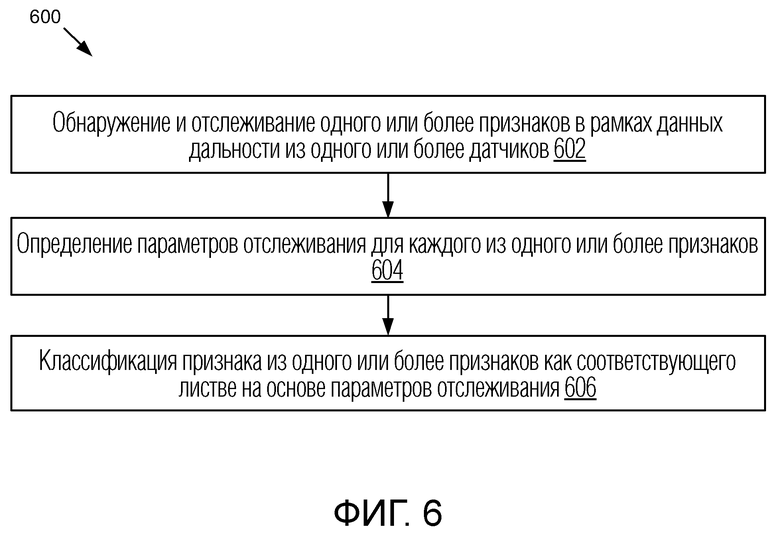
1. Способ для обнаружения листвы, при этом способ содержит этапы, на которых:
обнаруживают и отслеживают один или более признаков в рамках данных дальности из одного или более датчиков;
рассчитывают параметры отслеживания для каждого из одного или более признаков, при этом параметры отслеживания содержат срок отслеживания и одно или более из согласованности обнаружения и переменности позиции; и
классифицируют по меньшей мере один признак из одного или более признаков как соответствующий листве на основе одного или более из срока отслеживания, опускающегося ниже порогового значения срока, согласованности обнаружения, опускающейся ниже порогового значения согласованности, или переменности позиции, превышающей пороговое значение переменности; и
определяют маневр при вождении для транспортного средства на основе классификации по меньшей мере одного признака и предоставляют маневр при вождении на систему автоматизированного вождения/помощи при вождении для выполнения транспортным средством.
2. Способ по п. 1, в котором классификация признака из одного или более признаков содержит этап, на котором классифицируют первый признак, при этом способ также содержит этап, на котором классифицируют второй признак как соответствующий твердому объекту на основе параметров отслеживания.
3. Способ по п. 2, в котором классификация второго признака как соответствующего твердому объекту содержит этап, на котором классифицируют как соответствующий твердому объекту на основе одного или более из срока отслеживания, превышающего пороговое значение срока, согласованности обнаружения, превышающей пороговое значение согласованности, или переменности позиции, опускающейся ниже порогового значения переменности.
4. Способ по п. 1, в котором определение параметров отслеживания содержит этап, на котором определяют срок отслеживания, при этом определение срока отслеживания для характерного признака содержит этап, на котором определяют то, как долго характерный признак отслеживается или обнаруживается.
5. Способ по п. 1, в котором определение параметров отслеживания содержит этап, на котором определяют согласованность обнаружения, при этом определение согласованности обнаружения для характерного признака содержит этап, на котором определяют процент или отношение кадров, в которых признак обнаружен в период времени.
6. Способ по п. 1, в котором определение параметров отслеживания содержит этап, на котором определяют переменность позиции, при этом определение переменности позиции для характерного признака содержит этап, на котором определяют среднеквадратическое отклонение для одного или более из позиции и ориентации характерного признака.
7. Способ по п. 1, содержащий также этап, на котором определяют то, следует или нет избегать удара о помеху, соответствующую признаку из одного или более признаков, на основе классификации признака.
8. Способ по п. 1, в котором этап, на котором определяют маневр при вождении для транспортного средства на основе классификации по меньшей мере одного признака содержит этап, на котором определяют, что местоположение, соответствующее листве, должно объезжаться с более низким приоритетом по сравнению с твердым объектом.
9. Система обнаружения листвы, содержащая:
компонент отслеживания, выполненный с возможностью обнаруживать и отслеживать один или более признаков в рамках данных дальности из одного или более датчиков;
компонент параметров отслеживания, выполненный с возможностью рассчитывать параметры отслеживания для каждого из одного или более признаков, при этом параметры отслеживания содержат срок отслеживания и одно или более из согласованности обнаружения и переменности позиции; и
компонент классификации, выполненный с возможностью классифицировать по меньшей мере один признак из одного или более признаков как соответствующий листве на основе одного или более из срока отслеживания, опускающегося ниже порогового значения срока, согласованности обнаружения, опускающейся ниже порогового значения согласованности, или переменности позиции, превышающей пороговое значение переменности; и
компонент объезда помех, выполненный с возможностью определять маневр при вождении для транспортного средства на основе классификации по меньшей мере одного признака и предоставлять маневр при вождении на систему автоматизированного вождения/помощи при вождении для выполнения транспортным средством.
10. Система по п. 9, в которой классификация признака из одного или более признаков содержит классификацию первого признака, при этом компонент классификации также выполнен с возможностью классифицировать второй признак как соответствующий твердому объекту на основе параметров отслеживания.
11. Система по п. 10, в которой компонент классификации выполнен с возможностью классифицировать второй признак как соответствующий твердому объекту на основе одного или более из:
срока отслеживания, превышающего пороговое значение срока; согласованности обнаружения, превышающей пороговое значение согласованности; или
переменности позиции, опускающейся ниже порогового значения переменности.
12. Система по п. 9, в которой компонент параметров отслеживания выполнен с возможностью определять параметры отслеживания, содержащие одно или более из:
срока отслеживания, при этом компонент параметров отслеживания выполнен с возможностью определять срок отслеживания для характерного признака посредством определения того, как долго характерный признак отслеживается или обнаруживается;
согласованности обнаружения, при этом компонент параметров отслеживания выполнен с возможностью определять согласованность обнаружения для характерного признака посредством определения процента или отношения кадров, в которых признак обнаружен в период времени; или
переменности позиции, при этом компонент параметров отслеживания выполнен с возможностью определять переменность позиции для характерного признака посредством определения среднеквадратического отклонения для одного или более из позиции и ориентации характерного признака.
13. Система по п. 9, в которой компонент объезда помех также выполнен с возможностью определять то, следует или нет избегать удара о помеху, соответствующую признаку из одного или более признаков, на основе классификации признака.
14. Невременный машиночитаемый носитель хранения данных, хранящий инструкции, которые, при выполнении посредством одного или более процессоров, инструктируют одному или более процессоров:
обнаруживать и отслеживать один или более признаков в рамках данных дальности из одного или более датчиков;
рассчитывать параметры отслеживания для каждого из одного или более признаков, при этом параметры отслеживания содержат срок отслеживания и одно или более из согласованности обнаружения и переменности позиции; и
классифицировать по меньшей мере один признак из одного или более признаков как соответствующий листве на основе одного или более из срока отслеживания, опускающегося ниже порогового значения срока, согласованности обнаружения, опускающейся ниже порогового значения согласованности, или переменности позиции, превышающей пороговое значение переменности; и
определять маневр при вождении для транспортного средства на основе классификации по меньшей мере одного признака и предоставлять маневр при вождении на систему автоматизированного вождения/помощи при вождении для выполнения транспортным средством.
15. Невременный машиночитаемый носитель хранения данных по п. 14, в котором классификация признака из одного или более признаков содержит классификацию первого признака, при этом инструкции также инструктируют один или более процессоры классифицировать второй признак как соответствующий твердому объекту на основе параметров отслеживания.
16. Невременный машиночитаемый носитель хранения данных по п. 15, в котором инструкции инструктируют одному или более процессорам классифицировать второй признак как соответствующий твердому объекту на основе одного или более из:
срока отслеживания, превышающего пороговое значение срока; согласованности обнаружения, превышающей пороговое значение согласованности; или
переменности позиции, опускающейся ниже порогового значения переменности.
17. Невременный машиночитаемый носитель хранения данных по п. 14, в котором инструкции инструктируют одному или более процессорам определять параметры отслеживания посредством определения одного или более из:
срока отслеживания, при этом инструкции инструктируют одному или более процессорам определять срок отслеживания для характерного признака посредством определения того, как долго характерный признак отслеживается или обнаруживается;
согласованности обнаружения, при этом инструкции инструктируют одному или более процессорам определять согласованность обнаружения для характерного признака посредством определения процента или отношения кадров, в которых признак обнаружен в период времени; или
переменности позиции, при этом инструкции инструктируют одному или более процессорам определять переменность позиции для характерного признака посредством определения среднеквадратического отклонения для одного или более из позиции и ориентации характерного признака.
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| СПОСОБ ЛОКАЛИЗАЦИИ ДОРОЖНЫХ ЗНАКОВ И РАСПОЗНАВАНИЯ ИХ ГРУПП И ПОДГРУПП | 2012 |
|
RU2488164C1 |

