ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Данное изобретение относится к транспортным средствам с электронными системами управления, а конкретнее, к передаче данных в системы управления по шинам транспортного средства в таких транспортных средствах.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Шина транспортного средства, такая как шина локальной сети контроллеров (CAN), предоставляет средство связи между различными вычислительными системами, аспектами одной или более вычислительных систем, датчиком, исполнительными механизмами, и/или тому подобным, на которые полагаются современные транспортные средства различных типов. Так как количество таких элементов в современных транспортных средствах за прошлые годы разрослось, установление отдельных линий связи между этими элементами стало дорогостоящим, обременительным и непрактичным. Требуются большие жгуты проводов и огромные длины проводки, ведущей во всех направлениях по всему транспортному средству. Основанный на шине подход, однако, предоставляет многим элементам возможность передавать и принимать данные через единую физическую среду передачи данных, устраняя соображения затрат и громоздкости, связанные с предоставлением отдельной проводки между элементами.
Тем не менее, так как количество и применения элементов систем управления продолжало быстро увеличиваться, требования к данной шине транспортного средства также возросли, делая пропускную способность шины транспортного средства проблемой, имеющей все возрастающее значение. Хотя нагруженная шина транспортного средства типично не приводит к потере данных связи между элементами транспортного средства, недостаточная пропускная способность часто может приводить к задержанной доставке данных, особенно для данных, не признанных имеющими высокий приоритет, такой как высокий приоритет, связанный с данными, используемыми в системах управления, считающихся имеющими последствия для безопасности. Вследствие срочного характера, обычно связанного с различными типами данных, передаваемых по шине транспортного средства, задержка может приводить к значительным проблемам и даже может исключать некоторые применения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
С тем чтобы преимущества изобретений были без труда понятны, более конкретное описание будет представлено посредством ссылки на характерные варианты осуществления, проиллюстрированные на прилагаемых чертежах. С пониманием, что эти чертежи всего лишь изображают типичные примеры, а потому, не должны считаться ограничивающими по объему, изобретение будет описано и пояснено с дополнительной специфичностью и детализацией посредством использования прилагаемых чертежей, на которых:
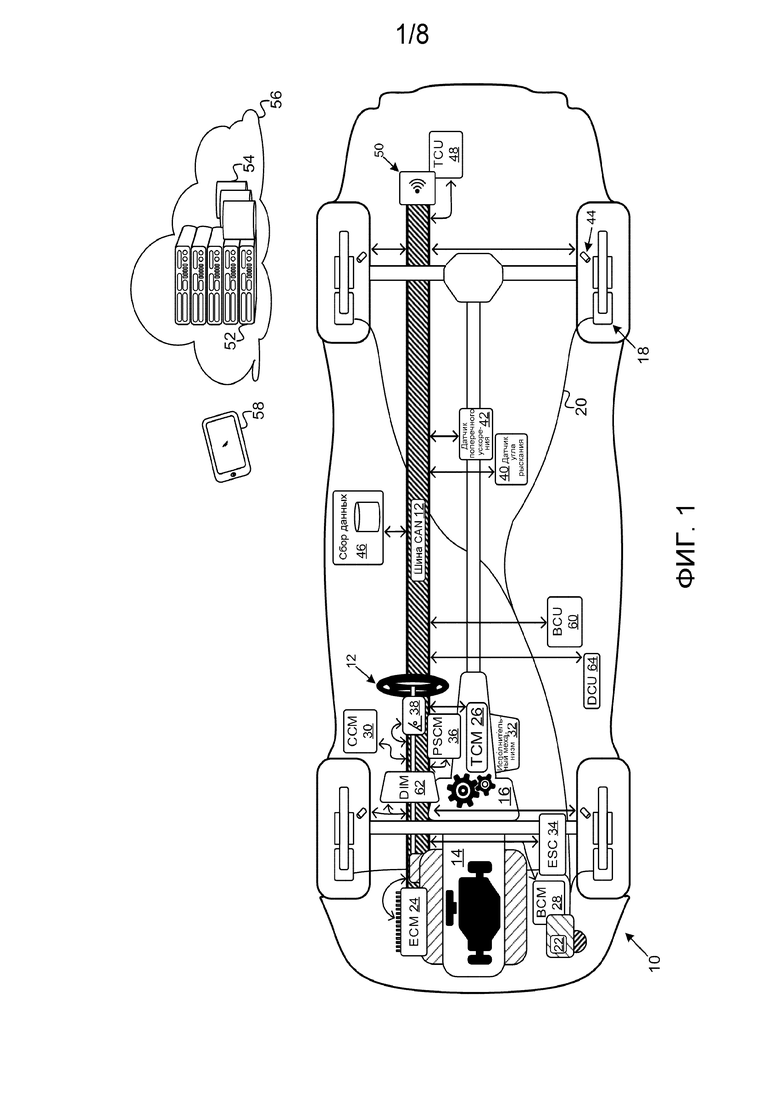
фиг. 1 - принципиальная структурная схема, предоставляющая вид снизу дорожного транспортного средства, имеющего шину транспортного средства, вместе с различными электронными блоками управления (ECU), датчиками, исполнительными механизмами и устройствами хранения данных, которые могут полагаться на шину транспортного средства для передачи данных, используемых, чтобы задействовать различные системы транспортного средства, в соответствии с примерами;
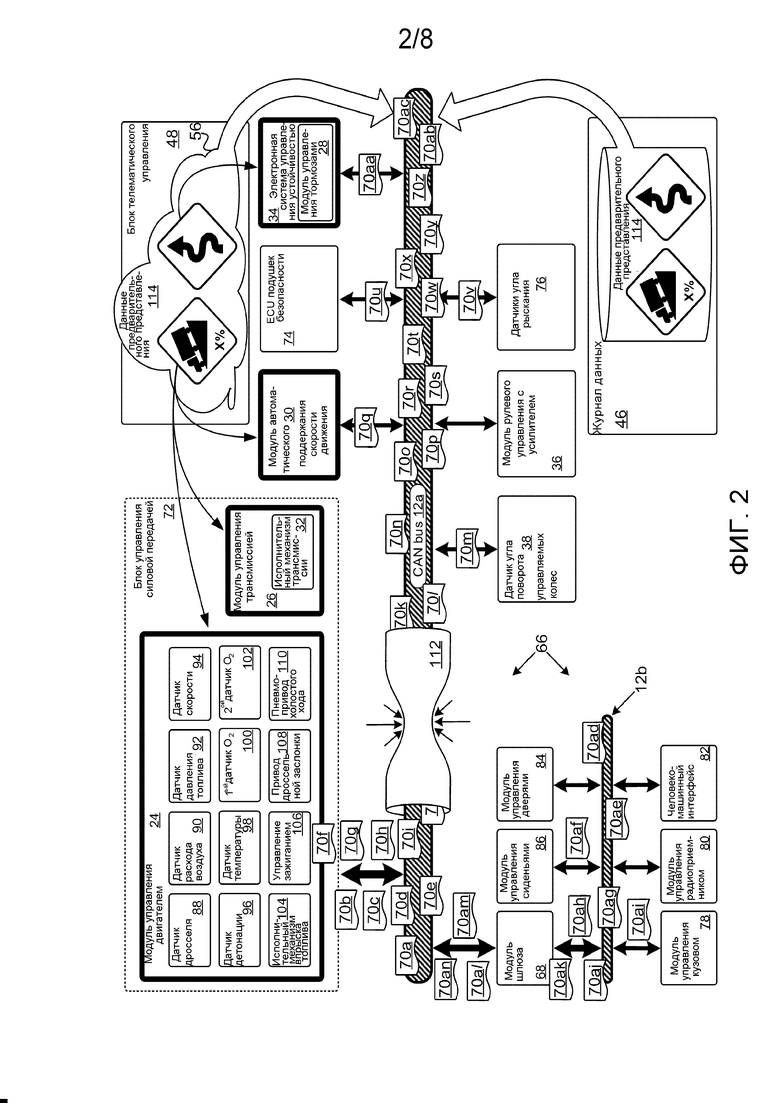
фиг. 2 - принципиальная структурная схема, изображающая проблемы, связанные с введением данных, предварительно представляющих значения примерных атрибутов дороги, которые могут выгодно применяться избранными электрическими системами управления, в соответствии с примерами;
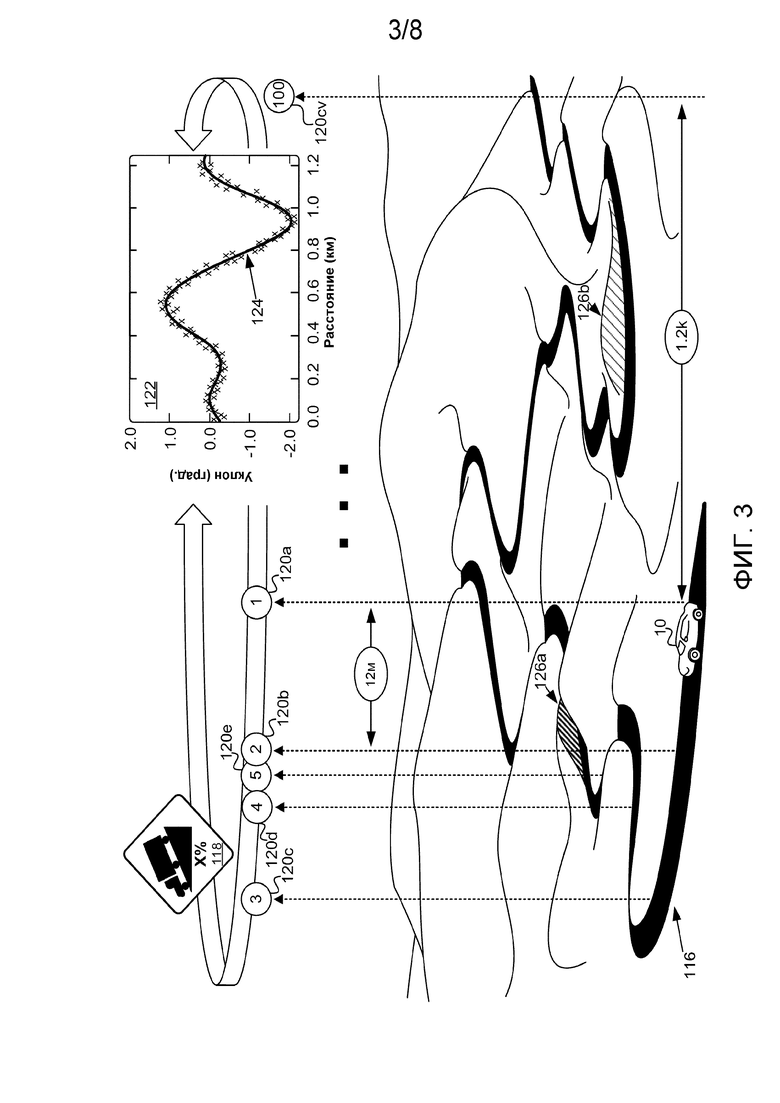
фиг. 3 изображает участок дороги, которая должна проезжаться дорожным транспортным средством, вместе с графиком данных, выражающих будущие значения для примерного атрибута дороги по уклону дорогу, которые индексированы расстояниями между транспортным средством и местами вдоль дороги, в которых измеряются значения признака, график совмещен с функцией, аппроксимирующей такие данные, изображение является иллюстрирующим присущие ограничения как по скорости изменения атрибута дороги, так и возможным амплитудам таких значений, встроенные в лежащую в основе дорогу, по которой измеряются значения, в соответствии с примерами;
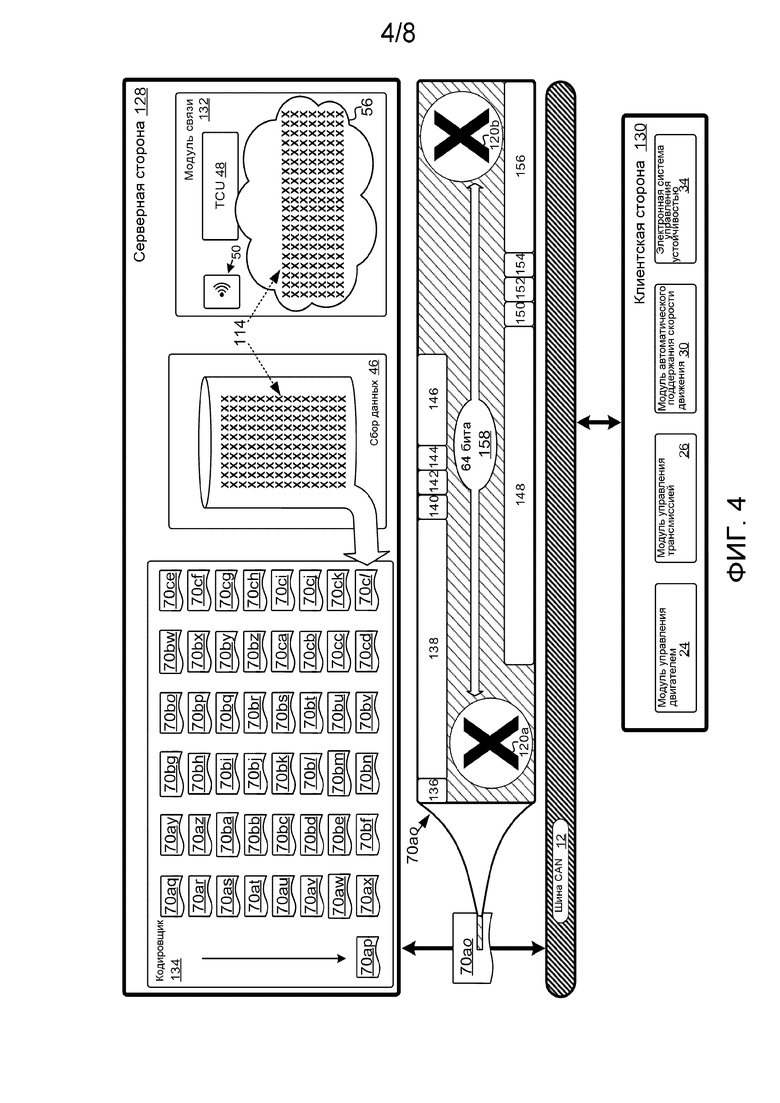
фиг. 4 - принципиальная структурная схема частей электронной системы управления, разделенной на серверную сторону, связанную непосредственно с данными предварительного представления и присоединенную к клиентской стороне через шину транспортного средства, клиентская сторона является присоединенной непосредственно к одной или более электронных систем, способных выгодно применять данные предварительного представления, вместе с неограничивающим примером сообщения, способного доставлять данные предварительного представления по шине транспортного средства, показывающим соображения сжатия;
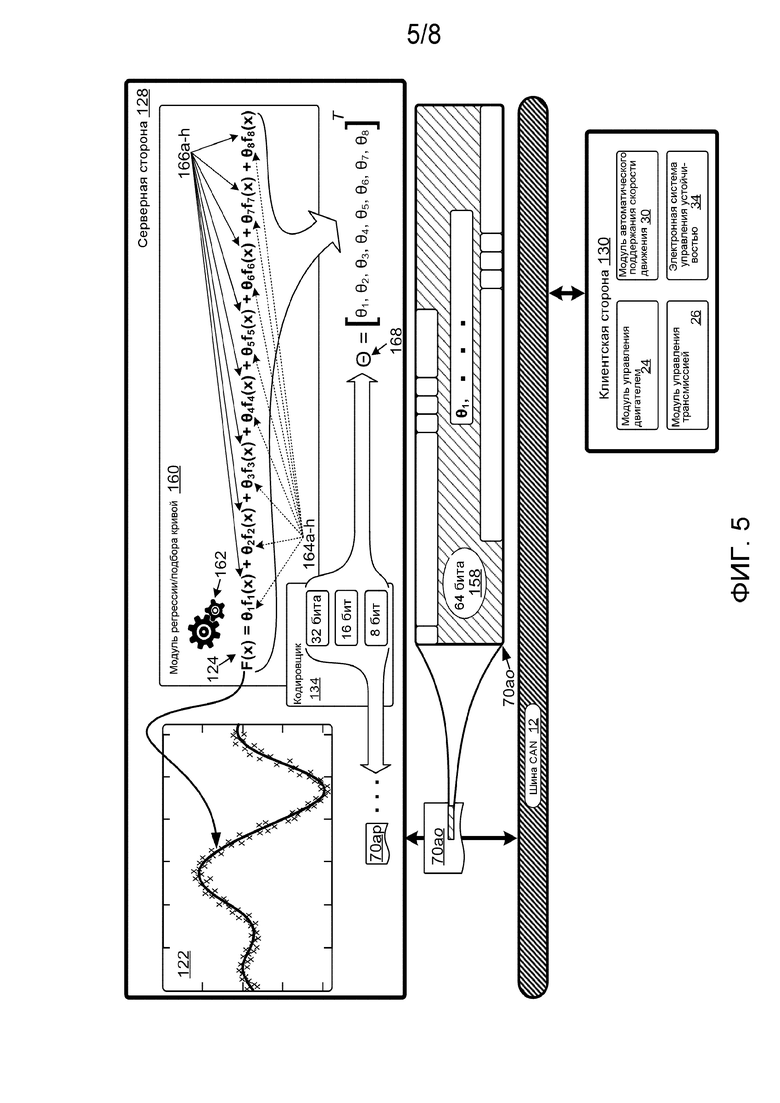
фиг. 5 изображает аппроксимирующую функцию, демонстрирующую характеристику гладкости, происходящую из ограничения скорости изменения значений атрибута дороги, вместе с принципиальной структурной схемой инфраструктуры серверной стороны в транспортном средстве, которая сжимает данные предварительного представления посредством передачи ограниченного количества коэффициентов, допустимого гладкой аппроксимирующей функцией, сокращая количество сообщений, требуемых для доставки информации предварительного представления по шине транспортного средства на клиентскую сторону, где они могут использоваться ECU, в соответствии с примерами;
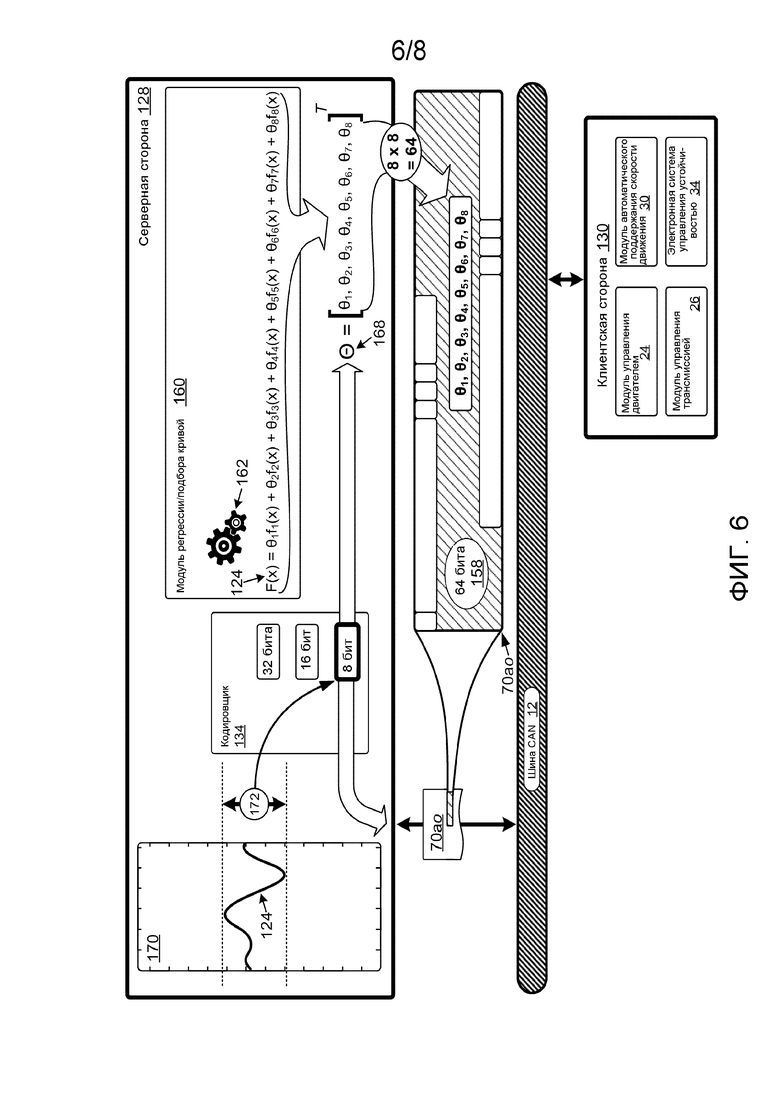
фиг. 6 изображает аппроксимирующую функцию, демонстрирующую характеристику ограничения возможных амплитудных значений вместе с принципиальной структурной схемой инфраструктуры серверной стороны внутри транспортного средства, которая сжимает информацию предварительного представления ограниченным количеством битов, требуемым для обеспечения достаточного разрешения для ограниченного диапазона амплитуд, сокращая количество сообщений, требуемых для передачи информации предварительного представления по шине транспортного средства на клиентскую сторону, где она может использоваться ECU, в соответствии с примерами;
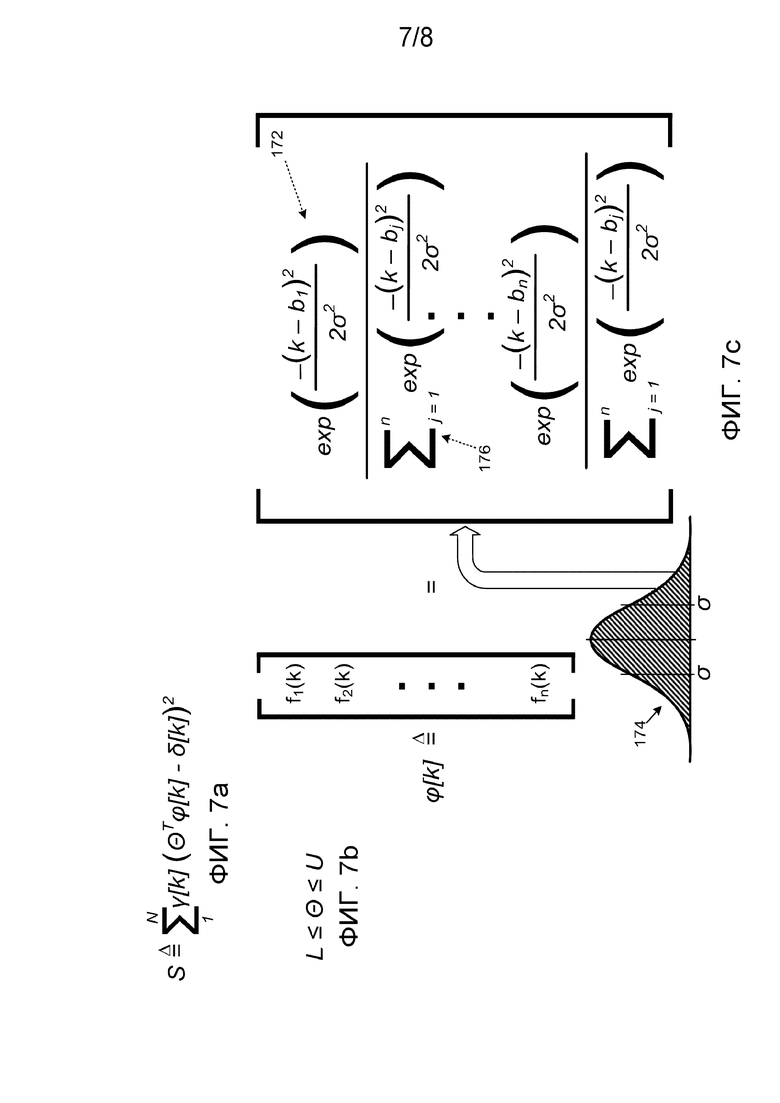
фиг. 7a - пример уравнения, используемого для подбора кривой, аппроксимации и/или оптимизации аппроксимирующей функции для данных предварительного представления, например, посредством подхода обычных наименьших квадратов (OLS), в соответствии с примерами;
фиг. 7b - условие неравенства, которое может быть наложено на набор коэффициентов вследствие ограничений, навязанных соображениями, предписанными принципами проектирования дорог, в соответствии с примерами;
фиг. 7c определяет матрицу n x 1 гауссовых функций, таких как могущие служить в качестве базисных или ядерных функций для формирования аппроксимирующей или регрессионной функции, в соответствии с примерами; и
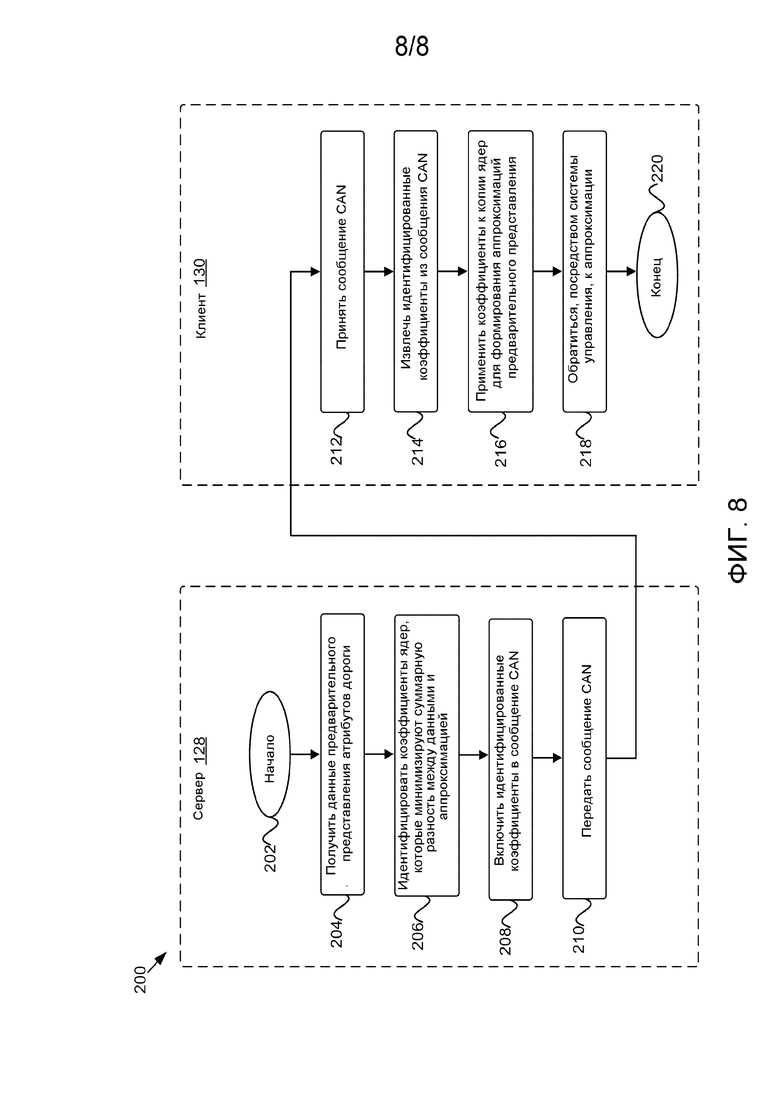
фиг. 8 - блок-схема последовательности операций способа по этапам для сжатия, передачи и оценки данных предварительного представления о будущих значениях атрибута дороги, используемых ECU в транспортном средстве, в соответствии с примерами.
ПОДРОБНОЕ ОПИСАНИЕ
Будет без труда понятно, что компоненты настоящего изобретения, которые в общих чертах описаны и проиллюстрированы на фигурах в материалах настоящей заявки, могут быть организованы и сконструированы в широком многообразии разных конфигураций. Таким образом, нижеследующее более подробное описание, как представленное на фигурах, не подразумевается ограничивающим в пределах объема, который заявлен формулой изобретения, но всего лишь является представляющим некоторые примеры. Описанные в настоящее время примеры будут лучше всего понятны посредством обращения к чертежам, на которых одинаковые части обозначены идентичными номерами на всем протяжении.
Со ссылкой на фиг. 1, изображены очертания транспортного средства 10. В сценарии, изображенном на фиг. 1, транспортное средство 10 является дорожным транспортным средством, автомашиной и/или автомобилем, обозреваемым снизу. Однако, другие типы транспортных средств совместимы с доктринами, приведенными в материалах настоящей заявки. Фигура также отображает шину 12 транспортного средства, которая может реализовывать любое количество протоколов, таких как: шина Локальной сети контроллеров (CAN); шина Сети локальных соединений (LIN); Byteflight; Бытовая цифровая шина (D2B); FlexRay; шина Постоянного тока (DC); Шина данных интеллектуальной транспортной системы (IDB)-1394; Шина между оборудованием (IEBus); Шина обмена между интегральными схемами (I²C); Международной организации по стандартизации (ISO) 9141-1/-2; Общества инженеров автомобильной и авиационной промышленности (SAE) J1708; SAE J1587; SAE J1850; SAE J1939; ISO 11783; Протокол ключевых слов 2000 (KWP2000); Транспортировки данных мультимедийных систем (MOST); Международной электротехнической комиссии (IEC) 61375; SMARTwireX; Последовательного интерфейса периферийных устройств (SPI); Локальной сети транспортного средства (VAN); и/или тому подобные.
Шина 12 транспортного средства может давать возможность реализации электрических систем управления в транспортном средстве 10, обеспечивая средство связи между многочисленными элементами в транспортном средстве 10, включенными в такие электрические системы управления. Примеры общих категорий таких элементов могут включать в себя датчики, исполнительные механизмы, интерфейсы, базы данных и/или электронные блоки управления (ECU). В качестве используемого в материалах настоящей заявки, термин ECU используется, чтобы в целом указывать ссылкой на любое количество разных встроенных систем, микроконтроллеров и/или вычислительных систем, которые могут управлять электрическими системами внутри транспортного средства 10, конкретные примеры которых подробнее обсуждаются ниже.
В дополнение к шине 12 транспортного средства, изображены различные элементы силовой передачи транспортного средства. Такие элементы силовой передачи включают в себя двигатель 14 и трансмиссию 16. Дополнительно, изображены элементы тормозной системы. Например, изображены четыре комплекта дисковых тормозов 18 вместе с гидравлическими линиями 20 и главным цилиндром 22. Подмножество электронных систем управления для транспортного средства 10, которые могут снимать показания с и/или взаимодействовать с силовой передачей и/или тормозной системой, могут характеризоваться как системы продольного управления.
Различные примеры ECU, которые могут относиться к системам продольного управления, и которые могут полагаться на шину 12 транспортного средства для поддержания связи друг с другом, принимают данные и/или отправляют команды на исполнительные механизмы. Такие ECU могут включать в себя (в качестве примера, а не ограничения, электронный модуль 24 управления двигателем (ECM), модуль 26 управления трансмиссией (TCM) 26, модуль управления силовой передачей (PCM) - который может объединять ECM 24 и TCM 26, модуль 28 управления тормозами (BCM) и/или модуль 30 автоматического поддержания скорости движения (CCM). Такие ECU могут получать данные по шине 12 транспортного средства из многообразия датчиков, баз данных и/или интерфейсов. В некоторых примерах, некоторые из таких датчиков, баз данных и/или интерфейсов могут быть присоединены непосредственно к одному или более ECU, которые, в свою очередь, передают данные в один или более дополнительных ECU по шине 12 транспортного средства. Дополнительно, многообразие исполнительных механизмов, таких как изображенный исполнительный механизм 32 трансмиссии, предоставляющий средство для переключения передач в ответ на решение ECU, может принимать команды по шине 12 транспортного средства, непосредственно или через принимающий ECU.
Такие ECU в системе продольного управления могли бы выгодно использовать данные, предварительно представляющие будущие значения для одного или более атрибутов дороги у дороги, проезжаемой транспортным средством 10, многими разными способами. Например, и без ограничения, ECU в системах продольного управления могли бы использовать данные, сообщающие о характеристиках дороги, маршруте и/или пути впереди, для оптимизации расхода топлива и/или улучшения плавности езды, как подробнее обсуждено ниже. В качестве еще одного неограничивающего примера, подмножество электронных систем управления для транспортного средства 10, которые могут быть категоризированы как системы поперечного управления транспортным средством, также могут выгодно применять данные предварительного представления маршрута.
ECU, изображенные на фиг. 1, которые могут быть включены в системы поперечного управления транспортным средством, включают в себя электронную систему 34 управления устойчивостью (ESC), в качестве альтернативы указываемое ссылкой как электронная система контроля устойчивости (ESP) или электронная система динамической стабилизации (DSC). Дополнительный неограничивающий пример может включать в себя модуль 36 рулевого управления с усилителем (PSCM) и BCM 28. Неограничивающие примеры датчиков, которые могут выдавать данные в системы поперечного управления, могут включать в себя датчик 38 угла поворота управляемых колес, датчик 40 угла рыскания, датчик 42 поперечного ускорения и набор датчиков 44 тормоза. Дисковые тормоза 18 и/или главный цилиндр 22 могут предоставлять примеры исполнительных механизмов.
Для обеспечения возможных выгод, ECU в электронных системах продольного, поперечного управления или других электронных системах управления сначала должны получать данные предварительного представления маршрута. В некоторых примерах, транспортное средство 10 может включать в себя бортовой модуль 46 сбора. Бортовой модуль 46 сбора может быть работоспособным для сбора и хранения данных предварительного представления по мере того, как транспортное средство 10 движется в предыдущей поездке по дороге, проезжаемой на данный момент.
В некоторых примерах, транспортное средство 10 может включать в себя блок 48 телематического управления (TCU), или тому подобное. TCU 48 может включать в себя внешний интерфейс 50 для мобильной связи. В таких примерах, TCU 48 может использовать внешний интерфейс 50 для мобильной связи, чтобы осуществлять доступ к одной или более вычислительных систем 52, которые могут осуществлять доступ к одной или более баз 54 данных в облачной среде 56 и/или по сети Интернет. База(ы) 56 данных может поддерживать данные предварительного представления маршрута. В некоторых примерах, внешний интерфейс 50 может поддерживать связь с мобильным устройством 58, таким как мобильный телефон, для осуществления доступа к межсетевой/облачной вычислительной среде 56. В таких примерах, модуль связи, который может включать в себя TCU 48 и/или внешний интерфейс 50, может принимать данные предварительного представления из облачной вычислительной среды 56 через соединение сети Интернет и/или через мобильное устройство 58.
Кроме систем продольного и поперечного управления, ECU, уместные для разных типов электрических систем управления, также могут быть включены в транспортное средство 10. С целью предоставления некоторых ограничивающих примеров, фиг. 1 также изображает блок 60 управления кузовом (BCU), водительский интерфейсный модуль 62 (DIM) и блок 64 управления дверями (DCU). Многие другие типы ECU также могут быть включены в транспортное средство 10 вместе с другими типами датчиков, исполнительных механизмов и/или других устройств, которые могут поставлять данные для передачи по и/или полагаться на данные, принятые с шины 12 транспортного средства. Некоторые следствия касательно выдачи данных предварительного представления в соответствующие ECU из бортового модуля 46 сбора, TCU 48 и/или тому подобного по шине 12 транспортного средства, обсуждены в отношении следующей фигуры.
Со ссылкой на фиг. 2, изображена схема системы 66 передачи данных в транспортном средстве 10. Система 66 передачи данных может включать в себя одну или более шин 12a, 12b транспортного средства, таких как основная шина 12a транспортного средства и вспомогательная шина 12b транспортного средства, или любое количество разных шин 12 транспортного средства во многих разных комбинациях разных протоколов шин транспортного средства. В некоторых примерах, как основная шина 12a транспортного средства, так и вспомогательная шина 12b транспортного средства могут использовать один и тот же протокол, такой как шина CAN. В других примерах, основная шина 12a транспортного средства и вспомогательная шина 12b транспортного средства могут использовать разные протоколы. В качестве одного из неограничивающих примеров, основная шина 12a транспортного средства может быть шиной CAN, а вспомогательная шина 12b транспортного средства может быть шиной LIN.
Модуль 68 шлюза может быть присоединен как к основной шине 12a транспортного средства, так и к вспомогательной шине 12b транспортного средства. Модуль 68 шлюза может пересылать данные между шинами 12a, 12b транспортного средства. Пересылка данных между шинами 12a, 12b транспортного средства может включать в себя одну или более дополнительных услуг, таких как организация очереди данных, буферизация данных, увязывание данных с контекстом, фильтрация данных, предоставление услуг преобразования между протоколами, и/или тому подобное.
Одна или более шин 12 транспортного средства в системе 66 передачи данных могут реализовывать основанный на сообщениях, пакетах, кадрах, или тому подобном, протокол, в соответствии с которым данные переносятся в сообщениях/пакетах/кадрах 70a-70an. В дополнение к своим полезным нагрузкам, такие сообщения/пакеты/кадры 70a-70an могут включать в себя служебные сигналы или данные. Как обсуждено в отношении предыдущих фигур, широкое многообразие ECU, датчиков, исполнительных механизмов, интерфейсов и/или других устройств могут передавать и/или принимать сообщения/пакеты/кадры 70a-z через систему 66 передачи данных. Что касается основной шины 12a данных, неограничивающие примеры таких элементов могут включать в себя PCU 72, CCM 30, ECU 74 подушек безопасности, ESC 34, комбинированный блок с датчиками 76 угла рыскания и ускорения, PSCM 36 и датчик 38 угла поворота управляемых колес. Чтобы подчеркнуть широкий диапазон возможных ECU, датчиков, исполнительных механизмов, интерфейсов и/или устройств, ECM 24 и TCM 26 включены в PCU 72. Дополнительно, исполнительный механизм 32 трансмиссии включен в TCM 26, а BCM 28 включен в ESC 34. Дополнительно, ECU 74 подушек безопасности предоставляет дополнительный пример еще одного ECU, не обсужденного раньше. К тому же, датчик 40 угла рыскания и датчик 42 поперечного ускорения по предыдущей фигуре были объединены в общий блок 72 датчиков. Возможно любое количество разных типов элементов и/или комбинаций на вязи с системой 66 передачи данных.
Хотя несколько ECU, в том числе, модуль 78 управления кузовом (BCM), модуль 80 управления радиоприемником (RCM), человеко-машинный интерфейс 82 (HMI), модуль 80 управления дверями (DCM) и модуль 86 управления сиденьями (SCM), не присоединены непосредственно к основной шине 12a транспортного средства, сообщения/пакеты/кадры 70ad-70an данных, которые они поставляют на вспомогательную шину 12b транспортного средства, совместно используются по меньшей мере частично, с помощью модуля 68 шлюза, с основной шиной 12a транспортного средства, ровно как и сообщения/пакеты/кадры 70a-70-ac основной шины 12a транспортного средства могут совместно использоваться с вспомогательной шиной 12b транспортного средства с помощью модуля 68 шлюза. Хотя некоторые из датчиков, исполнительных механизмов и/или других устройств могут быть непосредственно присоединены к ECU в отличие от шины 12 транспортного средства, данные, вырабатываемые и/или запрашиваемые этими датчиками, исполнительными механизмами и/или другими устройствами, по-прежнему будут доставляться на и/или извлекаться с шин 12a, 12b транспортного средства посредством ECU, к которым они относятся.
ECM 24 в PCU 72 является иллюстративным. В качестве примера, а не ограничения, ECM 24 может включать в себя датчик 88 дросселя, датчик 90 расхода воздуха, датчик 92 давления топлива, датчик 94 скорости, датчик 96 детонации, датчик 98 температуры, первый датчик 100 кислорода, второй датчик 102 кислорода, исполнительный механизм 104 впрыска топлива, элемент 106 управления зажиганием, привод 108 дроссельной заслонки и/или пневмопривод 110 холостого хода в числе других возможных элементов. Как может быть принято во внимание, количество элементов, выдающих и/или запрашивающих сообщения/пакеты/кадры 70a-70an, может устанавливать большую нагрузку на систему 66 передачи данных.
Когда шина 12 транспортного средства работает на полную мощность, шина 12 транспортного средства может быть узким 112 местом для электрических систем управления в транспортном средстве 10. Некоторым сообщениям 70 может назначаться приоритет над другими сообщениями 70. Например, сообщениям 70 из ECU 74 подушек безопасности и BCM 28 может назначаться приоритет в таких ситуациях, приводя к задержкам, которые могут компрометировать или устранять полезность сообщений 70, относящихся к другим электрическим системам. Хотя только сорок сообщений 70 изображены на фиг. 2, во время эксплуатации транспортного средства шина 12 транспортного средства типично может переносить тысячи сообщений 70 в каждый отдельно взятый момент времени, означая, что основные шины 12a транспортного средства часто работают на полной или почти полной своей пропускной способности, например, установленной в диапазоне от 500 кбит/с до 1 Мбит/с.
Также изображены бортовой модуль 46 сбора и TCU 48, которые имеют доступ к данным 114 предварительного представления маршрута. Данные 114 предварительного представления маршрута могут давать будущие значения для атрибутов дороги, таких как, в качестве примера, а не ограничения, уклон дороги и кривизна дороги, как указано символами уклона и кривизны на фиг. 2. Дополнительные неограничивающие примеры могут включать в себя угол поперечного наклона, высоту над уровнем моря и/или профиль скорости среди прочего. Чтобы выгодно применяться электрическими системами управления в транспортном средстве 10, данные 114 предварительного представления маршрута, как обсуждено выше, могут поставляться в сообщениях/пакетах/кадрах 70 по шине 12 транспортного средства в ECU, такие как, без ограничения, ECM 24, TCM 26, CCM 30 и/или ESC 34.
Однако, ограничения, накладываемые шиной 12 транспортного средства, как обсуждено, представляют собой соображения, меры в ответ на которые должны приниматься реализациями, которые использовали бы с выгодой информацию в данных 114 предварительного представления маршрута, чтобы вносить улучшения в операции транспортного средства через одну или более электрических систем управления. Как обсуждено ниже, данные 114 предварительного представления маршрута могут быть многочисленными и/или влечь за собой периодические обновления, требующие, чтобы многие сообщения 70 переносились уже чрезмерно нагруженной шиной 12 транспортного средства. Для преодоления этих трудностей, характеристики данных 114 предварительного представления маршрута могут раскрываться и использоваться с выгодой при разработке подхода к сжатию данных 114 предварительного представления маршрута для доставки по шине 12 транспортного средства, как дополнительно обсуждено в отношении следующей фигуры.
Со ссылкой на фиг. 3, изображен отрезок дороги 116 1,2 километра, тянущийся перед едущим по дороге транспортным средством 10. Дорога 116 идет по краю холмистой или гористой местности, давая флуктуирующие значения дороги для конкретного атрибута дороги, а именно, уклона 118, как указано символом для уклона. Холмистая или гористая местность также дает в результате флуктуирующие значения для атрибута или кривизны и, возможно, угла поперечного наклона конкретной дороги. Однако, ради простоты, фиг. 3 фокусируется исключительно на атрибуте уклона 118 дороги.
Измерения или точки 120a-120cv данных будущих значений уклона 118, которые встретятся автомобилю 10 по мере того, как он едет по дороге, могут приниматься и индексироваться показателем для продвижения транспортного средства по дороге 116. В качестве примера, а не ограничения, примерные показатели могут включать в себя дискретные точки во времени или пространстве. Например, и без ограничения, показатель индексирования может включать в себя дискретные точки, определенные в показателях расстояний относительно транспортного средства 10 и/или относительно других дискретных точек, которые могут быть разнесены равномерно и/или разнесены неравномерно. В качестве еще одного неограничивающего примера, показатель индексирования может включать в себя дискретные точки во времени, такие как время относительно движущегося транспортного средства 10, через которое транспортное средство 10 встретится с конкретным значением 120 для уклона 118, если оно продолжает движение на данной скорости.
Что касается неограничивающего примера, изображенного на фиг. 3, участок дороги 116 был разделен на сто измерений или точек 120a-120cv данных, которые индексированы равноразнесенными расстояниями в двенадцать метров как относительно транспортного средства 10, так и относительно друг друга. На фиг. 3, несколько этих измерений/точек 120 данных обозначены обведенными кружком номерами, показывающими номер индекса, указываемыми пунктирными стрелками, возникающими из мест вдоль дороги 116, к которым они относятся. Возможно любое количество разных подходов к индексации измерений/точек 120 данных будущим продвижением транспортного средства по дороге 116.
Данные 114 предварительного представления маршрута с измерениями/точками 120a-120cv данных для атрибута градиента 118 дороги могут использоваться, в числе других возможных применений, системами продольного управления для обеспечения многочисленных полезных услуг. С целью предоставления неограничивающих примеров, такие данные 114 могли бы использоваться для оптимизации расхода топлива и/или улучшения плавности езды. Например, и без ограничения, такие данные могли бы использоваться TCM 26 и исполнительным механизмом 32 трансмиссии для предсказывающего переключения для автоматической трансмиссии 16. В качестве еще одного неограничивающего примера, такие данные 114 могли бы использоваться CCM 30 для уменьшения неравномерности крутящего момента. Подобным образом, данные 114 предварительного представления, которые включают в себя информацию о кривизне дороги, изображенной на фиг. 3, могли бы использоваться для благоприятного воздействия системами поперечного управления.
Диаграмма 122 разброса данных также изображена на фиг. 3. На графике 122 графически нанесены будущие значения ста измерений/точек 120a-120cv данных, каждая представлена посредством 'X', что касается расстояний относительно транспортного средства 10, которыми они индексированы. Более того, на график 122 наложена сплошная линия 124, аппроксимирующая измерения/точки 120a-120cv данных в качестве графически нанесенных относительно расстояния. Эта сплошная линия 124 может быть описана функцией, такой как, без ограничения, аппроксимирующая функция и/или регрессионная функция. Для такой функции 124, расстояния относительно транспортного средства 10 или некоторый другой показатель продвижения транспортного средства 10 могут рассматриваться в качестве относящихся к независимой переменной, а будущие значения для измерений 120a-120cv в качестве зависимой переменной.
Далее может быть доведена пара моментов о характеристиках данных 114, сообщающих о будущих значениях разных атрибутов дороги. Во-первых, что касается атрибута уклона 118 дороги, дорога 116, изображенная на фиг. 3, служит примером принципов проектирования дорог, которые применимы к нескольким другим атрибутам дороги. Хотя дорога 116 проходит местность, которая является сильно холмистой от одной точки до другой, проектирование дороги старается изо всех сил минимизировать изменения уклона 118. Вместо прохождения из одной точки в другую по прямой линии, дорога 116 описывает обходной маршрут, чтобы оставаться в пределах относительно небольшого диапазона значений градиента, проходя по наружной кромке холмов, несмотря на протяженность, добавленную к поездке, и пониженные скорости, навязанные извилистой дорогой 116. Более того, просеки 126a, 126b также сделаны через окружающие холмы для избежания резких изменений уклона.
Многообразие соображений проектирования для дороги 116, таких как способность преодолевать подъемы широкого диапазона транспортных средств, которые могут пользоваться дорогой 116, физический износ на транспортных средствах, особенно у тормозных систем, значение, придаваемое плавной езде, среди прочего, накладывают ограничение на данные 114 предварительного представления маршрута, которые могут указываться ссылкой как данные 114, являющиеся ограниченными по скорости. Ограниченные по скорости данные могут пониматься в показателях будущих значений, имеющих ограничение по скорости изменения для измерений/точек 120a-120cv данных относительно расстояния, которое должно быть пройдено, или некоторого другого показателя продвижения. Другой способ выражения этого состоит в том, что частота измерений/точек 120 данных относительно продвижения транспортного средства может быть ограничена или в большей степени распределена по времени, тем временем, по прежнему захватывая значимые изменения у значения атрибута лежащей в основе дороги. Другие примеры атрибутов дороги также подвержены ограничению по скорости изменения, такие как, в качестве неограничивающего примера, кривизна дороги, которая ограничивается соображениями проектирования, которые служат мотивом избегания крутых поворотов. Другие соображения также делают ограниченными по скорости другие атрибуты дороги, такие как, без ограничения, угол поперечного наклона.
Одна из характеристик, к которая может быть призвана при сжатии данных 114 предварительного представления маршрута, состоит в том, что такие данные 114 предварительного представления будут часто ограничены по скорости. Ограничение по скорости изменения обнаруживается в наложении 124 сплошной линии данных 114 на графике 122. Как может быть принято во внимание, ограниченные по скорости данные приводят к более гладкой функции, чем функция, аппроксимирующая данные с большими скоростями изменения. Дополнительно, любая функция, используемая для аппроксимации таких данных, которая индексирована показателем продвижения транспортного средства, будет служить примером значительной степени гладкости. Степень гладкости и/или ограниченная скорость изменения для данных 114 предварительного представления могут быть устанавливаемыми из принципов проектирования дорог, соответствующих атрибуту дороги.
Вторая характеристика, которая часто может приписываться данным 114 предварительного представления маршрута в отношении различных атрибутов дороги, вместе с характеристикой ограничения по скорости или сама по себе, состоит в том, что такие данные 114 часто ограничены по амплитуде. Ограничение по амплитуде предусматривает границу для значений, которые могут быть выражены измерениями/точками 120 данных. Например, что касается уклона 118, уклон должен быть меньшим, чем прямо вверх или прямо вниз. Более того, практические соображения, такие как безопасность, способность транспортных средств преодолевать подъемы и/или физический износ транспортных средств, то есть, ограничения в поддержку принципов проектирования дорог, дополнительно ограничивают диапазон возможных амплитуд. Например, кандидаты на самую крутую городскую улицу в мире имеют уклоны приблизительно 35% или, когда выражены в градусах, 19°. Поэтому, амплитуды для уклона 118 могут быть ограничены между значениями 20 и -20. Однако, с более практической точки зрения, эти амплитуды могут быть ограничены дополнительно. Например, измерения 120a-120cv уклона варьируются между 1,4° и -2,2° на фиг. 3.
Другие аналогичные ограниченные диапазоны возможных амплитуд для данных 114 могут быть навязаны требованиями к дорогам по другим атрибутам дороги. Способы, которыми ограниченные по скорости и/или ограниченные по амплитуде данные могут использоваться с выгодой для сжатия данных предварительного представления, дополнительно обсуждены ниже. Здесь изложен краткий обзор некоторых из таких новшеств, не принимая во внимание некоторые аспекты и различные подробности для дополнительного обсуждения ниже.
Например, система для передачи данных в систему управления транспортного средства по шине 12 транспортного средства может включать в себя шину 12 транспортного средства, сервер или модуль серверной стороны и клиента или модуль клиентской стороны. Шина 12 транспортного средства может быть предусмотрена внутри транспортного средства 10 и может быть работоспособна для обеспечения основанной на сообщениях связи с набором систем управления для транспортного средства 10. В некоторых примерах, шина 12 транспортного средства может быть шиной 12 CAN. Модуль серверной стороны и/или модуль клиентской стороны могут быть встроены и/или добавлены в элементы в пределах электронных систем управления транспортного средства.
Сервер может быть работоспособным для получения данных 114 предварительного представления маршрута, индексированных значениями для продвижения транспортного средства. Регрессионный алгоритм может подбирать кривую функции 124, такой как, без ограничения, аппроксимирующая функция, регрессионная функция, линейная функция, и/или тому подобное 124, к данным 114, назначая значения набору коэффициентов, которые подгоняют кривую функции 124 к данным 114. Функция может быть составлена из набора коэффициентов, соответствующих набору подфункций, базисных функций, ядер, и/или тому подобному. Данные 114 могут предоставлять предстоящие значения для конкретного атрибута дороги в отношении маршрута или дороги 116, по которой передвигается транспортное средство 10.
Таким образом, сервер может формировать набор коэффициентов. Отдельные коэффициенты в наборе коэффициентов могут быть назначены подфункциям, комбинированным в аппроксимирующей функции 124, характеризующей отклонение данных 114 предварительного представления маршрута относительно индексированных значений. В качестве примера, а не ограничения, в некоторых примерах, модуль регрессии, с возможностью связи присоединенный к модулю серверной стороны, может быть работоспособным для применения алгоритма минимальных наименьших квадратов (MLS) к данным 114 предварительного представления маршрута и аппроксимациям, выведенным из набора коэффициентов и подфункций.
Модуль серверной стороны может передавать коэффициенты, передавая сообщения по шине 12 транспортного средства, в качестве неограничивающего примера, такие как в сообщении CAN по шине 12 CAN, клиенту или в модуль клиентской стороны. Клиент, который может включать в себя процессор и память, также может быть присоединен с возможностью связи к шине 12 транспортного средства и может быть работоспособным для приема сообщений с шины 12 транспортного средства. Клиент также может извлекать набор коэффициентов из сообщений, к примеру, из сообщения CAN, и хранить копию набора подфункций/базисных функций/ядер.
Клиент может оценивать аппроксимирующую/регрессионную/линейную функцию, и/или тому подобное, в модуле клиентской стороны посредством применения набора коэффициентов к копии подфункций, поддерживаемых в модуле клиентской стороны. Например, клиент может оценивать набор коэффициентов в качестве применяемых к набору базисных функций в ожидаемых точках по отношению к дороге 116. Клиентская система затем может использовать и/или предоставлять оценку аппроксимирующей функции для выдачи указаний системе управления.
В некоторых примерах, будущие значения в данных 114 предварительного представления маршрута, как обсуждено, могут иметь ограничения по скорости изменения относительно индексированных значений. Ограничение может определяться соображениями проектирования для дороги 116. Более того, ограничение может предоставлять аппроксимирующей функции 124 возможность аппроксимировать данные 114 предварительного представления маршрута более гладкой функцией 124, чем функция, аппроксимирующая данные с большими скоростями изменения.
Модуль подбора кривой, с возможностью связи присоединенный непосредственно к серверу, может быть работоспособным для определения значений для некоторого количества коэффициентов, используемых в аппроксимирующей функции 124. В таких примерах, модуль серверной стороны дополнительно может быть работоспособным для ограничения количества коэффициентов в наборе коэффициентов количеством коэффициентов для аппроксимации данных 124 предварительного представления маршрута. Ограничение по количеству коэффициентов может быть совместимым с ограничением по скорости изменения и результирующей степенью гладкости, которую это ограничение устанавливает на функции 124, аппроксимирующей или подбирающей кривую по данным 114, ограниченным таким образом, в пределах специфичного использованию диапазона точности. Другими словами, количество коэффициентов может быть ограничено, чтобы быть соразмерным сглаживанию линейной функции 124, предписанному ограничением по скорости изменения в данных 114, навязанным дорожными стандартами для атрибута дороги.
Ограничение по амплитуде, которое может накладываться на данные 114 предварительного представления, может предоставлять еще одно средство для сжатия данных 114 предварительного представления для передачи по шине 10 транспортного средства. Как обсуждено выше, данные 114 предварительного представления маршрута могут сообщать будущие значения для атрибута дороги у дороги 116, проезжаемой транспортным средством 10, которые имеют ограничение по амплитуде, предусматривающее границу для значений, которые могут быть выражены будущими значениями. Следовательно, будущие значения могут находиться в пределах диапазона возможных значений.
В таких примерах, модуль кодирования может быть работоспособным для кодирования будущих значений некоторым количеством битов. Модуль кодирования дополнительно может быть работоспособен для ограничения количества битов количеством, достаточным для предоставления коэффициентов с градацией, достаточной для формирования аппроксимирующей функции 124, допускающей будущие значения на краях диапазона возможных значений, тем временем, удовлетворяя специфичное использованию разрешение. Например, модуль кодировщика, присоединенный с возможностью связи непосредственно к серверу, может быть работоспособным для ограничения одного или более количеств битов, используемых для кодирования по меньшей мере одного коэффициента в наборе коэффициентов для включения в сообщение CAN. Одно или более количеств могут быть соразмерными разрешению, приспособленному к системе управления для ограниченного диапазона возможных амплитуд для данных 114, предписанного требованием к дороге относительно атрибута дороги.
Как изложено, оба, сервер и клиент, могут иметь доступ к копии подфункций, базисных функций, ядер, и/или тому подобного 124. В некоторых примерах, модуль подбора кривой дополнительно может быть работоспособным для определения значений для набора коэффициентов, в то время как применяются к набору гауссовых функций, служащих в качестве набора базисных функций 124. Эти гауссовы функции могут давать в результате функцию 124, вполне подходящую под ограничение по скорости изменения и ограниченный диапазон возможных амплитуд для данных. В таких примерах, модуль клиентской стороны может воспроизводить аппроксимирующую функцию 124 в модуле клиентской стороны, умножая копии отдельных гауссовых функций на отдельные коэффициенты из набора коэффициентов.
Со ссылкой на фиг. 4, серверная сторона 128, которая может быть сервером или модулем серверной стороны, и клиентская сторона 130, которая может быть клиентом или модулем клиентской стороны, изображены в отношении шины 12 транспортного средства. Как изложено выше, серверная сторона 128 может быть встроена в, добавлена в и/или охватывать часть электрической системы управления транспортного средства 10. Серверная сторона 128 может включать в себя и/или быть непосредственно соединенной с бортовым модулем 46 сбора и/или модулем 132 связи. В некоторых примерах, поэтому, серверная сторона 128 может быть работоспособна для осуществления доступа к данным 114 предварительного представления маршрута непосредственно из бортового модуля 46 сбора, а не по шине 12 транспортного средства.
В некоторых примерах, модуль 132 связи, который, без ограничения, может включать в себя TCU 48 и/или внешний интерфейс 50, может быть присоединен непосредственно к серверу 128. В таких примерах, сервер 128 может получать данные 114 предварительного представления маршрута или по меньшей мере их часть непосредственно из модуля 132 связи. Модуль 132 связи может быть работоспособным для приема данных 114 из облачной вычислительной среды 56, соединения сети Интернет и/или мобильного устройства 58, к примеру, без ограничения, из картографического приложения.
Серверная сторона 128 может включать в себя кодировщик 134, работоспособный для форматирования сообщений/пакетов/кадров 70ao-70cl, чтобы переносить данные 114 предварительного представления по шине 12 транспортного средства. Общепринятым количеством битов, используемых для кодирования числа, является 32, совместимое с 32-битными архитектурами, обычными среди микроконтроллеров, используемых в связи с шинами 12 транспортного средства. Использование 32 битов для кодирования всех ста сообщений/точек 120a-120cv данных по примеру на фиг. 3, однако, требует передачи по меньшей мере 3200 битов по шине 12 транспортного средства, чтобы передавать данные 114 предварительного представления для одиночного атрибута дороги среди многих возможных атрибутов дороги. В некоторых примерах, может быть необходимо передаваться более чем ста измерениям/точкам 120 данных.
В дополнение к кодированным данным, служебные сигналы или данные обмена сообщениями дают дополнительное соображение. Предполагаются сообщения 70, определенные для других протоколов шины транспортного средства. Сообщение 70 CAN определено, чтобы включать в себя по меньшей мере: бит 136 начала кадра; одиннадцать битов 138 идентификатора; бит 140 запроса удаленной передачи; бит 142 расширения идентификатора; резервный бит 144; четыре бита 146 кода длины данных; пятнадцать битов 148 контроля циклическим избыточным кодом; бит 150 разделителя контроля циклическим избыточным кодом; бит 152 сегмента подтверждения приема; бит 154 разделителя подтверждения приема; и семь битов 156 конца кадра, что касается дополнительных пятидесяти одного бита служебных сигналов или данных для каждого сообщения 70. Сообщения 70 шины CAN также могут приходить в расширенном формате, который включает в себя семьдесят один бит служебных сигналов или данных для каждого сообщения 70.
Каждое сообщение 70 шины CAN, нормальный формат или расширенный формат, предусматривает 64 бита служебных сигналов или данных 158. Одиночное сообщение 70 шины CAN, поэтому, может кодировать два измерения/точки 120a, 120b данных, каждое в 32 битах. Кодирование ста измерений/точек 120a-120cv данных, поэтому, приводит к пятидесяти сообщениям 70ao-70ce, означая, что от 5,75 до 6,75 килобайт, в зависимости от формата, добавлялись бы на шину 12 транспортного средства для передачи одиночного блока данных 114 предварительного представления для одного атрибута дороги. Более того, разделение таких данных между пятидесятью сообщениями 70ao-70ce дает в результате пятьдесят возможностей задерживать передачу данных 114 предварительного представления, экспоненциально повышая вероятность, что задержка уменьшит или устранит полезность данных 114 предварительного представления.
Как только данные 114 предварительного представления были переданы по шине 12 транспортного средства, они могут использоваться на клиентской стороне 130. Как и с серверной стороной 128, клиентская сторона 130 может быть встроена в, добавлена в и/или охватывать часть электрической системы управления транспортного средства 10. Следовательно, клиентская сторона 130 может быть непосредственно присоединена к элементам электронной системы управления, способным выгодно применять данные 114 предварительного представления, таким как, без ограничения, ECM 24, TCM 26, CCM 30 и/или ESC 34. Непосредственное соединение между серверной стороной 128 и данными 114 предварительного представления с одной стороны и клиентской стороной 130 и одной или более электронных систем, способных выгодно применять данные 114 предварительного представления, с другой стороны может использоваться для сжатия данных 114 предварительного представления для передачи по шине 12 транспортного средства, как дополнительно рассмотрено в отношении следующей фигуры.
Со ссылкой на фиг. 5, изображен модуль 160 регрессии/подбора кривой. Модуль 160 регрессии/подбора кривой может находиться в пределах серверной стороны 128 и/или быть присоединенным с возможностью связи к серверной стороне 128. Модуль 160 регрессии/подбора кривой может быть работоспособен для применения алгоритма для подбора кривой по данным и/или регрессионного анализа 162, чтобы подгонять кривую аппроксимирующей/регрессионной функции 124 к данным 114 предварительного представления, как изображено графиком 122 в верхнем левом углу. В некоторых примерах, модуль 160 регрессии/подбора кривой может подбирать кривую функции 124 к данным 114, изменяя значения для многочисленных коэффициентов 164a-h. В таких примерах, отдельные коэффициенты 164a-h комбинируются с подфункциями/базисными функциями/ядрами, и/или тому подобным 166a-h. Как только кривая аппроксимирующей/регрессионной функции 124 подобрана к данным 114 предварительного представления, значения для коэффициентов 164a-h могут быть включены в набор коэффициентов 168. В некоторых примерах, функция 124 может быть линейной при коэффициентах 164. В других примерах, коэффициенты 164 могут быть замещены константами, применяемыми в любом количестве разных математических операций и/или возможностей.
Как может быть принято во внимание, большая часть конструкции и функциональных возможностей, обсужденных в отношении элементов, раскрытых в материалах настоящей заявки, может быть предусмотрена модулями. Модули могут принимать форму полностью аппаратного варианта осуществления, полностью программного варианта осуществления (включающего в себя микропрограммное обеспечение, резидентное программное обеспечение, микрокод, и т. д.) или варианта осуществления, сочетающего аспекты программного обеспечения и аппаратных средств. Более того, аспекты обсуждаемого в настоящее время объекта изобретения могут принимать форму компьютерного программного продукта, воплощенного в любом материальном носителе представления, содержащем используемую компьютером управляющую программу.
Что касается аспектов программного обеспечения, может использоваться любая комбинация одного или более используемых компьютером или машинно-читаемых носителей. Например, машинно-читаемый носитель может включать в себя одно или более из съемной компьютерной дискеты, жесткого диска, оперативного запоминающего устройства (ОЗУ, RAM), постоянного запоминающего устройства (ПЗУ, ROM), стираемого программируемого постоянного запоминающего устройства (СППЗУ, EPROM или флэш-памяти), съемного постоянного запоминающего устройства на компакт-диске (CDROM), оптического запоминающего устройства и магнитного запоминающего устройства. В выбранных вариантах осуществления, машинно-читаемый носитель может содержать любой постоянный носитель, который может удерживать, хранить, передавать, распространять или переносить программу для использования посредством или в связи с системой, прибором или устройством для выполнения команд.
Компьютерная управляющая программа для выполнения операций по настоящему изобретению может быть написана на любой комбинации одного или более языков программирования, в том числе, объектно-ориентированном языке программирования, таком как C++, и традиционных процедурных языках программирования, таких как язык программирования «C», или подобных языках программирования. Аспекты модуля, которые реализованы программным обеспечением, могут выполняться на микропроцессоре, центральном процессорном устройстве (ЦПУ, CPU), и/или тому подобном. Любые аспекты аппаратных средств модуля могут быть реализованы, чтобы взаимодействовать с аспектами программного обеспечения.
Возвращаясь к функциональным возможностям модуля 160 регрессии/подбора кривой, любое количество разных типов функций может использоваться для подфункций/базисных функций/ядер 166. В некоторых примерах, все из функций могут иметь одинаковый тип. В других примерах, могут комбинироваться разные типы подфункций/базисных функций/ядер 166. В качестве неограничивающих примеров, такие подфункции/базисные функции/ядра 166 могут включать в себя полиномиальные, синусные функции, косинусные функции, функции, включенные в ряды Фурье, и/или любое количество разных типов элементарных функций, вместе с дополнительными возможностями, некоторые из которых дополнительно обсуждаются ниже.
Так как данные 114 предварительного представления могут быть ограничены по скорости для некоторых типов атрибутов дороги, как обсуждено в отношении фиг. 3, определенные уровень и/или степень гладкости могут быть приписаны аппроксимирующей функции 124, так чтобы ограниченное количество коэффициентов 164 и подфункций/базисных функций/ядер 166 могло использоваться для подбора кривой регрессионной функции 124 под данные 114 с достаточной степенью точности, чтобы описывала данные 114 предварительного представления для одного или более применений одной или более систем управления. Если лежащие в основе данные не ограничены в виде ограничения по скорости, например, как имело бы место с белым шумом, или некоторым другим набором данных, который требовал бы в большей степени негладкой аппроксимирующей функции, количество коэффициентов 164 могло бы не ограничиваться таким образом или было бы гораздо большим.
Как может быть принято во внимание, количество коэффициентов 164, восемь в примере, изображенном на фиг. 5, является гораздо меньшим, чем количество измерений/точек 120 данных, сто в данном примере. В этом примере, количество коэффициентов 164 является более чем на порядок величины меньшим, чем количество измерений/точек 120 данных. Ограниченные по скорости данные 114 предварительного представления для атрибутов дороги, в качестве общего правила, могут требовать меньшего количества коэффициентов 164 для создания достаточно точной аппроксимирующей функции 124, чем количество аппроксимируемых измерений/точек 120 данных.
Посредством снабжения клиентской стороны 130 копией подфункций/базисных функций/ядер 166, которые могут поддерживаться или храниться на клиентской стороне 130, серверная сторона 128 может передавать информацию из данных 114 предварительного представления без вынуждения передавать данные предварительного представления. Серверная сторона 128 может просто передавать коэффициенты 168 на клиентскую сторону 130. На клиентской стороне 130, клиент 130 может извлекать информацию, оценивая коэффициенты 168 с копией подфункций/базисных функций/ядер 166, поддерживаемых в нем. Таким образом, серверная сторона 128 может сжимать данные 114 для передачи по шине 12 транспортного средства.
Хотя восемь коэффициентов 164a-h могут соответствовать восьми подфункциям/базисным функциям/ядрам, и/или тому подобному 166a-h, возможно любое количество коэффициентов 164 и/или подфункций/базисных функций/ядер 166. Действительно, в тех случаях, когда ограничение скорости может быть устанавливаемым из принципов проектирования дорог, дорожных стандартов и/или таких соображений, ограничение на количество коэффициентов 124 для данного набора функций/базисных функций/ядер 166 может определяться и накладываться и/или принудительно применяться сервером 128, модулем 160 регрессии/подбора кривой, модулем 134 кодировщика, и/или тому подобным.
Как только значения были определены для набора коэффициентов 168, сервер 128, модуль 134 кодировщика, и/или тому подобное, могут форматировать одно или более сообщений 70, кодировать коэффициенты 164 и/или включать коэффициенты 164 в полезные нагрузки 158 одного или более сообщений. Результирующее сообщение(я) 70 затем может доставляться по шине 12 транспортного средства клиенту 130. Как показано в кодировщике 134, разные количества битов могут использоваться для кодирования коэффициентов 124. Требуемое количество сообщений 70 может определяться количеством коэффициентов 164 и/или количеством битов, используемых для кодирования коэффициентов 164, которые могут быть общими для всех коэффициентов 164 и/или меняться от коэффициента 164 к коэффициенту 164. Характеристика ограничения по амплитуде, продемонстрированная данными 114 о многих разных типах атрибутов дороги, как обсуждено со ссылкой на фиг. 3, может использоваться в качестве дополнительного или альтернативного подхода к сжатию данных 114 предварительного представления, как дополнительно обсуждено в отношении следующей фигуры.
Со ссылкой на фиг. 6, аппроксимирующая/регрессионная функция 124 изображена на графике 170, показывающем относительно ограниченный диапазон 172 возможных амплитудных значений, которые могут быть выражены данными 114 предварительного представления. Такие ограничения по амплитудным значениям 172 обычны для широкого многообразия атрибутов дороги, как обсуждено в отношении фиг. 3. Действительно, ограничения по амплитудным значениям 172 могут быть выведены для различных атрибутов дороги из принципов проектирования дорог, практических соображений, дорожных стандартов, и/или тому подобного.
В тех случаях, когда ограничения по амплитудным значениям 172 могут быть установлены, количество битов, требуемых для создания требуемого разрешения или уровня уклона для конкретного использования, может устанавливаться для кодирования измерений/точек 120 данных. В тех случаях, когда ограничение по амплитудам 172 ограничивает значения узким диапазоном, как на фиг. 6, количество битов, требуемых для кодирования измерений данных/точек 120 данных для данного разрешения, может быть сокращено относительно количества битов для кодирования измерений данных/точек 120 данных для большого диапазона возможных значений. Поэтому, в некоторых примерах, определение ограничений по амплитудам 172 может использоваться для ограничения количества битов, требуемых для кодирования измерений данных/точек 120 данных, предоставляя данным 114 предварительного представления возможность быть сжатыми для передачи.
Эти принципы могут быть распространены на примеры, где первый способ сжатия данных применяется в показателях отправки коэффициентов 164 в отличие от измерений/точек 120 данных. Величина градации или разрешение в пределах коэффициентов 164, несмотря на то, что не является абсолютно равной разрешению между значениями на краях диапазона возможных значений для амплитуды, тем не менее, соотносится с этим разрешением. Отсюда, как только определено ограничение по амплитудным значениям 172, может накладываться ограничение по количеству битов, используемых для кодирования коэффициента 164. Такое ограничение может устанавливаться для предоставления коэффициентов 164 с градацией, достаточной для формирования аппроксимирующей функции 124, допускающей будущие значения на краях диапазона возможных значений, тем временем, удовлетворяя специфичному использованию разрешению.
В примере, изображенном на фиг. 6, относительно узкое ограничение 172 по амплитуде может использоваться для определения, что восьми битов достаточно для кодирования коэффициентов 164, сжимая информацию для передачи с коэффициентом четыре относительно сценария, использующего 32-битное кодирование. Кодировщик 134, поэтому, может ограничивать количество битов для кодирования коэффициента 164 восемью битами. Хотя возможные количества для кодирования информации изображены на фиг. 6 в качестве восьми битов, шестнадцати битов и тридцати двух битов, может использоваться любое количество битов. К тому же, в некоторых примерах, общее ограничение по количеству битов может принудительно применяться для кодирования всех коэффициентов 164. В других примерах, разные предельные количества для кодирующих битов могут принудительно применяться для разных коэффициентов 164.
В некоторых примерах, модуль 134 кодирования может быть работоспособным для ограничения количества битов, которое может использоваться для кодирования коэффициентов 164, так чтобы произведение количества битов и количества коэффициентов 164 равнялось объему, который может доставляться в рамках полезной нагрузки 158 заданного количества сообщений 70, такого как одиночное сообщение 70ao, определенных для шины 12 транспортного средства. В примере, изображенном на фиг. 6, количество коэффициентов 164 в наборе коэффициентов 168 ограничено восемью. Дополнительно, как изложено, количество кодирующих битов ограничено восемью. Отсюда, произведение количества коэффициентов, то есть, восьми, и количества кодирующих битов, то есть, восьми, имеет значение шестидесяти четырех, которое равно размеру полезной нагрузки 158 одиночного сообщения 70ao CAN.
Отсюда, посредством использования с выгодой как ограниченной по скорости, так и ограниченной по амплитуде природы данных 114 предварительного представления для многих разных типов атрибутов дороги, набор предварительного представления из ста измерений/точек 120 данных, который требовал бы пятидесяти сообщений 70ao-70cl CAN для передачи клиенту 130 по шине 12 CAN, может быть сжат до одиночного сообщения 70ao CAN. Такие подходы к сжатию не только сокращали бы объем данных, которые должны передаваться, но это сильно уменьшило бы возможность для задержки при доставке информации посредством размещения ее в одиночном сообщении 70ao CAN. На этой стадии, были рассмотрены некоторые подробности, имеющие отношение к использованию с выгодой характеристик данных 114 предварительного представления об атрибутах дороги, тем временем возможные подробности о подходах к подбору кривой по данным и/или регрессионному анализу в поддержку опоры на передачу набора коэффициентов 168 остаются для дополнительного рассмотрения с помощью нижеследующих фигур.
Со ссылкой на фиг. 7a, определено уравнение. Как обсуждено выше, характеристика данных 114 предварительного представления, которые ограничены по скорости, предоставляет возможность, чтобы меньшее количество коэффициентов 164, которые неизвестны, определялось в процессе подбора кривой аппроксимирующей функции 124 под данные 114 предварительного представления, чем количество измерений/точек 120 данных в данных предварительного представления. Результатом является переопределенная система. Как только система переопределена, подход обычных наименьших квадратов (OLS) или минимальных наименьших квадратов (MLS) может использоваться для аппроксимации или подбора кривой регрессионной функции под данные 114 предварительного представления с уникальным решением замкнутой формы.
Как может быть принято во внимание, любое количество разных технологий регрессии или подбора кривой могут применяться, чтобы определять значения для набора коэффициентов. Нижеследующее обсуждение предусмотрено просто с целью предоставления одного из неограничивающих примеров. Отсюда, уравнение, изложенное на фиг. 7a дает определение для функционала наименьших квадратов, то есть, уравнение в поддержку подхода OLS/MLS, которое количественно определяет разности между данными 114 и аппроксимирующей функцией 124. В уравнении 'S' представляет собой сумму возведенных в квадрат остатков в 'N' разных точках между значениями из набора данных 114 предварительного представления и аппроксимирующей функцией 124 по общим индексным значениям, 'k.' Значение 'N' равно количеству точек данных/измерений 120.
Набор данных 114 предварительного представления представлен посредством 'δ'. Набор данных 114 предварительного представления может периодически повторно оцениваться. Аппроксимирующая функция 124 изображена в виде произведения транспозиции матрицы набора 'Θ' коэффициентов 168 и матрицы подфункций/базисных функций/ядер 'ϕ'. Остатки являются разностями между данными 114 предварительного представления и аппроксимирующей функцией 124 с общими значениями 'k'. Значение 'k' отличается для каждой из 'N' точек данных/измерений 120, возможно являясь равным значению для показателя продвижения транспортного средства, которым индексированы соответствующие точки данных/измерения 120. Набор весов, обозначенных как 'γ', дополнительно обсужден ниже. Набор 'Θ' коэффициентов 168 может быть определен посредством минимизации значения 'S.' Однако, перед обсуждением определения набора коэффициентов, ниже обсуждено ограничение, которое может быть установлено для набора коэффициентов 168.
Со ссылкой на фиг. 7b, определено неравенство. Неравенство накладывает ограничение, которое может быть применено к набору коэффициентов 168, где лежащие в основе данные 114 подпадают под действие ограниченного диапазона возможных амплитуд 172. Как обсуждено выше, в тех случаях, когда диапазон значений для возможных амплитуд данных 114 предварительного представления может быть ограничен, возможные значения для коэффициентов 164 также могут быть ограничены. Отсюда, в неравенстве, набор 'L' предусматривает набор нижних границ, соответствующих отдельным коэффициентам 164 в наборе 'Θ' коэффициентов 168. Наоборот, набор 'U' предусматривает набор верхних границ, соответствующих отдельным коэффициентов 164 в наборе 'Θ' коэффициентов 168. В зависимости от примера, элементы в 'L' и/или 'U' все могут иметь одинаковое значение или разные значения.
Подходы к определению набора 'Θ' коэффициентов 168, который минимизирует значение 'S' для уравнения на фиг. 7a, широко обсуждены в литературе. На концептуальном уровне, нахождение решения для коэффициентов 164 эквивалентно взятию частных производных по таким коэффициентам 164. Литература по этой теме легко доступна грамотным специалистам в данной области техники. С целью предоставления одного из неограничивающих примеров, способ для решения задачи ограниченных наименьших квадратов, изложенной в уравнении и неравенстве по фиг. 7a и 7b, приведен в Lawson, Charles L and Hanson, Richard J, Solving least squares problems. Vol. 161. Englewood Cliffs, NJ: Prentice-Hall, 1974, который включен в материалы настоящей заявки посредством ссылки.
Со ссылкой на фиг. 7c, примерный набор линейных прогнозирующих функций, подфункций, базисных функций, ядер, и/или тому подобного 166, 'ϕ', определен и приравнен одному из возможных неограничивающих примеров. Набор 'ϕ', без ограничения, может составлять матрицу n x 1 с элементами, которые могут быть линейными прогнозирующими функциями, подфункциями, базисными функциями, ядрами, или тому подобным 166, которые должны использоваться при минимизации функционала наименьших квадратов, определенного на фиг. 7a. В некоторых примерах, совместимых с матрицей 'ϕ' n x 1, определенной на фиг. 7c, линейные прогнозирующие функции, подфункции, базисные функции, ядра, и/или тому подобное 166, могут быть составлены из набора гауссовых функций/ядер, 172, примерная оценка 174 такой гауссовой функции/ядра также изображается. Гауссовы функции/ядра, 172, могут быть особенно хорошо пригодны для служения в качестве линейных прогнозирующих функций, подфункций, базисных функций, ядер, и/или тому подобного 166, вследствие характерной степени гладкости, демонстрируемой гауссовыми ядрами/функциями 174, совместимой с гладкостью, навязанной ограниченной по скорости природой данных 114 предварительного представления для многих разных типов атрибутов дороги. Матрица 'ϕ' n x 1 может иметь размерность 'n' строк, где 'n' равно количеству коэффициентов 164 в наборе коэффициентов 168.
Что касается гауссовых функций/ядер 172, значения для 'b1-n' определяют центры ядер/функций. В качестве примера, а не ограничения, центры 'b1-n' ядер/функций могут быть расположены в 'n' равноразнесенных точках, причем, первая располагается в 0,1'N', а 'nая' располагается в 1,1'N', где N равно количеству элементов в данных 114 предварительного представления. К тому же, в качестве примера, а не ограничения, среднеквадратическое отклонение, 'σ', может быть выбрано в качестве 'N'/10. При оценивании гауссовых функций/ядер 172, разность между 'k' и 'b1-n' может умножаться на расстояние между отдельными измерениями/точками 120 данных в данных 114 предварительного представления, или 12 м в примере, изображенном на фиг. 3. Дополнительно, в некоторых примерах, различные гауссовы функции/ядра 172 для каждого 'k' могут быть нормализованы посредством деления каждой из гауссовых функций/ядер 172 в строке на сумму всех гауссовых функций/ядер, 176.
Как изложено в отношении функционала наименьших квадратов на фиг. 7a, набор весов, 'γ[k],' может быть применен к уравнению, используемому для определения набора коэффициентов 168 во время регрессионного анализа. Поскольку электронные системы управления могут быть в большей степени чувствительны к значениям для измерений 120, более близких к транспортному средству 10, в качестве примера, а не ограничения, набор весов, 'γ[k]', может устанавливать больший акцент на данных, более близких к транспортному средству 10, в пределах горизонта предварительного представления, предусмотренного данными 114 предварительного представления. В некоторых примерах, модуль 160 подбора кривой может быть работоспособным для придания большего веса данным, более близким по дороге относительно движения транспортного средства 10, при подборе кривой линейной функции 124 к данным.
Вышеизложенное обсуждение рассматривает использование линейных прогнозирующих функций, подфункций, базисных функций, ядер, и/или тому подобного 166, на серверной стороне 128 для идентификации набора коэффициентов 168 для передачи на клиентскую сторону 130. Клиентская сторона 130 также располагает копией линейных прогнозирующих функций, подфункций, базисных функций, ядер, и/или тому подобного 166, чтобы оценивать предварительные представления для одного или более атрибутов дороги с коэффициентами 168, которые она принимает. Эта последовательность операций обсуждена с помощью блок-схемы последовательности операций способа на следующей фигуре с точки зрения способа.
Блок-схема последовательности операций способа иллюстрирует архитектуру, функциональные возможности и/или работу возможных реализаций систем, способов и компьютерных программных продуктов согласно примерам. В этом отношении, каждая вершина блок-схемы на блок-схеме последовательности операций способа может представлять собой модуль, сегмент, порцию кода, которые содержат одну или более исполняемых команд для реализации заданной логической функции(ий). Также будет отмечено, что каждая вершина блок-схемы иллюстраций блок-схемы последовательности операций способа и комбинации вершин блок-схем в иллюстрациях блок-схемы последовательности операций способа могут быть реализованы основанными на аппаратных средствах специального назначения системами, которые выполняют заданные функции или действия, или комбинациями аппаратных средств специального назначения и машинных команд.
В тех случаях, когда вовлечены команды компьютерной программы, эти команды компьютерной программы могут выдаваться в процессор компьютера общего применения, компьютера специального назначения или другого программируемого устройства обработки данных, чтобы порождать автомат, так чтобы команды, которые выполняются посредством процессора компьютера или другого программируемого устройства обработки данных, создавали средство для реализации функций/действий, заданных в блок-схеме последовательности операций способа и/или вершине или вершинах блок-схемы. Эти команды компьютерной программы также могут храниться на машинно-читаемом носителе, который может управлять компьютером, чтобы функционировал конкретным образом, так чтобы команды, хранимые на машинно-читаемом носителе, создавали изделие, включающее в себя командное средство, которое реализует функцию/действие, заданные в блок-схеме последовательности операций способа и/или вершине или вершинах блок-схемы.
Также должно быть отмечено, что, в некоторых альтернативных реализациях, функции, отмеченные в вершинах блок-схемы, могут совершаться вне указанной очередности. В некоторых вариантах осуществления, две вершины блок-схемы, показанные подряд, фактически, могут выполняться по существу параллельно, или вершины блок-схемы иногда могут выполняться в обратном порядке, в зависимости от вовлеченных функциональных возможностей. В качестве альтернативы, некоторые этапы или функции могут быть опущены.
Со ссылкой на фиг. 8, изображен способ 200 для сжатия данных шины транспортного средства. Способ может начинаться 202 получением 204 данных 114 атрибутов дороги на серверной стороне 128. Сервер 128 может формировать коэффициенты 164, применяемые к ядрам 166, тем временем, подбирая кривую функции 124 к данным 114 будущих значений для атрибута дороги, индексированным будущим продвижением транспортного средства, посредством идентификации 126 коэффициентов 162, примененных к набору ядер 166 в аппроксимирующей функции 124, которые минимизируют суммарную разность между данными 114 предварительного представления и аппроксимирующей функцией 124. Сервер 128 может включать 208 идентифицированные коэффициенты 168 в сообщение 70 шины транспортного средства, такое как сообщение 70 CAN, и передавать 210 сообщение 70 шины транспортного средства с коэффициентами 168 по шине 12 транспортного средства в систему управления транспортного средства 10. К тому же, некоторые примеры также могут включать в себя ограничение произведения количества коэффициентов и количества битов значением, обеспечиваемым полезной нагрузкой 158 сообщения 70, доставляемого шиной 10 транспортного средства, и форматирование сообщения 70 для переноса кодированных коэффициентов 164 в систему управления по шине 12 транспортного средства.
Способ 200 может продолжаться на клиентской стороне 130, которая может принимать 212 сообщение 70 шины транспортного средства и извлекать 214 идентифицированные коэффициенты 168 из сообщения 70 шины транспортного средства. Клиент может оценивать, для системы управления, будущее значение атрибута дороги, применяя 216 коэффициенты 164 с шины 12 транспортного средства к копии ядер 166, чтобы формировать аппроксимации предварительного представления. Система управления может обращаться 218 к одной или более аппроксимаций в клиенте 130, и способ 200 может заканчиваться 220.
В некоторых примерах, способ 200 дополнительно может включать в себя ограничение количества коэффициентов 164 в наборе коэффициентов 168, соразмерное с сокращенным количеством коэффициентов, требуемых для подбора кривой регрессионной функции 124 к данным 114 предварительного представления с ограниченной скоростью изменения. Ограниченная скорость изменения может быть устанавливаемой из принципов проектирования дорог. Дополнительно или в альтернативном варианте, некоторые примеры дополнительно могут включать в себя кодирование коэффициентов 164 ограниченным количеством битов, соразмерным с ограниченным диапазоном возможных амплитуд 172 для значений в данных 114 предварительного представления, навязанным принципами проектирования дорог. В некоторых примерах, набор гауссовых функций 172 может использоваться сервером 128 и клиентом 130 в качестве ядер для побора кривой регрессионной функции 124, приспособленной под ограниченную скорость изменения и ограниченный диапазон возможных амплитуд 172 для данных 114 предварительного представления.
Настоящее изобретение может быть воплощено в других специальных формах, не отходя от своей сущности или неотъемлемых характеристик. Описанные примеры во всех отношениях должны рассматриваться только как иллюстративные, а не ограничивающие. Объем изобретения, поэтому, определен прилагаемой формулой изобретения, а не вышеизложенным описанием. Все изменения в пределах смысла и диапазона эквивалентности формулы изобретения, должны быть охвачены ее объемом.
Изобретение относится к транспортным средствам с электронными системами управления. Система для передачи данных в систему управления транспортного средства содержит шину транспортного средства, модуль серверной стороны для: сбора данных предварительного представления маршрута, выполнения регрессионного анализа над данными предварительного представления маршрута для формирования набора коэффициентов, назначенных подфункциям, передачи коэффициентов посредством сообщений по шине транспортного средства. Система также содержит модуль клиентской стороны для: приема сообщений с шины транспортного средства, извлечения набора коэффициентов из сообщений, оценки аппроксимирующей функции в модуле клиентской стороны посредством применения набора коэффициентов к копии подфункций, использования оценки аппроксимирующей функции для выдачи указаний системе управления. Способ для сжатия данных шины транспортного средства содержит этапы, формирования на сервере коэффициентов, применяемых к ядрам, передачи коэффициентов по шине транспортного средства в систему управления транспортного средства, оценивания будущего значения атрибута дороги. Достигается улучшенная передача данных в системе управления транспортного средства. 3 н. и 17 з.п. ф-лы, 8 ил.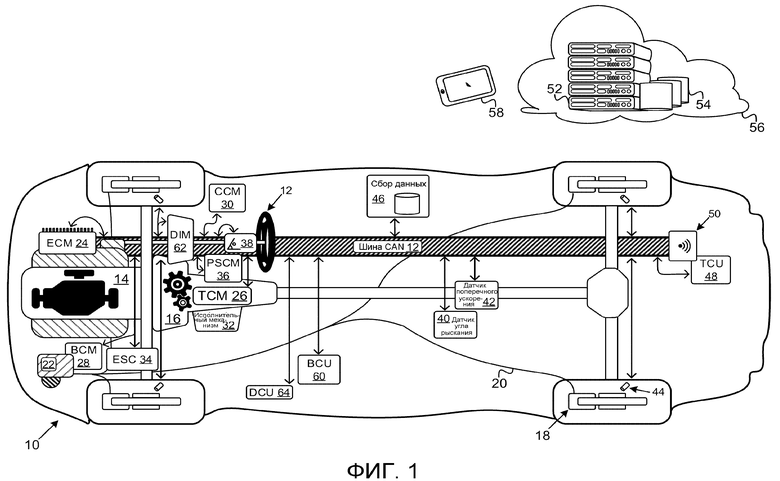
1. Система для передачи данных в систему управления транспортного средства, содержащая:
шину транспортного средства, предусмотренную внутри транспортного средства и работоспособную для обеспечения основанной на сообщениях связи с набором систем управления для транспортного средства;
модуль серверной стороны, присоединенный с возможностью связи к шине транспортного средства, работоспособный для:
сбора данных предварительного представления маршрута, индексированных значениями показателя для продвижения транспортного средства;
выполнения регрессионного анализа над данными предварительного представления маршрута для формирования набора коэффициентов, назначенных подфункциям, комбинированным в аппроксимирующую функцию, характеризующую отклонение данных предварительного представления маршрута относительно индексированных значений;
передачи коэффициентов посредством сообщений по шине транспортного средства;
модуль клиентской стороны, присоединенный с возможностью связи к шине транспортного средства, работоспособный для:
приема сообщений с шины транспортного средства;
извлечения набора коэффициентов из сообщений;
оценки аппроксимирующей функции в модуле клиентской стороны посредством применения набора коэффициентов к копии подфункций, поддерживаемых в модуле клиентской стороны;
использования оценки аппроксимирующей функции для выдачи указаний системе управления.
2. Система по п. 1, в которой:
транспортное средство является дорожным транспортным средством;
данные предварительного представления маршрута сообщают будущие значения для атрибута дороги у дороги, проезжаемой транспортным средством, будущие значения имеют ограничение на скорость изменения относительно индексированных значений, ограничение определяется соображениями проектирования для дороги, ограничение предоставляет аппроксимирующей функции возможность аппроксимировать данные предварительного представления маршрута более гладкой функцией, чем функция, аппроксимирующая данные с большими скоростями изменения; и
модуль серверной стороны дополнительно работоспособен для ограничения количества коэффициентов в наборе коэффициентов количеством, достаточным для аппроксимации данных предварительного представления маршрута, которое совместимо с ограничением по скорости изменения, в пределах специфичного использованию диапазона точности.
3. Система по п. 2, дополнительно содержащая модуль кодирования, работоспособный для кодирования коэффициентов некоторым количеством битов, модуль кодирования дополнительно работоспособен для ограничения количества битов, так чтобы произведение количества битов и количества коэффициентов было равным объему, который может переноситься в полезной нагрузке одиночного сообщения, определенного для шины транспортного средства.
4. Система по п. 2, в которой:
транспортное средство является дорожным транспортным средством;
данные предварительного представления маршрута сообщают будущие значения для атрибута дороги у дороги, проезжаемой транспортным средством, будущие значения имеют ограничение по амплитуде, предусматривающее границу для значений, которые могут быть выражены будущими значениями, так чтобы будущие значения находились в пределах диапазона возможных значений; и
система дополнительно содержит модуль кодирования, работоспособный для кодирования коэффициентов некоторым количеством битов, модуль кодирования дополнительно работоспособен для ограничения количества битов количеством, достаточным для предоставления коэффициентов с градацией, достаточной для формирования аппроксимирующей функции, допускающей будущие значения на краях диапазона возможных значений, тем временем удовлетворяя специфичному использованию разрешения.
5. Система по п. 4, в которой модуль клиентской стороны воспроизводит аппроксимирующую функцию в модуле клиентской стороны, умножая отдельные гауссовы функции на отдельные коэффициенты из набора коэффициентов, подфункции содержат набор гауссовых функций.
6. Система по п. 4, дополнительно содержащая модуль регрессии, присоединенный с возможностью связи к модулю серверной стороны и работоспособный для применения алгоритма минимальных наименьших квадратов (MLS) к данным предварительного представления маршрута и аппроксимациям, выведенным из набора коэффициентов и подфункций.
7. Система по п. 4, дополнительно содержащая модуль регрессии, работоспособный для применения набора весов к уравнению, используемому для определения набора коэффициентов во время регрессионного анализа, набор весов ставит больший акцент на данных, более близких к транспортному средству в пределах горизонта предварительного представления, предусмотренного данными предварительного представления маршрута.
8. Система по п. 4, дополнительно содержащая:
бортовой модуль сбора, работоспособный для сбора и хранения данных предварительного представления маршрута по мере того, как транспортное средство проезжает дорогу в предыдущей поездке; и при этом
модуль серверной стороны дополнительно работоспособен осуществлять доступ к данным предварительного представления маршрута из бортового модуля сбора, а не по шине транспортного средства.
9. Способ для сжатия данных шины транспортного средства, содержащий этапы, на которых:
формируют на сервере коэффициенты, применяемые к ядрам, тем временем подбирая кривую функции к данным будущих значений для атрибута дороги, индексированного будущим продвижением транспортного средства;
передают коэффициенты по шине транспортного средства в систему управления транспортного средства;
оценивают, в клиенте и для системы управления, будущее значение атрибута дороги, применяя коэффициенты с шины транспортного средства к копии ядер.
10. Способ по п. 9, дополнительно содержащий этап, на котором ограничивают количество коэффициентов, соразмерное с сокращенным количеством коэффициентов, требуемых для подбора кривой функции к данным с ограниченной скоростью изменения, устанавливаемой из принципов проектирования дорог.
11. Способ по п. 9, дополнительно содержащий этап, на котором кодируют информацию ограниченным количеством битов, соразмерным ограниченному диапазону возможных амплитуд для значений в пределах данных, предписанному принципами проектирования дорог.
12. Способ по п. 9, дополнительно содержащий этап, на котором используют набор гауссовых функций в качестве ядер для подбора кривой функции, гауссовы функции приспособлены к ограниченной скорости изменения и ограниченному диапазону возможных амплитуд для данных.
13. Способ по п. 12, дополнительно содержащий этап, на котором нормализуют набор гауссовых функций.
14. Способ по п. 9, дополнительно содержащий этапы, на которых:
ограничивают произведение количества коэффициентов и количества битов значением, обеспечиваемым полезной нагрузкой сообщения, доставляемого шиной транспортного средства; и
форматируют сообщение для переноса кодированных коэффициентов в систему управления по шине транспортного средства.
15. Система для передачи данных по шине транспортного средства, содержащая:
шину локальной сети контроллеров (CAN) внутри дорожного транспортного средства;
сервер, присоединенный с возможностью связи к шине CAN и содержащий процессор и память, работоспособный для:
подбора кривой функции, содержащей набор коэффициентов, соответствующих набору базисных функций, к данным посредством назначения значений набору коэффициентов, который подгоняет кривую функции к данным, данные предусматривают предстоящие значения для конкретного атрибута дороги, что касается дороги, по которой перемещается дорожное транспортное средство; и
передачи набора коэффициентов в сообщении CAN по шине CAN; и
клиента, присоединенного с возможностью связи к шине CAN и содержащего процессор и память, работоспособного для:
хранения копии набора базисных функций;
извлечения набора коэффициентов из сообщения CAN на шине CAN; и
оценки набора коэффициентов в качестве применяемых к набору базисных функций в ожидаемых точках по отношению к дороге.
16. Система по п. 15, дополнительно содержащая модуль подбора кривой, присоединенный с возможностью связи непосредственно к серверу, работоспособный для определения значений для количества коэффициентов, количество коэффициентов ограничено, чтобы быть соразмерным сглаживанию функции, предписанному ограничением по скорости изменения в данных для атрибута дороги, предписанным дорожными стандартами.
17. Система по п. 16, дополнительно содержащая модуль кодировщика, присоединенный с возможностью связи непосредственно к серверу, работоспособный для ограничения по меньшей мере одного количества битов, используемых для кодирования по меньшей мере одного коэффициента в наборе коэффициентов для включения в сообщение CAN, количеством, соразмерным разрешению, приспособленному к системе управления для ограниченного диапазона возможных амплитуд для данных, предписанного требованиями к дороге относительно атрибута дороги.
18. Система по п. 17, в которой модуль подбора кривой дополнительно работоспособен для определения значений для набора коэффициентов в качестве применяемых к набору гауссовых функций, служащих в качестве набора базисных функций и дающих в результате функцию, являющуюся хорошо приспособленной к ограничению по скорости изменения и ограниченному диапазону возможных амплитуд для данных.
19. Система по п. 17, в которой модуль подбора кривой дополнительно работоспособен для придания большего веса данным, более близким по дороге относительно движения транспортного средства, при подборе кривой функции к данным.
20. Система по п. 17, дополнительно содержащая модуль связи, присоединенный с возможностью связи непосредственно к серверу и работоспособный для приема данных из по меньшей мере одного из облачной вычислительной среды, соединения сети Интернет и мобильного устройства.
| US 2014245102 A1, 28.08.2014 | |||
| US 2013201316 A1, 08.08.2013 | |||
| US 2011264844 A1, 27.10.2011. |

