Настоящее изобретение относится к медицинским диагностическим ультразвуковым системам и, в частности, к использованию сегментации сердечной камеры с одной степенью свободы.
Получение ультразвуковых изображений обычно используется для диагностики работы сердца посредством измерения таких параметров, как фракция выброса и минутный сердечный выброс. Такие измерения требуют, чтобы объем крови в сердечной камере в различных фазах сердечного цикла был очерчен в двух или трех изображениях сердечной камеры. Обычно измерения объема сердечных камер, таких как левый желудочек, осуществлялись пользователем вручную, вычерчивая контур эндокардиальной границы камеры. Такие контуры подвержены существенной изменчивости из-за различий в критериях, которые различные пользователи используют при определении, в каком месте должен располагаться контур. Были разработаны автоматические способы, чтобы попытаться автоматизировать такое создание контура границы, например, автоматизированная методология создания контура границы, описанная в патенте США 6,491,636 (Chenal и др.) В этой технологии определяют местоположение анатомических ориентиров камеры, в том числе, углы плоскости митрального клапана и угол при верхушке сердечной камеры. Одна из множества стандартных, проверенных экспертами эндокардиальных форм затем подгоняется к этим ориентирам. Автоматически нарисованная граница может затем корректироваться вручную способом "резиновой нити", с помощью которого пользователь перемещает контрольные точки по границе, чтобы скорректировать ее окончательное положение на эндокарде. Этот процесс выполняется для изображений, полученных в фазе конечной систолы сердца и в фазе конечной диастолы сердца. Две границы могут сравниваться или вычитаться, чтобы оценить фракцию выброса или минутный сердечный выброс. Например, патент США 2009/0136109 раскрывает, как определять объем толщины миокарда, сравнивая идентифицированную эндокардиальную границу (определяющую внутреннюю поверхность миокарда), и идентифицированную эпикардиальную границу (определяющую наружную поверхность миокарда). Объем толщины миокарда согласно патенту США 2009/0136109 является пустотелым, с полым пространством внутри объема, являющегося объемом камеры. Подобный подход описан в патенте EP 2434454 A2, в котором объем левого желудочка (LV) вычисляется на основе обнаруженных границ LV. Система в патенте EP 2434454 A2 использует различное машинное обучение для определения местоположения и создания контура сердечной стенки. Эти обучающие технологии основаны на тренировочном наборе данных, который использует базу данных известных способов, собранных для машинного обучения. Фракция выброса может быть оценена известными способами, такими как автоматизированный алгоритм Симпсона (правило дисков), чтобы измерить объем камеры, выбрасываемый при каждом сокращении сердца.
Но автоматизированные способы анализа изображения не всегда создают очертания камеры сердца, приемлемые для всех пользователей. Такое отсутствие успеха является следствием в значительной степени неспособности автоматических способов должным образом определить местоположение границы, где, как полагает любой конкретный пользователь, должна располагаться граница. Большинство таких плохих характеристик имеет место из-за вариаций между различными пользователями, на которых накладываются анатомические ориентиры, определяющие, где проходит истинная граница.
Задача настоящего изобретения состоит в предоставлении пользователям простого автоматизированного инструмента для очерчивания контура местоположения приемлемой границы сердечной камеры. Дополнительная задача состоит в том, чтобы такие очерчивания были стандартизированы и пригодны для сравнения и получения повторяемых результатов у разных пользователей. Такие результаты суммируют подход одного клинического врача в единое значение, которое может быть понятно и передаваться другим клиническим врачам, имеющим тот же самый инструмент.
Эти задачи решаются независимыми пунктами формулы изобретения. Предпочтительные варианты осуществления представлены в зависимых пунктах формулы изобретения.
В соответствии с принципами настоящего изобретения, описываются диагностическая ультразвуковая система и способ, диагностирующие работу сердца. При этом получают изображения сердечной камеры и изображение сегментируется, чтобы очертить контуром внутреннюю и внешнюю границы миокарда, или, альтернативно, нескольких (3 и более) границ миокарда. Предпочтительно это делается с помощью автоматизированного процессора анализа изображения, использующего, например, данные модели сердца. Обеспечивается средство управления пользователем, позволяющее пользователю определять предпочтительное местоположение границ камеры относительно одной, обеих или нескольких границ сегментации. Средство управления пользователя обеспечивает одно значение с одной степенью свободы, которое пользователь варьирует для определения истинного местоположения границы камеры, такое как процент расстояния относительно сегментированных границ. Одно значение может использоваться совместно с другими пользователями того же самого инструмента, позволяя другим пользователям получать те же самые результаты с другими изображениями, и, следовательно, добиваясь стандартизации идентификации границы сердечной камеры.
Краткое описание чертежей
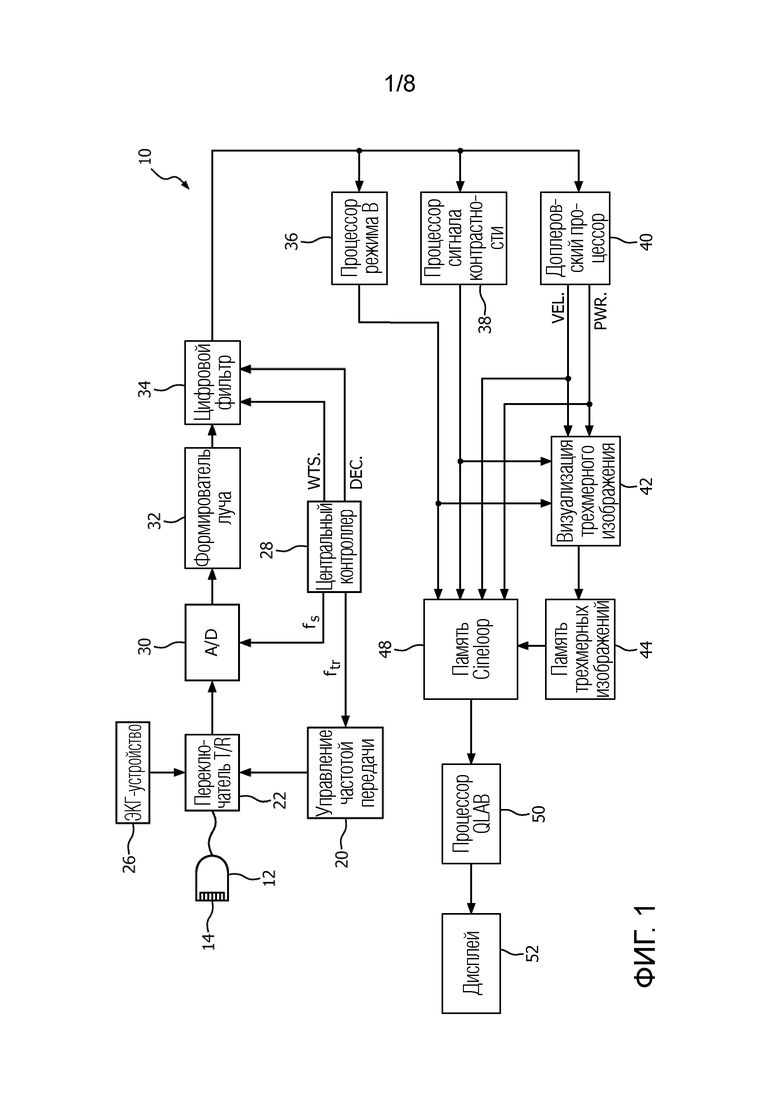
Фиг. 1 - блок-схема ультразвуковой диагностической системы получения изображения, выполненной в соответствии с принципами настоящего изобретения.
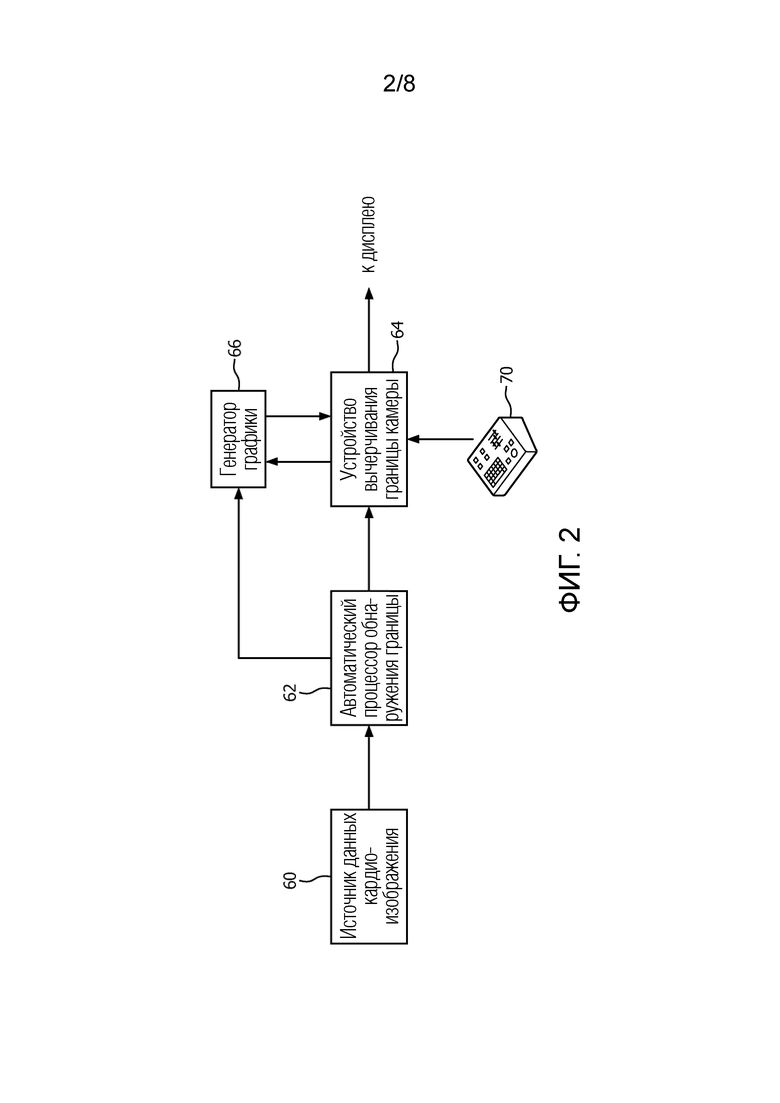
Фиг. 2 - блок-схема, поясняющая подробности процессора QLQB обнаружения границы, показанного на фиг. 1, соответствующего принципам настоящего изобретения.
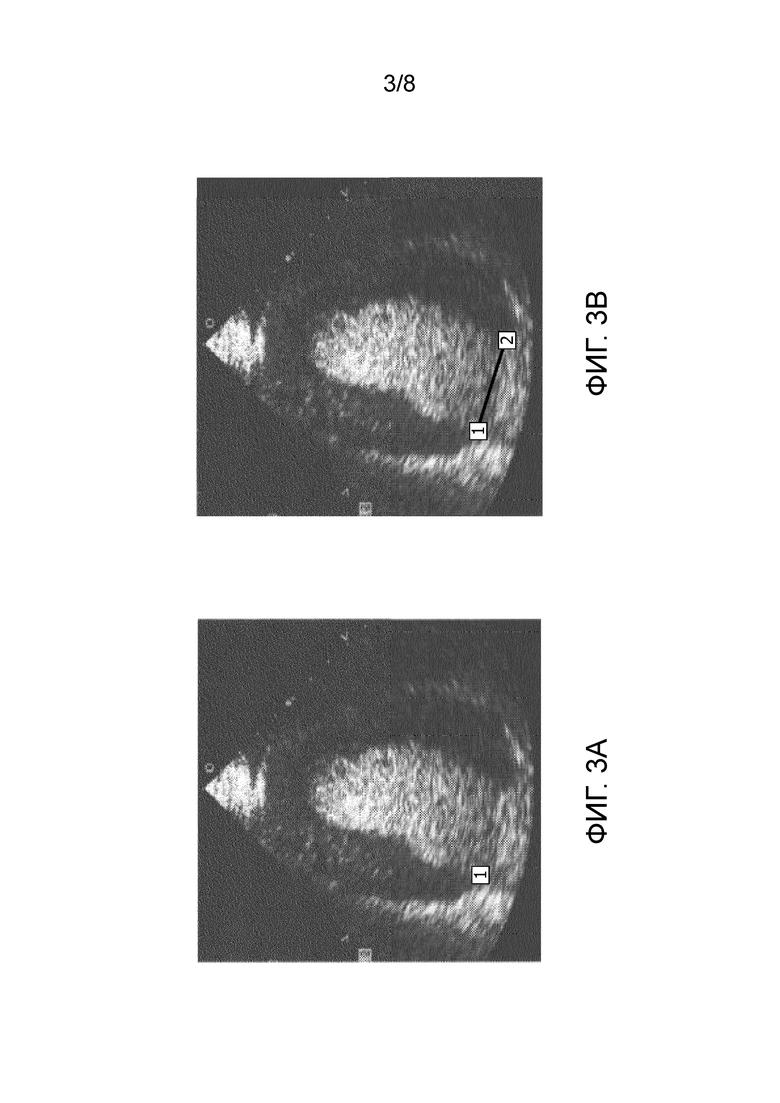
Фиг. 3a и 3b - ориентиры левого желудочка, полезные для обнаружения границ.
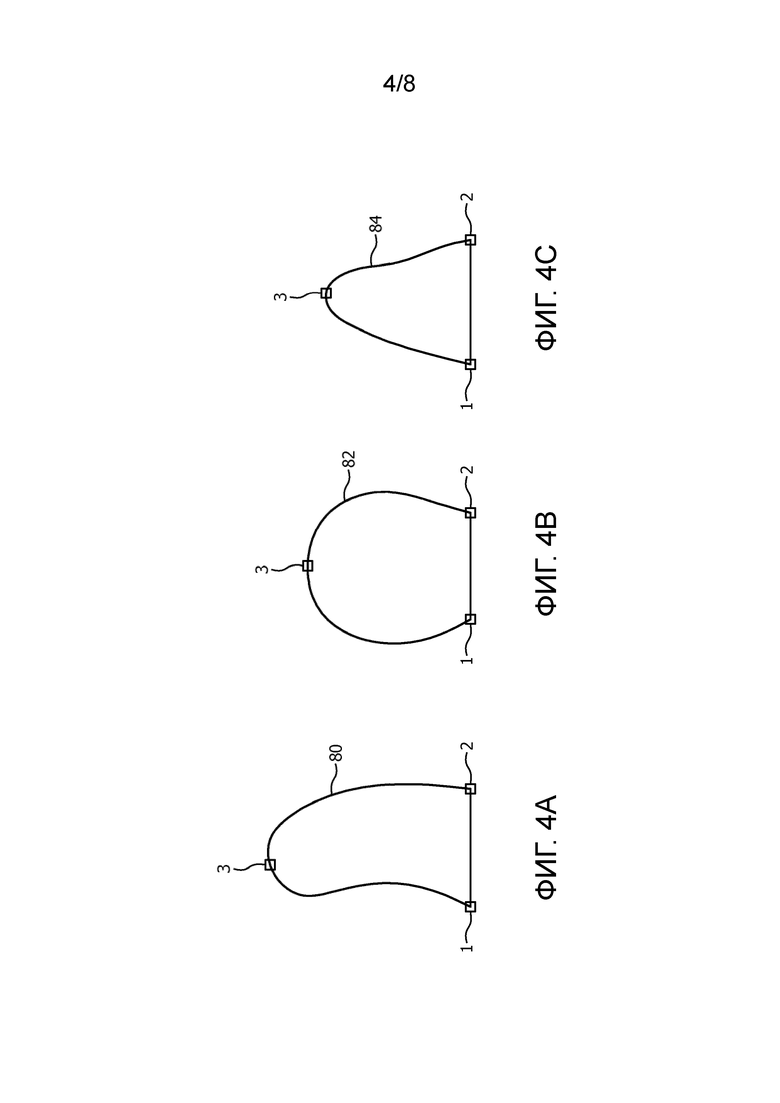
Фиг. 4a, 4b и 4c - полученные экспертами формы эндокардиальной границы, используемые для автоматизированного обнаружения границы.
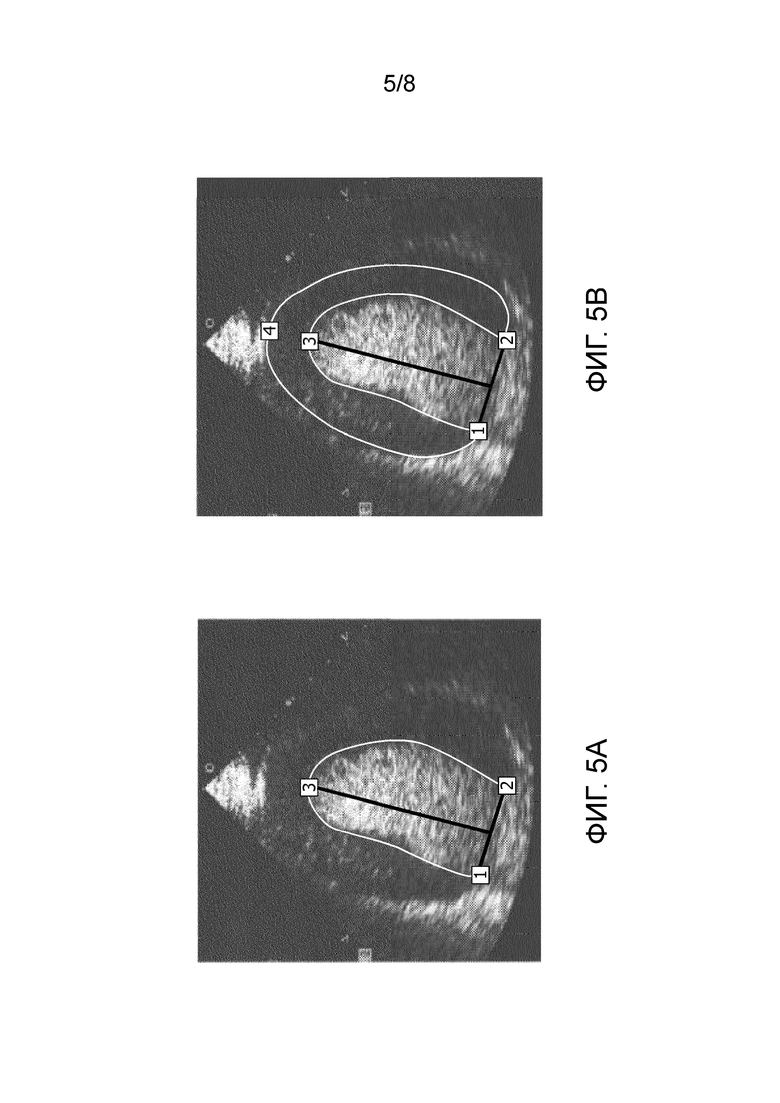
Фиг. 5a и 5b - контур эпикардиальной и эндокардиальной границ в изображениях левого желудочка.
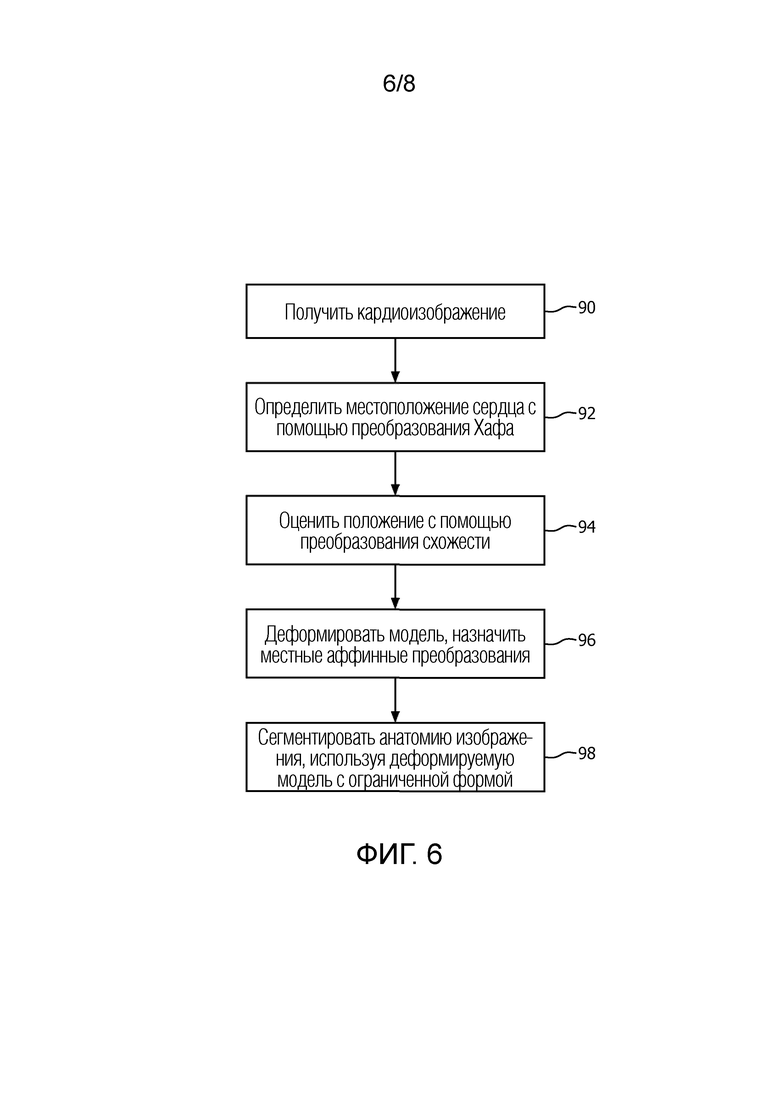
Фиг. 6 - блок-схема последовательности выполнения операций деформируемой модели сердца для обнаружения границ сердца в соответствии с настоящим изобретением.
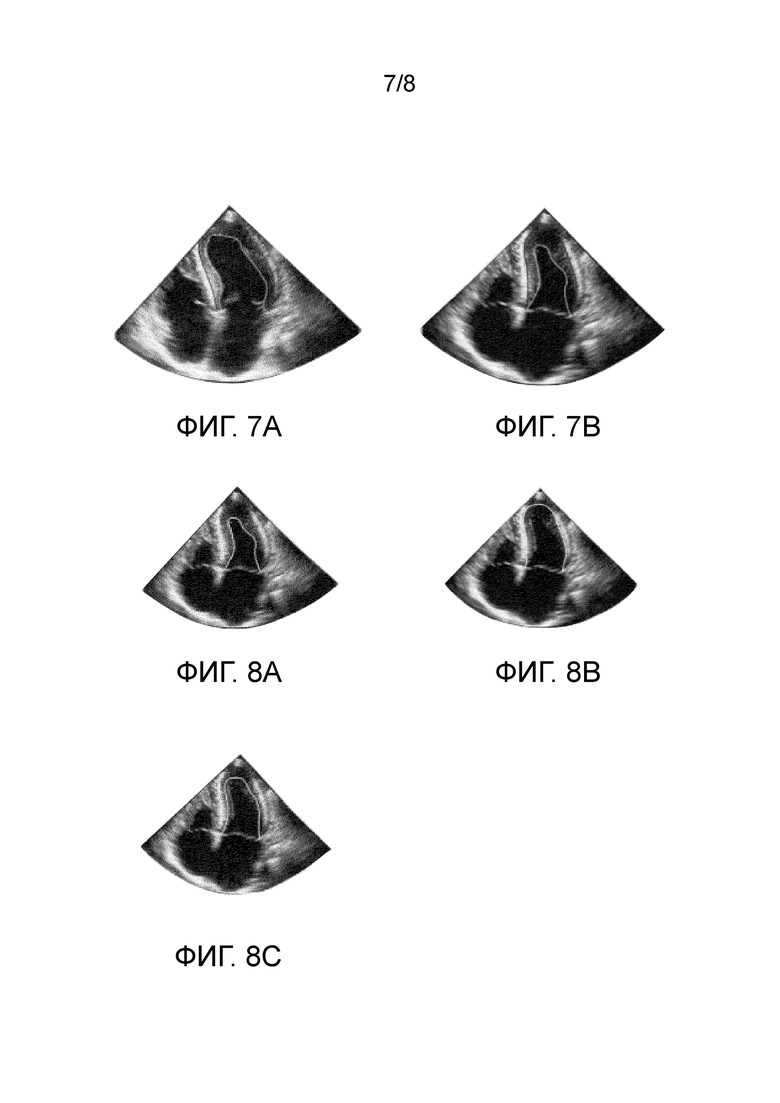
Фиг. 7a и 7b - кардиальные изображения левого желудочка в конечной диастоле и в конечной систоле, на которых нанесены контуры экдокардиальной границы и граница между трабекулярным миокардом и уплотненным миокардом.
Фиг. 8a и 8b - ультразвуковое изображение конечной систолы, показанное на фиг. 7b, на котором определенная пользователем граница была расположена на расстоянии 0% и 100% между двумя границами сердца, очерченными контуром на фиг. 7b.
Фиг. 8c - кардиальное изображение с определенной пользователем границей, расположенной на расстоянии 40% расстояния от эндокардиального контура в направлении границы уплотненного миокарда.
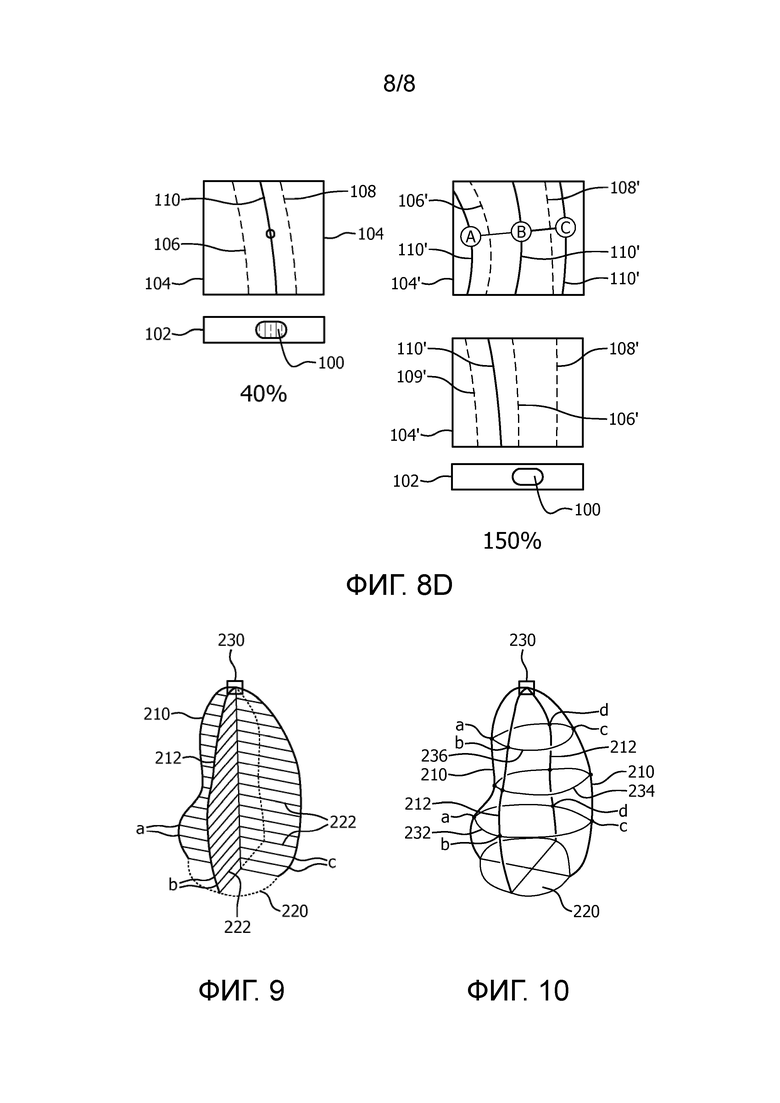
Фиг. 8d - средство управления пользователя с одной степенью свободы, соответствующее вариантам осуществления настоящего изобретения, в котором определенная пользователем граница устанавливается относительно нескольких границ миокарда.
Фиг. 9 - определенные пользователем камеры сердца, полученные из двумерных изображений, которые измеряются волюметрически, используя правило дисков.
Фиг. 10 - определенная пользователем каркасная модель камеры сердца, полученная из трехмерного ультразвукового изображения, подготовленного для волюметрического измерения.
На фиг. 1 представлена блок-схема ультразвуковой диагностической системы 10 получения изображений, выполненной в соответствии с принципами настоящего изобретения. Ультразвуковой зонд 12 содержит матрицу 14 ультразвуковых преобразователей, передающих и принимающих ультразвуковые импульсы. Матрица может быть одномерной линейной или изогнутой матрицей для получения двумерных изображений или может быть двумерной матрицей из элементов преобразователя для управления электронным лучом в трех измерениях. Ультразвуковые преобразователи в матрице 14 передают ультразвуковую энергию и принимают отраженные сигналы, возвращающиеся в ответ на эту передачу. Схема 20 управления частотой передачи управляет передачей ультразвуковой энергии на заданной частоте или в заданной полосе частот посредством переключателя 22 передачи/приема ("T/R"), связанного с ультразвуковыми преобразователями в матрице 14. Моменты времени, в которые матрица преобразователей активируется, чтобы передать сигналы, могут синхронизироваться с внутренней системой синхронизации (не показана) или могут синхронизироваться с функцией организма, такой как сердечный ритм, для чего форма сигнала сердечного цикла обеспечивается электрокардиографическим (ECG) устройством 26. Когда биение сердца находится в требуемой фазе сердечного цикла, что определяется по форме сигнала, обеспечиваемой ECG-устройством 26, на зонд подается команда получить ультразвуковое изображение. Это позволяет собрать данные, например, в фазе конечной диастолы и в фазе конечной систолы сердца. Частотой и шириной полосы ультразвуковой энергии, сформированными схемой 20 управления частотой передачи, управляет управляющий сигнал ftr, сформированный центральным контроллером 28.
Отраженные сигналы, полученные в результате переданной ультразвуковой энергии, принимаются преобразователями матрицы 14, формирующими отраженные сигналы, которые подключаются через переключатель 22 T/R и оцифровываются аналого-цифровыми преобразователями ("A/D") 30, когда система использует цифровой формирователь луча. Могут также использоваться аналоговые формирователи луча. A/D-преобразователи 30 делают выборку из принятых отраженных сигналов с частотой выборки, управляемой сигналом fs, формируемым центральным контроллером 28. Требуемая частота выборки, определяемая теорией выборки, равна, по меньшей мере, удвоенной наивысшей частоте принимаемой полосы пропускания, и может иметь значение порядка 30-40 МГц. Также желательны частоты выборки, превышающие минимально требуемые частоты выборки.
Выборки отраженного сигнала, полученные от индивидуальных преобразователей матрицы 14, задерживаются и суммируются формирователем 32 луча, чтобы сформировать когерентные отраженные сигналы. Для получения трехмерных изображений с помощью двумерной матрицы предпочтительно разделить формирователь луча на части, такие как микроформирователь луча, расположенный в зонде, и основной формирователь луча, расположенный в системном компьютере, как описано в патенте США 6,013,032 (Savord) и в патенте США 6,375,617 (Fraser). Цифровые когерентные отраженные сигналы затем фильтруются цифровым фильтром 34. В показанной ультразвуковой системе частота передачи и частота приемника управляются индивидуально так, чтобы формирователь 32 луча был свободен принимать полосу частот, отличную от полосы передачи, такой как полоса частот гармонического сигнала. Полоса частот цифрового фильтра 34 фильтрует сигналы и может также смещать полосу частот в диапазон более низких или видеочастот. Цифровой фильтр может быть фильтром типа, раскрытого, например, в патенте США № 5,833,613. Отфильтрованные сигналы, отраженные от ткани, с выхода цифрового фильтра 34 подаются на процессор 36 режима B для стандартной обработки изображений в режиме B.
Отфильтрованные сигналы, отраженные от контрастного агента, такого как микропузырьки, подаются на процессор 38 сигнала контрастности. Контрастные агенты часто используются для более четкого формирования контура эндокардиальной стенки по отношению к контрастному агенту в пуле крови сердечной камеры или для выполнения перфузионных исследований микроциркуляторной части сосудистого русла миокарда как описано, например, в патенте США 6,692,438. Процессор 38 сигнала контраста предпочтительно отделяет отраженные сигналы от гармонических контрастных агентов посредством технологии импульсной инверсии, при которой отраженные сигналы, полученные в результате передачи многочисленных, по-разному модулированных импульсов к месту расположения изображения, объединяются, чтобы удалить сигналы основной гармоники и усилить компоненты гармонических сигналов. Предпочтительная технология импульсной инверсии описывается, например, в патенте США 6,186,950.
Отфильтрованные отраженные сигналы с выхода цифрового фильтра 34 также подаются на доплеровский процессор 40 для стандартной доплеровской обработки, чтобы создать доплеровские сигналы скорости и мощности. Выходные сигналы этих процессоров могут отображаться как плоские изображения, а также подаваться на процессор 42 трехмерных изображений для визуализации трехмерных изображений, которые сохраняются в памяти 44 трехмерных изображений. Трехмерная визуализация может выполняться, как описано в патенте США 5,720,291 и в патентах США 5,474,073 и 5,485,842.
Сигналы от процессора 38 сигнала контрастности, процессора 36 режима B и доплеровского процессора 40 и сигналы трехмерного изображения из памяти 44 трехмерных изображений подаются в память 48 Cineloop®, которая хранит данные изображения для каждого из множества ультразвуковых изображений. Данные изображения предпочтительно хранятся в памяти 48 Cineloop в наборах, причем каждый набор данных изображения соответствует изображению, полученному в соответствующее время. Данные изображения в группе могут использоваться для отображения параметрического изображения, показывающего перфузию ткани в соответствующее время во время биения сердца. Группы данных изображения, хранящиеся в памяти 48 Cineloop, могут быть также сохранены в постоянном запоминающем устройстве, таком как дисковод или цифровой видеорекордер для последующего анализа. В этом варианте осуществления изображения также подаются на процессор 50 QLAB, где изображения анализируются, чтобы автоматически формировать контур границ сердца, позволяя пользователю затем расположить границу так, как пользователь считает необходимым, чтобы наиболее точно указать истинную границу камеры сердца. Процессор QLAB также проводит определенные количественные измерения различных вариантов анатомии в изображении и рисует контуры границ ткани посредством автоматизированного вычерчивания границ, как описано в патентной публикации США № 2005/0075567 и в публикации PCT № 2005/054898. Данные и изображения, созданные процессором QLAB, отображаются на дисплее 52.
На фиг. 2 показаны дополнительные подробности работы процессора QLAB по созданию контура определенной пользователем границы камеры сердца в соответствии с принципами настоящего изобретения. Ультразвуковое изображение сердца обеспечивается источником данных 60 изображения сердца, который может быть памятью Cineloop 48, памятью 44 трехмерных изображений или одним из процессоров 36, 38 или 40 изображения, показанных на фиг. 1. Кардиоизображение передается на процессор 62 автоматического обнаружения границ (ABD). Процессор ABD может быть полностью автоматическим или полуавтоматическим (действующим с помощью пользователя) процессором изображения, который создает контуры границы камеры в кардиоизображении, некоторые из которых описываются ниже. В типичной полуавтоматической системе ABD пользователь назначает первый ориентир в кардиоизображении с помощью указывающего устройства, такого как мышь или шаровой манипулятор, обычно располагающегося на пульте 70 управления ультразвуковой системы, или с помощью клавиатуры рабочей станции, манипулирующей курсором по изображению. В примере, показанном на фиг. 3а, например, первым назначенным ориентиром является срединное митральное кольцо (MMA) у основания левого желудочка (LV) на показанном чертеже. Когда пользователь щелкает по MMA в изображении, появляется графический маркер, такой как белая контрольная точка, обозначенная номером "1" на чертеже. Затем пользователь назначает второй ориентир, в этом примере, боковое митральное кольцо (LMA), которое обозначается второй белой контрольной точкой, обозначенной номером "2" на фиг. 3b. Линия, создаваемая процессором ABD, затем автоматически соединяет эти две контрольные точки, что в данном случае этой продольной проекции левого желудочка указывает плоскость митрального клапана. Пользователь затем перемещает указатель на эндокардиальную верхушку, являющуюся высшей точкой внутри левой желудочковой полости. По мере того, как пользователь перемещает указатель на этот третий ориентир в изображении, форма шаблона левой желудочковой эндокардиальной полости динамично следует за курсором, искажаясь и растягиваясь по мере того, как манипулируемый пользователем указатель ищет верхушку камеры LV, как показано на фиг. 5a. Этот шаблон, показанный белой линией на фиг. 5a, закрепляется первой и второй контрольными точками 1 и 2 и проходит через третью контрольную точку, расположенную на верхушке, когда пользователь щелкает указателем по верхушке, устанавливая третью контрольную точку 3. Типичные шаблоны границы LV-камеры показаны на фиг. 4a, 4b и 4c. Эти шаблоны определяются по многим экспертным контурам LV эндокардиальной границы у многих пациентов. Шаблон 80, показанный на фиг. 4a, является удлиненным шаблоном, типичным для многих обычных пациентов. Шаблон 82 на фиг. 4B является более выпуклым по форме, характерным для многих пациентов с застойной сердечной недостаточностью. Шаблон 84 является еще одним третьим вариантом, имеющим форму падающей слезинки. Шаблон, наилучшим образом подогнанный к трем анатомическим ориентирам, идентифицированным пользователем, выбирается процессором 62 ABD и искажается, чтобы быть подогнанным под три определяемых пользователем ориентира. Когда местоположение определено и подогнано к ориентирам, шаблон 80, 82 или 84 эндокардиальной полости обеспечивает приблизительную трассировку эндокарда левого желудочка, как показано на фиг. 5a. В примере на фиг. 5a черная линия, пересекающая левый желудочек, следует за указателем по мере того, как он приближается и определяет верхушку. Эта черная линия закрепляется между центром линии, указывающей плоскость митрального клапана, и левой желудочковой верхушкой, по существу, указывая осевую линию между центром митрального клапана и верхушкой полости.
Когда процессор 62 ABD находит эндокардиальную выстилку левого желудочка, он затем пытается обнаружить эпикардиальную границу. Это показано на фиг. 5b, где пользователь переместил курсор и щелкнул по верхушке 4 снаружи затемненного миокарда на изображении. Изображения на фиг. 5 являются контрастно усиленными гармоническими изображениями, на которых камера левого желудочка была заполнена контрастным агентом, но агент еще не полностью перфузировал в миокард, что является причиной, почему LV-камера кажется очень светлой относительно более темного окружающего миокарда на этом изображении. Когда пользователь щелкает по эпикардиальной верхушке, процессор ABD, как и раньше, выбирает внешний или эпикардиальный шаблон, подобный шаблонам, показанным на фиг. 4, и подгоняет его к эпикарду, как показано на фиг. 5b. Кардиальное изображение теперь имеет как его эпикардиальную границу (линия, соединяющаяся маркеры 1, 3 и 2), границу миокарда-пула крови, так и его эпикардиальную границу (линия, соединяющаяся маркеры 1, 4 и 2), наиболее удаленная поверхность сердца, очерченная на изображении посредством контуров, создаваемых генератором 66 графики.
Вместо полуавтоматической работы, требующей вмешательства пользователя, процессор ABD может создавать контур границы левого желудочка полностью автоматически, как описано в вышеупомянутом патенте США 6,491,636. Как объясняется в нем, процессор изображения может быть выполнен с возможностью обнаружения углов и верхушки митрального клапана автоматически, и затем подгонки шаблона к ориентирам с автоматически определенным местоположением. Однако, предпочтительной технологией автоматического очерчивания контуром миокардиальных границ является использование модели сердца, как показано на фиг. 6. Модель сердца является пространственно определенным математическим описанием структуры ткани типичного сердца, которое может быть подогнано к сердцу, как оно выглядит в диагностическом изображении, определяя, таким образом, конкретную анатомию отображаемого сердца. Процесс, показанный на фиг. 6, начинается с получения данных кардиоизображения на этапе 90. Затем, на этапе 92 в кардиоизображении, обрабатывая данные изображения с помощью обобщенного преобразования Хафа, определяется положение сердца. На этот момент расположение сердца не было определено, поэтому неточные совмещения при преобразовании, вращении и масштабировании сердца в данных изображения корректируются, используя на этапе 94 единое преобразование подобия для всей модели сердца. Затем, на этапе 96 модель деформируется и конкретным областям сердца назначаются аффинные преобразования. Ограничения на деформацию затем снижаются, позволяя на этапе 98 деформировать модель сердца относительно кусочно аффинного преобразования, и деформируемая модель с ограниченной формой изменяет размеры и деформируется так, что каждая часть модели подгоняется под фактическую анатомию пациента, как показано в изображении, в полученной фазе сердечного цикла. Модель, таким образом, точно адаптируется к границам органа, показанным на кардиоизображении, определяя, таким образом, границы, содержащие эндокардиальную выстилку, границу между трабекулярным миокардом и уплотненным миокардом и эпикардиальную границу. В предпочтительной реализации такой модели сердца сначала находят границу между трабекулярным миокардом и уплотненным миокардом, поскольку она обычно проявляется в ультразвуковом изображении как четко определенный градиент между ярко освещенной областью и областью умеренной освещенности. Эндокардиальная граница обычно менее четко определена в модели сердца из-за желания иметь возможность обнаруживать переменное местоположение менее четко определенной эндотелиальной выстилки, как она проявляется в ультразвуковом изображении. В отличие от контрастно улучшенных кардиальных изображений, показанных на фиг. 5a и 5b, неулучшенное ультразвуковое изображение, в целом, будет демонстрировать относительно резкий градиент интенсивности между тканью с относительно высокой интенсивностью отраженного сигнала, окружающей миокард, и средней интенсивностью миокарда, и относительно меньший градиент между миокардом и пулом крови камеры с низкой интенсивностью. Это делает обязательным различение сначала внешней миокардиальной границы, затем внутренней эндокардиальной границы при диагностировании изображений, полученных в отсутствии контрастного агента. Когда координаты границы найдены, они передаются генератору 66 графики, который формирует контуры, лежащие поверх изображения в расчетных положениях.
На фиг. 7 показаны два ультразвуковых изображения, одно с двумя границами миокарда, вычерченными в конечной диастоле (фиг. 7a), и второе с обеими миокардиальными границами, вычерченными в конечной систоле (фиг. 7b). На этих изображениях уплотненная миокардиальная граница показана черным цветом, а эндокардиальная граница показана белым цветом. С помощью обеих границ, показанных таким образом, пользователь управляет устройством 64 вычерчивания границы камеры с помощью средства управления пользователя на пульте 70 управления, чтобы указать местоположение между двумя контурами, где, как считает пользователь, располагается истинная граница камеры. В одной из реализаций пользователь управляет одним переменным средством управления, посредством которого пользователь может расположить истинную эндокардиальную границу в месте, смещенном на выбранный процент от расстояния между ранее вычерченной эндокардиальной границей и ранее вычерченной границей между трабекулярным миокардом и уплотненным миокардом. На фиг. 8a показано изображение конечной систолы, показанной на фиг. 7b, когда единое переменное управление устанавливается на 0%, и на фиг. 8b показано то же самое изображение с управлением пользователя, установленным на 100%, когда граница в виде белой линии располагается снаружи миокарда. Визуальное слежение за определенной пользователем границей также производится генератором 66 графики в системе, показанной на фиг. 1, для наложения поверх ультразвукового изображения. Установленная пользователем граница располагается в требуемом месте, как измеренная ортогонально по отношению к эндокардиальному контуру и на требуемом процентном расстоянии от расстояния между двумя границами. В этих примерах два контура миокардиальных границ не показаны для простоты иллюстрации, которая является одной из возможных реализаций, хотя автоматически вычерчиваемые контуры при желании также могут быть показаны.
На фиг. 8c показана ситуация, в которой пользователь отрегулировал установленную пользователем границу (показанную белой линией) так, чтобы она находилась на расстоянии 40% от расстояния между уплотненной границей миокарда и эндокардиальным контуром. Это делается, перемещая движок 100 влево или вправо в прорези 102. По мере перемещения движка пользователем, контур 110 управляемой пользователем границы перемещается туда или обратно между двумя границами миокарда. В примере, показанном на фиг. 8c, движок 100 показан в виде программного средства управления на экране дисплея, которым манипулируют с помощью мыши или другого средства управления пользователем, хотя движок альтернативно может быть физическим движком, ручкой или переключателем на стандартном пульте управления ультразвуковой системой. Управление пользователем может также быть реализовано в виде коромыслового регулятора, переключателей, окна списка или окна числовых вводов. Если пользователь имеет для большинства случаев предпочтительную установку процента, эта установка может быть сохранена как значение по умолчанию. В примере, показанном на фиг. 8c, числовое значение процента отображается на экране и изменяется по мере перемещения движка 100. Также, на фиг. 8d в увеличенном виде 104 показан участок идентифицированных миокардиальных границ. Пользователь щелкает по точке изображения миокарда слева и этот участок миокарда представляется в увеличенном виде 104 с манипулируемой пользователем границей 110 между миокардиальными границами 106 (внешняя граница) и 108 (внутренняя граница). По мере того, как пользователь манипулирует движком 100, граница 110 перемещается между двумя нарисованными системой границами 106 и 108.
Манипулируемая пользователем граница 110 может также быть установлена, используя диапазон более 100%, как показано на увеличенном виде 104ʹ. Определяемая пользователем позиция А (110ʹA) располагается за пределами границы 106ʹ уплотненного миокарда и выражается в диапазоне более 100%, в то время как определяемая пользователем позиция C (110ʹC) располагается внутри эндокардиального контура 108ʹ и выражается в отрицательном процентном диапазоне. Определяемая пользователем позиция B (110ʹB), расположенная между эндокардиальной и уплотненной границами миокарда, может быть выражена в диапазоне между 0% и 100%.
Альтернативно, для удобства пользователя манипулируемая пользователем (определенная) граница может перемещаться относительно трех контуров, как показано на фиг. 8d (вид 104ʹ ниже справа): граница 106ʹ уплотненного миокарда и эндокардиальная граница 108ʹ, которые соответствуют тем же самым 100% и 0%, соответственно, что и в предыдущем примере; и дополнительная граница 109ʹ, соответствующая значению 200%, где дополнительная граница 109ʹ располагается на эпикардиальной границе. В показанном примере движок 100 регулируется на значение 150%, соответствующее положению определенной пользователем границы 110ʹ между границей 106ʹ уплотненного миокарда и эпикардиальной границей 109ʹ. Альтернатива третьей границы относится к тому факту, что существует другая граница вне границы (106ʹ) уплотненного миокарда, которая является эпикардиальной границей (обозначенной в этом примере как дополнительная граница), причем упомянутая эпикардиальная граница может также характеризоваться заметным и обнаруживаемым градиентом в ультразвуковом изображении, которое может использоваться для ограничения перемещения движка с одной степенью свободы. Эта эпикардиальная граница может быть также идентифицирована процессором изображения границы. Движок является средством управления с одной степенью свободы. Пользователь устанавливает положение границы 110 в любом месте камеры, просто устанавливая одно значение, управляемое движком. Значение может быть сообщено другим пользователям, которые могут получать те же самые результаты, используя то же самое одно числовое значение.
На фиг. 9 и 10 показано, как границы камеры сердца, определенные пользователем в соответствии с настоящим изобретением, могут использоваться для измерения таких параметров, как минутный объем сердца и фракция выброса. На виде в перспективе, показанном на фиг. 9, две определенные пользователем границы 210 и 212 одновременно полученных двухплоскостных изображений левого желудочка показаны на основе 220, которая представляет плоскость митрального клапана. Маркер верхушки двух границ показан в точке 230. В этом примере плоскости изображения двух границ двумерного изображения ортогональны друг другу. Объем внутри двух границ 210 и 212 математически делится на разнесенные плоскости 222, параллельные основной плоскости 220. Эти плоскости, как показано на чертеже, пересекают левую сторону границы 210 в точках a, a, и, как показано на чертеже, пересекают правую сторону границы 210 в точках c, c. Как показано на чертеже, плоскости пересекают ближнюю сторону контура 212 в точках b, b.
Эллипс математически подгоняется к четырем точкам a, b, c, d пересечения каждой плоскости 222, как показано на фиг. 9. Хотя могут использоваться кривые или сплайны, отличные от эллипсов, в том числе, дуги и неправильные формы, преимуществом эллипса является то, что формула Симпсона была клинически проверена при практическом применении с эллипсами. Объем дисков, определенных плоскостями 222, и эллипсы могут быть вычислены по правилу дисков, чтобы оценить объем левого желудочка.
На фиг. 10 показана каркасная модель, созданная по определенным пользователем границам трехмерного изображения камеры сердца. Горизонтальные секции 232, 234, 236 каркаса являются границами, пересекающими вертикальные секции 210, 212 границы в точках a, b, c и d пересечения. Горизонтальные секции параллельны основе 220 плоскости митрального клапана. Объем внутри каркаса может быть определен по модифицированному правилу вычисления дисков или другим способом оценки объема. Когда объем, вычисленный, как показано на фиг. 9 или 10 для изображения фазы конечной систолы, вычитается из объема, вычисленного для изображения конечной диастолы, и делится на упомянутый объем, результатом является оценка фракции выброса.
Другие варианты вышесказанного с легкостью могут быть осуществлены специалистами в данной области техники. Вместо количественного определения процента, граница, определяемая пользователем, может располагаться на постепенно увеличивающемся расстоянии от проведенной вручную или автоматически границы. Движок может быть калиброван по расстоянию так, чтобы положение определяемой пользователем границы было определенным пользователем количеством миллиметров смещения, например, от эталонной границы. Вместо использования двух вычерченных границ, определяемая пользователем граница может быть установлена относительно одного контура границы или может находиться на интерполированном смещении от более чем двух границ. Определенная пользователем граница может также быть установлена, используя диапазон более 100%; она может быть расположена внутри эндокардиального контура или вне эпикардиальной границы или границы уплотненного миокарда.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЛЬТРАЗВУКОВАЯ ДИАГНОСТИКА РАБОТЫ СЕРДЦА С ИСПОЛЬЗОВАНИЕМ СЕГМЕНТАЦИИ МОДЕЛИ СЕРДЕЧНОЙ КАМЕРЫ ПОД КОНТРОЛЕМ ПОЛЬЗОВАТЕЛЯ | 2016 |
|
RU2708792C2 |
| КОЛИЧЕСТВЕННАЯ ОЦЕНКА И ОТОБРАЖЕНИЕ УТОЛЩЕНИЯ СТЕНКИ КАМЕРЫ СЕРДЦА | 2007 |
|
RU2448649C2 |
| УЛЬТРАЗВУКОВАЯ ОЦЕНКА СЕРДЕЧНОЙ СИНХРОННОСТИ И ЖИЗНЕСПОСОБНОСТИ | 2009 |
|
RU2508055C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОНТУРОВ МИОКАРДА ЛЕВОГО ПРЕДСЕРДИЯ НА МР-ИЗОБРАЖЕНИЯХ С ИСПОЛЬЗОВАНИЕМ МУЛЬТИПЛАНАРНЫХ РЕКОНСТРУКЦИЙ | 2015 |
|
RU2576816C1 |
| СИСТЕМА ДЛЯ КОМПЛЕКСНОГО СЛИЯНИЯ ДАННЫХ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ НА ОСНОВАНИИ СТАТИСТИЧЕСКИХ МОДЕЛЕЙ АНАТОМИИ | 2008 |
|
RU2472442C2 |
| СПОСОБ ОЦЕНКИ РЕГИОНАЛЬНЫХ УПРУГИХ СВОЙСТВ СТЕНКИ ПОЛОГО ОРГАНА | 2002 |
|
RU2217042C2 |
| УЛЬТРАЗВУКОВОЕ ПЛАНИРОВАНИЕ И НАВЕДЕНИЕ ИМПЛАНТИРУЕМЫХ МЕДИЦИНСКИХ УСТРОЙСТВ | 2010 |
|
RU2542378C2 |
| СПОСОБ ПРЕРЫВАНИЯ ФРОНТА ВОЛНЫ ВОЗБУЖДЕНИЯ ПО ПРЕДСЕРДИЯМ ВО ВРЕМЯ ОПЕРАЦИИ НА "СУХОМ" СЕРДЦЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2184505C2 |
| АНАЛИЗ МИТРАЛЬНОЙ РЕГУРГИТАЦИИ ИЗ ЩЕЛЕВЫХ ОТВЕРСТИЙ ПОСРЕДСТВОМ УЛЬТРАЗВУКОВОЙ ВИЗУАЛИЗАЦИИ | 2011 |
|
RU2596722C2 |
| СЕГМЕНТАЦИЯ ПРИ МР-ВИЗУАЛИЗАЦИИ СЕРДЦА В ПРОЕКЦИИ ПО ДЛИННОЙ ОСИ С ПОЗДНИМ УСИЛЕНИЕМ КОНТРАСТА | 2009 |
|
RU2522038C2 |
Изобретение относится к медицинской технике, а именно к ультразвуковой диагностической системе получения изображений для определения границы камеры сердца в ультразвуковом изображении. Система содержит источник данных кардиоизображения, процессор обнаружения границы, реагирующий на данные кардиоизображения и выполненный с возможностью идентификации, по меньшей мере, внутренней и внешней границ миокарда в данных кардиоизображения, средство управления пользователя, выполненное с возможностью разрешения пользователю указывать определяемую пользователем границу сердечной камеры относительно внутренней и внешней границ, и устройство вычерчивания границы камеры, связанное со средством управления пользователя и с процессором обнаружения границы, причем устройство вычерчивания границы выполнено с возможностью определения местоположения определяемой пользователем границы сердечной камеры в данных кардиоизображения относительно, по меньшей мере, одной из границ, идентифицированных процессором обнаружения границы, средство управления пользователя дополнительно выполнено с возможностью регулирования переменной с одной степенью свободы, калиброванной в виде процента, для определения местоположения определяемой пользователем границы сердечной камеры относительно внутренней границы, и при этом переменная с одной степенью свободы связывает смещение определяемой пользователем границы сердечной камеры относительно внутренней границы и расстояние от внешней границы до внутренней границы, причем смещение определяемой пользователем границы сердечной камеры относительно внутренней границы измеряется вдоль направления, ортогонального внутренней границе. Использование изобретения позволяет получить автоматизированный инструмент для очерчивания контура местоположения приемлемой границы сердечной камеры. 12 з.п. ф-лы, 10 ил.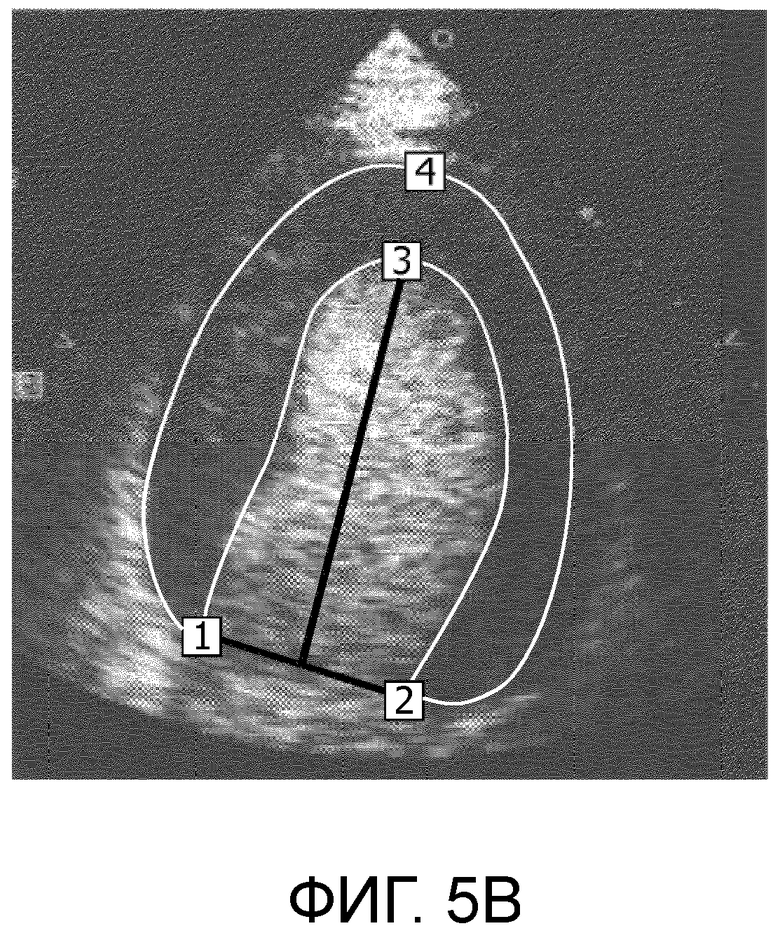
1. Ультразвуковая диагностическая система (10) получения изображений для определения границы камеры сердца в ультразвуковом изображении, содержащая:
источник данных (60) кардиоизображения;
процессор (62) обнаружения границы, реагирующий на данные кардиоизображения и выполненный с возможностью идентификации, по меньшей мере, внутренней (106) и внешней (108) границ миокарда в данных кардиоизображения;
средство управления пользователя, выполненное с возможностью разрешения пользователю указывать определяемую пользователем границу (110, 110', 110'') сердечной камеры относительно внутренней и внешней границ; и
устройство (64) вычерчивания границы камеры, связанное со средством управления пользователя и с процессором обнаружения границы, причем упомянутое устройство вычерчивания границы выполнено с возможностью определения местоположения определяемой пользователем границы сердечной камеры в данных кардиоизображения относительно, по меньшей мере, одной из границ, идентифицированных процессором обнаружения границы,
причем средство управления пользователя дополнительно выполнено с возможностью регулирования переменной с одной степенью свободы, калиброванной в виде процента, для определения местоположения определяемой пользователем границы сердечной камеры относительно внутренней границы, и при этом переменная с одной степенью свободы связывает смещение определяемой пользователем границы сердечной камеры относительно внутренней границы и расстояние от внешней границы до внутренней границы,
причем смещение определяемой пользователем границы сердечной камеры относительно внутренней границы измеряется вдоль направления, ортогонального внутренней границе.
2. Ультразвуковая диагностическая система получения изображений по п. 1, в которой процессор обнаружения границы выполнен с возможностью идентификации данных кардиоизображения границы эндокарда или пула крови-миокарда в качестве внутренней границы, и эпикарда или границы между трабекулированным миокардом и уплотненным миокардом в качестве внешней границы.
3. Ультразвуковая диагностическая система получения изображений по п. 1, в которой средство управления пользователя дополнительно содержит движок, ручку, переключатель, шаровой манипулятор, коромысловый переключатель, кнопки переключения, окно списка или окно с числовыми вводами.
4. Ультразвуковая диагностическая система получения изображений по п. 3, в которой средство управления пользователя дополнительно содержит программируемое средство управления или физическое средство управления.
5. Ультразвуковая диагностическая система получения изображений по п. 1, в которой источник данных кардиоизображения дополнительно содержит устройство памяти, содержащее двумерные или трехмерные кардиоизображения.
6. Ультразвуковая диагностическая система получения изображений по п. 5, в которой источник данных кардиоизображения выполнен с возможностью предоставления процессору обнаружения границы двумерных или трехмерных кардиоизображений, содержащих проекцию левого желудочка.
7. Ультразвуковая диагностическая система получения изображений по п. 1, в которой процессор обнаружения границы дополнительно содержит полуавтоматический процессор изображения границы сердца.
8. Ультразвуковая диагностическая система получения изображений по п. 7, в которой полуавтоматический процессор изображения границы сердца связан со средством управления пользователя и дополнительно реагирует на ввод пользователем данных, определяющих ориентир в кардиоизображении.
9. Ультразвуковая диагностическая система получения изображений по п. 1, в которой процессор обнаружения границы дополнительно содержит автоматический процессор изображения границы сердца.
10. Ультразвуковая диагностическая система получения изображений по п. 1, в которой автоматический процессор изображения границы сердца дополнительно выполнен с возможностью идентификации границы миокарда в данных кардиоизображения без ввода данных пользователем.
11. Ультразвуковая диагностическая система получения изображений по п. 1, дополнительно содержащая генератор (66) графики, связанный с процессором обнаружения границы, который выполнен с возможностью создания контуров для отображения внутренней и внешней границ миокарда; и
дисплей (52), связанный с источником данных кардиоизображения и с генератором графики, выполненный с возможностью отображения кардиоизображения с вычерченными контурами внутренней и внешней границ миокарда.
12. Ультразвуковая диагностическая система получения изображений по п. 1, дополнительно содержащая генератор (66) графики, связанный с устройством вычерчивания границы камеры, выполненным с возможностью создания контура для отображения определяемой пользователем границы камеры сердца; и
дисплей (52), связанный с источником данных кардиоизображения и с генератором графики, выполненный с возможностью отображения кардиоизображения с вычерченным пользователем контуром границы камеры сердца.
13. Ультразвуковая диагностическая система получения изображений по п. 1, в которой диапазон процентов переменной с одной степенью свободы составляет меньше 0%, больше 100%, например, 200%, или и то, и другое.
| US2009136109 A1, 28.05.2009 | |||
| US2004267125 A1, 30.12.2004 | |||
| Dias, J | |||
| M | |||
| B., et al, Wall position and thickness estimation from sequences of echocardiographic images | |||
| IEEE Transactions on Medical Imaging, 15(1), 1996, pp | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| СПОСОБ ДИАГНОСТИКИ ИШЕМИЧЕСКОЙ БОЛЕЗНИ СЕРДЦА МЕТОДОМ СТРЕСС-ЭХОКАРДИОГРАФИИ С КОМБИНИРОВАННОЙ ИЗОМЕТРИЧЕСКОЙ И ПСИХОЭМОЦИОНАЛЬНОЙ НАГРУЗКОЙ | 2013 |
|
RU2525510C1 |

