Область техники, к которой относится изобретение
Представленное изобретение относится к сигналам спутниковой радионавигации и, более конкретно, к способу и приемнику для обработки сигналов дальности с модулированной смещенной несущей (Offset Carrier Modulated, OCM).
Уровень техники
Используя такие системы, как GPS, спутниковая навигация стала решающим элементом общества и экономики. Глобальные навигационные спутниковые системы (Global Navigation Satellite Systems, GNSS) содержат передачу радионавигационных сигналов (обычно, но не исключительно, наземным) приемникам, где они обрабатываются и используются для целей определения дальности или вычисления решения о положении, скорости, времени (position, velocity, time, PVT).
Многие современные глобальные навигационные спутниковые системы (Global Navigation Satellite System, GNSS) широковещательно передают сложные сигналы с множественного доступа с кодовым разделением каналов (Code Division Multiple Access, CDMA), использующие модуляцию со смещением несущей (Offset Carrier Modulation, OCM). Эти сигналы содержат различные количества компонент основной полосы и диапазон поднесущих. Примерами являются (i) сигналы основной полосы с двоичной фазовой манипуляцией (Binary Phase-Shift Keyed, BPSK), модулированные синусоидальными поднесущими, давая в результате OCM-сигналы, (ii) сигналы основной полосы BPSK, модулированные прямоугольными поднесущими, дающие в результате сигналы с двоичной смещенной несущей (Binary Offset Carrier, BOC), и (iii) сигналы с квадратурной фазовой манипуляцией (Quadrature Phase-Shift Keyed, QPSK), использующие синусоидальные поднесущие. В целом, эти сигналы демонстрируют симметричную кривую спектральной плотности мощности (Power Spectrum Density, PSD) с минимальной мощностью на центральной частоте и двумя основными лепестками, расположенными с любой из сторон от центральной частоты сигнала и содержащими основную часть сигнала.
Такая форма спектра, связанная с автокорреляционными свойствами компонент CDMA основной полосы, дает в результате сигнал, способный обеспечить определение дальности с высокой точностью. Функция автокорреляции таких сигналов обычно имеет высокую крутизну и демонстрирует многочисленные пересечения нулевой линии. Поскольку точность определения дальности, обеспечиваемая этими сигналами, напрямую связывается с функцией автокорреляции сигнала, эти сигналы часто настраиваются так, чтобы иметь высокую крутизну вблизи точки пересечения нулевой линии. Однако, цена при этом обычно представляется как трудности, испытываемые приемником на начальной стадии захвата сигнала на сопровождение, а также при преобладании условий сильного многолучевого приема (в том числе, отраженных сигналов).
Поскольку многочисленные сигналы GNSS широковещательно передаются от каждого спутника, весьма распространено, что центральная частота сигнала, модулированного со смещением несущей, совпадает со вторым сигналом, который либо (a) не модулирован никакой поднесущей, либо (b) модулирован низкочастотной поднесущей.
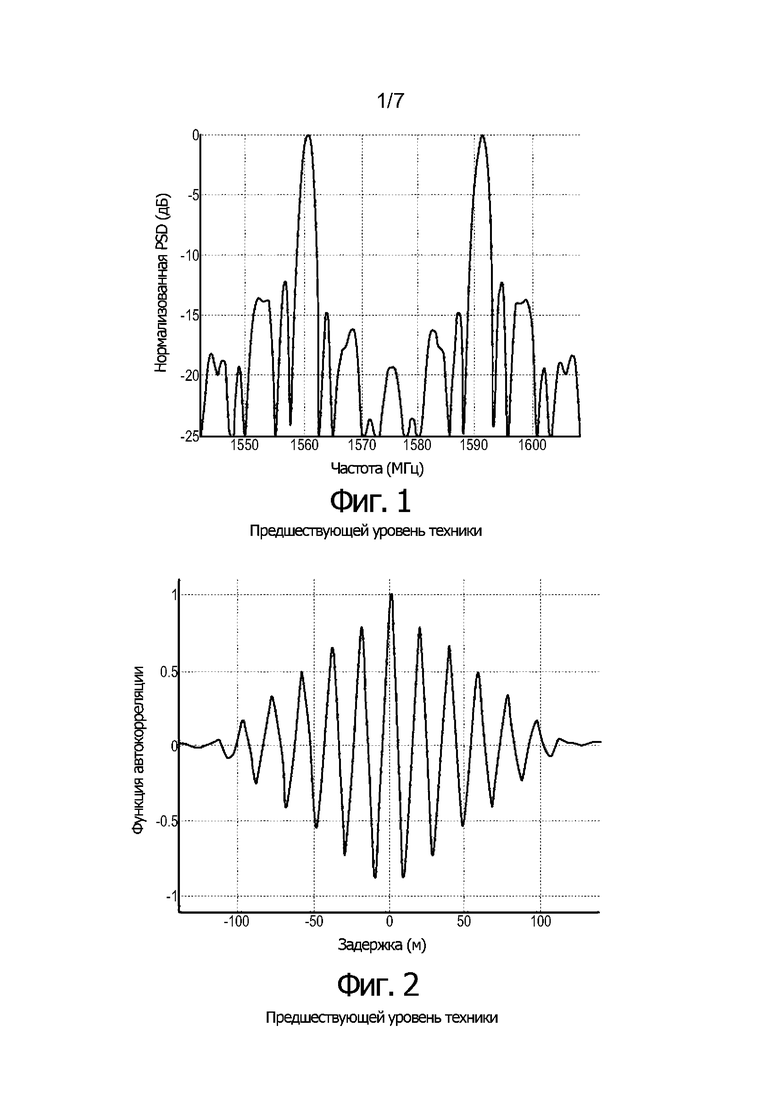
Чтобы продемонстрировать проблемы обработки сигналов, модулированных со смещением несущей, далее пример конфигурации OCM-сигнала будет обсуждаться со ссылкой на фиг. 1-5 (предшествующий уровень техники).
Конкретным сигналом, выбранным для целей иллюстрации, является OCM-сигнал, использующий прямоугольную поднесущую, обычно именуемую BOC-модуляцией, с первичной скоростью кодирования (2,5 x 1,023) Мсимволов/с и частотой косинусно фазированной поднесущей (15 x 1,023) МГц. Сложная модуляция, обозначенная как BOCC(15 2,5), имеет нормализованную функцию PSD и автокорреляции, показанные, соответственно, на фиг. 1 и 2.
[0008] Конкретно, интересующий сигнал (преобразованная вниз и оцифрованная версия сигнала радионавигации, принимаемого антенной приемника), обозначается sA(t) и моделируется следующим образом:

где PA обозначает номинальную принимаемую мощность, FA - номинальная центральная частота широковещательной передачи, CA(t) - последовательность распространения CDMA, и SCA(t) - прямоугольная поднесущая. Оценки различных параметров сигнала, в том числе, например, FA и θA, обычно извлекают посредством корреляции принятого сигнала и локальной реплики и результат, обычно упоминаемый как значение коррелятора и обозначаемый YA(f, τ, θ), вычисляется по формуле:
 (2)
(2)
где Т1, часто называемый периодом преддетекторного интегрирования, обычно имеет короткую длительность, возможно, несколько миллисекунд, и обычно выбирается в соответствии с периодом последовательности распространения sCDMA, CA.
Одной из характеристик этой модуляции, которая может создавать проблему для приемника, является присутствие многочисленных, так называемых, побочных пиков в функции автокорреляции, приводящих к неоднозначности получения сигнала. Когда приемник пытается захватить такой сигнал, он обычно реализует поиск по времени τ задержки кода, стремясь обнаружить самый большой пик автокорреляции. В идеале, это будет соответствовать выравниванию между принятым сигналом и сигналом локальной реплики. Проблема состоит в том, что из-за большой относительной величины соседних пиков, как положительных, так и отрицательных, функции автокорреляции BOCС(15, 2,5), присутствие помехи в виде теплового шума может заставить приемник идентифицировать один из соседних локальных максимумов в качестве максимального значения. С точки зрения работы приемника, это может соответствовать смещению в диапазоне измерения и, таким образом, ухудшить точность определения местоположения.
В качестве демонстрация этой конкретной проблемы, мы считаем, что сигнал был захвачен, обнаруживая и сопровождая отдельно каждую из его составляющих частей, верхних и нижних боковых лепестков. Это соответствует индивидуальному или объединенному захвату одного или обоих сигналов BPSK, центрированных на частоте Fc ± (15 х 1,023) МГц. Учитывая эту грубую оценку захвата, приемник может начать сопровождение сигналов BPSK, чтобы улучшить выравнивание по задержке и частоте и, в дальнейшем, попытаться достигнуть точного захвата сложного сигнала BOCС(15, 2,5). При этом приемник может заполнить пространство поиска захвата через неопределенность задержки. Обычно этот поиск будет иметь разрешающую способность по конечному диапазону и конечной задержке, так, что пространство неопределенности занимает выборки функции автокорреляции, показанные на фиг. 2. В качестве примера, мы полагаем, что приемник не может когерентно сопровождать сигнал, так что может существовать фазовая неопределенность и, следовательно, может реализовываться некогерентная схема обнаружения.
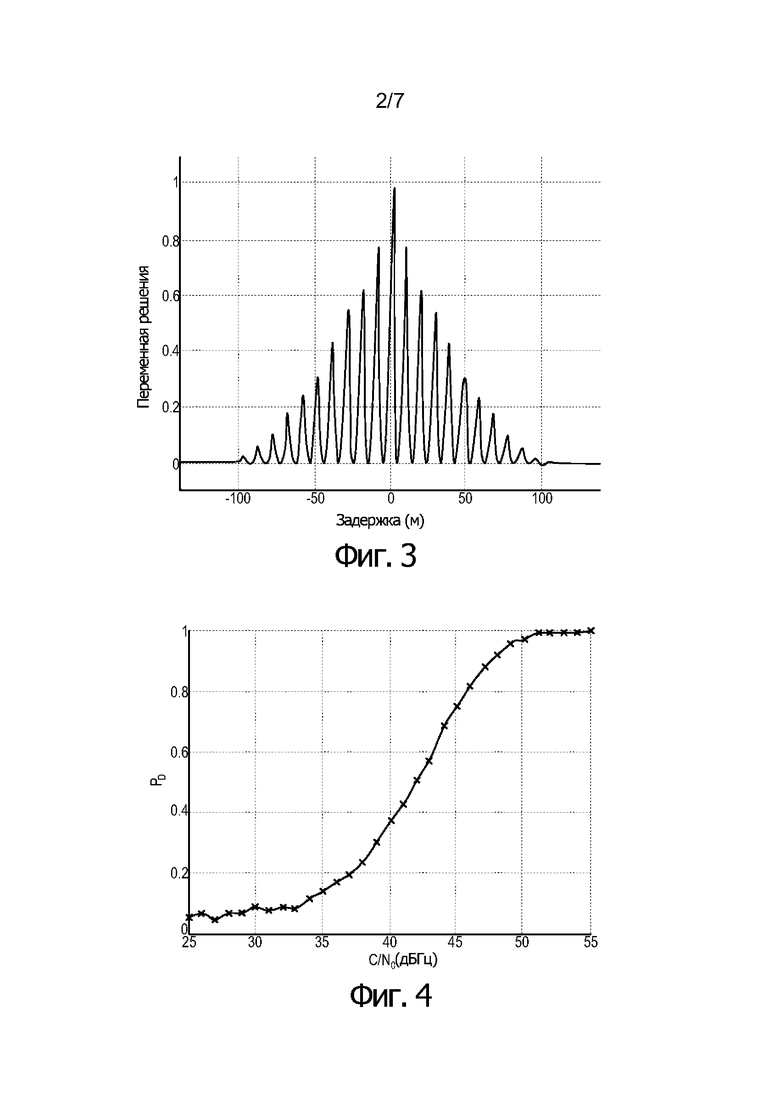
Переменная (|YA|2) решения, получаемая путем исследования квадрата величины комплексной корреляции YA между принятым сигналом и локальной репликой, имеющими полную частотную синхронизацию, невыровненную фазу и диапазон задержек кода, представлена на фиг. 3. При попытке выравнивания сигналов локальных реплик с принятыми сигналами GNSS, приемник может наблюдать диапазон задержек кода вокруг текущей наилучшей оценки. Этот диапазон будет зависеть от неопределенности текущей оценки задержки кода.
В качестве примера этой проблемы, на фиг. 4 показана вероятность выбора правильной задержки кода, исследуя диапазон значений коррелятора, расположенных с интервалом 1 метр в диапазоне ±30 метров для выбора принятых значений C/No. Хотя при отсутствии теплового шума, выбор соответствующей задержки кода будет тривиальным и при просмотре фиг. 4 понятно, что характеристики могут быстро ухудшаться с понижением качества сигнала. В частности, и как показано на фиг. 3, заслуживает внимания, что локальные максимумы, соседствующие с (центральным) глобальным максимумом, имеют относительные величины, примерно равные 0,8.
Результаты представлены на фиг. 4, из которого ясно, что приемник будет испытывать значительные трудности при захвате на сопровождение соответствующей задержки кода в условиях слабого сигнала. Конечно, результаты, представленные здесь, соответствуют случаю, в котором приемник интегрирует только в течение Т1= 1 мс. Характеристики могут быть улучшены, расширяя период интегрирования, однако, этот период, в конечном счете, ограничивается структурой сигнала и рабочими режимами приемника.
Еще одной дополнительной проблемой, испытываемой приемниками, обрабатывающими сигналы BOC, является ложный захват в архитектуре слежения за кодом из-за множества точек стабильного захвата. Обычно приемник будет формировать своего рода дискриминатор, чтобы оценивать неточность выравнивания последовательности, СА, распространения и вторичного кода, SСА, между принятым сигналом и локальной репликой. Это обычно делается, формируя значения коррелятора, которые равномерно распределены раньше и позже относительно наилучшей оценки задержки кода. Дифференцируя эти опережающие и запаздывающие значения коррелятора, соответственно обозначенные как YE и YL, можно сформировать оценку ошибки задержки кода.
В зависимости от конструкции приемника, он может или не может когерентно отслеживать фазу принятого сигнала. В случаях, когда принятый сигнал отслеживается, когерентная оценка может быть сделана, а если фаза сигнала не отслеживается или если она, возможно, неправильно выравнивается, то тогда может быть сделана некогерентная оценка. Например, основные оценки когерентной и некогерентной задержки могут быть сделаны посредством следующих выражений:


где Acoh и Anon-coh являются нормализованными коэффициентами усиления, обычно функция как мощности принятого сигнала, типа модуляции сигнала, так и относительного интервала между опережающими и запаздывающими значениями коррелятора; и 
На фиг. 5(a) показана оценка ошибки кода для когерентного случая и на фиг. 5(b) показана оценка ошибки кода в некогерентном случае для сигнала BOCc(15, 2,5), даваемого опережающим-запаздывающим коррелятором с интервалом 5 м. В когерентном случае, модуляция приводит в результате к двенадцати точкам стабильного захвата, которые не соответствуют истинной задержке сигнала, хотя, возможно, только десять из них являются существенными. Больше беспокоит то, что в некогерентном случае это количество увеличивается до двадцати четырех и диапазон, в котором оценка ошибки пропорциональна истинной ошибке, сужается в два раза. Последствиями является то, что приемник, работая в условиях несогласованности, таких как фединг или высокая динамика, может изо всех сил стремиться сойтись к правильной точке стабильного захвата, приводя в результате к смещенным результатам измерения расстояния.
Документ US2014119392A раскрывает приемник для приема сложного сигнала, передаваемого спутником, таким как навигационный искусственный спутник, (например, мультиплексированного двоичного сигнала со смещением несущей или контрольного компонента сигнала LlC для приемника глобальной системы навигации и определения положения (GPS)), способный, по меньшей мере, частично декодировать принятый сложный сигнал. В одном из вариантов осуществления принятый сложный сигнал является сигналом навигационного спутника, совместимого с системой Galileo, или спутника системы глобального позиционирования. В одном из вариантов осуществления принятый сложный сигнал относится к первому двоичному сигналу со смещением несущей, который мультиплексируется со вторым двоичным сигналом со смещением несущей.
Документ EP2402787A1 раскрывает приемник GNSS, который может выполнять корреляционную обработку сигнала позиционирования, фазомодулированного сигналом CBOC. Модуль корреляционной обработки выполняет корреляционную обработку между сигналом основной полосы и кодом реплики BOC(1, 1), чтобы получить на выходе данные корреляции BOC(1, 1), а также выполняет корреляционную обработку между сигналом основной полосы и кодом реплики BOC(6, 1), чтобы получить на выходе данные корреляции BOC(6, 1).
Раскрытие сущности изобретения
В одном из вариантов изобретения обеспечивается способ обработки сигналов дальности с модулированной смещенной несущей (OCM) в системе радионавигации, содержащей множество расположенных на спутниках передатчиков и по меньшей один наземный приемник, причем приемник выполнен с возможностью осуществления способа и упомянутый способ содержит этапы, на которых: принимают первый радионавигационный сигнал по меньшей мере от одного из множества передатчиков и получают из него первый OCM-сигнал SA; принимают второй сигнал SB, синхронно широковещательно передаваемый вместе с первым OCM-сигналом SA, причем второй сигнал SB имеет ту же самую или соседнюю центральную частоту относительно первого OCM-сигнала SA; формируют объединенное корреляционное значение YC, причем объединенное корреляционное значение YC соответствует корреляции объединенного сигнала SC с репликой первого OCM-сигнала, объединенного сигнала SC, полученного в результате когерентного объединения в приемнике первого OCM-сигнала SА со вторым сигналом SВ; и получают информацию о дальности, основанную на объединенном корреляционном значении YC.
В одном из вариантов осуществления центральная частота второго сигнала SB выбирается так, что, спектральная плотность мощности (PSD) второго сигнала SB занимает ширину полосы, содержащуюся между двумя лепестками первого OCM-сигнала SА. Второй сигнал SB может (i) не иметь никакой поднесущей или (ii) иметь поднесущую SСB, причем поднесущая SСB является более низкочастотной, чем поднесущая SCA первого сигнала SА. SCВ поднесущей второго сигнала SB может быть прямоугольным сигналом.
В одном из вариантов осуществления центральные частоты первого OCM-сигнала SA и второго сигнала SB различаются не более, чем суммой поднесущих первого OCM-сигнала SA и второго сигнала.
В одном из вариантов осуществления центральные частоты первого OCM-сигнала SA и второго сигнала SB удовлетворяют неравенству:
где первый OCM-сигнал SA и второй сигнал SB имеют центральные частоты 



В одном из вариантов осуществления центральные частоты первого OCM- сигнала SA и второго сигнала SB удовлетворяют неравенству:

где первый OCM-сигнал SA и второй сигнал SB имеют центральные частоты
Второй сигнал SB может синхронно широковещательно передаваться вместе с первым OCM-сигналом SA.
Второй сигнал SB может содержать (i) OCM-сигнал или (ii) сигнал BOC.
В одном из вариантов осуществления генерирование объединенного корреляционного значения YC содержит когерентное объединение первого OCM-сигнала SА со вторым сигналом SB в соответствии с выражением:

генерирование, используя объединенную функцию интегрирования и вывода, объединенное корреляционное значение 
В одном из вариантов осуществления генерирование объединенного корреляционного значения
генерирование, используя первую функцию интегрирования и вывода, первого корреляционного значения 
где CA(t) - последовательность распространения CDMA, и SCA(t) - поднесущая первого OCM-сигнала SA;
генерируют, используя вторую функцию интегрирования и вывода, второе корреляционное значение 

где CB(t) - последовательность распространения CDMA, и SCВ(t) - поднесущая второго сигнала SВ; и
когерентно объединяют первое корреляционное значение YA и второе корреляционное значение YВ, чтобы сгенерировать объединенное корреляционное значение YС. Поднесущая SCA первого сигнала SА и/или поднесущая SCВ второго сигнала SВ может быть прямоугольным сигналом.
В одном из вариантов осуществления генерирование объединенного корреляционного значения YС содержит генерирование YС как взвешенной суммы
YC = kАYA + kBYB,
где YA и YB - корреляционные значения, полученные из первого OCM-сигнала SA и второго сигнала SВ, соответственно, и kА и kB являются весовыми коэффициентами.
Генерирование объединенного корреляционного значения YC может содержать генерирование YC в соответствии с выражением:

где СА(t) - последовательность распространения CDMA и SСА(t) - поднесущая первого OCM-сигнала SA;
где СB(t) - последовательность распространения CDMA и SСB(t) - поднесущая второго сигнала SB; и
где kA и kB - весовые коэффициенты и kA + kB = l. В одном из вариантов осуществления, kA = kB. Поднесущая SCA первого сигнала SA и/или поднесущая SCB второго сигнала SB может быть прямоугольным сигналом.
Способ может дополнительно содержать обеспечение модуля генерирования на основе объединенного корреляционного значения YC функции ошибки задержки кода; где отношение kA : kB выбирается так, что график функции ошибки задержки кода имеет только одно пересечение нулевой линии с положительным наклоном.
Способ может дополнительно содержать работу приемника в первом режиме в течение первого периода, в который отношение kA : kB различно, пока не будет удовлетворено условие, что график функции ошибки задержки кода, определяемый, основываясь на объединенном корреляционном значении YC, будет иметь только одно пересечение нулевой линии с положительным наклоном; и работу приемника во втором режиме после того, как условие будет удовлетворено, в который отношение kA : kB имеет заданное значение. Предпочтительно, заданное значение находится в диапазоне, определяемом от kA = kB до kA >> kB .
В одном из вариантов осуществления, отношение kA : kB непрерывно варьируется в ответ на факторы окружающей среды, факторы мощности сигнала и/или факторы динамики пользователя.
В соответствии с другим вариантом, обеспечивается приемник для обработки сигналов дальности с модулированной смещенной несущей (OCM) в системе радионавигации, содержащей множество установленных на спутниках передатчиков и по меньшей мере один наземный приемник, причем приемник содержит антенну для приема первого сигнала радионавигации по меньшей мере от одного из множества передатчиков, и схему обработки, связанную с приемом первого сигнала радионавигации, причем схема обработки выполнена с возможностью осуществления способа по любому из п.п. 1-16 приложенной формулы изобретения.
В соответствии с другим вариантом, обеспечивается записываемый, перезаписываемый или пригодный для хранения носитель, на котором записываются или хранятся данные, определяемые или пригодные для преобразования в команды для исполнения схемой обработки и соответствующие, по меньшей мере, этапам любых из п.п. 1-16 приложенной формулы изобретения.
В соответствии с другим вариантом, обеспечивается серверный компьютер, содержащий устройство связи и устройство памяти и выполненный с возможностью передачи по запросу или как-либо иначе данных, определяющих или пригодных для преобразования в команды для исполнения схемой обработки, и соответствующих, по меньшей мере, этапам любого из п.п. 1-16 приложенной формулы изобретения.
Краткое описание чертежей
Варианты осуществления изобретения теперь будут описаны посредством примера со ссылкой на сопроводительные чертежи, на которых:
фиг. 1 (предшествующий уровень техники) - нормализованная PSD сигнала BOCC(15 2,5);
фиг. 2 (предшествующий уровень техники) - нормализованная функция YA автокорреляции сигнала BOCC(15, 2,5);
фиг. 3 (предшествующий уровень техники) - нормализованная переменная (|YA|2) некогерентного решения сигнала BOCC(15 2,5);
фиг. 4 (предшествующий уровень техники) - вероятность выбора правильной задержки кода сигнала BOCc(l5, 2,5) при заданных значениях задержки кода в диапазоне ±30 метров при интервале 1 метр и периоде когерентного интегрирования 1 мс;
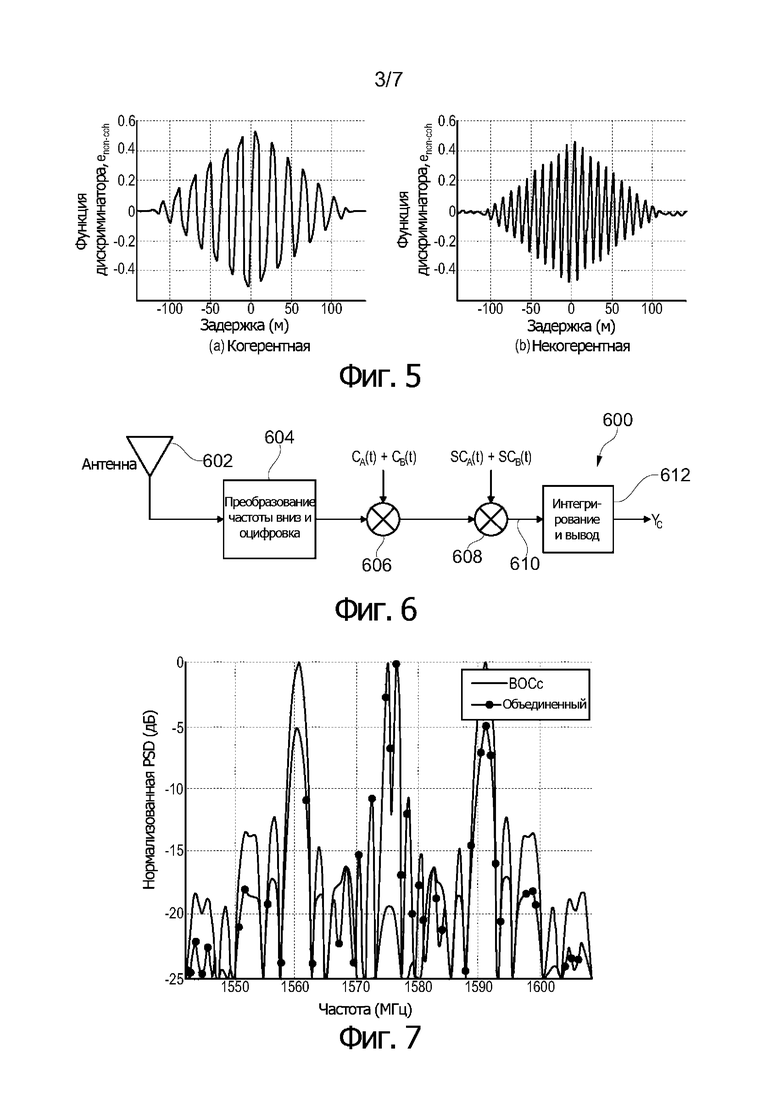
фиг. 5 (предшествующий уровень техники) - (a) когерентная оценка ошибки кода, и (b) некогерентная оценка ошибки кода для сигнала BOCc(15, 2,5) при заданном интервале опережающего-запаздывающего коррелятора;
фиг. 6 - схематичная блок-схема приемника, соответствующего варианту осуществления изобретения, показывающая объединенную обработку двух сигналов, sA(t) и sВ(t) как одного когерентного сигнала sС(t);
фиг. 7 нормализованная PSD объединенного сигнала sС(t), сгенерированного посредством когерентного объединения сигнала BOCc(15 2,5) и концентрического сигнала BOCs(l, l);
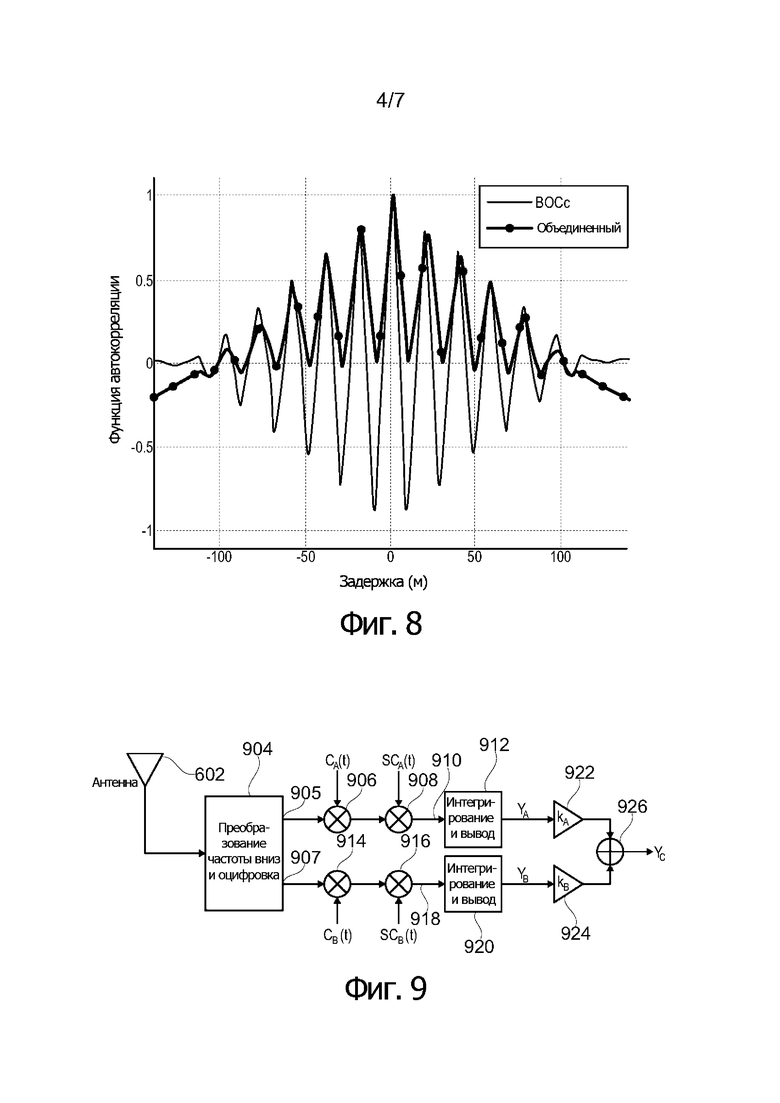
фиг. 8 - нормализованная автокорреляционная функция Yc объединенного сигнала sС(t);
фиг. 9 - схематичная блок-схема приемника, соответствующего другому варианту осуществления изобретения, показывающая объединенную обработку двух сигналов sА(t) и sВ(t) посредством взвешенного линейного сложения соответствующих значений YA и YB коррелятора;
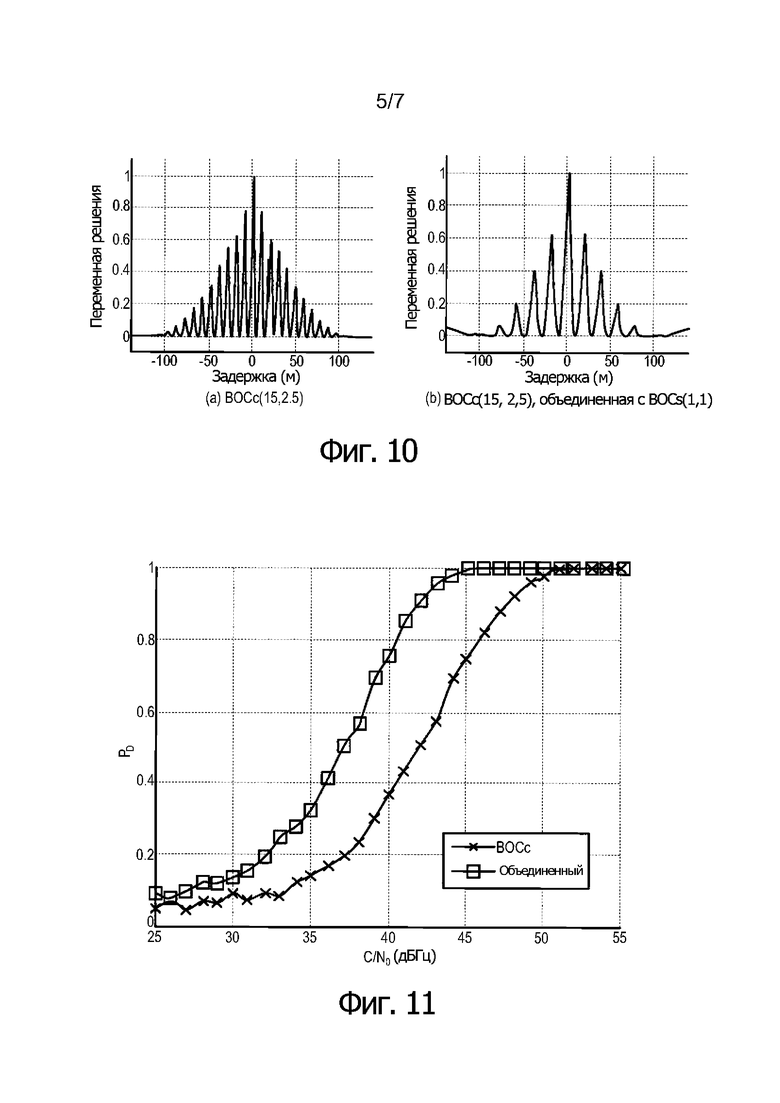
фиг. 10 - нормализованная переменная |YС |2 некогерентного решения для объединенного сигнала sС(t);
фиг. 11 - график вероятности выбора правильной задержки кода для каждого из первого сигнала sA(t) и объединенного сигнала sС(t) при заданных значениях задержки кода в диапазоне ±30 метров, интервале 1 метр и периоде когерентного интегрирования 1 мс;
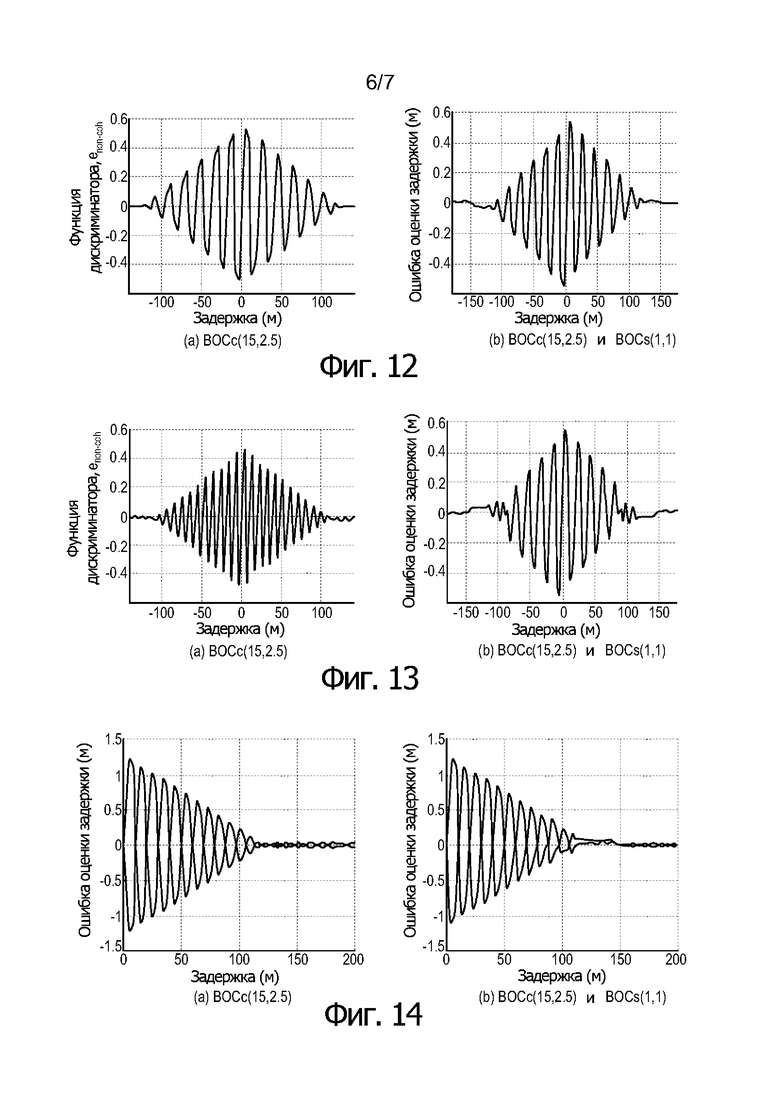
фиг. 12 - когерентная оценка ошибки кода для (a) сигнала BOCc(l5, 2,5) и (b) объединенного сигнала sС(t) при заданном интервале 5 метров опережающего-запаздывающего коррелятора;
фиг. 13 - некогерентная оценка ошибки кода для (a) сигнала BOCc(l5, 2,5) и (b) объединенного сигнала sС(t), при заданном интервале 5 метров опережающего-запаздывающего коррелятора;
фиг. 14 - многолучевая огибающая (a) сигнала BOCc(15, 2,5) и (b) объединенного сигнала sС(t), предполагая интервал 5 м опережающего-запаздывающего коррелятора и зеркальное отражение сигнала, имеющего мощность -6 дБ относительно сигнала на линии прямой видимости; и
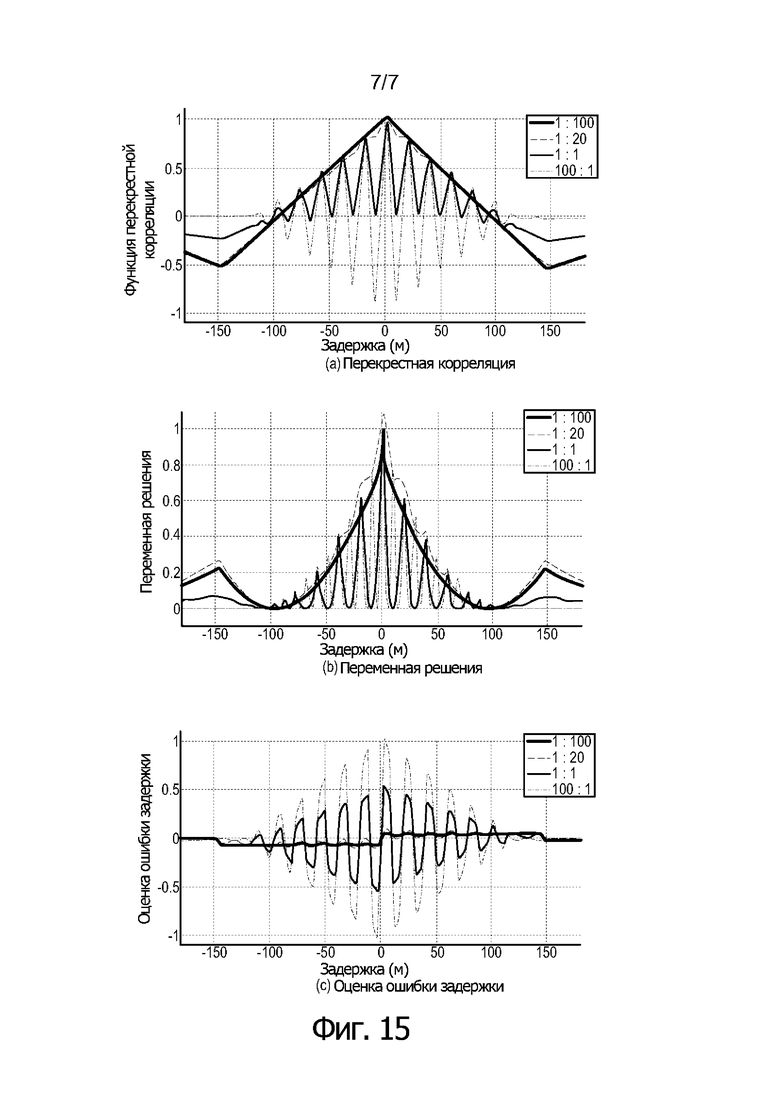
фиг.15 - (a) перекрестная корреляция, (b) переменная решения о захвате на сопровождение и (c) оценка задержки кода объединенного сигнала sС(t) для отношений коэффициентов взвешивания {kA, kB} сигналов, равных 1:100, 1:20,1:1 и 100:1 для каждого.
Осуществление изобретения
В дальнейшем схожие ссылочные позиции будут использоваться для обозначения схожих элементов. Термин "когерентное объединение" двух сигналов, как он используется здесь, является линейным сложением сигналов во временной области в форме комплексных чисел, в отношении относительного фазирования сигналов, как они широковещательно передаются передатчиком.
Как упомянуто выше, поскольку в GNSS широковещательно передается множество сигналов от каждого спутника, весьма распространенным является то, что центральная частота сигнала, модулированного со смещением несущей, совпадает со вторым сигналом, который либо (a) не имеет поднесущей, либо (b) был модулирован низкочастотной поднесущей. Настоящее раскрытие описывает технологию обработки сигналов, модулированных со смещением несущей, в присутствии этих вторых сигналов. Эта технология устраняет некоторые из проблем, свойственных приемникам, обеспечивая снижение вероятности захвата на сопровождение на побочном пике и снижение чувствительности при многолучевом распространении. Таким образом, нет необходимости, чтобы второй сигнал SB модулировался поднесущей, поскольку настоящее изобретение будет функционировать и обеспечивать отмеченные улучшения характеристик, если второй сигнал SB не модулируeтся поднесущей. Если второй сигнал SB модулируется поднесущей, то настоящее изобретение будет функционировать, однако, улучшения будут достигаться, только если частота поднесущей будет ниже, чем частота поднесущей первого сигнала SА.
На фиг. 6 схематично представлена блок-схема приемника 600, соответствующего варианту осуществления изобретения, показывающая объединенную обработку двух сигналов, sА (t) и sВ (t), как одного когерентного сигнала, sС (t).
В варианте осуществления второй сигнал sВ(t) широковещательно передается на той же самой центральной частоте, что и sA(t). В представленном варианте осуществления в качестве второго сигнала sВ(t) используется другая модуляция BOC, хотя, в принципе, для второго сигнала sВ(t) мог бы использоваться любой тип модуляции.
Таким образом, в представленном варианте осуществления, второй сигнал sВ(t) содержит BOCsc(l, 1), имеющий следующую модель сигнала:

где условные обозначения аналогичны условным обозначениям в модели (1). В представленном варианте осуществления как sА(t), так и sВ(t) центрированы на частоте FA. Предпочтительно, представленный вариант осуществления основан на обработке приемником единого объединенного сигнала следующего вида:
sC(t) = sa(t) + sb(t) (8)
Как показано на фиг. 6, антенна 602 принимает сигнал радионавигации, который подается на модуль 604 преобразования частоты вниз и оцифровки, с выхода которого выводится оцифрованный сигнал sA(t) (выборки). Как схематично показано, sA(t) и sВ(t) эффективно когерентно объединяются, причем первый компонент СВ(t) второго сигнала sВ(t) объединяется с компонентом СА(t) последовательности распространения CDMA первого сигнала sА(t) в первом смесителе 606, а второй компонент SСВ(t) второго сигнала sВ(t) объединяется с поднесущей SСА(t) прямоугольного первого сигнала sА(t) во втором смесителе 608. Результирующий когерентно объединенный сигнал 610 подается на первый модуль 612 интегрирования и загрузки, в котором выполняется корреляция с сигналом локальной реплики, чтобы получить значение YC коррелятора объединенного сигнала sС(t). В вариантах осуществления сигналы SА и SВ являются отдельными и разными, особенно в том, что они могут использовать разный код распространения CDMA, так СА и СВ являются разными. В вариантах осуществления представленного изобретения используются два по-настоящему различных сигнала, которые могут иметь две различные несущие, два различных кода распространения и/или две различных модуляции данных (если они присутствуют).
Следуя выражению (2), значения YC коррелятора, вычисленные для этого объединенного сигнала генерируются следующим образом:
где kA и kB - весовые коэффициенты, kA + kB = 1, и

как изображено на фиг. 6. Таким образом, компонент SА(t) сигнала коррелируется с компонентами СА и SСА, в то время как сигнальный компонент SB(t) сигнала коррелируется с компонентами СВ и SСВ.
Для простоты и для целей иллюстрации, в представленном варианте осуществления номинальная принятая мощность для sА(t) и sb(t), то есть, РА и РВ, равны; однако, это не обязательно должно иметь место. Кроме того, в представленном варианте осуществления, kA = kВ. Случаи, когда kA ≠ kВ обсуждаются позже в настоящем раскрытии.
Изобретатели обнаружили, что улучшение по сравнению с характеристиками обработки приемника по технологиям, показанным на фиг. 1-5, может быть достигнуто, объединяя принятый OCM-сигнал с другим сигналом, имеющим ту же самую или соседнюю центральную частоту.
В одном из вариантов осуществления PSD второго сигнала занимает полосу частот, расположенную между двумя лепестками PSD OCM-сигналов. Это обычно подразумевает, что центральные частоты двух сигналов должны различаться не более, чем на сумму поднесущих двух сигналов. Например, если PSD сигналов A и B имеют центральные частоты 




однако, технологии, соответствующие вариантам осуществления изобретения все еще обеспечивают существенное улучшение, когда удовлетворяется следующее, менее ограничительное, условие:

Следует заметить, однако, что требования, представленные в (5) и (6), представляют условия, которые обеспечивают оптимальные или почти оптимальные характеристики, но не представляют абсолютные или обязательные требования. Чтобы продемонстрировать эти потенциальные улучшения, далее обсуждается другой пример.
На фиг. 7 показана нормализованная PSD объединенного сигнала SC(t), сгенерированного посредством когерентного объединения сигнала BOCc (15 2,5) (SA) и концентрического сигнала BOC (l, l) (SВ) вместе с PSD для сигнала SA. Следует заметить, что добавление второго сигнала концентрирует значительную часть мощности вблизи центральной частоты сигнала.
На фиг. 8 показана нормализованная функция YC автокорреляции объединенного сигнала sC(t), вместе с YC сигнала sA. Очевидно, что в результате использования объединения функция YC автокорреляции сигнала имеет положительное смещение и имеет отклонения ниже нуля с более низкой величиной, чем для sA.
На фиг. 9 схематично представлена блок-схема приемника, соответствующая другому варианту осуществления изобретения, показывающая объединенную обработку двух сигналов, sA(t) и sВ(t) путем взвешенного линейного сложения соответствующих значений YA и YB коррелятора. Следует заметить, что поскольку процесс корреляции является линейным, объединение двух компонент сигнала может также быть сделано после операции корреляции в соответствии с альтернативным способом, показанным на фиг. 9.
Более конкретно, антенна 602 принимает сигнал радионавигации, подаваемый на модуль 904 преобразования вниз по частоте и оцифровки, на выходе которого присутствует оцифрованный сигнал sA(t) 905, а также sB(t) 907. Как схематично показано, sA(t) эффективно объединяется с компонентом CA(t) последовательности распространения CDMA первого сигнала sA(t) в третьем смесителе 906 и объединяется с поднесущей SCA(t) прямоугольного сигнала для первого сигнала sA(t) в четвертом смесителе 908. Результирующий объединенный сигнал 910 подается на второй модуль 912 интегрирования и вывода, в котором выполняется корреляция с сигналом локальной реплики, чтобы получить первое значение YA коррелятора для первого сигнала sA(t).
Как схематично показано, sB(t) эффективно объединяется с первым компонентом CB(t) второго сигнала sB(t) в пятом смесителе 914, и объединяется с поднесущей SCB(t) прямоугольного сигнала для первого сигнала sB(t) в шестом смесителе 916. Результирующий объединенный сигнал 918 подается на третий модуль 920 интегрирования и вывода, в котором выполняется корреляция с сигналом локальной реплики, чтобы получить значение YB коррелятора первого сигнала sB(t).
Затем, первое значение коррелятора YA умножается на первый весовой коэффициент kA в первом усилителе 922 и второе значение YB коррелятора умножается на второй весовой коэффициент kВ на втором усилителе 924.
Наконец, взвешенные выходные сигналы kАYA и kВYВ когерентно объединяются в устройстве 926 объединения, создавая объединенное значение YC коррелятора.
На фиг. 10 представлены (a) нормализованная переменная |YA|2 когерентного решения для первого сигнала sA(t) (BOCc(15 2,5)), и (b) нормализованная переменная |YС|2 некогерентного решения для объединенного сигнала sC(t) (когерентно объединенные сигнал BOCc(15 2,5) и концентрический сигнал BOCs(l, l)). Это показывает предпочтительное уменьшение неоднозначности захвата с последующим сопровождением, соответствующей вариантам осуществления изобретения.
Хотя функция YC автокорреляции объединенного сигнал sC(t) подобна по сложности и количеству вершин такой же функции, как для сигнала sA(t) BOCc (15, 2,5), положительное смещение и отсутствие больших отрицательных отклонений означают, что квадрат значения функции автокорреляции сильно отличается. Как очевидно из фиг. 10, где показаны квадраты величин каждой из функций |YA|2 и |YС|2 автокорреляции, объединенный сигнал sC(t) приводит в результате к функции, имеющей гораздо меньшее количество локальных максимумов, что снижает неоднозначность захвата.
Снова обратимся к упомянутым выше проблемам, что сигнал был захвачен, обнаруживая и сопровождая каждый из его компонент, верхний, нижний и теперь центральные лепестки, отдельно. Учитывая эту грубую оценку захвата, приемник может начать сопровождать индивидуальные сигналы, чтобы уточнить выравнивание задержки и частот и, в дальнейшем, сделать попытку точного захвата сложного сигнала, sC.
На фиг. 11 представлен график вероятности выбора правильной задержки кода для объединенного сигнала, sC(t), при данных значениях задержки кода в диапазоне ±30 метров, интервале 1 метр и периоде когерентного интегрирования 1 м, для выбора принятых значений C/No. Сюда также для сравнения внесены результаты для случая только BOCc(15 2,5) (sA(t)).
Совершенно неважно, что присутствуют два фактора. Во-первых, внесение второго сигнального компонента, sB, увеличивает мощность принимаемого сигнала вдвое, считая, что РА=РВ. Таким образом, разумно предположить, что кривые вероятности обнаружения должны быть подобны по форме, но кривая для объединенного сигнала должна быть смещена приблизительно на 3 дБ. Второй фактор заключается в том, что в объединенном случае существуют гораздо меньше локальных максимумов (в YC), в этом варианте осуществления их существует приблизительно вдвое меньше. Поэтому приемник будет значительно менее вероятно ошибочно обозначать локальный максимум как глобальный максимум.
Графики на фиг. 11 демонстрируют улучшение, которое может быть достигнуто, когерентно объединяя оба сигнала. Действительно, в некоторых случаях улучшение может составить порядка 5 дБ. Предпочтительно, поскольку расположения локальных максимумов находятся далеко от глобального максимума, соответствующее взвешивание |Yc|2 (выбор kA и kВ), основанное на априорном распределении ошибок в объединенном случае дает в результате большее улучшение, чем в случае только одного сигнала BOCc(15, 2,5).
Варианты осуществления изобретений также обеспечивают пониженную неоднозначность слежения. В вариантах осуществления способ обработки первого сигнала sA(t) (BOCc (l5, 2,5)) посредством когерентного объединения с концентрическим вторым сигналом SВ(t) (BOC (l, 1)) также может обеспечивать некоторые улучшения характеристики сопровождения задержки кода. Как и с неоднозначностью захвата, снижение сложности квадрата величины функции автокорреляции способствует этому улучшению.
На фиг. 12 представлена оценка когерентной ошибки кода для (a) сигнала BOCc (l5, 2,5) и для (b) объединенного сигнала sC(t), учитывающая интервал 5 м опережающего-запаздывающего коррелятора. Фиг. 13 показывает некогерентную оценку ошибки кода для (a) сигнала BOCc (15, 2,5) и для (b) объединенного сигнала sC(t), учитывающая интервал 5 м опережающего-запаздывающего коррелятора. Как можно видеть на фиг. 12, когерентный дискриминатор, когда применяется к объединенному сигналу, может обеспечивать характеристики, схожие с традиционным случаем, только для BOCc(15, 2,5). Однако, в некогерентном случае добавление второго сигнала, sB, сокращает количество точек ложного захвата в два раза, как показано на фиг. 13. Это может значительно повысить ошибкоустойчивость в средах со сложными условиями распространения.
Одним из предметов рассмотрения в приемных системах является многолучевая огибающая. На фиг. 14 показана многолучевая огибающая (a) сигнала BOCc(15, 2,5) и (b) объединенного сигнала sC(t), предполагающая интервал 5 м опережающего-запаздывающего коррелятора и зеркальное отражение сигнала, имеющего мощность -6 дБ относительно сигнала на линии прямой видимости.
В вариантах осуществления, несмотря на изменение характеристик устройства оценки задержки кода, характеристики объединенного сигнала sC(t) подобны характеристикам BOCc (15, 2,5) (sА(t)), когда он обрабатывается один. Распространенным способом оценки чувствительности сигнала дальности к многолучевому распространению является исследование его, так называемой, многолучевой огибающей. Здесь рассматривается единичное зеркальное многолучевое отражение. Предполагается, что сигнал приходит на приемник с мощностью, равным одной четверти (-6 дБ) от сигнала на линии прямой видимости. Диапазон относительных задержек многолучевого сигнала учитывается и находят наибольшие отклонения центрального пересечения нулевой линии оценки задержки кода. На фиг. 14 показана эта многолучевая огибающая для сигнала BOCc(l5, 2,5) сигнал (sA(t)) и сигнала объединенной обработки BOCc(15, 2,5) и концентрического сигнала BOCs(l, 1) (sC(t)), где можно видеть, что многолучевые огибающие почти идентичны по форме и по величине.
Предпочтительные варианты осуществления типа объединяемого сигнала, обсуждавшегося выше, позволяют пользователю определить свойства корреляции сигнала. Как указано в (11), объединенное значение (YC) коррелятора формируется как взвешенная сумма корреляции (kAYA + kBYB) каждого из сигнальных компонент, sA и sB. Манипулируя весовыми коэффициентами (kA и kB), пользователь может добиться множества различных свойств корреляции. Они могут быть использоваться на этапах, как захвата, так и сопровождения. Короче говоря, они могут быть обобщены следующим образом.
На фиг. 15 показаны (a) перекрестная корреляция, (b) переменная решения при захвате, и (c) оценка задержки кода для объединенного сигнала sC(t) для каждого из весовых соотношений сигнала {kA, kB} 1:100, 1:20, 1:1 и 100:1. Функцией автокорреляции можно манипулировать, как показано на фиг. 15(a), так чтобы она относилась к любому из сигнальных компонент или к чему-либо между ними. В этом случае это соответствует приблизительно сигналу BOCS(1, 1) для соотношения {kA : kB} = {1: 100}, для различных форм, которые напоминают модуляцию Composite Binary Offset Carrier (CBOC), чтобы окончательно предположить, что это приблизительно соответствует сигналу BOCs(15, 2,5) для соотношения {kA : kB} = (100: 1}. Эти различные весовые коэффициенты могут быть подкреплены на этапе захвата, где случаи kB ≥ kA имеют меньшие локальные максимумы, как показано на фиг. 15(b), снижая, таким образом, вероятность захвата на побочном пике.
В вариантах осуществления, в области сопровождения также возможно использовать вышеупомянутую технологию, чтобы создавать различные свойства модуляции, в зависимости от применения. Пользователю может быть желательно при определенных обстоятельствах воспользоваться малой неоднозначностью компонента BOCs(l, 1), тогда как высокая точность, предлагаемая BOCs(15, 2,5), может быть желательна в других случаях. Варианты осуществления позволяют пользователю варьировать выбором конкретной конфигурации взвешивания.
Варианты осуществления также обеспечивают способ обнаружения точки стабильного захвата, которая соответствует истинной задержке сигнала. В одном из вариантов осуществления, выбирая определенные варианты взвешивания, можно гарантировать, что функция ошибки задержки кода имеет только одно пересечение нулевой линии с положительным наклоном. В частности, в выбранном здесь варианте осуществления это соответствует случаю kВ ≥ 20kА, как показано на фиг. 15(c). Кроме того, в одном из вариантов осуществления, когда идентифицировано соответствующее пересечение нулевой линии, отношение может быть уменьшено до единицы или ниже того, которое соответствует одному только сигналу BOCs(15, 2,5).
В вариантах осуществления в ответ на такие факторы, как окружающая среда, мощность сигнала и динамика пользователя, непрерывная адаптивная вариация коэффициентов {kA, kВ} (например, пользователем) может выполняться как на этапе захвата, так и на этапе сопровождения.
В итоге, здесь, по меньшей мере в вариантах осуществления, представляется новый способ обработки OCM-сигнала как части когерентного объединения с другим синхронно широковещательно передаваемым сигналом, имеющий соседнюю центральную частоту. Технология предоставляет пользователю множество преимуществ, в том числе: (i) пониженная неоднозначность захвата; (ii) пониженная вероятность ложного захвата кода; (iii) повышенная чувствительность; и (iv) настройка на стороне пользователя свойств корреляции сигнала. Был представлен примерный вариант осуществления, содержащий сигнал BOCc(l5, 2.5) и концентрический сигнал BOCs(l, 1), и предоставлены частные результаты и соответствующие параметры приемника, относящиеся конкретно к данному варианту осуществления. Однако, концепция когерентного объединения многочисленных сигналов таким способом может, конечно, быть распространена на любой выбор двух или более соответствующих сигналов.
Хотя варианты осуществления были описаны со ссылкой на варианты осуществления, имеющие различные компоненты в их соответствующих реализациях, следует понимать, что другие варианты осуществления используют другие объединения и перестановки этих и других компонентов.
Дополнительно, некоторые из вариантов осуществления описываются здесь как способ или объединение элементов способа, который может быть реализован процессором компьютерной системы или другими средствами выполнения функции. Таким образом, процессор с необходимыми командами для выполнения такого способа или элемента способа образует средство выполнения способа или элемента способа. Дополнительно, описанный здесь элемент варианта осуществления устройства является примером средства осуществления функции, исполняемой элементом с целью реализации изобретения.
В представленном здесь описании излагаются многочисленные конкретные подробности. Однако, следует понимать, что варианты осуществления изобретения на практике могут быть осуществлены без этих конкретных подробностей.
Таким образом, хотя здесь было описано то, что считается предпочтительными вариантами осуществления изобретения, специалисты в данной области техники должны понимать, что в них могут быть сделаны другие и дополнительные модификации, не отступая от сущности и объема защиты изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЕМОДУЛЯЦИИ СИГНАЛОВ ГАЛИЛЕЯ С ПЕРЕМЕННОЙ БИНАРНОЙ СМЕЩЕННОЙ НЕСУЩЕЙ (ALTBOC) | 2004 |
|
RU2349049C2 |
| ОБОРУДОВАНИЕ ДЛЯ ОБРАБОТКИ СИГНАЛОВ AltBOC СО СПУТНИКОВ "ГАЛИЛЕО" | 2003 |
|
RU2339051C2 |
| УСТРОЙСТВО ДЛЯ ОДНОВРЕМЕННОГО ПРИЕМА СИГНАЛОВ РАЗЛИЧНЫХ СИСТЕМ СПУТНИКОВОЙ НАВИГАЦИИ | 2015 |
|
RU2611069C1 |
| СПОСОБ И УСТРОЙСТВО ПЕРЕДАЧИ СИГНАЛОВ | 2005 |
|
RU2383998C2 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ НАВИГАЦИОННЫХ СИГНАЛОВ ГЛОНАСС, GPS И ГАЛИЛЕО | 2010 |
|
RU2435307C1 |
| ПЕРЕДАТЧИК, ПРИЕМНИК, СИСТЕМА МОБИЛЬНОЙ СВЯЗИ И СПОСОБ ПЕРЕДАЧИ КАНАЛА СИНХРОНИЗАЦИИ | 2006 |
|
RU2414073C2 |
| УПЛОТНИТЕЛЬНЫЙ БОЛТ И СПОСОБ УСТАНОВКИ УПЛОТНИТЕЛЬНОГО БОЛТА | 2017 |
|
RU2713617C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ПЕРЕДАЧИ/ПРИЕМА КОНТРОЛЬНЫХ СИГНАЛОВ В СИСТЕМЕ СВЯЗИ, ИСПОЛЬЗУЮЩЕЙ СХЕМУ МУЛЬТИПЛЕКСИРОВАНИЯ С ОРТОГОНАЛЬНЫМ ЧАСТОТНЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 2005 |
|
RU2346394C2 |
| УСТРОЙСТВО И СПОСОБЫ СКОРОСТНОГО ОБНАРУЖЕНИЯ СИГНАЛОВ GPS | 2005 |
|
RU2360263C2 |
| Многочастотный приемник сигналов Глобальных Навигационных Спутниковых Систем | 2021 |
|
RU2787076C1 |
Изобретение относится к технике передачи данных и может использоваться в системах беспроводной связи. Технический результат состоит в повышении помехоустойчивости передачи данных. Для этого способ содержит этапы, на которых принимают первый сигнал радионавигации по меньшей мере от одного из множества передатчиков и получают из него первый OCM-сигнал SA, и принимают второй сигнал SВ, синхронно широковещательно передаваемый вместе с первым OCM-сигналом SA, причем второй сигнал SB имеет ту же самую или соседнюю центральную частоту относительно первого OCM-сигнала SA. Способ дополнительно содержит генерирование объединенного значения YC корреляции, причем объединенное значение YC корреляции соответствует корреляции объединенного сигнала SC с репликой первого OCM-сигнала и объединенный сигнал Sc получают в результате когерентного объединения на приемнике первого OCM-сигнала SA со вторым сигналом SB. Способ дополнительно содержит получение информации дальности, основываясь на объединенном значении YC корреляции. Второй сигнал SB может содержать (i) OCM-сигнал или (ii) сигнал BOC. Объединение двух сигнальных компонент может быть сделано перед или после операции корреляции. Когда такая технология принимается приемником дальности, она предлагает улучшенные характеристики в области захвата сигнала и повторного захвата сигнала на сопровождение, в частности снижение вероятности захвата на побочных пиках; точный захват и сопровождение: снижение или исключение вероятности ложного захвата кода. 4 н. и 16 з.п. ф-лы, 15 ил.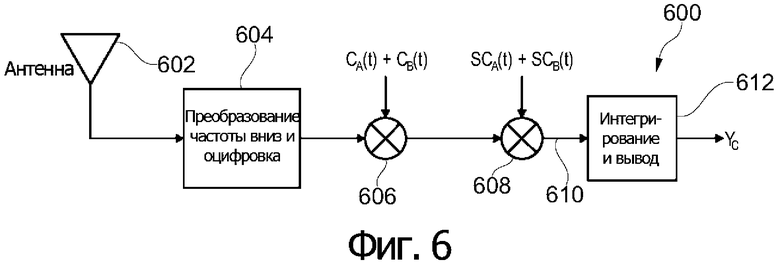
1. Способ обработки сигнала дальности с модулированной смещенной несущей (OCM) в системе радионавигации, содержащей множество установленных на спутниках передатчиков и по меньшей мере один наземный приемник, причем приемник выполнен с возможностью осуществления указанного способа, содержащего этапы, на которых:
принимают первый сигнал радионавигации по меньшей мере от одного из множества передатчиков и осуществляют преобразование с понижением частоты и оцифровку первого сигнал радионавигации для получения из него первого OCM-сигнала SA;
принимают второй сигнал SВ синхронно широковещательно передаваемый вместе с первым OCM-сигналом SA, причем второй сигнал SВ имеет соседнюю или ту же самую центральную частоту, что и первый OCM-сигнал SA;
осуществляют на приемнике когерентное объединение первого OCM-сигнала SA и второго сигнала SВ для получения объединенного сигнала SС;
генерируют объединенное корреляционное значение YC, причем объединенное корреляционное значение соответствует корреляции объединенного сигнала SC с репликой первого OCM-сигнала SA; и
получают информацию дальности на основе объединенного корреляционного значения YC.
2. Способ по п. 1, в котором центральная частота второго сигнала SB выбрана так, что спектральная плотность мощности (PSD) второго сигнала SB занимает ширину полосы, содержащуюся между двумя лепестками первого OCM-сигнала SA.
3. Способ по п. 1, в котором второй сигнал SВ (i) не имеет никакой поднесущей или (ii) имеет поднесущую SCВ, причем поднесущая SCВ имеет более низкую частоту, чем поднесущая SCA первого сигнала SA.
4. Способ по п. 3, в котором центральные частоты первого OCM-сигнала SA и второго сигнала SB удовлетворяют выражению:

где первый OCM-сигнал SA и второй сигнал SВ имеют центральные частоты 



5. Способ по п. 3, в котором центральные частоты первого OCM-сигнала SA и второго сигнала SB удовлетворяют выражению:

где первый OCM-сигнал SA и второй сигнал SВ имеют центральные частоты
6. Способ по любому из пп. 1-5, в котором второй сигнал SB содержит (i) OCM-сигнал или (ii) сигнал с двоичной смещенной несущей (BOC).
7. Способ по любому из пп. 1-6, в котором этап генерирования объединенного корреляционного значения YC содержит подэтапы, на которых:
когерентно объединяют первый OCM-сигнал SA со вторым сигналом SВ в соответствии с выражением
SC(t) = SA(t) + SB(t) и
генерируют, с использованием объединенной функции интегрирования и вывода, объединенное корреляционное значение YC из SC(t) (t) и локальной реплики.
8. Способ по любому из пп. 1-6, в котором второй сигнал SB содержит поднесущую SCВ, а этап генерирования объединенного значения YC корреляции содержит подэтапы, на которых:
генерируют, с использованием первой функции интегрирования и вывода, первое значение YА корреляции из первого OCM-сигнала SA(t) и первого сигнала локальной реплики первого OCM-сигнала согласно выражению:

где CA(t) - последовательность распространения CDMA, а SCA(t) - поднесущая первого OCM-сигнала SA;
генерируют, с использованием второй функции интегрирования и вывода, второе значение YB корреляции из SB(t) и сигнала локальной реплики второго сигнала согласно выражению:

где CB(t) - последовательность распространения CDMA, и SCВ(t) - поднесущая второго сигнала SВ; и
когерентно объединяют первое значение YA корреляции и второе значение YВ корреляции для генерирования объединенного значения YС корреляции.
9. Способ по любому из пп. 1-8, в котором этап генерирования объединенного значения YC корреляции содержит подэтап, на котором генерируют YC в виде взвешенной суммы:
где YA и YВ являются значениями корреляции, полученными из первого OCM-сигнала SA и второго сигнала SВ соответственно, и kA и kB являются весовыми коэффициентами.
10. Способ по любому из пп. 1-9, в котором второй сигнал SB содержит поднесущую SCВ, а этап генерирования объединенного значения YC корреляции содержит подэтап, на котором генерируют YC согласно следующему выражению:

где СА(t) - последовательность распространения CDMA, а SСА(t) - поднесущая первого OCM-сигнала SA;
где СB(t) - последовательность распространения CDMA, а SСB(t) - поднесущая второго сигнала SB; и
где kA и kB – весовые коэффициенты и kA + kB = l.
11. Способ по п. 9 или 10, в котором kA = kB.
12. Способ по п. 9 или 10, дополнительно содержащий этап, на котором:
обеспечивают модуль для генерирования на основе объединенного значения YC корреляции функции ошибки задержки кода; при этом
отношение kA : kB выбрано так, что график функции ошибки задержки кода имеет только одно пересечение нулевой линии с положительным наклоном.
13. Способ по п. 9 или 10, в котором kB > 20kA.
14. Способ по п. 9 или 10, дополнительно содержащий этапы, на которых:
используют приемник в первом режиме в течение первого периода, в котором отношение kA : kB варьируется, пока не удовлетворено условие, что график функции ошибки задержки кода, определяемый на основе объединенного значения YC корреляции, имеет только одно пересечение нулевой линии с положительным наклоном;
после того как условие удовлетворено, используют приемник во втором режиме, в который отношение kA : kB имеет заданное значение.
15. Способ по п. 14, в котором заданное значение расположено в диапазоне, определяемом от kA = kB до kA >> kB .
16. Способ по любому из пп. 9-14, в котором отношение kA : kB непрерывно меняется в ответ на факторы окружающей среды, факторы мощности сигнала и/или факторы динамики пользователя.
17. Способ по любому из пп. 1-16, в котором поднесущая SCA первого сигнала SA является прямоугольным сигналом, и/или по любому из пп. 3-16, в котором поднесущая SCВ второго сигнала SВ является прямоугольным сигналом.
18. Приемник для обработки сигнала дальности с модулированной смещенной несущей (OCM) в системе радионавигации, содержащей множество установленных на спутниках передатчиков и по меньшей мере один указанный наземный приемник, содержащий:
антенну для приема первого сигнала радионавигации по меньшей мере от одного из множества передатчиков и второго сигнала широковещаемого синхронизированно с первым сигналом радионавигации, при этом второй сигнал имеет соседнюю или ту же самую центральную частоту, что и первый сигнал радионавигации; и
схему обработки, соединенную с антенной и выполненную с возможностью приема первого радионавигационного сигнала и второго сигнала, причем схема обработки выполнена с возможностью осуществления способа по любому из пп. 1-17.
19. Записываемый, перезаписываемый или предназначенный для хранения носитель, на котором записываются или хранятся данные, определяемые или пригодные для преобразования в команды для исполнения схемой обработки, и соответствующие, по меньшей мере, этапам любого из пп. 1-17 приложенной формулы изобретения.
20. Серверный компьютер, содержащий устройство связи и устройство памяти и выполненный с возможностью передачи по запросу или как-либо иначе данных, определяемых или пригодных для преобразования в команды для исполнения схемой обработки и соответствующих по меньшей мере этапам п. 17.
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| СПОСОБ ОПЕРАТИВНОГО СОПРОВОЖДЕНИЯ И УПРАВЛЕНИЯ ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2273055C1 |
| СПОСОБ И СИСТЕМА ПОЗИЦИОНИРОВАНИЯ МОБИЛЬНОГО ТЕРМИНАЛА ВНУТРИ ЗДАНИЙ НА ОСНОВЕ ГЛОНАСС-ПОДОБНОГО СИГНАЛА | 2012 |
|
RU2533202C2 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |

