Область техники, к которой относится изобретение
Настоящее изобретение относится к области транспортных средств и, в частности, к средствам предотвращения столкновений между транспортными средствами.
Уровень техники
[1] Столкновения транспортных средств зачастую возникают на перекрестках. Уменьшение последствий столкновений между рассматриваемым транспортным средством и целью может сложным и дорогим в реализации. Например, определение оценки угрозы для цели может требовать данных от множества датчиков. Кроме того, выполнение оценки угрозы для нескольких целей может быть затратным, в частности, когда определенные цели могут иметь более низкий риск столкновения.
В документе US 8862383 В2 раскрыто устройство определения столкновений, которое включает в себя: блок обнаружения расстояния, обнаруживающий расстояние между транспортным средством и объектом; блок обнаружения относительной скорости, обнаруживающий относительную скорость между ними; блок вычисления предельного времени, вычисляющий время до столкновения между ними, исходя из расстояния и относительной скорости; блок обнаружения угла, обнаруживающий угол объекта относительно направления движения транспортного средства; блок вычисления изменений, вычисляющий изменения угла с течением времени; блок установок, устанавливающий значение определения таким образом, чтобы, чем короче было предельное время, тем больше было значение определения; и блок определения, определяющий, что транспортное средство, вероятнее всего, столкнется с объектом, когда изменения угла меньше значения определения.
В документе US 8762043 В2 раскрыта система для прогнозирования столкновений, которая включает в себя: сенсорную систему транспортного средства, обнаруживающую информацию, относящуюся к целевому объекту, включая положение и скорость относительно транспортного средства; блок оценки времени до столкновения, оценивающий время до столкновения на основе продольного расстояния, продольной скорости и продольного ускорения целевого объекта относительно транспортного средства; блок оценки поперечного расстояния, оценивающий поперечное расстояние между центрами транспортного средства и целевого объекта в оцененное время до столкновения; и блок определения условий столкновения, определяющий вероятность того, что транспортное средство столкнется с целевым объектом, в зависимости, по меньшей мере частично, от того, находится ли поперечное расстояние в пределах первого интервала, который основан на, по меньшей мере, поперечной ширине транспортного средства и поперечной ширине целевого объекта.
Раскрытие изобретения
Согласно первому аспекту настоящего изобретения, предложена система, содержащая компьютер, запрограммированный с возможностью:
- определять время до столкновения и, на основе поперечного расстояния и продольного расстояния, минимальное расстояние между поворачивающим рассматриваемым транспортным средством и каждой из множества целей;
- определять коэффициент угрозы для каждой цели, выбранной на основе времени до столкновения и минимального расстояния; и
- приводить в действие компонент транспортного средства на основе коэффициента угрозы.
В одном варианте осуществления компьютер дополнительно запрограммирован с возможностью приводить в действие компонент транспортного средства, когда коэффициент угрозы выше порогового значения коэффициента угрозы.
В одном варианте осуществления минимальное расстояние основано, по меньшей мере, частично на угловой скорости на повороте рассматриваемого транспортного средства.
В другом варианте осуществления минимальное расстояние основано, по меньшей мере, частично на поперечной скорости цели и продольной скорости цели.
В еще одном варианте осуществления минимальное расстояние основано, по меньшей мере, частично на поперечном ускорении цели и продольном ускорении цели.
В одном варианте осуществления компьютер дополнительно запрограммирован с возможностью определять минимальное расстояние для каждой из множества целей, по меньшей мере, частично на основе прогнозного расстояния между рассматриваемым транспортным средством и соответствующей целью в течение предварительно определенного периода времени.
В одном варианте осуществления компьютер дополнительно запрограммирован с возможностью определять коэффициент угрозы для цели, когда минимальное расстояние между целью и рассматриваемым транспортным средством ниже порогового значения расстояния, и время до столкновения ниже порогового значения времени.
В одном варианте осуществления компьютер дополнительно запрограммирован с возможностью определять минимальное расстояние для цели, если время до столкновения ниже порогового значения времени.
В одном варианте осуществления компьютер дополнительно запрограммирован с возможностью определять коэффициент угрозы для целей, если минимальное расстояние ниже порогового значения расстояния.
В одном варианте осуществления компьютер дополнительно запрограммирован с возможностью приводить в действие компонент транспортного средства, когда коэффициент угрозы выше порогового значения коэффициента угрозы.
Согласно второму аспекту настоящего изобретения, предложен способ, содержащий этапы, на которых:
- определяют время до столкновения и, на основе поперечного расстояния и продольного расстояния, минимальное расстояние между поворачивающим рассматриваемым транспортным средством и каждой из множества целей;
- определяют коэффициент угрозы для каждой цели, выбранной на основе времени до столкновения и минимального расстояния; и
- приводят в действие компонент транспортного средства на основе коэффициента угрозы.
В одном варианте осуществления способ дополнительно содержит этап, на котором приводят в действие компонент транспортного средства, когда коэффициент угрозы выше порогового значения коэффициента угрозы.
В одном варианте осуществления минимальное расстояние основано, по меньшей мере, частично на угловой скорости на повороте рассматриваемого транспортного средства.
В другом варианте осуществления минимальное расстояние основано, по меньшей мере, частично на поперечной скорости цели и продольной скорости цели.
В еще одном варианте осуществления минимальное расстояние основано, по меньшей мере, частично на поперечном ускорении цели и продольном ускорении цели.
В одном варианте осуществления способ дополнительно содержит этап, на котором определяют минимальное расстояние для каждой из множества целей на основе прогнозного расстояния между рассматриваемым транспортным средством и соответствующей целью в течение предварительно определенного периода времени.
В одном варианте осуществления способ дополнительно содержит этап, на котором определяют коэффициент угрозы для одной из целей, когда минимальное расстояние между целью и рассматриваемым транспортным средством ниже порогового значения расстояния, и время до столкновения ниже порогового значения времени.
В одном варианте осуществления способ дополнительно содержит этап, на котором определяют минимальное расстояние для целей, если время до столкновения ниже порогового значения времени.
В одном варианте осуществления способ дополнительно содержит этап, на котором определяют коэффициент угрозы для целей, если минимальное расстояние ниже порогового значения расстояния.
В одном варианте осуществления способ дополнительно содержит этап, на котором приводят в действие компонент транспортного средства, когда коэффициент угрозы выше порогового значения коэффициента угрозы.
Краткое описание чертежей
[2] Фиг. 1 является блок-схемой примерной системы для недопущения и уменьшения последствий столкновений.
[3] Фиг. 2 иллюстрирует примерное пересечение с рассматриваемым транспортным средством и множеством целей.
[4] Фиг. 3 является примерной схемой измерений, проведенных посредством рассматриваемого транспортного средства в полярных координатах между рассматриваемым транспортным средством и целью.
[5] Фиг. 4 является примерной схемой преобразования измерений по фиг. 3 в прямоугольные координаты.
[6] Фиг. 5 является блок-схемой примерного процесса для предотвращения столкновений между рассматриваемым транспортным средством и целью.
Осуществление изобретения
[7] Вычислительное устройство в транспортном средстве может быть запрограммировано с возможностью определять время до столкновения между рассматриваемым транспортным средством на повороте и каждой из множества целей и минимальное расстояние между рассматриваемым транспортным средством и, по меньшей мере, одной из целей. Минимальное расстояние основано, по меньшей мере, частично на поперечном расстоянии и продольном расстоянии рассматриваемого транспортного средства от цели. Вычислительное устройство может определять "коэффициент угрозы", по меньшей мере, для одной из целей и может приводить в действие один или более компонентов рассматриваемого транспортного средства, по меньшей мере, частично на основе коэффициента угрозы. Одна или более из множества целей могут не требовать всесторонней оценки угрозы, и вычислительное устройство запрограммировано с возможностью выбирать с уменьшением, т.е. сокращать число целей для того, чтобы выполнять оценку угрозы. В частности, вычислительное устройство запрограммировано с возможностью осуществлять оценку угрозы для целей, имеющих время до столкновения ниже порогового значения времени и минимальное расстояние ниже порогового значения расстояния. Таким образом, вычислительное устройство может сокращать число вычисленных оценок угрозы и сокращать число вычислений для предотвращения и уменьшения последствий потенциальных столкновений между транспортным средством и целями.
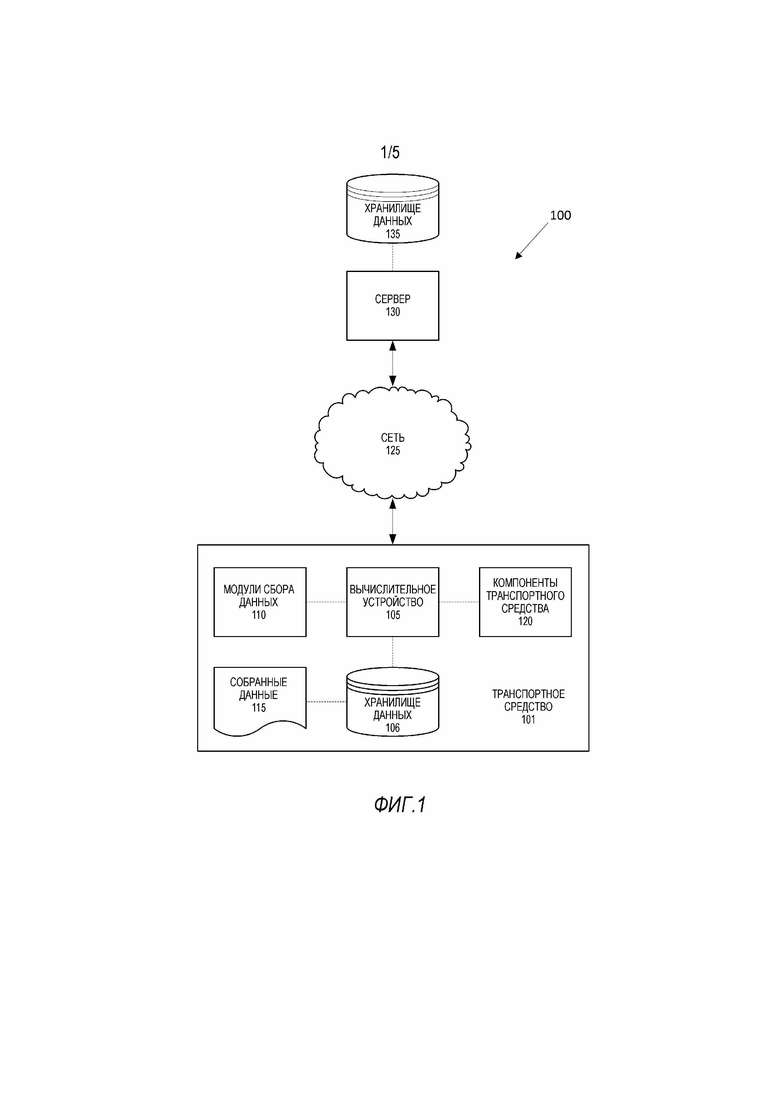
[8] Фиг. 1 иллюстрирует систему 100 для недопущения и уменьшения последствий столкновений. Если не указано иное в этом раскрытии сущности, "пересечение" задается в качестве местоположения, в котором пересекаются текущие или потенциальные будущие траектории двух или более транспортных средств. Таким образом, пересечение может находиться в любом местоположении на поверхности, в котором могут сталкиваться два или более транспортных средств, например, на дороге, подъездном пути, автомобильной парковке, въезде в дорогу общего пользования, путях движения и т.д. Соответственно, пересечение определяется посредством идентификации местоположения, в котором могут встречаться, т.е. сталкиваться два или более транспортных средств. Такое определение использует потенциальные будущие траектории рассматриваемого транспортного средства 101, а также близлежащих других транспортных средств и/или других объектов.
[9] Вычислительное устройство 105 в транспортном средстве 101 запрограммировано с возможностью принимать собранные данные 115 из одного или более датчиков 110. Например, данные 115 транспортного средства 101 могут включать в себя местоположение транспортного средства 101, местоположение цели и т.д. Данные местоположения могут иметь известную форму, например, геокоординат, к примеру, координат широты и долготы, полученных через навигационную систему, как известно, которая использует глобальную систему позиционирования (GPS). Дополнительные примеры данных 115 могут включать в себя измерения систем и компонентов транспортного средства 101, например, скорости транспортного средства 101, траектории транспортного средства 101 и т.д.
[10] Вычислительное устройство 105, в общем, запрограммировано с возможностью связи по сети транспортного средства 101, например, включающей в себя шину связи, как известно. Через сеть, шину и/или другие проводные или беспроводные механизмы (например, проводную или беспроводную локальную вычислительную сеть в транспортном средстве 101), вычислительное устройство 105 может передавать сообщения в различные устройства в транспортном средстве 101 и/или принимать сообщения из различных устройств, например, контроллеров, актуаторов, датчиков и т.д., включающих в себя датчики 110. Альтернативно или дополнительно, в случаях, если вычислительное устройство 105 фактически содержит несколько устройств, сеть транспортного средства может использоваться для связи между устройствами, представленными в качестве вычислительного устройства 105 в этом раскрытии сущности. Помимо этого, вычислительное устройство 105 может быть запрограммировано с возможностью обмена с сетью 125, которая, как описано ниже, может включать в себя различные технологии проводных и/или беспроводных сетей, например, сотовые, Bluetooth-, проводные и/или беспроводные пакетные сети и т.д.
[11] Хранилище 106 данных может иметь любой известный тип, например, жесткие диски, полупроводниковые накопители, серверы или любые энергозависимые или энергонезависимые носители. Хранилище 106 данных может сохранять собранные данные 115, отправленные из датчиков 110.
[12] Датчики 110 могут включать в себя множество устройств. Например, как известно, различные контроллеры в транспортном средстве 101 могут работать в качестве датчиков 110, чтобы предоставлять данные 115 через сеть или шину транспортного средства 101, например, данные 115, связанные со скоростью, ускорением, позицией транспортного средства, состоянием подсистемы и/или компонентов и т.д. Дополнительно, другие датчики 110 могут включать в себя камеры, детекторы движения и т.д., т.е. датчики 110, чтобы предоставлять данные 115 для оценки местоположения цели, проецирования пути цели, оценки местоположения полосы движения дороги и т.д. Датчики 110 также могут включать в себя радар ближнего действия, радар дальнего действия, лидар и/или ультразвуковые преобразователи.
[13] Собранные данные 115 могут включать в себя множество данных, собранных в транспортном средстве 101. Примеры собранных данных 115 предоставляются выше, и кроме того, данные 115, в общем, собираются с использованием одного или более датчиков 110 и дополнительно могут включать в себе данные, вычисленные из них, в вычислительном устройстве 105 и/или на сервере 130. В общем, собранные данные 115 могут включать в себя любые данные, которые могут собираться посредством датчиков 110 и/или вычисляться из таких данных.
[14] Транспортное средство 101 может включать в себя множество компонентов 120 транспортного средства. При использовании в данном документе, каждый компонент 120 транспортного средства включает в себя один или более аппаратных компонентов, адаптированных с возможностью осуществлять механическую функцию или операцию, такую как движение транспортного средства, замедление или остановка транспортного средства, руление транспортным средством и т.д. Неограничивающие примеры компонентов 120 включают в себя компонент тяги (который включает в себя, например, двигатель внутреннего сгорания и/или электромотор и т.д.), компонент трансмиссии, компонент руления (например, который может включать в себя одно или более из руля, рулевой зубчатой рейки и т.д.), компонент торможения, компонент помощи при парковке, компонент адаптивной системы оптимального регулирования скорости, компонент адаптивного руления и т.п.
[15] Вычислительное устройство 105 может приводить в действие компоненты 120, например, для того, чтобы тормозить и/или замедлять, и/или останавливать транспортное средство 101, чтобы объезжать цели, и т.д. Вычислительное устройство 105 может быть запрограммировано с возможностью управлять некоторыми или всеми компонентами 120 с ограниченным вводом или без ввода от человека-водителя, т.е. вычислительное устройство 105 может быть запрограммировано с возможностью управлять компонентами 120. Когда вычислительное устройство 105 управляет компонентами 120, вычислительное устройство 105 может игнорировать ввод от человека-водителя относительно компонентов 120, выбранных для управления посредством вычислительного устройства 105, которое предоставляет инструкции, например, через шину связи транспортного средства 101 и/или в электронные модули управления (ECU), которые известны для того, чтобы приводить в действие компоненты транспортного средства 101, например, применять тормоза, изменять угол поворота руля и т.д. Например, если человек-водитель пытается поворачивать руль в ходе операции руления, вычислительное устройство 105 может игнорировать перемещение руля и рулить транспортным средством 101 согласно программированию.
[16] Когда вычислительное устройство 105 управляет транспортным средством 101, транспортное средство 101 представляет собой "автономное" транспортное средство 101. Для целей этого раскрытия сущности, термин "автономное транспортное средство" используется для того, чтобы означать транспортное средство 101, работающее в полностью автономном режиме. Полностью автономный режим задается как режим, в котором каждое из тяги (типично через силовую передачу, включающую в себя электромотор и/или двигатель внутреннего сгорания), торможения и руления транспортного средства 101 управляется посредством вычислительного устройства 105, а не человеком-водителем. Полуавтономный режим представляет собой режим, в котором, по меньшей мере, одно из тяги (типично через силовую передачу, включающую в себя электромотор и/или двигатель внутреннего сгорания), торможения и руления транспортного средства 101 управляется, по меньшей мере, частично посредством вычислительного устройства 105, вместо человека-водителя.
[17] Система 100 дополнительно может включать в себя сеть 125, соединенную с сервером 130 и хранилищем 135 данных. Компьютер 105 дополнительно может быть запрограммирован с возможностью обмениваться данными с одним или более удаленных веб-узлов, к примеру, с сервером 130, через сеть 125, причем такой удаленный веб-узел, возможно, включает в себя хранилище 135 данных. Сеть 125 представляет один или более механизмов, посредством которых компьютер 105 транспортного средства может обмениваться данными с удаленным сервером 130. Соответственно, сеть 125 может представлять собой один или более различных механизмов проводной или беспроводной связи, включающих в себя любую требуемую комбинацию механизмов проводной (например, кабельной и волоконной) и/или беспроводной (например, сотовой, беспроводной, спутниковой, микроволновой и радиочастотной) связи и любую требуемую топологию сети (или топологии, когда используются несколько механизмов связи). Примерные сети связи включают в себя сети беспроводной связи (например, с использованием Bluetooth, IEEE 802.11, связи между транспортными средствами (V2V), к примеру, специализированной ближней связи (DSRC) и т.д.), локальные вычислительные сети (LAN) и/или глобальные вычислительные сети (WAN), включающие в себя Интернет, предоставляющие услуги обмена данными.
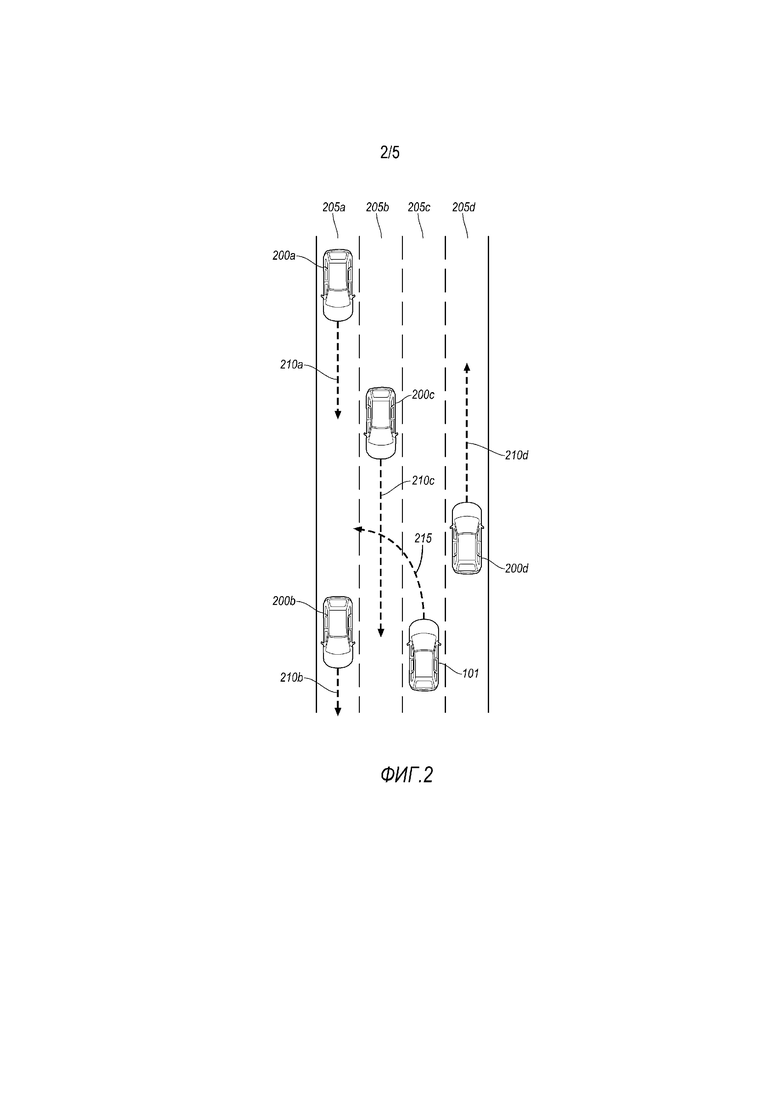
[18] Фиг. 2 иллюстрирует примерное рассматриваемое транспортное средство 101 и множество примерных целей 200, которые могут пересекать путь рассматриваемого транспортного средства 101 при пересечении на дороге. Дорога включает в себя множество полос 205 движения дороги, включающих в себя полосы 205a, 205b, 205c, 205d движения дороги.
[19] Датчики 110 в рассматриваемом транспортном средстве 101 могут обнаруживать четыре цели 200a, 200b, 200c, 200d. Каждая из целей 200a, 200b, 200c, 200d имеет соответствующую траекторию 210a, 210b, 210c, 210d и различную вероятность столкновения с рассматриваемым транспортным средством 101. Рассматриваемое транспортное средство 101 может выполнять поворот 215 через одну или более полос 205 движения дороги. Таким образом, не все цели 200a, 200b, 200c, 200d гарантируют всестороннюю оценку угрозы при пересечении. Например, транспортное средство 200a находится в полосе 205a движения дороги, которую рассматриваемое транспортное средство 101 должно пересекать в ходе поворота 215, так что вычислительное устройство 105 сможет выполнять оценку угрозы для цели 200a. В другом примере, цель 200d находится в полосе 205d движения дороги и не пересекает путь рассматриваемого транспортного средства 101 на повороте 215. Таким образом, вычислительное устройство 105 не должно выполнять оценку угрозы для цели 200d. Аналогично, цель 200b находится в полосе движения дороги 200a, но уже освободила путь, по которому рассматриваемое транспортное средство 101 должно двигаться на повороте 215, так что вычислительное устройство 105 не должно выполнять оценку угрозы для цели 200b.
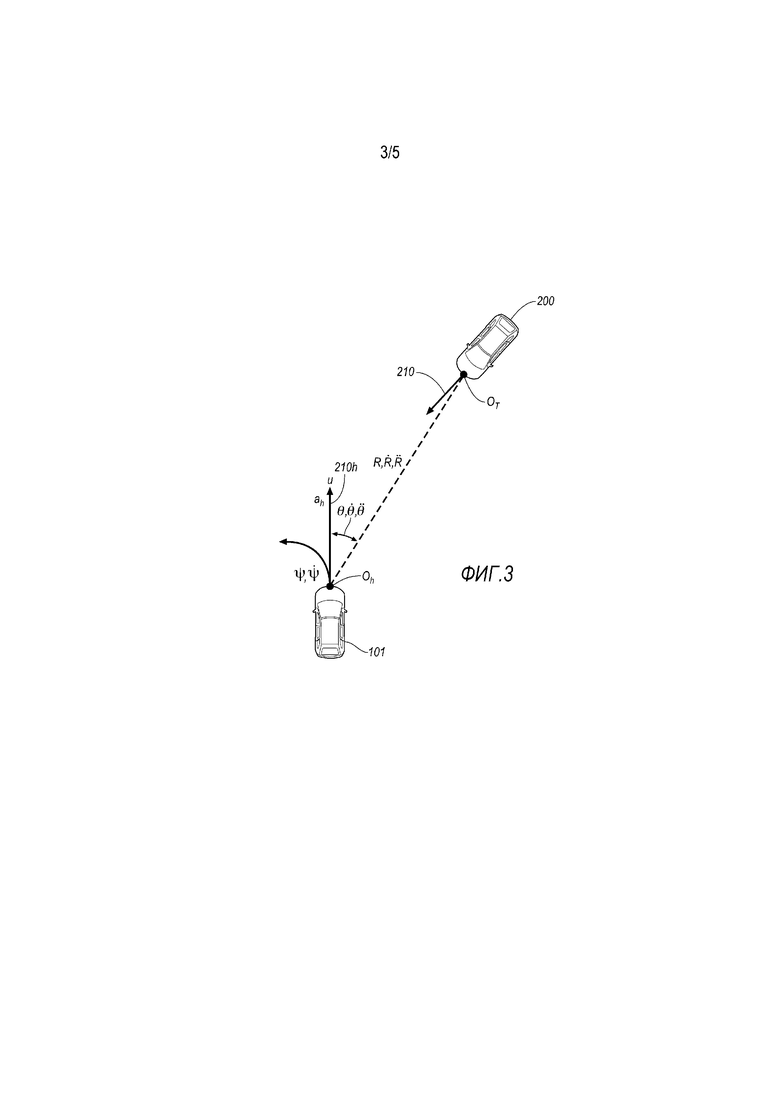
[20] Фиг. 3 иллюстрирует данные 115, измеряемые посредством датчиков 110 рассматриваемого транспортного средства 101 и одной примерной цели 200, как определено посредством вычислительного устройства 105 в полярных координатах. Цель 200 имеет траекторию 210, как описано выше. Рассматриваемое транспортное средство 101 имеет траекторию 210h. Траектории 210, 210h указывают то, куда должны перемещаться рассматриваемое транспортное средство 101 и цель 200, если рассматриваемое транспортное средство 101 и цель 200 продолжают движение на соответствующих скоростях без поворота. Рассматриваемое транспортное средство 101 может задавать систему координат с началом Oh координат в центральной точке переднего конца рассматриваемого транспортного средства 101. Вычислительное устройство 105 может использовать начало Oh координат для того, указывать задавать позицию, скорость и/или ускорение рассматриваемого транспортного средства 101 и цели 200. Один или более датчиков 110 могут исходно собирать данные 115 в полярных координатах.
[21] Дальность R между рассматриваемым транспортным средством 101 и целью 200 задается как кратчайшая прямая линия между началом Oh координат рассматриваемого транспортного средства 101 и началом Ot координат цели 200, измеренная в метрах. Темп  изменения дальности представляет собой темп изменения дальности (т.е. dR/dt), и ускорение
изменения дальности представляет собой темп изменения дальности (т.е. dR/dt), и ускорение  в пределах дальности представляет собой темп изменения темпа изменения дальности (т.е. d2R/dt2). Дальность R в силу этого представляет собой кратчайшее расстояние между рассматриваемым транспортным средством 101 и целью 200. Дальность R может определяться посредством одного из датчиков 110, например, радара 110.
в пределах дальности представляет собой темп изменения темпа изменения дальности (т.е. d2R/dt2). Дальность R в силу этого представляет собой кратчайшее расстояние между рассматриваемым транспортным средством 101 и целью 200. Дальность R может определяться посредством одного из датчиков 110, например, радара 110.
[22] Азимут θ представляет собой угол, заданный между траекторией 210h рассматриваемого транспортного средства 101 и траекторией 210 цели 200, измеряемый в радианах. Траектория 210h рассматриваемого транспортного средства 101 и траектория 210 цели 200 проецируются в качестве прямых линий, пересекающихся в рассматриваемом транспортном средстве 101. Угол, заданный посредством направлений движения, представляет собой азимут θ. Темп  изменения азимута представляет собой темп изменения азимута θ (т.е. dθ/dt), и ускорение
изменения азимута представляет собой темп изменения азимута θ (т.е. dθ/dt), и ускорение  в пределах азимута представляет собой темп изменения темпа изменения азимута (т.е. d2θ/dt2).
в пределах азимута представляет собой темп изменения темпа изменения азимута (т.е. d2θ/dt2).
[23] Курсовой угол ψ представляет собой угол, заданный между траекторией рассматриваемого транспортного средства 101 и направлением полосы 205 движения дороги, измеряемый в радианах. Курсовой угол ψ указывает то, находится или нет рассматриваемое транспортное средство 101 на повороте 215 и/или должно выезжать за пределы текущей полосы 205 движения дороги. Курсовой угол ψ во время t0 составляет ψ0.
[24] Когда рассматриваемое транспортное средство 101 находится на повороте 215, курсовой угол ψ рассматриваемого транспортного средства 101 изменяется. Изменение ψ, т.е. угловой скорости на повороте, задается как скорость  относительно вертикальной оси, измеряемая в радианах в секунду. Скорость относительно вертикальной оси может использоваться посредством вычислительного устройства 105 для того, чтобы определять то, должна или нет цель 200 сталкиваться с рассматриваемым транспортным средством 101. Таким образом, поскольку рассматриваемое транспортное средство 101 поворачивает в направлении от текущего направления движения, рассматриваемое транспортное средство 101 может объезжать цель 200, даже если в определенное время направление движения цели 200 указывает потенциальное столкновение с рассматриваемым транспортным средством 101.
относительно вертикальной оси, измеряемая в радианах в секунду. Скорость относительно вертикальной оси может использоваться посредством вычислительного устройства 105 для того, чтобы определять то, должна или нет цель 200 сталкиваться с рассматриваемым транспортным средством 101. Таким образом, поскольку рассматриваемое транспортное средство 101 поворачивает в направлении от текущего направления движения, рассматриваемое транспортное средство 101 может объезжать цель 200, даже если в определенное время направление движения цели 200 указывает потенциальное столкновение с рассматриваемым транспортным средством 101.
[25] Скорость u рассматриваемого транспортного средства представляет собой скорость рассматриваемого транспортного средства 101 вдоль траектории 210h, измеренную в метрах в секунду. Ускорение ah рассматриваемого транспортного средства представляет собой темп изменения скорости u рассматриваемого транспортного средства (т.е. du/dt).
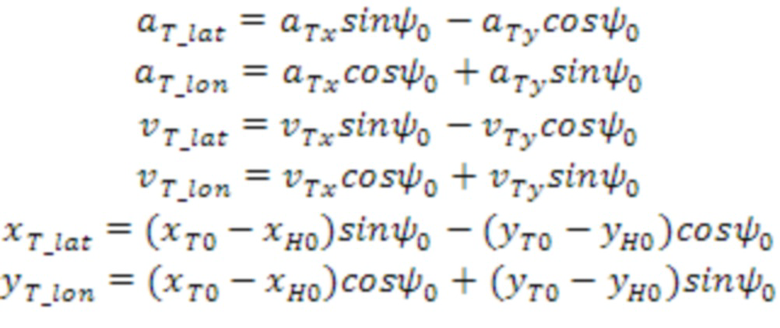
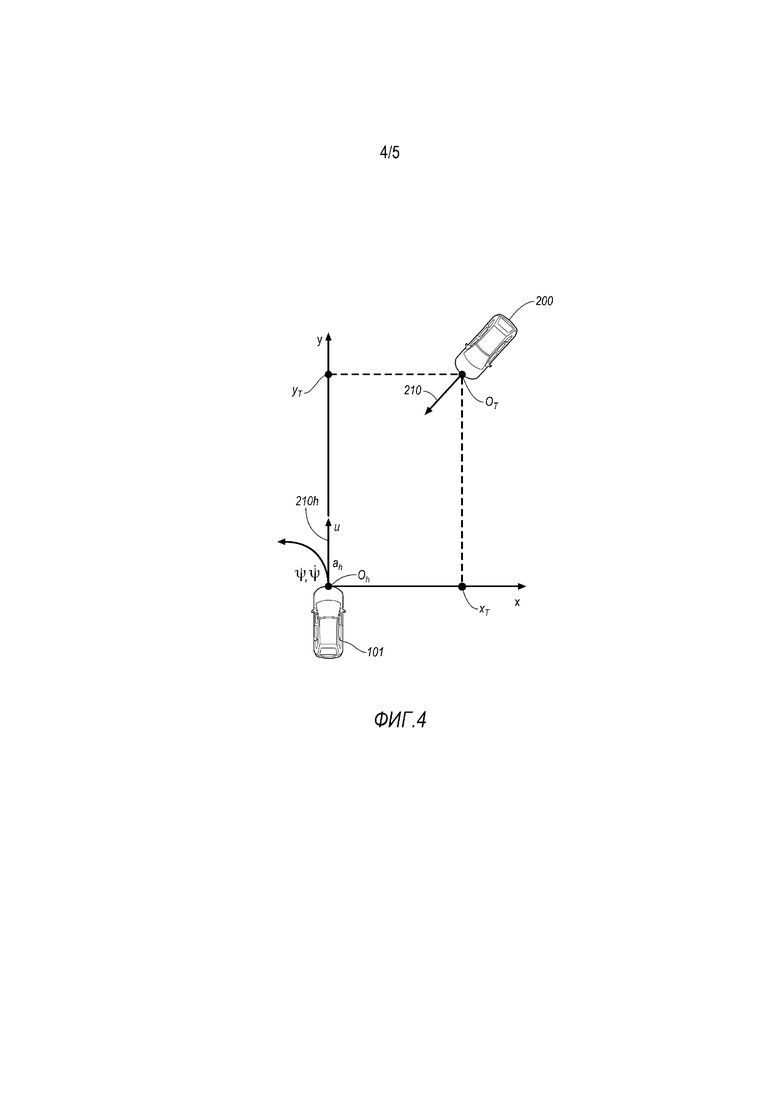
[26] Фиг. 4 иллюстрирует рассматриваемое транспортное средство 101 и цель 200 в прямоугольных координатах. Прямоугольные координаты начинаются в начале координат рассматриваемого транспортного средства 101 и указываются согласно ортогональным направлениям: поперечному направлению, обозначенному с помощью переменной x, и продольному направлению, обозначенному с помощью переменной y. Вместо использования полярных координат, как показано на фиг 3, вычислительное устройство 105 может прогнозировать позицию, скорость и ускорение рассматриваемого транспортного средства 101 и целевого транспортного средства в прямоугольных координатах. В частности, вычислительное устройство 105 может определять позицию, скорость и ускорение в продольном направлении и позицию, скорость и ускорение в поперечном направлении, как описано ниже. Кроме того, один или более датчиков 110 могут собирать данные 115 в полярных координатах, и вычислительное устройство 105 может преобразовывать данные 115 в полярных координатах в значения в прямоугольных координатах.
[27] Поперечная позиция xT цели 200 представляет собой расстояние в поперечном направлении цели 200 относительно рассматриваемого транспортного средства 101. Поперечная скорость vTx цели 200 представляет собой темп изменения поперечной позиции xT, т.е. dxT/dt. Поперечное ускорение aTx цели 200 представляет собой темп изменения поперечной скорости vTx, т.е. dvTx/dt. Поперечная позиция рассматриваемого транспортного средства 101 во время t0 представляет собой xH0, и поперечная позиция цели 200 во время t0 представляет собой xT0.
[28] Продольная позиция yT цели 200 представляет собой расстояние в продольном направлении цели 200 относительно рассматриваемого транспортного средства 101. Продольная скорость vTy цели 200 представляет собой темп изменения поперечной позиции yT, т.е. dvTy/dt. Продольное ускорение aTy цели 200 представляет собой темп изменения продольной скорости vTy, т.е. dvTy/dt. Продольная позиция рассматриваемого транспортного средства 101 во время t0 представляет собой yH0, и продольная позиция цели 200 во время t0 представляет собой yT0.
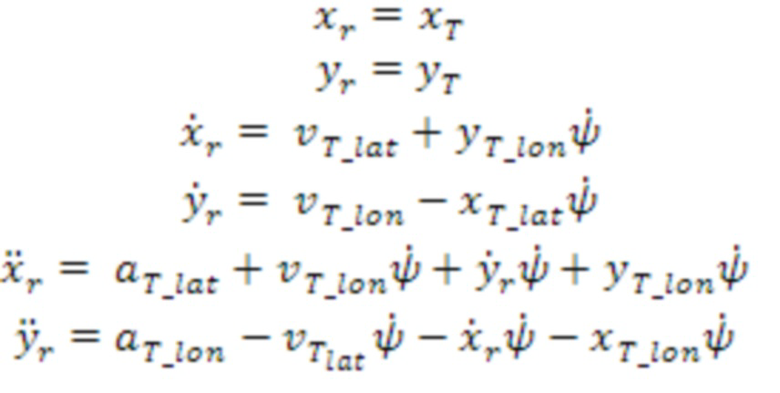
[29] Радар 110 может предоставлять относительные измерения расстояния между рассматриваемым транспортным средством 101 и целью 200. Например, радар 110 может измерять относительное поперечное расстояние xr и относительное продольное расстояние yr между рассматриваемым транспортным средством 101 и целью 200. Радар 110 может определять относительную поперечную скорость  и относительную продольную скорость
и относительную продольную скорость  между рассматриваемым транспортным средством 101 и целью 200. Радар 110 может определять относительное поперечное ускорение
между рассматриваемым транспортным средством 101 и целью 200. Радар 110 может определять относительное поперечное ускорение  и относительное продольное ускорение
и относительное продольное ускорение  между рассматриваемым транспортным средством 101 и целью 200. Как описано ниже, вычислительное устройство 105 может использовать измеренные относительные значения
между рассматриваемым транспортным средством 101 и целью 200. Как описано ниже, вычислительное устройство 105 может использовать измеренные относительные значения  для того, чтобы определять прогнозированные значения в системе координат, например, xT, vTy и т.д.
для того, чтобы определять прогнозированные значения в системе координат, например, xT, vTy и т.д.
[30] Значения, описанные выше, могут быть функциями от времени t, измеренными в секундах. Когда вычислительное устройство 105 начинает сбор данных 115, вычислительное устройство 105 назначает время t в качестве t0. Вычислительное устройство 105 может прогнозировать путь рассматриваемого транспортного средства 101 и цели 200 за предварительно определенный временной горизонт th. Для целей следующих уравнений, значение в данное время t может задаваться как это значение во время t0, суммированное с изменением значения от t0 до t. Например, представление x(t) задает поперечную позицию x(t0)+x(t-t0). Значения значений в t0 могут измеряться посредством датчиков 110, и значения для t>t0 вычисляются с помощью нижеперечисленных уравнений.
[31] Движение рассматриваемого транспортного средства 101 может описываться следующим образом:
 (1)
(1)
 (2)
(2)
 (3),
(3),
[32] где xH(t), yH(t) представляют собой позицию рассматриваемого транспортного средства 101 во время t+t0 в прямоугольных координатах, описанных выше.
[33] Когда цель 200 перемещается по прямой линии:
 (4)
(4)
 (5),
(5),
[34] где xT(t), yT(t) представляют собой позицию цели 200 во время t0+t в прямоугольных координатах.
[35] Расстояние между рассматриваемым транспортным средством 101 и целью 200 в направлении по оси X, dx(t), и направление по оси Y, dy(t), может задаваться следующим образом:

 (6)
(6)

 (7)
(7)
[36] На основе вышеприведенных уравнений, могут определяться поперечное расстояние dLat(t) и продольное расстояние dLong(t):

 (8)
(8)

 , (9)
, (9)
[37] где поперечная и продольная информация непосредственно предоставляется посредством одного из датчиков 110 и задается следующим образом:
 (10)
(10)
[38] Во время t+t0, проецируемое расстояние между рассматриваемым транспортным средством 101 и целью 200 может выражаться с использованием значений, определенных в вышеприведенных уравнениях 6-9, следующим образом:
 (11)
(11)
[39] Для периода времени в th секунд, вычислительное устройство 105 может определять проецируемое расстояние d(t) за период времени [t0, t0+th]. Вычислительное устройство 105 может определять минимальное расстояние между рассматриваемым транспортным средством 101 и целью 200 в течение временного окна [t0, t0+th], т.е.  . Когда TTC(t)<TTCthresh и dmin(t)<dminthresh, цель 200 выбирается для дополнительной оценки угрозы; иначе цель 200 не выбирается.
. Когда TTC(t)<TTCthresh и dmin(t)<dminthresh, цель 200 выбирается для дополнительной оценки угрозы; иначе цель 200 не выбирается.
[40] Взаимосвязь между радарными данными 115 и другими данными датчиков 115 может описываться следующим образом:
 (12)
(12)
[41] Вычислительное устройство 105 может выполнять оценку угрозы для целей 200 и формировать коэффициент угрозы для каждой из целей 200. Коэффициент угрозы представляет собой прогнозирование того, должна либо нет конкретная цель 200 пересекаться или сталкиваться с рассматриваемым транспортным средством 101. В частности, вычислительное устройство 105 может определять коэффициент ATN угрозы на основе ускорения, коэффициент BTN угрозы на основе торможения и коэффициент STN угрозы на основе руления для рассматриваемого транспортного средства 101 и цели 200 и на основе коэффициентов ATN, BTN, STN угрозы, которые могут комбинироваться в один коэффициент TN угрозы, чтобы приводить в действие компоненты 120.
[42] BTN представляет собой показатель изменения продольного ускорения, чтобы обеспечивать возможность одному из рассматриваемого транспортного средства 101 останавливаться или цели 200 обгонять рассматриваемое транспортное средство 101. STN представляет собой показатель изменения поперечного ускорения, чтобы обеспечивать возможность одному из рассматриваемого транспортного средства 101 и цели 200 освобождать зону пересечения. ATN представляет собой показатель конкретного продольного ускорения, чтобы обеспечивать возможность одному из рассматриваемого транспортного средства 101 и цели 200 обгонять другое из рассматриваемого транспортного средства 101 и цели 200. Таким образом, BTN представляет собой показатель продольного ускорения рассматриваемого транспортного средства 101 и может определяться с помощью данных 115 из датчиков 110. STN представляет собой показатель поперечного ускорения рассматриваемого транспортного средства 101. ATN представляет собой показатель изменений дросселя. Вычислительное устройство 105 может определять STN, BTN и/или ATN для каждой из целей 200, чтобы формировать коэффициент угрозы.
[43] Вычислительное устройство 105 может определять коэффициент угрозы на основе прогнозных траекторий рассматриваемого транспортного средства 101 и цели 200. Таким образом, на основе позиции, скорости, ускорения и угловой скорости на повороте рассматриваемого транспортного средства 101 и цели 200, вычислительное устройство 105 может определять коэффициент угрозы для цели 200. Вычислительное устройство 105 может использовать значения, определенные выше в уравнениях 1-12, для того чтобы определять коэффициент угрозы. В одном неограничивающем примере, BTN, STN и ATN могут определяться способом, в том числе согласно уравнениям, описанным в заявке на патент (США) № 15/005037, публикация № 2016/0362104, поданной 25 января 2016 года, которая полностью содержится в данном документе по ссылке. Альтернативно могут использоваться другие технологии для определения коэффициентов угрозы, например, к примеру, как известно или разрабатывается.
[44] Вычислительное устройство 105 может приводить в действие один или более компонентов 120 транспортного средства на основе коэффициента угрозы, например, когда коэффициент угрозы выше предварительно определенного порогового значения коэффициента угрозы. Вычислительное устройство 105 может приводить в действие компоненты 120 на основе сравнения коэффициента угрозы с множеством пороговых значений. Например, если коэффициент угрозы выше 0,7, вычислительное устройство 105 может приводить в действие тормоз 120, чтобы замедлять рассматриваемое транспортное средство 101, например, до -6,5 метров в секунду в квадрате (м/с2). В другом примере, если коэффициент угрозы выше 0,4, но меньше или равен 0,7, вычислительное устройство 105 может приводить в действие тормоз 120, например, для замедления в -2,0 м/с2. В другом примере, если коэффициент угрозы превышает 0,2, но меньше или равен 0,4, вычислительное устройство 105 может отображать визуальное предупреждение на HMI транспортного средства 101 и/или воспроизводить аудиопредупреждение по динамику.
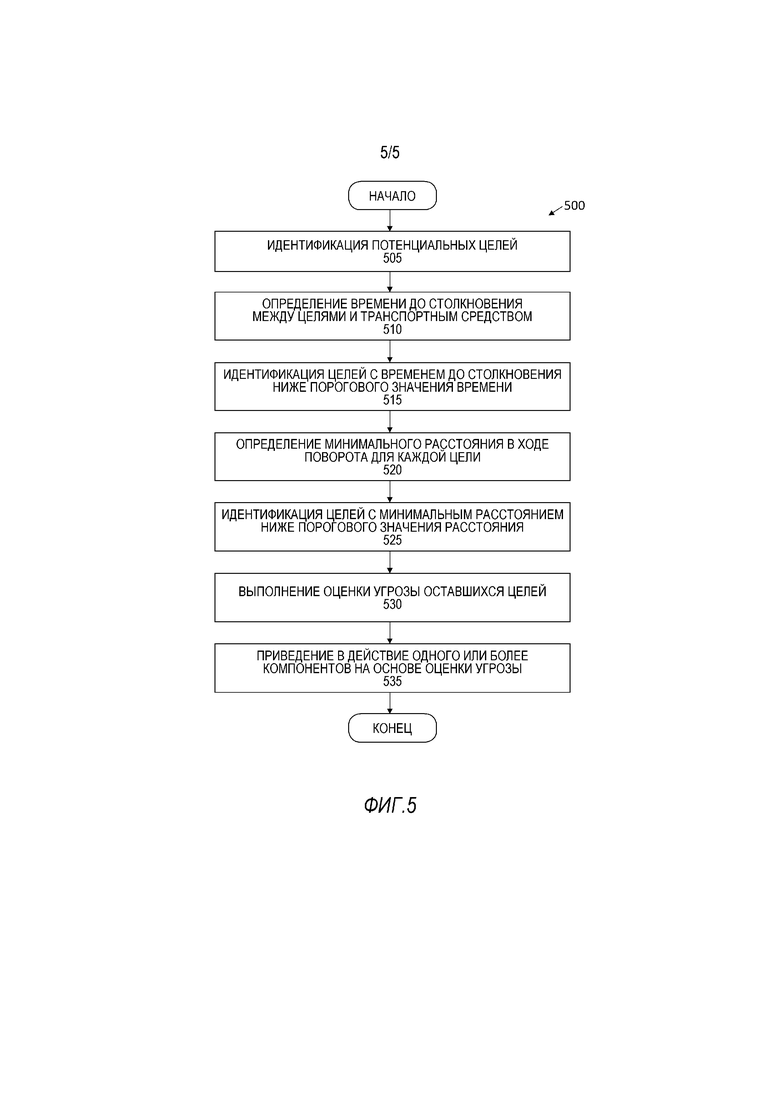
[45] Фиг. 5 иллюстрирует примерный процесс 500 для предотвращения столкновения при пересечении. Процесс 500 начинается на этапе 505, на котором вычислительное устройство 105 приводит в действие один или более датчиков 110, чтобы идентифицировать цели 200. Как пояснено выше относительно фиг. 2, вычислительное устройство 105 идентифицирует множество целей 200, и некоторые цели 200 могут не требовать оценки угрозы.
[46] Затем, на этапе 510, вычислительное устройство 105 определяет время TTC до столкновения для каждой из целей 200 и рассматриваемого транспортного средства 101. Как описано выше, время TTC до столкновения основано на дальности R и темпе изменения дальности цели 200 относительно рассматриваемого транспортного средства 101. Время TTC до столкновения определяет то, следует или нет рассматривать конкретную цель 200 для оценки угрозы.
[47] Затем, на этапе 515, вычислительное устройство 105 идентифицирует цели 200, имеющие соответствующее время TTC до столкновения ниже порогового значения TTCthresh времени. Как описано выше, если время TTC до столкновения выше порогового значения TTCthresh времени, то маловероятно, что цель 200 должна сталкиваться с рассматриваемым транспортным средством 101, и вычислительное устройство 105 не должно выполнять оценку угрозы для этой цели 200.
[48] Затем, на этапе 520, вычислительное устройство 105 определяет минимальное расстояние d(t) между рассматриваемым транспортным средством 101 и каждой оставшейся целью 200. Минимальное расстояние d(t) основано, по меньшей мере, частично на скорости относительно вертикальной оси рассматриваемого транспортного средства 101 и поперечной позиции xT и поперечной позиции yT цели 200.
[49] Затем, на этапе 525, вычислительное устройство 105 идентифицирует цели 200, которые имеют минимальное расстояние d(t) ниже порогового значения dminthresh расстояния. Как описано выше, цели 200, которые имеют минимальное расстояние d(t) выше порогового значения dminthresh расстояния, могут иметь более низкую вероятность столкновения с рассматриваемым транспортным средством 101, и в силу этого вычислительное устройство 105 не может выполнять оценку угрозы для этих целей 200.
[50] Затем, на этапе 530, вычислительное устройство 105 выполняет оценку угрозы, чтобы определять коэффициент угрозы для каждой из оставшихся целей 200. Таким образом, цели 200, которые имеют время TTC до столкновения и минимальное расстояние d(t) ниже их соответствующих пороговых значений, имеют более высокую вероятность столкновения с рассматриваемым транспортным средством 101. Таким образом, вычислительное устройство 105 выбирает поднабор целей 200, которые имеют наибольшую вероятность столкновения с рассматриваемым транспортным средством 101, чтобы выполнять оценку угрозы.
[51] Затем, на этапе 535, вычислительное устройство 105 приводит в действие один или более компонентов 120 на основе оценки угрозы. Например, если коэффициент угрозы выше 0,7, вычислительное устройство 105 может приводить в действие тормоз, чтобы замедлять рассматриваемое транспортное средство 101, например, до -6,5 метров в секунду в квадрате (м/ с2). В другом примере, если коэффициент угрозы выше 0,4, но меньше или равен 0,7, вычислительное устройство 105 может приводить в действие тормоз, например, для замедления в -2,0 м/с2. В другом примере, если коэффициент угрозы превышает 0,2, но меньше или равен 0,4, вычислительное устройство 105 может отображать визуальное предупреждение на HMI транспортного средства 101 и/или воспроизводить аудиопредупреждение по динамику. После этапа 535, процесс 500 завершается.
[52] При использовании в данном документе, наречие "практически", модифицирующее прилагательное, означает то, что форма, конструкция, измерение, значение, вычисление и т.д. может отклоняться от точной описанной геометрии, расстояния, измерения, значения, вычисления и т.д., вследствие неидеальностей в материалах, машинной обработке, изготовлении, измерениях модуля сбора данных, вычислениях, времени обработки, времени связи и т.д.
[53] Вычислительные устройства 105, в общем, включают в себя инструкции, выполняемые посредством одного или более вычислительных устройств, к примеру, идентифицированных выше, и для выполнения блоков или этапов процессов, описанных выше. Машиноисполняемые инструкции могут быть компилированы или интерпретированы из компьютерных программ, созданных с использованием множества языков и/или технологий программирования, включающих в себя, без ограничения и отдельно или в комбинации, Java™, C, C++, Visual Basic, Java Script, Perl, HTML и т.д. В общем, процессор (например, микропроцессор) принимает инструкции, например, из запоминающего устройства, машиночитаемого носителя и т.д. и выполняет эти инструкции, за счет этого выполняя один или более процессов, включающих в себя один или более процессов, описанных в данном документе. Такие инструкции и другие данные могут сохраняться и передаваться с использованием множества машиночитаемых носителей. Файл в вычислительном устройстве 105, в общем, представляет собой совокупность данных, сохраненных на машиночитаемом носителе, к примеру, на носителе хранения данных, в оперативном запоминающем устройстве и т.д.
[54] Машиночитаемый носитель включает в себя любой носитель, который участвует в предоставлении данных (например, инструкций), которые могут считываться посредством компьютера. Такой носитель может принимать множество форм, включающих в себя, но не только, энергонезависимые носители, энергозависимые носители и т.д. Энергонезависимые носители включают в себя, например, оптические или магнитные диски и другое постоянное запоминающее устройство. Энергозависимые носители включают в себя динамическое оперативное запоминающее устройство (DRAM), которое типично составляет основное запоминающее устройство. Общие формы машиночитаемых носителей включают в себя, например, гибкий диск, дискету, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM, DVD, любой другой оптический носитель, перфокарты, бумажную ленту, любую другую физическую среду с шаблонами отверстий, RAM, PROM, EPROM, флэш-EEPROM, любой другой кристалл или картридж запоминающего устройства либо любой другой носитель, с которого компьютер может выполнять считывание.
[55] Относительно носителей, процессов, систем, способов и т.д., описанных в данном документе, следует понимать, что хотя этапы таких процессов и т.д. описаны как осуществляемые согласно определенной упорядоченной последовательности, такие процессы могут осуществляться на практике с описанными этапами, выполняемыми в порядке, отличном от порядка, описанного в данном документе. Дополнительно следует понимать, что определенные этапы могут выполняться одновременно, что другие этапы могут добавляться, или что определенные этапы, описанные в данном документе, могут опускаться. Например, в процессе 500, один или более этапов могут опускаться, или этапы могут выполняться в порядке, отличном от порядка, показанного на фиг. 5. Другими словами, описания систем и/или процессов в данном документе предоставляются в целях иллюстрации конкретных вариантов осуществления и никоим образом не должны истолковываться так, чтобы ограничивать раскрытый предмет изобретения.
[56] Соответственно, следует понимать, что настоящее раскрытие сущности, включающее в себя вышеприведенное описание и прилагаемые чертежи и нижеприведенную формулу изобретения, имеет намерение быть иллюстративным, а не ограничивающим. Множество вариантов осуществления и вариантов применения, отличных от предоставленных примеров, должны быть очевидными для специалистов в данной области техники после прочтения вышеприведенного описания. Объем изобретения должен определяться не со ссылкой на вышеприведенное описание, а должен вместо этого определяться со ссылкой на формулу изобретения, прилагаемую к настоящему документу и/или включенную в непредварительную заявку на патент на его основе, наряду с полным объемом эквивалентов, на которые уполномочена такая формула изобретения. Предполагается и подразумевается, что будущие разработки должны осуществляться в областях техники, поясненных в данном документе, и что раскрытые системы и способы должны быть включены в такие будущие варианты осуществления. В общем, следует понимать, что раскрытый предмет изобретения допускает модификацию и варьирование.
[57] Употребление элементов или этапов в единственном числе не исключает их множества, если не указано иное или контекст не требует иного. Фраза "на основе" охватывает частично или полностью на основе.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЛУЧШЕННОЕ ПРЕДОТВРАЩЕНИЕ СТОЛКНОВЕНИЙ | 2015 |
|
RU2708534C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ПРЕДУПРЕЖДЕНИЯ О ПРИБЛИЖЕНИИ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2687395C2 |
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ | 2015 |
|
RU2706859C2 |
| СИСТЕМА И СПОСОБ ДЛЯ УЛУЧШЕННОГО ПРЕОДОЛЕНИЯ ИЗГИБОВ | 2015 |
|
RU2711403C2 |
| СИСТЕМА И СПОСОБ ДЛЯ УЛУЧШЕННОГО ОБНАРУЖЕНИЯ ПОВЕДЕНИЯ В ПРЕДЕЛАХ ПОЛОСЫ ДВИЖЕНИЯ | 2015 |
|
RU2710125C2 |
| ФУНКЦИОНИРОВАНИЕ ПОДНОЖКИ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2733553C2 |
| ИЗБЕГАНИЕ УДАРА В ДНИЩЕ КУЗОВА ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2707485C2 |
| УЛУЧШЕННАЯ РАБОТА СЕНСОРНОГО ЭКРАНА | 2015 |
|
RU2696978C1 |
| ОБНАРУЖЕНИЕ НАПРАВЛЕНИЯ ПОЛОСЫ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2711031C2 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ШТОРКОЙ РЕШЕТКИ РАДИАТОРА | 2017 |
|
RU2689911C2 |
Изобретение относится системам безопасности транспортного средства. Система уменьшения последствий и предотвращения столкновений содержит компьютер, включающий процессор и запоминающее устройство, хранящее инструкции, исполняемые процессором. Инструкции, исполняемые процессором, содержат этапы определения времени до столкновения и, на основе поперечного расстояния и продольного расстояния, минимального расстояния между поворачивающим рассматриваемым транспортным средством и каждой из множества целей, последующего выбора цели из множества целей на основе времени до столкновения и минимального расстояния, определения коэффициента угрозы для выбранной цели и приведения в действие компонента транспортного средства на основе коэффициента угрозы. Достигается повышение безопасности управления транспортным средством 2 н. и 18 з.п. ф-лы, 5 ил.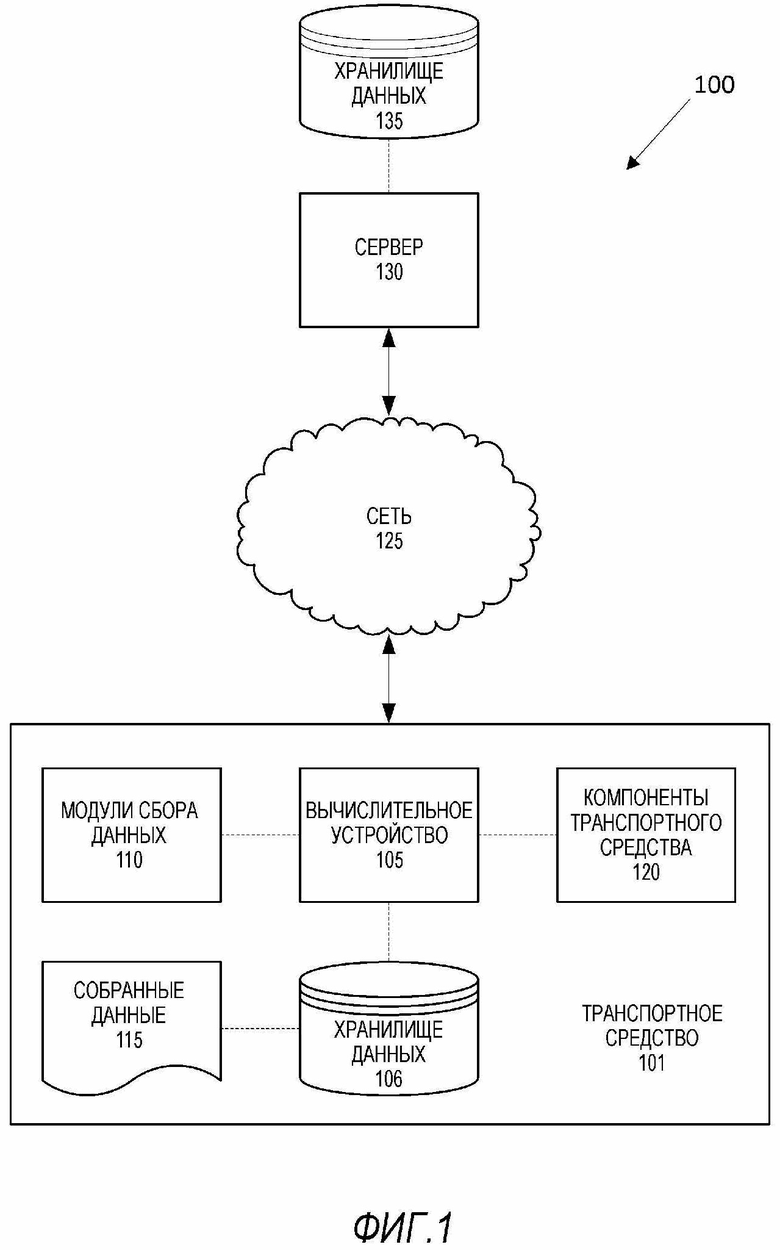
1. Система уменьшения последствий и предотвращения столкновений, содержащая компьютер, включающий процессор и запоминающее устройство, хранящее инструкции, исполняемые процессором для:
- определения времени до столкновения и, на основе поперечного расстояния и продольного расстояния, минимального расстояния между поворачивающим рассматриваемым транспортным средством и каждой из множества целей;
-последующего выбора цели из множества целей на основе времени до столкновения и минимального расстояния
- определение коэффициента угрозы для выбранной цели; и
- приведение в действие компонента транспортного средства на основе коэффициента угрозы.
2. Система по п. 1, в которой инструкции дополнительно включают инструкции для приведения в действие компонента транспортного средства, когда коэффициент угрозы выше порогового значения коэффициента угрозы.
3. Система по п. 1, в которой минимальное расстояние основано, по меньшей мере, частично на угловой скорости на повороте рассматриваемого транспортного средства.
4. Система по п. 1, в которой минимальное расстояние основано, по меньшей мере, частично на поперечной скорости цели и продольной скорости цели.
5. Система по п. 1, в которой минимальное расстояние основано, по меньшей мере, частично на поперечном ускорении цели и продольном ускорении цели.
6. Система по п. 1, в которой инструкции дополнительно включают инструкции для определения минимального расстояния для каждой из множества целей, по меньшей мере, частично на основе прогнозного расстояния между рассматриваемым транспортным средством и соответствующей целью в течение предварительно определенного периода времени.
7. Система по п. 1, в которой инструкции дополнительно включают инструкции для выбора цели из множества целей, когда минимальное расстояние между целью и рассматриваемым транспортным средством ниже порогового значения расстояния, и время до столкновения ниже порогового значения времени.
8. Система по п. 1, в которой инструкции дополнительно включают инструкции для определения минимального расстояния для каждой из множества целей, когда время до столкновения ниже порогового значения времени.
9. Система по п. 8, в которой инструкции дополнительно включают инструкции для выбора цели из множества целей, когда минимальное расстояние ниже порогового значения расстояния.
10. Система по п. 9, в которой инструкции дополнительно включают инструкции для приведения в действие компонента транспортного средства, когда коэффициент угрозы выше порогового значения коэффициента угрозы.
11. Способ уменьшения последствий и предотвращения столкновений, содержащий этапы, на которых:
- определяют время до столкновения и, на основе поперечного расстояния и продольного расстояния, минимальное расстояние между поворачивающим рассматриваемым транспортным средством и каждой из множества целей;
- затем выбирают цель из множества целей на основе времени до столкновения и минимального расстояния;
- определяют коэффициент угрозы для выбранной цели; и
- приводят в действие компонент транспортного средства на основе коэффициента угрозы.
12. Способ по п. 11, дополнительно содержащий этап, на котором приводят в действие компонент транспортного средства, когда коэффициент угрозы выше порогового значения коэффициента угрозы.
13. Способ по п. 11, в котором минимальное расстояние основано, по меньшей мере, частично на угловой скорости на повороте рассматриваемого транспортного средства.
14. Способ по п. 11, в котором минимальное расстояние основано, по меньшей мере, частично на поперечной скорости цели и продольной скорости цели.
15. Способ по п. 11, в котором минимальное расстояние основано, по меньшей мере, частично на поперечном ускорении цели и продольном ускорении цели.
16. Способ по п. 11, дополнительно содержащий этап, на котором определяют минимальное расстояние для каждой из множества целей на основе прогнозного расстояния между рассматриваемым транспортным средством и соответствующей целью в течение предварительно определенного периода времени.
17. Способ по п. 11, дополнительно содержащий этап, на котором выбирают цель из множества целей, когда минимальное расстояние между целью и рассматриваемым транспортным средством ниже порогового значения расстояния, и время до столкновения ниже порогового значения времени.
18. Способ по п. 11, дополнительно содержащий этап, на котором определяют минимальное расстояние для каждой из множества целей, когда время до столкновения ниже порогового значения времени.
19. Способ по п. 18, дополнительно содержащий этап, на котором выбирают цель из множества целей, когда минимальное расстояние ниже порогового значения расстояния.
20. Способ по п. 19, дополнительно содержащий этап, на котором приводят в действие компонент транспортного средства, когда коэффициент угрозы выше порогового значения коэффициента угрозы.
| US 9079587 B1, 14.07.2015 | |||
| US 6311123 B1, 30.10.2001 | |||
| СИСТЕМА ИДЕНТИФИКАЦИИ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ИДЕНТИФИКАЦИИ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2556774C1 |

