Перекрестная ссылка
[0001] Настоящая заявка заявляет приоритет предварительной заявки США 62/155039, поданной 30 апреля 2015 г., которая целиком включена в настоящее изобретение посредством ссылки.
Область техники, к которой относится изобретение
[0002] Настоящее изобретение относится к способу для торможения двигателем транспортного средства, оснащенного бесступенчатой трансмиссией.
Уровень техники
[0003] В колесных транспортных средствах, приводимых в движение двигателем внутреннего сгорания, когда водитель отпускает орган управления дроссельной, заслонкой например, педаль газа, клапан регулятора почти полностью закрывается. В результате в двигатель может подаваться очень мало воздуха. Когда это происходит, если транспортное средство находится в движении и двигатель все еще соединен с колесами, колеса стремятся вращать коленчатый вал двигателя со скоростью, соответствующей скорости, которая необходима для движения транспортного средства со скоростью, которой последнее обладает в текущий момент времени. Однако, из-за положения клапана регулятора в двигателе создается разрежение, и крутящий момент, прикладываемый к коленчатому валу со стороны колес, вынужден работать против указанного разрежения. В результате двигатель вызывает замедление транспортного средства, или, в случае, если транспортное средство движется под уклон, по меньшей мере уменьшает ускорение транспортного средства. Этот эффект называют торможением двигателем.
[0004] Одно из основных преимуществ торможения двигателем заключается в том, что, помогая уменьшить скорость транспортного средства, такое торможение помогает уменьшить износ тормозов, которые обычно используются для торможения колес.
[0005] Определенные транспортные средства оснащают бесступенчатой трансмиссией (БСТ) для передачи крутящего момента от двигателя к колесам. БСТ содержит ведущий шкив, ведомый шкив и ремень, обернутый вокруг шкивов для передачи крутящего момента между шкивами. В большинстве ситуаций для транспортного средства с БСТ отпускание водителем педали газа будет приводить к торможению двигателем.
[0006] Однако, некоторые БСТ содержат ведущий шкив, управляемый центробежной силой (центробежный ведущий шкив). Центробежные ведущие шкивы содержат пару щек, которые сближаются, когда скорость ведущего шкива возрастает. В сущности, в некоторых центробежных ведущих шкивах, при малых оборотах ведущего шкива его щеки расположены слишком далеко друг от друга, чтобы зажимать между собой приводной ремень. Поэтому, отпускание педали газа, когда обороты ведущего шкива низкие, не приводило бы к торможению двигателем, поскольку ремень вращался бы свободно относительно ведущего шкива, при этом вращение колес и ведомого шкива не встречало бы сопротивления со стороны двигателя. Это происходило бы, например, когда транспортное средство начинает движение под уклон при работе двигателя на холостом ходу.
[0007] Чтобы решить эту проблему, некоторые центробежные ведущие шкивы оснащают муфтой или иным механизмом, чтобы заставить ремень передавать крутящий момент на коленчатый вал двигателя, если ремень вращается свободно относительно ведущего шкива. Согласно одному примеру, ведущий шкив оснащают обгонной муфтой, которая заставляет ремень прикладывать момент к коленчатому валу, если ремень вращается относительно коленчатого вала/ведущего шкива со скоростью, превышающей определенную скорость. Когда обгонную муфту сцепляют, включается торможение двигателем.
[0008] Хотя указанные механизмы и решают проблему двигателя, не создающего торможения при определенных условиях, они также увеличивают стоимость, вес и сложность двигателя.
[0009] Поэтому, было бы желательно найти решение проблемы транспортных средств, оснащенных БСТ с центробежным ведущим шкивом, которые не обеспечивают торможение двигателем при определенных условиях.
Сущность изобретения
[0010] Задачей настоящего изобретения является устранение по меньшей мере некоторых недостатков, свойственных существующему уровню техники.
[0011] Согласно настоящему изобретению в его первом аспекте, предлагается способ управления двигателем внутреннего сгорания транспортного средства. Транспортное средство содержит двигатель внутреннего сгорания и бесступенчатую трансмиссию (БСТ). БСТ содержит ведущий шкив, функционально связанный с двигателем, ведомый шкив и ремень, обернутый вокруг ведущего и ведомого шкивов, причем указанный ремень передает крутящий момент между ведущим и ведомым шкивами. Транспортное средство также содержит по меньшей мере один элемент, контактирующий с грунтом и функционально соединенный с ведомым шкивом. Способ содержит следующее: определяют первую скорость, пропорциональную оборотам ведомого шкива; определяют заданное значение оборотов холостого хода, основанное по меньшей мере частично на первой скорости, причем заданное значение оборотов холостого хода меньше скорости сцепления, когда обороты ведомого шкива меньше заданных оборотов ведомого шкива, и заданное значение оборотов холостого хода меньше фактических оборотов двигателя, когда обороты ведомого шкива больше заданных оборотов ведомого шкива; определяют требуемые обороты двигателя, и управляют двигателем для работы при условиях, соответствующих заданному значению оборотов холостого хода, когда требуемые обороты двигателя меньше заданного значения оборотов холостого хода, и управляют двигателем для работы при условиях, соответствующих заданному значению оборотов холостого хода, инициируя торможение двигателем, когда обороты ведомого шкива больше заданных оборотов ведомого шкива.
[0012] Согласно отдельным вариантам осуществления настоящего изобретения, заданное значение оборотов холостого хода больше, чем скорость сцепления, когда обороты ведомого шкива больше заданных оборотов ведомого шкива.
[0013] Согласно отдельным вариантам осуществления настоящего изобретения, когда обороты ведомого шкива меньше заданных оборотов ведомого шкива, заданное значение оборотов холостого хода увеличивается с ростом оборотов ведущего шкива
[0014] Согласно отдельным вариантам осуществления настоящего изобретения, определение заданного значения оборотов холостого хода содержит умножение оборотов ведомого шкива на целевое передаточное отношение БСТ
[0015] Согласно отдельным вариантам осуществления настоящего изобретения, определение заданного значения оборотов холостого хода дополнительно содержит вычитание смещения оборотов двигателя из результата умножения оборотов ведомого шкива на целевое передаточное отношение БСТ.
[0016] Согласно отдельным вариантам осуществления настоящего изобретения, целевое передаточное отношение БСТ основывается на фактических оборотах двигателя.
[0017] Согласно отдельным вариантам осуществления настоящего изобретения, смещение оборотов двигателя увеличивается при увеличении фактических оборотов двигателя.
[0018] Согласно отдельным вариантам осуществления настоящего изобретения, транспортное средство также содержит зубчатую передачу, функционально соединяющую по меньшей мере один контактирующий с грунтом элемент с ведомым шкивом. Указанная первая скорость представляет собой скорость вращающегося элемента, функционально соединяющего зубчатую передачу с указанным по меньшей мере одним контактирующим с грунтом элементом. Способ дополнительно содержит определение режима привода зубчатой передачи. Обороты ведомого шкива определяют путем умножения указанной первой скорости на передаточное отношение, соответствующее режиму привода.
[0019] Согласно отдельным вариантам осуществления настоящего изобретения, способ дополнительно содержит определение положения органа управления дросселем. Требуемые обороты двигателя зависят по меньшей мере частично от положения органа управления дросселем.
[0020] Согласно отдельным вариантам осуществления настоящего изобретения, управление двигателем для работы при условиях, соответствующих заданному значению оборотов холостого хода, когда обороты ведомого шкива превышают заданный диапазон оборотов ведомого шкива, содержит: установку заслонки, управляющей подачей воздуха в двигатель в положение, которое обеспечивает подачу меньшего количества воздуха, чем было бы необходимо для работы двигателя с фактическими оборотами.
[0021] Согласно отдельным вариантам осуществления настоящего изобретения, указанной заслонкой является дроссельная заслонка, принадлежащая корпусу дросселя.
[0022] Согласно отдельным вариантам осуществления настоящего изобретения, способ дополнительно содержит определение фактических оборотов двигателя.
[0023] Согласно отдельным вариантам осуществления настоящего изобретения, определение фактических оборотов двигателя включает в себя определение скорости вращения ведущего вала, функционально соединяющего двигатель по меньшей мере с одним контактирующим с грунтом элементом.
[0024] Согласно отдельным вариантам осуществления настоящего изобретения, определение фактических оборотов двигателя включает в себя определение скорости транспортного средства.
[0025] Согласно отдельным вариантам осуществления настоящего изобретения, указанная скорость сцепления представляет собой обороты вхождения в зацепление ведущего шкива.
[0026] Согласно отдельным вариантам осуществления настоящего изобретения, транспортное средство дополнительно содержит центробежную муфту, функционально связывающую ведущий шкив с двигателем, при этом указанная скорость сцепления представляет собой обороты вхождения в зацепление муфты.
[0027] Согласно настоящему изобретению в его другом аспекте, предлагается способ управления двигателем внутреннего сгорания транспортного средства, движущегося под уклон, при органе управления дросселем, находящемся в положении холостого хода. Транспортное средство содержит двигатель внутреннего сгорания, орган управления дросселем, бесступенчатую трансмиссию (БСТ). БСТ содержит ведущий шкив, функционально связанный с двигателем, ведомый шкив, ремень, обернутый вокруг ведущего и ведомого шкивов, причем указанный ремень передает крутящий момент между ведущим и ведомым шкивами. Транспортное средство также содержит по меньшей мере один элемент, контактирующий с грунтом, и функционально связанный с ведомым шкивом. Ведомый шкив изначально имеет обороты ниже заданных оборотов ведомого шкива. Способ содержит следующее: определяют первую скорость, пропорциональную оборотам ведомого шкива; в то время, как обороты ведомого шкива увеличиваются и находятся ниже заданных оборотов ведомого шкива - увеличивают фактические обороты двигателя, по мере того как обороты ведомого шкива возрастают; когда обороты ведомого шкива будут равны заданным оборотам ведомого шкива, фактические обороты двигателя будут соответствовать скорости сцепления, и по мере того, как обороты ведомого шкива продолжают возрастать и превышают заданные обороты ведомого шкива: управляют двигателем для работы при условиях, соответствующих оборотам для торможения двигателем, инициируя торможение двигателем, причем обороты для торможения двигателем меньше фактических оборотов двигателя.
[0028] Согласно отдельным вариантам осуществления настоящего изобретения, обороты для торможения двигателем больше, чем скорость сцепления.
[0029] Согласно отдельным вариантам осуществления настоящего изобретения, скоростью сцепления являются обороты вхождения в зацепление ведущего шкива.
[0030] Согласно отдельным вариантам осуществления настоящего изобретения, транспортное средство также содержит центробежную муфту, функционально связывающую ведущий шкив с двигателем. Указанная скорость сцепления представляет собой обороты вхождения в зацепление муфты.
[0031] Согласно отдельным вариантам осуществления настоящего изобретения, управление двигателем для работы при условиях, соответствующих оборотам для торможения двигателем, содержит: установку заслонки, управляющей подачей воздуха в двигатель в положение, которое обеспечивает подачу меньшего количества воздуха, чем было бы необходимо для работы двигателя с фактическими оборотами.
[0032] Согласно отдельным вариантам осуществления настоящего изобретения, указанной заслонкой является дроссельная заслонка, принадлежащая корпусу дросселя.
[0033] Согласно отдельным вариантам осуществления настоящего изобретения, способ дополнительно содержит определение фактических оборотов двигателя.
[0034] Согласно отдельным вариантам осуществления настоящего изобретения, определение фактических оборотов двигателя включает в себя определение скорости вращения ведущего вала, функционально соединяющего двигатель по меньшей мере с одним контактирующим с грунтом элементом.
[0035] Согласно отдельным вариантам осуществления настоящего изобретения, определение фактических оборотов двигателя включает в себя определение скорости транспортного средства.
[0036] Согласно настоящему изобретению в еще одном его аспекте, предлагается способ управления двигателем внутреннего сгорания транспортного средства. Транспортное средство содержит двигатель внутреннего сгорания и бесступенчатую трансмиссию (БСТ). БСТ содержит ведущий шкив, функционально связанный с двигателем, ведомый шкив и ремень, обернутый вокруг ведущего и ведомого шкивов, причем указанный ремень передает крутящий момент между ведущим и ведомым шкивами. Транспортное средство также содержит по меньшей мере один элемент, контактирующий с грунтом и функционально соединенный с ведомым шкивом. Способ содержит следующее: определяют первую скорость, пропорциональную оборотам ведомого шкива; определяют положение органа управления дросселем, определяют требуемые обороты двигателя, соответствующие положению органа управления дросселем; когда обороты ведомого шкива меньше заданных оборотов ведомого шкива, а фактические обороты двигателя меньше оборотов, обусловливающих равенство оборотов ведущего шкива и скорости сцепления ведущего шкива: управляют двигателем, чтобы увеличить его фактические обороты с целью увеличения оборотов ведущего шкива по меньшей мере до скорости сцепления ведущего шкива, а когда обороты ведомого шкива превышают заданные обороты ведомого шкива, фактические обороты двигателя превышают обороты, обусловливающие равенство оборотов ведущего шкива и скорости сцепления ведущего шкива, а требуемые обороты двигателя меньше оборотов, обусловливающих равенство оборотов ведущего шкива скорости сцепления ведущего шкива: управляют двигателем для работы при условиях, соответствующих оборотам для торможения двигателем, инициируя тем самым торможение двигателем, причем обороты для торможения двигателем меньше, чем фактические обороты двигателя.
[0037] Согласно отдельным вариантам осуществления настоящего изобретения, обороты для торможения двигателем больше оборотов двигателя, обусловливающих равенство оборотов ведущего шкива и скорости сцепления ведущего шкива.
[0038] Согласно отдельным вариантам осуществления настоящего изобретения, обороты ведущего шкива равны фактическим оборотам двигателя.
[0039] Согласно отдельным вариантам осуществления настоящего изобретения, когда обороты ведомого шкива меньше заданных оборотов ведомого шкива, а фактические обороты двигателя меньше оборотов, обусловливающих равенство оборотов ведущего шкива и скорости сцепления ведущего шкива, способ дополнительно содержит управление двигателем с целью увеличения фактических оборотов двигателя, когда обороты ведомого шкива возрастают.
[0040] Согласно отдельным вариантам осуществления настоящего изобретения, способ дополнительно содержит определение оборотов для торможения двигателем. Определение указанных оборотов содержит умножение оборотов ведомого шкива на целевое передаточное отношение БСТ.
[0041] Согласно отдельным вариантам осуществления настоящего изобретения, определение оборотов для торможения двигателем дополнительно содержит вычитание смещения оборотов двигателя из результата умножения оборотов ведомого шкива на целевое передаточное отношение БСТ.
[0042] Согласно отдельным вариантам осуществления настоящего изобретения, целевое передаточное отношение БСТ основывается на фактических оборотах двигателя.
[0043] Согласно отдельным вариантам осуществления настоящего изобретения, смещение оборотов двигателя увеличивается при увеличении фактических оборотов двигателя.
[0044] Согласно отдельным вариантам осуществления настоящего изобретения, транспортное средство дополнительно содержит зубчатую передачу, функционально соединяющую по меньшей мере один контактирующий с грунтом элемент с ведомым шкивом. Указанная первая скорость представляет собой скорость вращающегося элемента, функционально соединяющего зубчатую передачу с указанным по меньшей мере одним контактирующим с грунтом элементом. Способ дополнительно содержит определение режима привода зубчатой передачи. Обороты ведомого шкива определяют путем умножения указанной первой скорости на передаточное отношение, соответствующее режиму привода.
[0045] Согласно отдельным вариантам осуществления настоящего изобретения, управление двигателем для работы при условиях, соответствующих оборотам для торможения двигателем, содержит: установку заслонки, управляющей подачей воздуха в двигатель в положение, которое обеспечивает подачу меньшего количества воздуха, чем было бы необходимо для работы двигателя с фактическими оборотами.
[0046] Согласно отдельным вариантам осуществления настоящего изобретения, указанной заслонкой является дроссельная заслонка, принадлежащая корпусу дросселя.
[0047] Согласно отдельным вариантам осуществления настоящего изобретения, способ дополнительно содержит определение фактических оборотов двигателя.
[0048] Согласно отдельным вариантам осуществления настоящего изобретения, определение фактических оборотов двигателя включает в себя определение скорости вращения ведущего вала, функционально соединяющего двигатель по меньшей мере с одним контактирующим с грунтом элементом.
[0049] Согласно отдельным вариантам осуществления настоящего изобретения, определение фактических оборотов двигателя включает в себя определение скорости транспортного средства.
[0050] Согласно настоящему изобретению в еще одном его аспекте, предлагается способ управления двигателем внутреннего сгорания транспортного средства. Транспортное средство содержит двигатель внутреннего сгорания, заслонку для управления подачей воздуха в двигатель, орган управления дросселем, приспособленный для воздействия на него пользователем транспортного средства, блок электронного управления БЭУ, привод заслонки, функционально связанный с заслонкой для управления положением заслонки по сигналам от БЭУ и бесступенчатую трансмиссию (БСТ). БСТ содержит ведущий шкив, функционально связанный с двигателем, ведомый шкив, ремень, обернутый вокруг ведущего и ведомого шкивов, причем указанный ремень передает крутящий момент между ведущим и ведомым шкивами. Транспортное средство содержит по меньшей мере один элемент, контактирующий с грунтом, и функционально связанный с ведомым шкивом. Способ содержит следующее: регулируют положение заслонки при помощи привода заслонки по сигналам от БЭУ независимо от положения органа управления дросселем, так что ведущий шкив достигает скорости сцепления, когда передаточное отношение ременной передачи меньше максимального передаточного отношения БСТ, при этом передаточное отношение ременной передачи равно скорости вращения ведущего шкива, деленной на скорость вращения ведомого шкива.
[0051] Согласно отдельным вариантам осуществления настоящего изобретения, после того, как ведущий шкив достигает скорости сцепления, способ дополнительно содержит следующее: осуществляют управление двигателем независимо от положения органа управления дросселем, так что условия, по которым осуществляется управление двигателем, соответствуют оборотам для торможения двигателем, при этом обороты для торможения двигателем меньше его фактических оборотов, и тем самым обусловливается торможение двигателем.
[0052] Согласно отдельным вариантам осуществления настоящего изобретения, обороты для торможения двигателем больше скорости сцепления ведущего шкива.
[0053] Согласно отдельным вариантам осуществления настоящего изобретения, управление двигателем независимо от положения органа управления дросселем, так что условия, по которым осуществляется управление двигателем, соответствуют оборотам для торможения двигателем, содержит: установку заслонки, управляющей подачей воздуха в двигатель в положение, которое обеспечивает подачу меньшего количества воздуха, чем было бы необходимо для работы двигателя с фактическими оборотами.
[0054] Согласно отдельным вариантам осуществления настоящего изобретения, управление положением заслонки независимо от положения органа управления дросселем, так что обороты ведущего шкива достигают скорости сцепления, содержит увеличение степени открытия дросселя посредством заслонки.
[0055] Согласно отдельным вариантам осуществления настоящего изобретения, указанной заслонкой является дроссельная заслонка, а привод заслонки является приводом дросселя.
[0056] Согласно настоящему изобретению в еще одном его аспекте, предлагается способ управления двигателем внутреннего сгорания транспортного средства. Транспортное средство содержит двигатель внутреннего сгорания, по меньшей мере один контактирующий с грунтом элемент, функционально связанный с ведомым шкивом, и центробежную муфту, содержащую входную ось, функционально связанную с двигателем, и выходную ось, функционально связанную с указанным по меньшей мере одним контактирующим с грунтом элементом. Способ, содержит следующее: определяют первую скорость, пропорциональную скорости вращения выходной оси, определяют положение органа управления дросселем, определяют требуемые обороты двигателя, соответствующие положению органа управления дросселем; когда скорость вращения выходной оси меньшей заданной скорости вращения выходной оси, а фактические обороты двигателя меньше оборотов двигателя, обусловливающих равенство скорости вращения входной оси и скорости сцепления муфты: управляют двигателем с целью увеличения его фактических оборотов, чтобы скорость вращения входной оси увеличилась по меньшей мере до скорости сцепления муфты, а когда скорость вращения выходной оси превышает заданную скорость вращения выходной оси, фактические обороты двигателя больше его оборотов, обусловливающих равенство скорости вращения входной оси и скорости сцепления муфты, а требуемые обороты двигателя меньше его оборотов, обусловливающих равенство скорости вращения входной оси и скорости сцепления муфты: управляют двигателем для работы при условиях, соответствующих оборотам для торможения двигателем, инициируя тем самым торможение двигателем, при этом обороты для торможения двигателем меньше его фактических оборотов.
[0057] Согласно отдельным вариантам осуществления настоящего изобретения, обороты для торможения двигателем больше, чем его обороты, обусловливающие равенство скорости вращения входной оси и скорости сцепления муфты.
[0058] Согласно отдельным вариантам осуществления настоящего изобретения, когда скорость вращения выходной оси меньше заданной скорости вращения выходной оси, а фактические обороты двигателя меньше, чем его обороты, обусловливающие равенство скорости вращения входной оси и скорости сцепления муфты, способ дополнительно содержит: управление двигателем с целью увеличения его фактических оборотов, когда скорость вращения выходной оси возрастает.
[0059] Согласно отдельным вариантам осуществления настоящего изобретения, управление двигателем для его работы в условиях, соответствующих оборотам для торможения двигателем, содержит: установку заслонки, управляющей подачей воздуха в двигатель в положение, которое обеспечивает подачу меньшего количества воздуха, чем было бы необходимо для работы двигателя с фактическими оборотами.
[0060] Согласно отдельным вариантам осуществления настоящего изобретения, указанной заслонкой является дроссельная заслонка, принадлежащая корпусу дросселя.
[0061] Термины, относящиеся к пространственной ориентации, такие как «вперед», «назад», «передний», «задний», «верхний», «нижний», «левый» и «правый», используются так, как их нормально бы понимал водитель транспортного средства, сидящий на нем в нормальной для вождения позе. Также, для целей данной заявки термины «выше», «более высокий» и «больше, чем», когда они касаются положения (состояния) дроссельного клапана по сравнению с другим положением дроссельного клапана означают положение (состояние) дроссельного клапана, при котором дроссельный клапан открыт в большей степени, чем при других положениях. Аналогично, термины «ниже», «более низкий», «меньше, чем», когда они касаются положения (состояния) дроссельного клапана по сравнению с другим положением дроссельного клапана означают положение (состояние) дроссельного клапана, при котором дроссельный клапан открыт в меньшей степени, чем при других положениях.
[0062] Вариантам осуществления настоящего изобретения соответствует по меньшей мере одна из вышеупомянутых задач и/или один аспект, и не обязательно, чтобы вариантам осуществления соответствовали все задачи или аспекты. Следует понимать, что примеры осуществления способа, соответствующего настоящему изобретению, могут иметь другие аспекты помимо конкретно указанных в описании.
[0063] Дополнительные или другие отличительные признаки, аспекты и преимущества вариантов осуществления настоящего изобретения будут понятны из последующего описания, прилагаемых чертежей и прилагаемой формулы изобретения.
Краткое описание чертежей
[0064] Для лучшего понимания настоящего изобретения, а также других аспектов и дополнительных отличительных признаков следует обращаться к нижеприведенному описанию, взятому в сочетании с прилагаемыми чертежами, из которых:
[0065] фиг. 1 в аксонометрии спереди и слева изображает транспортное средство для отдыха и хозяйственных нужд (ТС-ОХ),
[0066] фиг. 2 схематически изображает силовую передачу и некоторые связанные с ней компоненты ТС-ОХ фиг. 1,
[0067] фиг. 3 представляет график, иллюстрирующий изменение оборотов двигателя, оборотов ведомого шкива и заданного значения оборотов холостого хода во времени в соответствии с осуществлением способа для торможения двигателем.
[0068] фиг. 4 представляет график, иллюстрирующий зависимость оборотов ведомого шкива и заданного значения оборотов холостого хода от скорости транспортного средства в соответствии со способом для торможения двигателем,
[0069] фиг. 5 изображает схему реализации функции для вычисления заданного значения оборотов холостого хода,
[0070] фиг. 6 схематически изображает другую силовую передачу ТС-ОХ фиг. 1 Подробное раскрытие изобретения
[0071] Настоящее изобретение будет описано по отношению к транспортному средству для отдыха и хозяйственных нужд (ТС-ОХ) 10 (в дальнейшем ТС 10) с рядным расположением водительского и пассажирского кресла. Однако, предполагается, что некоторые аспекты изобретения могли бы быть использованы в других типах транспортных средств с БСТ, например, во внедорожном транспортном средстве (ВД-ТС) с сиденьем седельного типа, снегоходе, мотоцикле, и трехколесном транспортном средстве.
[0072] На фиг. 1 изображено ТС 10. У ТС 10 имеется передняя сторона 12, задняя сторона 14 и две боковые стороны 16 (левая и правая). ТС 10 содержит раму 18, на которой установлен корпус транспортного средства. Рама 18 содержит переднюю часть 18А, среднюю часть 18В и заднюю часть 18С. Пара передних колес 20 подвешена к передней части 18А рамы 18 посредством узлов 22А передней подвески. Пара задних колес 20 подвешена к задней части 18С рамы 18 посредством узлов 22В задней подвески. Каждое из четырех колес 20 содержит шину 24. Зона 26 кабины расположена в средней части 18В рамы 18. Зона 26 кабины содержит два кресла 28 (левое и правое). Каждое кресло 28 является креслом ковшового типа, и содержит сиденье и спинку. Предполагается, что кресла 28 могли бы быть откидывающимися креслами другого типа. Каждое кресло 28 также оснащено ремнем безопасности (не показан). Левое и правое кресла установлены в поперечном направлении рядом друг с другом, и предназначены для размещения соответственно водителя и пассажира ТС 10 (т.е. седоков).
[0073] Каркас 30 безопасности присоединен к раме 18, и расположен над зоной 26 кабины. Каркас 30 безопасности представляет собой конструкцию из металлических труб, которая способствует защите водителя и пассажира. Каркас 30 безопасности имеет несколько точек крепления к раме 18. Каркас 30 безопасности дополнительно содержит пару боковых ограничительных элементов 32, по одному с каждой стороны в задней части каркаса 30. Боковые ограничительные элементы 32 проходят вперед от задней части каркаса 30 безопасности. Боковые ограничительные элементы 32 представляют собой U-образные трубы, которые помогают защитить верхнюю часть тела седока. Предполагается, что боковые ограничительные элементы 32 могли бы иметь другую форму. Также предполагается, что ограничительные элементы 32 можно было бы из конструкции исключить.
[0074] Зона 26 кабины является открытой с обеих боковых сторон 16 ТС 10, и в ней образованы два боковых проема 34 (левый и правый), через которые водитель и пассажир могут залезать и вылезать из ТС 10. Боковое ограждение (не показано) можно выборочно располагать поперек каждого бокового проема 34. Боковые ограждения выполнены из гибких ремней и гибких панелей из плетеного материала. Предполагается, что, когда водитель и пассажир едут на ТС 10, боковые ограждения расположены поперек боковых проемов 34. Однако, когда водитель и пассажир не едут на ТС 10, и они хотят либо войти в зону 26 кабины, либо выйти из зоны кабины, боковые ограждения могут быть открыты, чтобы освободить боковые проемы 34.
[0075] На задней части 18С рамы 18 позади кресел 28 смонтирована багажная полка 36. Предполагается, что багажная полка 36 могла бы быть заменена багажным ящиком, шарнирно закрепленным на задней части 18С рамы 18 позади кресел 28. Предполагается, что багажную полку 36 можно было бы из конструкции исключить.
[0076] Устройство рулевого управления, содержащее руль 38, расположено спереди от левого кресла 28. Предполагается, что руль 38 мог бы быть расположен спереди от правого кресла 28. Устройство рулевого управления функционально связано с двумя передними колесами 20, чтобы дать возможность задавать направление движения ТС 10. Приборная панель 40 расположена спереди от руля 38. Орган управления дросселем в виде педали 42 (изображен на фиг. 2) расположен над полом в зоне 26 кабины ниже руля 38 спереди от левого кресла 28.
[0077] Двигатель 44 (показан на фиг. 2) смонтирован в средней части 18В рамы 18, при этом у двигателя имеется часть, расположенная между правым и левым креслами 28. Двигатель 44 функционально связан с четырьмя колесами 20, чтобы приводить в движение ТС 10, что будет подробнее рассмотрено ниже. Предполагается, что двигатель 44 мог бы быть функционально связан только с задними колесами 20, или двигатель можно было бы выборочно переключать между приводом двух или четырех колес 20. Консоль 46, расположенная между правым и левым креслами 28, закрывает и отделяет двигатель 44 от водителя и пассажира. Консоль 46 частично образует центральный охлаждающий туннель, позволяющий воздуху проходить от передней стороны 12 ТС 10 к задней стороне 14 ТС 10 с целью охлаждения двигателя 44. Двигатель 44 представляет собой двухцилиндровый четырехтактный двигатель внутреннего сгорания с V-образным расположение цилиндров. Соответственно двигатель 44 содержит два цилиндра, расположенные под углом друг к другу. Предполагается, что могут быть использованы и двигатели других типов. К примеру, двигатель 44 мог бы представлять собой двухтактный двигатель с рядным расположением цилиндров. Двигатель 44 передает крутящий момент колесам 20 через БСТ 48 и зубчатую передачу 50 (фиг. 2). Переключатель 52 передач (фиг. 2), расположенный вблизи руля 38, позволяет водителю выбрать один из нескольких режимов привода, которые обеспечивает трансмиссия 50. В рассматриваемом варианте осуществления режимы привода включают в себя следующие режимы: стояночный режим, режим нейтрали, задний ход, пониженная передача и повышенная передача. Предполагается, что трансмиссия 50 могла бы обеспечивать другие режимы привода.
[0078] Топливо, предназначенное для подачи в двигатель 44, содержится в топливном баке (не показан), который расположен под пассажирским креслом 28. Топливный бак установлен на средней части 18В рамы 18.
[0079] Силовой агрегат, трансмиссия и некоторые связанные с ними компоненты ТС 10 будут рассмотрены далее согласно фиг. 2.
[0080] Двигатель 44 содержит впускное и выпускное отверстия (не показаны). Впускной воздушный коллектор (не показан) соединен с впускными отверстиями двигателя 44 для доставки воздуха в камеры сгорания (не показаны) двигателя 44. Корпус 54 дросселя по текучей среде связан с впускным коллектором и расположен (по ходу движения воздуха) перед коллектором. Корпус 54 дросселя содержит дроссельную заслонку 56, шарнирно установленную внутри корпуса.
[0081] При работе двигателя 44 дроссельная заслонка 56 может перемещаться между широко открытым положением дросселя и положением минимального открытия. При широко открытом положении дросселя в двигатель 44 подается максимальное количество воздуха для текущих условий работы. При минимальном положении дроссельной заслонки 56 дроссель слегка приоткрыт, и в двигатель 44 подается минимальное количество воздуха для текущих условий работы. Предполагается, что указанное минимальное положение могло бы соответствовать полностью закрытому дросселю. В этом случае в дроссельной заслонке 56 предусматривают отверстия или перепускные каналы в корпусе 54 дросселя, чтобы обеспечить подачу некоторого количества воздуха в двигатель 44.
[0082] Чтобы управлять работой двигателя 44, предусмотрен блок 58 электронного управления (БЭУ). БЭУ 58 принимает сигналы от различных датчиков (некоторые из них будут рассмотрены ниже), и посылает сигналы различным компонентам для управления работой указанных компонентов на основе сигналов, полученных от датчиков. Хотя изображен только один БЭУ 58, предполагается, что БЭУ 58 мог бы быть заменен несколькими устройствами управления, которые делят между собой различные функции БЭУ 58. Также, в рассматриваемом варианте осуществления, различные компоненты, связанные с БЭУ 58, электрически присоединены к БЭУ 58 посредством проводов. Однако, один или более различных компонентов могли бы быть соединены с БЭУ 58 беспроводным способом, чтобы обеспечить беспроводной обмен сигналами между устройствами.
[0083] Двигатель 44 содержит выходной вал, которым в данном варианте осуществления является коленчатый вал 60. Предполагается, что выходным валом мог бы служить вал, функционально соединенный с коленчатым валом 60 двигателя 44. При таком осуществлении предполагается, что выходной вал мог бы вращаться со скоростью, отличающейся от скорости вращения коленчатого вала 60. Датчик 62 оборотов двигателя воспринимает скорость вращения коленчатого вала 60, которая здесь и далее именуется оборотами двигателя. Датчик 62 оборотов двигателя электрически соединен с БЭУ 58, чтобы посылать в блок управления сигнал, представляющий частоту вращения вала двигателя.
[0084] БСТ 48 содержит ведущий шкив 64, ведомый шкив 66 и приводной ремень 68, обернутый вокруг шкивов 64 и 66. В данном варианте осуществления приводной ремень 68 представляет собой резиновый клиновидный ремень, однако, можно рассматривать и другие типы ремней. Ведущий шкив 64 установлен на коленчатом валу 60. В данном варианте осуществления, скорость вращения ведущего шкива, как таковая, равна скорости вращения вала двигателя, измеренной датчиком 62 оборотов двигателя. В тех вариантах, где коленчатый вал 60 не является выходным валом, ведущий шкив 64 установлен на выходном валу, и скорость вращения шкива может быть определена по сигналу датчика 62 оборотов с учетом передаточного отношения между коленчатым валом 60 и выходным валом. Ведомый вал 66 установлен на входном валу 70 трансмиссии 50.
[0085] Ведущий шкив 64 содержит подвижную щеку 72, фиксированную щеку 74 и звездообразную деталь - слайдер 76. Слайдер 76 содержит несколько поворотных центробежных грузов 78. Когда обороты ведущего шкива увеличиваются, центробежные грузы 78 давят на подвижную щеку 72 шкива, чтобы переместить подвижную щеку 72 в направлении фиксированной щеки 74, и тем самым увеличить эффективный диаметр ведущего шкива 64. Пружина (не показана) смещает подвижную щеку 72 шкива в направлении от фиксированной щеки 74. При низких оборотах ведущего шкива промежуток между фиксированной и подвижной щеками 74, 72 вынуждает ведущий шкив 64 вращаться относительно приводного ремня 68. По мере того как обороты ведущего шкива увеличиваются, фиксированная и подвижная щеки 74, 72 сближаются, и ремень 68 в конечном счете в достаточной степени зажимается между фиксированной и неподвижной щеками 74, 72, чтобы можно было передавать крутящий момент между ведущим шкивом 64 и ремнем 68. Обороты ведущего шкива, при которых происходит захват ремня 68, можно именовать скоростью сцепления ведущего шкива. По мере того как обороты ведущего шкива увеличиваются, эффективный диаметр ведущего шкива 64 возрастает. Предполагается, что мог бы быть использован другой тип ведущего шкива с центробежным сцеплением.
[0086] Согласно другому варианту осуществления, между ведущим шкивом 64 и коленчатым валом 60 установлена центробежная муфта 75 (на фиг. 2 показана пунктирной линией). В данном варианте ведущий шкив 64 постоянно сцеплен с ремнем 68. При низких оборотах центробежная муфта 75 расцеплена, и ведущий шкив 64 может вращаться относительно коленчатого вала 60, будучи приведен во вращение посредством ремня 68 от ведомого шкива 66. Обороты двигателя, при которых происходит сцепление муфты 75, можно именовать скоростью сцепления муфты.
[0087] Ведомый шкив 66 содержит фиксированную щеку 80 и подвижную щеку 82. Ведомый шкив 66 содержит механизм, чувствительный к крутящему моменту, который регулирует эффективный диаметр ведомого шкива 66.
[0088] Входной вал 70 трансмиссии 50, на котором установлен ведомый шкив 66, находится в зацеплении с входной шестерней (не показана) трансмиссии 50. Трансмиссия 50 содержит ряд зубчатых колес, которые можно выборочно вводить в зацепление, чтобы изменять отношение скорость вращения/крутящий момент между входом и выходом трансмиссии 50, и/или изменять направление вращения входного вала относительно выходного вала трансмиссии 50. Путем изменения положения переключателя 52 передач меняются зубчатые колеса, которые находится в зацеплении в трансмиссии 50, что приводит к тому, что трансмиссия 50 начинает работать в другом режиме привода. Датчик 84 положения определяет положение переключателя 52 передач, и посылает в БЭУ 58 сигнал, представляющий положение переключателя 52. В данном варианте осуществления переключатель 52 передач механически соединен с трансмиссией 50 посредством тянуще-толкающего тросика (не показан), который перемещает селектор зубчатых колес (не показан), выбирая тем самым режим привода. Предполагается, что вместо механического соединения трансмиссия 50 может быть оснащена электрическим мотором, связанным с селектором зубчатых колес, и что БЭУ 58 может управлять указанным электрическим мотором на основе сигналов, которые БЭУ 58 получает от датчика 84 положения переключателя передач. Также предполагается, что датчик 84 мог бы воспринимать положение селектора зубчатых колес.
[0089] Трансмиссия 50 функционально соединена с передним ведущим валом 86 и задним ведущим валом 88. Передний ведущий вал 86 соединен с передним дифференциалом 90. Передний дифференциал 90 соединен с двумя передними полуосями 92. Передние полуоси 92 соединены с передними колесами 20. Задний ведущий вал 88 соединен с задним дифференциалом 94. Задний дифференциал 94 соединен с двумя задними полуосями 96. Задние полуоси 96 соединены с задними колесами 20. Карданные шарниры (не показаны) обеспечивают соединения между ведущими валами 86, 88, дифференциалами 90, 94, полуосями 92, 96 и колесами 20. Предполагается, что ведущие валы 86, 88 и полуоси 92, 96, хотя каждый из валов и полуосей показаны, как единый вал (единая полуось), могут быть выполнены из нескольких валов (полуосей). Также предполагается, что один из ведущих валов 86, 88 мог бы быть опущен в случае транспортного средства с двухколесным приводом. Также предполагается, что один из ведущих валов 86, 88 можно было бы выборочно соединять с трансмиссией 50, и тем самым давать ТС 10 возможность работать в режиме двухколесного привода или в режиме четырехколесного привода.
[0090] Датчик 98 скорости вращения электрически соединен с БЭУ 58. Датчик 98 скорости вращения воспринимает скорость вращения заднего приводного вала 88, и посылает сигнал, представляющий указанную скорость, в БЭУ 58. Зная передаточное отношение (т.е. отношение входной скорости вращения (на стороне ведомого шкива) к выходной скорости вращения (на стороне ведущего вала)) на основе сигнала от датчика 84 положения переключателя передач, БЭУ 58 может определить скорость вращения ведомого шкива, умножив скорость, зарегистрированную датчиком 98 скорости вращения, на указанное передаточное отношение. БЭУ 58 также использует сигнал от датчика 98 скорости вращения для вычисления скорости движения транспортного средства на основе диаметра колес 20 и передаточного отношения дифференциала 94. Предполагается, что датчик 98 скорости вращения в ином варианте мог бы воспринимать скорость вращения ведущего вала 86, скорость вращения одной из полуосей 92, 96, вращательную компоненту, связанную с одним из колес 20 (например, тормозного диска), скорость вращения одного из колес 20, вращающегося компонента одного из дифференциалов 90, 94, скорость вращения вала трансмиссии 50, входного вала или ведомого шкива 66.
[0091] Датчик 100 положения органа управления дросселем определяет положение педали 42 газа. Датчик 100 положения органа управления дросселем электрически соединен с БЭУ 58, и посылает в БЭУ 58 сигнал, представляющий положение педали 42 газа. Педаль 42 газа можно перемещать между положением 0%, т.е. положением, когда водитель полностью отпускает педаль, и положением 100%, т.е. положением, когда водитель до отказа нажимает на педаль 42. Педаль 42 смещена к положению органа управления дросселем 0%. В транспортных средствах, в которых используется орган управления дросселем, иной, нежели педаль 42, например, поворачивающаяся рукоятка или рычаг органа управления дросселем, датчик 100 положения органа управления дросселем приспособлен для определения положения органа определенного типа. Предполагается, что датчик 100 положения органа управления дросселем мог бы определять положение элемента ТС 10 иного, нежели педаль 42, но который перемещается за счет педали 42 газа. В этом случае БЭУ 58 мог бы определять положение органа управления дросселем, используя функциональную зависимость между положением педали 42 и положением указанного элемента.
[0092] Привод 102 дроссельной заслонки расположен ан левой стороне корпуса 54 дросселя. Привод 102 соединен с дроссельной заслонкой 56, чтобы поворачивать дроссельную заслонку 56 и устанавливать в различные положения. Привод 102 дроссельной заслонки электрически соединен с БЭУ 58, и принимает сигналы от БЭУ 58. Привод 102 дроссельной заслонки меняет положение дроссельной заслонки 56 на основе сигналов, полученных от БЭУ 58. В данном варианте осуществления, привод 102 дроссельной заслонки представляет собой вращающийся электрический мотор, однако можно представить, что возможно использование исполнительных механизмов других типов. Системы данного типа иногда называют системами с электроуправляемым дросселем.
[0093] Датчик 104 положения дроссельной заслонки определяет положение дроссельной заслонки 56 путем измерения положения оси привода 102 дроссельной заслонки. Предполагается, что датчик 104 положения дроссельной заслонки мог бы воспринимать положение дроссельной заслонки 56 непосредственно. Также предполагается, что датчик 104 положения дроссельной заслонки мог бы быть встроен в привод 102 дроссельной заслонки. Датчик 104 положения дроссельной заслонки электрически соединен с БЭУ 58, и посылает в БЭУ 58 сигнал, представляющий положение дроссельной заслонки 56.
[0094] Предполагается, что в других вариантах осуществления силового агрегата и трансмиссии дополнительно к вышеупомянутым датчикам или вместо них могли бы использоваться другие датчики.
[0095] Во время разгона ТС 10 водитель нажимает на педаль 42 газа, и двигатель 44 приводит во вращение коленчатый вал 60, который приводит во вращение ведущий шкив 64. Если предположить, что ведущий шкив 64 вращается со скоростью, превышающей скорость его сцепления с ремнем, то ведущий шкив 64 находится в контакте с ремнем 68, и приводит в движение ремень 68, который в свою очередь приводит во вращение ведомый шкив 66. Ведомый шкив 66 приводит во вращение входной вал 70. Входной вал 70 приводит в движение трансмиссию 50. Трансмиссия 50, которая работает в соответствии с режимом привода, который выбран переключателем 52 передач, приводит во вращение ведущие валы 86, 88 (если трансмиссия 50 не находится в режиме нейтрали). Ведущие валы 86, 88 приводят во вращение их соответствующие дифференциалы 90, 94. Дифференциалы 90, 94 затем приводят во вращение соответствующие колеса 20 через соответствующие полуоси 92, 96.
[0096] Если ТС 10 находится в движении и ведущий шкив 64 вращается со скоростью, превышающей скорость его сцепления с ремнем, то, когда водитель отпускает педаль 42 газа, БЭУ 58 посылает сигнал в привод 102 дроссельной заслонки с целью закрытия дросселя посредством заслонки 56. В сущности, управление двигателем 44 в этот момент осуществляется при условиях, соответствующих оборотам двигателя, которые меньше фактических оборотов двигателя. В этих условиях колеса 20 приводят во вращение полуоси 92, 96, которые приводят во вращение дифференциалы 90, 94, которые приводят во вращение ведущие валы 86, 88, которые приводят в движение трансмиссию 50. Трансмиссия 50, которая работает в соответствии с режимом привода, выбранным переключателем 52 передач, приводит во вращение входной вал 70 (если трансмиссия 50 не находится в режиме нейтрали). Входной вал 70 приводит во вращение ведомый шкив 66, который приводит в движение ремень 68. Поскольку ведущий шкив 64 вращается со скоростью, превышающей скорость сцепления, ведущий шкив захватывает ремень 68, и ремень 68 приводит во вращение ведущий шкив 64. Ведущий шкив 64 приводит во вращение коленчатый вал 60. Частота вращения, с которой ведущий шкив 64 приводит во вращение коленчатый вал 60 (т.е. фактические обороты двигателя) выше той частоты вращения, которая задается для работы двигателя 44. Поскольку обороты, задаваемые двигателю 44, меньше фактических оборотов двигателя (т.е. дроссель открыт недостаточно посредством дроссельной заслонки 56), осуществляется торможение двигателем. К примеру, если ведущий шкив 64 приводит в движение двигатель 44 с фактической частотой вращения 2200 об/мин, но положение дроссельной заслонки 56 соответствует положению, при котором двигатель нормально бы работал с частотой1900 об/мин, условия, по которым двигатель 44 заставляют работать, приводят к недостаточной подаче воздуха в двигатель 44 по сравнению с подачей, которая была бы необходима при нормальных условиях, чтобы приводить двигатель 44 в движение с частотой 2200 об/мин. В результате в двигателе 44 создается разрежение, которое создает сопротивление крутящему моменту, прикладываемому со стороны ведущего шкива 64 к коленчатому валу 60, и происходит торможение транспортного средства посредством двигателя. Чем больше разница между фактическими оборотами двигателя, и теми оборотами, которые задают двигателю 44 для работы, тем интенсивнее торможение двигателем.
[0097] Согласно настоящему изобретению, если ТС 10 находится в движении или начинает движение из состояния покоя, например, начинает двигаться под уклон, а ведущий шкив 64 вращается со скоростью, которая ниже скорости его сцепления с ремнем, то, когда водитель отпускает педаль 42 газа (если она уже не была отпущена), БЭУ 58 посылает сигнал в привод 102 дроссельной заслонки, чтобы прикрыть дроссельную заслонку 56 и установить в положение, соответствующее заданному значению оборотов холостого хода (idle speed set point), что будет дополнительно рассмотрено ниже. Как и рассмотренном выше случае, при этих условиях колеса 20 приводят во вращение полуоси 92, 96, которые приводят во вращение дифференциалы 90, 94, которые приводят во вращение ведущие валы 86, 88, которые приводят в движение трансмиссию 50. Трансмиссия 50, которая работает в соответствии с режимом привода, выбранным переключателем 52 передач, приводит во вращение входной вал 70 (если трансмиссия 50 не находится в режиме нейтрали). Входной вал 70 приводит во вращение ведомый шкив 66, который приводит в движение ремень 68. В отличие от рассмотренных выше условий, поскольку ведущий шкив 64 вращается со скоростью, которая ниже скорости сцепления, ведущий шкив 64 не захватывает ремень 68, и ремень 68 не приводит ведущий шкив во вращение. В сущности, никакого торможения двигателем изначально не обеспечивается. Согласно настоящему изобретению, предлагается способ, который будет описан ниже, и посредством которого будет обеспечиваться торможение двигателем, когда увеличивается скорость вращения ведомого шкива и скорость движения транспортного средства, и при этом не потребуется никакого механического устройства, такого как муфта одностороннего вращения, как в существующих технических решениях.
[0098] Способ, соответствующий настоящему изобретению, будет рассмотрен согласно фиг. 3-5. Графики на фиг. 3 и 4 иллюстрируют варианты применения предлагаемого способа, когда ТС 10 движется под уклон при полностью отпущенной педали 42 газа, и разгоняется под действием силы тяжести. На графике фиг. 3 фактические обороты двигателя представлены штриховой линией. На графиках фиг. 3 и 4 скорость вращения (обороты) ведомого шкива показаны штрих-пунктирной линией, причем обороты ведомого шкива были умножены на максимальное передаточное отношение БСТ, которое в данном примере осуществления равно 2,85. Передаточное отношение БСТ - это отношение оборотов ведущего шкива к оборотам ведомого шкива, и это также отношение эффективного диаметра ведомого шкива к эффективному диаметру ведущего шкива. Максимальное передаточное отношение БСТ - это передаточное отношение БСТ, когда у ведомого шкива 66 действует максимальный эффективный диаметр, а у ведущего шкива 64 действует минимальный эффективный диаметр. Благодаря умножению оборотов ведомого шкива на максимальное передаточное отношение БСТ, штрих-пунктирная линия также показывает обороты, которые бы имел ведущий шкив 64, если бы он захватывал ремень 68, а БСТ 48 имела максимальное передаточное отношение. На графиках фиг. 3 и 4 сплошной линией представлено заданное значение оборотов холостого хода. Заданное значение оборотов холостого хода - это величина, вычисленная блоком БЭУ 58 из условий, включая положение дроссельной заслонки 56, при котором следует работать с двигателем 44, чтобы применить способ, соответствующий настоящему изобретению. В данном варианте осуществления заданное значение оборотов холостого хода - это минимально необходимое значение оборотов двигателя для данных оборотов ведомого шкива. В способе, соответствующем настоящему изобретению, БЭУ 58 управляет двигателем 44, чтобы последний работал при условиях, которые обеспечили бы заданное значение оборотов холостого хода, если бы на ТС 10 не действовали никакие внешние силы, вызывающие ускорение транспортного средства. Согласно данным сценариям, внешняя сила - это составляющая силы тяжести, заставляющая ТС 10 двигаться под уклон. Осуществление способа вычисления заданного значения оборотов холостого хода будет рассмотрено более подробно согласно фиг.5. Следует понимать, что графики 3 и 4 соответствуют конкретному примеру при конкретных условиях, и что форма различных кривых и различные значения, такие как скорость сцепления ведущего вала, отличались бы для другой БСТ, другого транспортного средства, двигателя и/или уклона дороги, если говорить о нескольких переменных, которые влияли бы на вид кривых.
[0099] При работе ТС 10 блок БЭУ 58 определяет требуемые обороты двигателя на основе сигналов, получаемых по меньшей мере отдатчика 100 положения органа управления дросселем. Чтобы определять требуемые обороты двигателя, БЭУ 58 может также дополнительно использовать сигналы от одного или более других датчиков. Если требуемые обороты двигателя меньше заданного значения оборотов холостого хода для текущих оборотов ведомого шкива, тогда БЭУ 58 посредством привода 102 регулирует положение дроссельной заслонки 56 и другие параметры двигателя, чтобы работать при условиях, соответствующих заданному значению оборотов холостого хода. Это происходит без какого-либо вмешательства водителя. Если требуемые обороты двигателя окажутся больше заданного значения оборотов холостого хода, тогда БЭУ 58 регулирует положение дроссельной заслонки 56 и другие параметры двигателя, чтобы работать при условиях, соответствующих требуемым оборотам двигателя. Например, когда водитель полностью отпускает педаль 42 газа, это указывает на то, требуемые обороты двигателя соответствуют минимальным рабочим оборотам двигателя 44, которые в примере на фиг.3 соответствуют приблизительно 1250 об/мин. Однако, если заданное значение оборотов холостого хода для данных оборотов ведомого шкива выше, чем минимальные рабочие обороты, то БЭУ 58 должен обеспечить работу двигателя при условиях, соответствующих заданному значению оборотов холостого хода.
[0100] Согласно другому варианту осуществления (не показан), в канале перепуска воздуха для режима холостого хода (idle air bypass passage) предусмотрен воздушный перепускной клапан (air bypass valve), при этом управление положением воздушного перепускного клапана осуществляется приводом (actuator) указанного клапана. Поскольку подробности конструкции корпуса дросселя, содержащего такой канал перепуска воздуха для режима холостого хода, клапан и привод должны быть известны специалистам в данной области, эти подробности далее рассматриваться не будут. В таком варианте осуществления, если требуемые обороты двигателя меньше заданного значения оборотов холостого хода для текущих оборотов ведомого шкива, то БЭУ 58 управляет положением воздушного перепускного клапана посредством его привода, и других параметров двигателя, чтобы работать при условиях, соответствующих заданному значению оборотов холостого хода. Это происходит без какого-либо вмешательства водителя.
[0101] Далее, согласно фиг. 3 способ будет рассмотрен в соответствии с вышеописанным сценарием (т.е. ТС 10 движется под уклон при полностью отпущенной педали 42 газа, при этом ТС 10 ускоряется за счет силы тяжести) в аспекте зависимости скорости вращения (оборотов) от времени. Согласно данному сценарию, переключатель 52 передач находится в верхнем положении, и трансмиссия 50 соответственно работает в режиме повышенной передачи. Также, согласно данному сценарию, ведущий шкив 64 изначально не захватывает ремень 68. Когда под действием силы тяжести ТС 10 ускоряется, обороты ведомого шкива линейно возрастают. В данном варианте осуществления, когда скорость вращения ведомого шкива меньше приблизительно 439 об/мин (1250 об/мин деленные на 2,85 (максимальное передаточное отношение БСТ), диапазон А на фиг. 3), заданное значение оборотов холостого хода постоянно и равно 1250 об/мин, что соответствует минимальным рабочим оборотам двигателя 44. БЭУ 58 осуществляет управление двигателем 44, чтобы двигатель работал при условиях, соответствующих постоянному заданному значению оборотов холостого хода. При указанных условиях привод 102 дроссельной заслонки переводит дроссельную заслонку 56 к минимальному положению (т.е. положению, при котором в двигатель подается наименьшее количество воздуха). Поскольку ведущий шкив 64 вращается со скоростью, которая ниже скорости его сцепления с ремнем, никакой внешний крутящий момент от ремня 68 не прикладывается к коленчатому валу 60, и фактические обороты двигателя соответствуют заданному значению оборотов холостого хода (т.е. 1250 об/мин).
[0102] Как только при разгоне ТС 10 обороты ведомого шкива превысят минимальные рабочие обороты двигателя 44 (т.е. 439 об/мин), что на графике происходит приблизительно в точке 2,2 с, заданное значение оборотов холостого хода начинает увеличиваться по мере роста оборотов ведомого шкива (диапазон В на фиг. 3). Как можно видеть, заданное значение оборотов холостого хода увеличивается медленнее оборотов ведомого шкива, но предполагается, что заданное значение оборотов холостого хода могло бы увеличиваться в том же темпе или быстрее, чем обороты ведомого шкива. По мере того как БЭУ 58 продолжает управлять двигателем 44 при условиях, соответствующих заданному значению оборотов холостого хода, дроссельная заслонка 56 постепенно открывает отверстие дросселя, когда заданное значение оборотов холостого хода увеличивается. В результате, поскольку условия, по которым БЭУ 58 управляет двигателем 44, соответствуют оборотам двигателя (т.е. заданному значению оборотов холостого хода), которые больше фактических оборотов двигателя (т.е. дроссельная заслонка 56 открыла отверстие дросселя в достаточной степени), двигатель 44 разгоняется, и фактические обороты двигателя, измеренные датчиком 62 оборотов, увеличиваются.
[0103] По мере того как ТС 10 продолжает разгоняться, обороты ведомого шкива также продолжают возрастать, а заданное значение оборотов холостого хода в конце концов увеличивается до скорости сцепления ведущего шкива (нижняя граница диапазона С на фиг. 3). В данном варианте осуществления это происходит приблизительно в момент времени 3,1 с, когда заданное значение оборотов холостого хода достигает скорости сцепления ведущего шкива 1700 об/мин. Заданное значение оборотов холостого хода продолжает увеличиваться и в течение короткого промежутка времени после того, как оно достигает скорости сцепления ведущего шкива (т.е. уровня верхней границы диапазона С на фиг. 3) в момент времени приблизительно 3,2 с; с учетом инерции двигателя его фактические обороты также достигают скорости сцепления ведущего шкива (точка Е на фиг. 3). Как только фактические обороты двигателя достигают скорости сцепления ведущего шкива, ведущий шкив 64 при указанной скорости сцепления также поворачивается, и захватывает ремень 68. Предполагается, что темп увеличения заданного значения оборотов холостого хода, прежде чем ведущий шкив 64 достигает скорости сцепления, можно было бы изменить по сравнению с тем, что показан на фиг. 3, так чтобы ведущий шкив 64 достигал скорости сцепления раньше или позднее, чем показано.
[0104] Как можно видеть, как только ведущий шкив 64 захватывает ремень 68, обороты ведущего шкива быстро возрастают. Это происходит потому, что крутящий момент теперь передается на ведущий шкив 64 от ремня 68, и обороты ведущего шкива, которые соответствовали бы оборотам ведомого шкива (т.е. обороты ведомого шкива, умноженные на передаточное отношение БСТ), оказываются выше оборотов ведущего шкива из-за ускорения, которое испытывает ТС 10. Как было описано выше, когда значение оборотов ведомого шкива, умноженное на передаточное отношение БСТ, выше, чем значение оборотов ведущего шкива при сцеплении ведущего шкива 64 с ремнем 68, колеса 20 приводят во вращение полуоси 92, 96, которые приводят во вращение дифференциалы 90, 94, которые приводят во вращение ведущие валы 86, 88, которые приводят в движение трансмиссию 50, которая вращает входной вал 70 (если трансмиссия 50 не находится в режима нейтрали), который вращает ведомый шкив, который приводит в движение ремень 68, который вращает ведущий шкив 64, который наконец приводит во вращение коленчатый вал 60.
[0105] Как только обороты ведущего шкива превзойдут заданное значение оборотов холостого хода (диапазон D на фиг. 3), которое определяет условия управления двигателем 44 при вышеописанных рабочих условия, скорость, с которой ведущий шкив 64 приводит во вращение коленчатый вал 60 (т.е. фактические обороты двигателя), станет больше скорости, которая задается для работы двигателя 44 (т.е. заданное значение оборотов холостого хода). Поскольку заданное значение оборотов холостого хода меньше, чем фактические обороты двигателя, возникает торможение за счет двигателя, поскольку дроссельной заслонке 56 задано положение, которое «меньше» того положения, которое было бы необходимо для работы двигателя 44 с фактическими оборотами. Результат торможения двигателем можно видеть на фиг.3, где наклон кривой оборотов ведомого шкива на начинает уменьшаться в диапазоне D, тем самым указывая на уменьшение ускорения ТС 10.
[0106] Как можно видеть на фиг. 3, как только обороты ведущего шкива становятся больше заданного значения оборотов холостого хода, это заданное значение сначала слегка уменьшается, затем увеличивается, а после этого уменьшается почти до скорости сцепления ведущего вала, после чего постоянно увеличивается с небольшой быстротой. Такой способ управления обеспечивает плавный переход к состоянию торможения двигателем, однако предполагается, что процесс может отличаться от показанного на фиг. 3. В данном варианте осуществления, после того, как обороты ведущего шкива 64 достигают скорости сцепления, заданное значение оборотов холостого хода всегда поддерживают выше скорости сцепления ведущего шкива. Однако, предполагается, что, после того, как обороты ведущего шкива 64 достигают скорости сцепления, заданное значение оборотов холостого хода можно было бы опустить ниже скорости сцепления ведущего шкива. Как объяснялось выше, интенсивность применяемого торможения двигателем увеличивается, когда увеличивается разность между оборотами ведущего шкива и теми оборотами, которые задаются для работы двигателя 44 (т.е. заданным значением оборотов холостого хода). В сущности, как только ведущий шкив 64 захватывает ремень 68, определяют заданное значение оборотов холостого хода, исходя из требуемой интенсивности торможения двигателем. В данном варианте осуществления, как только ведущий шкив 64 достигает скорости сцепления, заданное значение оборотов холостого хода регулируют так, чтобы уменьшить ускорение ТС 10. Поскольку управление двигателем 44 при условиях, соответствующих заданному значению оборотов холостого хода приводит к торможению двигателем после того, как ведущий шкив 64 достигнет скорости сцепления, данную часть заданного значения оборотов холостого хода называют «оборотами для торможения двигателем» (engine braking speed). Также, как можно видеть в диапазоне D на фиг. 3, после того, как обороты ведущего шкива становятся больше заданного значения оборотов холостого хода, обороты ведущего шкива увеличиваются до тех пор, пока не догонят обороты, с которыми шкив должен бы работать для реализации текущих оборотов ведомого шкива (т.е. оборотов ведомого шкива, умноженных на передаточное отношение БСТ).
[0107] Соответственно, согласно данному способу, когда обороты ведомого шкива увеличиваются, а обороты ведущего шкива остаются ниже скорости сцепления ведущего шкива, БЭУ 58 управляет двигателем 44 так, чтобы последний работал при условиях, соответствующих заданному значению оборотов холостого хода, которое увеличивается при увеличении оборотов ведомого шкива. Это делают, например, увеличивая количество воздуха, подаваемого в двигатель 44, путем открывания дроссельной заслонки 56 или открывания воздушного перепускного клапана (если таковой присутствует) независимо от положения педали газа, так чтобы количество воздуха, подаваемого в двигатель 44, было больше по сравнению с тем количеством, которое бы подавалось в двигатель 44, если бы положение заслонки соответствовало положению педали 42 газа. В результате фактические обороты двигателя, и, следовательно, обороты ведущего шкива возрастают. Если обороты ведомого шкива продолжают увеличиваться, то обороты ведущего шкива в конечном счете достигают скорости сцепления, обеспечивая таким образом торможение двигателем. Как только ведущий шкив 64 захватывает ремень 68, управление двигателем для работы при условиях, соответствующих заданному значению оборотов холостого хода, приводит к торможению двигателем. Такое управление двигателем 44 посредством БЭУ 58 выполняется независимо от команд со стороны водителя (т.е. водителю не требуется нажимать на педаль 42 газа, чтобы увеличить обороты ведущего шкива, и инициировать торможение двигателем).
[0108] Вышеописанный способ может также быть применен в контексте скоростей вращения шкивов. Когда ведущий шкив 64 вращается со скоростью ниже скорости сцепления, а фактическая скорость вращения ведущего шкива, деленная на фактическую скорость вращения ведомого шкива (т.е. отношение оборотов шкивов) меньше максимального передаточного отношения БСТ (т.е. максимального возможного передаточного отношения, когда ремень 68 сцеплен с ведущим шкивом), которое в данном варианте осуществления равно 2,85, БЭУ 58 управляет работой двигателя 44 так, что ведущий шкив 64 достигает скорости сцепления. Как говорилось выше, БЭУ 58 определяет обороты ведущего и ведомого шкивов по сигналам датчиков соответственно 62 и 98. Соответственно, когда передаточное отношение БСТ меньше, чем 2,85, БЭУ 58 управляет работой двигателя 44 так, чтобы увеличить заданное значение оборотов холостого хода и форсировать сцепление ведущего шкива 64. Это делается, например, путем увеличения количества воздуха, вводимого в двигатель 44, за счет открывания дроссельной заслонки или открывания воздушного перепускного клапана, если таковой имеется. После того, как ведущий шкив 64 входит в зацепление с ремнем 68, управляют двигателем 44 для работы при условиях, соответствующих заданному значению оборотов холостого хода, приводит к торможению двигателем. Как было сказано выше, управление двигателем 44 посредством БЭУ 44 выполняется независимо от команд водителя (т.е. водителю не требуется нажимать на педаль 42 газа, чтобы увеличить обороты ведущего шкива). В сущности, количество воздуха, подаваемого в двигатель 44, больше, чем то количество, которое бы подавалось в двигатель 44, если бы положение дроссельной заслонки соответствовало положению педали 42 газа.
[0109] Далее, согласно фиг. 4 способ будет рассмотрен в соответствии с вышеописанным сценарием (т.е. ТС 10 движется под уклон при полностью отпущенной педали 42 газа, при этом ТС 10 ускоряется за счет силы тяжести) в аспекте зависимости скорости вращения (оборотов) от скорости движения транспортного средства. Согласно данному сценарию, переключатель 52 передач находится в верхнем положении, и трансмиссия 50 соответственно работает в режиме повышенной передачи. Также, согласно данному сценарию, ведущий шкив 64 изначально не захватывает ремень 68. В данном варианте осуществления скорость транспортного средства вычисляют, используя сигнал, получаемый от датчика 98 скорости. Предполагается, что скорость транспортного средства можно было бы получить и от других датчиков или сигналов. Например, скорость транспортного средства могла бы быть получена от системы GPS, которая вычисляет скорость транспортного средства, определяя перемещение ТС 10 во времени. Следует отметить, что кривая оборотов двигателя (т.е. пунктирная линия) на фиг.4 не видна перед точкой Е и на коротком отрезке после точки Е, а может быть видна только между точкой Е и штрих-пунктирной линией. Это происходит потому, что перед точкой Е кривая оборотов двигателя накладывается на сплошную линию, а на коротком отрезке после точки Е кривая оборотов двигателя накладывается на штрих-пунктирную линию. Поскольку имеет место прямое соотношение между скоростью транспортного средства и оборотами ведомого шкива, БЭУ 58 управляет двигателем 44 так, чтобы он работал при условиях, соответствующих заданному значению оборотов холостого хода, аналогично управлению, раскрытому согласно фиг. 3. В виду этого, а также ввиду прямой зависимости между оборотами двигателя и оборотами ведомого шкива, для упрощения описания, управление двигателем 44 в указанных диапазонах подробно далее рассматриваться не будет. Перед тем, как ведущий шкив 64 достигнет скорости сцепления (т.е. точки Е), БЭУ 58 управляет работой двигателя 44 так, чтобы наращивать обороты двигателя по мере увеличения скорости транспортного средства, и, следовательно, скорости вращения ведомого шкива, до тех пор, пока не будут достигнуты обороты вхождения в зацепления ведущего шкива. После того, как обороты ведущего шкива достигнут скорости сцепления (т.е. точки Е), фактические обороты двигателя увеличиваются так, чтобы обороты ведущего шкива стали равными оборотам ведущего шкива, с которыми он бы вращался при текущей скорости вращения ведомого шкива (т.е. оборотам ведомого шкива, умноженным на передаточное отношение БСТ), при этом БЭУ 58 управляет двигателем 44, чтобы двигатель работал при условиях, соответствующих заданному значению оборотов холостого хода, которое меньше фактических оборотов двигателя, чтобы инициировать торможение двигателем, аналогичное описанному ранее согласно фиг. 3. В данном варианте осуществления, как только обороты для торможения двигателем достигают 2200 об/мин, данные обороты поддерживают постоянными на указанном уровне посредством БЭУ 58. Предполагается, что в ином варианте обороты для торможения двигателем можно было бы поддерживать увеличивающимися по мере возрастания скорости транспортного средства, или в противном случае указанные обороты могли бы снижаться.
[0110] В варианте осуществления, который был описан согласно фиг. 2, в котором ТС 10 было оснащено центробежной муфтой 75, БЭУ 58 осуществлял бы управление двигателем 44 таким же образом, какой был рассмотрен выше в отношении фиг. 3 и 4, но вместо управления на основании оборотов вхождения в зацепления шкива, здесь регулирование осуществлялось бы на основании оборотов вхождения в зацепление муфты. Например, если муфта 75 окажется в расцепленном состоянии при полностью отпущенной педали 42 газа и возрастающей скорости вращения ведомого шкива, то БЭУ 58 будет регулировать работу двигателя 44 так, чтобы увеличивать его обороты, когда возрастают обороты ведомого шкива, до тех пор, пока не будут достигнуты обороты вхождения в зацепление муфты, а после того, как произойдет сцепление муфты 75, БЭУ 58 будет управлять работой двигателя 44, чтобы инициировать торможение двигателем.
[0111] Далее, согласно фиг.5, будет описан пример способа, который используется блоком БЭУ 58 для определения заданного значения оборотов холостого хода. В данном варианте осуществления, БЭУ 58 постоянно выполняет определение заданного значения оборотов холостого хода для текущих условий работы ТС 10. Однако, предполагается, что БЭУ 58 мог бы определять заданное значение оборотов холостого хода только, когда существуют определенные условия. Например, предполагается, что БЭУ 58 мог бы определять заданное значение оборотов холостого хода только, когда водитель ТС 10 нажимает на педаль 42 газа менее, чем на определенную величину или полностью отпускает педаль.
[0112] На шаге 200 БЭУ 58 определяет текущие обороты ведомого шкива. БЭУ 58 получает сигналы от датчика 98, который воспринимает частоту вращения заднего ведущего вала 88. На основе этих сигналов БЭУ 58 определяет частоту вращения заднего ведущего вала 88. БЭУ 58 также получает сигнал от датчика 84 положения переключателя передач, который воспринимает положение переключателя 52. На основе этого сигнала БЭУ 58 определяет режим работы трансмиссии 50, и, следовательно, соответствующее передаточное отношение трансмиссии 50. БЭУ 58 вычисляет скорость вращения ведомого шкива на основе частоты вращения заднего ведущего вала 88 и передаточного отношения трансмиссии 50. Как говорилось ранее, также предполагается, что БЭУ 58 мог бы определять скорость вращения ведомого шкива непосредственно по сигналу датчика, воспринимающего обороты ведомого шкива 66 или обороты входного вала 70 трансмиссии; при этом не было бы необходимости определять режим работы трансмиссии 50, чтобы определить скорость вращения ведомого шкива.
[0113] На шаге 202 БЭУ 58 определяет фактические обороты двигателя на основе сигналов, получаемых от датчика 62 оборотов двигателя. Используя фактические обороты двигателя, найденные на шаге 202, на шаге 204 БЭУ 58 определяет целевое передаточное отношение БСТ, соответствующее фактическим оборотам двигателя. Целевое передаточное отношение БСТ определяют по таблице соответствия, или графику, хранящемуся в БЭУ 58 или отдельной памяти, причем определенным фактическим оборотам двигателя соответствует определенное целевое передаточное отношение БСТ. Для значений оборотов двигателя, которые в таблице соответствия находятся между табличными значениями оборотов, соответствующее целевое передаточное отношение БСТ определяют путем интерполяции. Величина целевого передаточного отношения БСТ уменьшается с ростом фактических оборотов двигателя. На шаге 206 БЭУ 58 умножает обороты ведомого шкива, найденные на шаге 200, на целевое передаточное отношение БСТ, найденное на шаге 204. Предполагается, что шаги 204 и 206 могли бы быть опущены.
[0114] Используя фактические обороты двигателя, найденные на шаге 202, на шаге 208 БЭУ 58 определяет смещение оборотов двигателя. Смещение оборотов двигателя определяют по таблице соответствия, или графику, хранящемуся в БЭУ 58 или отдельной памяти, причем определенным фактическим оборотам двигателя соответствует определенное смещение оборотов. Для значений оборотов двигателя, которые в таблице соответствия находятся между табличными значениями оборотов, соответствующее смещение оборотов определяют путем интерполяции. Величина смещения оборотов двигателя увеличивается с ростом фактических оборотов двигателя. На шаге 210 БЭУ 58 вычитает смещение оборотов двигателя, найденное на шаге 208, из результата умножения, полученного на шаге 206. Результатом этого вычитания (на шаге 212) является заданное значение оборотов холостого хода для скорости вращения ведомого шкива, найденной на шаге 200, и фактических оборотов двигателя, найденных на шаге 202, и используемых в способе, описанном выше в отношении фиг.3. Предполагается, что шаги 208 и 210 могли бы быть опущены.
[0115] Значения, которые на фиг.5 указаны для целевого передаточного отношения БСТ и смешения оборотов двигателя, приведены только в качестве одного примера. Указанные значения могут быть определены экспериментально в соответствии с требуемыми характеристиками управляемости ТС 10, причем они будут меняться в зависимости от конкретной конструкции ТС 10, двигателя 44 и БСТ 48.
[0116] Фиг. 6 иллюстрирует другой вариант осуществления силовой передачи ТС 10. Для простоты, компонентам силовой передачи, показанной на фиг.6, которые соответствуют компонентам, ранее описанным согласно фиг.2, присвоены такие же позиционные номера, и эти компоненты повторно рассматриваться не будут.
[0117] В варианте осуществления фиг.6 ТС 10 содержит двигатель 44'. Двигатель 44' содержит выходной вал 60', который выступает назад. Выходной вал 60' функционально соединен с коленчатым валом двигателя 44', например, посредством конических зубчатых колес. ТС 10 содержит трансмиссию 50', которая отнесена на некоторое расстояние от двигателя 44'. Трансмиссия 50' содержит входной вал 70', который выступает вперед. Центробежная муфта 75' установлена между выходным валом 60' двигателя 44' и входным валом 70' трансмиссии 50'. В сущности, в данном варианте осуществления, выходной вал 60' двигателя 44' является входной осью центробежной муфты 75', в входной вал 70' трансмиссии 50' является выходной осью центробежной муфты 75'. При низких скоростях вращения выходного вала центробежная муфта 75' расцеплена, и входной вал 70' трансмиссии 50' может вращаться относительно выходного вала 60' двигателя 44'. Скорость вращения выходного вала, при которой происходит сцепление муфты 75', можно назвать скоростью сцепления муфты. Предполагается, что муфта 75' могла бы напрямую и не соединяться с выходным валом 60' двигателя 44'. В этом случае скоростью сцепления муфты считалась бы скорость входной оси муфты 75', при которой происходит сцепление муфты 75', и существовала бы соответствующая скорость вращения вала двигателя, которая заставляет входную ось муфты 75' вращаться со скоростью сцепления муфты. Например, муфта 75' могла бы быть присоединена между ведомым шкивом БСТ и входным валом трансмиссии. Согласно другому примеру, муфта 75' могла бы быть присоединена между трансмиссией и ведущими валами 86, 88.
[0118] В ТС 10, содержащем данный тип силовой передачи, БЭУ 58 управляет работой двигателя 44' таким же образом, какой описан выше в отношении фиг. 3 и 4, но вместо управления, основанного на скорости сцепления ведущего шкива, оборотах ведомого шкива и оборотах ведущего шкива, данное управление основано на скорости сцепления муфты, оборотах выходной оси муфты 75' (т.е. оборотах входного вала 70' трансмиссии 50') и оборотах входной оси муфты 75' (т.е. оборотах выходного вала 60' двигателя 44') соответственно. Например, если муфта 75' расцеплена при полностью отпущенной педали 42 газа, а обороты выходного вала (т.е. обороты входного вала 70' трансмиссии 50' увеличиваются, БЭУ 58 выполняет управление работой двигателя 44' так, чтобы увеличивать обороты двигателя, когда возрастают обороты выходного вала, до тех пор, пока не будет достигнута скорость сцепления муфты, и после того, как произойдет сцепление муфты 75', БЭУ 58 управляет работой двигателя 44', чтобы инициировать торможение двигателем. Это управление оборотами двигателя с целью инициировать торможение двигателем не зависит от водителя и положения педали газа.
[0119] Специалистам в данной области должна быть очевидной возможность внесения изменений и усовершенствования вышеописанных вариантов осуществления настоящего изобретения. Вышеприведенное описание следует рассматривать, как пример, который не несет характера ограничений. Объем настоящего изобретения ограничивается исключительно только объемом прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ БЕССТУПЕНЧАТОЙ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2680209C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2782720C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2648504C2 |
| СНЕГОХОД | 2013 |
|
RU2719265C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2636249C2 |
| Система управления сцеплением трансмиссии автомобиля | 1983 |
|
SU1384193A3 |
| СПОСОБ И СИСТЕМА ДЛЯ ОГРАНИЧЕНИЯ ПРОСКАЛЬЗЫВАНИЯ РЕМНЯ В ВАРИАТОРЕ | 2012 |
|
RU2632388C2 |
| МУФТА ПРИВОДА БЕССТУПЕНЧАТОЙ ТРАНСМИССИИ | 2014 |
|
RU2622510C1 |
| ГИБРИДНЫЙ ПРИВОД ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА, В ЧАСТНОСТИ, ДЛЯ МОТОРОЛЛЕРА, И ТРАНСПОРТНОЕ СРЕДСТВО | 2003 |
|
RU2334625C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ПРИВОДНОГО АГРЕГАТА ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2666088C2 |
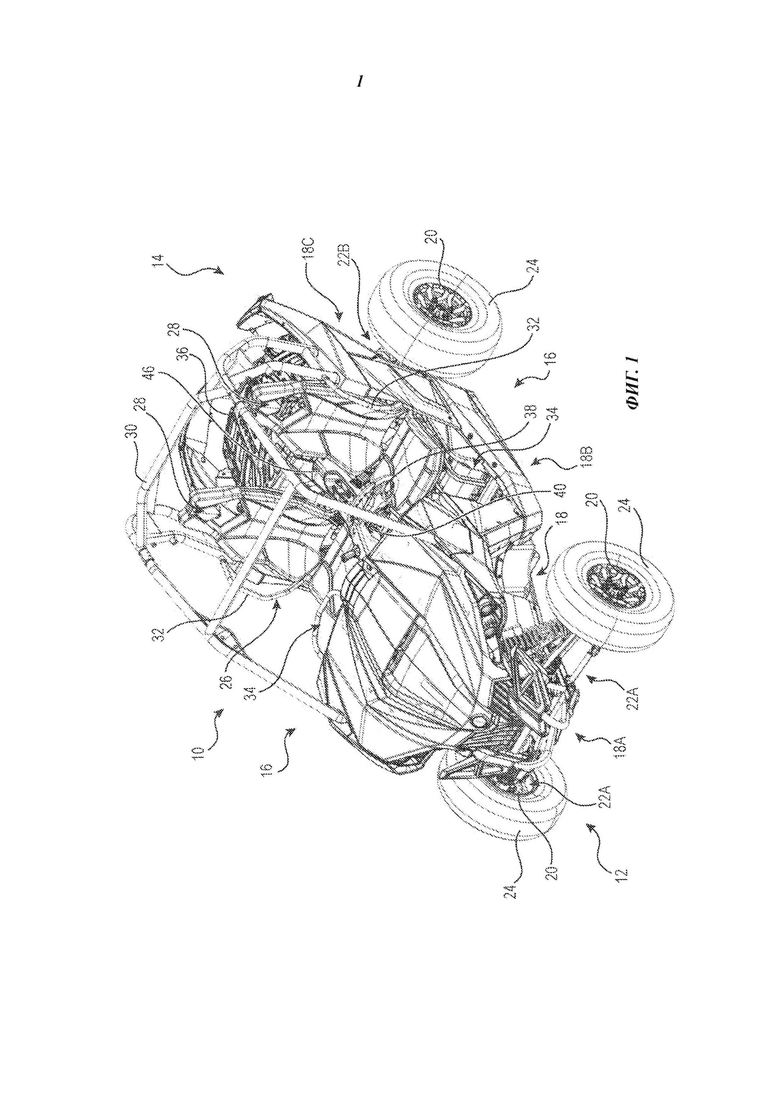
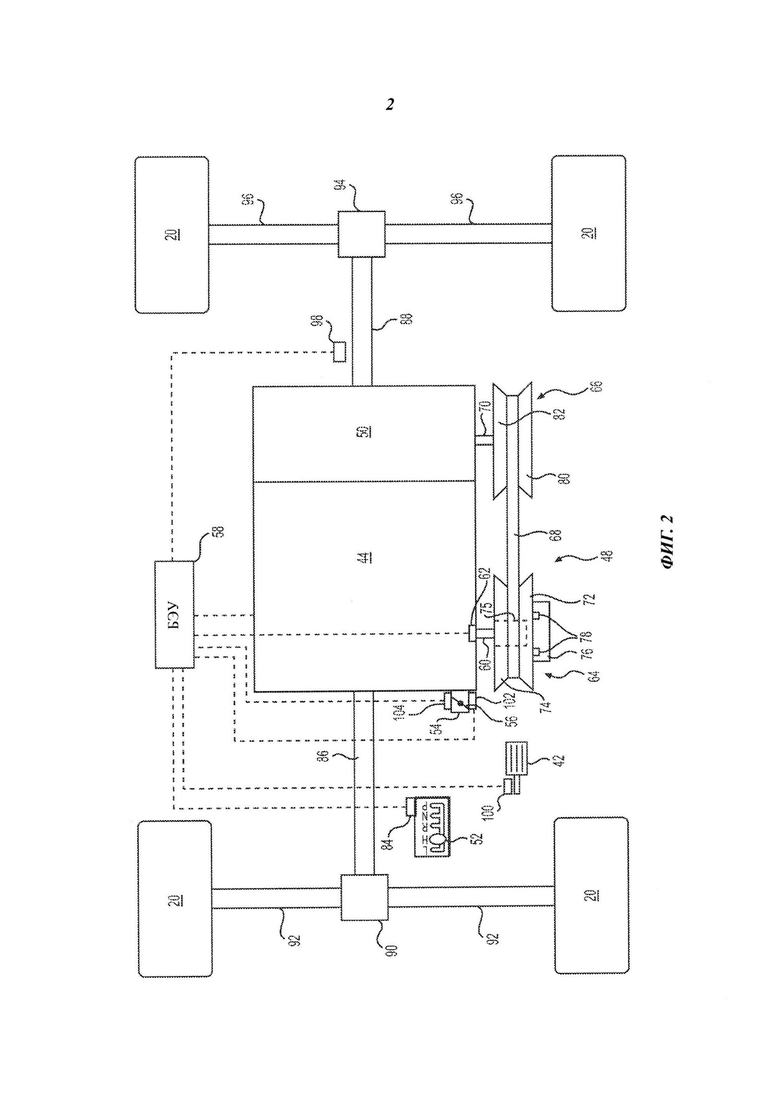




Изобретение относится к транспортным средствам. В способе управления двигателем внутреннего сгорания транспортного средства с бесступенчатой трансмиссией, которая содержит обернутый вокруг ведущего и ведомого шкивов ремень, определяют первую скорость, пропорциональную оборотам ведомого шкива; определяют значение оборотов холостого хода, основанное частично на первой скорости. Заданное значение оборотов холостого хода меньше скорости сцепления, когда обороты ведомого шкива меньше заданных оборотов ведомого шкива. Заданное значение оборотов холостого хода меньше оборотов двигателя, когда обороты ведомого шкива больше заданных оборотов ведомого шкива. Определяют требуемые обороты двигателя и управляют им, когда требуемые обороты двигателя меньше заданного значения оборотов холостого хода. Управляют двигателем для работы при условиях, соответствующих заданному значению оборотов холостого хода, инициируя торможение двигателем, когда обороты ведомого шкива больше заданных оборотов ведомого шкива. Улучшается эффективность торможения двигателем. 2 н. и 19 з.п ф-лы, 6 ил.
1. Способ управления двигателем внутреннего сгорания транспортного средства, содержащего:
двигатель внутреннего сгорания;
бесступенчатую трансмиссию (БСТ), содержащую:
ведущий шкив, функционально связанный с двигателем;
ведомый шкив;
ремень, обернутый вокруг ведущего и ведомого шкивов и передающий крутящий момент между ведущим и ведомым шкивами; и
по меньшей мере один элемент, контактирующий с грунтом и функционально связанный с ведомым шкивом;
данный способ содержит следующее:
определяют первую скорость, пропорциональную оборотам ведомого шкива,
определяют заданное значение оборотов холостого хода, основанное по меньшей мере частично на первой скорости, причем
заданное значение оборотов холостого хода меньше скорости сцепления, когда обороты ведомого шкива меньше заданных оборотов ведомого шкива,
заданное значение оборотов холостого хода меньше фактических оборотов двигателя, когда обороты ведомого шкива больше заданных оборотов ведомого шкива,
определяют требуемые обороты двигателя; и
управляют двигателем для работы при условиях, соответствующих заданному значению оборотов холостого хода, когда требуемые обороты двигателя меньше заданного значения оборотов холостого хода,
управляют двигателем для работы при условиях, соответствующих заданному значению оборотов холостого хода, инициируя торможение двигателем, когда обороты ведомого шкива больше заданных оборотов ведомого шкива.
2. Способ по п. 1, в котором заданное значение оборотов холостого хода больше, чем скорость сцепления, когда обороты ведомого шкива больше заданных оборотов ведомого шкива.
3. Способ по п. 1 или 2, в котором, когда обороты ведомого шкива меньше заданных оборотов ведомого шкива, заданное значение оборотов холостого хода возрастает с ростом оборотов ведущего шкива.
4. Способ по любому из пп. 1-3, в котором определение заданного значения оборотов холостого хода содержит следующее:
умножают обороты ведомого шкива на целевое передаточное отношение БСТ.
5. Способ по п. 4, в котором определение заданного значения оборотов холостого хода дополнительно содержит следующее:
вычитают смещение оборотов двигателя из результата умножения оборотов ведомого шкива на целевое передаточное отношение БСТ.
6. Способ по п. 5, в котором целевое передаточное отношение БСТ основано на фактических оборотах двигателя.
7. Способ по п. 5 или 6, в котором смещение оборотов двигателя возрастает при увеличении фактических оборотов двигателя.
8. Способ по любому из пп. 1-7, в котором транспортное средство дополнительно содержит зубчатую передачу, функционально соединяющую по меньшей мере один контактирующий с грунтом элемент с ведомым шкивом;
причем указанная первая скорость представляет собой скорость вращающегося элемента, функционально соединяющего зубчатую передачу с указанным по меньшей мере одним контактирующим с грунтом элементом;
причем способ дополнительно содержит определение режима привода зубчатой передачи; и
причем обороты ведомого шкива определяют путем умножения указанной первой скорости на передаточное отношение, соответствующее режиму привода.
9. Способ по любому из пп. 1-8, дополнительно содержащий определение положения органа управления дросселем; и
причем требуемые обороты двигателя зависят, по меньшей мере частично, от положения органа управления дросселем.
10. Способ по п. 1, в котором управление двигателем для работы при условиях, соответствующих заданному значению оборотов холостого хода, когда обороты ведомого шкива превышают заданный диапазон оборотов ведомого шкива, содержит следующее:
устанавливают заслонку, управляющую подачей воздуха в двигатель в положение, которое обеспечивает меньшую подачу, чем было бы необходимо для работы двигателя с фактическими оборотами.
11. Способ по п. 10, в котором указанной заслонкой является дроссельная заслонка в корпусе дросселя.
12. Способ по любому из пп. 1-11, дополнительно содержащий определение фактических оборотов двигателя.
13. Способ по п. 12, в котором определение фактических оборотов двигателя включает в себя определение скорости вращения ведущего вала, функционально соединяющего двигатель с по меньшей мере одним контактирующим с грунтом элементом.
14. Способ по п. 12, в котором определение фактических оборотов двигателя включает в себя определение скорости транспортного средства.
15. Способ по любому из пп. 1-14, в котором указанная скорость сцепления представляет собой обороты вхождения в зацепление ведущего шкива.
16. Способ по любому из пп. 1-15, в котором транспортное средство дополнительно содержит центробежную муфту, функционально связывающую ведущий шкив с двигателем; и
причем указанная скорость сцепления представляет собой обороты вхождения в зацепление муфты.
17. Способ управления двигателем внутреннего сгорания транспортного средства, содержащего:
двигатель внутреннего сгорания;
бесступенчатую трансмиссию (БСТ), содержащую:
ведущий шкив, функционально связанный с двигателем;
ведомый шкив; и
ремень, обернутый вокруг ведущего и ведомого шкивов и передающий крутящий момент между ведущим и ведомым шкивами; и
по меньшей мере один контактирующий с грунтом элемент, функционально связанный с ведомым шкивом;
данный способ содержит следующее:
определяют первую скорость, пропорциональную оборотам ведомого шкива;
определяют заданное значение оборотов холостого хода, основанное по меньшей мере частично на первой скорости, причем
заданное значение оборотов холостого хода меньше скорости сцепления, когда обороты ведомого шкива меньше заданных оборотов ведомого шкива,
заданное значение оборотов холостого хода меньше фактических оборотов двигателя, когда обороты ведомого шкива больше заданных оборотов ведомого шкива; и
управляют двигателем для работы при условиях, соответствующих заданному значению оборотов холостого хода, когда требуемые обороты двигателя меньше заданного значения оборотов холостого хода.
18. Способ по п. 17, дополнительно содержащий следующее:
определяют требуемые обороты двигателя; и
управляют двигателем для работы при условиях, соответствующих заданному значению оборотов холостого хода, инициируя торможение двигателем, когда обороты ведомого шкива больше заданных оборотов ведомого шкива.
19. Способ по п. 18, дополнительно содержащий определение положения органа управления дросселем; и
причем требуемые обороты двигателя основаны по меньшей мере частично на указанном положении органа управления дросселем.
20. Способ по любому из пп. 17-19, в котором транспортное средство дополнительно содержит зубчатую передачу, функционально соединяющую по меньшей мере один контактирующий с грунтом элемент с ведомым шкивом;
причем указанная первая скорость представляет собой скорость вращающегося элемента, функционально соединяющего зубчатую передачу с указанным по меньшей мере одним контактирующим с грунтом элементом,
причем данный способ дополнительно содержит определение режима привода зубчатой передачи; и
причем обороты ведомого шкива определяют путем умножения указанной первой скорости на передаточное отношение, соответствующее режиму привода.
21. Способ по любому из пп. 17-20, в котором управление двигателем для работы в условиях, соответствующих заданному значению оборотов холостого хода, когда обороты ведомого шкива превышают заданный диапазон оборотов ведомого шкива, содержит следующее:
устанавливают заслонку, управляющую подачей воздуха в двигатель, в положение, которое обеспечивает меньшую подачу, чем было бы необходимо для работы двигателя с фактическими оборотами двигателя.
| US 5056637 A, 15.10.1991 | |||
| US 2002152989 A1, 24.10.2002 | |||
| US 4680987 A, 21.07.1987 | |||
| US 7072754 B1, 04.07.2006 | |||
| US 6149540 А, 21.11.2000. |

