Область техники
[0001] Изобретение относится к устройству управления движением, которое устанавливается на транспортном средстве, способу управления движением и энергонезависимому носителю данных.
Уровень техники
[0002] Посредством гибридного транспортного средства, содержащего электромотор и двигатель внутреннего сгорания, можно улучшать топливную экономичность посредством управления движением, в котором электромотор и двигатель внутреннего сгорания используются выборочным и эффективным образом.
[0003] В японском патенте № 4702086 (JP 4702086 B) описано устройство помощи вождению транспортного средства, которое информирует пользователя о моменте начала торможения, в который действие рекуперативного торможения должно начаться, на основе позиции транспортного средства и картографической информации, включающей в себя точку требуемой остановки, такую как железнодорожный переезд, или точку требуемого замедления, такую как изгиб. В устройстве помощи вождению транспортного средства пользователю предлагается задействовать рекуперативный тормоз при скорости замедления, которая предоставляет возможность эффективного восстановления рекуперативной энергии, и, таким образом, может быть увеличена величина рекуперативной энергии, которая должна быть восстановлена.
Сущность изобретения
[0004] В способе согласно JP 4702086 B, может быть спрогнозирован момент, в который восстановление рекуперативной энергии может предполагаться, но величина восстановления рекуперативной энергии не может быть спрогнозирована количественным образом. В случае, когда величина восстановления рекуперативной энергии может быть количественным образом спрогнозирована на ранней стадии, величина восстановления может быть использована для подходящего управления движением.
[0005] Изобретение предоставляет устройство управления движением, способ управления движением и энергонезависимый носитель данных для количественного прогнозирования величины восстановления рекуперативной энергии, которая должна быть использована для управления движением.
[0006] Первый аспект изобретения относится к устройству управления движением, установленному на транспортном средстве, включающем в себя мотор и двигатель внутреннего сгорания в качестве источника мощности. Устройство управления движением включает в себя блок создания, сконфигурированный для создания профиля скорости, в котором прогнозируется скорость транспортного средства в каждый момент времени, блок оценки, выполненный с возможностью аппроксимировать профиль скорости с помощью заданной модели аппроксимации и оценивать прогнозируемую величину рекуперативной энергии на основе результата аппроксимации, рекуперативная энергия является энергией, которая может восстанавливаться посредством рекуперативного торможения электромотора, и блок определения, выполненный с возможностью определять источник мощности, который должен быть использован для движения, на основе спрогнозированной величины рекуперативной энергии.
[0007] В устройстве управления движением первого аспекта блок создания может быть сконфигурирован, чтобы создавать профиль скорости на основе одной или обеих из истории движения пользователя и истории движения другого пользователя.
[0008] В устройстве управления движением первого аспекта заданная модель аппроксимации может быть сконфигурирована для использования модели, которая аппроксимирует изменение в скорости транспортного средства с течением времени, которое указывается в профиле скорости, с суммой гауссовых функций, имеющих различные пиковые позиции.
[0009] В устройстве управления движением первого аспекта блок оценки может быть сконфигурирован, чтобы получать, на основе результата аппроксимации, мощность, указанную посредством суммы мощности, которая способствует изменению в кинетической энергии транспортного средства, и мощности, которая рассеивается посредством сопротивления движению, и рассматривать интегрированное по времени значение величины мощности в течение периода как оцениваемое значение прогнозируемой величины рекуперативной энергии, которая должна быть восстановлена. Период является одним или более периодами, в которых мощность является отрицательной, и периодом, в котором рекуперативная энергия может восстанавливаться.
[0010] В устройстве управления движением первого аспекта блок оценки может быть сконфигурирован, чтобы оценивать прогнозируемую величину рекуперативной энергии дополнительно на основе одного или более коэффициентов изменчивости.
[0011] В устройстве управления движением первого аспекта коэффициенты изменчивости могут быть, по меньшей мере, одним из типа поверхности дороги, уклона поверхности дороги, весовой нагрузки транспортного средства и погоды.
[0012] В устройстве управления движением первого аспекта блок оценки может быть сконфигурирован, чтобы корректировать мощность на основе коэффициентов изменчивости.
[0013] В устройстве управления движением первого аспекта блок оценки может быть сконфигурирован, чтобы корректировать интегрированное по времени значение на основе коэффициентов изменчивости.
[0014] В устройстве управления движением первого аспекта блок определения может быть сконфигурирован, чтобы определять, что электромотор должен быть использован для движения, когда удовлетворяется условие, включающее в себя то, что суммарная величина энергии для электромотора, которая в настоящее время заряжена в транспортное средство, и прогнозируемой величины рекуперативной энергии в следующем периоде равна или выше порогового значения.
[0015] Второй аспект изобретения относится к способу управления движением, выполняемому устройством управления движением, установленным на транспортном средстве, включающем в себя электромотор и двигатель внутреннего сгорания в качестве источника мощности. Способ управления движением включает в себя создание профиля скорости, в котором прогнозируется скорость транспортного средства в каждый момент времени, аппроксимацию профиля скорости с помощью заданной модели аппроксимации, и оценку прогнозируемой величины рекуперативной энергии на основе результата аппроксимации, рекуперативная энергия является энергией, которая может быть восстановлена посредством рекуперативного торможения электромотора, и определение источника мощности, используемого для движения, на основе прогнозируемой величины рекуперативной энергии.
[0016] Третий аспект изобретения относится к энергонезависимому носителю данных, который хранит программу управления движением, которая инструктирует компьютеру устройства управления движением, которое установлено на транспортном средстве, включающем в себя электромотор и двигатель внутреннего сгорания в качестве источника мощности, выполнять следующие функции: создание профиля скорости, в котором прогнозируется скорость транспортного средства в каждый момент времени; аппроксимацию профиля скорости с помощью заданной модели аппроксимации и оценку прогнозируемой величины рекуперативной энергии на основе результата аппроксимации, рекуперативная энергия является энергией, которая может быть восстановлена посредством рекуперативного торможения электромотора; и определение источника мощности, используемого для движения, на основе прогнозируемой величины рекуперативной энергии.
[0017] Согласно изобретению, может быть предоставлено устройство управления движением, которое создает профиль скорости, в котором скорость транспортного средства прогнозируется, количественно прогнозирует величину восстановления рекуперативной энергии на основе профиля скорости, и использует спрогнозированную величину восстановления для управления движением.
Краткое описание чертежей
[0018] Признаки, преимущества и техническое и промышленное значение примерных вариантов осуществления изобретения будут описаны ниже со ссылкой на сопровождающие чертежи, на которых идентичными ссылочными позициями обозначены аналогичные элементы, и на которых:
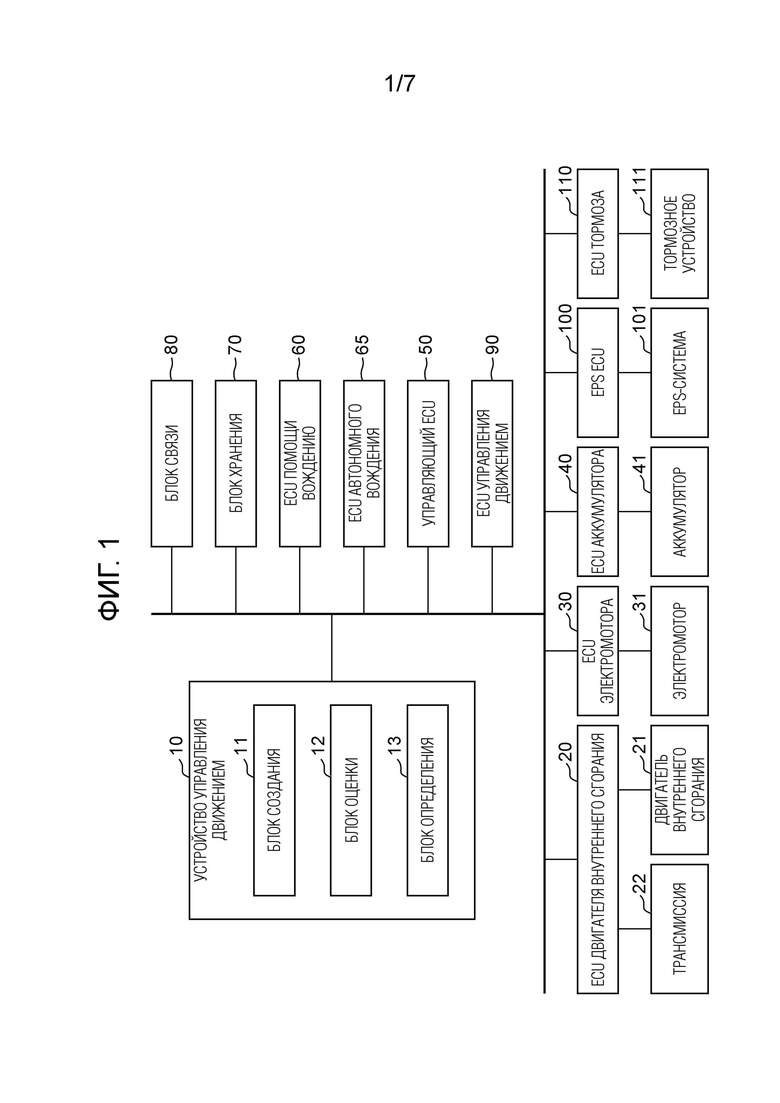
Фиг. 1 - функциональная блок-схема устройства управления движением согласно варианту осуществления изобретения и его периферийных компонентов;
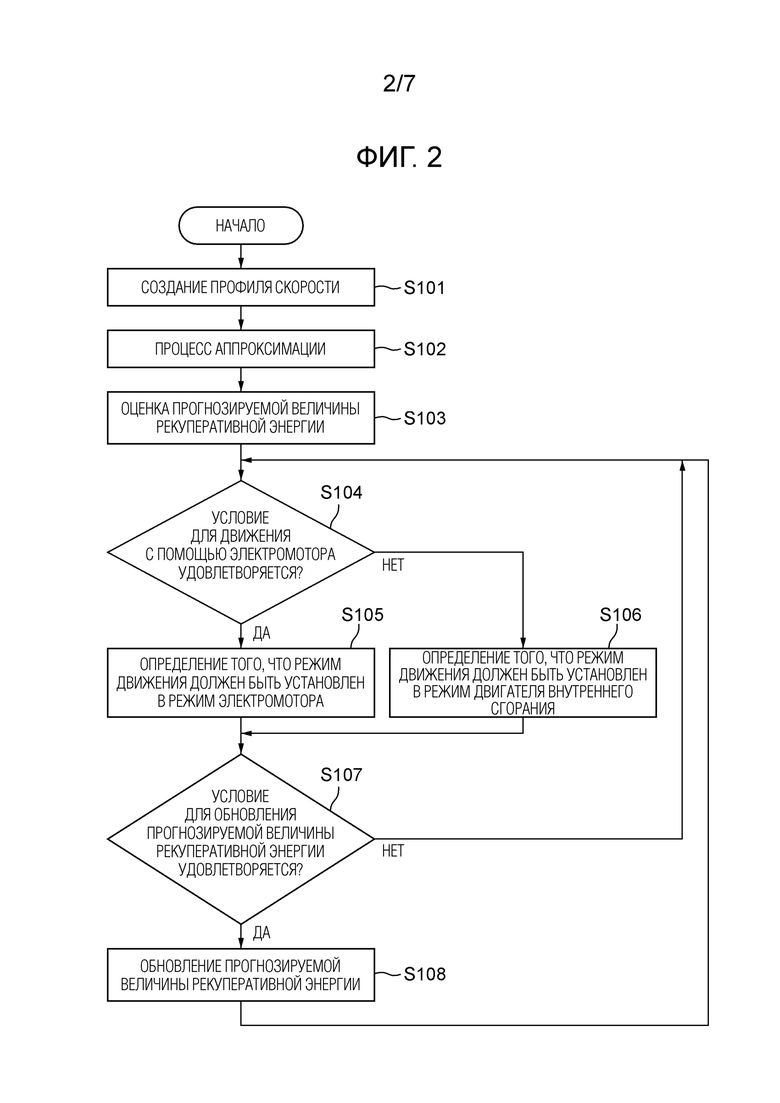
Фиг. 2 - блок-схема последовательности операций процесса управления движением согласно варианту осуществления изобретения;
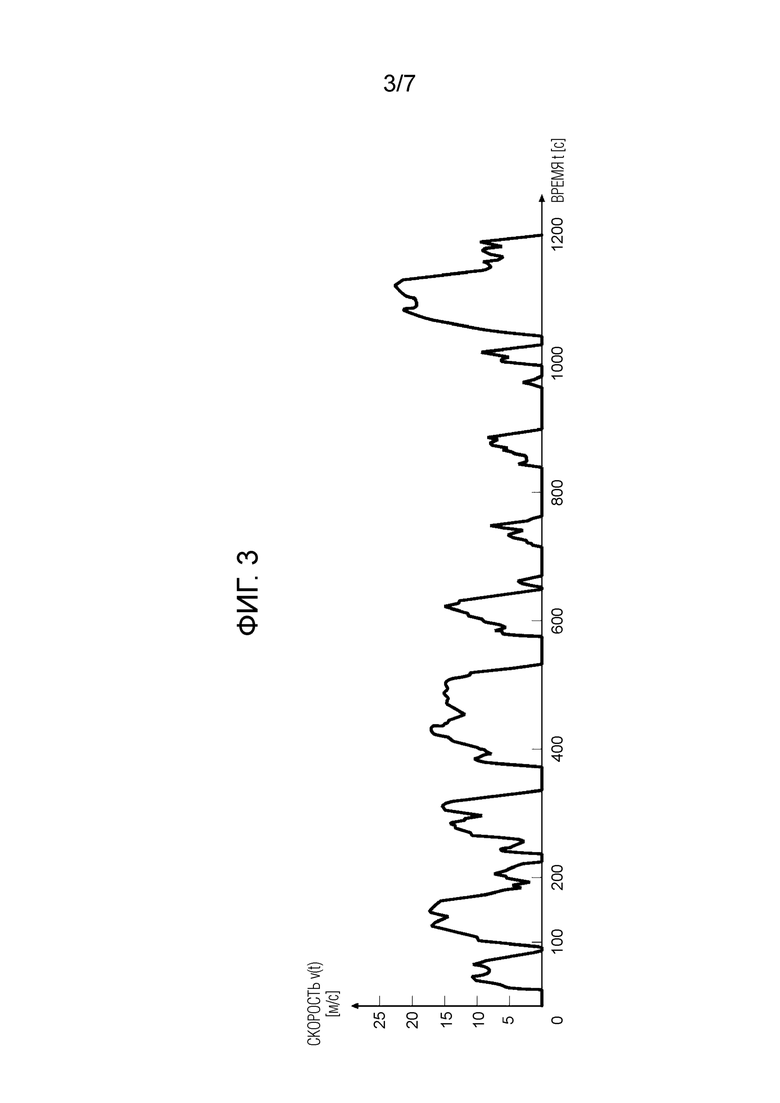
Фиг. 3 - график, показывающий пример профиля скорости согласно варианту осуществления изобретения;
Фиг. 4 - график, показывающий гауссову функцию;
Фиг. 5 - график, показывающий часть примера профиля скорости согласно варианту осуществления изобретения и аппроксимацию части примера профиля скорости с помощью гауссовой функции;
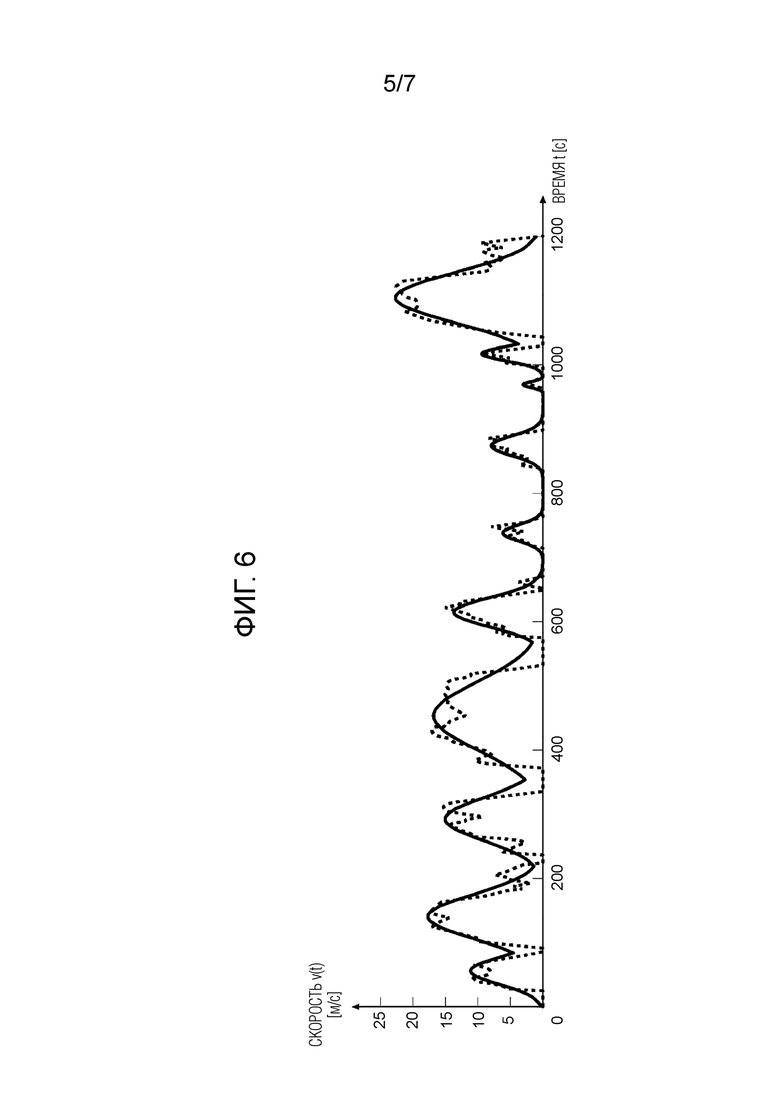
Фиг. 6 - график, показывающий пример профиля скорости согласно варианту осуществления изобретения и аппроксимацию примера профиля скорости с помощью гауссовой функции;
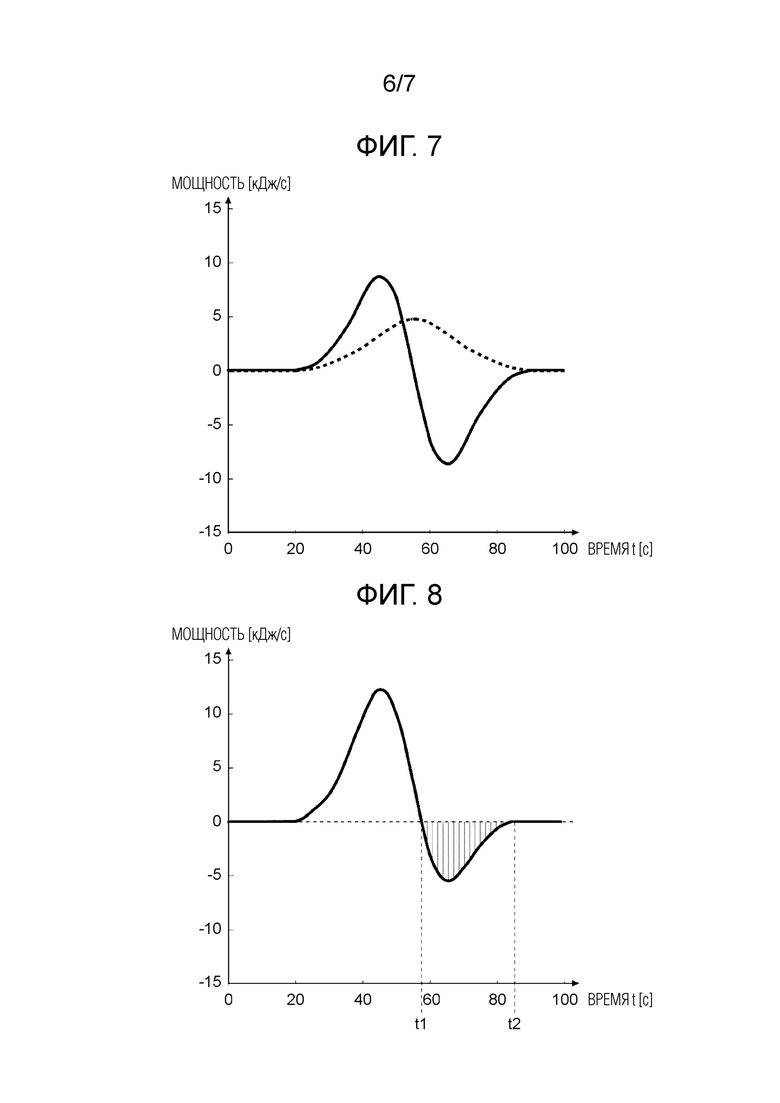
Фиг. 7 - график, показывающий пример величины требуемой мощности согласно варианту осуществления изобретения, которая связана с изменением в кинетической энергии, и величины требуемой мощности, которая рассеивается посредством сопротивления движению;
Фиг. 8 - график, показывающий пример требуемой мощности согласно варианту осуществления изобретения; и
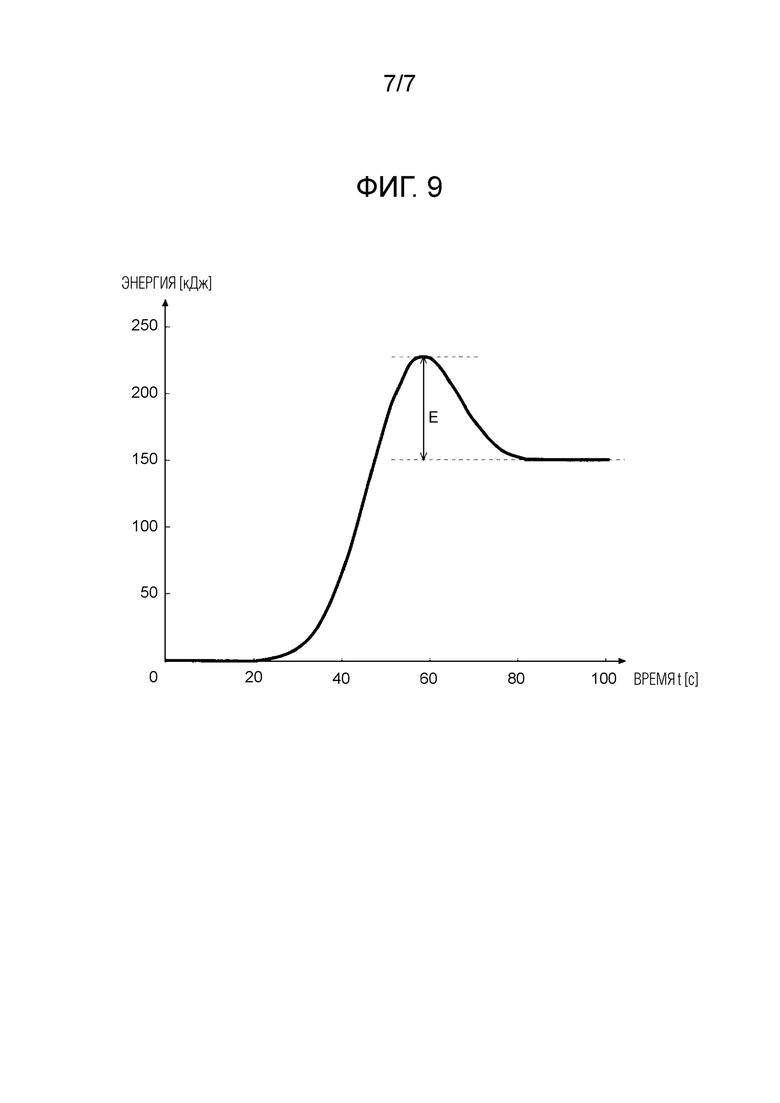
Фиг. 9 - график, показывающий пример интегрального значения требуемой мощности согласно варианту осуществления изобретения.
Подробное описание вариантов осуществления изобретения
Вариант осуществления
[0019] Вариант осуществления настоящего изобретения будет описан ниже со ссылкой на чертежи. Устройство управления движением согласно настоящему варианту осуществления использует профиль скорости, в котором скорость транспортного средства прогнозируется, чтобы количественно прогнозировать величину восстановления рекуперативной энергии на ранней стадии, чтобы выполнять подходящее управление движением для улучшения топливной экономичности.
Конфигурация
[0020] Фиг. 1 показывает функциональные блоки устройства 10 управления движением согласно настоящему варианту осуществления и его периферийные компоненты. Устройство 10 управления движением устанавливается на транспортное средство. Транспортное средство включает в себя, в дополнение к устройству 10 управления движением, электронный блок управления (ECU) 20 двигателем внутреннего сгорания, двигатель 21 внутреннего сгорания, трансмиссию 22, ECU 30 электромотора, электромотор 31, ECU 40 аккумулятора, аккумулятор 41, управляющий ECU 50, ECU 60 помощи вождению, ECU 65 автономного вождения, блок 70 хранения, блок 80 связи, ECU 90 управления движением, ECU 100 электроусилителя руля (EPS), EPS-систему 101, ECU 110 тормоза и тормозное устройство 111.
[0021] Транспортное средство может также включать в себя различные устройства, такие как датчик педали акселератора, датчик педали тормоза, камеру или датчик препятствия, датчик скорости транспортного средства, датчик поворота вокруг вертикальной оси, датчик системы глобального позиционирования (GPS) и различные другие датчики, и навигационную систему, но различные устройства не показаны.
[0022] Двигатель 21 внутреннего сгорания и электромотор 31 являются актуаторами, которые служат в качестве источника мощности для привода транспортного средства. Электромотор 31 также является генератором, который генерирует мощность, и тормозной системой, которая формирует тормозное усилие посредством рекуперативного торможения.
[0023] ECU 20 двигателя внутреннего сгорания является ECU, который управляет двигателем 21 внутреннего сгорания и трансмиссией 22, которая изменяет скорость вращения между входом и выходом, чтобы формировать крутящий момент привода и формировать тормозной момент с помощью торможения двигателем.
[0024] ECU 30 электромотора является ECU, который управляет электромотором 31, чтобы формировать крутящий момент привода и формировать тормозной момент с помощью рекуперативного торможения.
[0025] Аккумулятор 41 подает электрическую мощность к электромотору 31 и другим устройствам посредством разрядки и заряжается электрической мощностью (восстановленной энергией), полученной посредством рекуперативного торможения электромотора 31. ECU 40 аккумулятора является ECU, который управляет зарядом и разрядом электрической мощности аккумулятора 41.
[0026] ECU 90 управления движением является ECU, который управляет ECU 20 двигателя внутреннего сгорания и ECU 30 электромотора в соответствии с режимом движения, описанным позже.
[0027] EPS-система 101 является актуатором, который выполняет рулевое управление, изменяя угол поворота управляемых колес, чтобы изменять направление движения транспортного средства. EPS ECU 100 является ECU, который управляет EPS-системой 101.
[0028] Тормозное устройство 111 (устройство ножного тормоза) является актуатором, который формирует тормозное усилие посредством силы трения, прикладываемой к элементу, который вращается с колесом. ECU 110 тормоза является ECU, который управляет тормозным устройством 111.
[0029] ECU 60 помощи вождению является ECU, который выполняет функции помощи вождению, такие как предотвращение столкновения, следование за впереди идущим транспортным средством и удержание на полосе движения. ECU 60 помощи вождению выводит инструкцию управления движением транспортным средством, включающую в себя ускорение/замедление и угол поворота управляемых колес, на основе информации, полученной от различных датчиков и т.п. Функция ECU 60 помощи вождению и число ECU 60 помощи вождению не ограничиваются.
[0030] ECU 65 автономного вождения выводит инструкцию для управления движением транспортного средства, включающую в себя ускорение/замедление и угол поворота управляемых колес, чтобы выполнять функцию автономного вождения на основе информации, полученной от различных датчиков или т.п.
[0031] Управляющий ECU 50 выдает инструкцию для ECU 90 управления движением, EPS ECU 100, ECU 110 тормоза и т.д. (далее в данном документе совокупно называемых ECU актуаторов) на основе инструкций от ECU 60 помощи вождению, ECU 65 автономного вождения и т.п. Например, инструкция для ускорения выдается для ECU 90 управления движением, инструкция для рулевого управления выдается для EPS ECU 100, и инструкция для замедления выдается для ECU 90 управления движением и ECU 110 тормоза.
[0032] После приема инструкции от множества ECU 60 помощи вождению или т.п. управляющий ECU 50 выполняет процесс, называемый арбитражем, в котором управляющий ECU 50 определяет, какой инструкции следовать для управления транспортным средством, на основе заданного правила, и выдает инструкцию для ECU актуаторов на основе результата арбитража. Действия пользователя для рулевого колеса, педали тормоза, педали акселератора и т.п. могут быть получены посредством управляющего ECU 50 и подвергнуты процессу арбитража посредством управляющего ECU 50 или могут быть получены посредством ECU актуаторов, и ECU актуаторов могут индивидуально осуществлять арбитраж между ручными действиями пользователя и инструкцией от управляющего ECU 50.
[0033] Блок 70 хранения хранит одну или более историй движения пользователя. История движения - это информация, включающая в себя скорость транспортного средства в каждый момент времени в течение периода вождения, когда транспортное средство управлялось в прошлом. Блок 70 хранения формирует историю движения, периодически сохраняя скорость транспортного средства, полученную от датчика скорости транспортного средства или т.п., установленного на транспортном средстве, в то время как транспортное средство находится во включенном состоянии, например. Блок 70 хранения может быть предоставлен как часть навигационной системы транспортного средства, например.
[0034] Блок 80 связи может связываться беспроводным образом с сервером за пределами транспортного средства, другим транспортным средством и т.д. и может принимать историю движения другого пользователя, которая получается на основе результата движения другого транспортного средства.
[0035] Устройство 10 управления движением является ECU, который включает в себя блок 11 создания, блок 12 оценки и блок 13 определения. Блок 11 создания создает профиль скорости на основе истории движения. Блок 12 оценки оценивает прогнозируемую величину рекуперативной энергии, которая является энергией, которая восстанавливается посредством рекуперативного торможения, на основе профиля скорости. Блок 13 определения определяет какой-либо из электромотора 31 и двигателя 21 внутреннего сгорания, который должен быть использован для движения, на основе прогнозируемой величины рекуперативной энергии.
[0036] Каждый из вышеописанных ECU типично является компьютером, включающим в себя память и процессор. Процессор каждого ECU реализует функцию, например, считывая и исполняя программу, сохраненную в энергонезависимой памяти. Эти ECU соединяются друг с другом посредством линий связи и могут работать совместно, связываясь друг с другом при необходимости.
[0037] Конфигурация устройств, установленных на транспортном средстве, и конфигурация устройства 10 управления движением, описанного выше, являются просто примерами, и дополнения, замены, изменения и пропуски могут быть выполнены надлежащим образом. Дополнительно, функции каждого устройства могут быть надлежащим образом объединены в одно устройство или распределены на множество устройств для реализации.
[0038] Например, устройство 10 управления движением может быть предусмотрено как независимый ECU или может быть предусмотрено как часть управляющего ECU 50 или часть ECU 90 управления движением, или т.п. Альтернативно, функции устройства 10 управления движением могут быть распределены управляющему ECU 50, ECU 90 управления движением или т.п.
[0039] Например, устройство 10 управления движением, ECU 60 помощи вождению, ECU 65 автономного вождения, управляющий ECU 50, ECU 90 управления движением или т.п. могут быть предусмотрены как единый ECU. Дополнительно, например, нет необходимости предусматривать ECU 65 автономного вождения.
Процесс
[0040] Подробности процессов согласно настоящему варианту осуществления будут описаны ниже. Фиг. 2 - это блок-схема последовательности операций процессов, исполняемых устройством 10 управления движением. Процессы начинаются, например, когда пользователь устанавливает транспортное средство во включенное состояние и начинает поездку, и выполняются до тех пор, пока пользователь не установит транспортное средство в выключенное состояние и закончит поездку.
Этап S101
[0041] Блок 11 создания создает профиль скорости. Профиль скорости является информацией, представляющей скорость транспортного средства в каждый момент времени, который прогнозируется в текущей поездке.
[0042] Фиг. 3 показывает пример профиля скорости. На фиг. 3 горизонтальная ось показывает время, прошедшее от начала поездки, а вертикальная ось показывает скорость транспортного средства. В качестве примера, фиг. 3 показывает профиль скорости на основе характера изменения скорости, используемого в тесте расхода топлива (режим JC08), установленном в Японии. График профиля скорости, как правило, включает в себя множество пиков, указывающих, что ускорение и замедление повторяются во время одной поездки.
[0043] Блок 11 создания может создавать профиль скорости, например, на основе истории движения, сохраненной в блоке 70 хранения. В качестве простого примера, когда характер движения пользователя включает в себя только характер, в котором пользователь движется по одному и тому же маршруту в одно и то же время дня в будние дни на работу и обратно, считается, что характеры изменений скорости с течением времени, которые включены в истории движения, являются практически одинаковыми. В таком случае, блок 11 создания может создавать профиль скорости на основе одной из прошлых историй движения.
[0044] Блок 70 хранения может ассоциировать истории движения с атрибутами, такими как день недели и время дня, в которое транспортное средство двигалось, и классифицировать и сохранять ассоциированные истории движения и атрибуты. Таким образом, блок 11 создания может создавать профиль скорости на основе истории движения, имеющей большое число атрибутов, таких как день недели и время дня, которые соответствуют дню и времени текущей поездки. В результате, даже для пользователя, который имеет более одного характера движения, пока атрибуты имеют общие характеры движения, характер движения может быть указан с некоторой точностью, и профиль скорости может быть создан точно.
[0045] Блок 70 хранения может получать маршрут движения от навигационной системы или т.п., включенной в транспортное средство, и сохранять маршрут движения в истории движения. Таким образом, блок 11 создания может создавать профиль скорости на основе истории движения, включающей в себя маршрут движения, имеющий высокие сходства с маршрутом движения текущей поездки. Этот способ может выполняться, когда пользователь задает маршрут движения в навигационной системе или т.п. в текущей поездке, и блок 11 создания может получать заданный маршрут движения. Точность профиля скорости может, таким образом, быть улучшена.
[0046] Когда маршрут движения задается для текущей поездки, блок 11 создания может опрашивать сервер об информации дорожного движения, такой как ограничение скорости и прогнозирование дорожной пробки по маршруту движения, через блок 80 связи и создавать профиль скорости на основе информации дорожного движения. Альтернативно, блок 11 создания может выполнять запрос, через блок 80 связи, серверу, который может создавать профиль скорости на основе информации дорожного движения по маршруту движения, чтобы создавать профиль скорости и получать созданный профиль скорости.
[0047] Блок 11 создания может получать историю движения другого пользователя через блок 80 связи и создавать профиль скорости на основе истории движения. Сервер собирает, например, истории движения, ассоциированные с днем недели, временем дня, маршрутом движения и т.п., от большого числа транспортных средств и классифицирует и сохраняет истории движения. Блок 11 создания может получать историю движения, имеющую высокую степень совпадения классификации с текущей поездкой, и создавать профиль скорости на основе истории движения.
[0048] Сервер может делить множество людей на группы и сохранять историю движения каждого человека для каждой группы. Блок 11 создания может создавать профиль скорости на основе истории движения, выбранной из той же группы, к которой пользователь принадлежит. Например, когда люди со своими домами и местами работы, расположенными в одной и той же области, принадлежат одной и той же группе, точность профиля скорости при движении на работу и обратно может быть улучшена.
[0049] Альтернативно, блок 11 создания может получать, через блок 80 связи, историю движения, сохраненную в одном или более транспортных средствах вместо сервера, и создавать профиль скорости тем же образом, что и описанный выше, на основе полученной истории движения.
[0050] В каждом из вышеупомянутых способов, когда существует множество историй движения, которые служат в качестве кандидатов для профиля скорости, например, блок 11 создания может задавать любую историю из историй движения в качестве профиля скорости или может усреднять истории движения в качестве профиля скорости. Способ создания профиля скорости не ограничивается, и вышеупомянутые способы могут быть объединены при необходимости. Профиль скорости может быть создан с помощью лишь одной из истории движения пользователя и истории движения другого пользователя, или профиль скорости может быть создан с помощью обеих из истории движения пользователя и истории движения другого пользователя.
Этап S102
[0051] Блок 12 оценки аппроксимирует профиль скорости с помощью заданной модели аппроксимации. В этом варианте осуществления сумма гауссовых функций используется для аппроксимации. Фиг. 4 показывает график (t ≥ 0) гауссовой функции, представленной (выражением 1) и имеющей время t в качестве переменной. Здесь, μ - это параметр, который определяет пиковую позицию (время), vmax - это параметр, который определяет пиковое значение, и σ - это параметр, который определяет разброс распределения.
 (выражение 1)
(выражение 1)
[0052] Фиг. 5 показывает график, аппроксимирующий изменение скорости в диапазоне 0 ≤ t ≤ 100 (секунд) профиля скорости, показанного на фиг. 3, с параметрами μ, vmax и σ в выражении 1, заданными соответствующим образом. На фиг. 5 профиль скорости показан пунктирной линией, а график аппроксимации показан сплошной линией.
[0053] В настоящем варианте осуществления весь профиль скорости аппроксимируется посредством суммы гауссовых функций, имеющих различные пиковые позиции μi. Каждая гауссова функция может иметь различные пиковые значения vmaxi и разбросы σi. Когда число гауссовых функций, которые должны быть использованы, представляется как N, выражение аппроксимации может быть представлено выражением 2 с помощью μi, vmaxi и σi (i=1, 2, …, N) в качестве параметров.
 (выражение 2)
(выражение 2)
[0054] Здесь, подходящие значения могут быть получены как параметры μi, vmaxi и σi (i=1, 2, …, N) с помощью известного метода подбора кривой. Например, значения могут быть определены так, что минимальное интегральное значение S получается интегрированием абсолютного значения разности между значением V(t) скорости и аппроксимированным значением v(t) по всему периоду (0 ≤ t ≤T) профиля скорости. Интегральное значение S представляется выражением 3.
 (выражение 3)
(выражение 3)
[0055] С помощью этого способа получаются параметры μi, vmaxi и σi (i=1, 2, …, N) в выражении 2, и график, аппроксимирующий изменение скорости в течение всего периода профиля скорости, показанного на фиг. 3, показывается на фиг. 6. На фиг. 6 профиль скорости показан пунктирной линией, а график аппроксимации показан сплошной линией. В этом примере N=10.
[0056] Может быть понятно из фиг. 6, что хорошая аппроксимация, характеризующая изменение скорости в одной поездке, может быть получена. Значение N не ограничивается и может быть определено согласно продолжительности периода поездки для профиля скорости и числу пиков в изменении скорости. Например, в случае поездки около 1200 секунд, хорошая аппроксимация может быть получена с N=10, а более хорошая аппроксимация может быть получена с N=20. Отметим, что N=1 может быть задано, когда период поездки является относительно коротким, или когда число пиков является относительно небольшим.
Этап S103
[0057] Блок 12 оценки оценивает прогнозируемую величину рекуперативной энергии, т.е., энергии, получаемой посредством рекуперативного торможения электромотора 31, с помощью модели аппроксимации. Способ оценки будет описан ниже.
[0058] Сначала, блок 12 оценки получает требуемую мощность P(t), т.е., мощность, которая должна быть предоставлена транспортному средству для того, чтобы поддерживать скорость v(t). Требуемая мощность P(t) представляется выражением 4.
 (выражение 4)
(выражение 4)
[0059] Здесь, m представляет вес транспортного средства. Выражение m ∙ dv(t)/dt представляет степень изменения момента транспортного средства, а выражение a ∙ (v(t))2+b ∙ v(t) + c представляет сопротивление движению. Требуемая мощность P(t) является суммой вышеописанных выражений, каждое умноженное на скорость v(t) транспортного средства. То есть, требуемая мощность P(t) является суммой мощности, которая способствует изменению в кинетической энергии транспортного средства, и мощности, которая рассеивается посредством сопротивления движению, и является мощностью, которая является необходимой для реализации скорости v(t) во время t. Сопротивление движению может быть надлежащим образом аппроксимировано с помощью суммы компонента, пропорционального квадрату скорости, компонента, пропорционального первой мощности для скорости, и постоянного компонента, как показано в выражении 4.
[0060] Фиг. 7 показывает пример величины требуемой мощности P(t), которая способствует изменению в кинетической энергии (первый член с правой стороны выражения 4), сплошной линией и пример величины требуемой мощности P(t), которая рассеивается вследствие сопротивления движению (второй член с правой стороны выражения 4) пунктирной линией для требуемой мощности P(t) в диапазоне 0 ≤ t ≤ 100 (секунд) профиля скорости, показанного на фиг. 3, при этом горизонтальная ось представляет время, а вертикальная ось представляет мощность.
[0061] Фиг. 8 показывает график суммарной величины требуемой мощности P(t), при этом горизонтальная ось представляет время, а вертикальная ось представляет мощность.
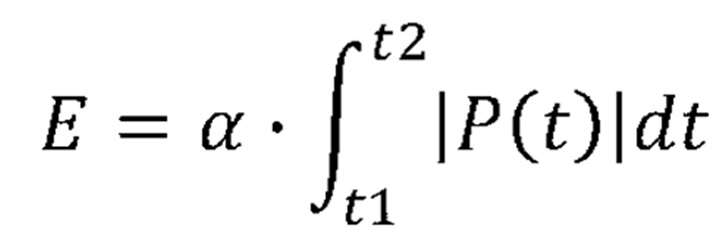
[0062] Далее, блок 12 оценки оценивает период, в котором прогнозируется, что рекуперативная энергия может быть восстановлена, и прогнозируемую величину восстановления на основе требуемой мощности P(t). В графике, показанном на фиг. 8, период, в котором значение требуемой мощности P(t) становится отрицательным (t1 < t < t2), является периодом, в котором прогнозируется, что рекуперативная энергия может быть восстановлена. Интегральное значение величины требуемой мощности в вышеописанном периоде, которое представлено выражением 5, т.е., площадь заштрихованной области на фиг. 8, является оцениваемым значением E прогнозируемой величины рекуперативной энергии, которая должна быть восстановлена.
 (выражение 5)
(выражение 5)
[0063] Фиг. 9 показывает график интегрального значения I(t) требуемой мощности, показанной на фиг. 8, со времени 0 до времени t, при этом горизонтальная ось представляет время, а вертикальная ось представляет энергию. Интегральное значение I(t) представляется выражением 6.
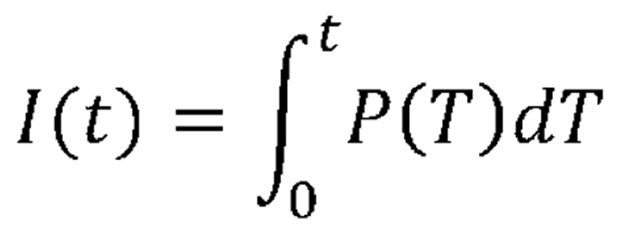 (выражение 6)
(выражение 6)
[0064] На фиг. 9 разница между значением энергии на пике и значением энергии, когда линия становится горизонтальной после пика, равна оцениваемому значению E прогнозируемой величины рекуперативной энергии, которая должна быть восстановлена.
[0065] Посредством извлечения одного или более периодов, в которых требуемая мощность становится отрицательной, как описано выше, из всего периода профиля скорости и вычисления интегрального значения величины требуемой мощности для каждого периода, один или более периодов, в которых рекуперативная энергия может быть восстановлена, и прогнозируемая величина восстановления для каждого периода может быть оценена в начале поездки.
[0066] Вес m транспортного средства и коэффициенты a, b и c являются, в основном, константами, определенными на основе характеристик транспортного средства, и хорошая точность оценки может быть получена посредством задания соответствующих значений. Точность оценки может быть дополнительно улучшена, когда один или более переменных факторов, которые могут влиять на требуемую мощность, могут быть получены, и последующая корректировка выполняется, по меньшей мере, в одном из веса m и коэффициентов a, b и c на основе полученных переменных факторов.
[0067] Например, когда блок 12 оценки может получать весовую нагрузку пассажира, багажа или т.п. из входных данных от датчика веса или т.п., предусмотренных в транспортном средстве, или из входных данных от пользователя, блок 12 оценки может добавлять весовую нагрузку к весу m транспортного средства, чтобы корректировать вес m.
[0068] Блок 12 оценки может корректировать коэффициенты a, b и c с помощью факторов изменчивости сопротивления движению, таких как тип поверхности дороги, уклон поверхности дороги и погода, когда факторы изменчивости могут быть получены.
[0069] Например, когда маршрут движения задается для текущей поездки, тип поверхности дороги и уклон поверхности дороги могут быть указаны, и коэффициенты могут быть скорректированы с помощью этих частей информации. Информация о типе поверхности дороги и уклоне поверхности дороги может быть сохранена заранее в блоке 70 хранения в ассоциации с картографической информацией, или может быть получена посредством блока 80 связи от внешнего сервера или т.п. Коэффициенты могут также быть скорректированы с помощью погоды. Информация о погоде может быть получена посредством различных датчиков, предусмотренных в транспортном средстве, или блок 80 связи может получать информацию о погоде от внешнего сервера или т.п.
[0070] Например, когда поверхность дороги является относительно скользкой, такой как гравийная дорога, сопротивление движению корректируется в большую сторону по сравнению с сопротивлением движению, когда дорога является дорогой с твердым покрытием, на которой относительно трудно скользить.
[0071] Когда уклон поверхности дороги указывает, что дорога является дорогой с подъемом, сопротивление движению корректируется так, чтобы быть большим по сравнению с тем, когда дорога является горизонтальной дорогой, а когда уклон поверхности дороги указывает, что дорога является дорогой со спуском, сопротивление движению корректируется так, чтобы быть меньшим по сравнению с тем, когда дорога является горизонтальной дорогой. Влияние увеличения или уменьшения в позиционной энергии транспортного средства на требуемую мощность P(t) включено в выражение 4 посредством этой корректировки сопротивления движению на основе уклона поверхности дороги.
[0072] Когда погода является дождливой или снежной, сопротивление движению корректируется в большую сторону по сравнению с тем, когда погода является солнечной. Когда маршрут движения задается для текущей поездки, направление движению транспортного средства может быть рассчитано, таким образом, сопротивление движению может быть скорректировано на основе силы ветра и направления ветра, которые рассматриваются в качестве погодных условий. Например, когда сила ветра не равна нулю, сопротивление движению корректируется в большую сторону в случае встречного ветра и в меньшую в случае попутного ветра по сравнению с тем, когда сила ветра равна нулю, на основе объема ветра и направления ветра.
[0073] Когда сопротивление движению корректируется вышеописанным способом, в частности, значения коэффициентов a, b и c изменяются. В этом случае, коэффициенты a, b и c изменяются в зависимости от позиции транспортного средства. Коэффициенты a, b и c могут, каждый, быть уменьшены до функции времени t с аппроксимацией в выражении 2. Коэффициент, который должен быть скорректирован из коэффициентов a, b и c, и степень корректировки могут быть соответственно определены с учетом зависящих от скорости характеристик влияния факторов изменчивости на сопротивление движению.
[0074] Блок 12 оценки может корректировать значение оцениваемого значения E в соответствии с вышеописанными факторами изменчивости, вместо вышеописанной корректировки или в дополнение к вышеописанной корректировке. То есть, коэффициент α корректировки (например, 0 ≤ α ≤ 1) может быть задан для каждого периода, так что значение скорректированного оцениваемого значения E становится меньше, когда весовая нагрузка становится больше, или сопротивление движению становится больше вследствие факторов изменчивости. Коэффициент α корректировки может, таким образом, быть скорректирован, как представлено выражением 7.
 (выражение 7)
(выражение 7)
[0075] Коэффициент α корректировки может объединять эффективность рекуперативного торможения, так что оцениваемое значение E после корректировки увеличивается, когда эффективность рекуперативного торможения увеличивается. Эффективность рекуперативного торможения может быть получена, например, на основе скорости вращения электромотора 31, предполагаемой в соответствии со скоростью v(t), и карты эффективности, соответствующей скорости вращения.
[0076] Способ числового вычисления для вышеописанного процесса особым образом не ограничивается, и известный вычислительный алгоритм может быть использован при необходимости. В настоящем варианте осуществления аппроксимация с помощью гауссовых функций может указывать характеристики профиля скорости с относительно небольшим числом параметров, так что объем вычисления может быть сдержанным. Объем вычислений может быть дополнительно уменьшен, когда гауссовы функции и значения функций для производных для множества числовых значений и точные интегральные значения гауссовых функций во множестве числовых диапазонов подготавливаются заранее в числовой таблице, и вычисление выполняется посредством ссылки на числовую таблицу при необходимости.
Этап S104
[0077] Блок 13 определения определяет, удовлетворяется ли условие для движения с помощью электромотора 31. В настоящем варианте осуществления, в качестве примера, блок 13 определения выполняет управление для переключения режима движения между режимом электромотора, в котором только электромотор 31 используется, и режимом двигателя внутреннего сгорания, в котором только двигатель 21 внутреннего сгорания используется.
[0078] Здесь, блок 13 определения соответственно получает различные части информации от различных датчиков, предусмотренных в транспортном средстве, ECU 60 помощи вождению, управляющего ECU 50 и т.п. и выполняет определение, как описано ниже, например.
[0079] (1) Когда намерение замедлить транспортное средство устанавливается, определяется, удовлетворяются ли следующие условия (1-1) по (1-3). "Намерение замедлить транспортное средство устанавливается" означает, например, что, по меньшей мере, одно из факта того, что задействование педали тормоза выполняется пользователем, и задействование педали акселератора прекращается пользователем, в то время как транспортное средство движется, удовлетворяется, или инструкция, указывающая замедление или остановку, выдается из ECU помощи вождению или ECU автономного вождения, в то время как функция помощи вождению ECU 60 помощи вождению и функция автономного вождения ECU 65 автономного вождения работают.
[0080] (1-1) Скорость транспортного средства равна или выше первой пороговой скорости. Когда текущая фактическая скорость транспортного средства является относительно низкой, достаточная скорость вращения электромотора 31 не может быть получена во время рекуперативного торможения, и эффективное восстановление рекуперативной энергии не может быть спрогнозировано. Таким образом, определяется, является ли скорость транспортного средства равной или выше первой пороговой скорости, которая определяется как скорость, при которой некоторая степень рекуперативной эффективности может быть спрогнозирована.
[0081] (1-2) Требуемая мощность равна или ниже первой пороговой мощности. Когда текущая требуемая мощность является относительно большой, двигатель 21 внутреннего сгорания может выводить требуемую мощность, но, поскольку электромотор 31, как правило, имеет меньшую максимальную выходную мощность по сравнению с двигателем 21 внутреннего сгорания, электромотор 31 может не иметь возможности выводить требуемую мощность. Таким образом, определяется, является ли требуемая мощность равной или ниже первой пороговой мощности, которая определяется как мощность, которая может быть выведена от электромотора 31.
[0082] (1-3) Степень заряда аккумулятора 41 равна или ниже первого порогового значения степени заряда. Когда текущая степень заряда аккумулятора 41 является высокой, величина электрической мощности, которая дополнительно имеет возможность быть заряженной, является небольшой, и существует вероятность того, что вся рекуперативная энергия не может быть сохранена. Таким образом, определяется, является ли степень заряда аккумулятора 41 равной или ниже первого порогового значения степени заряда, которое определяется как степень заряда, которая предоставляет возможность заряда достаточной величины электрической мощности. Величина заряженной электрической мощности может быть использована вместо степени заряда для определения.
[0083] Когда все результаты определения для (1-1) по (1-3) являются утвердительными, процесс переходит к этапу S105, а иначе, процесс переходит к этапу S106.
[0084] (2) В случаях, отличных от вышеописанного (1), т.е., за исключением того, когда намерение замедлить транспортное средство устанавливается, определяется, удовлетворяются ли следующие условия (2-1) по (2-4).
[0085] (2-1) Скорость транспортного средства ниже второй пороговой скорости. Двигатель 21 внутреннего сгорания, как правило, является более эффективным по сравнению с электромотором 31, когда текущая фактическая скорость транспортного средства является относительно высокой. Таким образом, определяется, является ли скорость транспортного средства ниже второй пороговой скорости, которая определяется как скорость, при которой электромотор 31 может быть спрогнозирован как более эффективный по сравнению с двигателем 21 внутреннего сгорания. Вторая пороговая скорость является скоростью, более высокой по сравнению с первой пороговой скоростью.
[0086] (2-2) Требуемая мощность равна или ниже первой пороговой мощности. По той же причине, что и (1-2), описанная выше, определяется, является ли требуемая мощность равной или ниже первой пороговой мощности, которая определяется как мощность, которая может быть выведена от электромотора 31.
[0087] (2-3) Суммарная величина энергии для электромотора, которая в настоящее время заряжена в транспортном средстве, и прогнозируемой величины энергии, которая должна быть восстановлена в периоде, в котором рекуперативная энергия может быть восстановлена в следующий раз, равна или выше первого порогового значения энергии. Когда суммарная величина для величины электрической мощности, которая в настоящее время заряжена в аккумуляторе 41 в транспортном средстве, и которая может быть предоставлена электромотору 31, и прогнозируемой величины электрической мощности, которая может быть восстановлена в периоде, в котором рекуперативная энергия может быть восстановлена в следующий раз, является относительно небольшой, и транспортное средство приводится в движение с помощью электромотора 31, величина электрической мощности, заряженной в аккумуляторе 41, может уменьшаться, что может мешать функциям транспортного средства. Таким образом, определяется, является ли суммарная величина, описанная выше, равной или выше первого порогового значения энергии, которое определяется как достаточная величина.
[0088] (2-4) Транспортное средство в настоящий момент движется с помощью двигателя 21 внутреннего сгорания, и первое пороговое время или более прошло с тех пор, как работа двигателя 21 внутреннего сгорания началась. Когда работа двигателя 21 внутреннего сгорания прекращается непосредственно после того, как его работа началась, пользователь может ощущать чувство неисправности двигателя 21 внутреннего сгорания или неустойчивость поведения транспортного средства, что может вызывать дискомфорт или беспокойство. Таким образом, определяется, прошло ли первое пороговое время, которое определяется как достаточное прошедшее время, которое не вызывает дискомфорт даже после того, как работа двигателя 21 внутреннего сгорания прекращается, с тех пор, как работа двигателя 21 внутреннего сгорания была начата.
[0089] Когда все результаты определения для (2-1) по (2-4) являются утвердительными, процесс переходит к этапу S105, а иначе, процесс переходит к этапу S106.
Этап S105
[0090] Блок 13 определения определяет, что режим движения должен быть установлен в режим электромотора. В настоящем варианте осуществления блок 13 определения уведомляет ECU 90 управления движением о том, что режим движения устанавливается в режим электромотора. ECU 90 управления движением инструктирует ECU 30 электромотора управлять движением с помощью электромотора 31.
[0091] В режиме электромотора рекуперативное торможение выполняется, чтобы восстанавливать кинетическую энергию транспортного средства в качестве электрической мощности. Когда пользователь нажимает педаль тормоза до большей степени, или ECU 60 помощи вождению выдает имеющую высокий приоритет инструкцию быстрого замедления, чтобы избегать столкновения, и т.д., и замедление некоторой степени или более требуется, управляющий ECU 50 и ECU 110 тормоза выполняют управление, чтобы формировать тормозное усилие с помощью тормозного устройства 111 для того, чтобы формировать достаточное тормозное усилие.
Этап S106
[0092] Блок 13 определения определяет, что режим движения должен быть установлен в режим двигателя внутреннего сгорания. В настоящем варианте осуществления блок 13 определения уведомляет ECU 90 управления движением о том, что режим движения устанавливается в режим двигателя внутреннего сгорания. ECU 90 управления движением инструктирует ECU 20 двигателя внутреннего сгорания управлять движением с помощью двигателя 21 внутреннего сгорания.
Этап S107
[0093] Блок 11 создания определяет, удовлетворяется ли условие для обновления прогнозируемой величины рекуперативной энергии. Условием для обновления является, например, то, что степень совпадения между изменением скорости с течением времени в фактическом движении до текущего времени и профиле скорости, созданном на этапе S101, ниже заданного допустимого значения. Степень совпадения может быть получена с помощью известного способа при необходимости. Например, степень совпадения может быть получена на основе интегрального значения в прошлом фиксированном периоде абсолютных значений разницы между значением скорости профиля скорости и фактическим значением скорости. Когда степень совпадения ниже допустимого значения, считается, что точность периода, в котором рекуперативная энергия может быть восстановлена, и прогнозируемая величина рекуперативной энергии также являются низкими. Когда условие для обновления удовлетворяется, процесс переходит к этапу S108, а когда условие для обновления не удовлетворяется, процесс переходит к этапу S104.
Этап S108
[0094] Блок 12 оценки обновляет период, в котором рекуперативная энергия может быть восстановлена, и прогнозируемую величину рекуперативной энергии посредством повторной оценки периода, в котором рекуперативная энергия может быть восстановлена, и прогнозируемой величины рекуперативной энергии. Способ обновления особым образом не ограничивается. Например, блок 12 оценки может выполнять модификацию, которая охватывает или распространяется на шкалу времени профиля скорости, так что степень совпадения между изменением скорости с течением времени в фактическом движении до текущего момента и профилем скорости, созданным на этапе S101, становится высокой, и может выполнять тот же процесс, что и на этапах S102 и S103, на основе профиля скорости после модификации, чтобы выполнять обновление.
[0095] Альтернативно, блок 11 создания может выполнять тот же процесс, что и на этапе S101, выбирать историю движения, отличную от истории движения, использованной для создания текущего профиля скорости, и создавать новый профиль скорости на основе истории движения. Блок 12 оценки может выполнять тот же процесс, что и на этапах S102 и S103, на основе вновь созданного профиля скорости, чтобы выполнять обновление. Например, когда транспортное средство останавливается, считается, что новая поездка должна начаться из этого местоположения в это время, и история поездки может быть выбрана тем же образом, что и на этапе S101.
[0096] Поскольку существует вероятность того, что значения вышеупомянутых факторов изменчивости изменились, корректировка может быть выполнена с помощью самого последнего значения в вышеописанном обновлении. Посредством выполнения такого обновления возможно улучшать точность оценки периода, в котором рекуперативная энергия может быть восстановлена, и прогнозируемой величины рекуперативной энергии. После периода на этом этапе процесс переходит к этапу S104.
[0097] В вышеописанном процессе устанавливаются два режима движения: режим электромотора, в котором только электромотор 31 используется для движения, и режим двигателя внутреннего сгорания, в котором только двигатель 21 внутреннего сгорания используется для движения. Как и в условии (2-3), описанном выше, когда может быть спрогнозировано, что величина рекуперативной энергии, которая должна быть восстановлена, является большой, возможности движения с помощью электромотора 31 увеличиваются, что может улучшать расход топлива, по сравнению с тем, когда прогнозируется, что величина рекуперативной энергии, которая должна быть восстановлена, является небольшой. В виду вышесказанного, прогнозируемая величина рекуперативной энергии, которая должна быть восстановлена, может также использоваться для улучшения топливной экономичности в управлении переключением между любыми двумя режимами движения среди трех режимов движения, включающих в себя режим электромотора, режим двигателя внутреннего сгорания и гибридный режим, в котором электромотор 31 и двигатель 21 внутреннего сгорания, оба используются для движения, и в управлении переключением между тремя режимами движения.
[0098] Например, когда может быть спрогнозировано, что величина рекуперативной энергии, которая должна быть восстановлена, является большой, возможности переключения из режима двигателя внутреннего сгорания в гибридный режим могут быть увеличены, или возможности переключения из гибридного режима в режим электромотора могут быть увеличены по сравнению с тем, когда прогнозируется, что величина рекуперативной энергии, которая должна быть восстановлена, является небольшой.
Результат
[0099] Устройство 10 управления движением согласно настоящему варианту осуществления может количественно прогнозировать величину рекуперативной энергии, которая должна быть восстановлена, на ранней стадии с помощью профиля скорости, в котором прогнозируется скорость транспортного средства. Является возможным выполнять подходящее управление движением с помощью спрогнозированного результата. То есть, когда может быть спрогнозировано, что величина рекуперативной энергии, которая должна быть восстановлена, является большой, возможно увеличивать возможности движения с помощью электромотора 31 и улучшать топливную экономичность, по сравнению с тем, когда прогнозируется, что величина рекуперативной энергии, которая должна быть восстановлена, является небольшой.
[0100] Устройство 10 управления движением может сдерживать число параметров для вычисления прогнозируемой величины рекуперативной энергии, которая должна быть восстановлена, посредством аппроксимации профиля скорости с помощью гауссовых функций, и может сдерживать объем вычислений, ссылаясь на числовую таблицу, включающую в себя гауссовы функции, которая подготавливается заранее.
[0101] Поскольку устройство 10 управления движением может создавать профиль скорости на основе истории движения пользователя и истории движения другого пользователя, возможно оценивать прогнозируемую величину рекуперативной энергии, которая должна быть восстановлена, даже когда пользователь не задал маршрут движения. Когда пользователь задает маршрут движения, профиль скорости может быть создан с помощью маршрута движения, и точность оценки может быть улучшена.
[0102] Поскольку устройство 10 управления движением корректирует прогнозируемую величину на основе переменных факторов, которые считаются влияющими на величину рекуперативной энергии, которая должна быть восстановлена, точность оценки может быть улучшена посредством объединения переменных факторов.
[0103] Когда степень совпадения между профилем скорости и фактическим изменением в скорости транспортного средства с течением времени является низкой, устройство 10 управления движением оценивает прогнозируемую величину восстановления снова, и, таким образом, точность оценки может быть улучшена.
[0104] Когда определяется режим движения, устройство 10 управления движением определяет, какой из двигателя 21 внутреннего сгорания и электромотора 31 подходит, принимая во внимание способность заряда рекуперативной энергии, эффективность работы и возможность реализации требуемой мощности на основе степени заряда аккумулятора 41, скорости транспортного средства и требуемой мощности, также как прогнозируемой величины рекуперативной энергии, которая должна быть восстановлена. Таким образом, является возможным улучшать определенность и устойчивость управления транспортным средством.
[0105] Хотя вариант осуществления изобретения был описан выше, изобретение может быть модифицировано и реализовано соответствующим образом. Изобретение может рассматриваться как устройство управления движением, способ управления движением, который исполняется посредством устройства управления движением, включающего в себя процессор и память, программа управления движением, компьютерно-читаемый энергонезависимый носитель данных, который хранит программу управления движением, и транспортное средство, оборудованное устройством управления движением.
[0106] Изобретение является полезным для устройства управления движением, которое устанавливается на транспортном средстве или т.п.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВРАЩАЮЩИМИСЯ ЭЛЕКТРИЧЕСКИМИ МАШИНАМИ | 2015 |
|
RU2689075C2 |
| СПОСОБ УПРАВЛЕНИЯ РЕЛЬСОВЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2010 |
|
RU2522532C2 |
| СИСТЕМА УПРАВЛЕНИЯ СИДЕНЬЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2021 |
|
RU2838236C1 |
| УСТРОЙСТВО РАСЧЕТА КОЭФФИЦИЕНТА ЗАМЕДЛЕНИЯ | 2011 |
|
RU2565852C1 |
| УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2011 |
|
RU2572780C2 |
| ОБОРУДОВАНИЕ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА В АВАРИЙНОМ РЕЖИМЕ | 2019 |
|
RU2706754C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖУЩЕЙ СИЛОЙ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2575327C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2673581C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2690296C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ОПТИМИЗАЦИИ ЭНЕРГОПОТРЕБЛЕНИЯ В ТРАНСПОРТНОМ СРЕДСТВЕ | 2014 |
|
RU2640919C2 |

Группа изобретений относится к системам управления для гибридных транспортных средств. Устройство управления движением, установленное на транспортном средстве, содержащем электромотор и двигатель внутреннего сгорания в качестве источника мощности, содержит блок создания, блок оценки и блок определения. При этом блок создания выполнен с возможностью создания профиля скорости, в котором прогнозируется скорость транспортного средства в каждый момент времени. Блок оценки выполнен с возможностью аппроксимирования профиля скорости с помощью заданной модели аппроксимации и оценивания прогнозируемой величины рекуперативной энергии на основе результата аппроксимации. Блок определения выполнен с возможностью определения источника мощности, подлежащего использованию для движения, на основе прогнозируемой величины рекуперативной энергии. Также заявлены способ управления движением и энергонезависимый носитель данных, который хранит программу управления движением. Технический результат заключается в улучшении топливной экономичности гибридного транспортного средства. 3 н. и 8 з.п. ф-лы, 9 ил.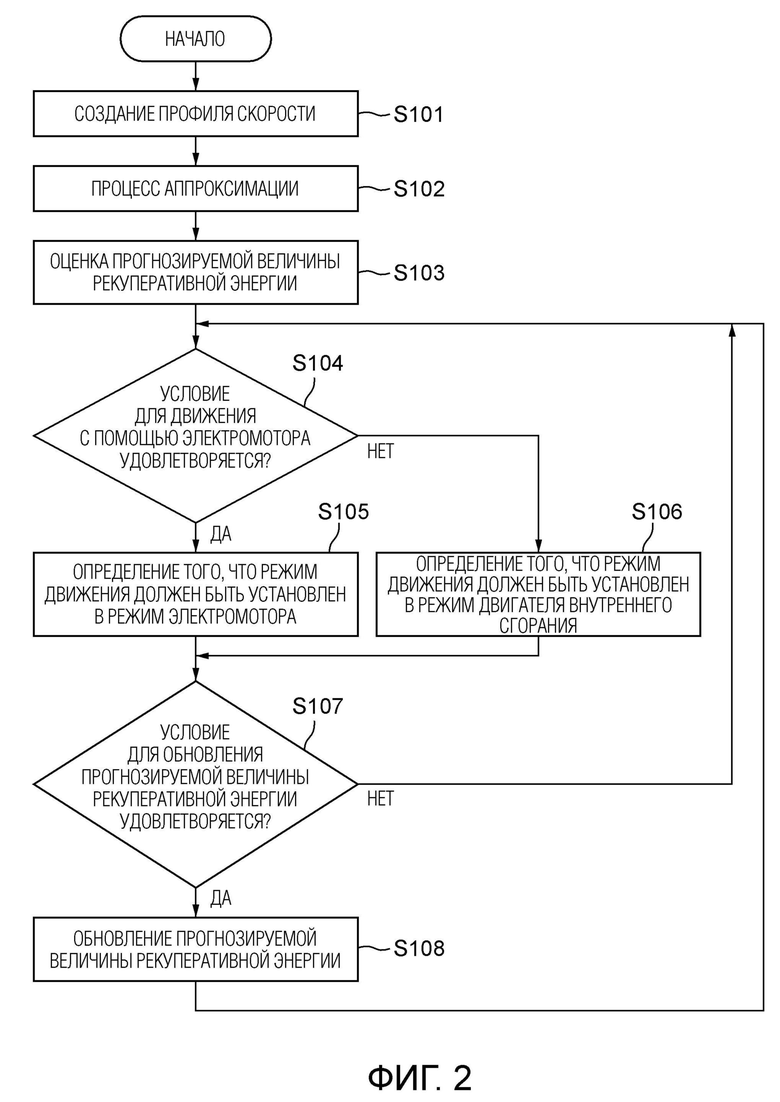
1. Устройство управления движением, установленное на транспортном средстве, включающем в себя электромотор и двигатель внутреннего сгорания в качестве источника мощности, при этом устройство управления движением содержит:
блок создания, выполненный с возможностью создания профиля скорости, в котором прогнозируется скорость транспортного средства в каждый момент времени;
блок оценки, выполненный с возможностью аппроксимирования профиля скорости с помощью заданной модели аппроксимации и оценивания прогнозируемой величины рекуперативной энергии на основе результата аппроксимации, причем рекуперативная энергия является энергией, которая получается за счет рекуперативного торможения электромотора; и
блок определения, выполненный с возможностью определения источника мощности, подлежащего использованию для движения, на основе прогнозируемой величины рекуперативной энергии.
2. Устройство управления движением по п. 1, в котором блок создания выполнен с возможностью создания профиля скорости на основе истории движения пользователя и/или истории движения другого пользователя.
3. Устройство управления движением по п. 1 или 2, в котором заданная модель аппроксимации выполнена с возможностью использования модели, которая аппроксимирует изменение скорости транспортного средства по времени, которое указывается в профиле скорости с помощью суммы гауссовых функций, имеющих различные пиковые позиции.
4. Устройство управления движением по п. 3, в котором блок оценки выполнен с возможностью получения, на основе результата аппроксимации, мощности, указанной суммой мощности, которая способствует изменению кинетической энергии транспортного средства, и мощности, которая рассеивается посредством сопротивления движению, и рассмотрения интегрированного по времени значения величины мощности в течение периода в качестве оценочного значения прогнозируемой величины рекуперативной энергии, подлежащей восстановлению, при этом период является одним или более периодами, в которых мощность является отрицательной, и периодом, в котором рекуперативная энергия может восстанавливаться.
5. Устройство управления движением по п. 4, в котором блок оценки выполнен с возможностью оценивания прогнозируемой величины рекуперативной энергии дополнительно на основе одного или более факторов изменчивости.
6. Устройство управления движением по п. 5, в котором факторы изменчивости являются, по меньшей мере, одним из типа поверхности дороги, уклона поверхности дороги, весовой нагрузки транспортного средства и погоды.
7. Устройство управления движением по п. 5 или 6, в котором блок оценки выполнен с возможностью корректирования мощности на основе факторов изменчивости.
8. Устройство управления движением по п. 5 или 6, в котором блок оценки выполнен с возможностью корректирования интегрированного по мощности значения на основе факторов изменчивости.
9. Устройство управления движением по любому из пп. 4-6, в котором блок определения выполнен с возможностью определения того, что электромотор подлежит использованию для движения, когда удовлетворяется условие, включающее в себя то, что суммарная величина энергии для электромотора, которая в настоящее время заряжена в транспортное средство, и прогнозируемой величины рекуперативной энергии в следующем периоде равна или превышает пороговое значение.
10. Способ управления движением, выполняемый посредством устройства управления движением, установленным на транспортном средстве, включающем в себя электромотор и двигатель внутреннего сгорания в качестве источника мощности, при этом способ управления движением включает этапы, на которых:
создают профиль скорости, в котором прогнозируется скорость транспортного средства в каждый момент времени;
аппроксимируют профиль скорости с помощью заданной модели аппроксимации и оценивают прогнозируемую величину рекуперативной энергии на основе результата аппроксимации, причем рекуперативная энергия является энергией, которая получается за счет рекуперативного торможения электромотора; и
определяют источник мощности, используемый для движения, на основе прогнозируемой величины рекуперативной энергии.
11. Энергонезависимый носитель данных, который хранит программу управления движением, которая инструктирует компьютеру устройства управления движением, которое установлено на транспортном средстве, включающем в себя электромотор и двигатель внутреннего сгорания в качестве источника мощности, выполнять следующие функции:
создание профиля скорости, в котором прогнозируется скорость транспортного средства в каждый момент времени;
аппроксимацию профиля скорости с помощью заданной модели аппроксимации и оценку прогнозируемой величины рекуперативной энергии на основе результата аппроксимации, причем рекуперативная энергия является энергией, которая получается за счет рекуперативного торможения электромотора; и
определение источника мощности, используемого для движения, на основе прогнозируемой величины рекуперативной энергии.
| US 9637111 B2, 02.05.2017 | |||
| WO 2014158846 A1, 02.10.2014 | |||
| WO 2018104850 A1, 14.06.2018 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ ИЗМЕНЕНИЕМ РЕЖИМА ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2653944C1 |

