ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение в целом относится к способам и системам для ограничения проскальзывания ремня в вариаторе.
УРОВЕНЬ ТЕХНИКИ
[0002] Вариаторы (CVT), содержащие ведущий шкив и ведомый шкив, соединенные бесконечным ремнем, используются в колесных и рельсовых транспортных средствах различных видов для передачи мощности от двигателя к колесам или гусеничным лентам транспортного средства. Максимальный крутящий момент, выработанный двигателем, зависит от частоты вращения двигателя, в целом является более высоким для пониженных оборотов двигателя. Крутящий момент, требующийся колесам или гусеничным лентам, увеличивается с нагрузкой на транспортное средство. Например, крутящий момент, требующийся для перемещения транспортного средства, больше при движении в гору или при старте из неподвижного положения.
[0003] Каждый шкив имеет пару противоположных конусных дисков (по меньшей мере один из которых выполнен с возможностью перемещения), удерживающих ремень между собой. Противоположные конусные диски шкива прикладывают сжимающую силу к ремню для поддерживания взаимодействия с ремнем таким образом, чтобы вращательное движение ведущего шкива могло быть передано ведомому шкиву. Сжимающая сила, приложенная к ремню конусными дисками ведущего шкива, определяется несколькими факторами. В простом механическом вариаторе сжимающая сила генерируется набором вращающихся центробежных грузиков, соединенных с одним из конусных дисков ведущего шкива. Таким образом, сжимающая сила увеличивается с увеличением скорости вращения ведущего шкива. Сжимающая сила, приложенная к ремню, таким образом, также зависит от крутящего момента двигателя. Несмотря на то, что масса центробежного грузика и/или скорость вращения шкива могут быть увеличены для получения повышенных сжимающих сил, эти параметры могут быть изменены только в некоторых пределах без изменения общих рабочих характеристик транспортного средства. В вариаторах некоторых типов сжимающей силой управляет гидравлическая, электрическая или пневматическая система, выборочно прикладывающая наружную силу к конусным дискам ведущего шкива. В этих принудительных вариаторах размер усиливающих систем и, следовательно, величина сжимающей силы, выработанной таким образом, являются ограниченными из-за ограничения пространства.
[0004] Независимо от механизма, вырабатывающего силу, которая сжимает ремень, требуется минимальная сжимающая сила для препятствования проскальзыванию ремня относительно конусных дисков ведущего шкива. Когда сжимающая сила, приложенная к ремню, меньше, чем минимальная требуемая сжимающая сила, ремень начинает скользить относительно конусных дисков ведущего шкива. Ремень, перемещающийся относительно конусных дисков шкива, вырабатывает значительное количество тепла, которое потенциально может привести к образованию "пятен" (залысин) на ремне, если материал на поверхности ремня (прежде всего, выполненного из резины), в особенности в тех частях ремня, которые находятся в контакте с конусными дисками ведущего шкива, плавится под действием чрезмерного нагрева. Ремень, имеющий такие "залысины", не может работать гладко, поскольку он больше не является равномерным и, таким образом, требует заменены.
[0005] Кроме того, поскольку ремень начинает скользить, и транспортное средство начинает замедляться или неспособно начать движение, водитель транспортного средства иногда отвечает дополнительным открыванием дроссельной заслонки, заставляя конусные диски ведущего шкива вращаться еще быстрее с дополнительным увеличением количества тепла, выработанного трением ремня на конусных дисках шкива, и, следовательно, усугубляет ситуацию. Таким образом, такая реакция на скольжение ремня фактически увеличивает риск образования залысин на ремне.
[0006] Таким образом, имеется потребность в системе и способе ограничения скольжения ремня вариатора и препятствования повреждению скользящего ремня.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0007] Задача настоящего изобретения состоит в облегчении по меньшей мере некоторых недостатков уровня техники.
[0008] В одном аспекте настоящего изобретения предложен способ ограничения проскальзывания ремня в вариаторе (CVT) транспортного средства, функционально соединенном с двигателем. Способ включает этапы, согласно которым: определяют скорость скольжения ремня вариатора, определяют накопленную энергию на основании скорости скольжения ремня и крутящего момента, вырабатываемого двигателем, и управляют крутящим моментом двигателя в режиме вмешательства, если накопленная энергия больше, чем пороговая энергия. Управление крутящим моментом двигателя в режиме вмешательства включает управление по меньшей мере одним из: циклического изменения крутящего момента двигателя и ограничения крутящего момента двигателя.
[0009] В другом аспекте способ включает определение скольжения ремня вариатора относительно ведущего шкива вариатора перед определением накопленной энергии.
[0010] В другом аспекте ремень вариатора определен как проскальзывающий, если: скорость транспортного средства меньше, чем пороговая скорость транспортного средства, трансмиссия транспортного средства находится в положении повышенной передачи, и исполнительно-приводной механизм дроссельной заслонки транспортного средства установлен в положении исполнительно-приводного механизма дроссельной заслонки, которое больше, чем пороговое положение исполнительно-приводного механизма дроссельной заслонки.
[0011] В другом аспекте накопленную энергию сбрасывают в ноль, если скорость транспортного средства больше, чем пороговая скорость транспортного средства.
[0012] В другом аспекте накопленную энергию сбрасывают в ноль, если трансмиссия транспортного средства находится в положении пониженной передачи.
[0013] В другом аспекте накопленную энергию сбрасывают в ноль, если исполнительно-приводной механизм дроссельной заслонки транспортного средства установлен в положение исполнительно-приводного механизма дроссельной заслонки, которое ниже, чем пороговое положение исполнительно-приводного механизма дроссельной заслонки.
[0014] В другом аспекте управление крутящим моментом двигателя в режиме вмешательства включает управление крутящим моментом двигателя на основании положения исполнительно-приводного механизма дроссельной заслонки, установленного водителем транспортного средства. Согласно некоторым из вариантов реализации управление крутящим моментом двигателя в режиме вмешательства включает: циклическое изменение крутящего момента двигателя, если положение исполнительно-приводного механизма дроссельной заслонки, установленное водителем, больше, чем первое пороговое положение исполнительно-приводного механизма дроссельной заслонки, и ограничение крутящего момента двигателя, если положение исполнительно-приводного механизма дроссельной заслонки, установленное водителем, больше, чем второе пороговое положение исполнительно-приводного механизма дроссельной заслонки. Крутящий момент двигателя циклически изменяют для обеспечения колебания относительно среднего крутящего момента двигателя, причем средний крутящий момент двигателя определяют на основании положения исполнительно-приводного механизма дроссельной заслонки. Второе пороговое положение исполнительно-приводного механизма дроссельной заслонки больше, чем первое пороговое положение исполнительно-приводного механизма дроссельной заслонки.
[0015] В другом аспекте задают значение первого порогового положения исполнительно-приводного механизма дроссельной заслонки, составляющее 5% от максимального положения исполнительно-приводного механизма дроссельной заслонки.
[0016] В другом аспекте задают значение второго порогового положения исполнительно-приводного механизма дроссельной заслонки, составляющее 50% от максимального положения исполнительно-приводного механизма дроссельной заслонки.
[0017] В еще одном аспекте управление крутящим моментом двигателя в режиме вмешательства включает циклическое изменение крутящего момента двигателя для обеспечения колебания около требуемого крутящего момента, причем амплитуда колебаний выбрана с возможностью вырабатывания качающегося перемещения транспортного средства.
[0018] В другом аспекте скорость увеличения среднего крутящего момента двигателя уменьшается, если положение исполнительно-приводного механизма дроссельной заслонки больше, чем первое пороговое положение исполнительно-приводного механизма дроссельной заслонки.
[0019] В другом аспекте ограничение крутящего момента двигателя включает по меньшей мере одно из ограничения подачи воздуха в двигатель и ограничения впрыска топлива в двигатель.
[0020] В другом аспекте циклическое изменение крутящего момента двигателя включает циклическое изменение угла опережения зажигания двигателя.
[0021] В другом аспекте управление крутящим моментом двигателя в режиме вмешательства дополнительно включает показ водителю транспортного средства по меньшей мере одного из указания относительно скольжения ремня вариатора и рекомендации о переключении передачи.
[0022] В другом аспекте способ включает прекращение управления крутящим моментом двигателя в режиме вмешательства, если скорость транспортного средства больше, чем пороговая скорость транспортного средства.
[0023] В другом аспекте способ включает прекращение управления крутящим моментом двигателя в режиме вмешательства, если исполнительно-приводной механизм дроссельной заслонки установлен в положении ниже порогового положения исполнительно-приводного механизма дроссельной заслонки.
[0024] В еще одном аспекте способ включает прекращение управления крутящим моментом двигателя в режиме вмешательства, если исполнительно-приводной механизм дроссельной заслонки установлен в положение ниже порогового положения исполнительно-приводного механизма дроссельной заслонки в период времени, по меньшей мере равный пороговому значению времени исполнительно-приводного механизма дроссельной заслонки.
[0025] В другом аспекте способ включает прекращение управления крутящим моментом двигателя в режиме вмешательства, если активирован переключатель блокирования вмешательства.
[0026] В другом аспекте настоящего изобретения предложен способ ограничения проскальзывания ремня в вариаторе (CVT) транспортного средства, функционально соединенном с двигателем. Способ включает определение скорости скольжения ремня вариатора, определение накопленной энергии на основании скорости скольжения ремня и крутящего момента двигателя, выработанного двигателем, и управление крутящим моментом двигателя в режиме вмешательства, если накопленная энергия больше, чем пороговая энергия. Управление крутящим моментом двигателя в режиме вмешательства включает циклическое изменение крутящего момента двигателя, если положение исполнительно-приводного механизма дроссельной заслонки больше, чем первое пороговое положение исполнительно-приводного механизма дроссельной заслонки, и ограничение крутящего момента двигателя, если исполнительно-приводной механизм дроссельной заслонки установлен в положение, которое больше, чем второе пороговое положение исполнительно-приводного механизма дроссельной заслонки. Крутящий момент двигателя циклически изменяют для колебания относительно среднего крутящего момента двигателя, причем средний крутящий момент двигателя выбран на основании положения исполнительно-приводного механизма дроссельной заслонки. Второе пороговое положение исполнительно-приводного механизма дроссельной заслонки больше, чем первое пороговое положение исполнительно-приводного механизма дроссельной заслонки. Способ также включает прекращение управления крутящим моментом двигателя в режиме вмешательства, если выполнено любое из следующих условий: скорость транспортного средства больше, чем пороговая скорость транспортного средства, и исполнительно-приводной механизм дроссельной заслонки транспортного средства установлен в положение, которое ниже, чем первое пороговое положение исполнительно-приводного механизма дроссельной заслонки.
[0027] В другом аспекте настоящего изобретения предложено транспортное средство, содержащее раму и двигатель, удерживаемый рамой. Двигатель содержит дроссель для управления подачей воздуха в двигатель, топливный инжектор для управления впрыском топлива в двигатель и свечу зажигания. Транспортное средство также содержит: управляющий блок, соединенный с двигателем, для управления крутящим моментом, вырабатываемым двигателем; исполнительно-приводной механизм дроссельной заслонки, соединенный с дросселем и выполненный с возможностью перемещения между множеством положений исполнительно-приводного механизма дроссельной заслонки. Исполнительно-приводной механизм дроссельной заслонки соединен с управляющим блоком и передает управляющему блоку сигнал положения исполнительно-приводного механизма дроссельной заслонки, указывающий положение исполнительно-приводного механизма дроссельной заслонки. Также предложенное транспортное средство содержит ведущий вал, функционально соединенный с двигателем, и вариатор (CVT), содержащий: ведущий шкив, соединенный с ведущим валом и вращающийся вместе с ним, ведомый шкив и ремень, соединяющий ведущий шкив и ведомый шкив. Ведомый вал соединен с ведомым шкивом и вращается вместе с ним. Взаимодействующий с землей элемент функционально соединен с ведомым валом. Трансмиссия функционально соединяет вариатор с взаимодействующим с землей элементом посредством множества передач. Селектор передач соединен с трансмиссией для выбора одной из множества передач трансмиссии, причем селектор передач соединен с управляющим блоком и передает ему сигнал переключения передач, указывающий выбранную передачу. Датчик скорости транспортного средства распознает скорость вращения одного из: ведомого шкива, взаимодействующего с землей элемента и элемента, подсоединенного между ведомым шкивом и взаимодействующим с землей элементом. Датчик скорости транспортного средства соединен с управляющим блоком для передачи ему сигнала скорости транспортного средства, указывающего скорость транспортного средства. Управляющий блок определяет скорость транспортного средства и скорость ведомого шкива по меньшей мере частично на основании сигнала скорости транспортного средства. Датчик оборотов двигателя распознает скорость вращения одного из: двигателя, ведущего шкива и элемента, соединенного между двигателем и ведущим шкивом. Датчик оборотов двигателя соединен с управляющим блоком для передачи ему сигнала оборотов двигателя, указывающего число оборотов двигателя. Управляющий блок определяет число оборотов двигателя, крутящий момент двигателя и скорость ведущего шкива по меньшей мере частично на основании сигнала оборотов двигателя. Управляющий блок управляет крутящим моментом двигателя в режиме вмешательства, если ремень вариатора скользит относительно ведущего шкива. Управляющий блок управляет крутящим моментом двигателя в режиме вмешательства на основании сигнала оборотов двигателя, сигнала скорости транспортного средства, сигнала положения исполнительно-приводного механизма дроссельной заслонки и сигнала переключения передач. Управляющий блок управляет крутящим моментом двигателя в режиме вмешательства путем выполнения по меньшей мере одного из циклического изменения угла опережения зажигания, ограничения подачи воздуха в двигатель и ограничения впрыска топлива в двигатель. Управляющий блок управляет крутящим моментом двигателя в режиме вмешательства путем передачи по меньшей мере одного из сигнала угла опережения зажигания к свече зажигания, управляющего сигнала дроссельной заслонки к дроссельной заслонке и сигнала регулирования непосредственного впрыскивания топлива топливному инжектору.
[0028] В целях настоящей заявки, термины, относящиеся к пространственной ориентации транспортного средства и компонентов относительно транспортного средства, такие как "вперед", "назад", "влево", "вправо", "над" и "под", применены как они могли бы быть поняты водителем транспортного средства, расположенного в прямой передней ориентации (т.е., не поворачивающего влево или вправо) и в вертикальном положении (т.е., без наклона).
[0029] Каждый из вариантов реализации настоящего изобретения имеет по меньшей мере одну из вышеуказанных задач и/или аспектов, но не обязательно все одновременно. Разумеется, некоторые аспекты настоящего изобретения,
вытекающие из стремления достичь вышеуказанной задачи, могут не удовлетворять этой задаче и/или могут удовлетворять другие задачи, не описанные конкретно в настоящей заявке.
[0030] Дополнительные и/или альтернативные особенности, аспекты и преимущества вариантов реализации настоящего изобретения станут очевидными из следующего ниже подробного описания, сопроводительных чертежей и пунктов приложенной формулы.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0031] Для улучшенного понимания настоящего изобретения, а также других его аспектов и дополнительных особенностей ниже сделана ссылка на следующее подробное описание, которое должно использоваться вместе с сопроводительными чертежами, на которых:
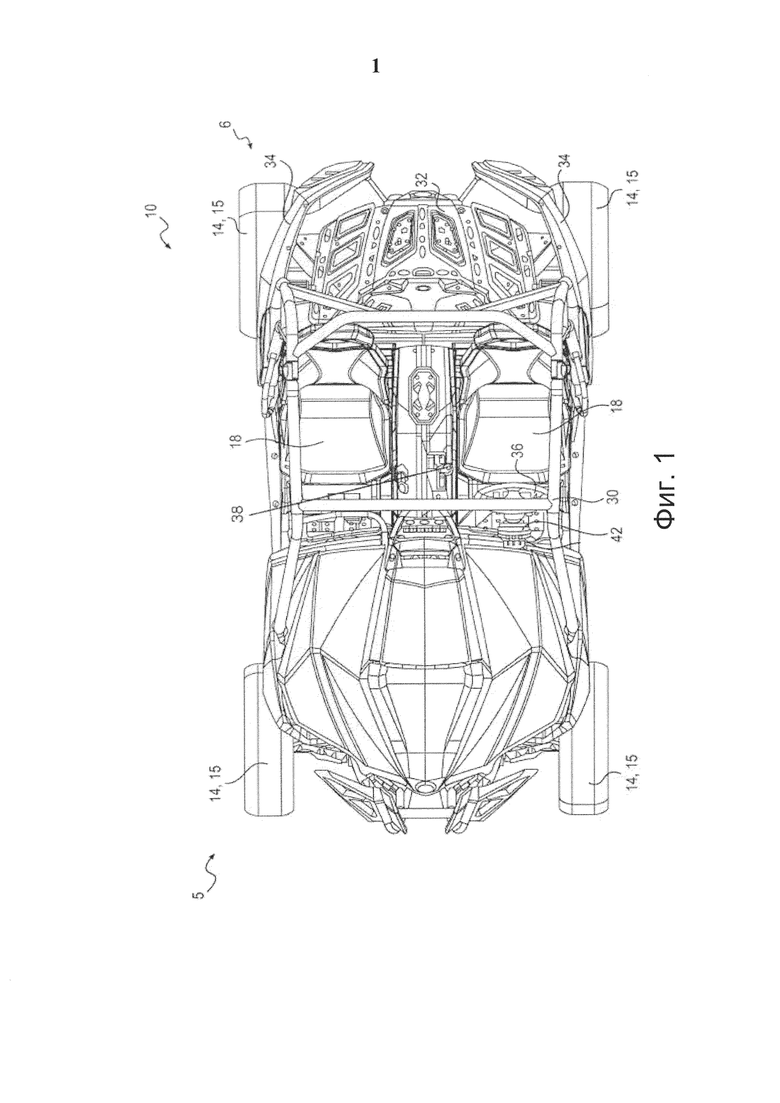
[0032] На фиг. 1 показан вид сверху мотовездехода (SSV);
[0033] На фиг. 2 показан вид сверху трансмиссии мотовездехода, показанного на фиг. 1;
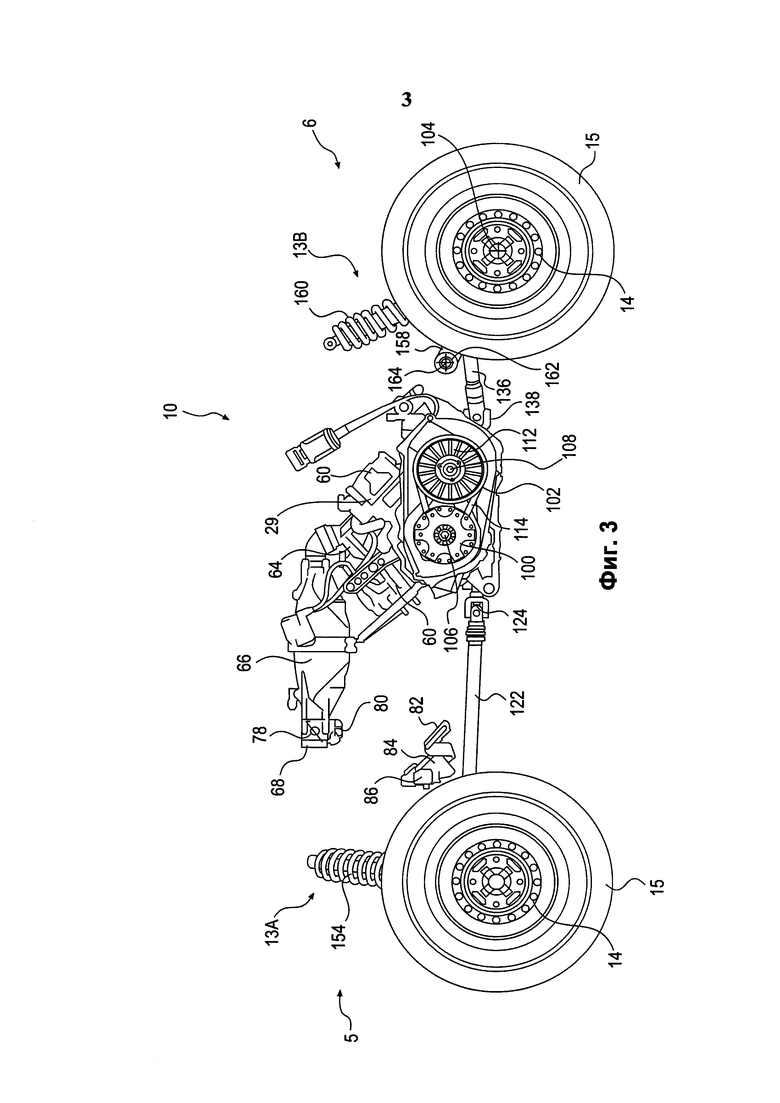
[0034] На фиг. 3 показан вид слева трансмиссии, показанной на фиг. 2;
[0035] На фиг. 4 показана схема компонентов управляющей системы мотовездехода, показанного на фиг. 1А;
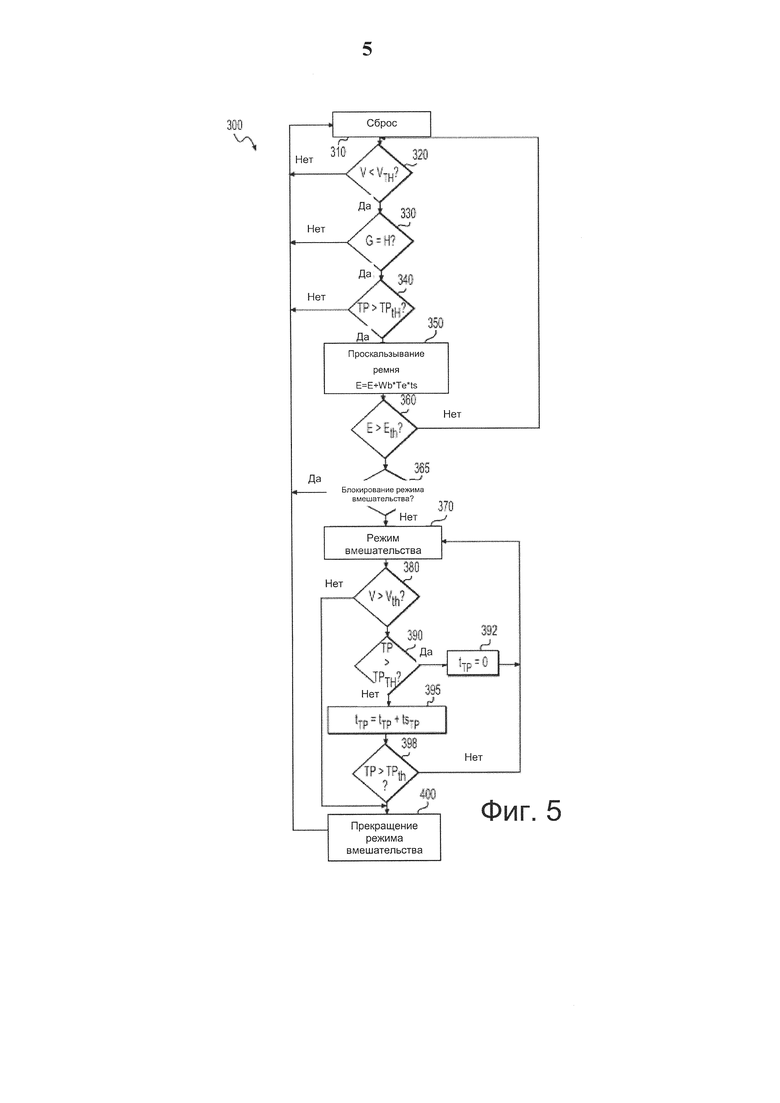
[0036] На фиг. 5 показана логическая схема способа ограничения проскальзывания ремня в вариаторе трансмиссии, показанной на фиг. 2; и
[0037] На фиг. 6 показан график, иллюстрирующий крутящий момент двигателя, показанного на фиг. 2, показывающий крутящий момент двигателя, которым управляют в режиме вмешательства, в зависимости от положения педали дроссельной заслонки.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0038] Варианты реализации настоящего изобретения ниже будут описаны на примере мотовездехода (SSV). Однако, предполагается, что аспекты вариантов реализации настоящего изобретения также могут быть использованы для других колесных или гусеничных транспортных средств, включая вариаторные (CVT), такие как снегоходы, мотоциклы, вездеходы, и т.п.
[0039] На фиг. 1 показан мотовездеход 10, имеющий передний конец 5 и задний конец 6. Мотовездеход 10 содержит раму 12, на которой установлен кузов транспортного средства. Пара передних колес 14 подвешены к передней части рамы 12 посредством передних подвесок 13А. Пара задних колес 14 подвешены к задней части рамы 12 посредством задних подвесок 13В. Каждое из указанных четырех колес 14 содержит шину 15. Также предполагается, что мотовездеход 10 может иметь шесть или большее количество колес.
[0040] Кабина 22 расположена в средней части рамы 12. Кабина 22 содержит два сидения 18, установленные в боковом направлении рядом друг с другом на раме 12, для размещения водителя и пассажира (ездоков) мотовездехода 10 соответственно. Кабина 22 открыта с двух боковых сторон 7 мотовездехода 10 и образует два боковых прохода 24, через которые ездоки могут входить в мотовездеход 10 и выходить из него. Боковая дверца (не показана), выборочно расположенная поперек каждого бокового прохода 24, может быть открыта для освобождения бокового прохода 24 для выхода или входа. Защитный каркас 30 соединен с рамой 12 и расположен над кабиной 22. Багажник 32, расположенный позади сидений 18, частично окружен двумя боковыми панелями 34 кузова.
[0041] Двигатель 29 внутреннего сгорания (показанный на фиг. 2) установлен в средней части рамы 12 между сидениями 18. Приборная панель 23, расположенная между сидениями 18, закрывает двигатель 29 и отделяет двигатель 29 от водителя и пассажира. Приборная панель 23 частично образует центральный охлаждающий туннель, обеспечивающий возможность протекания воздуха от переднего конца 5 транспортного средства 10 к заднему концу 6 транспортного средства для охлаждения двигателя 29.
[0042] Узел рулевого управления содержит рулевое колесо 36, расположенное перед сидением 18 водителя. Узел рулевого управления функционально соединен с двумя передними колесами 14 для обеспечения возможности управления мотовездеходом 10. Также могут быть использованы рулевые механизмы помимо рулевого колеса, например, рулевой рычаг.
[0043] Рукоятка 38 избирателя механизма переключения передач, расположенная между водительским и пассажирским сидениями и выполненная с возможностью нахождения в положениях Р, N, R, L, Н, соответственно соответствующих парковке, нейтральному положению коробки скоростей, задней передаче, пониженной и повышенной передачам, предоставляет водителю мотовездехода 10 возможность переключать передачу. Предполагается, что последовательность передач может быть различной. Рукоятка 38 переключателя передач соединена с трансмиссией 116 для осуществления переключения передач.
[0044] Педаль 40 дроссельной заслонки (показанная на фиг. 2) расположена перед сидением 18 водителя над полом кабины 22 под рулевым колесом 36. Водитель мотовездехода может нажимать на педаль 40 дроссельной заслонки для увеличения мощности, доставленной двигателем 29. Впуском воздуха в двигатель 29 управляют частично на основании положения педали 40 дроссельной заслонки. Предполагается, что транспортное средство 10 может быть оборудовано механизмами управления дроссельной заслонкой других типов, например, ручным рычагом дроссельной заслонки.
[0045] Один или большее количество приборных индикаторов 42, расположенных перед водительским сидением 18, показывают информацию, такую как скорость транспортного средства, частота вращения двигателя, температура двигателя и т.п., водителю и/или пассажиру мотовездехода 10.
[0046] Предусмотрен переключатель 44 блокирования вмешательства (показанный на фиг. 4), который может быть активирован водителем мотовездехода 10 для блокирования вмешательства, как описано более подробно ниже. Переключатель 44 блокирования вмешательства выполнен в форме кнопки, но предполагается, что он может быть выполнен в форме переключателя, маховичка или другого средства пользовательского управления.
[0047] Как показано на фиг. 2 и 3, трансмиссия мотовездехода 10 содержит двигатель 29, вариатор (CVT) 102 и трансмиссию 116.
[0048] В показанном на чертеже варианте реализации мотовездехода 10 двигатель 29 является двигателем V-образного типа, имеющим два цилиндра 60. Цилиндры 60 расположены под углом друг к другу. Каждый цилиндр 60 имеет впускной канал (не показан), соединенный с системой для впуска воздуха, доставляющей воздух в двигатель 29. Каждый цилиндр 60 содержит топливный инжектор 206 (показан на фиг. 4), впрыскивающий топливо в двигатель 29, и свечу 204 зажигания (показана фиг. 4), воспламеняющую топливно-воздушную смесь для инициирования цикла сгорания. Каждый цилиндр 60 имеет выпускной канал (не показан), соединенный с выпускным коллектором (не показан), через который выхлопные газы удаляются из двигателя 29. Двигатель 29 соединен с управляющим блоком 88, предназначенным для управления работой двигателя 29. Предполагается, что могут быть использованы двигатели внутреннего сгорания других типов, таких как, например, рядный двигатель. Также предполагается, что двигатель 29 может иметь больше чем два цилиндра 60.
[0049] Система для впуска воздуха включает впускной коллектор 64, накопительную камеру 66, соединенную выше по ходу потока впускного коллектора 64, и корпус 68 дроссельной заслонки, соединенный выше по ходу потока впускного трубопровода 66. Когда двигатель 29 работает, воздух протекает последовательно через корпус 68 дроссельной заслонки, накопительную камеру 66, впускной коллектор 64 и затем через впускные каналы в цилиндры 60 двигателя 29. Впускной коллектор 64 делит поток воздуха из впускного трубопровода 66 на две ветви, причем каждая из ветвей соединена с воздухозаборным отверстием соответствующего цилиндра 60, 62 двигателя 29. Накопительная камера 66 уравнивает давление воздуха, входящего в цилиндры 60, и также действует в качестве акустического глушителя для ослабления шума, генерируемого двигателем 29.
[0050] Корпус 68 дроссельной заслонки регулирует поток воздуха, поступающего в двигатель 29. Корпус 68 дроссельной заслонки содержит дроссельную пластину 78 (схематично показанную на фиг. 2). Регулирование положения дроссельной пластины 78 внутри корпуса 68 регулирует количество воздуха, проходящего сквозь корпус 68 дроссельной заслонки в двигатель 29. Электродвигатель 80 установлен с правой стороны корпуса 68 дроссельной заслонки. Электродвигатель 80 функционально соединен с дроссельной заслонкой 78 для поворачивания пластины 78 внутри корпуса 68 дроссельной заслонки.
[0051] Электродвигатель 80 регулирует положение дроссельной пластины 78 по меньшей мере частично на основании положения TP педали 40 дроссельной заслонки транспортного средства 10. Датчик 86 положения педали дроссельной заслонки распознает положение педали 40 дроссельной заслонки и передает сигнал положения педали дроссельной заслонки, представляющий это положение, управляющему блоку 88. Управляющий блок 88 передает электродвигателю 80 сигнал регулирования открывания дроссельной пластины 78 корпуса 68 дроссельной заслонки. Датчик 90 дроссельной пластины измеряет положение дроссельной пластины в корпусе дроссельной заслонки и передает сигнал положения дроссельной пластины, представляющий это положение, управляющему блоку 88.
[0052] Мощность двигателя, крутящий момент и частота вращения двигателя частично определяются топливовоздушной смесью в двигателе 29 и углом опережения зажигания. Таким образом, управляющий блок 88 регулирует впрыск топлива в двигатель 29, а также угол опережения зажигания путем управления работой топливных инжекторов 206 и свечи 206 зажигания.
[0053] Двигатель 29 приводит в движение колеса 14 посредством вариатора 102 и трансмиссии 116.
[0054] Вариатор 102 расположен в левой части двигателя 29. Вариатор 102 содержит ведущий шкив 110, расположенный на коленчатом валу 106 двигателя 29, ведомый шкив 112, расположенный на ведомом валу 108 и вращающийся вместе с ним, и ремень 114 вариатора, расположенный вокруг обоих шкивов 110, 112, для передачи крутящего момента от ведущего шкива 110 к ведомому шкиву 112. Крышка 100 (показанная на фиг. 3), расположенная поверх вариатора 102, соединена как с двигателем 29, так и с трансмиссией 116.
[0055] Каждый из шкивов 110, 112 содержит выполненный с возможностью перемещения конусный диск, который может быть перемещен в осевом направлении относительно фиксированного конусного диска для изменения эффективного диаметра соответствующего шкива 110, 112. Конусные диски перемещаются в ответ на изменения частоты вращения двигателя и требуемого крутящего момента колес. Эффективные диаметры шкивов 110, 112 находятся в обратно пропорциональном отношении. Согласно показанному на чертеже варианту реализации вариатор 102 является простым механическим вариатором 102, в котором диаметр ведущего шкива 110 увеличивается с увеличением скорости вращения ведущего шкива 110 (т.е., с увеличением частоты вращения двигателя). Диаметр ведомого шкива 112, таким образом, уменьшается при увеличении крутящего момента, требуемого на ведомом валу 108 (соединенном с колесами 14). Ремень 114 временами может скользить относительно ведущего шкива 110, когда требуемый крутящий момент колес 14 увеличивается (например, из-за ускорения или тяжелой нагрузки), и зажимная сила конусных дисков ведущего шкива, действующая на ремень 114, является недостаточной. При скольжении ремня двигателем 29 управляют в интервенционном режиме для управления крутящим моментом двигателя, как описано ниже, для ограничения проскальзывания ремня. Также предполагается, что вариатор 102 может быть вариатором с принудительным усилением, который содержит гидравлическую, пневматическую или другую систему для управления эффективным диаметром шкивов 110 или 112.
[0056] Трансмиссия 116 расположена позади двигателя 29. Трансмиссия 116 передает крутящий момент от поперечно проходящего приводного вала 108 к продольно проходящим переднему и заднему карданным валам (не показаны). Трансмиссия 116 содержит различные наборы редукторов, сочетание которых выбирается в зависимости от положения селектора 40 передач.
[0057] Передний карданный вал проходит через двигатель 29 и соединен с вторичным передним карданным валом 122 посредством карданного шарнира 124. От карданного шарнира 124 вторичный передний карданный вал 122 проходит вперед и вправо относительно мотовездехода 10 к другому карданному шарниру 126. Карданный шарнир 126 соединяет вторичный передний карданный вал 122 с дифференциалом 128. Дифференциал 128 соединен посредством карданных шарниров 130 с левой и правой ведущими осям 132. Ведущие оси 132 соединены с передними колесами 14 посредством карданных шарниров 134.
[0058] Задний карданный вал соединен с вторичным задним карданным валом 136 посредством карданного шарнира 138. От карданного шарнира 138 вторичный задний карданный вал 136 проходит назад и влево относительно транспортного средства 10 к другому карданному шарниру 140. Карданный шарнир 140 соединяет вторичный задний карданный вал 136 с дифференциалом 142. Дифференциал 142 соединен посредством карданных шарниров 144 с левой и правой ведущими осями 146. Ведущие оси 146 соединены с задними колесами 14 посредством карданных шарниров 148.
[0059] Каждая из передних левой и правой подвесок 13А содержит нижний и верхний А-образные рычаги 150, 152. Нижний А-образный рычаг 150 шарнирно соединен одним концом с передней частью рамы 12 и другим концом шарнирно соединен с нижней частью поворотного шкворня (не показан). Переднее левое колесо 14 с возможностью вращения соединено с поворотным шкворнем. Верхний А-образный рычаг 152 расположен над нижним А-образным рычагом 150. Верхний А-образный рычаг 152 одним концом шарнирно соединен с передней частью рамы 12 и другим концом шарнирно соединен с верхней частью поворотного шкворня. Амортизатор 154 соединен между наружным концом верхнего А-образного рычага 152 и передней частью рамы 12. Стабилизатор 156 подвески, расположенный позади передних подвесок 13А, соединен с обоими верхними А-образными рычагами 152 для повышения боковой жесткости подвесок 13А.
[0060] Каждая из задних левой и правой подвесок 13В содержит поворотный кронштейн 158 и амортизатор 160. Трубчатый передний конец поворотного кронштейна 158 надет на вал 162, образующий ось 164 качания поворотного кронштейна 158. От своего переднего конца поворотный кронштейн 158 проходит к наружной стороне и назад к заднему левому колесу 14. Поворотный кронштейн 158 имеет пластину 166, выполненную за одно целое с ним, которая проходит назад от центральной части поворотного кронштейна 158. Нижний конец амортизатора 160 соединен с пластиной 166. От пластины 166 амортизатор 160 проходит вверх и вперед для соединения с рамой 12. Тяга 168 жестко соединяет поворотный кронштейн 158 с левым концом торсиона 170. Торсион 170 является коаксиальным с валом 162. Поскольку другой конец торсиона 170 жестко соединен с тягой 168 задней правой подвески 13В, торсион 170 увеличивает боковую жесткость подвесок 13В.
[0061] Ниже со ссылкой на фиг. 4 будут описаны элементы управляющей системы мотовездехода 10.
[0062] Мотовездеход 10 имеет датчик 200 скорости транспортного средства, соединенный с управляющим блоком 88. Датчик 200 скорости является датчиком Холла и связан с зубчатым колесом на карданном валу, таком как карданные валы 108, 122 или 136, для распознавания скорости вращения карданного вала 108. Датчик 200 скорости передает сигнал скорости, сформированный на основе скорости вращения карданного вала, к управляющему блоку 88. При известном диаметре колес 14 управляющий блок может определить скорость транспортного средства 10 и скорость вращения ведомого шкива 112. Предполагается, что датчик 200 скорости транспортного средства может распознавать скорость любого вала, приведенного во вращение ведомым шкивом 112 (т.е., любого вала, соединенного между ведомым шкивом 112 и одним из колес 14), включая валы внутри трансмиссии 116, для определения скорости транспортного средства 10.
[0063] Мотовездеход 10 также имеет датчик 202 оборотов двигателя, соединенный с управляющим блоком 88. Датчик 202 оборотов двигателя является датчиком Холла и связан с зубчатым колесом, расположенным на коленчатом валу 106 двигателя 29. Предполагается, что датчик 202 оборотов, двигателя может быть связан с любым вращающимся валом двигателя 29 или соединен между двигателем 29 и ведущим шкивом 110, таким как распредвал (не показан). Датчик 202 оборотов двигателя передает сигнал частоты вращения двигателя, сформированный на основе скорости вращения, управляющему блоку 88. Управляющий блок 88 определяет скорость вращения ведущего шкива 110 и крутящий момент двигателя на основе сигнала датчика оборотов двигателя.
[0064] Как указано выше, управляющий блок 88 принимает сигнал положения педали дроссельной заслонки от датчика 86 положения педали дроссельной заслонки и сигнал положения дроссельной заслонки от датчика 90 положения дроссельной заслонки.
[0065] Управляющий блок 88 соединен с селектором 38 передачи для приема сигнала, указывающим передачу, выбранную в данный момент.
[0066] Переключатель 44 блокирования вмешательства также соединен с управляющим блоком 88 и при своей активации передает сигнал управляющему блоку 88, указывающий предпочтение водителем работы двигателя 29 в режиме блокирования вмешательства, как описано ниже.
[0067] По меньшей мере частично на основе сигналов, принятых от переключателей/датчиков 38, 44, 86, 90, 200 и 202, управляющий блок 88 передает сигналы двигателю 29 для работы двигателя 29 в режиме вмешательства. Управляющий блок 88 соединен со свечой 204 зажигания для управления зажиганием топливовоздушной смеси в камере сгорания двигателя 29. Управляющий блок 88 соединен с топливным инжектором 206 для управления впрыском топлива в двигатель 29. Управляющий блок 88 также соединен с электродвигателем 80 для управления положением дроссельной заслонки 78, расположенной внутри корпуса 68 дроссельной заслонки, как указано выше.
[0068] Управляющий блок 88 также соединен с приборными индикаторами 42 для управления отображением на них информации. Управляющий блок 88 передает сигналы приборным индикаторам 42 для отображения информации относительно скорости вращения двигателя и транспортного средства, а также переключения передач. Отображенная информация также включает инструкции, например, предлагающие водителю освободить педаль дроссельной заслонки или включить пониженную передачу в режиме вмешательства.
[0069] Предполагается, что управляющий блок 88 может быть разделен на различные блоки, каждый из которых выполняет одну или большее количество функций, описанных выше и ниже в настоящем описании.
[0070] Мотовездеход 10 имеет другие особенности и компоненты, такие как фары и рукоятки. Поскольку полагается, что эти особенности и компоненты могут быть бы легко распознаны специалистом, дополнительное объяснение и описание этих компонентов опущено.
[0071] Как описано выше, в некоторых ситуациях ремень 114 может скользить относительно ведущего шкива 110. Энергия, накопленная ремнем 114 (генерируемое тепло) во время скольжения даже может повредить ремень 114.
[0072] Ниже со ссылкой на фиг. 5 описан способ 300 управления работой двигателя 29 для ограничения скольжения ремня 114 и, таким образом, предотвращения повреждения ремня 114 и визуального и физического уведомления водителя о вмешательстве.
[0073] Способ 300 начинается на этапе 310, когда двигатель 29 работает. На этапе 310 управляющий блок 88 сбрасывает до 0 накопленную энергию Е, время к накопленной энергии и время tTP положения педали дроссельной заслонки до 0.
[0074] На этапе 320 управляющий блок 88 сравнивает скорость V транспортного средства с пороговой скоростью Vth транспортного средства. Скоростью Vth является заданной, и на основе скорости Vth, выше которой ремень 114 вращается достаточно для рассеяния накопленной энергии Е достаточно большой площадью поверхности таким образом, что ремень 114 не будет поврежден ни в каком конкретном месте. Если V>Vth, способ 300 возвращается к этапу 310. Если V<Vth, способ 300 переходит к этапу 330.
[0075] На этапе 330 управляющий блок 88 определяет, что переключение передачи затребовано водителем мотовездехода 10 на основе положения G селектора 38 передач. Если селектор 38 передач установлен в положение Н или положение повышенной передачи, т.е., G=H, способ переходит к этапу 350. Если селектор 38 передач не установлен в положение повышенной передачи, т.е., G≠H, способ возвращается к этапу 310.
[0076] На этапе 340 управляющий блок 88 сравнивает положение TP педали дроссельной заслонки с пороговым положением TPth педали дроссельной заслонки. Если положение TP педали дроссельной заслонки соответствует или выше, чем пороговое положение TPth педали дроссельной заслонки (т.е., TP≥TPth), управляющий блок 88 переходит к этапу 340. Если положение TP педали дроссельной заслонки ниже, чем пороговое положение TPth дроссельной заслонки (т.е., TP<TPth), управляющий блок 88 возвращается к этапу 310.
[0077] Также предполагается, что скорость Wb вращательного скольжения ремня 114 может быть отслежена и сравнена с пороговой скоростью скольжения для определения скольжения ремня 114. Скорость Wb вращательного скольжения ремня равна разности скоростей вращения ведомого шкива 112 и ремня 114, при условии, что диаметр ведомого шкива 112 близок к его максимальному диаметру. Управляющий блок 88 определяет скорость Wb скольжения ремня 114 из разности между скоростью ведущего шкива (определенной из сигнала датчика оборотов двигателя) и скоростью ведомого шкива (определенной из сигнала датчика скорости транспортного средства), в предположении, что ремень 114 вращается с ведомым шкивом 112.
[0078] На этапе 350 способа 300 определяют полную энергию Е, накопленную скользящим ремнем 114 в течение полного периода времени от t=0 до t=k его перемещения на ведущем шкиве 110. Энергия, накопленная ремнем 114 в течение периода времени, равного временному интервалу ts осуществления выборки, определена как Wb*Te*ts, где Wb - скорость вращательного скольжения ремня 114, и Те - крутящий момент двигателя в течение временного интервала ts. Если скорость Wb проскальзывания ремня и крутящий момент Те двигателя изменяются в течение интервала ts выборки, для определения накопленной энергии Е используют их соответствующие средние значения в течение этого интервала. Полная энергия Е, накопленная ремнем 114 в течение интервала между t=0 и t=k может быть получена суммированием энергии Е, накопленной в течение каждого временного интервала ts в течение периода времени от t=0 до t=k. Таким образом,
[0079] E(k)=Е(k-1)+Wb*Te*ts,
[0080] где Е(k) - полная энергия, накопленная в течение периода времени от t=0 до t=k, и Е(k-1) - полная энергия, ранее накопленная в течение периода времени от t=0 до времени t=k-1. Средний крутящий момент Те двигателя определяется из сигнала датчика оборотов двигателя, принятого от датчика 202 оборотов двигателя и датчика 86 положения педали дроссельной заслонки.
[0081] На этапе 360 полную накопленную энергию Е(k) сравнивают с пороговой энергией Eth. Пороговая энергия Eth задана на основе нескольких факторов, таких как помимо прочего материал и размеры используемого ремня 114. Если энергия Е(k), накопленная ремнем 114, больше, чем пороговая энергия Eth, существует повышенный риск повреждения скользящего ремня 114 из-за образования залысин. Таким образом, желательно ограничить или остановить скольжение ремня, когда накопленная энергия достигает порогового значения. Таким образом, на этапе 360, если накопленная энергия E(k)≥Eth, способ 300 переходит к этапу 365. Если накопленная энергия E(k)<Eth, способ 300 возвращается к этапу 320.
[0082] На этапе 365 управляющий блок 88 определяет, активирован ли переключатель 44 блокирования вмешательства водителем мотовездехода 10. Если переключатель 44 активирован, способ 300 возвращается к этапу 310. Если переключатель блокирования вмешательства не активирован, способ переходит к этапу 370 для начала работы в режиме вмешательства.
[0083] На этапе 370 управляющий блок 88 инициирует работу двигателя 29 в режиме вмешательства, который будет описанный ниже более подробно. Во время работы в режиме вмешательства управляющий блок 88 передает сигналы по меньшей мере одной из свечей 204 зажигания, электродвигателю 80 и топливному инжектору 206 для управления их работой, как описано ниже.
[0084] Управляющий блок 88 продолжает работу двигателя 29 в режиме вмешательства, пока скорость V транспортного средства остается ниже скорости Vith порога вмешательства транспортного средства, и положение TP педали дроссельной заслонки остается выше порога TPith вмешательства педали дроссельной заслонки. В показанном на чертеже варианте реализации способа 300 Vith и TPith являются теми же самыми, что и порог Vth скорости транспортного средства на этапе 320 и порог TPth педали дросселя на этапе 340, т.е., Vth=Vith и TPth=TPith, но также предполагается, что пороги Vith и TPith для работы в режиме вмешательства могут быть различными, т.е., TPth≠TPith и Vth≠Vith. Согласно показанному на чертеже варианту реализации TPith и TPth составляют 5% от максимального положения педали дроссельной заслонки, однако, предполагается, что эти соотношения могут быть установлены при различном положении педали дроссельной заслонки на основе факторов, таких как надежность ремня 114 при нагреве, максимальный крутящий момент Те, который может выработан двигателем 29, вес мотовездехода 10, и т.п.
[0085] После инициирования на этапе 370 работы в режиме вмешательства способ 300 переходит к этапу 380, на котором скорость V транспортного средства сравнивают с пороговой скоростью Vth транспортного средства. Если на этапе 380 скорость V транспортного средства определена как превышающая пороговую скорость Vth, способ переходит к этапу 400, на котором работа двигателя 29 в режиме вмешательства завершается. Увеличение скорости V транспортного средства указывает, что мотовездеход 10 перемещается, и подразумевается, что ремень 114 больше не скользит (или по меньшей мере скольжение ремня 114 имеет по меньшей мере пониженный уровень, который не вызывает нежелательного повреждения ремня 114), и работа в режиме вмешательства для препятствования скольжению ремня больше не является необходимой. Если скорость V транспортного средства остается меньше, чем пороговая скорость Vth, способ переходит к этапу 390.
[0086] На этапах 390, 392, 395, 398 управляющий блок 88 определяет, уменьшилось ли положение TP педали дроссельной заслонки до значения ниже TPth в течение по меньшей мере заданного количества времени tTPth.
[0087] На этапе 390, управляющий блок 88 сравнивает положение TP педали дроссельной заслонки с пороговым положением TPth педали дроссельной заслонки. Если TP больше, чем TPth, что указывает на то, что водитель продолжает требовать повышенной мощности от двигателя 29, способ переходит к этапу 392. На этапе 392 таймер tTP педали дроссельной заслонки в режиме вмешательства сбрасывается до 0 перед переходом способа 300 к этапу 370 для продолжения работы двигателя 29 в режиме вмешательства. Если на этапе 390 определено, что положение TP педали дроссельной заслонки ниже, чем порог TPith вмешательства педали дроссельной заслонки, способ переходит к этапу 395, на котором таймер tTP педали дроссельной заслонки в режиме вмешательства обновляется путем добавления приращения положения педали дроссельной заслонки в течение интервала tsTP выборки.
[0088] На этапе 398 обновленное время tTP педали дроссельной заслонки в режиме вмешательства сравнивают с пороговым временем tTPth. Если определено, что tTP больше, чем tTPth, (т.е., положение TP педали дроссельной заслонки осталось ниже порогового положения TPth педали дроссельной заслонки в течение по меньшей мере порогового промежутка времени tTPth), способ 300 переходит к этапу 400 для прекращения работы в режиме вмешательства. Если tTP меньше чем tTPth, (т.е., положение педали дроссельной заслонки ниже, чем порог положения педали дроссельной заслонки, TP<TPth, но по меньшей мере не в течение промежутка времени tTPth), способ переходит к этапу 370 для продолжения работы в режиме вмешательства.
[0089] На этапе 400 способ 300 работы двигателя в режиме вмешательства прекращается. Способ возвращается к этапу 310, на котором управляющий блок 88 сбрасывает счетчик накопленной энергии Е(k) до 0.
[0090] Предполагается, что работа в режиме вмешательства может быть остановлена при TP>TPth. В этом случае, этапы 392, 395 и 398 могут быть опущены, и способ 300 может перейти непосредственно к этапу 400, если на этапе 390 определено, что TP>TPth.
[0091] В способе 300 отсутствует дополнительный этап для прекращения работы в режиме вмешательства, если селектор передач 38 переключен на пониженную передачу, поскольку при этом может потребоваться, чтобы водитель освободил педаль 40 дроссельной заслонки, в результате чего также уменьшится положение педали дроссельной заслонки относительно порогового положения педали дроссельной заслонки (т.е., TP<TPth).
[0092] Ниже описана работа в режиме вмешательства со ссылкой на фиг. 6. Как указано выше, работа в режиме вмешательства начинается на этапе 370 и прекращается на этапе 400.
[0093] Во время работы двигателя 29 в режиме вмешательства крутящим моментом Те(k) двигателя, вырабатываемым двигателем 29, управляют для ограничения или прекращения скольжение ремня 114. Крутящий момент Те двигателя циклически изменяют таким образом, что мотовездеход 10 колеблется назад и вперед в результате колебаний двигателя. Крутящим моментом Те двигателя также управляют для ограничения его величины и/или скорости его увеличения.
[0094] На первой стадии 410 режима вмешательства, крутящий момент Те двигателя циклически колеблется, начиная с точки 416, в которой накопленная энергия Е выше пороговой энергии Eth. Крутящим моментом Те двигателя управляют для достижения низкоамплитудных высокочастотных колебаний вокруг среднего значения крутящего момента Teavg двигателя (как показано пунктирными линиями на фиг. 6). На этапе 410 работы в режиме вмешательства средний крутящий момент Teavg двигателя продолжает следовать за крутящим моментом 414, который востребован водителем посредством педали 40 дроссельной заслонки.
[0095] Когда начинается работа в режиме вмешательства, ведомый шкив является почти неподвижным, поскольку ремень 114 скользит по ведущему шкиву 110 и, таким образом, не передает достаточный крутящий момент ведомому шкиву 112. Во время колебаний вокруг среднего значения момента Teavg предпочтительная реакция мотовездехода 10 состоит в качании вперед под действием увеличенного крутящего момента Те с последующим качанием назад под действием уменьшенного крутящего момента Те для создания качающегося перемещения мотовездехода 10, которое является заметным для водителя. Таким образом, в то время как крутящий момент Те двигателя циклически колеблется вокруг среднего крутящего момента Teavg, мотовездеход 10 перемещается периодическими рывками под действием колеблющегося крутящего момента Те двигателя. Соответственно, в то время как крутящий момент Те циклически колеблется вокруг среднего крутящего момента Teavg, ведомый шкив 112 и ремень 114 периодически вращаются в переднем и заднем направлениях в соответствии с колеблющимся крутящим моментом Те, в результате чего увеличивается площадь поверхности рассеяния энергии Е(k).
[0096] Амплитуду и частоту колебаний крутящего момента Те двигателя устанавливают на основе веса мотовездехода 10 и рабочих характеристик двигателя 29 для получения некоторого количества переднего и заднего перемещения мотовездехода 10 с одновременным достижением некоторого количества вращения ведомого шкива 112 в зависимости от трансмиссии 116. Согласно показанному на чертеже варианту реализации амплитуда и частота колебаний крутящего момента Те установлены таким образом, чтобы ведомый шкив 112 вращался в пределах одного оборота вперед и назад в течение каждого колебания крутящего момента Те. Такое вращение ведомого шкива 112 вызывает перемещение мотовездехода 10 назад и вперед примерно до 6 дюймов в каждом направлении, что, таким образом, является заметным для водителя мотовездехода 10.
[0097] Качающееся перемещение мотовездехода 10 таким образом служит для предупреждения водителя о том, что ремень 114 скользит, и двигателем 29 управляют в режиме вмешательства. Циклическое действие крутящего момента Те двигателя также предотвращает образование залысин и повреждение ремня 114 благодаря рассеиванию накопленной энергии Е увеличенной поверхностью ремня 114 при качающемся перемещении мотовездехода 10. Когда мотовездеход 10 перемещается рывками назад и вперед, колеса 14 вращаются вперед и назад. Ведомый шкив 112 и ремень 114 также вращаются вперед и назад вместе с колесами 14. Когда ремень 114 вращается вперед и назад, часть ремня 114, находящаяся в контакте с ведущим шкивом 110, меняется, в результате чего предотвращено накапливание всей энергии Е том же самом месте на ремне 114, благодаря чему уменьшена вероятность образования залысин на ремне.
[0098] Если мотовездеход 10 не начинает перемещаться вперед (т.е. V<Vth) после начала циклического действия крутящего момента Те двигателя, и если водитель мотовездехода 10 продолжает увеличивать требование 414 крутящего момента путем увеличения положения TP педали дроссельной заслонки, управляющий блок 88 начинает вторую стадию 412 вмешательства для предотвращения повреждения ремня 110 в результате образования залысин на ремне. Вторая стадия 412 вмешательства начинается в момент 418, когда положение TP педали дроссельной заслонки больше в момент 418 прошлого максимального положения TPsmax дроссельной заслонки при скольжении, т.е., когда TP>TPsmax.
[0099] На второй стадии 412 вмешательства крутящий момент двигателя Те продолжается циклически изменяться, в то время как средний крутящий момент Teavg двигателя ограничивают. Скорость увеличения среднего крутящего момента Teavg двигателя ограничивают для того, чтобы она была ниже скорости увеличения крутящего момента, соответствующего требуемому положению 414 дроссельной заслонки (т.е., положению TP педали дроссельной заслонки). Согласно показанному на чертеже варианту реализации мгновенный крутящий момент Те двигателя также ограничен значением Telim, которое меньше, чем максимальный возможный крутящий момент Те, который может выработать двигатель 20.
[00100] Средний крутящий момент Teavg двигателя, который меньше, чем максимальный ограниченный крутящий момент Telim, равен моменту TPsmax. Предполагается, что крутящим моментом Те можно управлять таким образом, что максимальный ограниченный крутящий момент Telim соответствует максимальному положению TPsmax дроссельной заслонки при скольжении. Согласно показанному на чертеже варианту реализации TPsmax составляет 50% от максимального положения TP педали дроссельной заслонки. Однако предполагается, что положение TPsmax может быть установлено в различном положении TP педали дроссельной заслонки на основе факторов, таких как надежность ремня 114 при нагреве, максимальный крутящий момент Те, который может быть выработан двигателем 29, вес мотовездехода 10, и т.п.
[00101] Предполагается, что крутящим моментом Те двигателя управляют для ограничения только скорости увеличения среднего крутящего момента 417, но не мгновенного крутящего момента Те. Также предполагается, что на второй стадии вмешательстве 412 крутящий момент Те не изменяется циклически.
[00102] Крутящим моментом Те двигателя управляют путем регулировки по меньшей мере одного из следующих параметров: угла опережения зажигания, впрыска топлива и подачи воздуха в двигатель 29. Как указано выше, управляющий блок 88 управляет углом опережения зажигания путем передачи сигнала свечам 204 зажигания. Управляющий блок 88 управляет впуском топлива путем передачи другого сигнала топливным инжекторам 206 для управления впрыском топлива. Также как указано выше, управляющий блок 88 управляет подачей воздуха в двигатель 29 путем передачи сигнала электродвигателю 80 для регулирования отверстия дроссельной пластины 78 в корпусе 68 дроссельной заслонки.
[00103] Известно, что в некоторых конструкциях крутящий момент Те двигателя быстрее отвечает на регулировку угла опережения зажигания, чем на изменения впрыска топлива или подачи воздуха. Таким образом в показанном на чертеже варианте реализации циклическое изменение крутящего момента Те достигается циклическим изменением угла опережения зажигания путем управления свечами 204 зажигания.
[00104] В показанном на чертеже варианте реализации крутящий момент Те двигателя ограничивается путем регулировки положения дроссельной пластины 78 в корпусе 68 дроссельной заслонки, которая пропускает воздух в двигатель 29. Предполагается, что управляющий блок 88 может использовать любые из вышеуказанных регулировок индивидуально или одновременно для циклического изменения или ограничения крутящего момента Те в течение работы двигателя 29 в режиме вмешательства. Также предполагается, что другие подходящие параметры также могут быть использованы для циклического изменения или ограничения крутящего момента Те двигателя.
[00105] Кроме того, в течение работы двигателя 29 в режиме вмешательства управляющий блок 88 передает сигнал приборным индикаторам 42 для отображения соответствующего предупреждения для водителя мотовездехода 10. Предупреждение может уведомлять водителя о том, что ремень 114 проскальзывает, или имеется опасность его повреждения. Предупреждение может быть осуществлено в форме предупредительного сообщения, значка или светового индикатора. Предупреждение дополнительно может включать звуковой сигнал или сигнал тревоги. Предполагается, что приборные индикаторы 42 также могут отображать четкие инструкции для водителя мотовездехода 10 относительно рекомендуемых действий, направленных на уменьшение или прекращение скольжения ремня 114, например, инструкции водителю могут содержать рекомендацию включить пониженную передачу.
[00106] Водитель может остановить работу двигателя в режиме вмешательства несколькими различными способами. Водитель может освободить педаль 40 дроссельной заслонки на интервал времени больше, чем заданное время tTPth, например, 5 секунд. Водитель может переключить мотовездеход 10 на пониженную передачу с использованием рукоятки 38 переключателя передач. Водитель также может быть блокировать вмешательство путем активации переключателя 44 блокирования вмешательства, которым оборудован мотовездеход 10. При активации переключателя 44 управление двигателем 29 в режиме вмешательства становится невозможным, но как только переключатель 44 освобожден, и если удовлетворены критерии включения режима вмешательства (V<Vth, TP>TPth, G=H, E>Eth), режим вмешательства возобновляется.
[00107] Изменения и усовершенствования вышеописанных вариантов реализации настоящего изобретения могут быть очевидными для специалистов. Приведенное выше описание предназначено служить в качестве примера и не является ограничением настоящего изобретения. Таким образом, объем защиты настоящего изобретения определен только пунктами приложенной формулы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТОРМОЖЕНИЯ ДВИГАТЕЛЕМ ТРАНСПОРТНОГО СРЕДСТВА С БЕССТУПЕНЧАТОЙ ТРАНСМИССИЕЙ | 2016 |
|
RU2708808C2 |
| СПОСОБ УПРАВЛЕНИЯ БЕССТУПЕНЧАТОЙ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2680209C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА И ТРАНСПОРТНОЕ СРЕДСТВО | 2015 |
|
RU2782720C1 |
| МНОГОМЕСТНЫЙ РЕКРЕАЦИОННЫЙ МОТОВЕЗДЕХОД | 2013 |
|
RU2619743C2 |
| СПОСОБ УПРАВЛЕНИЯ МОТОРОМ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2750961C2 |
| СИСТЕМА И СПОСОБ ПРИМЕНЕНИЯ АКТИВНОГО МЕХАНИЗМА НАТЯЖЕНИЯ РЕМНЯ ВСТРОЕННОГО СТАРТЕРА-ГЕНЕРАТОРА С РЕМЕННОЙ ПЕРЕДАЧЕЙ | 2018 |
|
RU2688613C1 |
| СПОСОБ (ВАРИАНТЫ ) ЭКСПЛУАТАЦИИ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2660235C2 |
| КЛИНОЦЕПНОЙ ВАРИАТОР | 2003 |
|
RU2321786C2 |
| СИСТЕМА КОНТРОЛЯ ТЯГИ | 2017 |
|
RU2688081C1 |
| СНЕГОХОД | 2013 |
|
RU2719265C2 |



Изобретение относится к бесступенчатым трансмиссиям. В способе ограничения проскальзывания ремня в вариаторе транспортного средства определяют скорость скольжения ремня вариатора, определяют накопленную энергию на основании скорости скольжения ремня и крутящего момента, вырабатываемого двигателем, и управляют крутящим моментом двигателя в режиме вмешательства, если накопленная энергия больше, чем пороговая энергия. Управление крутящим моментом двигателя в режиме вмешательства включает управление циклического действия крутящего момента двигателя и ограничения крутящего момента двигателя. Исключается повреждение скользящего ремня. 3 н. и 18 з.п. ф-лы, 6 ил.
1. Способ ограничения проскальзывания ремня в вариаторе (CVT) транспортного средства, функционально соединенном с двигателем, включающий этапы, согласно которым:
определяют скорость скольжения ремня вариатора,
определяют накопленную энергию на основании скорости скольжения ремня и крутящего момента, вырабатываемого двигателем, и
управляют крутящим моментом двигателя в режиме вмешательства, если накопленная энергия больше, чем пороговая энергия,
причем управление крутящим моментом двигателя в режиме вмешательства включает управление по меньшей мере одним из:
циклического действия крутящего момента двигателя и
ограничения крутящего момента двигателя.
2. Способ по п. 1, дополнительно включающий этапы, согласно которым:
определяют, скользит ли ремень вариатора относительно ведущего шкива вариатора, перед определением накопленной энергии.
3. Способ по п. 2, согласно которому ремень вариатора определен как проскальзывающий, если:
скорость транспортного средства меньше, чем пороговая скорость транспортного средства,
трансмиссия транспортного средства находится в положении повышенной передачи, и
исполнительно-приводной механизм дроссельной заслонки транспортного средства установлен в положении исполнительно-приводного механизма дроссельной заслонки, которое больше, чем пороговое положение исполнительно-приводного механизма дроссельной заслонки.
4. Способ по п. 1, согласно которому накопленную энергию сбрасывают в ноль, если:
скорость транспортного средства больше, чем пороговая скорость транспортного средства.
5. Способ по п. 1, согласно которому накопленную энергию сбрасывают в ноль, если:
трансмиссия транспортного средства находится в положении пониженной передачи.
6. Способ по п. 1, согласно которому накопленную энергию сбрасывают в ноль, если:
исполнительно-приводной механизм дроссельной заслонки транспортного средства установлен в положение исполнительно-приводного механизма дроссельной заслонки, которое ниже, чем пороговое положение исполнительно-приводного механизма дроссельной заслонки.
7. Способ по п. 1, согласно которому управление крутящим моментом двигателя в указанном режиме вмешательства включает управление крутящим моментом двигателя на основании положения исполнительно-приводного механизма дроссельной заслонки, установленного водителем транспортного средства.
8. Способ по п. 7, согласно которому управление крутящим моментом двигателя в указанном режиме вмешательства включает этапы, на которых:
вызывают циклическое изменение крутящего момента двигателя, если положение исполнительно-приводного механизма дроссельной заслонки, установленное водителем, больше, чем первое пороговое положение исполнительно-приводного механизма дроссельной заслонки, причем циклическое изменение крутящего момента двигателя вызывают для колебания крутящего момента относительно среднего крутящего момента двигателя, выбранного на основании положения исполнительно-приводного механизма дроссельной заслонки, и
ограничивают крутящий момент двигателя, если положение исполнительно-приводного механизма дроссельной заслонки, установленное водителем, больше, чем второе пороговое положение исполнительно-приводного механизма дроссельной заслонки, причем второе пороговое положение исполнительно-приводного механизма дроссельной заслонки больше, чем первое пороговое положение исполнительно-приводного механизма дроссельной заслонки.
9. Способ по п. 8 согласно которому:
задают значение первого порогового положения исполнительно-приводного механизма дроссельной заслонки, составляющее 5% от максимального положения исполнительно-приводного механизма дроссельной заслонки.
10. Способ по п. 8 согласно которому:
задают значение второго порогового положения исполнительно-приводного механизма дроссельной заслонки, составляющее 50% от максимального положения исполнительно-приводного механизма дроссельной заслонки.
11. Способ по п. 1, согласно которому управление крутящим моментом двигателя в указанном режиме вмешательства включает:
циклическое изменение крутящего момента двигателя для обеспечения его колебания вокруг требуемого крутящего момента, причем амплитуда колебаний выбрана с возможностью вырабатывания качающегося перемещения транспортного средства.
12. Способ по п. 1, согласно которому скорость увеличения среднего крутящего момента двигателя уменьшается, если положение исполнительно-приводного механизма дроссельной заслонки больше, чем первое пороговое положение исполнительно-приводного механизма дроссельной заслонки.
13. Способ по п. 1, согласно которому ограничение крутящего момента двигателя включает по меньшей мере одно из:
ограничения подачи воздуха в двигатель; и
ограничения впрыска топлива в двигатель.
14. Способ по п. 1, согласно которому циклическое изменение крутящего момента двигателя включает циклическое изменение угла опережения зажигания двигателя.
15. Способ по п. 1, согласно которому управление крутящим моментом двигателя в указанном режиме вмешательства дополнительно включает показ водителю транспортного средства по меньшей мере одного из:
указания относительно скольжения ремня вариатора и рекомендации о переключении передачи.
16. Способ по п. 1, дополнительно включающий прекращение управления крутящим моментом двигателя в указанном режиме вмешательства, если:
скорость транспортного средства больше, чем пороговая скорость транспортного средства.
17. Способ по п. 1, дополнительно включающий прекращение управления крутящим моментом двигателя в указанном режиме вмешательства, если:
исполнительно-приводной механизм дроссельной заслонки установлен в положении ниже порогового положения исполнительно-приводного механизма дроссельной заслонки.
18. Способ по п. 1, дополнительно включающий прекращение управления крутящим моментом двигателя в указанном режиме вмешательства, если:
исполнительно-приводной механизм дроссельной заслонки установлен в положение ниже порогового положения исполнительно-приводного механизма дроссельной заслонки в период времени, по меньшей мере равный пороговому значению времени исполнительно-приводного механизма дроссельной заслонки.
19. Способ по п. 1, дополнительно включающий прекращение управления крутящим моментом двигателя в указанном режиме вмешательства, если:
активирован переключатель блокирования вмешательства.
20. Способ ограничения проскальзывания ремня в вариаторе (CVT) транспортного средства, функционально соединенном с двигателем, включающий этапы, согласно которым:
определяют скорость скольжения ремня вариатора,
определяют накопленную энергию на основании скорости скольжения ремня и крутящего момента, вырабатываемого двигателем, и
управляют крутящим моментом двигателя в указанном режиме вмешательства, если накопленная энергия больше, чем пороговая энергия,
причем управление крутящим моментом двигателя в режиме вмешательства включает:
циклическое изменение крутящего момента двигателя, если исполнительно-приводной механизм дроссельной заслонки установлен в положение, большее, чем первое пороговое положение исполнительно-приводного механизма дроссельной заслонки, при этом крутящий момент двигателя циклически изменяют для обеспечения колебания относительно среднего крутящего момента двигателя, причем средний крутящий момент двигателя выбран на основании положения исполнительно-приводного механизма дроссельной заслонки, и
ограничение крутящего момента двигателя, если исполнительно-приводной механизм дроссельной заслонки установлен в положение, которое больше, чем второе пороговое положение исполнительно-приводного механизма дроссельной заслонки, при этом второе пороговое положение исполнительно-приводного механизма дроссельной заслонки больше, чем первое пороговое положение исполнительно-приводного механизма дроссельной заслонки, и
прекращение управления крутящим моментом двигателя в режиме вмешательства, если удовлетворено любое из следующих условий:
скорость транспортного средства больше, чем пороговая скорость транспортного средства, и
исполнительно-приводной механизм дроссельной заслонки транспортного средства установлен в положение, которое ниже, чем первое пороговое положение исполнительно-приводного механизма дроссельной заслонки.
21. Транспортное средство, содержащее:
раму;
двигатель, удерживаемый рамой, содержащий:
дроссельную заслонку для управления подачей воздуха в двигатель, топливный инжектор для управления впрыском топлива в двигатель и свечу зажигания;
управляющий блок, соединенный с двигателем, для управления крутящим моментом, вырабатываемым двигателем;
исполнительно-приводной механизм дроссельной заслонки, соединенный с дроссельной заслонкой и выполненный с возможностью перемещения между множеством положений исполнительно-приводного механизма дроссельной заслонки, причем исполнительно-приводной механизм дроссельной заслонки соединен с управляющим блоком и передает управляющему блоку сигнал положения исполнительно-приводного механизма дроссельной заслонки, указывающий положение исполнительно-приводного механизма дроссельной заслонки;
ведущий вал, функционально соединенный с двигателем;
вариатор (CVT), содержащий:
ведущий шкив, соединенный с ведущим валом и вращающийся вместе с ним, ведомый шкив и
ремень, соединяющий ведущий шкив и ведомый шкив;
ведомый вал, соединенный с ведомым шкивом и вращающийся вместе с ним;
взаимодействующий с землей элемент, функционально соединенный с ведомым валом;
трансмиссию, функционально соединяющую вариатор (CVT) с взаимодействующим с землей элементом посредством множества передач;
селектор передач, соединенный с трансмиссией, для выбора одной из множества передач трансмиссии, причем селектор передач соединен с управляющим блоком и передает ему сигнал переключения передач, указывающий выбранную передачу;
датчик скорости транспортного средства, распознающий скорость вращения одного из: ведомого шкива, взаимодействующего с землей элемента и элемента, соединенного между ведомым шкивом и взаимодействующим с землей элементом, датчика скорости транспортного средства, соединенного с управляющим блоком для передачи ему сигнала скорости транспортного средства, указывающего скорость транспортного средства, причем управляющий блок определяет скорость транспортного средства и скорость ведомого шкива по меньшей мере частично на основе сигнала скорости транспортного средства; и
датчик оборотов двигателя, распознающий скорость вращения одного из: двигателя, ведущего шкива и элемента, соединенного между двигателем и ведущим шкивом, причем датчик оборотов двигателя соединен с управляющим блоком для передачи ему сигнала частоты вращения двигателя, указывающего частоту вращения двигателя, при этом управляющий блок определяет частоту вращения двигателя, крутящий момент двигателя и скорость ведущего шкива по меньшей мере частично на основании сигнала оборотов двигателя;
управляющий блок, управляющий крутящим моментом двигателя в указанном режиме вмешательства, когда ремень вариатора скользит относительно ведущего шкива,
управляющий блок, управляющий крутящим моментом двигателя в указанном режиме вмешательства на основании сигнала оборотов двигателя, сигнала скорости транспортного средства, сигнала положения исполнительно-приводного механизма дроссельной заслонки и сигнала переключения передач,
причем управляющий блок управляет крутящим моментом двигателя в указанном режиме вмешательства путем выполнения по меньшей мере одного из:
циклического изменения угла опережения зажигания;
ограничения подачи воздуха в двигатель; и
ограничения впрыска топлива в двигатель, и
управляющий блок управляет крутящим моментом двигателя в указанном режиме вмешательства путем передачи по меньшей мере одного из:.
сигнала угла опережения зажигания к свече зажигания;
управляющего сигнала дроссельной заслонки к дроссельной заслонке; и
сигнала регулирования впрыскивания топлива к топливному инжектору.
| US 2012252612 A1, 04.10.2012 | |||
| US 2004209732 A1, 21.10.2004 | |||
| US 6188944 B1, 13.02.2001 | |||
| US 2010168954 A1, 01.07.2010 | |||
| US 2004195034 A1, 07.10.2004. |

