Изобретение относится к электротехнике, а конкретно к синхронным двигателям с возбуждением от постоянных магнитов, и может быть использовано в качестве компактного агрегата "двигатель-редуктор" для привода несущего винта вертолета.
Известно техническое решение по патенту РФ №2544835. Сущность заключается в том, что синхронный электродвигатель с магнитной редукцией содержит корпус, пакет статора с зубцами и с многофазной обмоткой, ротор быстрого вращения с постоянными магнитами на валу с подшипниками и многослойный ротор медленного вращения на валу с подшипниками. Ротор медленного вращения и статор имеют чередующиеся диски, состоящие из ферромагнитных и немагнитных элементов в виде секторов, постоянные магниты имеют вид секторов и намагничены аксиально с чередующейся полярностью, пакет статора выполнен в виде двух колец из ленты электротехнической стали путем навивки, расположенных по торцам электродвигателя, накладные зубцы с катушками и коронками установлены на торцевой поверхности кольца пакета статора, на поверхности другого кольца имеются клиновидные выступы, имеющие свои одинаковые угловые размеры и положения с ферромагнитными элементами дисков статора, причем количества ферромагнитных элементов на диске статора zc и на диске ротора zp связаны равенством zp=zc ± 2р, а угловые размеры ферромагнитных элементов дисков статора и ротора медленного вращения различны.
Недостатком является наличие двух валов, что усложняет конструкцию, а также отсутствие оптимального соотношения между толщиной постоянных магнитов и толщиной и количеством рабочих зазоров, что снижает энергетические показатели.
Известно техническое решение по патенту РФ №2604058. Сущность заключается в том, что синхронный электродвигатель с магнитной редукцией содержит корпус, магнитопровод статора с зубцами и с многофазной обмоткой, ротор быстрого вращения с постоянными магнитами и с подшипником, ротор медленного вращения на валу с подшипниками и статор имеют чередующиеся диски, диски статора и ротора медленного вращения состоят из ферромагнитных и немагнитных элементов в виде секторов, постоянные магниты имеют вид секторов и намагничены аксиально с чередующейся полярностью, магнитопровод статора выполнен в виде двух колец из ленты электротехнической стали путем навивки, расположенных по торцам электродвигателя, накладные зубцы с катушками и коронками установлены на торцевой поверхности первого кольца магнитопровода статора, причем количества ферромагнитных элементов на диске статора zc и на диске ротора zp связаны равенством zp=zc ± 2р, где р - число пар полюсов обмотки статора, а угловые размеры ферромагнитных элементов дисков статора и ротора медленного вращения различны, подшипник ротора быстрого вращения установлен на валу ротора медленного вращения а толщина постоянных магнитов hм на роторе быстрого вращения связана с толщиной и количеством рабочих зазоров соотношением hм=2mδ, где δ - зазор между дисками, m - число дисков ротора медленного вращения,
Недостатком является наличие осевого усилия на вал медленного вращения из-за несимметрии магнитной системы, большой поток рассеяния из-за большой МДС постоянного магнита и большого количества путей, а также трудность охлаждения из-за расположения обмотки с одного торца электродвигателя, что снижает энергетические показатели и надежность электродвигателя.
Наиболее близким техническим решением к заявленному техническому решению по наибольшему количеству совпадающих признаков и достигаемому техническому результату, выбранному заявителем в качестве прототипа, является изобретение по патенту РФ №2668817. Сущность заключается в том, что синхронный электродвигатель с магнитной редукцией содержит корпус, магни-топровод статора с зубцами и с многофазной обмоткой, ротор быстрого вращения с постоянными магнитами и с подшипником, ротор медленного вращения на валу с подшипниками и статор имеют чередующиеся диски, диски статора и ротора медленного вращения состоят из ферромагнитных и немагнитных элементов в виде секторов, постоянные магниты имеют вид секторов и намагничены аксиально с чередующейся полярностью, магнитопровод статора выполнен в виде двух колец из ленты электротехнической стали путем навивки, расположенных по торцам электродвигателя, накладные зубцы с катушками и коронками установлены на торцевых поверхностях первого, второго колец магнито-провода статора, на торцевых поверхностях коронок зубцов выполнены выступы, положение которых совпадает с ферромагнитными элементами дисков статора, причем количества ферромагнитных элементов на диске статора zc и на диске ротора zp связаны равенством zp=zc ± 2р, где р - число пар полюсов обмотки статора, а угловые размеры ферромагнитных элементов дисков статора и ротора медленного вращения различны, подшипник ротора быстрого вращения установлен посередине на валу ротора медленного вращения, а толщина постоянных магнитов hм на роторе быстрого вращения связана с толщиной и количеством рабочих зазоров соотношением hм=2mδ, где δ - зазор между дисками, m - число дисков ротора медленного вращения.
Недостатком является ограниченный выходной момент из-за малого числа ферромагнитных элементов на дисках статора и ротора, лимитированных внутренним диаметром активной части дисков, и низкие массо-габаритные показатели.
Технический результат, на достижение которого направлено заявленное изобретение, заключается в улучшении массо-габаритных показателей.
Технический результат достигается тем, что синхронный электродвигатель для винта вертолета, содержащий корпус, магнитопровод статора с зубцами и с многофазной обмоткой, ротор-индуктор с постоянными магнитами и с подшипником, ротор на валу с подшипниками и статор имеют чередующиеся диски, состоящие из ферромагнитных и немагнитных элементов в виде секторов, постоянные магниты имеют вид секторов и намагничены аксиально с чередующейся полярностью, магнитопровод статора выполнен в виде двух колец из ленты электротехнической стали путем навивки, расположенных по торцам электродвигателя, накладные зубцы с катушками и коронками установлены на торцевых поверхностях первого, второго колец магнитопровода статора, на торцевых поверхностях коронок зубцов выполнены выступы, положение которых совпадает с ферромагнитными элементами дисков статора, причем количества ферромагнитных элементов на диске статора zc и на диске ротора zp связаны равенством zp=zc ± 2р, где р - число пар полюсов обмотки статора, а угловые размеры ферромагнитных элементов дисков статора и ротора различны, подшипник ротора-индуктора установлен посередине на валу ротора, а толщина постоянных магнитов hм на роторе-индукторе связана с числом дисков ротора и длиной зазора соотношением hм=2mδ, где δ - зазор между дисками, m -число дисков ротора, ротор-индуктор и ротор имеют ступицы, а внутренний диаметр их активной части увеличен из условия минимума объема твердых частей электродвигателя при фиксированном моменте.
Заявленное техническое решение поясняется чертежами (фиг. 1 - фиг. 8):
- на фиг. 1 - показано продольное сечение синхронного электродвигателя;
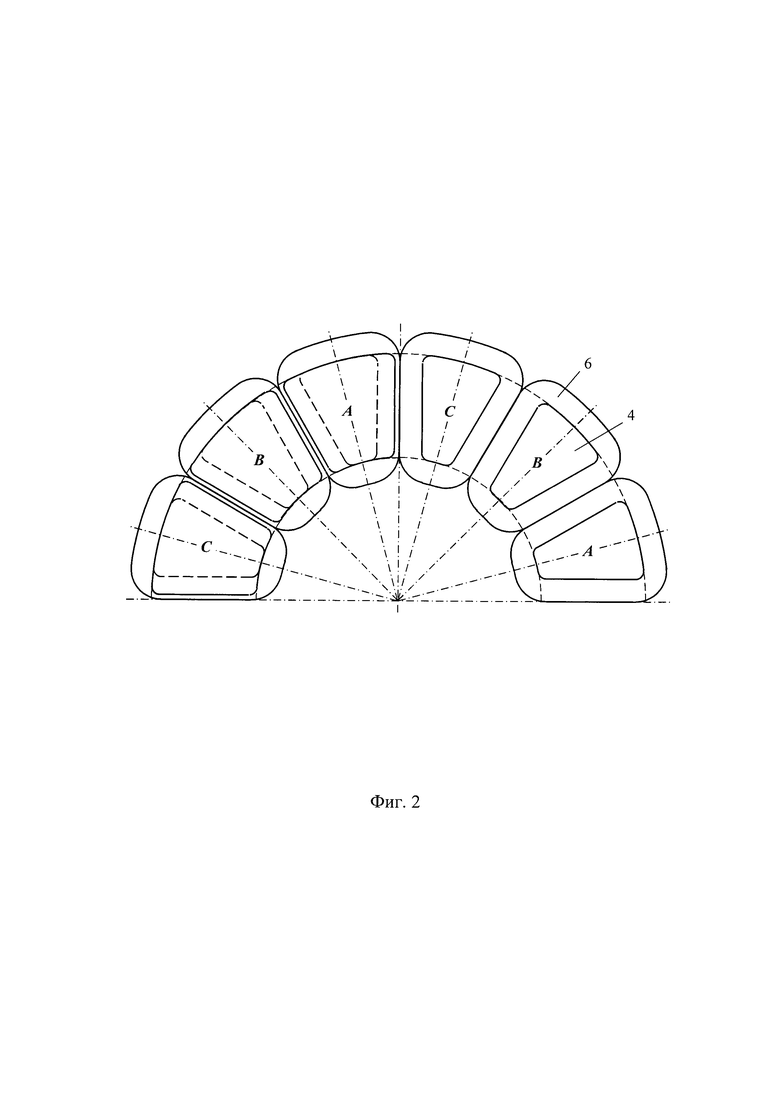
- на фиг. 2 - показан вид зубцов с катушками;
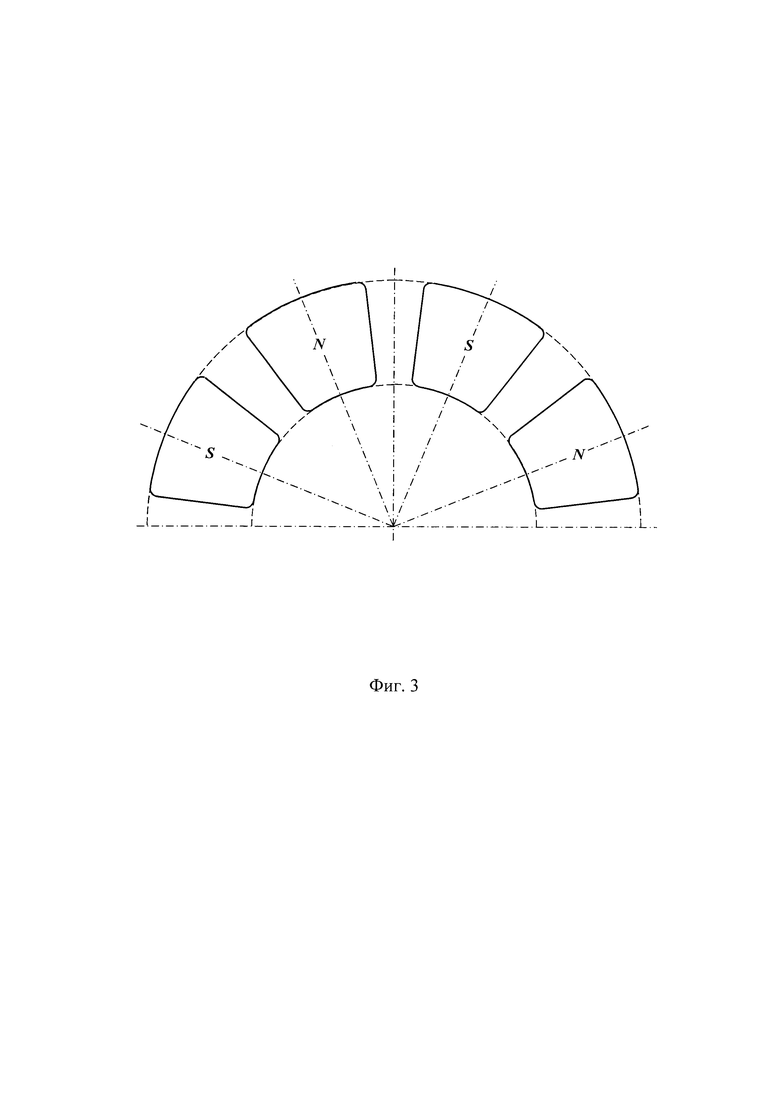
- на фиг. 3 - показан ротор-индуктор;
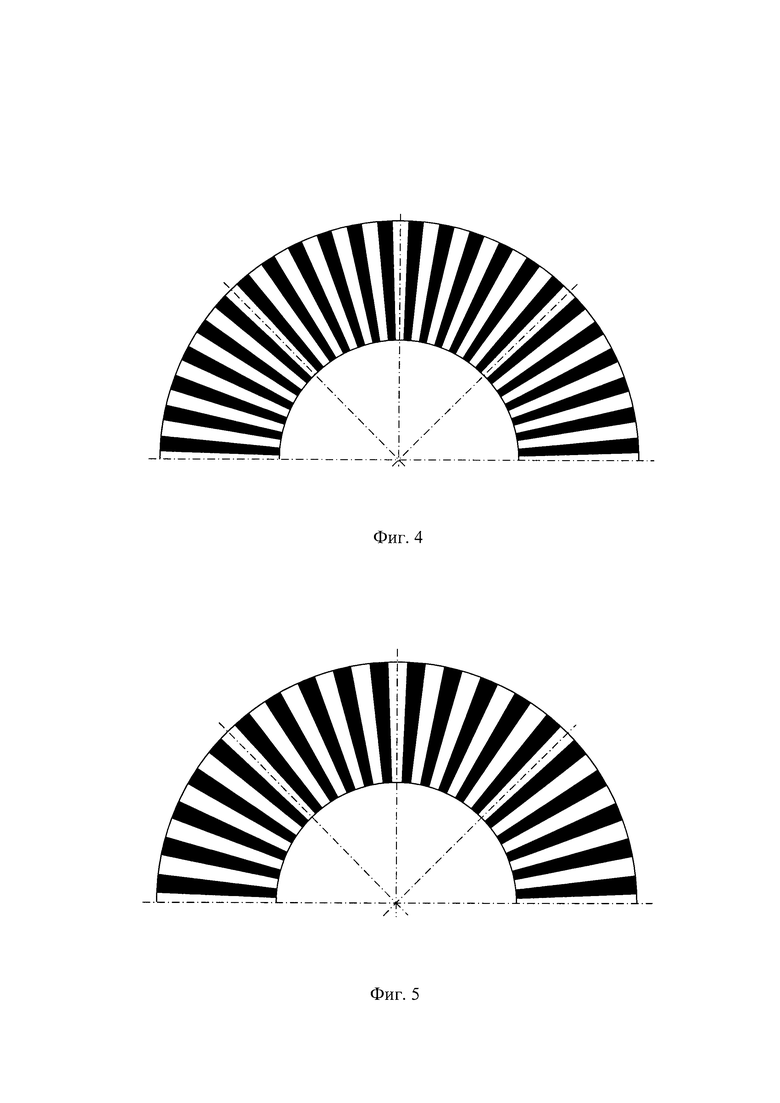
- на фиг. 4 - показан диск статора;
- на фиг. 5 - показан диск ротора;
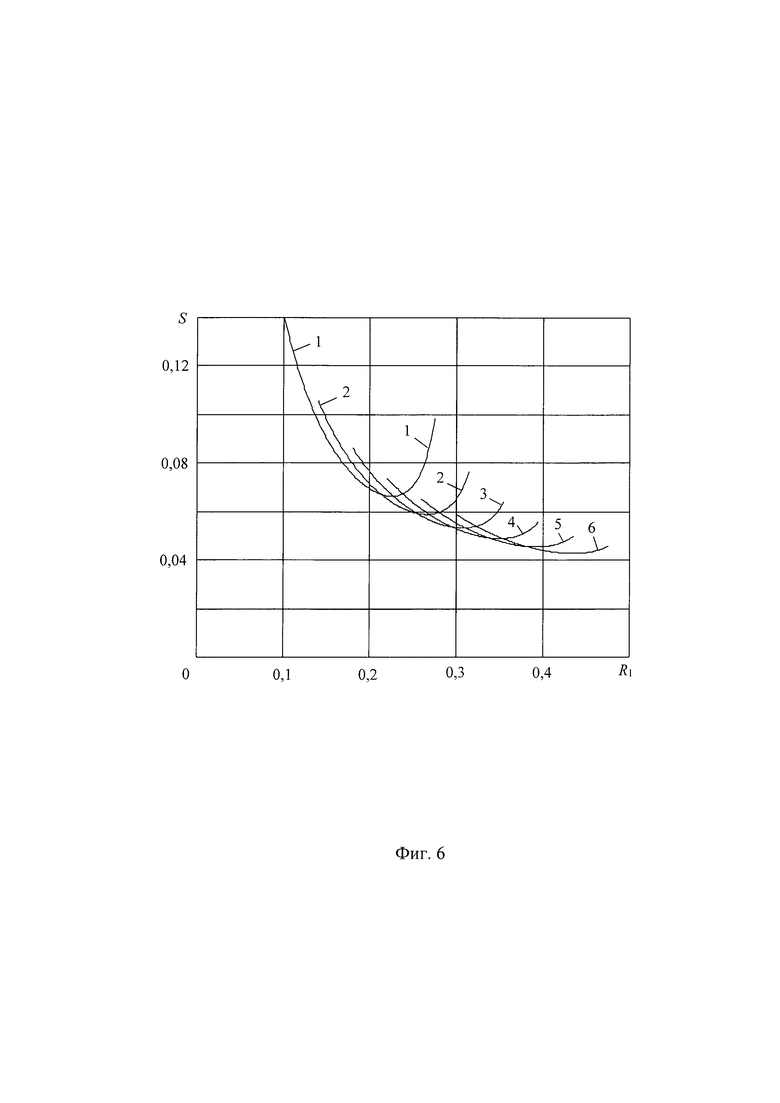
- на фиг. 6 - показаны законы S(R1) при 
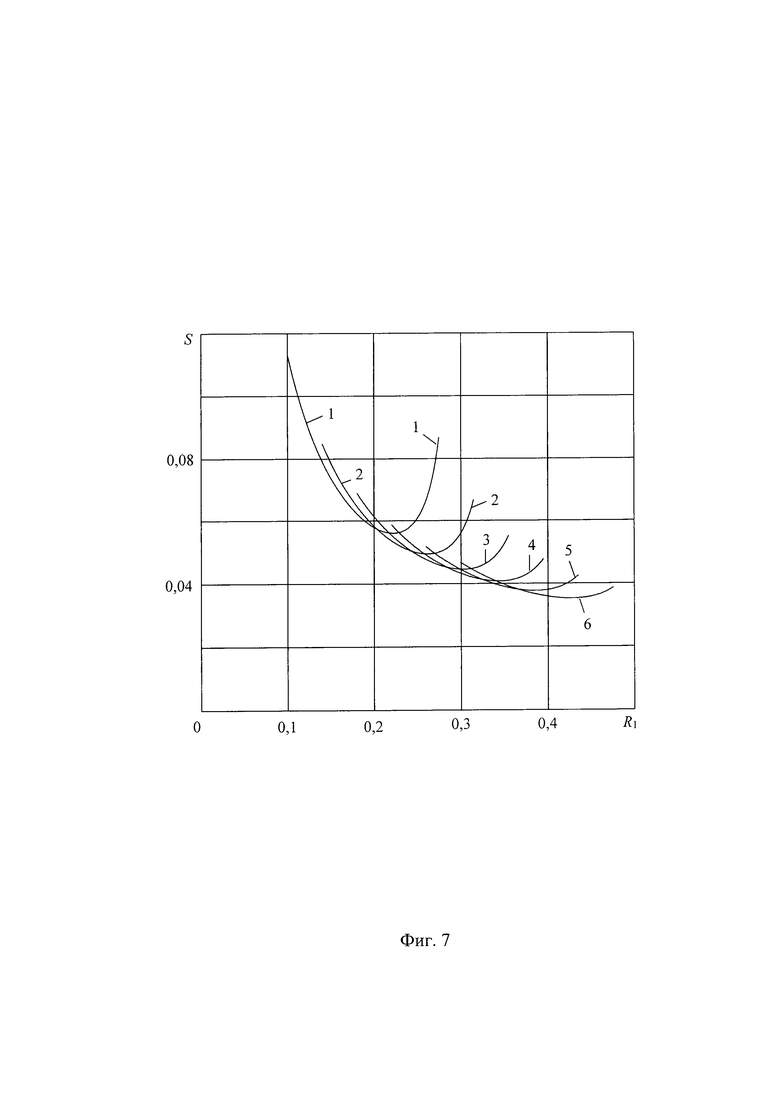
- на фиг. 7 - показаны законы S(R1) при 
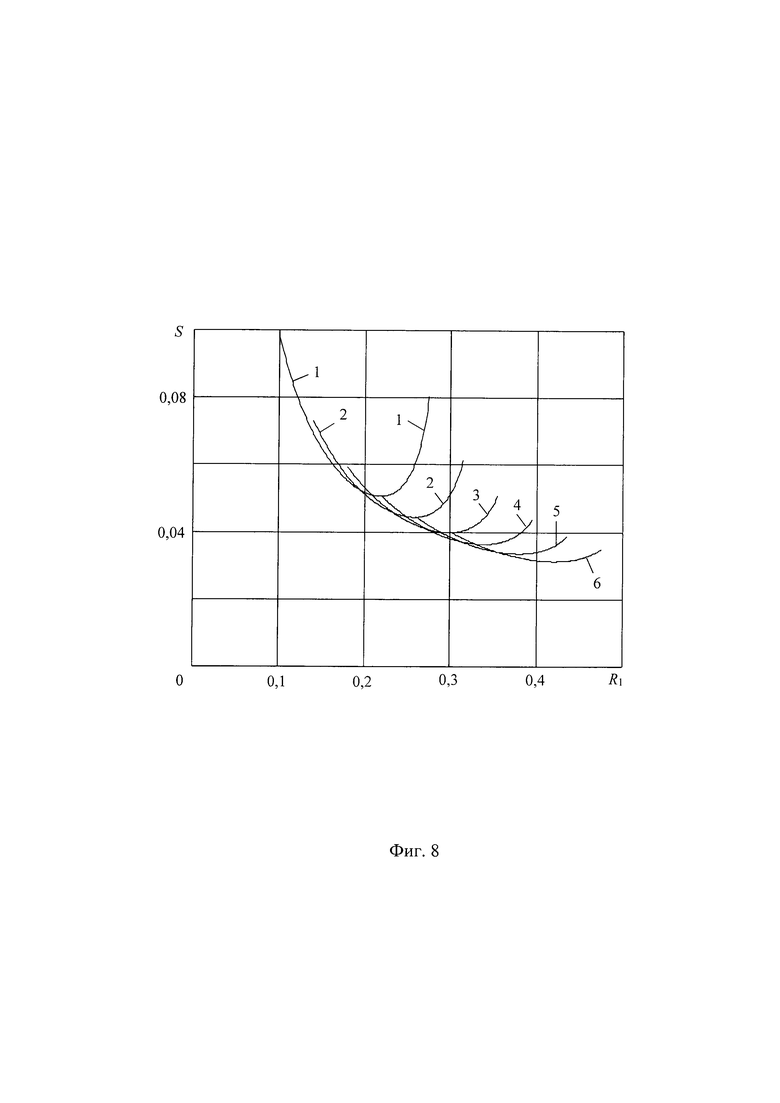
- на фиг. 8 - показаны законы S(R1) при 
Далее детально представлены конструктивные особенности признаков, приведенных на указанных фигурах.
На фиг. 1 представлен синхронный электродвигатель, где 1 - корпус; 2, 3 - подшипниковые щиты; 4, 5 - магнитопроводы статора с зубцами; 6, 7 - катушки; 8, 9 - втулки статора; 10, 11 - диски статора; 12, 13 - ступицы; 14, 15 - диски ротора; 16 - ступица ротора-индуктора; 17 - постоянный магнит; 18, 19 - подшипники ротора; 20 - подшипник ротора-индуктора; 21 - вал.
Заявленная конструкция собрана следующим образом. Корпус 1 жестко связан с подшипниковыми щитами 2, 3. На них установлены кольца 4, 5 магнитопровода статора. На кольце 4 имеются двенадцать зубцов с катушками 6. На кольце 5 имеются двенадцать зубцов с катушками 7.
Восемь постоянных магнитов 17 установлены на ступице 16 ротора-индуктора. Диски 10, 11 статора закреплены на втулках 8, 9 статора, установленных на корпусе 1. Диски 14, 15 ротора установлены на ступицах 12, 13, установленных на валу 21. Вал 21 опирается на подшипники 18, 19, установленные в подшипниковых щитах 2, 3. Ротор-индуктор установлен на подшипнике 20, установленном на валу 21. Подшипник 20 имеет большую ширину и является радиально-упорным для обеспечения требуемого положения ротора быстрого вращения.
Магнитопроводы 4, 5 статора выполнены лентой из электротехнической стали путем навивки. Зубцы с коронками имеют вид секторов (фиг. 2). Катушки намотаны вокруг зубцов. Катушки, расположенные под углом π/2, соединены последовательно встречно и образуют три фазы обмотки статора: А, В и С.
Ротор-индуктор имеет восемь постоянных магнитов 17 из высококоэрцитивного магнитотвердого материала, имеющие вид секторов (на фиг. 3 показаны закрашенными), и немагнитные сектора (на фиг. 3 не закрашены). Сектора намагничены по оси вращения и образуют на торцевых поверхностях чередующиеся полюса.
Диски 10, 11 статора имеют чередующиеся секторы из магнитомягкого материала (на фиг. 4 показаны темными) и немагнитного материала (на фиг. 4 светлые). Магнитные элементы выполнены шихтованными из электротехнической стали.
Диски 14, 15 ротора имеют чередующиеся секторы из магнитомягкого материала (на фиг. 5 показаны темными) и немагнитного материала (на фиг. 5 светлые). Магнитные элементы выполнены шихтованными из электротехнической стали.
Количество ферромагнитных элементов дисков статора zc и ферромагнитных элементов дисков ротора медленного вращения zp, приходящихся на одно полюсное деление, отличаются на единицу. На фиг. 4, 5 показан случай, когда число пар полюсов р=4, zc=48, zp=40. На одно полюсное деление приходится 6 секторов у диска статора и 5 секторов у диска ротора.
Синхронный электродвигатель работает следующим образом. При подаче на обмотку статора трехфазной системы напряжений возникает вращающееся магнитное поле с восемью полюсами. Оно увлекает за собой ротор-индуктор. Вместе с ним вращаются области большой магнитной индукции в дисках статора и ротора. В результате ротор поворачиваются так, что места совпадения положений ферромагнитных элементов дисков статора и ферромагнитных элементов дисков ротора находятся в зонах максимума модуля магнитной индукции.
За половину периода напряжения питания T/2=π/ω ротор-индуктор повернется на угол π/р, а места максимума модуля магнитной индукции повторятся. Частота вращения ротора-индуктора

При этом ротор должен повернуться на один сектор, т.е. на угол 2π/zp. Следовательно, магнитный редуктор имеет передаточное отношение zp/2p. Поэтому скорость вращения ротора будет ωр=2ω/zp. Здесь ω - угловая частота напряжения питания. Момент ротора (на валу)
Мр=zpMри/2p.
Наличие нескольких дисков статора и ротора с ферромагнитными секторами вызывает многократную деформацию магнитного поля в зоне дисков, что увеличивает развиваемый момент и позволяет улучшить массогабаритные показатели.
На торцевых поверхностях коронок зубцов 6, 7, обращенных к активной зоне, имеются клиновидные выступы в виде секторов, повторяющие по форме и количеству ферромагнитные элементы дисков статора, что увеличивает развиваемый момент.
Ферромагнитные элементы дисков статора и ротора медленного вращения выполнены из электротехнической стали шихтованными для уменьшения потерь в стали на вихревые токи, поскольку в процессе работы магнитная индукция в секторах изменяется.
Передача момента от ротора быстрого вращения к ротору медленного вращения является упругой - через магнитное поле. При увеличении момента нагрузки на валу медленного вращения он отстает на некоторый угол от положения, соответствующего холостому ходу.
Электродвигатель не имеет механических контактов между подвижными активными частями, бесшумен в работе, имеет большой срок службы, определяемый подшипниками, допускает ударные нагрузки, так как связь между роторами осуществляется через магнитное поле.
Удельная энергия магнитного поля определяется выражением
При линейной кривой размагничивания максимальная энергия постоянного магнита достигается при условии равенства магнитных сопротивлений постоянного магнита и нагрузки, которой являются зазоры между дисками статора и ротора медленного вращения. Это равенство обеспечивает высокие энергетические показатели и выполняется, если толщина магнита hм равна сумме длин зазоров между дисками, т.е. при выполнении равенства
hм=2mδ,
где δ - зазор между дисками, m - число дисков ротора.
Установка подшипника 20 ротора-индуктора на вал 21 увеличивает базу для вала и упрощает конструкцию. Ротор-индуктор усиливает поле, созданное обмоткой двигателя. Благодаря его размещению посередине и размещению зубцов с катушками на обоих магнитопроводах получается симметричная магнитная система и полностью снимается осевое усилие, действующее на вал. Подшипники 18, 19 нагружены лишь радиальными усилиями, что снижает напряжение трогания электродвигателя и повышает его надежность.
Центральное размещение ротора-индуктора с постоянными магнитами снижает магнитный поток рассеяния в магнитном редукторе приблизительно в четыре раза по сравнению с несимметричным размещением. Это увеличивает полезный магнитный поток, проходящий через диски статора и ротора, что увеличивает максимальный вращающий момент электродвигателя.
Мощность потерь в обмотках, приходящаяся на один торец электродвигателя, в два раза меньше, чем при одностороннем положении обмотки, что облегчает охлаждение электродвигателя и повышает его надежность.
Момент М электродвигателя с магнитным редуктором и объем V его жестких частей определяются выражениями


Здесь R1, R2 - внутренний и наружный радиусы активной части;  - толщина постоянного магнита;
- толщина постоянного магнита;  - осевая длина магнитного редуктора; h - толщина дисков статора и ротора; bc - радиальная толщина корпуса;
- осевая длина магнитного редуктора; h - толщина дисков статора и ротора; bc - радиальная толщина корпуса;  - осевая толщина корпуса; μ0 - магнитная постоянная; с1, с2, с3 - постоянные коэффициенты; kσ - коэффициент рассеяния.
- осевая толщина корпуса; μ0 - магнитная постоянная; с1, с2, с3 - постоянные коэффициенты; kσ - коэффициент рассеяния.
Проведен анализ электропривода по удельному объему
При расчетах приняты следующие значения параметров:
 с1=0,1; с2=0,8; с3=0,5;
с1=0,1; с2=0,8; с3=0,5;

 kσ=1,3;
kσ=1,3; 
На фиг. 6 приведены зависимости S(Rl) при  на фиг. 7 – при
на фиг. 7 – при  на фиг. 8 – при
на фиг. 8 – при  Здесь кривая 1 - R2=0,3 м; 2 - R2=0,35 м;…; 6 - R2=0,55 м. Радиус R1 изменяется от 0,1 м до 0,475 м. На графиках наблюдаются явно выраженные зоны минимума объемного показателя S.
Здесь кривая 1 - R2=0,3 м; 2 - R2=0,35 м;…; 6 - R2=0,55 м. Радиус R1 изменяется от 0,1 м до 0,475 м. На графиках наблюдаются явно выраженные зоны минимума объемного показателя S.
Таким образом, благодаря введению ступиц ротора-индуктора и ротора и увеличению внутреннего диаметра активной части электродвигателя из условия минимума объема твердых частей при фиксированном моменте получен синхронный электродвигатель для винта вертолета с улучшенными массо-габаритными показателями.
| название | год | авторы | номер документа |
|---|---|---|---|
| Синхронный электродвигатель с магнитной редукцией | 2018 |
|
RU2704491C1 |
| Синхронный электродвигатель с магнитной редукцией | 2017 |
|
RU2668817C1 |
| Мотор-колесо для самолета | 2018 |
|
RU2703704C1 |
| Мотор-колесо для летательного аппарата | 2022 |
|
RU2784743C1 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С МАГНИТНОЙ РЕДУКЦИЕЙ | 2015 |
|
RU2604058C1 |
| МОТОР-КОЛЕСО | 2017 |
|
RU2655098C1 |
| МОТОР-КОЛЕСО | 2017 |
|
RU2673587C1 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С МАГНИТНОЙ РЕДУКЦИЕЙ | 2015 |
|
RU2588599C1 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С МАГНИТНОЙ РЕДУКЦИЕЙ | 2013 |
|
RU2544835C1 |
| МАГНИТНЫЙ РЕДУКТОР | 2015 |
|
RU2594018C1 |
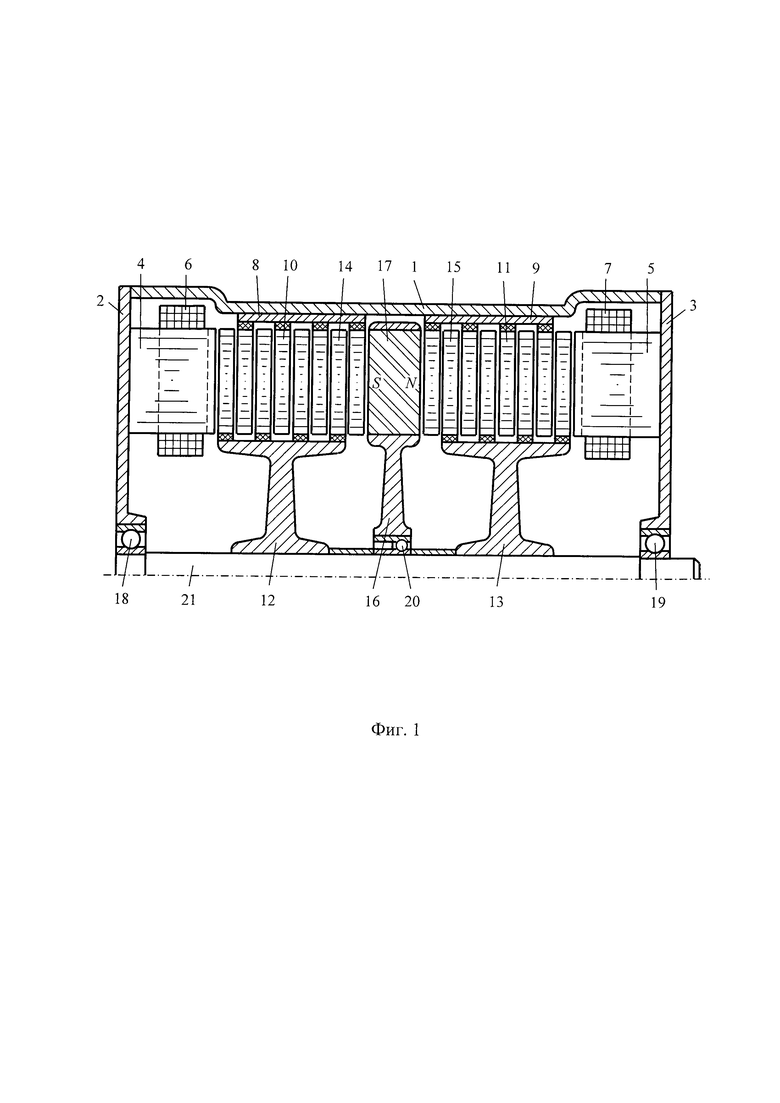
Изобретение относится к области электротехники и может быть использовано в качестве компактного привода несущего винта вертолета. Технический результат – улучшение массогабаритных показателей. Синхронный электродвигатель содержит корпус 1 и подшипниковые щиты 2, 3. На них установлены магнитопроводы 4, 5 статора с зубцами и с катушками 6, 7. Диски 10, 11 статора закреплены на втулках 8, 9 статора. Диски 10, 11 статора и диски 14, 15 ротора имеют ферромагнитные и немагнитные элементы в виде секторов и чередуются в пространстве. Количества ферромагнитных элементов на диске статора zc и на диске ротора zp связаны равенством zp=zc ± 2р, где р - число пар полюсов обмотки статора. Вал 21 опирается на подшипники 18, 19, установленные в подшипниковых щитах 2, 3. Постоянные магниты 17 в виде секторов намагничены аксиально и установлены на роторе-индукторе, который опирается на подшипник 20, установленный посередине на валу 21. Ротор и ротор-индуктор размещены на ступицах 12, 13, 16. 8 ил.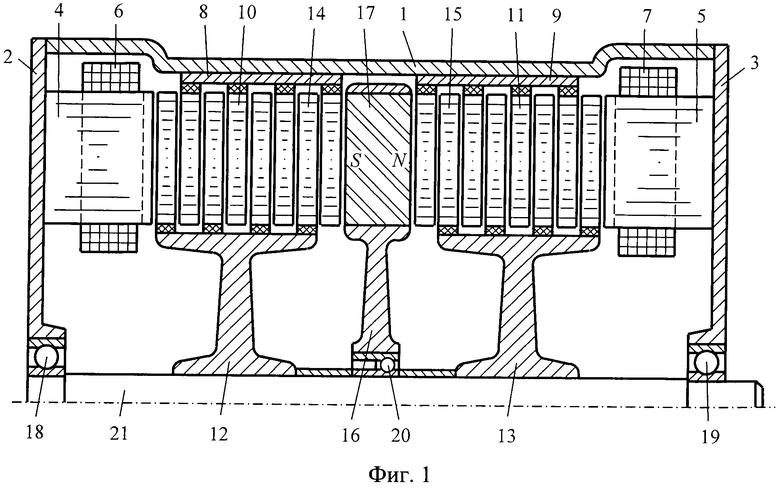
Синхронный электродвигатель для винта вертолета, содержащий корпус, магнитопровод статора с зубцами и с многофазной обмоткой, ротор-индуктор с постоянными магнитами и с подшипником, ротор на валу с подшипниками и статор имеют чередующиеся диски, состоящие из ферромагнитных и немагнитных элементов в виде секторов, постоянные магниты имеют вид секторов и намагничены аксиально с чередующейся полярностью, магнитопровод статора выполнен в виде двух колец из ленты электротехнической стали путем навивки, расположенных по торцам электродвигателя, накладные зубцы с катушками и коронками установлены на торцевых поверхностях первого, второго колец магнитопровода статора, на торцевых поверхностях коронок зубцов выполнены выступы, положение которых совпадает с ферромагнитными элементами дисков статора, причем количества ферромагнитных элементов на диске статора zc и на диске ротора zp связаны равенством zp=zc±2р, где р - число пар полюсов обмотки статора, а угловые размеры ферромагнитных элементов дисков статора и ротора различны, подшипник ротора-индуктора установлен посередине на валу ротора, а толщина постоянных магнитов hм на роторе-индукторе связана с числом дисков ротора и длиной зазора соотношением hм=2mδ, где δ - зазор между дисками, m - число дисков ротора, отличающийся тем, что ротор-индуктор и ротор имеют ступицы, а внутренний диаметр их активной части увеличен из условия минимума объема твердых частей при фиксированном моменте.
| Синхронный электродвигатель с магнитной редукцией | 2017 |
|
RU2668817C1 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С МАГНИТНОЙ РЕДУКЦИЕЙ | 2015 |
|
RU2604058C1 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С МАГНИТНОЙ РЕДУКЦИЕЙ | 2013 |
|
RU2544835C1 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С МАГНИТНОЙ РЕДУКЦИЕЙ | 2015 |
|
RU2588599C1 |
| US 5619087 A1, 08.04.1997 | |||
| US 20180198335 A1, 12.07.2018. | |||

