Перекрестная ссылка на родственную заявку
[0001] Эта заявка заявляет преимущество предварительной заявки США № 62/776,013, озаглавленной "VEHICLE DATA TRANSFER SYSTEM", зарегистрированной 6 декабря 2018 года, которая включена в данный документ по ссылке в своей полноте для всех целей.
Уровень техники
[0002] Настоящее изобретение относится, в целом, к передаче данных, а более конкретно, к системам для обеспечения широкополосной и имеющей короткое расстояние передачи данных транспортным средствам через систему динамической передачи в открытом пространстве ближнего радиуса действия.
[0003] В целом, транспортные средства являются объектами, используемыми для транспортировки людей и/или товаров. Поскольку транспортные средства становятся все более сложными, сложные зависимости данных могут существовать, чтобы обеспечивать растущий объем функциональных возможностей для транспортных средств. Например, один тип транспортного средства может быть автономным/частично автономным автомобилем, который является приспособленным для самостоятельного управления некоторыми функциями вождения, такими как изменение полосы движения, полностью автоматическое вождение на предусмотренное расстояние или т.п. Как может быть понятно, автономные функции могут быть очень зависимыми от данных, полагаясь на предоставление актуальных правил вождения и/или дорожных условий, чтобы обеспечивать их действия.
[0004] В другом примере аттракционы катания в стиле парка развлечений могут включать в себя транспортные средства для катания, которые перевозят пассажиров по маршруту поездки, например, определенному треком. В ходе поездки транспортные средства для катания могут иметь задачу выполнения различных эффектов, таких как активизация движения в кабине транспортного средства для катания, независимо от лежащей в основе транспортной системы транспортного средства для катания. Дополнительно, транспортные средства для катания могут иметь задачу инициирования представления освещения, звука, видео или т.п. и/или могут быть заняты другими действиями также, такими как предоставление интерактивных признаков, таких как электронные игры, и т.д. Как может быть понятно, эти функции транспортного средства для катания могут сильно полагаться на электронные данные, предоставленные транспортному средству для катания.
[0005] К несчастью, поскольку зависящие от данных функциональные возможности транспортных средств увеличиваются, объем данных, от которых транспортное средство зависит, может увеличиваться. Дополнительно, традиционные механизмы для предоставления данных этим транспортным средствам являются обременительными и занимающими время. Например, в системах, которые полагаются на проводные соединения (например, универсальную последовательную шину (USB) или другое физическое соединение) и/или машиночитаемый носитель (USB-накопители, цифровой универсальный диск (DVD) и т.д.), передачи данных могут требовать сложного роботизированного вмешательства и/или вмешательства человека, которое может быть довольно обременительным. Дополнительно, традиционные беспроводные технологии, используемые для передачи данных в ближнем радиусе действия (например, Wi-Fi, Bluetooth, и т.д.) могут не иметь достаточной пропускной способности для повышенных требований загрузки данных транспортных средств.
Краткое описание
[0006] Ниже обобщаются конкретные варианты осуществления, согласованные по объему с первоначально заявленным предметом изобретения. Эти варианты осуществления не предназначены, чтобы ограничивать рамки заявленного предмета изобретения, а скорее эти варианты осуществления предназначены лишь для того, чтобы предоставлять краткое изложение возможных форм предмета изобретения. В действительности, предмет изобретения может охватывать множество форм, которые могут быть аналогичны или отличаться от вариантов осуществления, изложенных ниже.
[0007] Чтобы обеспечивать широкополосную и имеющую малый радиус действия передачу данных транспортным средствам для катания, предоставляется динамическая система оптической связи в открытом пространстве (FSO) малого радиуса действия. Динамическая система FSO-связи малого радиуса действия, в частности, предназначается для использования в динамично перемещающихся целях, которые находятся в пределах короткого диапазона расстояний (например, 0-50 метров). С помощью специально предназначенных передатчиков и/или приемников динамическая система FSO-связи малого радиуса действия может обеспечивать широкополосную связь, в то же время предоставляя возможность нескольких вариантов настройки линии видимости, которые могут быть полезны для отчасти непрогнозируемого перемещения транспортного средства.
[0008] В варианте осуществления материальный, долговременный, машиночитаемый носитель включает в себя машиночитаемую инструкцию, которая, когда исполняется одним или более процессорами оптического передатчика в открытом пространстве (FSO) малого радиуса действия, инструктируют FSO-передатчику малого радиуса действия: идентифицировать позиционную информацию, относящуюся к FSO-приемнику. На основе позиционных данных передатчик может идентифицировать один или более параметров динамической передачи, применимых к позиции FSO-приемника, и обеспечивать FSO-передачу с помощью реализованных одного или более параметров динамической передачи.
[0009] В другом варианте осуществления динамический оптический передатчик в открытом пространстве (FSO) малого радиуса действия включает в себя: схему обнаружения радиуса действия, которая идентифицирует диапазон расстояний между FSO-передатчиком малого радиуса действия и целевым FSO-приемником. Схема регулировки передачи передатчика регулирует один или более параметров передачи на основе диапазона расстояний. Схема формирования передачи идентифицирует данные, которые должны быть переданы целевому FSO-приемнику, и формирует и передает FSO-передачу, представляющую данные, в соответствии с одним или более параметрами передачи.
[0010] В еще одном варианте осуществления динамический FSO-приемник малого радиуса действия включает в себя множество датчиков, каждый ориентирован в различных направлениях, предоставляя возможность приема оптической передачи в открытом пространстве (FSO) от FSO-передатчика малого радиуса действия из множества ориентаций. Приемник дополнительно включает в себя систему управления, которая принимает FSO-передачу от FSO-передатчика малого радиуса действия; и идентифицирует и хранит данные, представленные посредством FSO-передачи, на материальном, долговременном, машиночитаемом носителе, который соединяется с возможностью обмена данными с динамическим FSO-приемником малого радиуса действия.
Краткое описание чертежей
[0011] Эти и другие признаки, аспекты и преимущества настоящего изобретения станут лучше понятны, когда последующее подробное описание читается со ссылкой на сопровождающие чертежи, на которых аналогичные символы представляют аналогичные части на всех чертежах, причем:
[0012] Фиг. 1 - это схематичный чертеж, иллюстрирующий динамическую систему оптической передачи в открытом пространстве (FSO) малого радиуса действия, которая обеспечивает изменяющуюся передачу на основе изменяющегося местоположения FSO-приемника, в соответствии с вариантом осуществления настоящего изобретения;
[0013] Фиг. 2 - это схематичный чертеж системы аттракциона катания, который использует FSO-систему малого радиуса действия на фиг. 1, в соответствии с вариантом осуществления настоящего изобретения;
[0014] Фиг. 3A и 3B - это схематичные чертежи, иллюстрирующие конфигурации FSO-приемника малого радиуса действия, полезные для динамической FSO-передачи данных малого радиуса действия, в соответствии с вариантом осуществления настоящего изобретения;
[0015] Фиг. 4 - это схематичный чертеж, иллюстрирующий автомобильную систему, которая использует FSO-систему малого радиуса действия, в соответствии с вариантом осуществления настоящего изобретения;
[0016] Фиг. 5 - это схематичный чертеж головного устройства одного из автомобилей на фиг. 4, в соответствии с вариантом осуществления настоящего изобретения;
[0017] Фиг. 6 - это блок-схема последовательности операций, иллюстрирующая процесс для динамической передачи данных через динамический FSO-передатчик малого радиуса действия, в соответствии с вариантом осуществления настоящего изобретения;
[0018] Фиг. 7 - это блок-схема последовательности операций, иллюстрирующая процесс для динамической регулировки мощности динамического FSO-передатчика малого радиуса действия, в соответствии с вариантом осуществления настоящего изобретения; и
[0019] Фиг. 8 - это блок-схема последовательности операций, иллюстрирующая процесс для динамического ослабления динамического FSO-передатчика малого радиуса действия, в соответствии с вариантом осуществления настоящего изобретения.
Подробное описание изобретения
[0020] Ниже описываются один или более конкретных вариантов осуществления настоящего раскрытия сущности. Стремясь предоставить краткое описание этих вариантов осуществления, все признаки фактической реализации могут не быть описаны в спецификации. Следует принимать во внимание, что при разработке таких фактических реализаций, как и в любом инженерном или расчетном проекте, должно приниматься множество конкретных для реализации решений с тем, чтобы достигать конкретных целей разработчиков, таких как совместимость с системно-ориентированными и бизнес-ориентированными ограничениями, которые могут варьироваться в зависимости от реализации. Кроме того, следует принимать во внимание, что такие опытно-конструкторские работы могут быть комплексными и длительными, однако должны быть стандартной процедурой расчета, изготовления и производства для специалистов в данной области техники с использованием преимущества этого изобретения.
[0021] В то время как последующее обсуждение, в целом, предоставляется в контексте аттракционов катания в стиле парка развлечений, которые могут включать в себя множество систем барабанов с замкнутым контуром или разомкнутым контуром для приведения в движение тележки, которая может закреплять и размещать транспортное средство для катания, следует понимать, что варианты осуществления, описанные в данном документе, не ограничиваются такими развлекательными контекстами. Действительно, предоставление примеров и пояснений в таком развлекательном применении должно облегчать объяснение, предоставляя примеры реализаций и применений в реальном мире. По существу, следует понимать, что варианты осуществления, описанные в данном документе, могут быть полезны в других прикладных задачах, таких как системы перевозок (например, системы поездов, системы соединения зданий и этажей), системы элеваторов и/или другие промышленные, коммерческие и/или рекреационные системы транспортировки людей, и многие другие.
[0022] С учетом вышесказанного, настоящие варианты осуществления включают в себя системы и способы для передачи электронных данных транспортному средству по оптической связи в открытом пространстве (FSO) малого радиуса действия. В то время как только некоторые признаки раскрытых вариантов осуществления были иллюстрированы и описаны в данном документе, многие модификации и изменения придут на ум специалистам в области техники. Следовательно, должно быть понятно, что прилагаемая формула изобретения предназначена, чтобы охватывать все такие модификации и изменения, как подпадающие в рамки истинного духа изобретения.
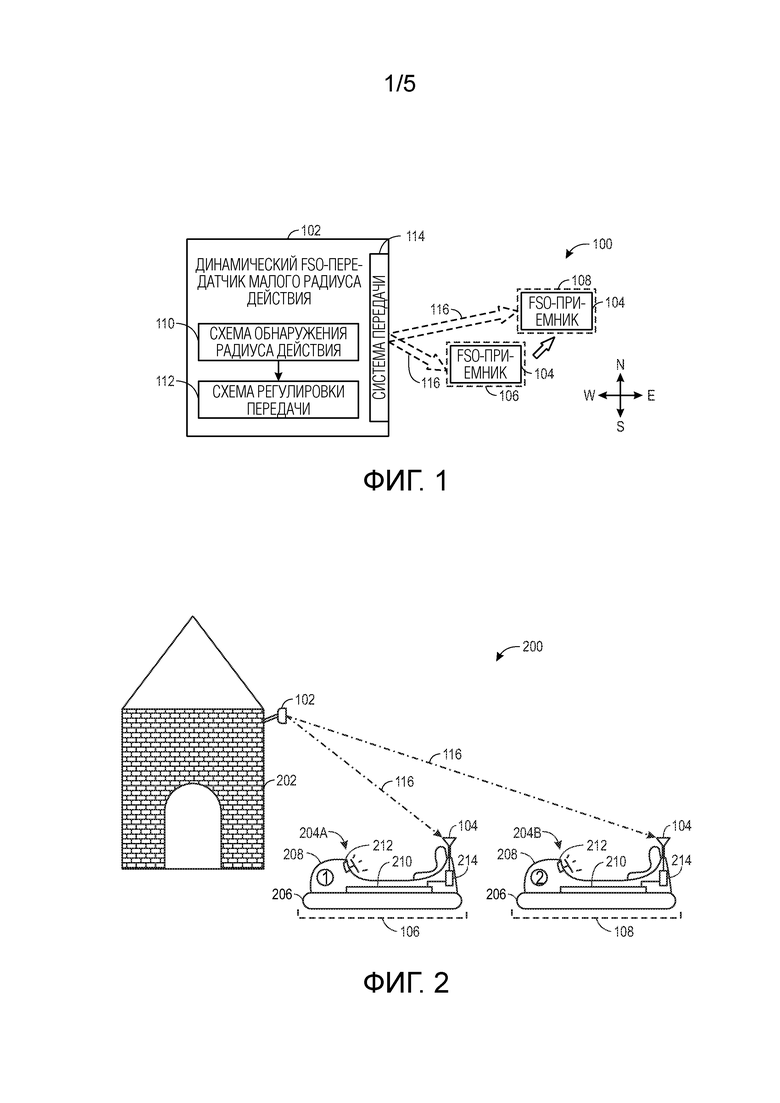
[0023] Обращаясь сначала к общему виду компонентов динамической FSO-системы малого радиуса действия, фиг. 1 является схематичным чертежом, иллюстрирующим динамическую систему 100 оптической передачи в открытом пространстве (FSO) малого радиуса действия, которая обеспечивает изменяющуюся передачу на основе изменяющегося местоположения FSO-приемника, в соответствии с вариантом осуществления настоящего изобретения. Динамическая FSO-система 100 малого радиуса действия включает в себя передатчик 102, который передает данные, предоставляя свет в прямой видимости приемнику 104 системы 100. Как иллюстрировано, приемник 104 может динамически изменять позицию (например, из позиции 106 в позицию 108). Например, как иллюстрировано, приемник 104 перемещается из позиции 106 с относительно более коротким расстоянием от передатчика 102 в позицию 108 с относительно большим расстоянием.
[0024] При FSO-передаче малого радиуса действия расстояние передачи является важным фактором. Когда приемник 104 находится слишком близко к передатчику 102, приемник может испытывать перенасыщение светом, которое вынуждает свет быть неподдающимся анализу в качестве передачи электронных данных. Наоборот, когда приемник 104 находится слишком далеко от передатчика 102, приемник 104 может не принимать достаточно света, чтобы интерпретировать свет как передачу электронных данных. Соответственно, передатчик 102 может смягчать эти проблемы с помощью включенной в него схемы 110 обнаружения радиуса действия и схемы 112 регулировки передачи.
[0025] Схема 110 обнаружения радиуса действия может обнаруживать диапазон цели от передачи электронных данных (например, приемника 104). Например, схема 110 обнаружения радиуса действия может включать в себя камеру и/или другую схему, которая обнаруживает расстояние и/или позиционное изменение между системой 114 передачи (например, излучателем света) передатчика 102 и приемника 104. Например, схема 110 обнаружения радиуса действия может обнаруживать позицию 106 и/или позицию 108, где приемник 104 позиционируется. Радиус действия и/или отклонение местоположения от системы 114 передачи могут быть вычислены и предоставлены для использования в схеме 112 регулировки передачи. Схема 112 регулировки передачи может регулировать характеристики передачи, обеспечиваемой системой 114 передачи, на основе определенного диапазона, идентифицированного схемой 110 обнаружения радиуса действия. Например, характеристики могут включать в себя предоставление мощности системе 114 передачи, величину вывода света из системы 114 передачи, позиционирование светового луча для излучаемого света, и т.д. В текущем варианте осуществления, в позиции 108, приемник 108 находится на относительно более дальнем расстоянии по сравнению с позицией 106. Соответственно, поскольку приемник 108 находится на более дальнем расстоянии в позиции 108, дополнительная интенсивность света может быть предоставлена системой 114 передачи. В некоторых вариантах осуществления она может быть предоставлена посредством увеличения величины мощности, вводимой в систему 114 передачи. В других вариантах осуществления интенсивность света может регулироваться независимо от мощности, предоставляемой системе 114 передачи.
[0026] Дополнительно и/или альтернативно, позиция луча передачи может также динамически изменяться. Например, в текущем варианте осуществления, когда приемник 104 находится в позиции 108, это является северным направлением для позиции 104. Система 114 передачи может направлять луч передачи 116 на основе позиции приемника 104. Таким образом, приемник, может направлять луч 116 света в северном направлении, когда приемник 104 находится в позиции 108. Наоборот, система передачи может направлять луч передачи в южном направлении, когда приемник 104 находится в позиции 106. Характеристики передачи могут быть отрегулированы во время передачи. Т.е., если приемник 104 перемещается во время предоставления луча 116 передачи, схема 112 регулировки передачи может динамически регулировать луч 116 передачи во время перемещения приемника 104.
[0027] Обращаясь теперь к конкретному варианту осуществления, фиг. 2 является схематичным чертежом системы 200 аттракциона катания, которая использует FSO-систему 100 малого радиуса действия на фиг. 1, в соответствии с вариантом осуществления настоящего изобретения. Как иллюстрировано, динамический FSO-передатчик 102 малого радиуса действия прикреплен к конструкции 202. Передатчик 102 имеет задачу передачи данных транспортного средства для катания посредством FSO-связи транспортным средствам 204A и 204B для катания. Каждое из транспортных средств 204A и 204B для катания включают в себя транспортную систему 206, которая обеспечивает перемещение транспортных средств 204A и 204B для катания. Транспортные средства 204A и 204B для катания также включают в себя кабину 208, где участник поездки размещается во время поездки. Кабина 208, в некоторых вариантах осуществления, может предоставлять отличительные признаки поездки, такие как движение кабины, через оборудование 210 для приведения в действие эффекта кабины, при инициирующих событиях. Например, при признаке землетрясения аттракциона катания, оборудование 210 для приведения в действие эффекта кабины может вынуждать кабину вибрировать или двигаться. Программирование (например, условия) для оборудования 210 приведения в действие эффекта кабины может быть принято динамическим FSO-приемником 104 короткого диапазона, которая принимает переданные данные через передачу 116 луча от передатчика 102. Например, данные, используемые для программирования оборудования 210 для приведения в действие эффекта кабины, могут быть предоставлены из передатчика 102 транспортным средствам 206A и 206B для катания посредством обеспечения передачи 16 светового луча приемникам 104.
Приемники 104 могут принимать передачу 116 луча и определять электронные данные, представленные посредством передачи 116 луча. Электронные данные могут быть сохранены в системе 214 управления транспортных средств 204A и 204B для катания, предоставляя возможность системе 214 управления самостоятельно устанавливать электронные данные. Самостоятельно установленные электронные данные могут определять конкретные условия для приведения в действие отличительных признаков оборудования 210 приведения в действие эффекта кабины, таких как обеспечение движения кабины, и т.д. В других вариантах осуществления передатчик 102 может быть осведомлен о конкретном транспортном средстве 204A и 204B для катания и/или движениях кабины 208, которые будут реализованы на основе оборудования 210 приведения в действие эффекта кабины. В таких вариантах осуществления передатчик может регулировать характеристики передачи на основе этих известных изменений. Например, передатчик 102 может быть осведомлен о том, что кабина 208 будет наклоняться влево на 5 градусов в некоторый момент времени, что может вызывать соответствующее перемещение приемника 104. Соответственно, передатчик 102 может заранее обеспечивать направление луча, чтобы учитывать перемещение кабины 208, на основе предварительно существующего знания перемещения кабины.
[0028] Другие данные могут быть предоставлены транспортным средствам 204A и 204B для катания. В некоторых вариантах осуществления интерактивный признак 212 (например, видеоигровая консоль/дисплей) позиционируется в транспортных средствах 204A и 204B для катания. Программирование интерактивного признака 212 может также быть обеспечено посредством передатчика 102. Например, когда интерактивный признак 212 является видеоигровой консолью/дисплеем, видеоигровые данные и/или сам код видеоигры могут быть предоставлены транспортным средствам 204A и 204B для катания через передатчик 102.
[0029] Поскольку FSO-связь является широкополосной (например, 1-10 Гбит/с), передача данных транспортного средства для катания может быть выполнена относительно быстрым образом посредством традиционных технологий беспроводной связи. Однако, как упомянуто выше, поскольку FSO-связь полагается на выстроенные пути прямой видимости между передатчиком 102 и приемником 104, передатчик может регулировать передачу, чтобы учитывать изменяющееся позиционирование транспортных средств 204A и 204B для катания, как обсуждается в данном документе. Посредством регулировки передачи передатчик 102 может обеспечивать качество FSO-передачи, несмотря на изменения в позиции транспортных средств для катания (например, позиция 106 в сравнении с позицией 108).
[0030] Фиг. 3A иллюстрирует первую конфигурацию 300 FSO-приемника 104 малого радиуса действия, полезную для динамической FSO-передачи данных малого радиуса действия, в соответствии с вариантом осуществления настоящего изобретения. Приемник 104 может быть прикреплен к транспортному средству, такому как транспортные средства 204A и 204B для катания на фиг. 2. В варианте осуществления на фиг. 3A отдельные датчики 302A, 302B, 302C, 302D и 302E, каждый, соединяются с возможностью передачи данных с программной системой 304 управления. Каждый из датчиков 302A, 302B, 302C, 302D и 302E включает в себя различную ориентацию, предоставляя возможность передатчику 102 контактировать с приемником 104 во множестве различных ориентаций, что может быть полезно для транспортных средств, которые могут динамически изменять ориентации время от времени. Датчики 302A, 302B, 302C и 302D ориентируются под углом, который будет предоставлять достаточный контакт луча 116 передачи от передатчика 102 с датчиками 302A, 302B, 302C и 302D. Датчик 302E ориентируется для использования, когда передатчик 102 находится сверху приемника 104. Любое число датчиков может быть использовано в приемнике 104. Например, меньшее количество датчиков может быть использовано в транспортных средствах, которые, как ожидается, должны находиться в ограниченном числе ориентаций (например, обращенной вперед, обращенной вбок, обращенной вверх или обращенной назад ориентации) во время нахождения в диапазоне передачи. В таком сценарии только датчики, которые вероятно должны принимать передачи от передатчика 102, могут присутствовать в приемнике 104, в то время как другие могут быть исключены из конфигурации 300.
[0031] Фиг. 3B иллюстрирует вторую конфигурацию 350 FSO-приемника малого радиуса действия, полезную для динамической FSO-передачи данных малого радиуса действия, в соответствии с вариантом осуществления настоящего изобретения. В этом варианте осуществления датчики 352A, 352B, 352C, 352D и 352E, все являются соединенными и являются частью общего приемника 104. Общий приемник 104 может быть расположен на фрагменте транспортного средства, который видим передатчиком 102 из всех желаемых ориентаций. Аналогично приемнику 104 на фиг. 3A, каждый из датчиков 352A, 352B, 352C, 352D и 352E включает в себя различную ориентацию, предоставляя возможность передатчику 102 контактировать с приемником 104 во множестве различных ориентаций, что может быть полезным для транспортных средств, которые могут динамически изменять ориентации время от времени. Датчики 352A, 352B, 352C и 352D ориентируются под углом, который будет обеспечивать достаточный контакт луча 116 передачи от передатчика 102 к датчикам 352A, 352B, 352C и 352D. Датчик 352E ориентируется для использования, когда передатчик 102 находится сверху приемника 104.
Любое число датчиков может быть использовано в приемнике 104. Например, меньшее количество датчиков может быть использовано в транспортных средствах, которые, как ожидается, должны находиться в ограниченном числе ориентаций (например, обращенной вперед, обращенной вбок, обращенной вверх или обращенной назад ориентации) во время нахождения в диапазоне передачи. В таком сценарии только датчики, которые вероятно должны принимать передачи от передатчика 102, могут присутствовать в приемнике 104, в то время как другие могут быть исключены из конфигурации 300. Как иллюстрировано на фиг. 3B, в отличие от датчиков на фиг. 3A, каждый из датчиков 352A, 352B, 352C, 352D и 352E является частью общего устройства 354 датчиков. В некоторых случаях может быть более легким размещать общее устройство 354 датчиков по сравнению с размещением отдельных датчиков, как сделано в вариантах осуществления на фиг. 3A.
[0032] Как упомянуто, динамическая FSO-передача малого радиуса действия может быть использована для передачи данных динамично перемещающимся целям. Для дальнейшего обсуждения, фиг. 4 является схематичным чертежом, иллюстрирующим автомобильную систему 400, которая использует FSO-передатчик 402 малого радиуса действия для передачи данных автомобилям 404A, 404B и 404C, в соответствии с вариантом осуществления настоящего изобретения. Как иллюстрировано, динамический FSO-передатчик 402 малого радиуса действия позиционируется на основании 406, которое предоставляет возможность передатчику иметь контакт по линии прямой видимости с динамическими FSO-приемниками 408A, 408B и 408C малого радиуса действия соответствующих автомобилей 404A, 404B и 404C. Как иллюстрировано, автомобиль 404A обращен назад, означая, что автомобиль 404A задним ходом занял предназначенное место (например, парковочное место). Вследствие позиционирования динамического FSO-передатчика 402 малого радиуса действия и/или приемника 408A передатчик 402 имеет возможность поддерживать прямую видимость с приемником 408A и, таким образом, имеет возможность обеспечивать передачу 410A данных. Автомобиль 404B обращен вперед, означая, что он въехал передом на предназначенное место (например, парковочное место). Дополнительно, приемник 408B позиционируется на передней стороне автомобиля 404B. Таким образом, передатчик 402 может предоставлять передаваемые данные 410B приемнику 408B. Как обсуждалось выше относительно фиг. 3A и 3B, в некоторых случаях, приемник может использовать множество датчиков. Например, транспортное средство 404C имеет приемник 408C, который использует обращенный вперед датчик 412 и обращенный назад датчик 414. В таких случаях, передатчик 402 может идентифицировать наиболее подходящий датчик из набора датчиков, используемого приемником 408C. Например, наиболее подходящий датчик может быть ближайшим датчиком к передатчику 402, датчиком, имеющим относительно наибольшую незагороженную площадь поверхности, и т.д.
В текущем варианте осуществления выбирается датчик 412, поскольку этот датчик является и наиболее близким к передатчику 402, и имеет наибольшую площадь поверхности, видимую передатчиком 402 для двух датчиков 412 и 414. Таким образом, передатчик может предоставлять передаваемые данные 410C датчику 412 приемника 408C.
[0033] Передатчик 402 может механически или иначе регулировать передающий луч. Например, моторы в передатчике 402 могут ориентировать источник луча на целевой датчик/приемник. В некоторых вариантах осуществления может существовать множество источников лучей. Множество источников лучей могут быть расположены по-разному и/или ориентированы по-разному (например, под разными углами). Передатчик 402 может выбирать один или более из множества источников лучей, наиболее подходящих для формирования луча, ориентированного на целевой датчик/приемник. Целевой приемник может быть идентифицирован посредством схемы 416 оптического распознавания (например, процессора и камеры) передатчика 402, которая распознает датчики/приемники транспортных средств. Дополнительно и/или альтернативно, передатчик 402 может включать в себя контроллер 418, который может быть соединен с возможностью обмена данными с одним или более транспортными средствами (например, автомобилем 408C), чтобы принимать, от одного или более транспортных средств, информацию, полезную для выбора целевого датчика/приемника. Например, автомобиль 408C может соединен с возможностью обмена данными с контроллером 418 по технологии беспроводной связи, такой как Bluetooth или Wi-Fi. Посредством этого коммуникационного соединения автомобиль 408C может предоставлять информацию, такую как позиционирование, ориентация и т.д. автомобиля 408C, предоставляющую возможность передатчику 402 выбирать датчик 412 для FSO-связи малого радиуса действия. В некоторых вариантах осуществления автомобиль 408C может просто предоставлять указание передатчику 402, идентифицирующее, что датчик 412 должен быть целью передатчика 402 для FSO-связи малого радиуса действия.
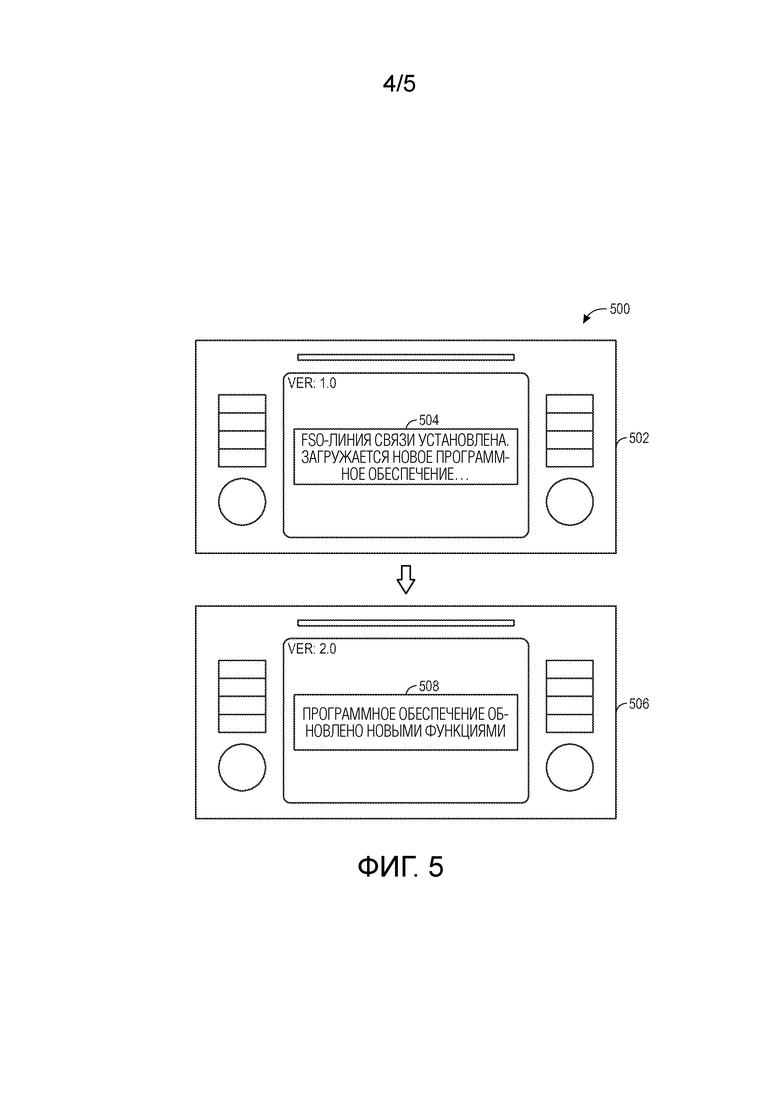
[0034] Обращаясь теперь к обсуждению данных, передаваемых посредством динамической FSO-связи малого радиуса действия, фиг. 5 является схематичным чертежом последовательности событий 500 головного устройства одного из автомобилей на фиг. 4, в соответствии с вариантом осуществления настоящего изобретения. Как упомянуто выше, множество различных типов данных может передаваться посредством FSO-связи малого радиуса действия. Например, в одном варианте осуществления, обновления программного обеспечения транспортного средства (например, микропрограммное обеспечение, карты системы глобального позиционирования и т.д.) могут передаваться транспортному средству, так что обновления программного обеспечения могут быть применены к вычислительным системам транспортного средства. В последовательности событий 500 головного устройства первая стадия 502 иллюстрирует уведомление 504, указывающее, что FSO-линия связи была установлена с передатчиком 402 на фиг. 4. Уведомление 504 также предоставляет указание того, что FSO-линия связи обеспечивает загрузку нового программного обеспечения. На второй стадии 506, после того как обновления программного обеспечения загружаются и применяются, новое уведомление 508 представляется, указывающее, что программное обеспечение было обновлено.
[0035] Фиг. 6 - это блок-схема последовательности операций, иллюстрирующая процесс 600 для динамической передачи данных через динамический FSO-передатчик малого радиуса действия, в соответствии с вариантом осуществления настоящего изобретения. Как упомянуто выше, местоположение FSO-приемника/датчика определяется (блок 602). Это может быть сделано с помощью схемы оптического распознавания и/или контроллера, как обсуждалось выше относительно фиг. 4. Например, схема оптического распознавания может использовать камеру и процессор для распознавания приемников для нацеливания. Приемники могут включать в себя специально идентифицирующие характерные черты, которые делают их относительно легко распознаваемыми. Например, приемники могут быть сильно отражающими и/или могут быть окрашены цветом, который может быть обнаружен схемой оптического распознавания. Дополнительно, в некоторых вариантах осуществления, контроллер может принимать данные (например, от самих транспортных средств), которые предоставляют данные, которые помогают в выборе целевых приемников. Например, явное указание местоположения отдельного приемника/датчика для нацеливания может быть предоставлено транспортным средством контроллеру.
[0036] После того как целевой приемник/датчик идентифицирован, параметры передачи, применимые к местоположению приемника, идентифицируются (блок 604). Например, в зависимости от диапазона между передатчиком и приемниками, изменение передачи может быть полезным. Как упомянуто выше, если передающий луч является слишком мощным, приемник может быть насыщен чрезмерно мощным лучом. Напротив, если передающий луч является слишком слабым, приемник может иметь трудность в интерпретации луча, чтобы получать результирующие данные, представленные посредством луча. Чтобы регулировать передающий луч, может быть применена регулировка мощности источника передачи и/или отдельный фильтр передачи. Эти регулировки могут калибровать передающий луч для конкретного местоположения/диапазона. Например, уменьшенная мощность источника передачи может приводить в результате к уменьшенным передающим лучам. Фиг. 7 - это блок-схема последовательности операций, иллюстрирующая процесс 700 для динамической регулировки мощности динамического FSO-передатчика малого радиуса действия, в соответствии с вариантом осуществления настоящего изобретения. Как упомянуто ранее, диапазон/расстояние между передатчиком и приемником идентифицируется (блок 702). На основе идентифицированного диапазона/расстояния определяется выбор регулировки мощности (блок 704). Например, таблица данных может быть проиндексирована на основе диапазона/расстояний. Дополнительные данные в таблице данных могут указывать конкретные настройки мощности источника передачи для использования для соответствующих диапазонов/расстояний. После того как выбор регулировки мощности определен, передача может быть отправлена, с помощью идентифицированной регулировки мощности (блок 706).
[0037] Возвращаясь к фиг. 6, в некоторых вариантах осуществления, фильтры могут ослаблять часть передающего луча, так что приемник, в определенном местоположении, не насыщается передающим лучом. Дополнительно и/или альтернативно, направление передающего луча может быть отрегулировано, чтобы направлять луч (например, под конкретным углом) для достижения приемника. Фиг. 8 - это блок-схема последовательности операций, иллюстрирующая процесс 800 для динамического ослабления динамического FSO-передатчика малого радиуса действия, в соответствии с вариантом осуществления настоящего изобретения. Как упомянуто выше, диапазон/расстояние между передатчиком и приемником идентифицируется (блок 802). На основе идентифицированного диапазона/расстояния определяется выбор регулировки ослабления (блок 804). Например, таблица данных может быть проиндексирована на основе диапазона/расстояний. Дополнительные данные в таблице данных могут указывать конкретные фильтры из множества доступных фильтров для использования для соответствующих диапазонов/расстояний. После того как выбор регулировки ослабления определен, передача может быть отправлена, с помощью идентифицированной регулировки ослабления (блок 806).
[0038] После того как параметры передачи идентифицированы, передатчик может формировать/модифицировать передачу на основе идентифицированных параметров (блок (606). Например, передатчик может регулировать мощность источника до идентифицированной величины, которая подходит для местоположения приемника относительно передатчика. В некоторых вариантах осуществления ослабляющий фильтр может быть выбран и применен к источнику передачи, чтобы изменять интенсивность передающего луча. Дополнительно, как упомянуто выше, направление передающего луча может быть применено, посредством выбора одного из множества источников с правильной ориентацией и/или через механическое срабатывание источника передающего луча и/или самого передающего луча.
[0039] После того как передатчик настраивается с помощью идентифицированных параметров, данные могут быть предоставлены приемнику посредством FSO-передачи малого радиуса действия от передатчика к приемнику (блок 608). Например, передатчик (или другой компонент) может формировать световой луч, представляющий данные, и предоставлять световой луч приемнику.
[0040] Как может быть оценено, текущие технические способы предоставляют большую пользу для передачи данных малого радиуса действия приемникам, которые не сохраняют неподвижную позицию. Посредством предоставления специализированной системы FSO-передачи и/или системы приемника высококачественная и широкополосная передача данных может быть обеспечена для нестационарных устройств, таких как транспортные средства. Посредством регулировки настройки передачи на основе характеристик приемника гораздо меньше ошибок передачи может испытываться во время передачи данных. Передающие потоки индивидуально настраиваются для конкретного приемника, и приемник сам обеспечивает их прием.
[0041] Технологии, представленные и сформулированные в данном документе, находятся по ссылке и применяются к материальным объектам и конкретным примерам практической природы, которые демонстративно улучшают настоящую техническую область и, по существу, не являются абстрактными, неосязаемыми или чисто теоретическими. Дополнительно, если какие-либо пункты формулы изобретения, добавленные в конец этого описания изобретения, содержат один или более элементов, обозначенных в качестве "средства для (выполн)ения (функции)..." или "этапа для (выполн)ения (функции)...", подразумевается, что такие элементы должны интерпретироваться в соответствии с 35 U.S.C. 112(f). Тем не менее, для любых пунктов формулы изобретения, содержащих элементы, обозначенные любым другим способом, подразумевается, что такие элементы не должны интерпретироваться в соответствии с 35 U.S.C. 112(f).



Изобретение относится к области беспроводной связи. Техническим результатом является обеспечение широкополосной и имеющей короткое расстояние передачи данных транспортным средствам, в то же время предоставляя возможность нескольких вариантов настройки линии видимости. Упомянутый технический результат достигается посредством специально предназначенных передатчиков и/или приемников в динамической системе 100 оптической связи в открытом пространстве (FSO) малого радиуса действия. Динамическая FSO-система 100 малого радиуса действия включает в себя передатчик 102, который передает данные, предоставляя свет в прямой видимости приемнику 104 системы 100. Приемник 104 может динамически изменять позицию (например, из позиции 106 в позицию 108). Схема 110 обнаружения радиуса действия может обнаруживать диапазон цели от передачи электронных данных (например, приемника 104), схема 112 регулировки передачи может регулировать характеристики передачи, обеспечиваемой системой 114 передачи, на основе определенного диапазона. При этом позиция луча передачи 116 может также динамически изменяться. 3 н. и 17 з.п. ф-лы, 9 ил.
1. Материальный долговременный машиночитаемый носитель, содержащий машиночитаемую инструкцию, которая, когда исполняется одним или более процессорами оптического передатчика в открытом пространстве (FSO) малого радиуса действия, инструктирует FSO-передатчику малого радиуса действия:
идентифицировать позиционную информацию, относящуюся к FSO-приемнику;
на основе позиционной информации идентифицировать один или более параметров динамической передачи, применимых к позиции FSO-приемника; и
обеспечивать FSO-передачу непосредственно в приемник FSO с использованием одного или более параметров динамической передачи, при этом FSO-передача содержит световой луч, передаваемый по линии прямой видимости в FSO-приемник, световой луч представляет электронные данные.
2. Машиночитаемый носитель по п. 1, содержащий инструкцию, которая, когда исполняется одним или более процессорами, инструктирует FSO-передатчику малого радиуса действия:
идентифицировать, в качестве позиционной информации, расстояние между FSO-передатчиком малого радиуса действия и FSO-приемником; и
идентифицировать один или более параметров динамической передачи на основе расстояния между FSO-передатчиком малого радиуса действия и FSO-приемником.
3. Машиночитаемый носитель по п. 2, содержащий инструкцию, которая, когда исполняется одним или более процессорами, инструктирует FSO-передатчику малого радиуса действия:
идентифицировать, в качестве одного или более параметров динамической передачи, уровень мощности источника передачи.
4. Машиночитаемый носитель по п. 2, содержащий инструкцию, которая, когда исполняется одним или более процессорами, инструктирует FSO-передатчику малого радиуса действия:
идентифицировать, в качестве одного или более параметров динамической передачи, конкретные один или более из множества ослабляющих фильтров для применения к FSO-передаче.
5. Машиночитаемый носитель по п. 1, содержащий инструкцию, которая, когда исполняется одним или более процессорами, инструктирует FSO-передатчику малого радиуса действия:
идентифицировать, в качестве одного или более параметров динамической передачи, конкретное направление луча для применения к FSO-передаче.
6. Машиночитаемый носитель по п. 1, содержащий инструкцию, которая, когда исполняется одним или более процессорами, инструктирует FSO-передатчику малого радиуса действия:
идентифицировать в качестве позиционной информации ориентацию FSO-приемника; а также
идентифицировать один или более параметров динамической передачи на основе ориентации FSO-приемника.
7. Машиночитаемый носитель по п. 1, содержащий инструкцию, которая, когда исполняется одним или более процессорами, инструктирует FSO-передатчику малого радиуса действия:
принимать, от транспортного средства, к которому FSO-приемник присоединен, ориентацию транспортного средства; и
идентифицировать ориентацию FSO-приемника на основе ориентации транспортного средства.
8. Машиночитаемый носитель по п. 1, содержащий инструкцию, которая, когда исполняется одним или более процессорами, инструктирует FSO-передатчику малого радиуса действия:
идентифицировать ориентацию транспортного средства, к которому FSO-приемник присоединен; и
идентифицировать ориентацию FSO-приемника на основе ориентации транспортного средства.
9. Машиночитаемый носитель по п. 1, содержащий инструкцию, которая, когда исполняется одним или более процессорами, инструктирует FSO-передатчику малого радиуса действия:
принимать ориентацию транспортного средства, к которому FSO-приемник присоединен; и
идентифицировать ориентацию FSO-приемника на основе ориентации транспортного средства.
10. Машиночитаемый носитель по п. 9, содержащий инструкцию, которая, когда исполняется одним или более процессорами, инструктирует FSO-передатчику малого радиуса действия:
принимать указание конкретного FSO-приемника из множества доступных FSO-приемников в качестве цели для обеспечения FSO-передачи, при этом конкретный FSO-приемник содержит FSO-приемник; и
выбирать FSO-приемник на основе указания.
11. Машиночитаемый носитель по п. 1, при этом:
электронные данные предоставляются транспортному средству;
транспортное средство содержит транспортное средство для катания аттракциона катания; и
электронные данные содержат:
командные данные, чтобы приводить в действие движение в кабине транспортного средства для катания, независимо от лежащей в основе транспортной системы транспортного средства для катания;
командные данные, чтобы обеспечивать представление освещения, звука, видео или т.п. из транспортного средства для катания; или
командные данные, чтобы обеспечивать представление интерактивных признаков; или
любое их сочетание.
12. Машиночитаемый носитель по п. 1, при этом:
электронные данные предоставляются транспортному средству;
транспортное средство содержит автомобиль; и
электронные данные содержат:
обновление микропрограммного обеспечения для автомобиля; или
обновление карты системы глобального позиционирования для автомобиля; или
любое их сочетание.
13. Машиночитаемый носитель по п. 1, при этом:
электронные данные предоставляются транспортному средству; и
электронные данные содержат:
командные данные для того, чтобы регулировать работу транспортного средства;
командные данные для того, чтобы регулировать транспортную функцию транспортного средства; или
любое их сочетание.
14. Динамический оптический передатчик в открытом пространстве (FSO) малого радиуса действия, содержащий:
схему обнаружения радиуса действия, сконфигурированную, чтобы идентифицировать диапазон расстояний между FSO-передатчиком малого радиуса действия и целевым FSO-приемником;
схему регулировки передачи, сконфигурированную, чтобы регулировать один или более параметров передачи на основе диапазона расстояний; и
схему формирования передачи, сконфигурированную, чтобы:
идентифицировать данные, которые должны передаваться в целевой FSO-приемник; и
формировать и передавать FSO-передачу, представляющую данные, непосредственно в целевой FSO-приемник по линии прямой видимости в соответствии с одним или более параметрами передачи, при этом FSO-передача содержит световой луч, представляющий электронные данные.
15. Динамический FSO-передатчик малого радиуса действия по п. 14, при этом схема регулировки передачи содержит:
схему регулировки мощности, сконфигурированную, чтобы регулировать величину мощности, предоставляемой схеме формирования передачи, на основе диапазона расстояний, так что FSO-передача имеет достаточную интенсивность, чтобы обеспечивать качественное представление данных, но не насыщая целевой FSO-приемник.
16. Динамический FSO-передатчик малого радиуса действия по п. 14, при этом схема регулировки передачи содержит:
схему регулировки ослабляющего фильтра, сконфигурированную, чтобы выбирать и применять ослабляющий фильтр к схеме формирования передачи, на основе диапазона расстояний, так что FSO-передача имеет достаточную интенсивность, чтобы обеспечивать качественное представление данных, но не насыщая целевой FSO-приемник.
17. Динамический FSO-передатчик малого радиуса действия по п. 14, при этом схема регулировки передачи содержит:
схему направления луча, сконфигурированную, чтобы регулировать ориентацию FSO-передачи.
18. Динамический FSO-передатчик малого радиуса действия по п. 17, при этом схема направления луча конфигурируется, чтобы выбирать один или более из множества источников FSO-передачи, что приведет в результате к ориентации.
19. Динамический FSO-приемник малого радиуса действия, содержащий:
множество датчиков, каждый ориентирован в различных направлениях, предоставляя возможность непосредственного приема оптической передачи в открытом пространстве (FSO) от FSO-передатчика малого радиуса действия по линии прямой видимости из множества ориентаций, при этом FSO-передача содержит световой луч, представляющий электронные данные; и
систему управления, сконфигурированную, чтобы:
принимать FSO-передачу от FSO-передатчика малого радиуса действия; и
идентифицировать и сохранять данные, представленные посредством FSO-передачи, на материальном долговременном машиночитаемом носителе, который соединяется с возможностью обмена данными с динамическим FSO-приемником малого радиуса действия.
20. Динамический FSO-приемник малого радиуса действия по п. 19, при этом множество датчиков формируются в унифицированное приемное устройство, которое поддерживается основанием.
| US 6525854 B1, 25.02.2003 | |||
| US 2016156420 A1, 02.06.2016 | |||
| US 2018088208 А1, 29.03.2018 | |||
| EP 3258624 A1, 20.12.2017 | |||
| ОПТИЧЕСКОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СООТВЕТСТВУЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2012 |
|
RU2600495C2 |

