Предпосылки создания изобретения
Область техники
Изобретение в целом относится к приемникам глобальной навигационной спутниковой системы и, в частности, к приемникам, которые работают с сигналами, модулированными по схеме AltBOC, со спутников "Галилео".
Уровень техники
Приемники глобальной навигационной спутниковой системы, например приемники системы GPS, определяют свое глобальное местоположение на основании сигналов, получаемых от орбитальных GPS-спутников и других спутников. Например, спутники системы GPS передают сигналы с использованием двух несущих, а именно несущей L1 с частотой 1575,42 МГц и несущей L2 с частотой 1227,60 МГц. Каждая несущая модулируется по меньшей мере бинарным псевдослучайным кодом, состоящим из кажущихся случайными последовательностей единиц и нулей, которые периодически повторяются. Эти единицы и нули в псевдослучайном коде называются "элементами кода", а изменения кода от единицы к нулю или от нуля к единице, которые происходят с периодичностью элементов кода, называются "переключениями битов". Каждый GPS-спутник использует уникальный псевдослучайный код, и таким образом GPS-приемник может связать принятый сигнал с конкретным спутником, определив, какой псевдослучайный код введен в сигнал.
GPS-приемник вычисляет разность между временем, когда спутник передает свой сигнал, и временем, когда приемник принимает сигнал. Затем на основе указанной разности времени приемник вычисляет расстояние до спутника, или "псевдодальность". Используя псевдодальности, определенные для по меньшей мере четырех спутников, приемник определяет свое глобальное местоположение.
Для определения разности времени GPS-приемник синхронизирует локально генерируемый псевдослучайный код с псевдослучайным кодом в принятом сигнале путем совмещения элементов каждого из кодов. Затем GPS-приемник определяет, насколько локально генерируемый псевдослучайный код смещен во времени относительно известного времени передачи спутникового псевдослучайного кода, и вычисляет соответствующую псевдодальность. Чем ближе GPS-приемник совмещает локально-генерируемый псевдослучайный код с псевдослучайным кодом в принятом сигнале, тем точнее GPS-приемник может определить соответствующую разность времени и псевдодальность и, в свою очередь, свое глобальное местоположение.
Операции по синхронизации кодов включают обнаружение спутникового псевдослучайного кода и его отслеживание. Для обнаружения псевдослучайного кода GPS-приемник обычно делает ряд корреляционных измерений, которые разнесены во времени на длительность элемента кода. После обнаружения кода GPS-приемник отслеживает принимаемый код. Это обычно означает проведение корреляционных измерений "ранний-минус-поздний", то есть измерение разности между (i) измеренной корреляцией между псевдослучайным кодом в принятом сигнале и ранней версией локально-генерируемого псевдослучайного кода и (ii) измеренной корреляцией между псевдослучайным кодом в принятом сигнале и последней версией локального псевдослучайного кода. GPS-приемник использует измерения "ранний-минус-поздний" в контуре синхронизации по задержке (DLL), который генерирует сигнал ошибки, пропорциональный расхождению между локальным и принятым псевдослучайными кодами. Сигнал ошибки, в свою очередь, используется для управления генератором псевдослучайного кода, который сдвигает локальный псевдослучайный код так, чтобы по существу минимизировать сигнал ошибки.
Обычно GPS-приемник совмещает также спутниковую несущую с локальной несущей, используя корреляционные измерения, связанные с точечной версией локального псевдослучайного кода. Для этого приемник использует петлю фазовой синхронизации, обеспечивающую слежение за несущей.
GPS-приемник принимает спутниковые сигналы не только по траектории прямой видимости, или по прямому пути, но также и сигналы многолучевого распространения, идущие по различным путям и отражаемые в приемник от земли, поверхности воды, соседних зданий и т.д. Сигналы многолучевого распространения достигают GPS-приемника позже сигнала прямого распространения и суммируются с сигналом прямого распространения, приводя к формированию искаженного принимаемого сигнала. Это искажение принимаемого сигнала оказывает неблагоприятное влияние на операции по синхронизации кодов, поскольку корреляционные измерения, при которых измеряют корреляцию между локальным псевдослучайным кодом и принятым сигналом, базируются на полном принятом сигнале, включающем составляющие многолучевого распространения. Искажение может быть таким, что GPS-приемник попытается осуществить синхронизацию по сигналу многолучевого распространения вместо сигнала прямого распространения. В этом смысле особенно опасны сигналы многолучевого распространения, в которых переключения битов в коде происходят близко к моментам времени, в которые происходит изменение битов в коде сигнала прямого распространения.
Одним из способов обеспечения более точной синхронизации принимаемых и локально генерируемых псевдослучайных кодов состоит в использовании "узких корреляторов", как предложено в патентах США №5101416, 5390207 и 5495499, которые имеют общего заявителя и включены в настоящее описание путем ссылки. Было обнаружено, что сужение интервала задержки между ранним и поздним корреляционными измерениями существенно снижает неблагоприятное воздействие шума и искажений, вызванных многолучевостью, при измерениях типа "ранний-минус-поздний".
Интервал задержки уменьшают так, что шум коррелирует в ранних и поздних измерениях корреляции. Кроме того, интервал работы узких корреляторов находится существенно ближе к корреляционному пику, который соответствует точечным измерениям корреляции псевдослучайного кода, чем вклады от многих многолучевых сигналов. Соответственно, корреляционные измерения "ранний-минус-поздний", выполненные этими корреляторами, оказываются значительно менее искаженными, чем выполненные с большим интервалом вокруг пика. Чем ближе корреляторы к пику корреляции, тем больше удается ослабить неблагоприятное влияние многолучевости на корреляционные измерения. Однако интервал задержки нельзя сделать слишком узким, так как в этом случае контур синхронизации по задержке не сможет захватить псевдослучайный код спутника и затем поддерживать синхронизацию кода. В противном же случае приемник не сможет отслеживать псевдослучайный код в принятом сигнале без неоднократной затраты времени на повторный захват кода.
Несущая L1 модулируется двумя псевдослучайными кодами, а именно: С/А-кодом с частотой 1,023 МГц и Р-кодом с частотой 10,23 МГц. Несущая L2 модулируется Р-кодом. Обычно GPS-приемник, созданный в соответствии с вышеупомянутыми патентами, обнаруживает спутниковый сигнал, используя локально генерируемый С/А-код и локально генерируемую несущую L1. После обнаружения приемник синхронизирует локально генерируемый С/А-код и несущую L1 с С/А-кодом и несущей L1 в принимаемом сигнале с использованием узких корреляторов в контуре синхронизации по задержке и точечного коррелятора в петле слежения за несущей. Затем приемник может использовать информацию слежения за С/А-кодом, чтобы отслеживать Р-коды несущих L1 и/или L2, которые имеют известные временные соотношения с С/А-кодом и друг с другом.
В более позднем поколении GPS-спутников несущая L2 также модулируется С/А-кодом, то есть в свою очередь модулируется прямоугольным сигналом с частотой 10,23 МГц. С/А-код с прямоугольной модуляцией, который ниже мы будем называть "расщепленным С/А-кодом", имеет в своем энергетическом спектре максимумы со смещением ±10 МГц относительно несущей L2, или в нулях энергетического спектра Р-кода. Расщепленный С/А-код может, таким образом, быть избирательно подавлен без подавления Р-кода несущей L2.
Автокорреляционная функция, связанная с расщепленным С/А-кодом, имеет огибающую, которая соответствует автокорреляции С/А-кода с частотой 1,023 МГц, и множество пиков в пределах огибающей, которая соответствуют автокорреляции прямоугольного сигнала с частотой 10,23 МГц. Таким образом, имеется 20 пиков в пределах огибающей С/А-кода с двумя элементами кода, или пик автокорреляции прямоугольного сигнала через каждые 0,1 элемента С/А-кода. Каждый из множества пиков, связанных с прямоугольным сигналом, является относительно узким, что обеспечивает повышенную точность слежения за кодом, в предположении, что контур синхронизации по задержке отслеживает правильный узкий пик.
Как отмечается в патенте США №6184822, который принадлежит тому же заявителю и включен в настоящее описание путем ссылки, имеются преимущества в обнаружении и отслеживании расщепленного С/А-кода путем раздельного совмещения в принятом сигнале фазы локально генерируемого прямоугольного сигнала с частотой 10,23 МГц, который можно рассматривать как прямоугольный код с частотой 20,46 МГц, и локально генерируемого С/А-кода с частотой 1,023 МГц. Приемник сначала совмещает фазу локально генерируемого прямоугольного кода с принятым сигналом и отслеживает один из множества пиков автокорреляционной функции расщепленного С/А-кода. Затем он сдвигает фазу локально генерируемого С/А-кода относительно фазы локально генерируемого прямоугольного кода, совмещая локальный и принятый С/А-коды, и позиционирует корреляторы на центральном пике расщепленного С/А-кода. Затем приемник непосредственно отслеживает центральный пик с помощью локально генерируемого расщепленного С/А-кода.
Европейская комиссия и Европейское космическое агентство развивают глобальную навигационную спутниковую систему (GNSS), названную "Галилео". Спутники системы "Галилео" передают сигналы в полосе Е5а (1176,45 МГц) и полосе Е5b (1207,14 МГц) в виде составного сигнала с центральной частотой 1195,795 МГц с использованием предложенной модуляции, известной как альтернативная бинарная смещенная несущая (Alternate Binary Offset Carrier - AltBOC). Генерация сигнала AltBOC описана в документе "Technical Annex to Galileo SRD Signal Plans", Draft 1, 18 July 2001, ref# STF-annexSRD-2001/003, который полностью включен в настоящее описание путем ссылки. Как и спутники системы GPS, каждый спутник системы GNSS передает уникальные псевдослучайные коды, и GNSS-приемник может, таким образом, связать принятый сигнал с конкретным спутником. Соответственно, GNSS-приемник определяет соответствующую псевдодальность на основе разности между временем, когда спутники передают сигналы, и временем, когда приемник принимает сигналы AltBOC.
При обычной модуляции по схеме бинарной смещенной несущей (Binary Offset Carrier - ВОС) сигнал во временной области модулируется синусоидальным сигналом sin(ω0t), что сдвигает частоту сигнала как в верхнюю боковую полосу, так и в соответствующую нижнюю боковую полосу. Модуляция ВОС обеспечивает частотный сдвиг с использованием прямоугольного сигнала, или sign(sin(ω0t)), и обычно обозначается как ВОС (fs, fc), где fs - частота поднесущей (прямоугольный сигнал) и fc - скорость передачи элементов кода. Обычно для простоты в обозначениях множители 1,023 МГц опускают и поэтому вместо ВОС (15,345 МГц, 10,23 МГц) пишут ВОС (15, 10). Модуляция ВОС, которая создает, например, сигналы, аналогичные расщепленному С/А-коду, который рассматривался выше, позволяет использовать одинаковый расширяющий, или псевдослучайный, код на каждой из синфазной и квадратурной несущих.
Модуляция сигнала во временной области комплексной экспонентой exp(ω0t) сдвигает частоту сигнала только в верхнюю боковую полосу. Цель модуляции AltBOC состоит в том, чтобы когерентно генерировать полосы Е5а и Е5b, или поднесущие, которые соответственно модулируются комплексными экспонентами, так что сигналы могут быть приняты в виде широкополосного "ВОС-подобного" сигнала. Каждая из полос Е5а и Е5b имеет синфазный или квадратурный расширяющий, или псевдослучайный, код, при этом коды Е5а сдвинуты в нижнюю боковую полосу, а коды Е5b сдвинуты в верхнюю боковую полосу. Соответствующие квадратурные несущие Е5а и Е5b модулируются пилотными сигналами без данных, а соответствующие синфазные несущие модулируются как псевдослучайными кодами, так и сигналами данных. GNSS-приемник может отслеживать коды Е5а или коды Е5b аналогично отслеживанию расщепленного С/А-кода, рассмотренного выше.
Однако имеются преимущества как в ослаблении влияния многолучевости, так и в точности отслеживания составных сигналов Е5а и E5b, то есть отслеживания широкополосного когерентного сигнала AltBOC. Соответствующие синфазные и квадратурные несущие составного сигнала модулированы комплексными расширяющими кодами, и таким образом каждый из синфазного и квадратурного каналов включает вклады как от действительных, так и от мнимых составляющих кодов Е5а и E5b. Теоретический анализ операций по слежению за составными сигналами проводился с использованием высшей математики. Поэтому можно ожидать, что соответствующие приемники, которые по существу воспроизводят операции высшей математики, будут сложными и дорогостоящими.
Один из предложенных приемников генерирует локальные версии составных кодов AltBOC с использованием те же самых таблиц преобразований, которые используются спутниками системы "Галилео" для генерации передаваемых сигналов, то есть таблиц, которые соответствуют базовым расширяющим кодам фазовой манипуляции. Таким образом, предложенный приемник должен не только хранить большие таблицы для каждого из кодов, передаваемых соответствующими спутниками системы "Галилео", но должен также иметь сложные электрические цепи, которые управляют обращением к таблицам преобразований каждый раз при приеме нового кодового элемента. Таблицы становятся еще более громоздкими, а обращение к ним еще более усложняется при использовании разных пилотных кодов в полосах Е5а и E5b, как будет рассмотрено ниже.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Изобретение относится к GNSS-приемнику, который отслеживает коды AltBOC (15, 10), или составные коды Е5а и E5b, с использованием оборудования, которое локально генерирует комплексный составной сигнал путем комбинирования отдельно генерируемых действительной и мнимой составляющих комплексного сигнала. Например, для отслеживания составных пилотных сигналов, не несущих данных и передаваемых в квадратурном канале сигнала AltBOC, приемник вырабатывает локальную версию составного пилотного кода в виде комбинации локально генерируемых действительной и мнимой составляющих пилотного сигнала. Таким образом, приемник управляет генераторами псевдослучайного кода, которые производят копию псевдослучайных кодов Е5а и E5b, и генераторами прямоугольного сигнала, которые генерируют действительную и мнимую составляющие верхней и нижней поднесущих.
Приемник удаляет комплексный составной код из принятого сигнала, умножая принятый сигнал, который был преобразован с понижением частоты с получением составляющих I и Q сигнала в основной полосе частот, на локально генерируемый составной код. Затем приемник использует результаты, которые представляют собой коррелированные мгновенные значения сигналов 1 и Q, для оценки ошибки отслеживания фазы центральной несущей. Сигнал ошибки используется для управления генератором с цифровым управлением (NCO), который работает обычным образом, с целью коррекции фазы локально генерируемой центральной несущей. Кроме того, приемник использует раннюю и позднюю версии локально генерируемого комплексного составного пилотного кода в контуре синхронизации по задержке и совмещает локально генерируемый составной пилотный код с принятым составным пилотным кодом путем минимизации соответствующего сигнала ошибки в контуре синхронизации по задержке.
Когда приемник отслеживает составной пилотный код, он обычным образом определяют псевдодальность и свое глобальное местоположение. Затем, как более подробно рассматривается ниже, приемник использует отдельный набор корреляторов для совмещения локально генерируемых версий синфазных составных псевдослучайных кодов с кодами синфазного канала в принятом сигнале, а затем восстанавливает модулирующие данные.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Ниже описание сопровождается ссылками на чертежи, где:
на фиг.1 изображен частотный спектр последовательности квадратурного канала AltBOC (15, 10);
на фиг.2 изображена нормированная автокорреляционная функция сигнала, изображенного на фиг.1;
на фиг.3 показана блок-схема одного канала GNSS-приемника;
на фиг.4 показана блок-схема локального генератора кода, который входит в состав приемника, показанного на фиг.3,
на фиг.5 показана блок-схема корреляционной подсистемы, которая входит в состав приемника, показанного на фиг.4;
на фиг.6 изображена автокорреляционная функция для синфазного канала AltBOC;
на фиг.7 показана диаграмма идеализированных значений автокорреляции;
на фиг.8 изображена другая автокорреляционная функция для синфазного канала AltBOC;
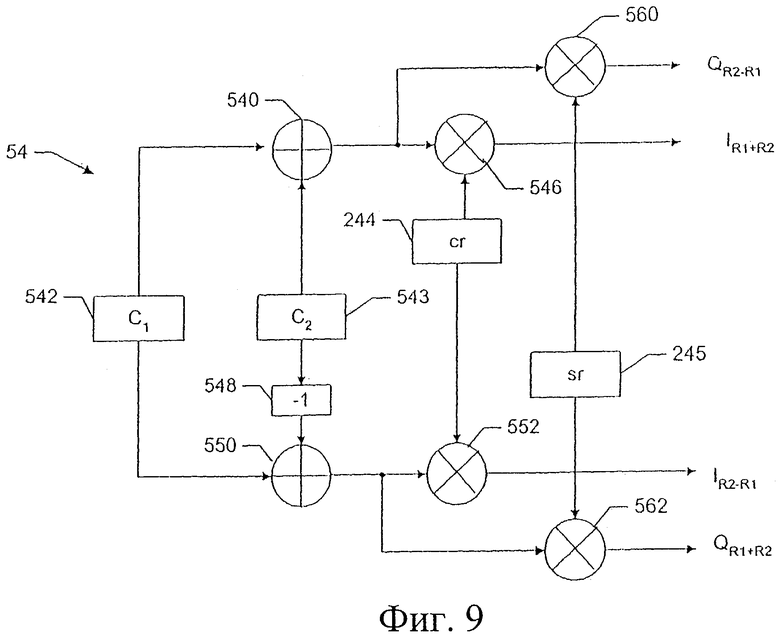
на фиг.9 показана блок-схема локального генератора кода;
на фиг.10 показана блок-схема корреляционной подсистемы и
на фиг.11 показана блок-схема, объединяющая корреляционные подсистемы, изображенные на фиг.5 и 10.
ПОДРОБНОЕ ОПИСАНИЕ ПРИМЕРА ВЫПОЛНЕНИЯ ИЗОБРЕТЕНИЯ
Схема модуляции AltBOC системы "Галилео" генерирует сигнал AltBOC (15, 10), который является сигналом, подобным сигналу ВОС (15, 10), с полосами Е5а и Е5b, имеющими соответствующие собственные расширяющие, или псевдослучайные, коды, на их синфазной и квадратурной несущих. Сигнал AltBOC (15, 10) имеет центральную частоту несущей 1191,795 МГц и частоту поднесущей 15,345 МГц, с полосой Е5а (1176,45 МГц) в качестве нижней боковой и полосой Е5Ь (1207,14 МГц) в качестве верхней боковой полосы.
Сигнал AltBOC (15, 10) генерируется на спутнике как сигнал с постоянный огибающей, который включает в синфазном канале композицию расширяющих, или псевдослучайных, кодов Е5а и Е5b и данных, а в квадратурном канале - композицию псевдослучайных кодов Е5а и Е5b без данных, или пилотных кодов. На фиг.1 изображен частотный спектр псевдослучайной последовательности квадратурного канала AltBOC.
Идеализированная нормированная автокорреляционная функция сигнала AltBOC (15, 10) показана на фиг.2. Огибающая 100 автокорреляционной функции 111 представляет собой автокорреляционную функцию сигнала со скоростью передачи элементов кода 10,23 МГц, а множество пиков автокорреляционной функции 111 связано с поднесущей 15,3454 МГц, которую можно рассматривать как комплексный код в виде прямоугольного сигнала.
Ниже рассматривается работа GNSS-приемника 10 при отслеживании сигналов AltBOC (15, 10), поступающих со спутника системы "Галилео". В разделе 1 рассматриваются операции по отслеживанию квадратурных пилотных кодов без данных как составных кодов. В разделе 2 рассматриваются операции по восстановлению данных Е5а и Е5b из синфазных составных кодов данных. При этом предполагается, что приемник захватил несущую с центральной частотой с использованием обычной петли слежения за несущей (не показана).
Раздел 1. Отслеживание составного пилотного кода
Сигнал AltBOC задается выражением

где c1 - синфазный код E5b, c2 - синфазный код Е5а, c3 - квадратурный код E5b и c4 - квадратурный код Е5а, а расширяющие коды E5b и Е5а модулируют соответственно верхнюю несущую er(t) и нижнюю несущую er*(t), которая комплексно сопряжена с er(t). Верхняя несущая er(t) определяется выражением
er(t)=cr(t)+j-sr(t),
где cr(t)=sign(cos(2πfst)), sr(t)=sign(sin(2πfst)) и fs - частота поднесущей. Нижняя несущая er*(t) определяется выражением
er*(t)=cr(t)-j·sr(t).
Составной пилотный код в квадратурном канале сигнала AltBOC (15, 10) включает квадратурные коды c4(t) и c3(t) для Е5а и E5b. Выражение xq(t) для сигнала квадратурного канала получается из уравнения (1) путем приравнивания нулю кодов синфазного канала и подстановки выражений для несущих:

Члены уравнения (2) можно разделить на действительную и мнимую составляющие:

Приемник создает локальную версию комплексного составного пилотного кода путем комбинирования локально генерируемых действительной и мнимой составляющих сигнала, как объясняется более подробно со ссылкой на фиг.4. Затем приемник вычисляет корреляцию локально генерируемого составного пилотного кода с соответствующим составным пилотным кодом в принятом сигнале, как более подробно объясняется ниже со ссылкой на фиг.5. Затем приемник обычным способом определяет соответствующие псевдодальности и свое глобальное местоположение.
Обратимся к фиг.3. GNSS-приемник 10 принимает с помощью антенны 12 сигнал, который включает составные коды AltBOC, передаваемые всеми спутниками, находящимися в зоне видимости. Принятый сигнал поступает в понижающий преобразователь 14 частоты, который обычным образом преобразует принятый сигнал в сигнал промежуточной частоты, частота которого совместима с аналого-цифровым преобразователем 18.
Затем сигнал промежуточной частоты подают в полосовой фильтр 16 промежуточной частоты, который имеет полосу пропускания в области желаемой центральной несущей. Ширина полосы фильтра 16 должна быть достаточно большой, чтобы смогла пройти основная гармоника составного пилотного кода AltBOC, или приблизительно 1192 МГц. Широкая полоса пропускания обеспечивает относительно острую характеристику переключения битов в принятом коде и, таким образом, достаточно хорошо выраженные пики корреляции.
Аналого-цифровой преобразователь 18 формирует отсчеты отфильтрованных сигналов промежуточной частоты с частотой, которая удовлетворяет теореме Найквиста, и известным способом формирует соответствующие отсчеты цифровых синфазного (I) и квадратурного (Q) сигналов. Отсчеты цифровых сигналов I и Q подаются в процессор 20 для исключения эффекта Доплера, который работает известным образом и вырабатывает отсчеты Ibaseband и Qbaseband в основной полосе частот путем вращения фазы сигналов в соответствии с оценкой фазового угла центральной несущей. Оценка фазового угла несущей частично основана на сигналах, вырабатываемых генератором 30 несущей с цифровым управлением, который подстраивается в соответствии с сигналами отслеживания ошибки фазы несущей, вырабатываемыми корреляционной подсистемой 22. Работа корреляционной подсистемы рассматривается ниже со ссылкой на фиг.5.
Затем отсчеты Ibaseband и Qbaseband подаются в корреляционную подсистему 22, которая измеряет корреляцию путем умножения отсчетов на раннюю, мгновенную и позднюю или раннюю-минус-позднюю версии локально генерируемых составных пилотных кодов, формируемых генератором 24 составного кода. Работа генератора составного кода и корреляционной подсистемы рассматривается ниже со ссылками на фиг.4 и 5 соответственно. Результаты измерения корреляции I и Q, связанные с ранней, мгновенной и поздней или ранней-минус-поздней версиями локального составного пилотного кода, подаются в схему 26 интегрирования и вывода, которая по отдельности накапливает соответствующие данные измерений I и Q в течение заданных интервалов. В конце каждого интервала схема 26 интегрирования и вывода выдает соответствующие накопленные данные I и Q, то есть корреляционные сигналы I и Q, в контроллер 40. Затем контроллер управляет генератором 30 с цифровым управлением и генератором 24 составного кода для совмещения локально генерируемого составного пилотного кода с соответствующим составным кодом в принятом сигнале.
GNSS-приемник 10 отслеживает сигналы AltBOC (15, 10) с использованием локально генерируемого составного пилотного кода, который сформирован из локально генерируемых действительной и мнимой составляющих составного сигнала. Ниже со ссылкой на фиг.4 рассмотрена работа генератора 24 составного кода по формированию локально генерируемых составляющих составного пилотного кода.
Генератор 24 составного кода содержит генераторы 242 и 243 псевдослучайных кодов c3 и c4, которые соответственно вырабатывают локальные версии псевдослучайного кода Е5а и Е5b для данного GNSS-спутника. Кроме того, генератор 24 составного кода содержит два генератора 244 и 245 прямоугольных сигналов, которые вырабатывают значения cr и sr, соответствующие действительной и мнимой составляющим верхней и нижней несущих er(t) и er*(t). Как более подробно объясняется ниже со ссылкой на фиг.5, контроллер использует корреляционные сигналы для управления относительным временем формирования локально генерируемых элементов кода c3 и c4 и фронтов прямоугольных сигналов cr и sr, которые можно рассматривать как соответствующие кодовые комбинации 0, 1, 0,..., и т.д.
Генератор 24 составного кода складывает кодовые элементы c3 и c4 в сумматоре 240 и умножает сумму в перемножителе 246 на величину cr, которая равна sign(cos(πfst)), для формирования действительной составляющей локально генерируемого составного пилотного кода. Действительная составляющая составного пилотного кода в дальнейшем обозначается "Ipiiot". Генератор составного кода формирует мнимую составляющую составного пилотного кода путем инвертирования кодовых элементов c3 в инверторе 248, сложения инвертированного кодового элемента c3 с соответствующим кодовым элементом c4 в сумматоре 250 и умножения результата в перемножителе 252 на величину sr, которая равна sign(sin(πfst)). Мнимая составляющая локально генерируемого составного пилотного кода в дальнейшем обозначается "Qpiiot". Локальная копия составного пилотного кода представляет собой сумму:

Как более подробно объясняется ниже, корреляционная подсистема 22 умножает принятый составной пилотный код на локально генерируемый составной пилотный код. На основе полученных результатов контроллер 40 управляет работой генераторов 242-245 псевдослучайного кода и прямоугольного сигнала, совмещая локальный код с принятым кодом.
Обратимся к фиг.5. Работа корреляционной подсистемы 22 поясняется на операциях, использующих мгновенную версию локально генерируемого составного пилотного кода. Приемник содержит аналогичные схемы для ранней и поздней или ранней-минус-поздней версий локально генерируемого составного пилотного кода, которые действуют как часть контура синхронизации по задержке, работающего известным образом для формирования соответствующего сигнала ошибки.
Корреляционная подсистема 22 перемножает два комплексных сигнала, а именно локально генерируемый составной пилотный код и принятый составной сигнал. Таким образом, корреляционная подсистема выполняет операцию:
ycorrelated(t)=(Ibaseband+j·Qbaseband)·(Ipilot-j·Qpilot).
Умножение и разделение действительной и мнимой составляющих дает сигнал корреляции:
ycorrelated(t)=(Ibaseband·Ipilot+Qbaseband·Qpilot)+j·(Qbaseband·Ipilot+Ibaseband·Qpilot).
Как показано на фиг.5, корреляционная подсистема манипулирует сигналами Ibaseband и Qbaseband основной полосы частот, выдаваемыми процессором 20 устранения эффекта Доплера, и локально генерируемыми действительной и мнимой составляющими сигнала Ipilot и Qpilot, выдаваемыми генератором 24 кода, и в результате вырабатывает действительную и мнимую составляющие сигнала корреляции. Корреляционная подсистема 22 умножает сигнал Ibaseband на сигнал Ipiiot в перемножителе 502, а сигнал Qbaseband на сигнал Qpiiot в перемножителе 510, затем сумматор 506 складывает эти два произведения и выдает результат в схему 516 интегрирования и вывода. Схема 516 интегрирования и вывода накапливает суммы, выдаваемые сумматором 506, и в нужные моменты времени вырабатывает соответствующую действительную составляющую, или сигнал Iprompt. Для формирования мнимой составляющей корреляционная подсистема умножает сигнал Qbaseband на сигнал Ipiiot в перемножителе 508, а сигнал Ibaseband - на сигнал Qpiiot в перемножителе 504. Произведение, сформированное в перемножителе 504, инвертируется инвертором 512 и в сумматоре 514 складывается с произведением, сформированным в перемножителе 508. Сумматор 514 выдает суммы в схему 518 интегрирования и вывода, которая накапливает суммы и в нужные моменты времени вырабатывает соответствующий сигнал Qprompt.
Контроллер 40 (фиг.3) манипулирует сигналами Iprompt и Qprompt, определяя ошибку слежения за фазой центральной несущей как арктангенс Qprompt/Iprompt. Затем сигнал фазовой ошибки используется известным образом для управления генератором 30 с цифровым управлением, который в свою очередь управляет процессором 20 устранения эффекта Доплера.
Как отмечалось выше, контроллер 40 получает также ранний и поздний или "ранний-минус-поздний" корреляционные сигналы I и Q. На основе этих сигналов контроллер 40 управляет работой генераторов 242-245, совмещая локальный составной код с принятым кодом и таким образом минимизируя соответствующий сигнал ошибки контура синхронизации по задержке.
Раздел 2. Восстановление данных из составных синфазных сигналов
Сигналы AltBOC (15, 10) включают как данные, так и расширяющие коды в синфазном канале Е5а и синфазном канале Е5b. Синфазный канал Е5а переносит данные, которые передаются с определенной скоростью передачи данных, а синфазный Е5b канал переносит другие данные, которые передаются с другой скоростью передачи данных. Однако переключения битов данных в синфазных каналах Е5а и Е5b происходят в соответствующие моменты времени. GNSS-приемник 10 получает и отслеживает сигнал AltBOC (15, 10) с использованием составного пилотного кода, как описывалось выше. После удаления несущей приемник восстанавливает данные из составного синфазного сигнала с использованием отдельного набора корреляторов, как более подробно объясняется ниже со ссылкой на фиг.10.
Комплексный синфазный сигнал AltBOC (15, 10) в основной полосе частот, то есть сигнал с квадратурными пилотными кодами, установленными в нуль, равен:

где поднесущая включена в выражение как синусоида вместо соответствующих прямоугольных функций cr(t)±sr(t), и на данный момент предполагается, что c1(t) и c2(t) не содержат данных. Отметим, что член  аналогичен выражению для квадратурных расширяющих псевдослучайных кодов, рассмотренных выше в разделе 1.
аналогичен выражению для квадратурных расширяющих псевдослучайных кодов, рассмотренных выше в разделе 1.
Если синфазный сигнал основной полосы частот коррелирован с локальной копией составного синфазного расширяющего кода, то результат имеет вид:

После перемножения членов:

где Rk обозначает автокорреляционную функцию для сигнала k. Перекрестные члены будут отфильтрованы на интервале до детектирования, в частности, потому что синфазные расширяющие коды Е5а и Е5b сформированы так, что имеют низкую взаимную корреляцию. Удаляя перекрестные члены и развертывая комплексные экспоненты, имеем:

В случае сигналов без данных автокорреляционные функции R1 и R2 равны, и выражение упрощается:

Соответствующая корреляционная функция изображена на фиг.6. Следует отметить, что она аналогична корреляционной функции составного квадратурного пилотного кода, которая изображена на фиг.2.
Если отказаться от предположения, что синфазные Е5а и Е5b коды c1(t) и c2(t) не содержат данных, максимальные нормированные идеальные значения отдельных корреляционных функций R1 и R2, и их суммы и разности показаны в таблице на фиг.7. Соответственно, первоначальную последовательность данных можно восстановить, если приемник восстанавливает как (R1+R2), так и (R2-R1) из составного синфазного сигнала.
Приемник может восстанавливать данные (R1+R2) непосредственно из синфазного сигнала Iprompt. Однако восстановление данных (R2-R1) не является столь простым. Как показано на фиг.6, составляющая R1+R2 синфазного составного сигнала, а именно, (R1(τ)+R2(τ))-cos(2πfst), имеет автокорреляционную функцию, которая аналогична автокорреляционной функции составного сигнала квадратурного канала. Однако, как показано на фиг.8, составляющая R1-R2 синфазного составного сигнала j·(R2(τ)-R1(τ))·sin(2πfst) не имеет аналогичной автокорреляционной функции, поскольку член с синусом при стремлении τ к нулю сам стремится к нулю.
Для компенсации обнуления члена с синусом при стремлении τ к нулю операцию корреляции можно сдвинуть, чтобы операция отслеживала пик корреляции, который соответствует j·(R2(τ)-R1(τ))·sin(2πfst), и тогда последовательность данных (R2-R1) можно считывать из коррелятора Qprompt, но с меньшей энергией.
Альтернативно, электрическая схема, которая генерирует локальную версию составного сигнала, может вместо этого генерировать сигнал, который формирует для члена (R2-R1) автокорреляционную функцию (R2(τ)-R1(τ))·cos(2πfst). Таким образом, локальный синфазный составной сигнал принимает вид:

Чтобы демодулировать данные с использованием этого способа, приемник локально формирует две комбинации расширяющих кодов c1(t) и c2(t), а именно комбинации, которые соответствуют данным R1+R2 и данным R2-R1 соответственно. Для восстановления данных (R1+R2) приемник создает локальный сигнал:

Для восстановления данных (R2-R1) приемник создает локальный сигнал:

Обратимся к фиг.9. Действительная и мнимая составляющие комбинаций R2-R1 и R1+R2 формируются локально генератором 54 кода, который может входить в состав локального генератора 24 составного кода (фиг.3). Для выработки действительной составляющей комбинации R1+R2 генератор кода складывает коды c1 и c2 в сумматоре 540 и умножает результат на код cr в виде прямоугольного сигнала в перемножителе 546. Для выработки мнимой составляющей комбинации R1+R2 генератор кода складывает код c1 и инвертированный код c2 в сумматоре 550 и умножает результат на код sr в виде прямоугольного сигнала в перемножителе 562. Генератор также умножает сумму c1+c2, полученную в сумматоре 540, на код sr в виде прямоугольного сигнала в перемножителе 560 с формированием мнимой составляющей комбинации R2-R1. Для формирования действительной составляющей комбинации R2-R1 генератор умножает сумму c1-c2, полученную в сумматоре 550, на код cr в виде прямоугольного сигнала в перемножителе 522.
Затем приемник использует локально сформированные действительную и мнимую составляющие комбинаций R1+R2 и R2-R1 для восстановления данных из составного синфазного кода.
Обратимся к фиг.10. Система умножает синфазный сигнал основной полосы частот Ibaseband на действительную составляющую R1+R2 в перемножителе 602, а квадратурный сигнал основной полосы частот Qbaseband на мнимую составляющую R1+R2 в перемножителе 606. Произведения, полученные в перемножителях 602 и 606, складываются в сумматоре 608, и сумма подается в схему 615 интегрирования и вывода. Для формирования сигнала корреляции, относящегося к R1-R2, корреляционная подсистема умножает квадратурный сигнал основной полосы частот Qbaseband на мнимую составляющую R2-R1 в перемножителе 610. Затем система умножает действительную составляющую сигнала основной полосы частот Ibaseband на действительную составляющую R2-R1 в перемножителе 604. Обе суммы складываются в сумматоре 612 и подаются в схему 616 интегрирования и вывода. Схемы 615 и 616 интегрирования и вывода накапливают корреляционные значения, сформированные сумматорами 608 и 612 соответственно, и в нужное время формируют сигналы R1+R2prompt и R1-R2prompt. Затем эти результаты используются для восстановления данных в соответствии с таблицей, показанной на фиг.7.
Схемы, показанные на фиг.5 и 10, можно объединить, как показано на фиг.11, для создания системы, которая отслеживает квадратурный составной код AltBOC и восстанавливает данные Е5а и Е5b из синфазного составного кода AltBOC.









Изобретение относится к приемникам глобальной навигационной спутниковой системы, в частности тем, что работают с сигналами, модулированными по схеме AltBOC. Приемник содержит: локальный генератор (24) составного кода для генерирования действительной и мнимой составляющих локальной версии составного кода AltBOC. Составляющие получают путем комбинирования локально генерируемых кодов (с3, с4) с действительной и мнимой составляющими (cr, sr) верхней и нижней поднесущих; корреляционную подсистему (22, 26) для формирования сигналов корреляции как результата определения корреляции между локально генерируемым составным кодом и составным кодом в принятом сигнале AltBOC. Корреляцию получают путем комбинирования произведений, полученных при умножении синфазной и квадратурной составляющих принятого в основной полосе частот сигнала на локально генерируемые составляющие составного кода; и контроллер (40) для управления локальным генератором составного кода так, чтобы совместить локальный составной код с соответствующим составным кодом в принятом сигнале AltBOC на основе сигналов корреляции. Контроллер определяет глобальное местоположение на основании разности между моментами времени, в которые были переданы составные коды AltBOC, и моментами времени приема этих кодов. 2 н. и 9 з.п. ф-лы, 11 ил.
| F.Bastide et all | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| PROCEEDINGS OF THE INSTITUTE OF NAVIGATION (ION), GPS | |||
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
| ПРИЕМНИК СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1997 |
|
RU2118054C1 |
| ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2000 |
|
RU2178894C1 |
| US 6184822 B1, 06.02.2001 | |||
| Механизм подачи | 1986 |
|
SU1315308A1 |

