Изобретение относится к железнодорожному транспорту, а именно к способу регулирования электрической передачи тепловоза с автономным тепловым двигателем, тяговым генератором, электродвигателями постоянного тока и тормозными резисторами в режиме электрического торможения тепловоза.
Известен способ регулирования электропередачи тепловоза с автономным тепловым двигателем, тяговым генератором, электродвигателями постоянного тока и тормозными резисторами в режиме электрического торможения тепловоза, заключающийся в том, что тепловой двигатель приводит во вращение тяговый генератор, возбуждают тяговый генератор, нагружают тяговый генератор на обмотки возбуждения тяговых электродвигателей, возбуждают тяговые электродвигатели, нагружают и тяговые электродвигатели на тормозные резисторы, задают ток возбуждения возбудителя тягового генератора, устанавливают ток возбуждения тягового генератора, устанавливают ток возбуждения тяговых электродвигателей и регулируют тормозное усилие тепловоза (SU, авторское свидетельство №1477579, МПК B60L 7/04, опубликовано 07.05.1989 г.).
Недостатком способа является то, что способ не предусматривает ограничение тока электродвигателей по условиям коммутационной надежности работы электродвигателей и не обеспечивает стабильности тормозных характеристик из-за большого количества регулировок.
Известен способ регулирования электропередачи в режиме электрического торможения тепловоза с автономным тепловым двигателем, тяговым генератором, электродвигателями постоянного тока, тормозными резисторами, заключающийся в том, что задают частоту вращения теплового двигателя, приводящего во вращение тяговый генератор, возбуждают тяговый генератор, нагружают тяговый генератор на последовательно включенные обмотки возбуждения тяговых электродвигателей, возбуждают и тяговые электродвигатели, нагружают и тяговые электродвигатели на тормозные резисторы, задают уставку тормозного усилия тепловоза, задают уставку максимально допустимого тока возбуждения тяговых электродвигателей, задают уставку максимально допустимого тока тормозящего тягового электродвигателя, измеряют частоту вращения тяговых электродвигателей, выделяют сигнал, пропорциональный максимально измеренной частоте вращения одного из тяговых электродвигателей и по этой частоте задают уставку тока тормозящего тягового электродвигателя, при достижении которого обеспечиваются удовлетворительные потенциальные условия коммутации на коллекторе тягового двигателя, измеряют ток якоря тяговых электродвигателей и выделяют максимальный ток одного из тяговых электродвигателей, измеряют ток возбуждения тяговых электродвигателей, по измеренным значениям тока возбуждения и тока якоря тяговых электродвигателей определяют тормозное усилие тепловоза, сравнивают его с заданной уставкой тормозного усилия, сравнивают максимальный ток одного из тяговых электродвигателей с уставкой максимально допустимого тормозного тока и с уставкой тормозного тока по условиям коммутации, сравнивают уставку максимально допустимого тока возбуждения тяговых электродвигателей с измеренным значением тока возбуждения тяговых электродвигателей, дифференцируют сигнал, пропорциональный максимально измеренному току тягового электродвигателя и результат дифференцирования суммируют с максимальным значением одного из результатов сравнения, по найденному значению регулируют ток возбуждения тягового генератора и устанавливают ток возбуждения и ток торможения тяговых электродвигателей (И.В. Колесник, Т.Ф. Кузнецов и др. "Электропередачи тепловозов на переменно-постоянном токе" - М., Транспорт, 1978, с. 126-128).
Недостатком известного способа является то, что процессы в электрической передаче в режимах торможения имеют колебательный характер, большое количество регулировок ухудшает стабильность характеристик электрического торможения.
Известен способ регулирования электрической передачи тепловоза в режиме электрического тормоза, принятый за прототип, заключающийся в том, что задают частоту вращения теплового двигателя, приводящего во вращение синхронный тяговый генератор, возбуждают тяговый генератор, нагружают тяговый генератор через выпрямитель на последовательно включенные обмотки возбуждения тяговых электродвигателей, возбуждают и тяговые электродвигатели, нагружают и тяговые электродвигатели на тормозные резисторы, задают уставку тормозного усилия тепловоза, задают первую уставку тока возбуждения тяговых электродвигателей по максимально допустимому значению, задают первую уставку тока якорей тяговых электродвигателей по максимально допустимому значению, измеряют частоты вращения тяговых электродвигателей, выделяют максимальную частоту вращения одного из тяговых электродвигателей, измеряют токи якорей тяговых электродвигателей и выделяют максимальный ток якоря одного из тяговых электродвигателей, измеряют ток возбуждения тяговых электродвигателей, вычисляют обратное значение максимальной измеренной частоты вращения одного из тяговых электродвигателей, вычисленное значение нормируют и принимают за вторую уставку тока якорей тяговых электродвигателей, по величинам измеренного тока возбуждения тяговых электродвигателей и измеренного максимального тока якоря одного из тяговых электродвигателей и по известным характеристикам намагничивания тяговых электродвигателей вычисляют магнитный поток тяговых электродвигателей, вычисляют обратное значение магнитного потока тяговых электродвигателей, полученную величину перемножают с уставкой заданного тормозного усилия тепловоза, результат нормируют и принимают за третью уставку тока якорей тяговых электродвигателей, выделяют из уставок тока якорей тяговых электродвигателей минимальную уставку, принимают ее за заданное значение тока якорей тяговых электродвигателей, сравнивают с измеренным максимальным током якоря одного из тяговых электродвигателей, результат сравнения интегрируют и принимают за вторую уставку задания тока возбуждения тяговых электродвигателей, выделяют из уставок тока возбуждения минимальную уставку и принимают ее за заданное значение тока возбуждения тяговых электродвигателей, сравнивают ее с измеренным значением тока возбуждения тяговых электродвигателей, результат сравнения усиливают и осуществляют регулирование тока возбуждения тяговых электродвигателей (RU, патент на изобретение №2653351 С1, МПК B60L 11/06, опубл. 07.05.2018.).
Недостатком известного способа также является то, что при некоторых соотношениях веса тепловоза и состава может иметь место колебательный режим работы электрического тормоза тепловоза.
Техническим результатом изобретения является обеспечение устойчивой работы электрического тормоза тепловоза.
Указанный технический результат достигается тем, что в способе регулирования электрической передачи тепловоза в режиме электрического тормоза, заключающемся в том, что задают частоту вращения теплового двигателя, приводящего во вращение синхронный тяговый генератор, возбуждают тяговый генератор, нагружают тяговый генератор через выпрямитель на последовательно включенные обмотки возбуждения тяговых электродвигателей, возбуждают и тяговые электродвигатели, нагружают и тяговые электродвигатели на тормозные резисторы, задают уставку тормозного усилия тепловоза, задают первую уставку тока якорей тяговых электродвигателей по максимально допустимому значению, задают первую уставку тока возбуждения тяговых электродвигателей по максимально допустимому значению, измеряют токи якорей тяговых электродвигателей и выделяют максимальный ток якоря одного из тяговых электродвигателей, измеряют ток возбуждения тяговых электродвигателей, измеряют частоты вращения тяговых электродвигателей, выделяют максимальную частоту вращения одного из тяговых электродвигателей, вычисляют обратное значение максимальной измеренной частоты вращения одного из тяговых электродвигателей, вычисленное значение нормируют и принимают за вторую уставку тока якорей тяговых электродвигателей, выделяют из уставок тока якорей тяговых электродвигателей минимальную уставку, по величинам измеренных токов якорей каждого тягового электродвигателя вычисляют среднее значение тока якорей, по величине среднего значения тока якорей и по величине измеренного тока возбуждения тяговых электродвигателей и по известным характеристикам намагничивания тяговых электродвигателей вычисляют средний магнитный поток тяговых электродвигателей, минимальную из уставок тока якорей тяговых электродвигателей сравнивают с величиной выделенного максимального тока якоря одного из тяговых электродвигателей, результат сравнения перемножают с величиной вычисленного среднего магнитного потока тяговых электродвигателей, по результату перемножения корректируют уставку заданного тормозного усилия, скорректированную уставку заданного тормозного усилия сравнивают с результатом перемножения величин вычисленного среднего магнитного потока и среднего значения тока якорей, принятого за измеренное значение тормозного усилия, результат сравнения интегрируют во времени и полученный результат интегрирования принимают за вторую уставку тока возбуждения тяговых электродвигателей, выделяют из уставок тока возбуждения тяговых электродвигателей минимальную уставку и по ней осуществляют регулирование тока возбуждения тяговых электродвигателей, фиксируют момент времени, когда вторая уставка тока возбуждения тяговых электродвигателей становится больше первой, после чего осуществляют уменьшение величины сопротивления тормозного резистора пропорционально величине вычисленной разности второй и первой уставок тока возбуждения тяговых электродвигателей, вычисляют производную от измеренного значения тормозного усилия, нормируют и по полученному результату корректируют величину измеренного значения тормозного усилия.
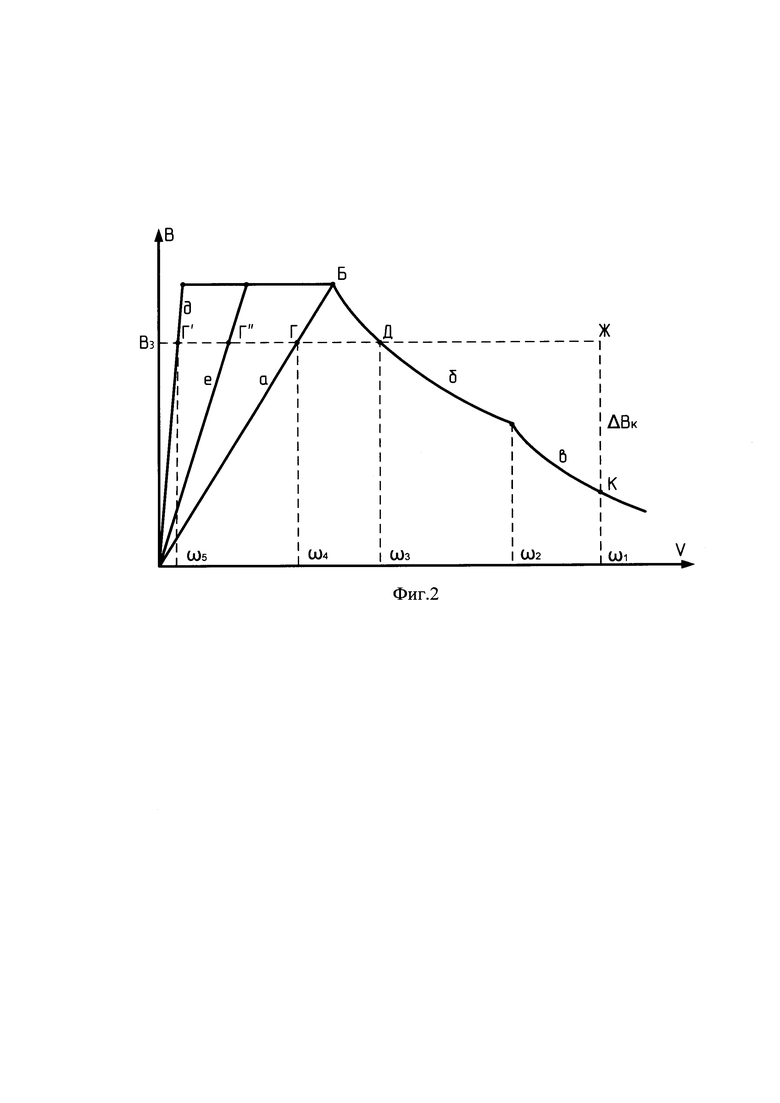
На Фиг. 1 представлена блок-схема устройства, реализующего способ.
На Фиг. 2 представлена тормозная характеристика тепловоза в режиме электрического торможения, реализуемая по предлагаемому способу.
Устройство (Фиг. 1) для реализации предлагаемого способа состоит из теплового двигателя 1, например, дизеля, механически связанного с тяговым синхронным генератором 2, выход которого подключен к выпрямителю 3, силовой выход выпрямителя 3 подключен к последовательно включенным обмоткам 4 возбуждения тяговых электродвигателей 5 через датчик 6 измерения тока возбуждения. Якоря 7 тяговых электродвигателей 5 подключены к тормозным резисторам 8 через датчики 9 тока якорей 7. На чертеже показаны два тяговых электродвигателя 5 с обмотками возбуждения 4 и якорями 7, в общем случае число тяговых электродвигателей равно числу обмоторенных осей тепловоза. Выходные валы якорей 7 тяговых электродвигателей 5 соединены с датчиками 10 частоты вращения. Выходы датчиков 9 тока якорей 7 соединены с входами блока 11 выделения максимального сигнала и вычисления среднего значения тока якорей 7 тяговых электродвигателей 5. Выходы датчиков 10 частоты вращения соединены с входами блока 12 выделения максимального сигнала. Выход задатчика 13 тормозного усилия соединен с первым входом блока 14 сравнения, выход блока 14 сравнения соединен с первым входом блока 15 сравнения, выход блока 15 сравнения соединен с входом интегратора 16, выход интегратора 16 соединен с первым входом блока 17 сравнения, второй вход блока 17 сравнения соединен с выходом задатчика 18 максимально допустимого тока возбуждения тяговых электродвигателей 5. Выход блока сравнения 17 соединен с входом блока 19 возбуждения тягового генератора 2, выход интегратора 16 соединен с первым входом блока 20 сравнения, второй вход блока 20 сравнения соединен с выходом задатчика 18 максимально дпустимого тока возбуждения тяговых электродвигателей 5, выход блока 20 соединен с устройством изменения сопротивления тормозных резисторов 8(на чертеже Фиг. 1 не показано). Выход датчика 6 тока возбуждения тяговых электродвигателей 5 соединен с первым входом функционального преобразователя 21, второй вход функционального преобразователя 21 соединен с первым выходом блока 11 выделения максимального сигнала и вычисления среднего значения тока якорей 7 тяговых электродвигателей 5 и соединен с первым входом блока 22 умножения, второй вход блока 22 умножения соединен с выходом функционального преобразователя 21. Выход блока 22 умножения соединен с входом дифференцирующего устройства 23 и первым входом сумматора 24, второй вход сумматора 24 соединен с выходом дифференцирующего устройства 23, выход сумматора 24 соединен со вторым входом блока 15 сравнения. Выход блока 12 выделения максимального сигнала соединен с блоком 25 вычисления обратной величины, выход блока 25 вычисления обратной величины соединен с первым входом блока 26 выделения минимального сигнала, второй вход блока 26 выделения минимального сигнала соединен с выходом задатчика 27 максимального тока якорей 7 тяговых электродвигателей 5, выход блока 26 выделения минимального сигнала соединен с первым входом блока 28 сравнения, второй вход блока 28 сравнения соединен со вторым выходом блока 11 выделения максимального сигнала и вычисления среднего значения тока якорей 7 тяговых электродвигателей 5, выход блока 28 сравнения соединен с первым входом блока 29 умножения, второй вход блока 29 умножения соединен с выходом функционального преобразователя 21, выход блока 29 умножения соединен со вторым входом блока 14 сравнения.
Способ осуществляется следующим образом.
Сигнал, пропорциональный величине заданного тормозного усилия, с выхода задатчика 13 тормозного усилия подают на первый вход блока 14 сравнения, на второй вход блока 14 подают сигнал с выхода блока умножения 29, который формирует сигнал коррекции заданного тормозного усилия в зависимости от сигналов ограничения по максимальному току Jяmax якорей 7 тяговых электродвигателей 5 или ограничения по фактору коммутации, которые формируются блоками 10, 12, 25, 26, 27, 28 и 29. При этом из измеренных датчиками 10 частоты вращения сигналов посредством блока 12 выделения максимального сигнала выделяют максимальное значение частоты вращения ωmax, в блоке 25 вычисления обратной величины для максимального значения частоты вращения определяют максимально допустимую величину Jк ограничения тока якорей 7 тяговых электродвигателей 5 по фактору коммутации в соответствии с выражением:

где: (Jя*ω)max - фактор коммутации, известный по паспортным данным конкретного тягового электродвигателя;
ωmax - максимальное значение частоты вращения;
Jк - максимально допустимая величина ограничения тока якорей тяговых электродвигателей по фактору коммутации
В блоке 26 выделения минимального сигнала сравнивают две величины: максимально допустимое значение тока якорей 7 тяговых электродвигателей 5, определяемое задатчиком 27 максимального тока якорей 7 тяговых электродвигателей 5, и вычисленное по (1) значение максимально допустимой величины Jк ограничения тока якорей 7 тяговых электродвигателей 5 по фактору коммутации. Таким образом, на выходе блока 26 выделения минимального сигнала получают промежуточную уставку Jпр, для которой справедливо следующее выражение:

где: Jпр - промежуточная уставка;
Jяmax - максимально допустимое значение тока якорей тяговых электродвигателей;
Jк - максимально допустимое значение тока якорей тяговых электродвигателей по фактору коммутации.
Величину промежуточной уставки Jпр сравнивают с максимальной величиной из измеренных токов якорей 7 тяговых электродвигателей 5, полученной на втором выходе блока 11 выделения максимального сигнала и вычисления среднего значения тока якорей 7 тяговых электродвигателей 5, результат сравнения при этом определяют в соответствии со следующим выражением:
ΔJя=Jяmaxи-Jпр, если Jяmахи>Jпр

где: Jяmaxи - максимальная величина из измеренных токов якорей тяговых электродвигателей;
ΔJя - результат на выходе блока 28 сравнения.
Результат сравнения ΔJя перемножают в блоке умножения 29 с величиной, пропорциональной магнитному потоку тяговых электродвигателей 7, полученной в функциональном преобразователе 21, в результате перемножения на выходе блока 29 умножения получают величину корректирующего сигнала по заданию тормозного усилия.

где: Kв - коэффициент масштабирования, известный их паспортных характеристик тяговых электродвигателей;
СФ - среднее значение коэффициента магнитного потока, вычисленного по измеренному току возбуждения тяговых электродвигателей, по среднему току якорей по известным характеристикам намагничивания тяговых электродвигателей.
В блоке 14 сравнения задание тормозного усилия Вз корректируют с учетом ΔВ в соответствии со следующим выражением:

где: Вз - задание тормозного усилия на выходе задатчика 13 тормозного усилия;
Взк - скорректированное задание тормозного усилия.
Блоки 14, 15, 16, 17, 19, 20, 21, 22, 23, 24 образуют регулятор тормозного усилия тепловоза, причем блок 14 сравнения является задатчиком скорректированного задания тормозного усилия тепловоза в соответствии с (5), с помощью блоков 21, 22 вычисляют величину фактической величины тормозного усилия в соответствии со следующим выражением:

где: Визм - фактическое значение тормозного усилия;
Jяcp - среднее значение тока якорей тяговых электродвигателей, которое вычисляют в блоке 11 выделения максимального сигнала и вычисления среднего значения тока якорей тяговых электродвигателей.
Для обеспечения устойчивости регулятора тормозного усилия сигнал обратной связи по тормозному усилию вычисляют в сумматоре 24 с учетом величины сигнала производной от фактического значения тормозного усилия, которую рассчитывают в дифференцирующем устройстве 23 в соответствии с выражением:

где: Вос - сигнал обратной связи по тормозному усилию;
dBизм/dt - производная от фактического значения тормозного усилия;
Кд - коэффициент масштабирования.
В блоке 15 сравнения определяют рассогласование ΔВ скорректированного задания тормозного усилия Взк и сигнала обратной связи по тормозному усилию Вос в соответствии с выражением:

после чего величину полученного рассогласования ΔВ интегрируют интегратором 16.
В зависимости от уровня выходного сигнала интегратора регулирование тормозного усилия тепловоза осуществляют по двум различным каналам.
Первый канал регулирования тормозного представлен на чертеже Фиг. 1 блоком 17 выделения минимального сигнала и блоком 19 возбуждения тягового генератора 2, причем этот канал работает исключительно в диапазоне изменения выходного сигнала интегратора 17 от нуля до величины максимально допустимого тока возбуждения тяговых электродвигателей, задаваемой посредством задатчика 18, и регулирование тормозного усилия осуществляют изменением тока возбуждения тяговых электродвигателей 5 с помощью блока 19 возбуждения тягового генератора 2.
Второй канал регулирования тормозного усилия, необходимый для расширения скоростного диапазона работы электрического тормоза тепловоза засчет уменьшения величины сопротивления тормозного резистора, включают, как только выходной сигнал интегратора 17 начинает превышать величину максимально допустимого тока возбуждения тяговых электродвигателей, заданного задатчиком 18. Ток возбуждения тяговых электродвигателей при работе второго канала регулирования тормозного усилия поддерживают равным максимально допустимому. При этом в блоке 20 сравнения вычисляют разницу между выходным сигналом интегратора 17 и выходным сигналом задатчика 18 максимально допустимого тока возбуждения тяговых электродвигателей 5 в соответствии с выражением:

где: ΔR - сигнал на изменение величины тормозного резистора;
Вых∫ - выходной сигнал интегратора 17;
Jвдmax - значение максимально допустимого тока возбуждения тяговых электродвигателей, определяемое задатчиком 18;
KR - масштабный коэффициент.
Рассмотрим работу электрической передачи тепловоза в режиме электрического тормоза с момента, когда скорость тепловоза соответствовала максимальной измеренной частоте вращения, равной ω1 (точка Ж на Фиг. 2). В этой точке на выходе блока 26 выделения минимального сигнала действует величина ограничения тока якоря по фактору коммутации Jк, и любое превышение максимальным из измеренных токов якорей 7 тяговых электродвигателей приводит к пропорциональному снижению значения заданного тормозного усилия в соответствии с выражением (5), на чертеже Фиг. 2 этой коррекции соответствует отрезок ЖК. При снижении частоты вращения от величины ω1 до ω2 рабочая точка перемещается по линии в до пересечения с линией б, на которой определяющим является ограничение максимально допустимого значения тока якорей 7 тяговых электродвигателей 5, определяемое задатчиком 27. В точке Д, соответствующей частоте вращения ω3, величина коррекции заданного тормозного усилия становится равной 0, далее регулирование тормозного усилия проводят путем изменения тока возбуждения тяговых электродвигателей, рабочая точка перемещается по линии ГД, соответствующей заданному тормозному усилию Вз. При дальнейшем снижении частоты вращения до величины ω4 (точка Г на чертеже Фиг. 2) ток возбуждения тяговых электродвигателей достигает своего максимума, определяемого задатчиком 18, и для дальнейшего поддержание заданного тормозного усилия Вз необходимо осуществлять посредством уменьшения величины сопротивления тормозных резисторов. Это может быть осуществлено, например, с помощью силового полупроводникового ключа, работающего в режиме широтно-импульсной модуляции. Точка Гʺ на отрезке Г'Г соответствует промежуточному значению сопротивления тормозных резисторов, а точка Г' на этом отрезке соответствует нулевому значению сопротивления тормозных резисторов, а частота вращения ω5 соответствует минимальной скорости тепловоза, до которой может быть осуществлено поддержание заданного тормозного усилия Вз.
В случае, когда тепловоз разгоняется и частота вращения увеличивается от значения ω5 до ω4, поддержание заданного тормозного усилия осуществляют в обратном порядке: сопротивление тормозных резисторов увеличивают от нуля до номинального значения, а затем в диапазоне частот вращения выше ω4 поддержание заданного тормозного усилия осуществляют соответствующим изменением тока возбуждения тяговых электродвигателей.
Предлагаемый способ испытан с применением микропроцессорной системы управления на стенде и показал положительные результаты.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования электрической передачи тепловоза в режиме электрического тормоза | 2017 |
|
RU2653351C1 |
| Способ регулирования электрической передачи тепловоза в режиме электрического тормоза | 2020 |
|
RU2750943C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА В РЕЖИМЕ ТОРМОЖЕНИЯ | 2005 |
|
RU2293031C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА В РЕЖИМЕ ТОРМОЖЕНИЯ | 2007 |
|
RU2350487C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРОДИНАМИЧЕСКОГО ТОРМОЗА ЛОКОМОТИВА | 2010 |
|
RU2432269C1 |
| Способ регулирования скорости движения тепловоза в режиме электрического торможения | 2017 |
|
RU2652481C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА В РЕЖИМЕ ТОРМОЖЕНИЯ | 2012 |
|
RU2501673C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2013 |
|
RU2520837C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2013 |
|
RU2534597C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2011 |
|
RU2454335C1 |

Изобретение относится к способу управления электротяговой системой транспортных средств. Способ регулирования электрической передачи тепловоза в режиме электрического тормоза заключается в следующем. Задают уставку тормозного усилия тепловоза, первую уставку тока якорей и первую уставку тока возбуждения. Выделяют максимальный ток якоря и максимальную частоту вращения одного из электродвигателей. Вычисляют обратное значение максимальной частоты вращения, вычисленное значение принимают за вторую уставку тока якорей. Минимальную из уставок тока якорей электродвигателей сравнивают с величиной максимального тока якоря, результат сравнения перемножают с величиной вычисленного среднего магнитного потока, по результату перемножения корректируют уставку заданного тормозного усилия. Скорректированную уставку заданного тормозного усилия сравнивают с результатом перемножения величин среднего магнитного потока и среднего значения тока якорей, результат сравнения интегрируют, и полученный результат принимают за вторую уставку тока возбуждения. Выделяют из уставок тока возбуждения минимальную уставку и по ней осуществляют регулирование тока возбуждения. Технический результат заключается в обеспечении устойчивой работы электрического тормоза тепловоза. 2 з.п. ф-лы, 2 ил.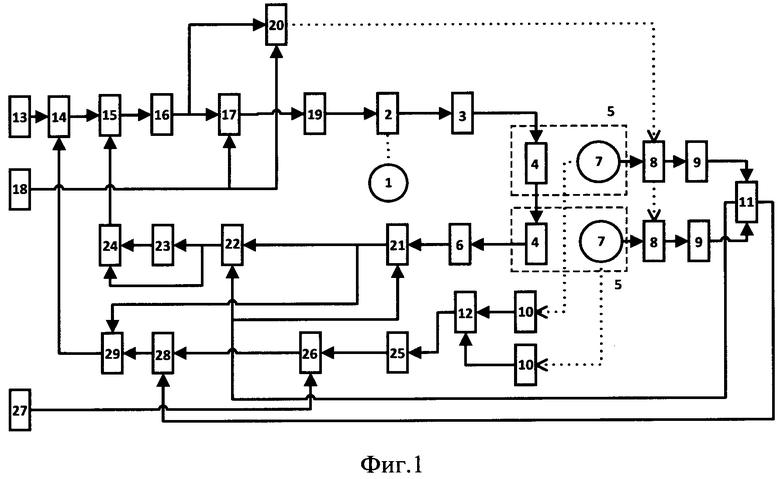
1. Способ регулирования электрической передачи тепловоза в режиме электрического тормоза, заключающийся в том, что задают частоту вращения теплового двигателя, приводящего во вращение синхронный тяговый генератор, возбуждают тяговый генератор, нагружают тяговый генератор через выпрямитель на последовательно включенные обмотки возбуждения тяговых электродвигателей, возбуждают и тяговые электродвигатели, нагружают и тяговые электродвигатели на тормозные резисторы, задают уставку тормозного усилия тепловоза, задают первую уставку тока якорей тяговых электродвигателей по максимально допустимому значению, задают первую уставку тока возбуждения тяговых электродвигателей по максимально допустимому значению, измеряют токи якорей тяговых электродвигателей и выделяют максимальный ток якоря одного из тяговых электродвигателей, измеряют ток возбуждения тяговых электродвигателей, измеряют частоты вращения тяговых электродвигателей, выделяют максимальную частоту вращения одного из тяговых электродвигателей, вычисляют обратное значение максимальной измеренной частоты вращения одного из тяговых электродвигателей, вычисленное значение нормируют и принимают за вторую уставку тока якорей тяговых электродвигателей, выделяют из уставок тока якорей тяговых электродвигателей минимальную уставку, отличающийся тем, что по величинам измеренных токов якорей каждого тягового электродвигателя вычисляют среднее значение тока якорей, по величине среднего значения тока якорей и по величине измеренного тока возбуждения тяговых электродвигателей и по известным характеристикам намагничивания тяговых электродвигателей вычисляют средний магнитный поток тяговых электродвигателей, минимальную из уставок тока якорей тяговых электродвигателей сравнивают с величиной выделенного максимального тока якоря одного из тяговых электродвигателей, результат сравнения перемножают с величиной вычисленного среднего магнитного потока тяговых электродвигателей, по результату перемножения корректируют уставку заданного тормозного усилия, скорректированную уставку заданного тормозного усилия сравнивают с результатом перемножения величин вычисленного среднего магнитного потока и среднего значения тока якорей, принятого за измеренное значение тормозного усилия, результат сравнения интегрируют во времени и полученный результат интегрирования принимают за вторую уставку тока возбуждения тяговых электродвигателей, выделяют из уставок тока возбуждения тяговых электродвигателей минимальную уставку и по ней осуществляют регулирование тока возбуждения тяговых электродвигателей.
2. Способ регулирования электрической передачи тепловоза в режиме электрического тормоза по п. 1, отличающийся тем, что фиксируют момент времени, когда вторая уставка тока возбуждения тяговых электродвигателей становится больше первой, после чего осуществляют уменьшение величины сопротивления тормозного резистора пропорционально вычисленной величине разности второй и первой уставок тока возбуждения тяговых электродвигателей.
3. Способ регулирования электрической передачи тепловоза в режиме электрического тормоза по пп. 1 и 2, отличающийся тем, что вычисляют производную от измеренного значения тормозного усилия, нормируют и по полученному результату корректируют величину измеренного значения тормозного усилия.
| Способ регулирования электрической передачи тепловоза в режиме электрического тормоза | 2017 |
|
RU2653351C1 |
| Способ регулирования скорости движения тепловоза в режиме электрического торможения | 2017 |
|
RU2652481C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА В РЕЖИМЕ ТОРМОЖЕНИЯ | 2007 |
|
RU2350487C1 |
| US 5747959 A, 05.05.1998. | |||

