Изобретение относится к машиностроению, а именно, к инерционным аккумуляторам энергии.
Известна конструкция маховика переменного момента инерции, содержащего корпус с внутренней камерой, заполненной подвижной средой (RU, №2175085, опубл. 20.10.2001)
В периферийной части камеры размещено капиллярно-пористое вещество. Устройство нагрева и устройство охлаждения соприкасаются с подвижной средой и капиллярно-пористым веществом. Обеспечивается расширение эксплуатационных свойств за счет возможности регулирования момента инерции путем изменения расстояния между осью вращения и центром масс независимо от скорости вращения маховика. К недостаткам этого маховика относится необходимость использования специфического капиллярно-пористого вещества и устройства нагрева и охлаждения. Это приводит к сложности реализации, а также большим временным задержкам при необходимости изменения момента инерции.
Известна конструкция маховика переменного момента инерции (см.патент №2435084 - кл. МПК F16F 15/31, 2011). Маховик содержит полый диск прямоугольного сечения из магнитомягкого материала, заполненный ферромагнитной жидкостью. Диск жестко закреплен на полом валу из немагнитного материала. Кольцевая немагнитная вставка расположена на внутреннем радиусе центрального отверстия диска. Внутри вала имеется полость, в которой на шлицах установлен постоянный магнит с возможностью осевого перемещения посредством винтовой передачи. При раскручивании маховика, по мере перемещения постоянного магнита к центру диска маховика, увеличивается магнитный поток, воздействующий на ферромагнитную жидкость. Это приводит к тому, что частицы жидкости притягиваются к стенкам маховика, увеличивая его момент инерции. Достигаются легкий пуск и плавное регулирование момента инерции маховика.
К недостаткам данной реализации следует отнести специфику используемой жидкости, что ограничивает сферу его применения в области энергетического машиностроения.
Наиболее близким по технической реализации является МАХОВИК ПЕРЕМЕННОГО МОМЕНТА ИНЕРЦИИ (RU, №2671435, опубл. 31.10.2018). Маховик переменного момента инерции содержит две полуоси, на которых жестко закреплена внешняя камера цилиндрической формы, внутри которой жестко закреплена коаксиально расположенная внутренняя камера. Во внутренней камере расположен поршень с возможностью перемещения вдоль оси маховика посредством штока. Между цилиндрической поверхностью внешней камеры и цилиндрической поверхностью внутренней камеры расположен кольцеобразный поршень, который выполнен с возможностью перемещения вдоль стенок коаксиальных цилиндрических поверхностей. Полости, расположенные под цилиндрическим и кольцеобразным поршнями, гидравлически связаны между собой и заполнены жидкостью. Полости над поршнями сообщены между собой и заполнены воздухом. Перемещение цилиндрического поршня приводит к перемещению жидкости из центральной части маховика к его периферийной области, либо наоборот. Это позволяет изменять момент инерции маховика внешним управляющим воздействием на шток, приводящий в движение цилиндрический поршень. При этом изменение момента инерции маховика не требует изменения скорости его вращения. К недостаткам этого маховика относится:
- малый диапазон изменения момента инерции;
- исходное значение момента инерции маховика достаточно велико, так как при минимальном моменте инерции периферийная область наполовину заполнена жидкостью.
Технической задачей предлагаемого изобретения является обеспечение возможности управляемого регулирования в широком диапазоне момента инерции маховика, не требующего изменения скорости его вращения.
Технический результат заключается в расширении области применения маховика переменного момента инерции за счет возможности его использования как для стабилизации частоты вращения, так и для управления частотой вращения рабочих агрегатов в соответствии с требуемым алгоритмом.
Это достигается тем, что известный маховик переменного момента инерции, содержащий жестко закрепленную на нижней и верхней полуосях внутреннюю камеру цилиндрической формы, внутри которой расположен внутренний поршень цилиндрической формы, жестко закрепленный со штоком управления, расположенным в цилиндрическом отверстии верхней полуоси, выполненные с возможностью линейного перемещения, согласно изобретению, снабжен нижним фланцем цилиндрической формы соосным внутренней камере, жестко закрепленным с ней в нижней части внешней боковой цилиндрической поверхности камеры, и расположенным соосно с ним верхним фланцем цилиндрической формы, жестко закрепленным с внутренней камерой в верхней части ее внешней боковой цилиндрической поверхности, между нижним и верхним фланцами на внутренних торцевых поверхностях их периферийной части жестко закреплены внешние цилиндры, которые располагаются на одинаковом расстоянии друг от друга, пространство внутри цилиндров образуют внешние полости, в которых расположены внешние поршни цилиндрической формы, жестко закрепленные с синхронизирующими штоками, расположенными в цилиндрических отверстиях, выполненных в верхнем фланце соосно с внешними цилиндрами, внешние поршни и синхронизирующие штоки выполнены с возможностью линейного перемещения, все синхронизирующие штоки жестко связаны между собой в своей верхней части кольцом, пространства внутренней полости над внутренним поршнем и внешние полости над внешними поршнями соединены верхними каналами, расположенными в верхней части пространства между внутренней камерой и внешними цилиндрами, заполнены воздухом и выполнены герметично по отношению к внешней среде, пространства внутренней полости под внутренним поршнем и внешние полости под внешними поршнями соединены нижними каналами, расположенными в нижней части пространства между внутренней камерой и внешними цилиндрами, заполнены рабочим телом, например, жидкостью и выполнены герметично по отношению к внешней среде, объем внутренней камеры равен суммарному объему внешних цилиндров.
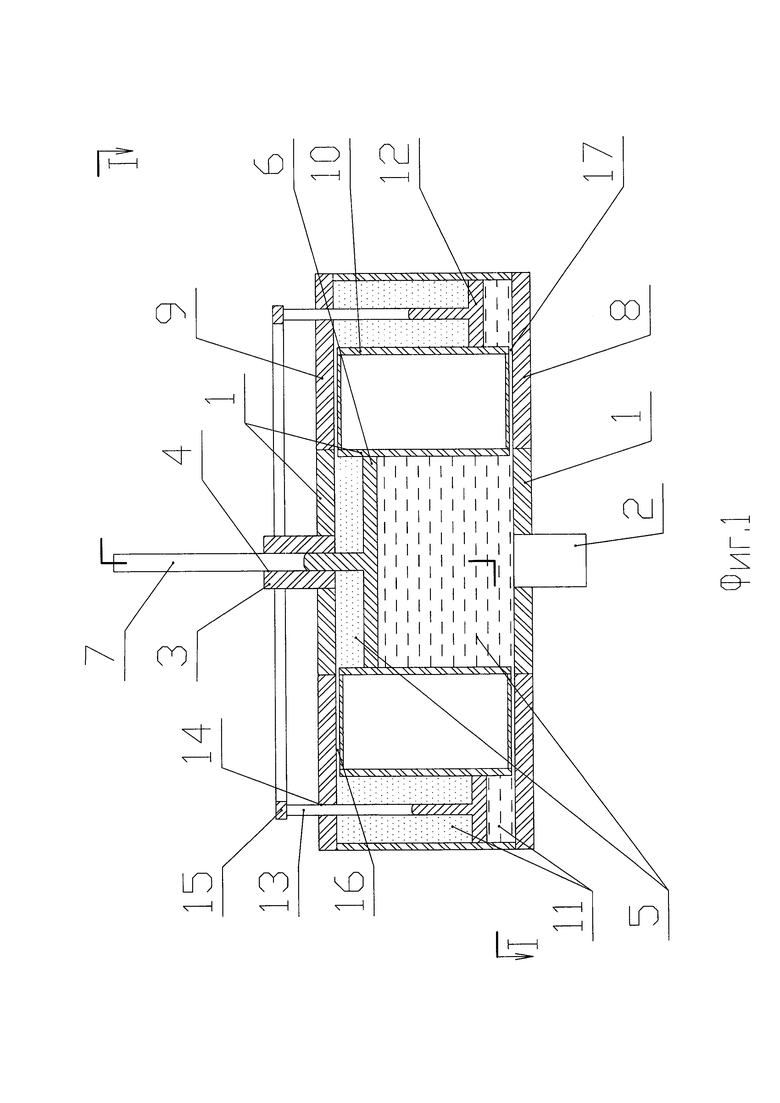
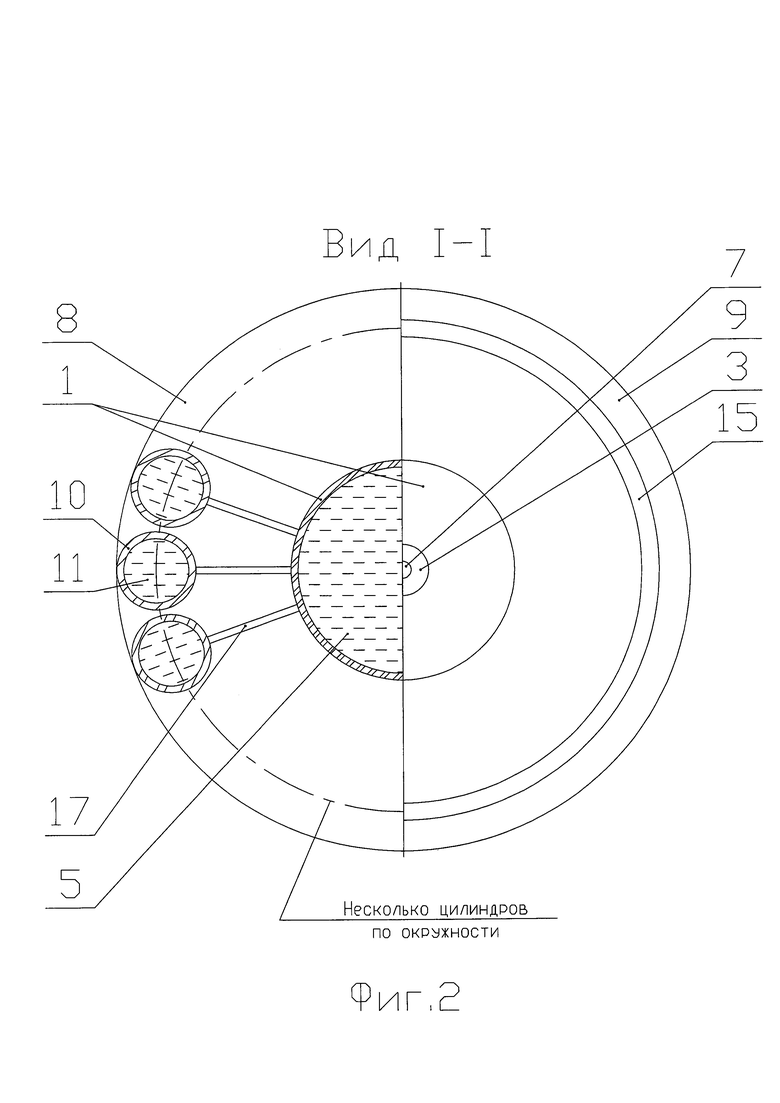
Сущность изобретения поясняется фигурами 1 и 2. Маховик переменного момента инерции содержит внутреннюю камеру 1 цилиндрической формы, жестко закрепленную на нижней полуоси 2 и верхней полуоси 3, причем верхняя полуось 3 выполнена с цилиндрическим отверстием 4 в центральной части. При этом пространство внутри камеры 1 образует внутреннюю полость 5. Во внутренней полости 5 расположен внутренний поршень 6 цилиндрической формы, жестко закрепленный со штоком управления 7, расположенным в цилиндрическом отверстии 4 верхней полуоси 3, выполненные с возможностью линейного перемещения. Нижний фланец 8 цилиндрической формы, выполненный соосно с внутренней камерой 1 и жестко закрепленный с ней, примыкает к нижней части внешней боковой цилиндрической поверхности внутренней камеры 1. Верхний фланец 9 цилиндрической формы, выполненный соосно с внутренней камерой 1 и жестко закрепленный с ней, примыкает к верхней части внешней боковой цилиндрической поверхности внутренней камеры 1. Между верхним фланцем 9 и нижним фланцем 8 на внутренних торцевых поверхностях их периферийной части жестко закреплены внешние цилиндры 10, которые располагаются на одинаковом расстоянии друг от друга. Количество внешних цилиндров определяется в зависимости от диаметра фланцев и диаметра внешних цилиндров. При этом пространство внутри внешних цилиндров 10 образуют внешние полости 11. Во внешних полостях 11 расположены внешние поршни 12 цилиндрической формы, жестко закрепленные с синхронизирующими штоками 13, расположенными в цилиндрических отверстиях 14, выполненных в верхнем фланце 9 соосно с внешними цилиндрами 10. Внешние поршни 12 и синхронизирующие штоки 13 выполнены с возможностью линейного перемещения. Все синхронизирующие штоки 13 жестко связаны между собой в своей верхней части кольцом 15.
Пространства внутренней полости 5 над внутренним поршнем 6 и внешние полости 11 над внешними поршнями 12 соединены верхними каналами 16, расположенными в верхней части пространства между внутренней камерой 1 и внешними цилиндрами 10, заполнены воздухом и выполнены герметично по отношению к внешней среде.
Пространства внутренней полости 5 под внутренним поршнем 6 и внешние полости 11 под внешними поршнями 12 соединены нижними каналами 17, расположенными в нижней части пространства между внутренней камерой 1 и цилиндрами 10, заполнены рабочим телом, например, жидкостью и выполнены герметично по отношению к внешней среде.
Маховик переменного момента инерции работает следующим образом.
Минимальный момент инерции маховика соответствует верхнему положению внутреннего поршня 6 и нижнему положению внешних поршней 12. В этом положении фактически вся жидкость находится в центральной части маховика - во внутренней полости 5 под внутренним поршнем 6. Минимальный момент инерции маховика, как правило, используют в системах автоматического управления для режима холостого хода, предшествующего выходу на номинальные обороты рабочих агрегатов.
Изменение момента инерции маховика осуществляется линейным перемещением внутреннего поршня 6 совместно со штоком управления 7.
При этом шток управления 7 перемещается вдоль цилиндрического отверстия 4, а внутренний поршень 6 - вдоль внутренней цилиндрической поверхности внутренней камеры 1.
При перемещении внутреннего поршня 6 из верхнего в нижнее положение жидкость из внутренней полости 5 под внутренним поршнем 6 перемещается по нижним каналам 17 во внешние полости 11 под внешними поршнями 12, что приводит к перемещению внешних поршней 12 в верхнее положение. При этом воздух над внешними поршнями 12 из внешней полости 11 вытесняется по верхним каналам 16 в пространство внутренней полости 5 над внутренним поршнем 6. Это приводит к увеличению момента инерции в силу того, что жидкость из центральной области маховика перемещается к его периферии. Максимальный момент инерции маховика достигается при верхнем положении внешних поршней 12.
При перемещении внутреннего поршня 6 из нижнего положения в верхнее жидкость под внешними поршнями 12 из внешней полости 11 перемещается по нижним каналам 17 во внутреннюю полость 5 под внутренним поршнем 6, а воздух из внутренней полости 5 над внутренним поршнем 6 перемещается по верхним каналам 16 в пространство внешней полости 11 над внешними поршнями 12, что приводит к перемещению внешних поршней 12 из верхнего положения в нижнее. Это приводит к уменьшению момента инерции в силу того, что жидкость из периферийной области маховика перемещается в его центральную область.
Линейное перемещение внутреннего поршня 6 осуществляют внешним воздействием исполнительного механизма на шток управления 7 в соответствии с алгоритмом системы управления технологическим процессом.
Синхронное перемещение всех внешних поршней 12 при любом внешнем управляющем воздействии обеспечивается тем, что синхронизирующие штоки 13 жестко связаны между собой в своей верхней части кольцом 15. Это позволяет избегать режимов разбалансировки маховика.
Диаметры внутренней камеры, фланцев и внешних цилиндров, а также их количество определяется требуемыми характеристиками маховика. При этом максимальный диапазон изменения момента инерции маховика обеспечивается при равенстве объемов внутренней камеры и суммарного объема внешних цилиндров. Расположение внешних цилиндров по внешней окружности фланцев на одинаковом расстоянии друг от друга должно обеспечивать динамическую и статическую балансировку маховика.
Получение технического результата достигается как перемещением жидкости из центральной области маховика к его периферийной области, так и обратным перемещением жидкости из периферийной области в центральную, что приводит соответственно к управляемому увеличению, или к уменьшению момента инерции. Расширение диапазона регулирования момента инерции маховика обеспечивается возможностью выбора требуемых параметров для периферийных цилиндров и расстояния их расположения от оси вращения. При этом предлагаемая реализация маховика обеспечивает минимальный момент инерции при нахождении всей жидкости в центральной части маховика, что обеспечивает легкий пуск маховика и выведение его на номинальный режим работы.
Предлагаемое изобретение позволяет решать широкий круг задач, как по выбору момента инерции маховика, соответствующего номинальному значению частоты вращения рабочих агрегатов, так и по выбору диапазона регулирования момента инерции маховика относительно его номинального значения.
Под номинальным значением здесь понимается среднее значение момента инерции маховика, относительно его максимального и минимального значения.
Диапазон изменения момента инерции маховика определяется выбором необходимого объема внутренней полости 5, в которой должна помещаться требуемая масса жидкости, а также выбором диаметра нижнего фланца 8 и верхнего фланца 9, изменение которых позволяет смещать расположение внешних полостей 11 по отношению к внутренней полости 5. При этом соблюдение равенства объемов внутренней полости 5 и суммарного объема внешних полостей 11 обеспечивает максимальный диапазон изменения момента инерции маховика для выбранного диаметра фланцев 8 и 9. Требуемый суммарный объем внешних полостей 11 определяет необходимое количество и размеры внешних цилиндров 10.
Таким образом, предлагаемая конструкция маховика позволяет: использовать маховик в системах автоматического управления технологическими процессами, в работе которых необходимо поддерживать требуемые технологические параметры, зависящие от частоты вращения рабочих агрегатов;
- существенно расширить диапазон управляемого изменения момента инерции маховика относительно его номинального значения за счет выбора необходимого объема внутренней полости, в которой должна помещаться требуемая масса жидкости;
- реализовать требуемое значение номинального момента инерции маховика путем выбора необходимого диаметра верхнего и нижнего фланцев и размеров внешних цилиндров;
- регулировать момент инерции маховика относительно его номинального момента инерции независимо от скорости вращения маховика;
- снизить момент инерции маховика в режиме его разгона до номинальных оборотов за счет размещения всей жидкости в центральной области маховика;
- работать маховику как в вертикальном, так и горизонтальном положении.
Предлагаемая конструкция маховика более технологична по отношению к рассмотренному прототипу в силу отсутствия таких элементов, как кольцеобразный поршень с закрепленными на нем радиальными перегородками.
При использовании предлагаемого изобретения в системах управления гидроагрегатов при переходных процессах и аварийных режимах, возникающих при резком сбросе нагрузки большой суммарной мощности, характерных для малых гидроэлектростанций, маховик, сопряженный с гидроагрегатом, создает дополнительный тормозящий момент для гидроагрегата, предотвращая его неуправляемый разгон. Также он позволяет осуществлять управляемое демпфирование случайных возмущений, связанных с не стационарностью гидропотока, и запасать механическую энергию в период, предшествующий ожидаемому увеличению электрической нагрузки, для предотвращения аварийного снижения оборотов гидроагрегата, связанного с резким набором нагрузки большой суммарной мощности, заранее увеличивая момент инерции вращающегося маховика под воздействием внешнего управления.
Кроме того, подобное устройство может найти применение в ветроэнергетике.
| название | год | авторы | номер документа |
|---|---|---|---|
| Маховик переменного момента инерции | 2018 |
|
RU2689051C1 |
| МАХОВИК ПЕРЕМЕННОГО МОМЕНТА ИНЕРЦИИ | 2017 |
|
RU2671435C1 |
| РЕФРИЖЕРАТОРНАЯ УСТАНОВКА | 1994 |
|
RU2091675C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1997 |
|
RU2146010C1 |
| МНОГОЦИЛИНДРОВЫЙ БЕСШАТУННЫЙ ОППОЗИТНЫЙ ЧЕТЫРЕХТАКТНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2005 |
|
RU2296871C1 |
| ВИБРОИСТОЧНИК | 2006 |
|
RU2318611C1 |
| КОЛЕСНАЯ БРОНЕМАШИНА | 2005 |
|
RU2314478C2 |
| Способ динамического гашения колебаний объекта защиты и устройство для его осуществления | 2017 |
|
RU2654890C1 |
| Магнитореологический амортизатор | 2015 |
|
RU2645484C2 |
| ГИДРОМОЛОТ | 1998 |
|
RU2142037C1 |
Изобретение относится к машиностроению. Маховик переменного момента инерции содержит жестко закрепленную на нижней и верхней полуосях внутреннюю камеру цилиндрической формы. В полости камеры расположен поршень, жестко скрепленный со штоком управления. Шток расположен в отверстии верхней полуоси. Между нижним и верхним фланцами на внутренних торцевых поверхностях их периферийной части жестко закреплены внешние цилиндры. Внутри цилиндров находятся внешние полости, в которых расположены внешние поршни. Поршни жестко закреплены с синхронизирующими штоками. Все синхронизирующие штоки жестко связаны между собой в своей верхней части кольцом. Пространства внутренней полости над внутренним поршнем и внешние полости над внешними поршнями соединены верхними каналами и заполнены воздухом. Пространства внутренней полости под внутренним поршнем и внешние полости под внешними поршнями соединены нижними каналами и заполнены рабочим телом, например жидкостью. Объем внутренней камеры равен суммарному объему внешних цилиндров. Достигается возможность использования маховика как для стабилизации частоты вращения, так и для управления частотой вращения рабочих агрегатов. 2 ил.
Маховик переменного момента инерции, содержащий жестко закрепленную на нижней и верхней полуосях внутреннюю камеру цилиндрической формы, пространство внутри камеры образует внутреннюю полость, в которой расположен внутренний поршень цилиндрической формы, жестко скрепленный со штоком управления, расположенным в цилиндрическом отверстии верхней полуоси, выполненный с возможностью линейного перемещения, отличающийся тем, что он снабжен нижним фланцем цилиндрической формы, соосным внутренней камере, жестко закрепленным с ней в нижней части внешней боковой цилиндрической поверхности камеры и расположенным соосно с ним верхним фланцем цилиндрической формы, жестко закрепленным с внутренней камерой в верхней части ее внешней боковой цилиндрической поверхности, между нижним и верхним фланцами на внутренних торцевых поверхностях их периферийной части жестко закреплены внешние цилиндры, которые располагаются на одинаковом расстоянии друг от друга, пространство внутри цилиндров образуют внешние полости, в которых расположены внешние поршни цилиндрической формы, жестко закрепленные с синхронизирующими штоками, расположенными в цилиндрических отверстиях, выполненных в верхнем фланце соосно с внешними цилиндрами, внешние поршни и синхронизирующие штоки выполнены с возможностью линейного перемещения, все синхронизирующие штоки жестко связаны между собой в своей верхней части кольцом, пространства внутренней полости над внутренним поршнем и внешние полости над внешними поршнями соединены верхними каналами, расположенными в верхней части пространства между внутренней камерой и внешними цилиндрами, заполнены воздухом и выполнены герметично по отношению к внешней среде, пространства внутренней полости под внутренним поршнем и внешние полости под внешними поршнями соединены нижними каналами, расположенными в нижней части пространства между внутренней камерой и внешними цилиндрами, заполнены рабочим телом, например, жидкостью и выполнены герметично по отношению к внешней среде, объем внутренней камеры равен суммарному объему внешних цилиндров.
| МАХОВИК ПЕРЕМЕННОГО МОМЕНТА ИНЕРЦИИ | 2017 |
|
RU2671435C1 |
| JP S63231034 A, 27.09.1988 | |||
| US 2015204418 A1, 23.07.2015. | |||

