УРОВЕНЬ ТЕХНИКИ
[0001] Когда транспортное средство меняет свою полосу движения для вождения, часто есть риск столкновения с объектом, например, другим транспортным средством. Водитель транспортного средства может инициировать смену полосы движения, без распознавания или попытки уменьшить риск столкновения, например, другое транспортное средство находится в слепой зоне водителя. В другом примере водитель транспортного средства может инициировать смену полосы движения, даже не пытаясь удостовериться, что смена полосы движения безопасна.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
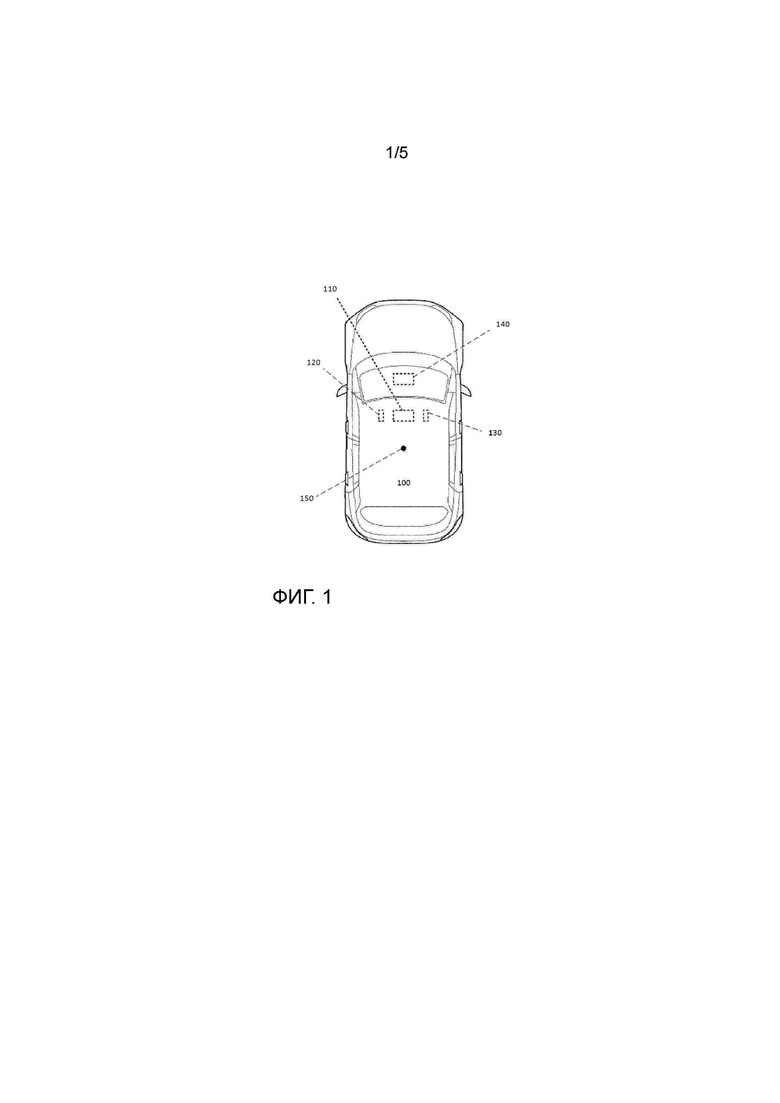
[0002] Фиг. 1 - схема, иллюстрирующая примерное транспортное средство.
[0003] Фиг. 2 - схема, показывающая пример множественных транспортных средств, едущих по множественным полосам движения.
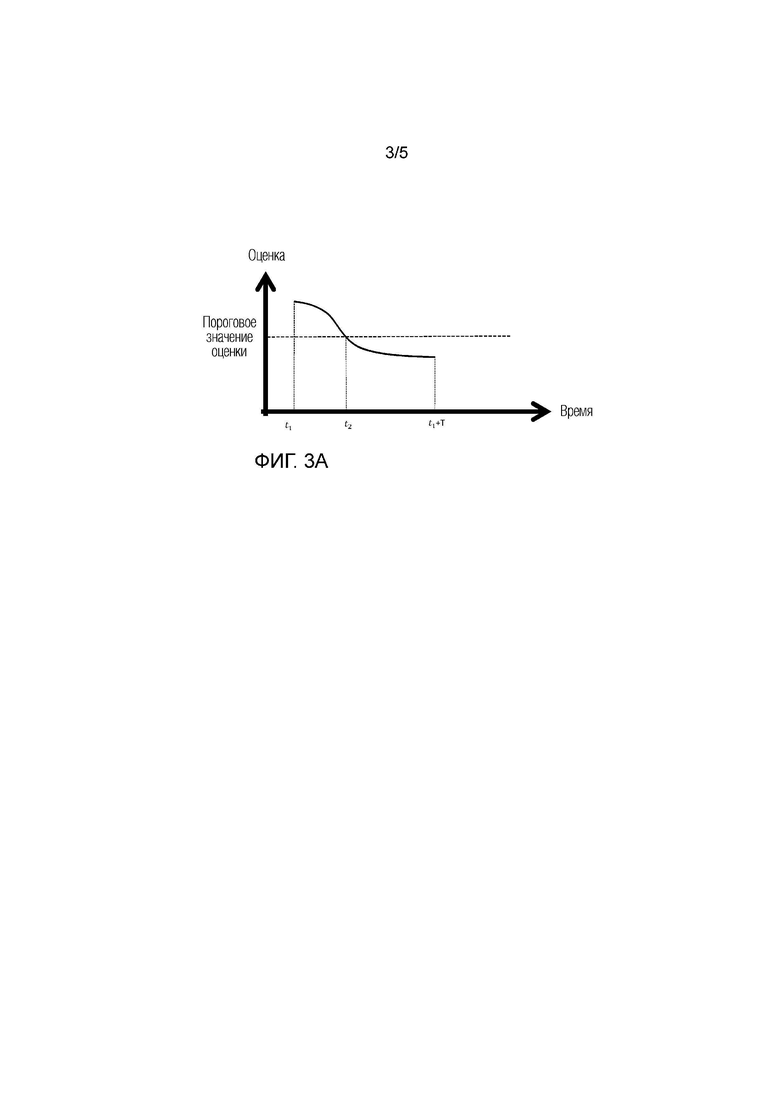
[0004] Фиг. 3 - примерный график определенных оценок для смены полосы движения транспортного средства по фиг. 1.
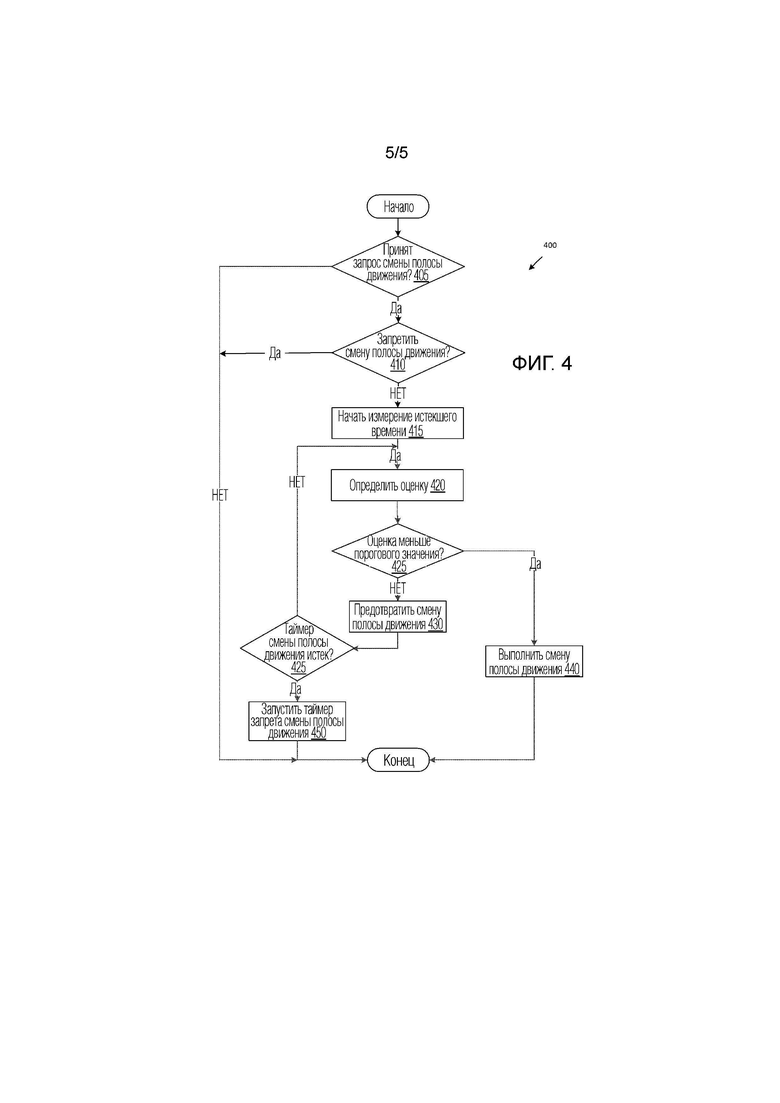
[0005] Фиг. 4 - блок-схема последовательности операций примерного процесса для смены полосы движения.
ПОДРОБНОЕ ОПИСАНИЕ
ВВЕДЕНИЕ
[0006] Со ссылкой на фиг. 1-2, компьютер 110 запрограммирован определять оценку для смены полосы движения главного транспортного средства 100, которая должна быть выполнена в пределах предопределенного времени. При определении, что оценка является меньшей, чем предопределенное пороговое значение в пределах предопределенного времени, компьютер 110 может затем приводить в действие компоненты транспортного средства 100 для выполнения смены полосы движения. Транспортное средство 100 может указываться ссылкой как первое или главное транспортное средство, а транспортное средство 200, иное, чем главное транспортное средство 100, может указываться ссылкой как второе транспортное средство 200a, 200b, 200c.
ПРИМЕРНЫЕ ЭЛЕМЕНТЫ СИСТЕМЫ
[0007] Фиг. 1 иллюстрирует транспортное средство 100. Транспортное средство 100 может снабжаться двигательной энергией многообразием известных способов, например, электродвигателем и/или двигателем внутреннего сгорания. Транспортное средство 100 может быть наземным транспортным средством, таким как легковой автомобиль, грузовой автомобиль, и т. д. Транспортное средство 100 может включать в себя компьютер 110, исполнительный механизм(ы) 120, датчик(и) 130 и пользовательский интерфейс 140. Транспортное средство 100 имеет точку 150 геометрического центра, например, точку, в которой пересекаются соответственные продольная и поперечная центральные линии транспортного средства 100.
[0008] Компьютер 110 включает в себя процессор и память, такие как известные. Память включает в себя одну или более форм машинно-читаемых носителей и хранит инструкции, исполняемые компьютером 110, для выполнения различных операций, в том числе, как раскрытые в материалах настоящей заявки.
[0009] Компьютер 110 может оперировать соответственным транспортным средством 100 в автономном или полуавтономном режиме. В целях данного раскрытия, автономный режим определен в качестве режима, в котором каждое из силовой установки 100 транспортного средства, тормозов и рулевого механизма управляются компьютером 110; в полуавтономном режиме компьютер 110 управляет одним или двумя из силовой установки транспортного средства 100, тормозов и рулевого механизма транспортного средства 100.
[0010] Компьютер 110 может включать в себя программы для оперирования одним или более из тормозов транспортного средства, силовой установки (например, управления ускорением в транспортном средстве посредством управления одним или более из двигателя внутреннего сгорания, электродвигателя, гибридного двигателя, и т. д.), рулевого механизма, климатического контроля, внутренних и/или наружных фонарей, и т. д., так же как и для определения, должен ли и когда компьютер 110, в противоположность человеку-оператору, управлять такими операциями. Дополнительно, компьютер 110 может быть запрограммирован определять, должен ли и когда человек-оператор должен управлять такими операциями.
[0011] Компьютер 110 может включать в себя или быть присоединенным с возможностью связи, например, через шину связи транспортного средства 100, как дополнительно описано ниже, к более чем одному процессору, например, контроллерам, или тому подобному, включенным в состав транспортного средства, для контроля и/или управления различными контроллерами транспортного средства, например, контроллеру силовой передачи, контроллеру тормозов, контроллеру рулевого механизма, и т. д. Компьютер 110 как правило скомпонован для связи по сети связи транспортного средства, которая может включать в себя шину в транспортом средстве, такую как локальная сеть контроллеров (CAN), или тому подобную, и/или другие проводные и/или беспроводные механизмы.
[0012] Через сеть транспортного средства 100 компьютер 110 может передавать сообщения на различные устройства в транспортном средстве и/или принимать сообщения от различных устройств, например, исполнительного механизма 120, пользовательского интерфейса 140, т. д. В качестве альтернативы или дополнительно, в случаях, где компьютер 110 фактически содержит множественные устройства, сеть связи транспортного средства 100 может использоваться для связи между устройствами, представленными в качестве компьютера 110 в данном раскрытии. Дополнительно, как упомянуто ниже, различные контроллеры и/или датчики могут выдавать данные в компьютер 110 через сеть связи транспортного средства.
[0013] В дополнение компьютер 110 может быть сконфигурирован для связи через интерфейс беспроводной связи транспортное средство – транспортное средство (V2V) с другими транспортными средствами 200, например, через сеть связи транспортное средство – транспортное средство. Сеть связи V2V представляет собой один или более механизмов, посредством которых компьютеры 110 транспортных средств 100 могут осуществлять связь с другими транспортными средствам 200, и может быть одним или несколькими механизмами беспроводной связи, в том числе, любой желаемой комбинацией беспроводных (например, сотовых, беспроводных, спутниковых, микроволновых или радиочастотных) механизмов связи и любой желаемой топологией сети (или топологий, когда используются множественные механизмы связи). Примерные сети связи V2V включают в себя сотовые, Bluetooth, IEEE 802.11, специализированные связи ближнего действия (DSRC) и/или глобальные сети (WAN), в том числе, сеть Интернет, обеспечивающие услуги передачи данных.
[0014] Исполнительные механизмы 120 транспортного средства 100 реализованы посредством схем, микросхем или других электронных и/или механических компонентов, которые могут приводить в действие различные подсистемы транспортного средства в соответствии с соответствующими сигналами управления, как известно. Исполнительные механизмы 120 могут использоваться для управления тормозами, ускорением и рулевым механизмом транспортных средств 100. Например, в полуавтономном режиме, компьютер 110 может приводить в действие исполнительный механизм 120 рулевого управления для смены полосы движения транспортного средства по приему запроса пользователя от человека-оператора сменить полосу движения (смотрите фиг. 2).
[0015] Датчики 130 могут включать в себя многообразие известных устройств для выдачи данных в компьютер 110. Например, датчики 130 могут включать в себя датчик(и) 130 с устройством оптического обнаружения и определения дальности объекта (лазерным локатором, LIDAR), расположенный на верху транспортного средства 100, который выдает относительные расположения, размеры и формы вторых транспортных средств 200, окружающих транспортное средство 100, в том числе вторых транспортных средств 200, движущихся рядом с или за транспортным средством 100 (смотрите фиг. 2). В качестве еще одного примера, один или более радарных датчиков 130, прикрепленных к бамперам транспортного средства 100, могут выдавать расположения вторых транспортных средств 200, передвигающихся спереди и/или сзади от транспортного средства 100, относительно расположения транспортного средства 100. Датчики 130 могут включать в себя датчик(и) 130 камеры, например, переднего обзора, бокового обзора, и т. д., обеспечивая изображения из области, окружающей транспортное средство 110. Например, компьютер 110 может быть запрограммирован принимать данные изображения от датчика(ов) 130 камеры и реализовывать технологии обработки изображений для обнаружения элемента(ов) 220 разметки полосы движения, полос(ы) 210a, 210b, 210c движения и других объектов, таких как транспортные средства 200. Компьютер 110 может быть дополнительно запрограммирован определять текущую полосу 210a движения для вождения транспортного средства 100, например, на основании координат GPS и/или обнаруженных элементов 220 разметки полосы движения. На основании данных, принятых от датчиков 130, компьютер 110 может определять относительное расстояние, скорость, и т. д., других транспортных средств 200 относительно транспортного средства 100. В качестве еще одного примера, компьютер 110 может быть запрограммирован принимать данные, включающие в себя относительную скорость, координаты расположения и/или направление других транспортных средства 200 через сеть беспроводной связи. Например, компьютер 110 может принимать такие данные от датчиков GPS, размещенных в других транспортных средствах 200, которые выдают географические координаты, направление движения, и т. д. вторых транспортных средств 200.
[0016] Устройство(а) 140 пользовательского интерфейса может быть выполнено с возможностью принимать информацию от пользователя, такого как человек-оператор, во время работы транспортного средства. Более того, устройство 140 пользовательского интерфейса может быть выполнено с возможностью представлять информацию пользователю. Таким образом, устройство 140 пользовательского интерфейса может быть расположено в пассажирском отделении транспортного средства 100. Например, устройство(а) 140 пользовательского интерфейса может включать в себя переключатель сигналов поворота. В примерном неавтономном режиме, компьютер 110 может принимать запрос сменить полосу 210 движения, например, сигнал левого поворота, для указания намерения пользователя транспортного средства 100 сменить текущую полосу 210a движения на целевую полосу 210b движения. В примерном полуавтономном режиме, компьютер 110 может быть запрограммирован выполнять смену полосы движения по приему запроса от пользователя, например, через переключатель сигналов поворота. Другими словами, компьютер 110 может быть запрограммирован выполнять смену полосы движения, но только если пользователь транспортного средства 100 запрашивает смену текущей полосы 210a движения.
[0017] Далее со ссылкой на фиг. 2 и 3A компьютер 110 транспортного средства 100 может быть запрограммирован определять оценку запрошенной или возможной смены полосы движения главного транспортного средства 100, например, с полосы 210a движения на полосу 210b движения, которая должна быть выполнена в пределах предопределенного времени T, например, 10 секунд (смотрите фиг. 3A). По определению, что оценка является меньшей, чем предопределенное пороговое значение, в пределах предопределенного времени T, например, в момент t2 времени, компьютер 110 затем приводит в действие компоненты транспортного средства 100, например, исполнительный механизм 120 рулевого управления, для выполнения смены полосы движения.
[0018] Например, компьютер 110 может выполнять смену полосы движения, выводя инструкции на исполнительный механизм(ы) 120 рулевого управления транспортного средства 100, для поперечного перемещения из текущей полосы 210a движения в полосу 210b движения. В одном примере, компьютер 110 может определять инструкцию для исполнительного механизма(ов) 120 рулевого управления на основании данных, принятых от датчиков 130 транспортного средства 100, других транспортных средств 200 через сеть беспроводной связи, удаленного компьютера, и т. д. Инструкция для исполнительного механизма(ов) 120 рулевого управления может включать в себя изменение угла поворота руля, например, 30 градусов, значение крутящего момента, например, 1 Нм (Ньютон-метр), и/или значение электрического тока, например, 1 Ампер. Дополнительно или в качестве альтернативы, компьютер 110 может приводить в действие сигналы поворота транспортного средства 100 и/или выводить данные через интерфейс сети беспроводной связи транспортного средства 100 для указания смены полосы 210 движения главного транспортного средства 100 в другое транспортное средство(а) 200. Выведенные данные из транспортного средства 100 через беспроводную сеть могут, например, включать в себя идентификатор транспортного средства 100, текущую полосу 210a движения, целевую полосу 210b движения, ожидаемую временную длительность операции смены полосы движения, например, 4 секунды, и/или скорость транспортного средства 100. Дополнительно, компьютер 110 может быть запрограммирован выключать фонари сигналов поворота транспортного средства 100 по завершению смены полосы движения. Например, компьютер 110 может определять, что смена полосы движения завершена, когда местоположение транспортного средства 100, например, на основании координат GPS и данных карты, определено находящимся в пределах предопределенного расстояния, например, 50 см, от середины целевой полосы 210b движения, такой как виртуальная линия, расположенная параллельно и посередине от соседних элементов 220 разметки полосы движения по обеим сторонам полосы 210b движения.
[0019] В одном из примеров компьютер 110 может быть запрограммирован определять оценку по приему запроса пользователя в момент t1 времени, указывающего смену полосы движения. Запрос пользователя может включать в себя ввод в действие переключателя сигналов поворота транспортного средства 100. В другом примере запрос пользователя может включать в себя входные данные, принятые из пользовательского ввода 140 экрана касания, речевую команду, например, «перейти в соседнюю левую полосу движения». В другом примере компьютер 110 может определять целевую полосу 210b движения на основании текущей полосы 210a движения и запроса пользователя, указывающего переход на одну полосу движения влево. В одном из примеров по приему пользовательского ввода компьютер 110 может быть запрограммирован периодически, например, каждые 50 миллисекунд, определять оценку за предопределенное время T. Другими словами, компьютер 110 продолжает оценивать операцию смены полосы движения от момента t1 до t1+T периодически. Здесь следует отметить, что графики оценок, показанные на фиг. 3A-3B, предназначены только для иллюстративных целей, и значение оценки может определяться на основании какой-либо периодической или непериодической частоты.
[0020] Оценка, в то время как такой термин используется в материалах настоящей заявки, является значением, например, задана числом, указывающим риск столкновения с другим объектом или другим транспортным средством 200. В одном из примеров, оценка может быть назначена одной из множества дискретных категорий, таких как «низкий», «средний», «высокий» и «неизбежный» риск. Например, пороговое значение оценки может быть категоризировано в качестве «среднего», то есть, компьютер 110 может приводить в действие исполнительные механизмы 120 транспортного средства 100 для выполнения смены полосы движения, если оценка является «низкой», то есть, меньшей, чем «среднее» пороговое значение оценки. В другом примере оценка может быть определена в виде числового значения в процентах между 0% и 100%. Например, компьютер 110 может приводить в действие исполнительные механизмы 120 транспортного средства 100 для выполнения смены полосы движения, когда оценка, например, 20%, является меньшей, чем пороговое значение оценки, например, 30%.
[0021] Компьютер 110 может определять оценку с использованием различных методик. В одном примере компьютер 110 может определять оценку, идентифицируя целевую полосу 210 движения, например, полосу 210b движения. Компьютер 110 может затем обнаруживать, например, транспортные средства 200a, 200b, 200c и определять оценку на основании, по меньшей мере, частично обнаруженных транспортных средств 200a, 200b, 200c. Например, компьютер 110 может определять оценку на основании скорости, ускорения и/или замедления транспортных средств 200a, 200b. В одном примере компьютер 110 может определять оценку, оценивая риск столкновения транспортного средства 100 с одним из вторых транспортных средств 200a, 200b, когда транспортное средство 100 перемещается поперечно в зону между транспортными средствами 200a, 200b в полосе 210b движения. Дополнительно или в качестве альтернативы компьютер 110 может определять оценку на основании данных, принятых от датчиков 130 транспортного средства 100, связи V2V, и т. д., указывающих, намеревается ли второе транспортное средство 200c перейти в полосу 210b движения, например, область между вторыми транспортными средствами 200a, 200b.
[0022] В другом примере компьютер 110 может быть запрограммирован определять оценку на основании изгиба полосы 210 движения. Например, компьютер 110 может определять «высокую» оценку риска, как предложено в примере приведенном выше, когда радиус изгиба полосы 210 движения является меньшим, чем 250 метров. Дополнительно или в качестве альтернативы компьютер 110 может определять оценку на основании, по меньшей мере, частично ограничений движения транспорта, например, «высокий» риск может определяться для участков дороги с ограничениями смены полосы движения. В одном примере компьютер 110 определяет ограничения движения транспорта на основании, например, данных изображения, принятых от датчиков 130 камеры транспортного средства 100, в том числе изображений дорожных знаков, данных карты, принятых через сеть беспроводной связи, и т. д. Дополнительно или в качестве альтернативы компьютер 110 может определять оценку на основании, по меньшей мере, частично погодных условий, например, скользкой дороги, ненастных погодных условий, и т. д. Дополнительно или в качестве альтернативы компьютер 110 может определять оценку на основании, по меньшей мере, частично условий наружного освещения, например, более низкая оценка может определяться во время дневного света. В качестве другого примера компьютер 110 может определять оценку на основании комбинации различных параметров, таких как координаты расположения, скорость, ускорение, и т. д., других транспортных средств 200, погодные условия, условия наружного освещения, ограничения движения транспорта, и т. д.
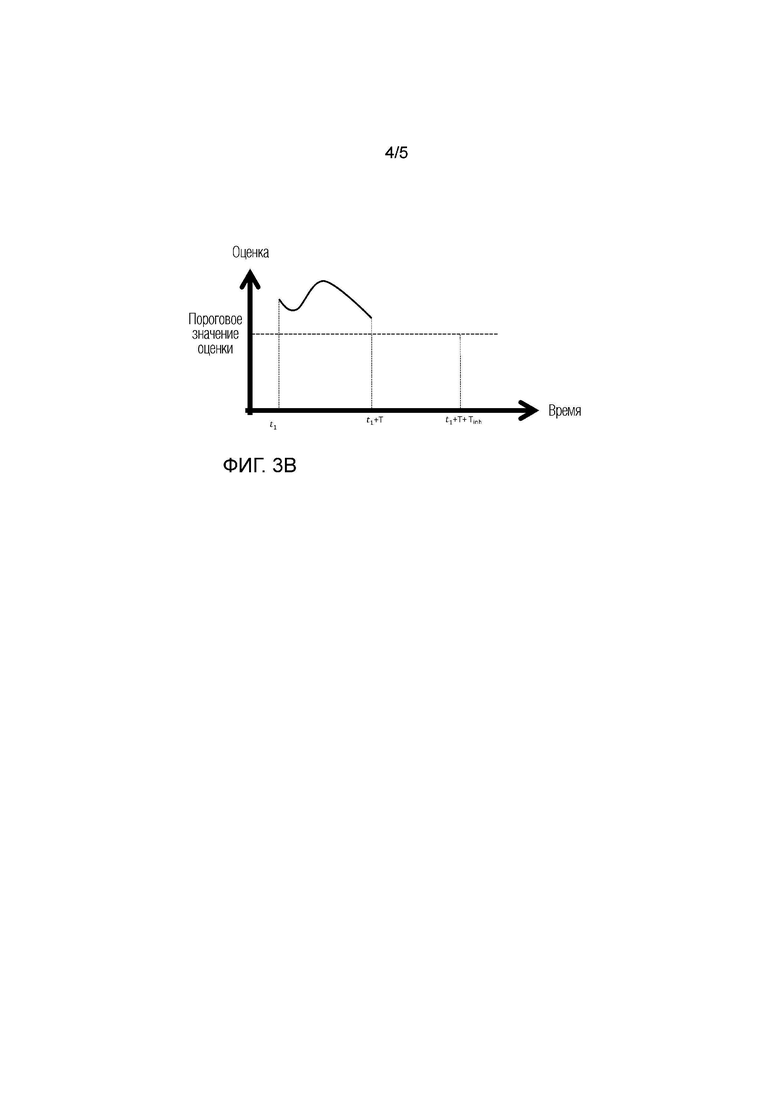
[0023] Со ссылкой на фиг. 2 и 3B компьютер 110 может быть запрограммирован предотвращать смену полосы движения по определению, что оценка превышает предопределенное пороговое значение. Например, как показано на фиг. 3B, компьютер 110 может принимать запрос пользователя на смену полосы движения в t1. Однако, определенная оценка находится выше порогового значения в пределах всего предопределенного времени T, например, от t1 до t1+T. Таким образом, компьютер 110 может предотвращать смену полосы движения. Дополнительно или в качестве альтернативы компьютер 110 может быть запрограммирован игнорировать (или запрещать) запрос пользователя на смену полосы движения, например, на Tinh секунд, после окончания предопределенного времени T по определению, что оценка превышает предопределенное пороговое значение в течение предопределенного времени T. В качестве одного примера по фиг. 3B, компьютер 110 запрещает смену полосы движения от t1+T до t1+T+Tinh по определению, что оценка находилась выше порогового значения в течение всего времени от t1+T до t1+T. Другими словами, компьютер 110 может игнорировать любой запрос пользователя на смену полосы движения, принятый в течение времени от t1+T до t1+T+Tinh.
ОБРАБОТКА
[0024] Фиг. 4 - блок-схема последовательности операций примерного процесса 400 для смены полосы движения. Этапы процесса 400, описанного ниже в качестве исполняемого в компьютере 110 первого транспортного средства 100, альтернативно или дополнительно могли бы исполняться в одном или более других вычислительных устройств, например, удаленном или «облачном» компьютере.
[0025] Процесс 400 операций начинается на этапе 405, на котором компьютер 110 определяет, принят ли запрос пользователя на смену полосы движения, например, от переключателя сигналов поворота. Принятый запрос пользователя может включать в себя направление смены полосы движения, например, вправо или влево, и/или целевую полосу 210 движения, например, полосу 210c движения. Если компьютер 110 определяет, что запрос пользователя на смену полосы движения был принят, то процесс 400 переходит на этап 410; иначе, процесс 400 заканчивается или, в качестве альтернативы, процесс 400 возвращается на этап 405 принятия решения.
[0026] На этапе 410 принятия решения, компьютер 110 определяет, должна ли быть запрещена смена полосы движения. Например, как обсуждено выше со ссылкой на фиг. 3B, смена полосы движения может быть запрещена или предотвращена на предопределенное время Tinh, начиная с t1+T, по определению, что оценка находилась выше порогового значения во временном интервале от t1 до t1+T после того, как предыдущий запрос пользователя был принят в момент t1 времени. Если компьютер 110 определяет, что смена полосы движения должна быть запрещена, то процесс 400 заканчивается или, в качестве альтернативы, возвращается на этап 405 принятия решения; иначе, процесс 400 переходит на этап 415.
[0027] На этапе 415 компьютер 110 начинает сравнение истекшего времени от момента t1 времени до предопределенного времени T смены полосы движения. Например, когда запрос пользователя может быть принят в момент t1 времени, а затем, время смены полосы движения продолжается от t1 до t1+T. Дополнительно, компьютер 110 определяет оценку для смены полосы движения периодически, например, каждые 50 миллисекунд.
[0028] Затем, на этапе 420 компьютер определяет оценку запрошенной смены полосы движения. В одном примере компьютер 110 запрограммирован обнаруживать другое транспортное средство(а) 200 и/или объекты в других полосах 210 движения, например, транспортные средства 200a, 200b в полосе 210b движения, транспортное средство 200c в полосе 210c движения, и т. д. Компьютер 110 затем оценивает смену полосы движения на основании, по меньшей мере, частично обнаруженных транспортных средств 200 и/или объектов. В еще одном примере компьютер 110 оценивает запрошенную смену полосы движения на основании, по меньшей мере, частично ограничений движения транспорта, изгиба полос 210 движения, и т. д.
[0029] Затем на этапе 425 принятия решения компьютер 110 определяет, является ли оценка для смены полосы движения меньшей, чем пороговое значение оценки, например, как описано выше. Если компьютер 110 определяет, что определенная оценка, например, 20%, является меньшей, чем пороговое значение оценки, то процесс 400 переходит на этап 440; иначе, процесс 400 переходит на этап 430 принятия решения.
[0030] На этапе 430 компьютер 110 предотвращает смену полосы движения. В одном примере, если водитель транспортного средства 100 прикладывает крутящий момент к рулевому колесу транспортного средства, чтобы побудить транспортное средство 100 покинуть текущую полосу движения 210a, то компьютер 110 прикладывает крутящий момент в противоположном направлении посредством исполнительного механизма 120 транспортного средства 100 для предотвращения выезда из полосы движения. Дополнительно или в качестве альтернативы, компьютер 110 может вводить в действие исполнительный механизм 120 рулевого управления транспортного средства 100, чтобы сохранять полосу 210a движения транспортного средства 100, например, на основании поперечного положения транспортного средства 100 относительно обнаруженных элементов 220 разметки полосы движения. В другом примере компьютер 110 может расцеплять механическое соединение рулевого колеса транспортного средства 100 и колес транспортного средства 100, чтобы предотвращать смену полосы движения, вызванную крутящим моментом, приложенным, например, пользователем к рулевому колесу транспортного средства 100.
[0031] На этапе 440 компьютер 110 выполняет смену полосы движения, например, приводя в действие исполнительные механизмы 120 рулевого управления транспортного средства 100. Компьютер 110 может быть запрограммирован перемещать транспортное средство 100 из текущей полосы 210a движения в целевую полосу 210b движения. Дополнительно, компьютер 110 может быть запрограммирован вводить в действие фонари сигналов поворота транспортного средства для указания смены полосы движения и/или указывать смену полосы движения, выводя данные через интерфейс сети беспроводной связи транспортного средства 100.
[0032] На этапе 445 принятия решения, достигнутой, так как оценка риска не была меньше, чем предопределенное пороговое значение, и компьютер 110, таким образом, определил, что он не может выполнить смену полосы движения, на этапе 425 компьютер 110 определяет, истекло ли время T смены полосы движения. Например, время смены полосы движения истекает после достижения момента t1+T времени, как обсуждено выше. Если компьютер 110 определяет, что время T смены полосы движения истекло, процесс 400 операций переходит на этап 450; иначе, процесс 400 возвращается на этап 420 принятия решения.
[0033] На этапе 450 компьютер 110 начинает время Tinh запрета смены полосы движения. В одном примере время запрета продолжается от t1+T до t1+T+Tinh. Вслед за этапом 450 процесс 400 может заканчиваться или, в качестве альтернативы, возвращаться на этап 405принятия решения.
[0034] Каждое из вычислительных устройств, как описано в материалах настоящей заявки, включает в себя инструкции, исполняемые одним или несколькими вычислительными устройствами, такими как идентифицированные выше, и для выполнения вершин блок-схем или этапов процессов, описанных выше. Машинно-исполняемые инструкции могут компилироваться или интерпретироваться из компьютерных программ, созданных с использованием многообразия языков и/или технологий программирования, в том числе, но не в качестве ограничения, и в одиночку или в комбинации, Java™, C, C++, Visual Basic, Java Script, Perl, HTML, и т. д. Вообще, процессор (например, микропроцессор) принимает инструкции, например, из памяти, машинно-читаемого носителя, и т. д., и исполняет эти инструкции, тем самым, выполняя один или несколько процессов, в том числе, один или несколько процессов, описанных в материалах настоящей заявки. Такие инструкции и другие данные могут храниться и передаваться с использованием многообразия машинно-читаемых носителей. Файл в вычислительном устройстве, в основном, является совокупностью данных, хранимых на машинно-читаемом носителе, таком как запоминающий носитель, оперативное запоминающее устройство, и т. д.
[0035] Машинно-читаемый носитель включает в себя любой носитель, который принимает участие в предоставлении данных (например, инструкций), которые могут считываться компьютером. Такой носитель может принимать многие формы, в том числе, но не в качестве ограничения, энергонезависимых носителей, энергозависимых носителей, и т. д. Энергонезависимые носители включают в себя, например, оптические или магнитные диски и другую постоянную память. Энергозависимые носители включают в себя динамическое оперативное запоминающее устройство (DRAM), которое типично составляет основную память. Обычные формы машинно-читаемых носителей включают в себя, например, дискету, гибкий диск, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM (постоянное запоминающее устройство (ПЗУ) на компакт-диске), DVD (цифровой многофункциональный диск), любой другой оптический носитель, перфокарты, бумажную ленту, любой другой физический носитель со схемами расположения отверстий, ОЗУ (оперативное запоминающее устройство, RAM), ППЗУ (программируемое ПЗУ, PROM), СППЗУ (стираемое программируемое ПЗУ, EPROM), флэш-память (FLASH), ЭСППЗУ (электрически стираемое программируемое ПЗУ, EEPROM), любые другие микросхему или картридж памяти, или любой другой носитель, с которого компьютер может осуществлять считывание.
[0036] Что касается сред, процессов, систем, способов, и т. д., описанных в материалах настоящей заявки, должно быть понятно, что, хотя этапы таких процессов, и т. д., были описаны в качестве происходящих согласно некоторой упорядоченной последовательности, такие процессы могли бы быть осуществлены на практике с описанными этапами, выполняемыми в порядке, ином, чем порядок, описанный в материалах настоящей заявки. Дополнительно, должно быть понятно, что некоторые этапы могли бы выполняться одновременно, что могли бы быть добавлены другие этапы, или что некоторые этапы, описанные в материалах настоящей заявки, могли бы быть опущены. Другими словами, описания систем и/или процессов в материалах настоящей заявки предоставлены с целью иллюстрации некоторых вариантов осуществления и никоим образом не должны толковаться, с тем чтобы ограничивать раскрытую сущность изобретения.
[0037] Соответственно, должно быть понятно, что настоящее изобретение, в том числе, вышеприведенное описание и прилагаемые чертежи, и нижеприведенная формула изобретения, подразумевается иллюстративным, а не ограничивающим. Многие варианты осуществления и применения, иные чем приведенные примеры, были бы очевидны специалистам в данной области техники по прочтению вышеприведенного описания. Объем изобретения не должен определяться со ссылкой на вышеприведенное описание, но взамен, должен определяться со ссылкой на формулу изобретения, прилагаемую к нему и/или включенную в непредварительную патентную заявку, основанную на ней, наряду с полным объемом эквивалентов, на которые правомочна такая формула изобретения. Ожидается и подразумевается, что будущие усовершенствования будут происходить в областях техники, обсужденных в материалах настоящей заявки, и что раскрытые системы и способы будут включены в такие будущие варианты осуществления. В целом, должно быть понятно, что раскрытая сущность изобретения является допускающей модификацию и вариацию.

Изобретение относится к транспортным системам. Компьютер и способ смены полосы движения для транспортного средства содержат этапы, на которых оценивают запрошенную смену полосы движения транспортного средства на основании радиуса изгиба текущей полосы движения главного транспортного средства и по меньшей мере одного из ограничения движения транспорта, включающего в себя запрет смены полосы движения, погодного условия и условия наружного освещения и приводят в действие компоненты транспортного средства для выполнения смены полосы движения после определения, что оценка является меньшей, чем предопределенное пороговое значение. Достигается безопасная смена полосы движения для транспортного средства. 2 н. и 15 з.п. ф-лы, 5 ил.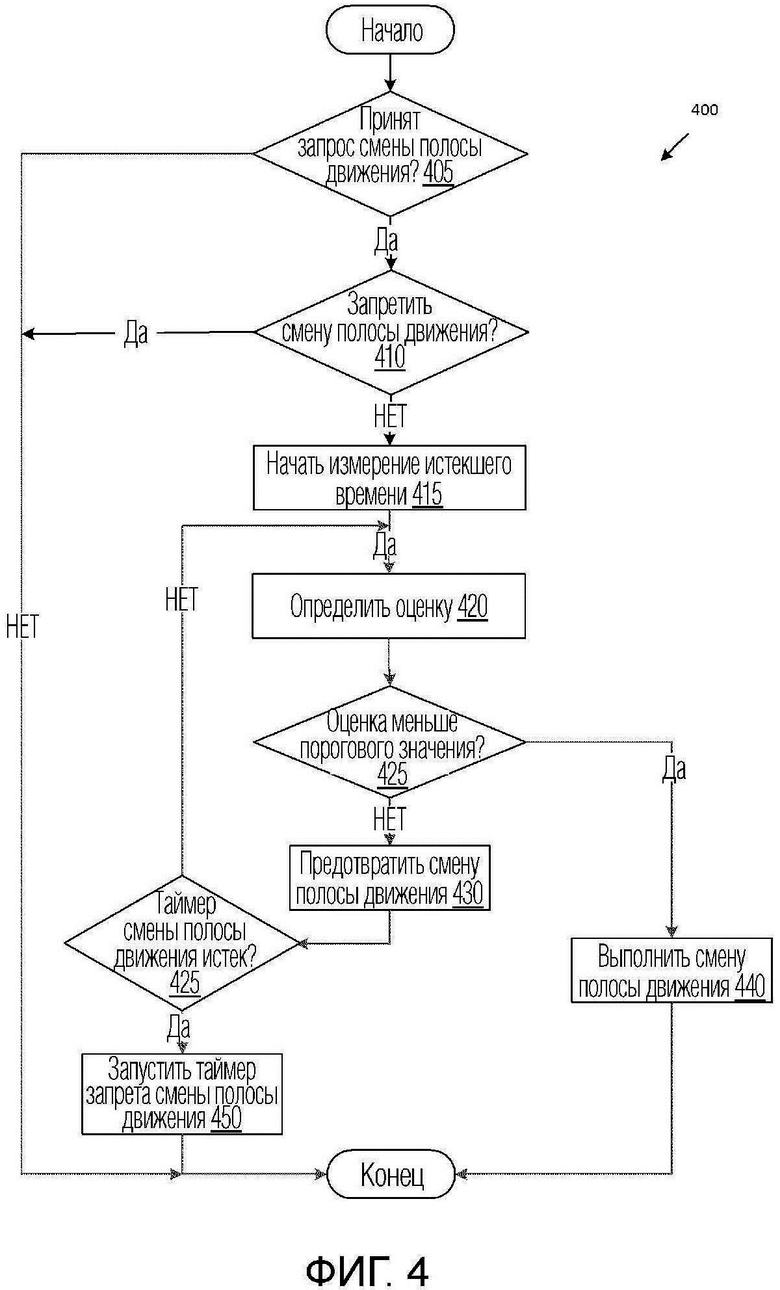
1. Компьютер, запрограммированный:
оценивать запрошенную смену полосы движения транспортного средства на основании радиуса изгиба текущей полосы движения главного транспортного средства и по меньшей мере одного из (i) ограничения движения транспорта, включающего в себя запрет смены полосы движения, (ii) погодного условия и (iii) условия наружного освещения; и
приводить в действие компоненты транспортного средства для выполнения смены полосы движения после определения, что оценка является меньшей, чем предопределенное пороговое значение, в пределах предопределенного времени.
2. Компьютер по п. 1, дополнительно запрограммированный предотвращать смену полосы движения после определения, что оценка превышает предопределенное пороговое значение.
3. Компьютер по п. 1, при этом компьютер запрограммирован определять оценку по приему пользовательского ввода, запрашивающего смену полосы движения.
4. Компьютер по п. 1, дополнительно запрограммированный игнорировать запрос пользователя на смену полосы движения в течение предопределенного времени запрета после определения, что оценка превышает предопределенное пороговое значение в течение предопределенного времени.
5. Компьютер по п. 1, в котором определение оценки дополнительно включает в себя идентификацию целевой полосы движения для смены полосы движения.
6. Компьютер по п. 1, дополнительно запрограммированный обнаруживать одно или несколько вторых транспортных средств и определять оценку на основании, по меньшей мере, частично обнаруженного одного или более вторых транспортных средств.
7. Компьютер по п. 1, при этом компоненты транспортного средства включают в себя исполнительный механизм рулевого управления главного транспортного средства.
8. Компьютер по п. 1, дополнительно запрограммированный приводить в действие компоненты транспортного средства для выполнения смены полосы движения посредством:
вывода инструкций на исполнительный механизм рулевого управления транспортного средства; и
по меньшей мере одного из ввода в действие сигналов поворота транспортного средства и вывода данных, указывающих смену полосы движения, через сеть беспроводной связи.
9. Способ смены полосы движения для транспортного средства, содержащий этапы, на которых:
оценивают запрошенную смену полосы движения транспортного средства на основании радиуса изгиба текущей полосы движения главного транспортного средства и по меньшей мере одного из (i) ограничения движения транспорта, включающего в себя запрет смены полосы движения, (ii) погодного условия и (iii) условия наружного освещения; и
приводят в действие компоненты транспортного средства для выполнения смены полосы движения после определения, что оценка является меньшей, чем предопределенное пороговое значение, в пределах предопределенного времени.
10. Способ по п. 9, дополнительно содержащий этап, на котором предотвращают смену полосы движения после определения, что оценка превышает предопределенное пороговое значение.
11. Способ по п. 9, в котором оценка определяется по приему пользовательского ввода, запрашивающего смену полосы движения.
12. Способ по п. 11, в котором оценка определяется периодически за предопределенное время.
13. Способ по п. 9, дополнительно содержащий этап, на котором игнорируют запрос пользователя на смену полосы движения в течение предопределенного времени запрета после определения, что оценка превышает предопределенное пороговое значение в течение предопределенного времени.
14. Способ по п. 9, в котором определение оценки дополнительно включает в себя идентификацию целевой полосы движения для смены полосы движения.
15. Способ по п. 9, дополнительно содержащий этап, на котором обнаруживают одно или несколько вторых транспортных средств и определяют оценку на основании, по меньшей мере, частично обнаруженного одного или нескольких вторых транспортных средств.
16. Способ по п. 9, в котором компоненты транспортного средства включают в себя исполнительный механизм рулевого управления главного транспортного средства.
17. Способ по п. 9, в котором приведение в действие компонентов транспортного средства для выполнения смены полосы движения дополнительно включает в себя:
вывод команд на исполнительный механизм рулевого управления транспортного средства; и
по меньшей мере одно из ввода в действие сигналов поворота транспортного средства и вывода данных, указывающих смену полосы движения, через сеть беспроводной связи.
| US 2016001776 A1, 07.01.2016 | |||
| US 2011241862 A1, 06.10.2011 | |||
| US 2009284361 A1, 19.11.2009 | |||
| US 2009212930 A1, 27.08.2009. |

