Область техники, к которой относится изобретение
Изобретение относится к системе определения положения для зарядной станции для транспортного средства, по меньшей мере, частично с электроприводом. Изобретение относится также к транспортному средству и системе с транспортным средством и зарядной станцией.
Уровень техники
Транспортные средства, по меньшей мере, частично с электроприводом включают повторно заряжаемые аккумуляторы, называемые также вторичными аккумуляторами. Примером таких транспортных средств являются электрические маршрутные транспортные средства (электробусы). Электроприводы для маршрутных транспортных средств предпочтительны потому, что обычно время движения по маршруту ограничено и разделено периодами (перерывами), в которые можно зарядить аккумулятор. Кроме того, маршрутные транспортные средства движутся по установленным маршрутам, так что на маршруте могут быть устроены зарядные станции.
Для процесса зарядки зарядное устройство сопряжения зарядной станции должно быть приведено в контакт с контактным устройством сопряжения транспортного средства, при этом одно из обоих устройств сопряжения может содержать для контактирования пантограф. Чтобы контактирование действительно произошло, контактное устройство сопряжения должно быть позиционировано в заданной зоне относительно зарядной станции.
Контактное устройство сопряжения может быть расположено на крыше транспортного средства, а инверсный пантограф может образовать зарядное устройство сопряжения зарядной станции. Пантограф расположен на мачте зарядной станции. Это механическое устройство обеспечивает определенные допуски относительного положения транспортного средства в направлении проезжей части и поперек него. Примерные допуски в направлении проезжей части и поперек него составляют по 0,6 м. Для зарядки транспортное средство должно быть позиционировано в пределах этой зоны, с тем чтобы контактные элементы контактного устройства сопряжения могли войти в контакт с контактными элементами зарядного устройства сопряжения, в результате чего создано условие зарядки аккумулятора.
Для правильного положения в направлении проезжей части водитель транспортного средства может ориентироваться по меткам на проезжей части. Однако на практике этот способ оказался чреватым ошибками.
В WO 2014183961 предложен другой способ позиционирования. При этом итеративно и на основе ультразвука измеряются расстояния между транспортным средством и зарядной станцией, в то время как транспортное средство движется по заданному отрезку пути.
В DE 102011109834 А1 описана зарядная станция для транспортного средства с системой оптического определения положения транспортного средства с помощью его маркировки.
В US 2016/039541 А1 раскрыты зарядная станция для дрона и дрон, причем зарядная станция содержит систему оптического определения положения дрона, содержащего, в свою очередь, светодиоды.
Раскрытие изобретения
Задача изобретения заключается в повышении точности и надежности определения положения при подъезде к зарядным станциям.
Согласно изобретению, предложена система определения положения по п. 1 формулы изобретения.
Система определения положения предназначена для зарядной станции. Зарядная станция предназначена для транспортного средства, по меньшей мере, частично с электроприводом. Система служит для определения положения контактного устройства сопряжения транспортного средства по отношению к зарядному устройству сопряжения зарядной станции. При этом система определения положения оптически определяет положение, по меньшей мере, в двух измерениях.
За счет, по меньшей мере, двухмерного определения положения транспортное средство больше не привязано к заданному отрезку пути. Это повышает точность и надежность определения положения. Информации о соблюдении заданного отрезка пути не требуется.
В одном предпочтительном варианте система определения положения выполнена с возможностью определения положения с использованием геометрических признаков контактного устройства сопряжения.
Важным для позиционирования является лишь положение контактного устройства сопряжения относительно зарядного устройства сопряжения. За счет своих геометрических признаков контактное устройство сопряжения образует оптически регистрируемую, естественную позиционную метку.
Система выполнена с возможностью определения положения с использованием, по меньшей мере, одной, при необходимости, дополнительной позиционной метки. Позиционная метка выполнена с возможностью отражения и/или излучения света в заданном диапазоне длин волн.
Например, позиционная метка может содержать один или несколько светодиодов. В качестве альтернативы или дополнительно позиционная метка может содержать геометрические фигуры или коды.
Это обеспечивает, в частности, специально выполненную позиционную метку, которая распознается особенно хорошо и/или легко или надежно. Дополнительно или в качестве альтернативы в позиционной метке может быть закодирована информация о данном транспортном средстве, например о его высоте, типе и/или идентификационном номере.
Система определения положения может содержать, в частности, камеру и блок обработки. Блок обработки может быть выполнен с возможностью определения положения с использованием изображений камеры.
Основанное на использовании камеры определение положения особенно гибкое. Другим преимуществом основанного на использовании камеры определения положения является возможность определения расстояния от контактного устройства сопряжения до зарядного устройства сопряжения с использованием размера позиционной метки на изображении камеры.
В другом варианте может использоваться дополнительный датчик расстояния для определения расстояния от пантографа до контактного устройства сопряжения.
Камера может быть, в частности, инфракрасной камерой. За счет этого обеспечивается независимое от дневного света распознавание позиционной метки. Дополнительно камера может содержать блок инфракрасной подсветки.
Предложенная зарядная станция по п. 7 формулы содержит предложенную систему определения положения и блок инфракрасной подсветки. Блок инфракрасной подсветки служит для подсветки определенной зоны инфракрасным светом. Зона включает в себя участок, на котором должно находиться контактное устройство сопряжения, с тем чтобы оно могло контактировать посредством зарядного устройства сопряжения.
В одном предпочтительном варианте зарядная станция может быть выполнена с возможностью инициирования процесса зарядки только тогда, когда определение положения покажет, что контактное устройство сопряжения находится на упомянутом участке.
Предложенное транспортное средство по п. 9 формулы может приводиться в движение, по меньшей мере, частично электрически и содержит накопитель электрической энергии и контактное устройство сопряжения. Контактное устройство сопряжения может контактировать с зарядным устройством сопряжения зарядной станции так, что накопитель заряжается. Контактное устройство сопряжения содержит, по меньшей мере, одну позиционную метку.
Транспортное средство может содержать нагревательный элемент для обогрева позиционной метки. Благодаря этому обеспечивается распознаваемость позиционной метки во время снегопада и/или при обледенении.
Согласно изобретению, представлена также система с транспортным средством и зарядной станцией.
Транспортное средство и зарядная станция могут содержать по одному блоку для передачи данных. Зарядная станция может быть выполнена с возможностью передачи определенного положения транспортному средству.
Зарядная станция и/или транспортное средство могут содержать телеметрический блок для телеметрирования определенного положения. Транспортное средство может содержать дисплей и может быть выполнено с возможностью отображения на дисплее телеметрированного положения транспортного средства.
В системе от транспортного средства на зарядную станцию может далее передаваться информация через светодиоды, геометрические фигуры и/или коды.
При этом переданная через светодиоды информация может использоваться, например, для однозначной взаимосвязи между транспортным средством и зарядной станцией.
Краткое описание чертежей
Описанные выше свойства, признаки и преимущества изобретения, а также то, как они достигаются, становятся более ясными и однозначно понятными в связи с нижеследующим описанием примера его осуществления со ссылкой на чертежи, на которых изображают:
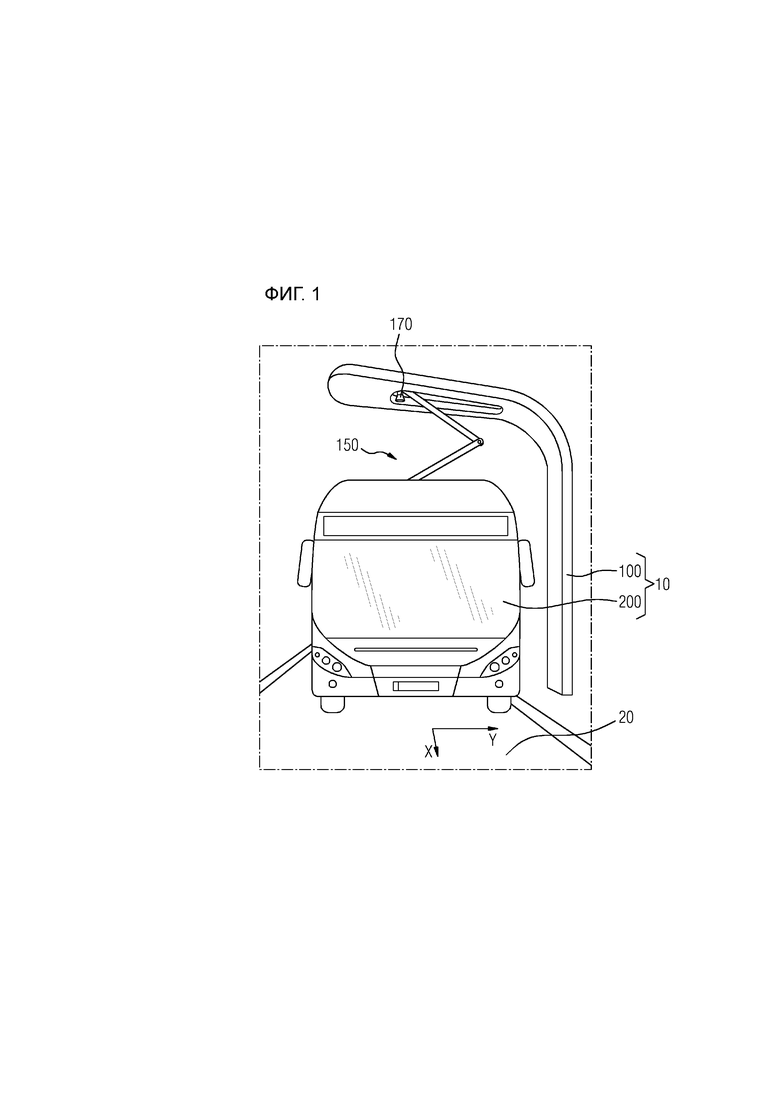
- фиг. 1: систему в соответствии с примером осуществления изобретения;
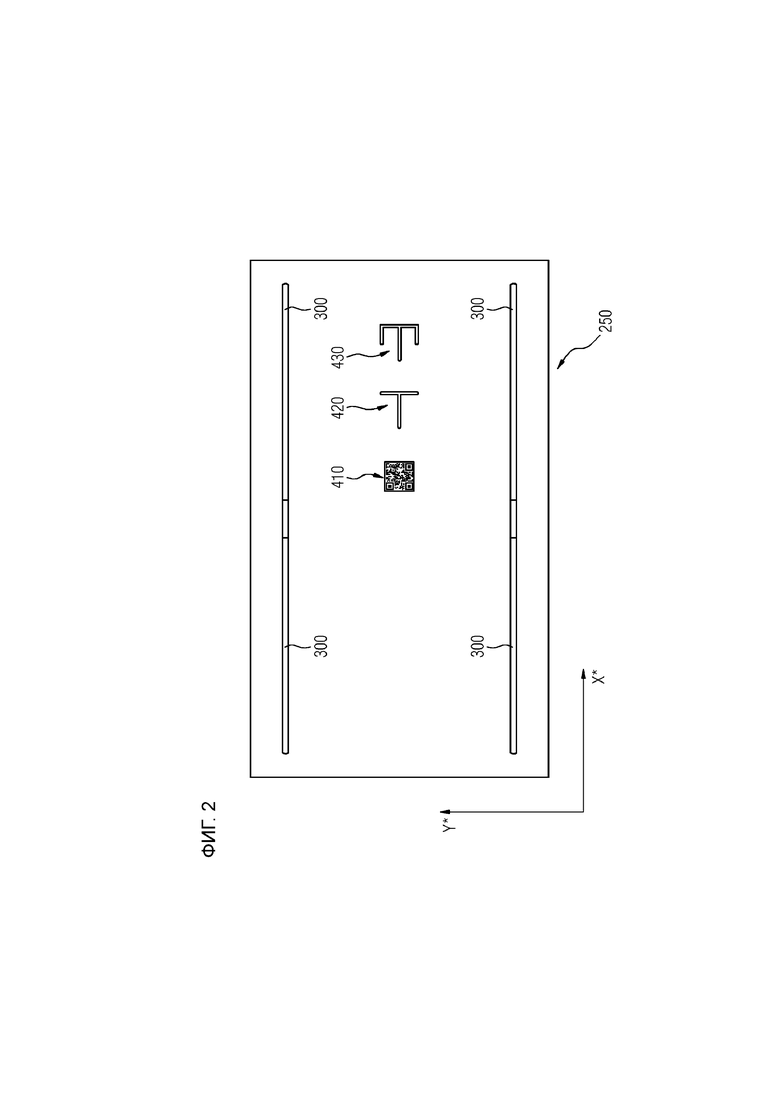
- фиг. 2: в качестве примера схематично контактное устройство сопряжения предложенного транспортного средства.
Осуществление изобретения
На фиг. 1 изображена предложенная система 10 с зарядной станцией 100 и транспортным средством 200, по меньшей мере, частично с электроприводом. Контактное устройство сопряжения 250 (не показано) на крыше транспортного средства 200 расположено по отношению к выполненную, например, в виде пантографа зарядному устройству сопряжения 150 в зоне, где контактное устройство сопряжения 250 может контактировать посредством зарядного устройства сопряжения 150.
Зарядная станция 100 содержит мачту на краю дороги 20 с проходящей в поперечном направлении Y поперек направления Х проезжей части консолью, на которой расположен пантограф. Зарядная станция 100 содержит систему определения положения, которая посредством камеры 170 оптически определяет положение в направлении Х проезжей части и в поперечном направлении Y. Камера 170 регистрирует поле допусков положения для контактирования посредством пантографа.
На фиг. 2 в качестве примера схематично изображено контактное устройство сопряжения 250 предложенного транспортного средства 200. Контактное устройство сопряжения 250 содержит параллельные контактные шины 300. В данном примере контактное устройство сопряжения 250 имеет далее позиционные метки 410, 420, 430. В данном примере схематично изображены три позиционные метки. Однако контактное устройство сопряжения 250 может содержать также только одну, две или более позиционных меток. В данном примере позиционная метка 410 выполнена в виде двухмерного кода, в котором закодирована информация о транспортном средстве. Обе другие позиционные метки 420, 430 выполнены Т-образными с перекладинами, ориентированными в поперечном направлении Y* транспортного средства поперек его направления Х*. За счет этого на изображении камеры хорошо определяется, в частности, угловое отклонение между направлением Х* транспортного средства и направлением Х проезжей части.
В другом варианте предложены устройство и способ, с помощью которых можно надежно и точно определить положение и ориентацию транспортных средств с электроприводом, например электробусов, относительно зарядного устройства сопряжения зарядной станции с пантографом в направлении проезжей части и поперек него. Определение положения происходит итеративно и дает соответствующую информацию о положении уже тогда, когда автобус приближается к зарядной станции, так что выработанная позиционным датчиком информация о положении может использоваться в качестве задающего параметра для водителя.
Для оптического определения положения в одном варианте используется камера. Поле зрения камеры направлено на поле допусков положения. Поскольку контактное устройство сопряжения находится на крыше автобуса, камера направлена на контактное устройство сопряжения сверху вертикально или под заданным углом.
Камера связана с устройством обработки, которое по изображениям камеры вычисляет сигналы для ориентирования и положения позиционной метки. Устройство обработки может быть микропроцессором или ПК.
Камера может быть, например, инфракрасной камерой, которая регистрирует окружение поля допусков положения, в котором должно находиться контактное устройство сопряжения, с тем чтобы оно могло контактировать посредством зарядного устройства сопряжения.
Упомянутое окружение может подсвечиваться посредством специальной ИК-подсветки. Этим можно достичь независимости от дневного света и повысить устойчивость к световым эффектам.
Расчет положения контактного устройства сопряжения на автобусе может осуществляться на основе признаков, возникающих от геометрии контактного устройства сопряжения.
Определение положения может быть еще более надежным и независимым, если в зоне контактного устройства сопряжения имеются одна или несколько позиционных меток. Позиционные метки могут быть тогда специально выполнены оптически и/или геометрически так, что становится возможным надежное оптическое определение положения при любых дневных и погодных условиях.
Поэтому в одном варианте позиционная метка/позиционные метки выполнена/выполнены в виде инфракрасного отражателя. Дополнительно или в качестве альтернативы позиционная метка может содержать один или несколько инфракрасных светодиодов.
Устройство обработки горизонтально в двух измерениях определяет по отображенному положению обнаруженной/обнаруженных позиционной метки/позиционных меток на изображении камеры положение контактного устройства сопряжения автобуса относительно зарядной станции. В качестве опции, используя отображенную величину обнаруженной/обнаруженных позиционной метки/позиционных меток на изображении камеры, определить положение контактного устройства сопряжения автобуса относительно зарядной станции также вертикально.
Определенное относительное положение подается на блок управления зарядкой. Блок управления зарядкой использует информацию о положении, чтобы указать водителю положение контактного устройства сопряжения автобуса относительно зарядной станции. Это может осуществляться, например, посредством указателей направления, таких как стрелки, светофор или дисплей на зарядной станции.
Светофор особенно предпочтителен, если зарядная станция выполнена с возможностью инициирования процесса зарядки только тогда, когда автобус паркуется в пределах заданного зарядным устройством сопряжения поля допусков положения, так что контактное устройство сопряжения находится в зоне, где оно должно находиться, с тем чтобы оно могло контактировать посредством зарядного устройства сопряжения. Последняя функциональность может быть реализована также без указателей направления.
Дополнительно или в качестве альтернативы информация о положении может передаваться на автобус, например, по беспроводной сети, например WLAN, и, таким образом, телеметрироваться. Тогда информация о положении может указываться водителю в режиме реального времени на дисплее в автобусе.
Некоторые автобусы могут опускаться на стороне входа, чтобы облегчить вход пассажирам. Это называется книлингом.
Используя информацию о положении, можно дополнительно или в качестве альтернативы передавать способному к книлингу автобусу информацию о том, возможен ли или нет книлинг в данном положении транспортного средства. Соответствующее инициирование этой функции может зависеть от этой информации.
Отражатели могут быть далее в качестве опции обогреваемыми. Тогда ледяные и/или снеговые отложения могут оттаять. В частности, обогрев отражателей может происходить при недостижении предельной температуры и/или при обнаружении снегопада, так что лед не может образоваться и/или снег тает уже при выпадении.
Позиционная метка может содержать простую геометрическую фигуру. Фигура может иметь заданную величину, так что по отображающим свойствам камеры можно сделать вывод о расстоянии между позиционной меткой и камерой. Тогда можно определить также вертикальное положение позиционной метки.
Дополнительно или в качестве альтернативы геометрической фигуре в транспортном средстве может быть предусмотрен двухмерный код, например QR-код, в котором закодирована информация о типе, идентификационном номере и/или высоте транспортного средства.
Позиционная метка/позиционные метки может/могут содержать соответственно расположенные, селективно отражающие и/или излучающие в определенном диапазоне длин волн элементы, например цветные или инфракрасные светодиоды. За счет этого позиционная метка обнаруживается еще надежнее.
Позиционная метка может использоваться дополнительно к передаче информации, чтобы, например, передать идентификационный номер транспортного средства, когда активно излучающие элементы излучают с соответствующей модуляцией.
При беспроводной передаче информации между зарядной станцией и электробусом должна быть создана однозначная взаимосвязь между находящимся под зарядной станцией транспортным средством и этой зарядной станцией (ассоциация). Она может быть достигнута, если камера считывает посланную активной позиционной меткой информацию и использует ее для однозначной взаимосвязи между транспортным средством и зарядной станцией.
При использовании камеры она может использоваться далее предпочтительно в сервисных целях, например для сервиса устройств сопряжения, за счет того, что изображение камеры передается, например, на сервисный монитор.
Благодаря изобретению со сравнительно небольшими затратами можно точно определить положение и ориентацию автобуса относительно требуемого для зарядки поля допусков положения.
Это может осуществляться, в частности, еще на этапе приближения транспортного средства. Таким образом, водителю сообщается информация о положении для надежного достижения точного положения зарядки транспортного средства. Это уменьшает необходимое маневрирование для достижения поля допусков положения и повышает надежность позиционирования.
Кроме того, из информации о положении можно надежно судить о том, можно ли или нельзя активировать процесс зарядки блоком управления зарядкой и/или допустим ли книлинг транспортного средства в пределах контактного поля или следует блокировать его.
Хотя изобретение было подробно проиллюстрировано и описано предпочтительным примером его осуществления, оно не ограничено им, и специалист может вывести другие варианты, не выходя за объем охраны изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАРЯДНОЕ УСТРОЙСТВО ДЛЯ ЭЛЕКТРИЧЕСКИ ЗАРЯЖАЕМОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2668453C2 |
| КОНТАКТНОЕ УСТРОЙСТВО, ТРАНСПОРТНОЕ СРЕДСТВО И ЗАРЯДНАЯ СТАНЦИЯ | 2019 |
|
RU2784652C1 |
| КОНТАКТНЫЙ БЛОК ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА, РАБОТАЮЩЕГО НА ЭЛЕКТРИЧЕСКОЙ БАТАРЕЕ | 2017 |
|
RU2739530C1 |
| СИСТЕМА БЫСТРОЙ ЗАРЯДКИ И СПОСОБ ЭЛЕКТРИЧЕСКОГО СОЕДИНЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА С ЗАРЯДНОЙ СТАНЦИЕЙ | 2019 |
|
RU2787600C2 |
| ЗАРЯДНЫЙ УЗЕЛ ДЛЯ ЗАРЯДКИ ЭЛЕКТРИЧЕСКОГО ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2779621C1 |
| ЗАРЯДНАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2632565C2 |
| КОНТАКТНЫЙ БЛОК ДЛЯ ЗАРЯДНОЙ СТАНЦИИ И СПОСОБ ОБРАЗОВАНИЯ КОНТАКТА | 2018 |
|
RU2749365C2 |
| ЗАРЯДНАЯ СТАНЦИЯ ДЛЯ ЭЛЕКТРИЧЕСКИХ ТРАНСПОРТНЫХ СРЕДСТВ | 2016 |
|
RU2720394C2 |
| УНИВЕРСАЛЬНОЕ ЗАРЯДНОЕ УСТРОЙСТВО | 2010 |
|
RU2507661C2 |
| ЗАРЯДНАЯ СИСТЕМА ДЛЯ ЭЛЕКТРИЧЕСКИХ ТРАНСПОРТНЫХ СРЕДСТВ | 2011 |
|
RU2520616C1 |
Группа изобретений относится к системе определения положения контактного устройства сопряжения транспортного средства, относительно контактного устройства сопряжения зарядной станции для транспортного средства и транспортному средству с электроприводом. Система выполнена с возможностью оптического определения положения, минимум в двух измерениях, с использованием минимум одной позиционной метки, выполненной с возможностью селективного отражения и/или излучения света в заданном диапазоне длин волн. Зарядная станция может содержать блок инфракрасной подсветки определенной зоны инфракрасным светом, которая включает минимум одно поле допусков положения, в котором должно находиться контактное устройство сопряжения. Транспортное средство может содержать нагревательный элемент для обогрева позиционной метки. Система может содержать телеметрические блоки для передачи данных о положении между зарядной станцией и транспортным средством, при этом транспортное средство отображает на дисплее телеметрическое положение транспортного средства. Позиционная метка может содержать геометрические фигуры, коды или светодиоды, с помощью которых может обеспечиваться связь между транспортным средством и зарядной станцией. Достигается повышение точности взаимного позиционирования контактных устройств зарядной станции и транспортного средства. 4 н. и 12 з.п. ф-лы, 2 ил.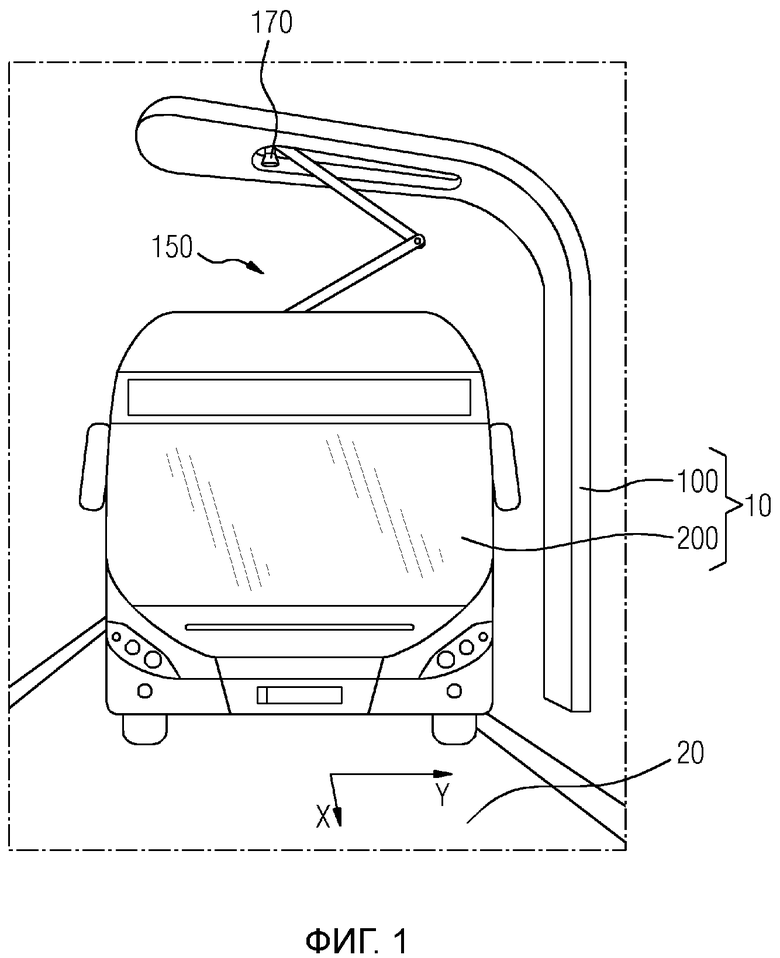
1. Система (10) определения положения контактного устройства сопряжения (250) транспортного средства (200) по меньшей мере частично с электроприводом, относительно зарядного устройства сопряжения (150) зарядной станции (100) для транспортного средства (200), отличающаяся тем, что система выполнена с возможностью оптического определения положения по меньшей мере в двух измерениях с использованием по меньшей мере одной позиционной метки (410, 420, 430), выполненной с возможностью селективного отражения и/или излучения света в заданном диапазоне длин волн.
2. Система по п. 1, которая выполнена с возможностью определения положения с использованием геометрических признаков контактного устройства сопряжения (250).
3. Система по пп. 1 или 2, которая включает камеру (170) и блок обработки, выполненную с возможностью определения положения с использованием изображений камеры (170).
4. Система по п. 3, в которой камера (170) выполнена в виде инфракрасной камеры.
5. Система по любому из пп. 2 - 4, в которой определение положения включает определение расстояния от контактного устройства сопряжения (250) до зарядного устройства сопряжения (150) с использованием величины позиционной метки (410, 420, 430) на изображении камеры.
6. Зарядная станция (100) для транспортного средства (200) по меньшей мере частично с электроприводом, которая содержит систему определения положения по любому из пп. 3-5, содержащая также блок инфракрасной подсветки определенной зоны инфракрасным светом, причем эта зона включает, по меньшей мере, одно поле допусков положения, в котором должно находиться контактное устройство сопряжения (250), с которым осуществляется контакт посредством зарядного устройства сопряжения (150).
7. Станция по п. 6, которая выполнена с возможностью инициирования процесса зарядки только тогда, когда определение положения покажет, что контактное устройство сопряжения (250) находится в поле допусков положения.
8. Транспортное средство (200), выполненное с возможностью приведения в движение по меньшей мере частично от электропривода, содержащее накопитель электрической энергии и контактное устройство сопряжения (250), выполненное с возможностью контактирования посредством зарядного устройства сопряжения (150) зарядной станции (100) с возможностью зарядки накопителя, отличающееся тем, что контактное устройство сопряжения (250) содержит по меньшей мере одну позиционную метку (410, 420, 430), выполненную с возможностью селективного отражения или излучения света в заданном диапазоне длин волн.
9. Транспортное средство по п. 8, в котором позиционная метка (410, 420, 430) содержит геометрические фигуры или коды.
10. Транспортное средство по п. 8, в котором позиционная метка (410, 420, 430) содержит светодиоды.
11. Транспортное средство по любому из пп. 8-10, содержащее нагревательный элемент для обогрева позиционных меток.
12. Система (10) определения положения контактного устройства сопряжения (250) относительно зарядного устройства сопряжения (150) с транспортным средством (200) по любому из пп. 8-11 и зарядной станцией (100) по п. 7.
13. Система по п. 12, в которой транспортное средство (200) и зарядная станция (100) содержат по одному блоку для передачи данных, а зарядная станция (100) выполнена с возможностью передачи определенного положения транспортному средству (200).
14. Система по п. 12, в которой зарядная станция и/или транспортное средство содержит телеметрический блок для телеметрирования определенного положения, причем транспортное средство содержит дисплей и выполнено с возможностью отображения на дисплее телеметрированного положения транспортного средства.
15. Система по п. 12, в которой через геометрические фигуры или коды передают информацию, обеспечивающую однозначную взаимосвязь между транспортным средством и зарядной станцией.
16. Система по п. 12, в которой через светодиоды передают информацию, обеспечивающую однозначную взаимосвязь между транспортным средством и зарядной станцией.
| JP 2014215645 A, 17.11.2014 | |||
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПРОГРАММНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ДВИЖЕНИЕМ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2523186C1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| DE 102011109834 A1, 14.02.2013 | |||
| Токарный резец | 1924 |
|
SU2016A1 |
| DE 102014219466 A1, 31.03.2016. | |||

