Область техники, к которой относится изобретение
Настоящее раскрытие относится к роботу-пылесосу, который выполняет функцию очистки пола при автоматическом перемещении в конкретной области.
Описание известного уровня техники
В основном, роботы были созданы для промышленных целей, которые играют роль в автоматизации завода. За последнее время область применения роботов была расширена, и были созданы роботы для медицинских целей, роботы для космической навигации и т.д., и даже бытовые роботы, которые могут использоваться в обычных домах, были созданы.
Типичным примером бытовых роботов является робот-пылесос. Робот-пылесос выполняет функцию очистки пола при автоматическом перемещении в конкретной области. Например, бытовой робот-пылесос выполнен с возможностью всасывания пыли (включая инородные вещества) с пола или очистки пола при автоматическом перемещении внутри дома.
Такой робот-пылесос обычно включает в себя аккумуляторную батарею и различные датчики для обхода препятствия во время перемещения. Таким образом, робот-пылесос выполняет функцию очистки при автоматическом перемещении.
Для обеспечения плавного осуществления автоматического перемещения робота-пылесоса важно установить маршрут перемещения и определить препятствия на маршруте перемещения. Робот-пылесос может также выполнять функцию фотографирования или контроля внутренней части дома, используя характеристики его автоматического перемещения. Для выполнения вышеописанных функций различные датчики используются в роботе-пылесосе, но исследования оптимального конструктивного исполнения не являются еще удовлетворительными.
Кроме того, обычный робот-пылесос имеет конструкцию, в которой всасывающий узел расположен на нижнем участке корпуса пылесоса. Однако конструкция, в которой всасывающий узел встроен в корпус пылесоса, имеет проблемы, в которых всасывающая сила робота-пылесоса уменьшена, отсоединение щеточного валика невозможно и тому подобное. Соответственно, была предложена конструкция, в которой всасывающий узел расположен с возможностью выступа от корпуса пылесоса, как раскрыто в нижеследующих патентных документах. Однако конструкция имеет много недостатков, подлежащих решению, в том, что вероятность столкновения между всасывающим узлом и препятствие увеличена, всасывающий узел расположен в слепой зоне датчика, расположенного в корпусе пылесоса и тому подобное.
В конструкции, в которой пылесборник соединен с корпусом пылесоса, и крышка пылесборника соединена с пылесборником, очень важно точно собрать компоненты и легко осуществить сборку. Однако, изделие, имеющее данную конструкцию, еще не было создано.
Кроме того воздух, подаваемый в робот-пылесос, обычно проходит через высокоэффективный сухой воздушный фильтр для фильтрации тонкодисперсной пыли перед выпуском воздуха через выпускное отверстие. В существующих роботах-пылесосах имеется неудобство в том, что часть корпуса пылесоса необходимо отсоединить для замены или очистки высокоэффективного сухого воздушного фильтра.
Документы известного уровня техники
Патентный документ 1: публикация выложенного патента США № US 2013/0305484 A1 (опубликованная 21 ноября 2013 г.).
Патентный документ 2: публикация выложенного патента США № US 2013/0061420 A1 (опубликованная 14 марта 2013 г.).
Патентный документ 3: публикация выложенного патента США № US 2013/0061417 A1 (опубликованная 14 ноября 2013 г.).
Краткое описание изобретения
Следовательно, одной целью подробного описания является создание нового узла датчика, обеспечивающего минимизацию размеров части с датчиком, выполнение функции контроля/фотографирования спереди, функции одновременного определения места и составления карты, а также функции определения препятствия и повышения эффективности определения препятствия.
Другой целью подробного описания является создание всасывающего узла, обеспечивающего непосредственное определение столкновения с препятствием путем дополнения узла датчика, и определения заранее ступеньки или уступа с резким понижением, когда спереди пылесоса имеется ступенька.
Еще одной целью подробного описания является создание конструкции, в которой пылесборник может быть надежно закреплен к части для размещения пылесборника, причем удобство сборки корпуса пылесоса, пылесборника и крышки пылесборника также может быть улучшено.
Еще одной целью подробного описания является создание новой структуры потока в пылесборнике, которая может увеличить объем пылесборника, учитывая ограничение по высоте корпуса пылесоса.
Еще одной целью подробного описания является создание конструкции, в которой фильтр для фильтрации тонкодисперсной пыли можно легко заменять.
Для достижения этих и других преимуществ и в соответствии с целью данного описания изобретения, как воплощено и широко описано в данном документе, робот-пылесос включает в себя корпус пылесоса, включающий в себя узел колес для автономного перемещения, всасывающий узел, расположенный с возможностью выступа с одной стороны корпуса пылесоса, причем всасывающий узел всасывает воздух, содержащий пыль, узел датчика, расположенный на одной стороне корпуса пылесоса, пылесборник, размещенный в части для размещения пылесборника, имеющейся на другой стороне корпуса пылесоса, причем пылесборник собирает пыль, отфильтрованную из всасываемого воздуха, и крышку пылесборника, шарнирно соединенную с корпусом пылесоса для ее поворота, причем крышка пылесборника расположена для закрытия верхней поверхности пылесборника, когда крышка пылесборника соединена с пылесборником.
Для достижения этих и других преимуществ и в соответствии с целью данного описания изобретения, как воплощено и широко описано в данном документе, робот-пылесос включает в себя корпус пылесоса, включающий в себя узел колес, и контроллер, управляющий приведением в движение узла колес, всасывающий узел, расположенный с возможностью выступа с одной стороны корпуса пылесоса, причем всасывающий узел всасывает воздух, содержащий пыль, узел датчика, расположенный на другой стороне корпуса пылесоса, причем узел датчика включает в себя первый измерительный элемент, расположенный под наклоном относительно одной поверхности корпуса пылесоса, для одновременного фотографирования спереди и сверху от узла датчика, и второй измерительный элемент, расположенный в направлении, пересекающемся с направлением расположения первого измерительного элемента для восприятия препятствия, расположенного спереди.
Узел датчика может быть расположен с возможностью перекрытия с всасывающим узлом в направлении сверху вниз корпуса пылесоса.
Первый измерительный элемент может быть расположен в верхнем углу, в котором верхняя и боковая поверхности корпуса пылесоса стыкуются друг с другом.
Второй измерительный элемент может быть расположен у боковой поверхности корпуса пылесоса.
Контроллер может воспринимать текущее положение в области перемещения, используя верхнее изображение, сфотографированное первым измерительным элементом.
Контроллер может сравнивать изображения спереди, сфотографированные первым измерительным элементом в заданный интервал времени и вырабатывать сигнал управления, когда изображения спереди отличаются друг от друга.
Второй измерительный элемент может включать в себя элемент излучения первого шаблона, излучающий луч, имеющий первый шаблон, к передней нижней стороне, элемент излучения второго шаблона, излучающий луч, имеющий второй шаблон, к передней верхней стороне, и элемент получения изображений, фотографирующий лучи, имеющие первый и второй шаблоны, которые соответственно излучаются элементами излучения первого и второго шаблонов в заданной области фотографирования.
Элемент излучения первого шаблона, элемент излучения второго шаблона и элемент получения изображений могут быть расположены в линию в направлении сверху вниз корпуса пылесоса.
Элемент излучения первого шаблона может быть наклонен вниз относительно боковой поверхности корпуса пылесоса, и элемент излучения второго шаблона может быть наклонен вверх относительно боковой поверхности корпуса пылесоса.
Если определено, что лучи, имеющие первый и второй шаблоны, которые сфотографированы с помощью элемента получения изображений, были заблокированы или искажены, контроллер может определять, что препятствие расположено спереди, и управлять приведением в движение узла колес.
Область фотографирования может включать в себя область от пола до верхней части корпуса пылесоса.
Узел датчика может включать в себя часть с окошком, расположенную с возможностью перекрытия первого и второго измерительных элементов, причем часть с окошком выполнена из прозрачного материала, а также кожух, установленный в корпусе пылесоса для размещения в нем, по меньшей мере, части с окошком.
Часть с окошком может включать в себя первое окно, выполненное из прозрачного материала, причем первое окно расположено с возможностью перекрытия первого измерительного элемента, и второе окно, выполненное из полупрозрачного материала, причем второе окно расположено с возможностью перекрытия второго измерительного элемента.
Сквозное отверстие может быть образовано у части второго окна, которая соответствует первому измерительному элементу, а первое окно может быть смещено к сквозному отверстию.
Второе окно может включать в себя первую часть, имеющую сквозное отверстие, вторую часть, проходящую вниз под наклоном к первой части, причем вторая часть расположена с возможностью перекрытия элементов излучения первого и второго шаблонов, выступающую часть, выступающую вниз у второй части, причем выступающая часть закрыта кожухом, и третью часть, проходящую вниз у выступающей части для выступа от наружной стороны кожуха, причем третья часть расположена с возможностью перекрытия элемента получения изображений.
Для достижения этих и других преимуществ и в соответствии с целью данного описания изобретения, как воплощено и широко описано в данном документе, робот-пылесос включает в себя корпус, включающий в себя узел колес, контроллер, управляющий приведением в движение узла колес, и всасывающий узел, расположенный с возможностью выступа от одной стороны корпуса пылесоса, причем всасывающий узел всасывает воздух, содержащий пыль, причем всасывающий узел включает в себя кожух; и переключатель бампера, расположенный с возможностью перекрытия, по меньшей мере, одной поверхности кожуха, причем переключатель бампера находится под давлением, когда всасывающий узел находится в контакте с препятствием, для передачи сигнала контакта на контроллер.
Если сигнал контакта передается через переключатель бампера, контроллер может определять, что всасывающий узел столкнулся с препятствием, и управлять приведением в движение узла колес.
Переключатель бампера может включать в себя передний переключатель бампера, расположенный на передней стороне кожуха, и боковые переключатели бампера, соответственно, расположенные на обеих боковых сторонах кожуха.
Боковые переключатели бампера могут быть расположены с возможностью выступа в одном боковом направлении, и не быть расположенными на обеих сторонах корпуса пылесоса.
Переключатель бампера может включать в себя бампер, установленный в кожухе с возможностью его выхода на наружную сторону, причем бампер находится под давлением, когда всасывающий узел находится в контакте с препятствием, с возможностью его перемещения внутрь, и переключатель, расположенный на внутренней стороне бампера, причем переключатель находится под давлением, когда бампер перемещен внутрь, для вырабатывания электрического сигнала.
Переключатель бампера может дополнительно включать в себя упругий элемент, расположенный между бампером и кожухом для оказания давления на бампер.
Всасывающий узел может дополнительно включать в себя датчик уступа, расположенный на переднем конце нижней стороны кожуха, для определения топографии под ним.
Если определено с помощью датчика уступа, что топография под всасывающим узлом понижена до конкретного уровня или еще ниже, контроллер может управлять приведением в движение узла колес.
Всасывающий узел может дополнительно включать в себя терминал для зарядки, расположенный на переднем конце нижней стороны кожуха, для соединения с зарядной станцией.
Датчик уступа может иметься на обеих сторонах терминала для зарядки.
Кожух может включать в себя основной кожух, включающий в себя щеточный валик, выполненный с возможностью вращения в основном кожухе, и крышку кожуха, соединенную с возможностью съема с основным кожухом, для открытия/закрытия отверстия, образованного на одной стороне основного кожуха.
Всасывающий узел может дополнительно включать в себя элемент переключения, выполненный с возможностью переключения на основном кожухе, причем элемент переключения обеспечивает прикрепление крышки кожуха к основному кожуху с возможностью ее разблокировки при переключении.
Всасывающий узел может дополнительно включать в себя упругий элемент, расположенный на внутренней стороне другой стороны основного кожуха, причем упругий элемент упруго оказывает давление на щеточный валик.
Для достижения этих и других преимуществ и в соответствии с целью данного описания изобретения, как воплощено и широко описано в данном документе, робот-пылесос включает в себя корпус пылесоса, включающий в себя контроллер, причем корпус пылесоса имеет образованную в нем часть для размещения пылесборника, узел колес, установленный в корпусе пылесоса, причем приведение в движение узла колес управляется контроллером, всасывающий узел, установленный в корпусе пылесоса, для всасывания воздуха, содержащего пыль, пылесборник, соединенный с возможностью съема с частью для размещения пылесборника, причем пылесборник фильтрует и собирает пыль из всасываемого воздуха, и крышку пылесборника, включающую в себя шарнир, соединенный с возможностью поворота с корпусом пылесоса, причем крышка пылесборника соединена с возможностью съема с пылесборником для закрытия верхней поверхности пылесборника.
Пылесборник может быть выполнен с возможностью предотвращения его отсоединения от части для размещения пылесборника когда крышка пылесборника соединена с пылесборником.
Установочный выступ может быть образован для выступа от нижней поверхности части для размещения пылесборника. Установочная канавка, соответствующая установочному выступу, может быть образована на нижней поверхности пылесборника.
Утопленный участок может быть образован по наружной периферии части для размещения пылесборника в корпусе пылесоса. Часть крышки пылесборника может иметься на утопленном участке в положении, в котором крышка пылесборника соединена с пылесборником.
Метка совмещения может быть образована на верхней части пылесборника. Направляющая метка, соответствующая метке совмещения, может быть образована на утопленном участке.
Приемная канавка, вдавленная глубже утопленного участка, может быть образована на утопленном участке. Запирающий крючок, блокируемый на уступе приемной канавки, когда пылесборник размещен в части для размещения пылесборника, может быть образован с возможностью выступания от наружной периферии пылесборника.
Крышка пылесборника может включать в себя шарнир, соединенный с возможностью поворота с корпусом пылесоса. Шарнир может быть размещен в приемной канавке для размещения в положении, в котором крышка пылесборника соединена с пылесборником.
Запирающий крючок может быть образован с возможностью выступания от наружной периферии пылесборника. Уступ, блокируемый запирающим крючком, когда пылесборник размещен на части для размещения пылесборника, может быть образован на корпусе пылесоса.
В положении, в котором крышка пылесборника соединена с пылесборником, крышка пылесборника может быть расположена с возможностью перекрытия запирающего крючка.
Крышка пылесборника может включать в себя крючок, выполненный с возможностью закрепления с блокирующем узле пылесборника.
Блокирующий узел может быть открыт к задней стороне корпуса пылесоса.
Пылесборник может включать в себя часть для размещения ручки, образованную на верхней поверхности пылесборника, ручку, шарнирно соединенную с частью для размещения ручки для поворота ручки, причем ручка размещена на части для размещения ручки, и упругую часть, упруго оказывающую давление на ручку, так что ручка выступает под наклоном относительно верхней поверхности.
В положении, в котором крышка пылесборника соединена с пылесборником, ручка может прижиматься крышкой пылесборника для размещения ручки на части для размещения ручки.
Если соединение между крышкой пылесборника и пылесборником разъединено, крышка пылесборника может быть наклонена вверх под наклоном относительно пылесборника.
Если крышка пылесборника наклонена вверх под наклоном относительно пылесборника, приведение в движение узла колес может быть застопорено.
Крышка пылесборника может содержать сенсорную клавишу.
Крышка пылесборника может содержать сенсорный экран, который выводит визуальную информацию и обеспечивает сенсорный ввод для визуальной информации.
Крышка пылесборника может содержать дисплей, который выводит визуальную информацию.
Вспомогательная печатная плата, электрически соединенная с основной печатной платой, расположенной в корпусе пылесоса, расположена на внутренней стороне крышки пылесборника, и инфракрасное приемное устройство, которое принимает инфракрасный сигнал, может быть установлено на вспомогательной печатной плате.
Крышка пылесборника может быть расположена с возможностью ее выступания дальше, чем верхняя поверхность корпуса пылесоса, так что инфракрасное приемное устройство принимает инфракрасный сигнал, введенный через боковую поверхность крышки пылесборника.
Для достижения этих и других преимуществ и в соответствии с целью данного описания изобретения, как воплощено и широко описано в данном документе, робот-пылесос включает в себя корпус пылесоса, включающий в себя часть для размещения пылесборника, открытую назад и вверх, пылесборник, установленный с возможностью съема в части для размещения пылесборника через открытую вверх часть, причем пылесборник фильтрует и собирает пыль из всасываемого воздуха, и крышку пылесборника, включающую в себя шарнир, соединенный с возможностью поворота с корпусом пылесоса, причем крышка пылесборника соединена с возможностью съема с пылесборником для перекрытия верхней поверхности пылесборника, причем перемещение назад пылесборника заблокировано в положении, в котором пылесборник установлен в части для размещения пылесборника, причем перемещение вверх пылесборника заблокировано в положении, в котором крышка пылесборника закреплена на пылесборнике.
Для достижения этих и других преимуществ и в соответствии с целью данного описания изобретения, как воплощено и широко описано в данном документе, робот-пылесос включает в себя корпус пылесоса, включающий в себя контроллер, причем корпус пылесоса имеет образованную в нем часть для размещения пылесборника, узел колес, установленный в корпусе пылесоса, причем приведение в движение узла колес управляется контроллером, и пылесборник, соединенный с возможностью отсоединения с частью для размещения пылесборника, причем первое отверстие и второе отверстие расположены на одной и той же высоте на внутренней стенке части для размещения пылесборника, причем пылесборник включает в себя вход и выход, расположенные рядом по периферии пылесборника, причем вход и выход, соответственно, сообщаются с первым отверстием и вторым отверстием, когда пылесборник размещен на части для размещения пылесборника, и направляющая часть, проходящая вниз под наклоном по внутренней периферии пылесборника, причем направляющая часть отделяет поток воздуха, подаваемого на вход, от потока воздуха, выпускаемого к выходу для соответствующего направления его на нижний и верхний участки.
Вход может быть расположен под направляющей частью, так что воздух, подаваемый через вход, проходит на нижнюю часть направляющей части. Выход может быть расположен над направляющей частью, так что воздух, выпускаемый к выходу, проходит на верхнюю часть направляющей части.
Направляющая часть может проходить от верхней стороны входа к нижней стороне выхода.
Выход может быть образован непосредственно рядом с входом.
Направляющая часть может быть образована для блокировки между входом и выходом.
По меньшей мере, один циклон, фильтрующий пыль из воздуха, подаваемого в пылесборник, может иметься в пылесборнике.
Циклон может включать в себя первый циклон, фильтрующий пыль из воздуха, подаваемого через вход, и второй циклон, размещенный на части для размещения, образованной направляющим элементом, причем второй циклон расположен в первом циклоне для фильтрации тонкодисперсной пыли.
Робот-пылесос может дополнительно включать в себя фильтр, перекрывающий часть для размещения, для фильтрации пыли из воздуха, проходящего через второй циклон.
Фильтр может быть приклеен плотно к внутренней периферийной поверхности части для размещения.
Пустая полость, сообщающаяся с верхней частью направляющей части, может быть образована на наружной периферии фильтра, так что воздух, проходящий через фильтр, подается на верхнюю часть направляющей части.
Пылесборник может дополнительно включать в себя наружный кожух, включающий в себя вход, выход, часть для размещения и направляющую часть, причем наружный кожух размещает в себе первый и второй циклоны; верхний кожух, соединенный с верхней частью наружного кожуха, причем верхний кожух имеет верхнее отверстие, которое перекрывается с частью для размещения, и верхнюю крышку, соединенную с возможностью съема с верхним кожухом, для открытия/закрытия верхнего отверстия, причем верхняя крышка имеет фильтр, установленный на ее задней поверхности.
Для достижения этих и других преимуществ и в соответствии с целью данного описания изобретения, как воплощено и широко описано в данном документе, робот-пылесос включает в себя корпус пылесоса, имеющий образованную в нем часть для размещения пылесборника, и пылесборник, соединенный с возможностью съема с частью для размещения пылесборника, причем пылесборник включает в себя вход и выход, образованные на периферии пылесборника, причем вход и выход, соответственно, сообщаются с первым отверстием и вторым отверстием, которые образованы на внутренней стенке части для размещения пылесборника когда пылесборник размещен на части для размещения пылесборника, и направляющая часть, проходящая по внутренней периферии пылесборника, причем направляющая часть отделяет поток воздуха, подаваемого на вход, от потока воздуха, выпускаемого к выходу для соответствующего направления воздуха в нижнюю и верхнюю части пылесборника, первый циклон, фильтрующий пыль из воздуха, подаваемого через вход, второй циклон, размещенный на части для размещения, образованной направляющей частью, причем второй циклон расположен в первом циклоне для фильтрации тонкодисперсной пыли, и фильтр, перекрывающий часть для размещения, для фильтрации пыли из воздуха, проходящего через второй циклон.
Фильтр может быть приклеен плотно к верхней поверхности направляющей части или плотно приклеен к внутренней периферийной поверхности части для размещения.
Пустая полость, сообщающаяся с верхней частью направляющей части, может быть образована на наружной периферии фильтра, так что воздух, проходящий через фильтр, подается на верхнюю часть направляющей части.
Пылесборник может дополнительно включать в себя наружный кожух, включающий в себя вход, выход, часть для размещения и направляющую часть, причем наружный кожух размещает первый и второй циклоны; верхний кожух, соединенный с верхней частью наружного кожуха, причем верхний кожух включает в себя верхнее отверстие, которое перекрывается с частью для размещения, и верхнюю крышку, соединенную с возможностью съема с верхним кожухом, для открытия/закрытия верхнего отверстия, причем верхняя крышка имеет фильтр, установленный на ее задней поверхности.
Для достижения этих и других преимуществ и в соответствии с целью данного описания изобретения, как воплощено и широко описано в данном документе, робот-пылесос включает в себя корпус пылесоса, включающий в себя всасывающее отверстие и выпускное отверстие, и узел фильтра, размещенный в корпусе пылесоса, причем узел фильтра расположен спереди от всасывающего отверстия для фильтрации тонкодисперсной пыли, причем узел фильтра включает в себя корпус, включающий в себя часть для размещения фильтра, причем узел фильтра шарнирно соединен с корпусом пылесоса для его поворота, так что часть для размещения фильтра выходит на наружную сторону.
Часть для размещения пылесборника может быть образована в корпусе пылесоса, и выпускное отверстие может быть образовано на внутренней стенке корпуса пылесоса, образующего часть для размещения пылесборника.
Корпус фильтра может быть выполнен с возможностью его размещения в корпусе пылесоса через отверстие, образованное во внутренней стенке, и с возможностью образования части для размещения пылесборника вместе с внутренней стенкой в положении, в котором корпус фильтра размещен в корпусе пылесоса.
Корпус фильтра может быть расположен в части для размещения пылесборника в положении, в котором корпус фильтра повернут для открытия отверстия.
Вентиляционное отверстие, которое сообщается с частью для размещения фильтра и расположено для его выхода к выпускному отверстию, может быть образовано в корпусе фильтра.
Настоящее изобретение имеет следующие положительные результаты и функционирует следующим образом.
Во-первых, первый измерительный элемент расположен под наклоном относительно одной поверхности корпуса пылесоса для мгновенного фотографирования переднего и верхнего участков, и контроллер разделяет сфотографированное изображение на переднее и верхнее изображения в соответствии с объектами, отличающимися друг от друга. Таким образом, первый измерительный элемент может быть более эффективно использован, и имеющиеся измерительные элементы, предусмотренные для каждого объекта, могут быть интегрированы как одно целое.
Кроме того, второй измерительный элемент узла датчика включает в себя элементы излучения первого и второго шаблонов, которые соответственно, излучают лучи, имеющие первый и второй шаблоны, к передней нижней стороне и передней верхней стороне, и элемент получения изображений, который фотографирует лучи, имеющие первый и второй шаблоны, так что передний рельеф и препятствие сверху могут быть определены одновременно. В результате эффективность обхода препятствия робота-пылесоса может быть улучшена.
Кроме того, первый измерительный элемент и второй измерительный элемент интегрированы для образования одного модуля, называемого узлом датчика, так что можно создать робот-пылесос, имеющий новый тип восприятия.
Во-вторых, переключатель бампера, который включается механически, расположен на всасывающем узле, расположенном для выступа от одной стороны корпуса пылесоса, так что, когда всасывающий узел сталкивается с препятствием, столкновение может быть непосредственно определено. Кроме того, боковые переключатели бампера, соответственно расположенные на обеих сторонах всасывающего узла, расположены с возможностью выступания в боковом направлении обеих сторон корпуса пылесоса, так что столкновение с препятствием в боковом направлении может быть эффективно определено.
Если переключатели бампера скомбинированы с узлом датчика, еще более улучшенное определение препятствия и функция изменения направления, соответствующая ему, могут быть осуществлены.
Кроме того, датчик уступа установлен на наклонной части всасывающего узла, так что, когда ступень или уступ с резким перепадом рельефа имеются спереди, соответствующий процесс обхода может осуществляться заранее посредством определения ступени или уступа.
Кроме того, крышка кожуха всасывающего узла выполнена с возможностью открытия/закрытия отверстия основного кожуха, так что щеточный валик, встроенный в основной кожух, можно выдвигать на наружную сторону. Таким образом, щеточный валик можно более легко очищать.
В-третьих, пылесборник блокирован от перемещения назад за счет блокировочной конструкции между пылесборником и частью для размещения пылесборника в положении, в котором пылесборник установлен на части для размещения пылесборника, и блокирован от перемещения вверх в положении, в котором крышка пылесборника закреплена на пылесборнике. Таким образом, пылесборник может быть прочно закреплен на части для размещения пылесборника, и удобство сборки корпуса пылесоса, пылесборника и крышки пылесборника может быть повышено.
Кроме того, часть для размещения, которая расположена для перекрытия верхней части каждого из инфракрасных приемных устройств и имеет открытую переднюю сторону для приема инфракрасного света, выполнена на средней раме крышки пылесборника, так что можно предотвратить неисправную работу инфракрасного приемного устройства, вызванную трех-волновой лампой, расположенной на потолке, или солнечным освещением. Кроме того, боковая поверхность крышки пылесборника расположена с возможностью ее выступания дальше верхней поверхности корпуса пылесоса, так что эффективность приема инфракрасного приемного устройства может быть повышена.
В-четвертых, выход пылесборника образован на той же высоте, что и вход пылесборника, так что объем пылесборника может быть увеличен без увеличения высоты корпуса пылесоса. Кроме того, так как выход пылесборника образован непосредственно рядом с входом пылесборника, угол наклона вниз направляющей части, которая отделяет поток воздуха, подаваемого на вход, от потока воздуха, выпускаемого к выходу, для соответствующего направления на его нижний и верхний участки, уменьшен. Таким образом, воздух, подаваемый через вход, может образовывать достаточный вращающийся поток, и пыль, собранная в нижней части пылесборника может быть предотвращена от разлетания.
В-пятых, корпус фильтра шарнирно соединен с корпусом пылесоса для открытия/закрытия отверстия, образованного на внутренней стенке части для размещения пылесборника. Таким образом, корпус фильтра расположен на части для размещения пылесборника в положении, в котором корпус фильтра повернут для открытия отверстия, и часть для размещения фильтра выходит на наружную сторону, так что фильтр можно легко заменять.
Дополнительные возможности применимости настоящего изобретения станут более понятными из подробного описания, данного ниже. Однако следует понимать, что подробное описание и конкретные примеры при указании примеров осуществления изобретения даны только в качестве иллюстрации, поскольку различные изменения и модификации в пределах сущности и объема изобретения станут понятными для специалистов в данной области техники из подробного описания.
Краткое описание чертежей
Сопроводительные чертежи, которые включены для обеспечения дальнейшего понимания изобретения и составляют часть этого описания изобретения, иллюстрируют примеры осуществления и вместе с описанием служат для объяснения принципов изобретения.
На чертежах
фиг.1 - вид в изометрии примера робота-пылесоса в соответствии с примером осуществления;
фиг.2 - вид сверху робота-пылесоса, изображенного на фиг.1;
фиг.3 - вид сбоку робота-пылесоса, изображенного на фиг.1;
фиг.4 - вид узла датчика, изображенного на фиг.1;
фиг.5 - вид в изометрии с пространственным разделением элементов измерительного преобразователя, изображенного на фиг.4;
фиг.6 - вид, концептуально изображающий разрез узла датчика, изображенного на фиг.4;
фиг.7 - вид, показывающий отделение изображения, сфотографированного первым измерительным элементом, изображенным на фиг.6;
фиг.8 - вид, иллюстрирующий идею о том, что препятствие определяется вторым измерительным элементом, изображенным на фиг.4;
фиг.9 - блок-схема, показывающая основные элементы, относящиеся к обходу препятствия с использованием второго измерительного элемента;
фиг.10 - вид, показывающий диапазон излучения луча элементами излучения первого и второго шаблонов, и диапазон определения препятствия элемента получения изображений;
фиг.11 - вид, показывающий луч, имеющий первый шаблон, излучаемый элементом излучения первого шаблона;
фиг.12 - концептуальный вид, показывающий формы первого и второго шаблона лучей, излучаемых на каждое препятствие для каждой формы препятствия;
фиг.13 - вид всасывающего узла, изображенного на фиг.1;
фиг.14 - вид сбоку всасывающего узла, изображенного на фиг.13;
фиг.15 - вид спереди всасывающего узла, изображенного на фиг.13;
фиг.16 - вид нижнего участка всасывающего узла, изображенного на фиг.13;
фиг.17 - вид, иллюстрирующий идею о том, что щеточный валик выступает за счет манипуляции элементом переключения на всасывающем узле, изображенном на фиг.13;
фиг.18 - концептуальный вид, иллюстрирующий путь потока воздуха внутри робота-пылесоса, изображенного на фиг.1;
фиг.19 - вид, иллюстрирующий положение, в котором пылесборник установлен в части для размещения пылесборника в роботе-пылесосе, изображенном на фиг.1;
фиг.20 - вид пылесборника, изображенного на фиг.1;
фиг.21 - вид в изометрии с пространственным разделением элементов основных частей пылесборника, изображенного на фиг.20;
фиг.22 - вид снизу пылесборника, изображенного на фиг.20;
фиг.23 – вид, показывающий положение, в котором пылесборник установлен в части для размещения пылесборника, изображенном на фиг.19;
фиг.24 - вид спереди пылесборника, изображенного на фиг.20;
фиг.25 и 26 - виды в изометрии элемента для отделения потока, изображенного на фиг.24, с разных направлений;
фиг.27 - вид в разрезе по линии A-A на фиг.24;
фиг.28 - вид левой стороны пылесборника на фиг.20;
фиг.29 - концептуальный вид пылесборника на фиг.20 без верхнего кожуха;
фиг.30 - концептуальный вид положения, в котором верхний кожух и верхняя крышка отделены от пылесборника, изображенного на фиг.20;
фиг.31 - вид крышки пылесборника, изображенной на фиг.1;
фиг.32 - вид в изометрии с пространственным разделением элементов крышки пылесборника, изображенной на фиг.31;
фиг.33 - вид задней поверхности крышки пылесборника, изображенной на фиг.31;
фиг.34 - вид в разрезе конструкции, в которой крючок, изображенный на фиг.33, закреплен на пылесборнике;
фиг.35 - вид изнутри части для размещения пылесборника, изображенного на фиг.19;
фиг.36 - концептуальный вид положения, в котором узел фильтра, изображенный на фиг.35, повернут; и
фиг.37 - вид в изометрии с пространственным разделением элементов узла фильтра, изображенного на фиг.36.
Подробное описание примеров осуществления
Ниже будет дано подробное описание примеров осуществления изобретения со ссылкой на сопроводительные чертежи. Для краткого описания со ссылкой на чертежи одни и те же или эквивалентные компоненты будут содержать одни и те же ссылочные позиции, и их описание не будет повторено.
Ниже, робот-пылесос в соответствии с примером осуществления будет описан более подробно со ссылкой на сопроводительные чертежи.
Фиг.1 - вид в изометрии примера робота-пылесоса 100 в соответствии с примером осуществления, фиг.2 - вид сверху робота-пылесоса 100, изображенного на фиг.1, и фиг.3 - вид сбоку робота-пылесоса 100, изображенного на фиг.1.
Как показано на фиг.1-3, робот-пылесос 100 выполняет функцию очистки пола при автоматическом перемещении в конкретной области. В данном описании очистка пола включает в себя всасывание пыли (включая инородные вещества) с пола или очистку пола.
Робот-пылесос 100 включает в себя корпус 110 пылесоса, всасывающий узел 120, узел датчика 130 и пылесборник 140.
Корпус 110 пылесоса содержит контроллер (не показан) для управления роботом-пылесосом 100 и узел 111 колес для обеспечения перемещения робота-пылесоса 100. Робот-пылесос 100 может перемещаться во всех направлениях или поворачиваться с помощью узла 111 колес.
Узел 111 колес включает в себя основные колеса 111a и вспомогательное колесо 111b.
Основные колеса 111 соответственно расположены на обеих сторонах корпуса 110 пылесоса для поворота в одном направлении или другом направлении в соответствии с сигналом управления контроллера. Основные колеса 111a могут быть выполнены с возможностью приведения в движение независимо друг от друга. Например, основные колеса 111a могут приводиться в движение разными приводными электродвигателями, соответственно.
Вспомогательное колесо 111b поддерживает корпус 110 пылесоса вместе с основными колесами 111a и выполнено с возможностью облегчения перемещения робота-пылесоса 100 за счет основных колес 111a. Вспомогательное колесо 111b может быть также расположено на всасывающем узле 120, который будет описан ниже.
Как описано выше, контроллер управляет приведением в движение узла 111 колес, так что робот-пылесос 100 автоматически перемещается по полу.
При этом батарея 180, которая подает питание на робот-пылесос 100, установлена в корпусе 110 пылесоса. Батарея 180 является перезаряжаемой и может быть выполнена с возможностью закрепления/отсоединения с/от нижней поверхности корпуса 110 пылесоса.
Всасывающий узел 120 расположен с выступанием от одной стороны корпуса 110 пылесоса для всасывания воздуха, содержащего пыль. Эта одна сторона может быть стороной, на которой корпус 110 пылесоса перемещается в направлении F вперед, т.е. передней стороной корпуса 110 пылесоса.
На этих чертежах показано, что всасывающий узел 120 имеет форму, выступающую вперед, влево и вправо на одной стороне корпуса 110 пылесоса. В частности, передний конец всасывающего узла 120 выдвинут вперед на некоторое расстояние от одной стороны корпуса 110 пылесоса, и как левый, так и правый концы всасывающего узла 120 выдвинуты влево и вправо на некоторое расстояние от одной стороны корпуса 110 пылесоса, соответственно.
Так как корпус 110 пылесоса имеет круглую форму, и обе стороны заднего конца всасывающего узла 120 соответственно образованы с выступанием влево и вправо от корпуса 110 пылесоса, пустые области, т.е. зазоры, могут быть образованы между корпусом 110 пылесоса и всасывающим узлом 120. Пустые области расположены между как левым, так и правым концами корпуса 110 пылесоса, и как левым, так и правым концами всасывающего узла 120, и имеют форму, утопленную внутрь робота-пылесоса 100.
Когда препятствие входит в пустую область, может возникнуть проблема в том, что робот-пылесос 100 удерживается препятствием и не перемещается. Для предотвращения этой проблемы может быть предусмотрена крышка 129 для закрытия, по меньшей мере, одного участка пустой области. Крышка 129 может быть расположена на корпусе 110 пылесоса или всасывающем узле 120. В этом примере осуществления показано, что крышки 129 выступают от обеих сторон заднего конца всасывающего узла 120 для закрытия наружных периферийных поверхностей корпуса 110 пылесоса, соответственно.
Крышки 129 расположены для закрытия пустой области, т.е. по меньшей мере, одного участка пустых областей между корпусом 110 пылесоса и всасывающим узлом 120. Другими словами, крышка 129 расположена для закрытия, по меньшей мере, одного участка областей, утопленных внутрь между левой и правой наружными периферийными поверхностями корпуса 110 пылесоса, образованными кривой линией, и как левым, так и правым концами всасывающего узла 120, образованными для выступа от соответствующих левой и правой наружных периферийных поверхностей. Таким образом, можно осуществить конструкцию, обеспечивающую предотвращение удержания препятствия в пустой области или легкого избавления от препятствия, даже когда препятствие удерживается в пустой области.
Крышка 129, образованная для выступа от всасывающего узла 120, может поддерживаться наружной периферийной поверхностью корпуса 110 пылесоса. Когда крышка 129 образована для выступа от корпуса 110 пылесоса, крышка 129 может поддерживаться частью задней поверхности всасывающего узла 120. В соответствии с вышеописанной конструкцией, когда всасывающий узел 120 сталкивается с препятствием и получает удар от препятствия, часть удара передается корпусу 110 пылесоса, так что удар может распределяться.
Всасывающий узел 120 может быть соединен с возможностью съема с корпусом 110 пылесоса. Если всасывающий узел 120 отделен от корпуса 110 пылесоса, узел мокрой щетки (не показан) может быть соединен с возможностью съема с корпусом 110 пылесоса взамен отделенного всасывающего узла 120. Следовательно, когда пользователь хочет удалить пыль с пола, пользователь может установить всасывающий узел 120 на корпус 110 пылесоса. Когда пользователь хочет очистить пол, пользователь может установить узел мокрой щетки на корпус 110 пылесоса.
При установке всасывающего узла 120 на корпус 110 пылесоса установка может направляться крышками 129. То есть крышки 129 расположены для закрытия наружной периферийной поверхности корпуса 110 пылесоса, так что относительное положение всасывающего узла 120 относительно корпуса 110 пылесоса может быть определено.
Узел датчика 130 расположен на корпусе 110 пылесоса. Как показано на этих чертежах, узел датчика 130 может быть расположен на одной стороне корпуса 110 пылесоса, на которой расположен всасывающий узел 120, т.е. передней стороне корпуса 110 пылесоса. Узел датчика 130 может быть образован с возможностью выступа от верхней и боковой поверхностей корпуса 110 пылесоса, и верхний конец 134b1 узла датчика 130 образован в положении, выступающем вверх от верхней поверхности корпуса 110 пылесоса.
Узел датчика 130 может быть расположен с возможностью перекрытия с всасывающим узлом 120 в направлении сверху вниз корпуса 110 пылесоса. Узел датчика 130 расположен над всасывающим узлом 120 для определения препятствия или рельефа спереди него, так что всасывающий узел 120, расположенный спереди робота-пылесоса 100, не сталкивается с препятствием или неровностями рельефа.
Узел датчика 130 выполнен с возможностью дополнительного выполнения другой функции определения кроме вышеуказанной функции определения. Это будет описано подробно ниже.
Часть 113 для размещения пылесборника образована на корпусе 110 пылесоса, и пылесборник 140, который отделяет и собирает пыль из всасываемого воздуха, соединен с возможностью съема с частью 113 для размещения пылесборника. Как показано на этих чертежах, часть 113 для размещения пылесборника может быть образована на другой стороне корпуса 110 пылесоса, т.е. задней стороне корпуса 110 пылесоса. Часть 113 для размещения пылесборника имеет форму, открытую назад и вверх от корпуса 110 пылесоса. Часть 113 для размещения пылесборника может быть образована в форме, вдавленной к задней и передней сторонам корпуса 110 пылесоса.
Часть пылесборника 140 размещена в части 113 для размещения пылесборника. В этом случае другая часть пылесборника 140 может быть образована с возможностью выступа относительно задней стороны корпуса 110 пылесоса (т.е. в обратном направлении R, противоположном направлению F вперед).
Вход 140a (см. фиг.20), через который подается воздух, содержащий пыль, и выход 140b (см. фиг.20), через который выпускается воздух с отделенной от него пылью, образованы в пылесборнике 140. При установке пылесборника 140 на части 113 для размещения пылесборника вход 140a и выход 140b выполнены с возможностью соответствующего сообщения с первым отверстием 110a (см. фиг.19) и вторым отверстием 110b (см. фиг.19), которые образованы на внутренней стенке части 113 для размещения пылесборника.
Всасывающий канал потока в корпусе 110 пылесоса соответствует каналу потока от входного отверстия 110', сообщающегося с элементом 120bʺ для сообщения, к первому отверстию 110a, и выпускной канал потока в корпусе 110 пылесоса соответствует каналу потока от второго отверстия 110b к выпускному отверстию 112.
В соответствии с таким соединением воздух, содержащий пыль, который подается через всасывающий узел 120, подается в пылесборник 140 через всасывающий канал потока в корпусе 110 пылесоса, и воздух и пыль отделяются друг от друга посредством прохождения через, по меньшей мере, один циклон, установленный в пылесборнике 140. Пыль собирается в пылесборнике 140, и воздух выпускается из пылесборника 140 и затем, в конечном счете, выпускается на наружную сторону через выпускное отверстие 112 посредством прохождения через выпускной канал потока в корпусе 110 пылесоса.
Ниже, более подробно будет описан узел датчика 130.
Фиг.4 - вид узла датчика 130, изображенного на роботе-пылесосе 100 на фиг.1, фиг.5 - вид в изометрии с пространственным разделением элементов узла датчика 130, изображенного на фиг.4, и фиг.6 - вид, концептуально изображающий сечение узла датчика 130, изображенного на фиг.4. Для сведения на фиг.6 некоторые компоненты исключены или кратко показаны для удобства описания.
Как показано на фиг.4-6, узел датчика 130 включает в себя первый измерительный элемент 131 и второй измерительный элемент 132.
Первый измерительный элемент 131 расположен под наклоном относительно одной поверхности корпуса 110 пылесоса для одновременного фотографирования спереди и сверху от корпуса 110 пылесоса. Элемент получения изображений может быть использован как первый измерительный элемент 131. При этом одна поверхность корпуса 110 пылесоса может стать поверхностью пола в качестве поверхности, параллельной полу (это могут быть верхняя или боковые поверхности корпуса 110 пылесоса) и первый измерительный элемент 131 может быть расположен под углом 30° наклона относительно верхней поверхности корпуса 110 пылесоса.
Первый измерительный элемент 131 может быть расположен на верхнем угловом участке, на котором верхняя и боковая поверхности корпуса 110 пылесоса стыкуются друг с другом. На этих чертежах показано, что первый измерительный элемент 131 расположен на среднем верхнем угловом участке корпуса 110 пылесоса для наклона относительно каждой из верхней и боковой поверхностей корпуса 110 пылесоса.
Так как первый измерительный элемент 131 расположен под наклоном в диапазоне острых углов относительно одной поверхности корпуса 110 пылесоса, первый измерительный элемент 131 выполнен с возможностью одновременного фотографирования спереди и сверху корпуса 110 пылесоса.
Фиг.7 иллюстрирует принцип, по которому изображение, сфотографированное первым измерительным элементом 131, разделено на переднее изображение A и верхнее изображение B.
Как показано на фиг.7, переднее изображение A и верхнее изображение B, которые сфотографированы первым измерительным элементом 131, могут быть разделены на основании угла α обзора в направлении сверху вниз (т.е. вертикальном направлении) первого измерительного элемента 131. То есть изображение, соответствующее части α1 угла α обзора на сфотографированном изображении A+B может распознаваться как переднее изображение A, и изображение, соответствующее другой части α2 угла α обзора на сфотографированном изображении A+B, может распознаваться как верхнее изображение B. Как показано на фиг.6, угол α обзора может быть тупым углом.
Переднее изображение A, сфотографированное первым измерительным элементом 131, используется для контроля передней стороны в реальном времени. Например, когда робот-пылесос 100 используется для бытовых целей, переднее изображение A, сфотографированное первым измерительным элементом 131, может быть использовано для контроля несанкционированного входа в пустой дом или передачи изображения внутренней части дома на электронное устройство (например, терминал мобильной связи, имеющийся у пользователя) через удаленное подключение.
При использовании переднего изображения A, сфотографированного первым измерительным элементом 131, для контроля несанкционированного входа в пустой дом, может осуществляться следующее управление. Контроллер может сравнивать передние изображения A, сфотографированные первым измерительным элементом 131 в заданный интервал времени. Когда передние изображения A отличаются друг от друга, контроллер может генерировать сигнал управления. Управление может осуществляться в положении, в котором корпус 110 пылесоса остановлен. Сигналом управления может быть звуковой аварийный выходной сигнал или сигнал передачи, который выдает сообщение, сфотографированное переднее изображение и тому подобное на электронное устройство через удаленное подключение.
При использовании переднего изображения A, сфотографированного первым измерительным элементом 131, для выдачи изображения внутренней части дома на электронное устройство, может осуществляться следующее управление. Если сигнал запроса изображения получен с электронного устройства через удаленное подключение, контроллер может отделять переднее изображение A от изображения, сфотографированного первым измерительным элементом 131 и передавать переднее изображение A на электронное устройство. Контроллер может быть выполнен с возможностью перемещения в конкретное положение посредством управления приведением в движение узла 111 колес и затем передачи переднего изображения в соответствующем положении на электронное устройство. Для той цели, как показано на фиг.6, угол α обзора может иметь диапазон, в котором первый измерительный элемент 131 может фотографировать верхнее изображение B, включая потолок.
Верхнее изображение B, сфотографированное первым измерительным элементом 131, используется для создания карты области перемещения и определения текущего положения в области перемещения. Например, когда робот-пылесос 100 используется для бытовых целей, контроллер может создавать карту области перемещения, используя границу между потолком и боковой поверхностью на верхнем изображении B, сфотографированном первым измерительным элементом 131, и определять текущее положение в области перемещения на основании основных характерных точек верхнего изображения B.
Контроллер может использовать не только верхнее изображение B, но также переднее изображение A вместе с верхним изображением B для создания карты области перемещения и определения текущего положения в области перемещения.
Второй измерительный элемент 132 расположен в направлении, пересекающем направление расположения первого измерительного элемента 131, для определения препятствия или особенности рельефа, расположенной спереди него. На этих чертежах показано, что второй измерительный элемент 132 расположен в направлении сверху вниз на боковой поверхности корпуса 110 пылесоса.
Второй измерительный элемент 132 включает в себя элемент 132a излучения первого шаблона, элемент 132b излучения второго шаблона и элемент 132c получения изображений.
Элемент 132a излучения первого шаблона выполнен с возможностью излучения луча, имеющего первый шаблон, к передней нижней стороне робота-пылесоса 100, и элемент 132b излучения второго шаблона выполнен с возможностью излучения луча, имеющего второй шаблон, к передней верхней стороне робота-пылесоса 100. Элемент 132a излучения первого шаблона и элемент 132b излучения второго шаблона могут быть расположены на линии в направлении сверху вниз. На этих чертежах показано, что элемент 132b излучения второго шаблона расположен под элементом 132a излучения первого шаблона.
Элемент 132c получения изображений выполнен с возможностью фотографирования в заданной области фотосъемки, причем лучи имеют первый и второй шаблоны, которые соответственно излучаются элементом 132a излучения первого шаблона и элементом 132b излучения второго шаблона. Заданная область фотосъемки включает в себя область от пола до верхнего конца робота-пылесоса 100. Таким образом, робот-пылесос 100 может определять препятствие спереди себя, и возможно предотвращать столкновение робота-пылесоса 100 с препятствием или натыкание робота-пылесоса 100 на препятствие на его верхнем участке.
Заданная область фотосъемки может быть, например, областью в пределах угла обзора 105° в направлении сверху вниз (т.е. вертикальном направлении), угла обзора 135° в направлении слева направо (т.е. горизонтальном направлении) и передней стороны 25 м. Заданная область фотосъемки может изменяться в зависимости от различных факторов, таких как установочные положения элементов 132a и 132b излучения первого и второго шаблонов, углы излучения элементов 132a и 132b излучения первого и второго шаблонов и высота робота-пылесоса 100.
Элемент 132a излучения первого шаблона, элемент 132b излучения второго шаблона и элемент 132c получения изображений могут быть расположены на линии в направлении сверху вниз корпуса 110 пылесоса. На этих чертежах показано, что элемент 132c получения изображений расположен под элементом 132b излучения второго шаблона.
Элемент 132a излучения первого шаблона расположен с наклоном вниз относительно боковой поверхности корпуса 110 пылесоса, и элемент 132b излучения второго шаблона расположен с наклоном вверх относительно боковой поверхности корпуса 110 пылесоса.
Фиг.8 - вид, иллюстрирующий идею о том, что препятствие определяется вторым измерительным элементом 132, изображенным на фиг.4.
Прежде всего, как показано на фиг.8(a) элемент 132a излучения первого шаблона и элемент 132b излучения второго шаблона выполнены с возможностью соответствующего излучения лучей, имеющих первый и второй шаблоны, которые имеют форму, проходящую в, по меньшей мере, одном направлении. На этом чертеже показано, что элемент 132a излучения первого шаблона излучает линейные лучи, пересекающиеся друг с другом, и элемент 132b излучения второго шаблона излучает единственный линейный луч. Соответственно, самый нижний луч используется для определения препятствия на нижнем участке, самый верхний луч используется для определения препятствия на верхнем участке, и средний луч между самым нижним лучом и самым верхним лучом используется для определения препятствия на среднем участке.
Например, как показано на фиг.8(b), когда препятствие O расположено спереди, самый нижний луч и часть среднего луча могут прерываться или искажаться препятствием O. При определении такого прерывания или искажения элемент 132c получения изображений передает сигнал определения препятствия на контроллер.
Если сигнал определения препятствия получен, контроллер определяет то, что имеется препятствие O, и управляет приведением в движение узла 111 колес. Например, контроллер может прикладывать движущую силу в противоположном направлении к основным колесам 111a, так что робот-пылесос 100 перемещается назад. В качестве альтернативы, контроллер может прикладывать движущую силу только к одному из основных колес 111a, так что робот-пылесос 100 поворачивается, или прикладывать движущую силу к обоим основным колесам 111a в направлениях, отличных друг от друга.
Ниже будет описана более подробно о том, что препятствие определяется вторым измерительным элементом 132.
Фиг.9 - блок-схема, показывающая основные части, связанные с обхождением препятствия с использованием второго измерительного элемента 132.
Робот-пылесос 100 включает в себя узел 111 колес, элемент 191 данных, второй измерительный элемент 132 и контроллер 190, который управляет всей работой.
Контроллер 190 может включать в себя контроллер 190c перемещения, который управляет узлом 111 колес. Так как левое основное колесо 111a и правое основное колесо 111a приводятся в движение независимо контроллером 190c перемещения, робот-пылесос 100 перемещается по прямой или с поворотом. Для этой цели приводной электродвигатель, приведение в движение которого управляется в соответствии с командой управления контроллера 190c перемещения, может быть соединен с каждым из левого основного колеса 111a и правого основного колеса 111a.
Кроме того, контроллер 190 может включать в себя элемент 190a определения шаблона, который определяет шаблон в соответствии с анализом данных, введенных со второго измерительного элемента 132, и элемент 190b получения информации о препятствии, который определяет, имеется ли препятствие на основании выявленного шаблона.
Элемент 190a определения шаблона определяет шаблоны P1 и P2 лучей с изображения (полученного изображения), полученного элементом 132 получения изображения. Элемент 190a определения шаблона может определять элементы точек, линий, поверхностей и тому подобного относительно определенных элементов изображения, образующих полученное изображение, и определять шаблоны P1 и P2 лучей или точки, линии, поверхности и тому подобное, которые образуют шаблоны P1 и P2 лучей.
Элемент 190b получения информации о препятствии определяет, имеется ли препятствие на основании шаблонов, выявленных элементом 190a определения шаблона, и определяет форму препятствия.
Элемент 191 данных хранит референсные данные, которые хранят полученное изображение, введенное со второго измерительного элемента 132, и обеспечивает определение элементом 190b получения информации о препятствии, существует ли препятствие. Элемент 191 данных хранит информацию об определенном препятствии. Кроме того, элемент 191 данных хранит данные управления для управления работой робота-пылесоса 100 и данные, соответствующие режиму очистки робота-пылесоса 100. Элемент 191 данных хранит карту, созданную или полученную извне.
Кроме того, элемент 191 данных хранит данные, доступные для чтения микропроцессором, и может включать в себя накопитель на жестких магнитных дисках (HDD), твердотельный диск (SSD), накопитель на кремниевых дисках (SDD), постоянную память, оперативную память, компакт-диск «только для чтения», ленту для магнитной записи, дискету и оптическое устройство хранения данных.
Второй измерительный элемент 132 включает в себя элемент 132a излучения первого шаблона, элемент 132b излучения второго шаблона и элемент 132c получения изображений.
Второй измерительный элемент 132 установлен на передней стороне корпуса 110 пылесоса. Во втором измерительном элементе 132 элементы 132a и 132b излучения первого шаблона и второго шаблона излучают лучи P1 и P2, имеющие первый и второй шаблоны, на переднюю сторону робота-пылесоса 100, и элемент 132c получения изображений получает изображение посредством фотографирования излученных лучей, имеющих шаблоны.
Контроллер 190 хранит полученное изображение в элементе 191 данных, и элемент 190a определения шаблона извлекает шаблон путем анализа полученного изображения. То есть элемент 190a определения шаблона извлекает шаблон луча, полученный путем излучения луча, имеющего шаблон, которое излучается элементом 132a излучения первого шаблона или элементом 132b излучения второго шаблона на пол или препятствие. Элемент 190b получения информации о препятствии определяет, существует ли препятствие на основании извлеченного шаблона луча.
Контроллер 190 определяет, существует ли препятствие за счет полученного изображения, введенного со второго измерительного элемента 132, и управляет узлом 111 колес для перемещения при обходе препятствия путем изменения направления перемещения или маршрута перемещения.
Когда имеется уступ в окрестности робота-пылесоса 100, робот-пылесос 100 может упасть с уступа. Следовательно, контроллер 190 может определять уступ с помощью полученного изображения и повторно подтверждать, имеется ли уступ, с помощью датчика 124 уступа, для управления перемещением робота-пылесоса 100, так что робот-пылесос 100 не падает с уступа. Когда определено, что уступ существует, контроллер 190 может управлять узлом 111 колес для перемещения вдоль уступа посредством определения изменения шаблона луча за счет полученного изображения.
Кроме того, когда перемещение робота-пылесоса 100 ограничено вследствие множества препятствий, имеющихся в области, имеющей конкретный размер или меньше, контроллер 190 может определять находится ли робот-пылесос 100 в ограниченном пространстве, и устанавливать режим выхода, так что робот-пылесос 100 избегает ограниченного пространства.
Контроллер 190 может обеспечивать избегание роботом-пылесосом 100 ограниченного пространства посредством определения обходного пути на основании информации о каждом препятствии вокруг робота-пылесоса 100 в соответствии с тем, является ли режим, установленный на данный момент основным режимом или режимом быстрой очистки.
Например, в основном режиме контроллер 190 может создавать карту периферийной области путем получения информации обо всех препятствиях вокруг робота-пылесоса 100 и затем устанавливать обходной путь. В режиме быстрой очистки контроллер 190 может устанавливать обходной путь посредством определения того, должен ли робот-пылесос 100 проходить между определенными препятствиями на основании данных о расстоянии между ними.
Контроллер определяет расстояние между определенными препятствиями путем анализа шаблона луча полученного изображения относительно определенных препятствий и определяет, что робот-пылесос 100 должен перемещаться и проходить между препятствиями, когда расстояние является заданным значением или больше, для управления перемещением робота-пылесоса 100. Таким образом, контроллер 190 помогает роботу-пылесосу 100 избегать ограниченного пространства.
Фиг.10 - вид, показывающий диапазон излучения лучей элементами 132a и 132b излучения первого шаблона и второго шаблона и диапазон определения препятствия элемента 132c получения изображений.
Как показано на фиг.10, каждый из элементов 132a и 132b излучения первого шаблона и второго шаблона может включать в себя лучевой источник и оптический проекционный элемент изображения (OPPE), который генерирует луч, имеющий заданный шаблон, когда луч, излучаемый лучевым источником, передается через него.
Лучевой источник может быть лазерным диодом (LD), светоизлучающим диодом (LED) или тому подобным. Поскольку лазерный луч имеет характеристики монохроматичности, прямолинейности и связности, лазерный диод использовать лучше, чем остальные лучевые источники и он, таким образом, может точно измерять расстояние. В частности, поскольку инфракрасный или видимый луч имеет большое отклонение по точности измерения расстояния в зависимости от факторов, таких как цвет и материал препятствия, лазерный диод предпочтительно используется в качестве лучевого источника.
Генератор шаблонов может включать в себя линзу и дифракционный оптический элемент (DOE). Лучи, имеющие различные шаблоны, могут излучаться в соответствии с конфигурацией генератора шаблонов, расположенного в каждом из элементов 132a и 132b излучения первого шаблона и второго шаблона.
Элемент 132a излучения первого шаблона может излучать луч P1, имеющий первый шаблон (ниже, называемый лучом первого шаблона), к передней нижней стороне робота-пылесоса 100. Следовательно, луч P1 первого шаблона может попадать на пол области очистки.
Луч P1 первого шаблона может быть образован в форме горизонтальной линии. Кроме того, луч P1 первого шаблона может быть образован в форме шаблона крест-накрест, в котором горизонтальная линия и вертикальная линия пересекаются друг с другом.
Элемент 132a излучения первого шаблона, элемент 132b излучения второго шаблона и элемент 132c получения изображений могут быть расположены вертикально на линии. В этом примере осуществления показано, что элемент 132c получения изображений расположен под элементом 132a излучения первого шаблона и элементом 132ab излучения второго шаблона. Однако настоящее раскрытие не обязательно ограничивается этим, и элемент 132c получения изображений может быть расположен над элементом 132a излучения первого шаблона и элементом 132b излучения второго шаблона.
В примере осуществления элемент 132a излучения первого шаблона может определять препятствие, расположенное ниже элемента 132a излучения первого шаблона посредством излучения вниз луча P1 первого шаблона, к передней стороне, и элемент 132b излучения второго шаблона может быть расположен на нижней стороне элемента 132a излучения первого шаблона для излучения вверх луча P2, имеющего второй шаблон (в дальнейшем, называемого лучом второго шаблона), к передней стороне. Следовательно, луч P2 второго шаблона может попадать на препятствие или конкретный участок препятствия, который расположен выше, чем, по меньшей мере, элемент 132b излучения второго шаблона от пола области очистки.
Луч P2 второго шаблона может иметь шаблон, отличный от шаблона луча P1 первого шаблона, и предпочтительно может включать в шаблон горизонтальной линии. В данном документе горизонтальная линия не обязательно является непрерывным отрезком прямой, и может быть образована в виде пунктирной линии.
При этом, горизонтальный угол излучения луча P1 первого шаблона, излучаемого элементом 132a излучения первого шаблона (т.е. угол, образованный обоими концами луча P1 первого шаблона и элементом 132a излучения второго шаблона), предпочтительно может быть определен в диапазоне 130-140°, но настоящее раскрытие не обязательно ограничивается этим. Луч P1 первого шаблона может быть образован в форме, симметричной относительно передней стороны робота-пылесоса 100.
Подобно элементу 132a излучения первого шаблона горизонтальный угол излучения элемента 132b излучения второго шаблона предпочтительно может быть образован в диапазоне 130-140°. В некоторых примерах осуществления элемент 132b излучения второго шаблона может излучать луч P2 второго шаблона под одним и тем же горизонтальным углом излучения, что и элемент 132a излучения первого шаблона. В этом случае луч P2 второго шаблона может быть также образован в форме, симметричной относительно передней стороны робота-пылесоса 100.
Элемент 132c получения изображений может получать изображение передней стороны робота-пылесоса 100. В частности, лучи P1 и P2 шаблонов показаны на изображении, полученном элементом 132c получения изображений (в дальнейшем, называемом полученным изображением). В дальнейшем, изображения лучей P1 и P2 шаблонов, показанных на полученном изображении, называются шаблонами лучей. Поскольку шаблоны лучей являются, по существу, изображениями, сформированными в виде лучей P1 и P2 шаблонов, попадающих в действительную область, которые образованы в датчике изображения, то шаблоны лучей обозначены одними и теми же ссылочными позициями, что и лучи P1 и P2 шаблонов. Следовательно, изображения, соответствующие лучу P1 первого шаблона и лучу P2 второго шаблона, называются первым шаблоном P1 луча и вторым шаблоном P2 луча, соответственно.
Элемент 132c получения изображений может включать в себя элемент получения цифрового изображения, который преобразует изображение предмета в электрический сигнал и затем преобразует электрический сигнал в цифровой сигнал, подлежащий сохранению в запоминающем устройстве. Элемент получения цифрового изображения может включать в себя датчик изображения (не показан) и элемент обработки изображения (не показан).
Датчик изображения является устройством, которое преобразует оптическое изображение в электрический сигнал, и выполнен в виде кристалла, имеющего множество фотодиодов, встроенных в него. Примером фотодиода может быть элемент изображения. Электрические заряды накапливаются в каждом из элементов изображения в соответствии с изображением, образованном в кристалле с помощью луча, проходящего через линзу. Электрические заряды, накопленные в элементе изображения, преобразуются в электрический сигнал (например, напряжение). Устройство с зарядовой связью (CCD), комплементарный металлооксидный полупроводник (CMOS) и тому подобное хорошо известны как датчик изображения.
Элемент обработки изображения генерирует цифровое изображение на основании аналогового сигнала, выдаваемого датчиком изображения. Элемент обработки изображения может включать в себя аналого-цифровой преобразователь, который преобразует аналоговый сигнал в цифровой сигнал, буферное запоминающее устройство, которое временно записывает цифровые данные в соответствии с цифровым сигналом, выдаваемым аналого-цифровым преобразователем, и процессор цифровых сигналов (DSP), который генерирует цифровое изображение посредством обработки данных, записанных в буферном запоминающем устройстве.
Элемент 190a определения шаблона может определять элементы точек, линий, поверхностей и тому подобного относительно заданных элементов изображения, образующих полученное изображение, и определять шаблоны P1 и P2 лучей или точек линий, поверхностей и тому подобного, которые образуют шаблоны P1 и P2 лучей.
Например, элемент 190a определения шаблона может извлекать горизонтальную линию, образующую первый шаблон P1 луча, и горизонтальную линию, образующую второй шаблон P2 луча посредством извлечения отрезков линии, выполненных в виде элементов изображения, более ярких по сравнению с окружающей средой, которые являются непрерывными.
Однако настоящее раскрытие не ограничивается этим. Поскольку различные способы извлечения шаблона, имеющего заданную форму, из цифрового изображения уже хорошо известны в области техники, элемент 190a определения шаблона может извлекать первый шаблон P1 луча и второй шаблон P2 луча с использованием этих способов.
Элемент 132a излучения первого шаблона и элемент 132b излучения второго шаблона расположены вертикально на расстоянии h3 друг от друга. Элемент 132a излучения первого шаблона излучает вниз луч первого шаблона, и элемент 132b излучения второго шаблона излучает вверх луч второго шаблона, так чтобы лучи первого и второго шаблонов пересекались друг с другом.
Элемент 132c получения изображений расположен вниз от элемента 132b излучения второго шаблона на расстоянии h2 для фотографирования изображения спереди корпуса 110 пылесоса под углом θs обзора относительно направления сверху вниз. Элемент 132c получения изображений установлен в положении, расположенном на расстоянии h 1 от нижней поверхности. Элемент 132c получения изображений предпочтительно может быть установлен в положении, которое не мешает фотографированию изображения передней стороны, учитывая форму всасывающего узла 120.
Каждый из элемента 132a излучения первого шаблона и элемента 132b излучения второго шаблона установлен таким образом, что направление оптических осей линз, каждого из элемента 132a излучения первого шаблона и элемента 132b излучения второго рисунка, образует заданный угол излучения.
Элемент 132a излучения первого шаблона излучает вниз луч P1 первого шаблона под первым углом θr1 излучения, и элемент 132b излучения второго шаблона излучает вверх луч P2 второго шаблона под вторым углом θr2 излучения. В этом случае первый угол θr1 излучения и второй угол θr2 излучения отличаются друг от друга, но могут быть установлены равными друг другу в некоторых случаях. Первый угол θr1 излучения и второй угол θr2 излучения предпочтительно могут быть установлены в диапазоне 50-75°, но настоящее раскрытие не обязательно ограничивается этим. Например, первый угол θr1 излучения может быть установлен на 60-70°, и второй угол θr2 излучения может быть установлен на 50-55°. Первый угол θr1 излучения и второй угол θr2 излучения могут быть изменены в зависимости от формы всасывающего узла 120 и высоты верхнего участка, подлежащего определению.
Когда луч шаблона, излучаемый элементом 132a излучения первого шаблона и/или элементом 132b излучения второго шаблона, попадает на препятствие, положения шаблонов P1 и P2 лучей на полученном изображении могут изменяться в зависимости от положения, в котором препятствие удалено от элемента 132a излучения первого шаблона. Например, когда луч P1 первого шаблона и луч P2 второго шаблона попадают на заранее определенное препятствие, первый шаблон P1 луча отображается в более высоком положении на полученном изображении, так как препятствие расположено ближе к роботу-пылесосу 100. Напротив, второй шаблон P2 луча отображается в более низком положении на полученном изображении, так как препятствие расположено дальше от робота-пылесоса 100.
То есть данные о расстояниях до препятствия, которые соответствуют рядам (линиям, образованных элементами изображения, расположенным в боковом направлении), образующим изображение, генерируемое элементом 132c получения изображений, сохранены заранее. Если шаблоны P1 и P2 лучей, определенные на изображении, полученном с помощью элемента 132c получения изображений, определены в заданном ряду, положение препятствия может быть установлено на основании данных о расстоянии до препятствия, которые соответствуют ряду.
Угол θs обзора элемента 132c получения изображений может быть установлен на значение 100° или более и предпочтительно может быть установлен на 100-110°. Однако настоящее раскрытие не обязательно ограничивается этим.
Кроме того, расстояние от пола области очистки до элемента 132c получения изображений может быть установлено приблизительно на 60-70 мм. В этом случае пол области очистки на изображении, полученном элементом 132c получения изображений, показан после D1 от элемента 132c получения изображений, и D2 является положением, в котором первый шаблон P1 луча отображен на полу, показанном на полученном изображении.
Когда препятствие расположено в D2, изображение, на котором первый шаблон P1 луча попадает на препятствие, может быть получено элементом 132c получения изображений. Когда препятствие подходит ближе к роботу-пылесосу 100, чем D2, первое оптическое изображение отображается выше референсного положения ref1, соответствующего падающему лучу P1 первого шаблона.
В данном описании расстояние от корпуса 110 пылесоса до D1 может составлять предпочтительно 100-150 мм, и расстояние от корпуса 110 пылесоса до D2 может составлять предпочтительно 180-280 мм. Однако настоящее раскрытие не обязательно ограничивается этим. При этом, D3 представляет собой расстояние от наиболее выступающего участка передней стороны корпуса 110 пылесоса до положения, в котором падает луч второго рисунка. Поскольку корпус 110 пылесоса определяет препятствие во время перемещения, D3 является минимальным расстоянием, на котором корпус 110 пылесоса может определять препятствие спереди (верхнее положение) себя без столкновения с препятствием. D3 может быть установлено приблизительно на 23-30 мм.
При этом, когда первый шаблона P1 луча, показанный на полученном изображении, исчезает в обычном состоянии во время перемещения корпуса 110 пылесоса, или когда часть первого шаблона луча отображена на полученном изображении, элемент 190b получения информации о препятствии определяет, что имеется уступ вблизи робота-пылесоса 100.
Когда первый шаблона P1 луча не отображен на полученном изображении, элемент 190b получения информации о препятствии может распознавать, что спереди робота-пылесоса 100 имеется уступ. Когда выступ (например, ступени) имеется спереди робота-пылесоса 100, луч первого шаблона не попадает на пол, и, следовательно, первый шаблон P1 луча исчезает на полученном изображении.
Элемент 190b получения информации о препятствии может определять, что уступ существует спереди на расстоянии D2 от корпуса 110 пылесоса на основании длины D2. В этом случае, когда первый шаблон P1 луча имеет форму крест-накрест, горизонтальная линия исчезает, и отображается только вертикальная линия. Следовательно, элемент 190b получения информации о препятствии может определять, что существует выступ.
Кроме того, когда участок первого шаблона луча не отображается, элемент 190b получения информации о препятствии может определять, что уступ существует с левой или правой стороны робота-пылесоса 100. Когда не отображается участок справа первого шаблона луча, элемент 190b получения информации о препятствии может определять то, что уступ существует с правой стороны робота-пылесоса 100.
Таким образом, на основании выявленной информации об уступе элемент 190b получения информации о препятствии может управлять узлом 111 колес для перемещения по пути, на котором робот-пылесос 100 не падает с уступа.
Кроме того, когда имеется уступ спереди робота-пылесоса 100, контроллер 190c перемещения может снова проверять, что существует ли уступ, используя датчик уступа, установленный на нижнем участке корпуса 110 пылесоса, посредством перемещения вперед на конкретное расстояние, например, D2 или менее. Таким образом, робот-пылесос 100 может первично проверять существует ли уступ с помощью полученного изображения, и вторично проверять существует ли уступ с помощью датчика уступа.
Фиг.11 - вид луча, имеющего первый шаблон, излучаемый элементом 132a излучения первого шаблона.
Элемент 190a определения шаблона определяет первый шаблон луча или второй шаблон луча из полученного изображения, выдаваемого элементом 132c получения изображений, и использует первый или второй шаблоны луча в элементе 190b получения информации о препятствии.
Элемент 190b получения информации о препятствии анализирует первый или второй шаблоны луча, определенный из полученного изображения, и сравнивает положение первого шаблона луча с референсным положением ref1, таким образом, определяя, существует ли препятствие.
Как показано на фиг.11a, когда горизонтальная линия первого шаблона P1 луча расположена в референсном положении ref1, элемент 190b получения информации о препятствии определяет, что текущим состоянием является обычное состояние. В данном описании обычным состоянием является состояние, в котором пол является ровным и гладким, и состояние, в котором робот-пылесос 100 может непрерывно перемещаться, так как не существует препятствий спереди робота-пылесоса.
Второй шаблон P2 луча падает на препятствие, только когда существует препятствие на верхнем участке передней стороны, которое будет отображаться на полученном изображении. Следовательно, второй шаблон P2 луча обычно не отображается на полученном изображении в обычном состоянии.
Как показано на фиг.11b, когда горизонтальная линия первого шаблона P1 луча расположена над референсным положением ref1, элемент 190b получения информации о препятствии определяет, что спереди имеется препятствие.
Если препятствие определено с помощью элемента 190b получения информации о препятствии, как описано выше, контроллер 190c перемещения управляет узлом 111 колес для перемещения при обходе препятствия. При этом элемент 190b получения информации о препятствии может определять положение и размер определенного препятствия в соответствии с положениями первого и второго шаблонов P1 и P2 луча, и был ли отображен второй шаблон P2 луча. Кроме того, элемент 190b получения информации о препятствии может определять положение и размер препятствия в соответствии с изменениями первого и второго шаблонов P1 и P2 лучей, отображенных на полученном изображении во время перемещения.
Контроллер 190c перемещения управляет узлом 111 колес путем определения, должен ли узел 111 колес непрерывно перемещаться относительно препятствия или перемещаться при обходе препятствия на основании информации о препятствии, которая введена с элемента 190b получения информации о препятствии. Например, когда высота препятствия ниже конкретной высоты или меньше, или когда корпус 110 пылесоса должен проходить в область между препятствием и полом, контроллер 190c перемещения определяет, что перемещение узла 111 колес возможно.
Как показано на фиг.11c, первый шаблон P1 луча может отображаться в положении ниже референсного положения ref1. Когда первый шаблон P1 луча может быть отображен в положении ниже референсного положения ref1, элемент 190b получения информации о препятствии определяет, что имеется наклонный участок. В случае уступа первый рисунок P1 луча исчезает и, следовательно, наклонный участок отличается от уступа.
Как показано на фиг.11d, элемент 190b получения информации о препятствии определяет, что существует уступ в направлении перемещения, когда первый шаблонов P1 луча не отображен.
Как показано на фиг.11e, когда участок первого шаблона P1 луча не отображается, элемент 190b получения информации о препятствии может определять, что существует уступ на левой или правой стороне корпуса 110 пылесоса. В этом случае элемент 190b получения информации о препятствии определяет, что существует уступ на левой стороне корпуса 110 пылесоса.
При этом, когда первый шаблон P1 луча имеет форму крест-накрест, препятствие может быть определено с учетом, как положения горизонтальной линии, так и высоты вертикальной линии.
Фиг.12 - концептуальный вид форм первого и второго шаблонов P1 и P2 луча, излучаемых на каждое препятствие для каждой формы препятствия.
Как показано на фиг.12, так как лучи, излучаемые элементами 132a и 132b излучения первого и второго шаблонов, падают на препятствие, так что шаблоны лучей показаны на полученном изображении, элемент 190b получения информации о препятствии может определять положение, размер и форму препятствия.
Как показано на фиг.12a, когда поверхность стены имеется спереди во время перемещения корпуса 110 пылесоса, луч первого шаблона падает на пол, и луч второго шаблона падает на поверхность стены. Соответственно, первый шаблон P1 луча и второй шаблон P2 луча отображаются как две горизонтальные линии на полученном изображении. В этом случае, когда расстояние от корпуса 110 пылесоса до поверхности стены больше D2, первый шаблон P1 луча отображается в референсном положении ref1, но второй шаблон P2 луча также отображается вместе с первым шаблоном P1 луча. Следовательно, элемент 190b получения информации о препятствии может определять, что существует препятствие.
При этом, когда расстояние от корпуса 110 пылесоса до поверхности стены меньше D2, луч первого шаблона падает на поверхность стены, а не на пол. Следовательно, первый шаблон P1 луча отображается на верхней стороне референсного положения ref1, и второй шаблон P2 луча отображается на верхней стороне первого шаблона P1 луча. Поскольку положение второго шаблона P2 луча отображается на нижней стороне, когда второй шаблон P2 луча приближается к препятствию, второй шаблон луча P2 отображается на нижней стороне по сравнению с тем, когда расстояние от корпуса 110 пылесоса до поверхности стены больше D2. Здесь второй шаблон луча P2 отображается на верхней стороне по сравнению с референсным положением ref1 и первым шаблоном P1 луча.
Соответственно, элемент 190b получения информации о препятствии может рассчитать расстояние от корпуса 110 пылесоса до поверхности стены как препятствие с помощью первого шаблона P1 луча и второго шаблона P2 луча.
Как показано на фиг.12b, когда существует препятствие, такое как кровать или комод, первый шаблон P1 луча и второй шаблон P2 луча падают в виде двух горизонтальных линий на пол и препятствие, соответственно.
Элемент 190b получения информации о препятствии определяет, существует ли препятствие на основании первого шаблона P1 луча и второго шаблона P2 луча. Высота препятствия может быть определена на основании положения второго шаблона P2 луча и изменения второго шаблона P2 луча, которое происходит, в то время как корпус 110 пылесоса приближается к препятствию. Соответственно, контроллер 190c перемещения управляет узлом 111 колес путем определения должен ли корпус 110 пылесоса проходить в нижнюю область препятствия.
Например, когда имеется препятствие, имеющее заданную область, отступающую от пола, такую как кровать в области очистки, контроллер 190c перемещения может распознавать область и предпочтительно определять может ли пылесос пройти через препятствие или придется обходить препятствие путем определения высоты области.
Когда определено, что высота области меньше высоты корпуса 110 пылесоса, контроллер 190c перемещения может управлять узлом 111 колес таким образом, что корпус 110 пылесоса перемещается с обходом препятствия. Напротив, когда определено, что высота области больше высоты корпуса 110 пылесоса, контроллер 190c перемещения может управлять узлом 111 колес таким образом, что корпус 110 пылесоса проходит в область и проходит через область.
Хотя первый шаблон P1 луча и второй шаблон P2 луча отображаются в виде двух горизонтальных линий даже на фиг.12a, расстояние между первым шаблоном P1 луча и вторым шаблоном P2 луча на фиг.12b отличается от расстояния между первым шаблоном P1 луча и вторым шаблоном P2 луча на фиг.12a. Следовательно, элемент 190b получения информации о препятствии может различать разницу. На фиг.12a положение первого шаблона P1 луча отображается выше референсного положения ref1, когда первый шаблон луча приближается к препятствию. Однако как показано на фиг.12b, когда препятствие расположено над корпусом 110 пылесоса, первый шаблон P1 луча отображается в референсном положении ref1, и положение второго шаблон P2 луча изменено, даже когда они приближаются к препятствию на конкретное расстояние. Следовательно, элемент 190b получения информации о препятствии может различать тип препятствия.
Как показано на фиг.12c, в случае угла препятствия, такого как кровать или комод, когда первый шаблон P1 луча излучается в виде горизонтальной линии на пол, а второй шаблон P2 луча излучается на угол препятствия. Так как второй шаблон P2 луча излучается на угол препятствия, участок второго шаблона P2 луча отображается в виде горизонтальной линии, и другой участок второго шаблона P2 луча отображается в виде наклонной. Поскольку положение второго шаблона P2 луча становится выше, так как второй шаблон P2 луча является более удаленным от корпуса 110 пылесоса, второй шаблон P2 луча, излучаемый на боковую поверхность препятствия, отображается в виде наклонной линии, согнутой вверх относительно горизонтального направления, излучаемой на переднюю поверхность препятствия.
Как показано на фиг.12d, когда корпус 110 пылесоса приближается к углу поверхности стены на конкретное расстояние или больше, участок первого шаблона P1 луча отображается в виде горизонтальной линии на верхней стороне референсного положения ref1. Так как участок второго шаблона P2 луча излучается на боковую поверхность угла, участок второго шаблона P2 луча отображается в виде наклонной под косым углом линии, согнутой вниз. Что касается нижней поверхности, участок второго шаблон P2 луча отображается в виде горизонтальной линии в референсном положении ref1.
При этом участок второго шаблона P2 луча отображается в виде горизонтальной линии, как показано на фиг.12c, и участок второго шаблона P2 луча, который излучается на боковую поверхность угла, отображается в виде наклонной под косым углом линии, согнутой вверх.
Как показано на фиг.12e, в случае препятствия, выступающего от поверхности стены, первый шаблон P1 луча отображается в виде горизонтальной линии такой, как и референсное положение ref1. Участок второго шаблона P2 луча отображается в виде горизонтальной линии на выступающую поверхность, другой участок второго шаблона P2 луча отображается в виде наклонной под косым углом, согнутой вверх линии, на боковой поверхности выступающей поверхности, и другой участок второго шаблона P2 луча отображается в виде горизонтальной линии на поверхности стены.
Соответственно, элемент 190b получения информации о препятствии может определять положение, форму и размер (высоту) препятствия на основании положений и форм лучей первого и второго шаблонов.
Ниже будет описана подробная конфигурация узла датчика 130.
Как показано на фиг.5, узел датчика 130 дополнительно включает в себя часть с окошком 133 и кожух 134 в дополнение к первому измерительному элементу 131 и второму измерительному элементу 132.
Часть с окошком 133 расположена для перекрытия первого и второго измерительных элементов 131 и 132 и имеет прозрачность. Здесь прозрачность является свойством, когда передается, по меньшей мере, часть падающего луча, и имеет понятие, включающее в себя полупрозрачность.
Часть с окошком 133 может быть выполнена из синтетической смолы или стекла. Когда часть с окошком 133 имеет полупрозрачность, материал может быть образован с полупрозрачностью. В качестве альтернативы материал может иметь прозрачность, и пленка, закрепленная на материале, может иметь полупрозрачность.
Кожух 134 установлен на корпусе 110 пылесоса и выполнен с возможностью закрепления первого и второго измерительных элементов 131 и 132 и части с окошком 133. Как показано на этом чертеже, кожух 134 выполнен с возможностью размещения, по меньшей мере, одного участка части с окошком 133. Кожух 134 может быть выполнен из синтетической смолы или металла и является светонепроницаемым.
Как показано на этом чертеже, кожух 134 может включать в себя установочную раму 134a и раму 134b крышки.
Установочная рама 134a образует область, в которой установлены и поддерживаются первый и второй измерительные элементы 131 и 132. Для этой цели установочная рама 134a может содержать первый установочный элемент 134a1 для установки первого измерительного элемента 131 в него, и второй установочный элемент 134a2 для установки второго измерительного элемента 132 в него. Панель 132', на которой установлены элементы 132a и 132b излучения первого и второго шаблонов и элемент 132c получения изображений, может быть установлена на втором установочном элементе 134a2. Второй установочный элемент 134a2 может быть расположен с наклоном относительно первого установочного элемента 134a1.
Установочная рама 134a содержит первый и второй крепежные крючки 134a' и 134aʺ для обеспечения закрепления установочной рамы 134a на раме 134b крышки и части с окошком 133. Первый крепежный крючок 134a' закрепляется в крепежном отверстии 134b' рамы 134b крышки, и второй крепежный крючок 134aʺ закрепляется в крепежном отверстии 133bʺ части с окошком 133. Установочная рама 134a может быть установлена на корпусе 110 пылесоса.
Рама 134b крышки установлена на корпусе 110 пылесоса в положении, в котором рама 134b крышки соединена с установочной рамой 134a и размещает, по меньшей мере, один участок части с окошком 133. Рама 134b крышки может быть образована в форме 'L' для закрытия верхней и боковой поверхностей корпуса 110 пылесоса на угле корпуса 110 пылесоса.
Верхний конец 134b1 рамы 134b крышки расположен на верхней стороне первого измерительного элемента 131 и может быть образован с наклоном, чтобы иметь заостренную форму. В соответствии с вышеописанной формой, хотя робот-пылесос 100 заходит под мебель или в зазор во время своего перемещения, робот-пылесос 100 может легко выходить из-под мебели или из зазора, и первый и второй измерительные элементы 131 и 132 могут быть защищены верхним концом 134b1, расположенным вверх от первого и второго измерительных элементов 131 и 132. На этом чертеже случай, в котором верхний конец 134b1 образован на конце отверстия 134bʺ, который будет описан ниже, изображен в качестве примера.
Первый измерительный элемент 131 и, по меньшей мере, один участок второго измерительного элемента 132 могут быть размещены в отверстии 134bʺ, образованном внутри рамы 134b крышки. На этом чертеже показано, что первый измерительный элемент 131 и элементы 132a и 132b излучения первого и второго шаблонов второго измерительного элемента 132 размещены в отверстии 134bʺ.
Часть с окошком 133 может включать в себя первое окно 133a и второе окно 133b.
Первое окно 133a образовано из прозрачного материала и расположено для закрытия первого измерительного элемента 131. Второе окно 133b является полупрозрачным и расположено для закрытия второго измерительного элемента 132. Как показано на этом чертеже, сквозное отверстие 133b' может быть образовано на участке второго окна 133b, которое соответствует первому измерительному элементу 131, и первое окно 133a может быть расположено для закрытия сквозного отверстия 133b'.
Так как первый измерительный элемент 131 образован из прозрачного материала, изображения на передней и верхней частях корпуса 110 пылесоса могут отчетливо фотографироваться. Кроме того, так как второе окно 133b является полупрозрачным, элемент 132a излучения первого шаблона, элемент 132b излучения второго шаблона и элемент 132c получения изображений на задней поверхности второго окна 133b плохо видны, если смотреть невооруженным глазом с наружной стороны, так что может быть обеспечен аккуратный внешний вид.
Второе окно 133b может быть разделено на первую часть 133b1, вторую часть 133b2, выступающую часть 133b4 и третью часть 133b3.
Первая часть 133b1 является частью, имеющей сквозное отверстие 133b', и расположена с наклоном относительно верхней поверхности корпуса 110 пылесоса. Первое окно 133a, установленное в сквозном отверстии 133b', расположено для закрытия первого измерительного элемента 131.
Вторая часть 133b2 проходит вниз в наклонной форме от первой части 133b1 и расположена для закрытия элементов 132a и 132b излучения первого и второго шаблонов. В этом примере осуществления показано, что вторая часть 133b2 проходит вниз параллельно боковой поверхности корпуса 110 пылесоса.
Выступающая часть 133b4 проходит вниз от второй части 133b2 и закрыта рамой 134b крышки. Как показано на этом чертеже, выступающая часть 133b4 может проходить вниз к внутренней стороне второй части 133b2. Другими словами, выступающая часть 133b4 может быть расположена вверх с наклоном относительно третьей части 133b3, чтобы не создавать помех углу обзора в направлении сверху вниз элемента 132c получения изображений. Подобным образом, участок рамы 134b крышки, который закрывает выступающую часть 133b4, расположен с наклоном, чтобы не создавать помех углу обзора в направлении сверху вниз элемента 132c получения изображений.
Третья часть 133b3 проходит вниз от выступающей части 133b4 для выступа на наружную сторону рамы 134b крышки и расположена для закрытия элемента 132c получения изображений. Третья часть 133b3 может проходить вниз параллельно второй части 133b2 по боковой поверхности корпуса 110 пылесоса.
Ниже будет более подробно описан всасывающий узел 120.
Фиг.13 - вид всасывающего узла 120, изображенного на фиг.1, фиг.14 - вид сбоку всасывающего узла 120, изображенного на фиг.13, фиг.15 - вид спереди всасывающего узла 120, изображенного на фиг.13, и фиг.16 - вид нижнего участка всасывающего узла 120, изображенного на фиг.13.
В этом примере осуществления, когда всасывающий узел 120 имеет форму, выступающую от корпуса 110 пылесоса, существует высокая вероятность того, что всасывающий узел 120 будет сталкиваться с препятствием, пока не буде установлен отдельный узел датчика на всасывающем узле 120. Узел датчика 130, установленный на корпусе 110 пылесоса, определяет препятствие спереди всасывающего узла 120. Однако когда препятствие существует в слепой зоне, в которой узел датчика преобразователь 130 не работает, физическое столкновение может произойти между роботом-пылесосом 100 и препятствием. Когда происходит физическое столкновение, робот-пылесос 100 должен перемещаться назад или изменять направление для ухода от препятствия. Для этой цели, прежде всего, необходимо определять физическое столкновение между роботом-пылесосом 100 и препятствием.
Всасывающий узел 120 включает в себя кожух 121 и переключатель 122 бампера, который определяет физическое столкновение.
Кожух 121 образует внешний вид всасывающего узла 120 и включает в себя всасывающее отверстие 120b', которое всасывает воздух, содержащий пыль, и элемент 120bʺ для сообщения, сообщающийся с всасывающим каналом потока в корпусе 110 пылесоса. По меньшей мере, один участок кожуха 121 может быть образован прозрачным, так что видна внутренняя часть всасывающего узла 120.
Переключатель 122 бампера расположен на, по меньшей мере, одной поверхности кожуха 121. Когда переключатель 122 бампера находится в контакте с препятствием, переключатель 122 бампера сжимается и передает сигнал контакта на контроллер.
Переключатель 122 бампера может быть с возможностью окружения кожуха 121. На этих чертежах показано, что передний переключатель 122a бампера расположен на передней стороне кожуха 121, и боковые переключатели 122b и 122c бампера расположены на обеих левой и правой сторонах кожуха 121 соответственно.
В соответствии с вышеописанной конфигурацией можно определять не только физическое столкновение с препятствием, расположенным спереди всасывающего узла 120, но также физическое столкновение с препятствием, расположенным на боковой поверхности всасывающего узла 120. Таким образом, диапазон определения физического столкновения с препятствием может быть увеличен.
Как показано на фиг.2, можно видеть, что боковые переключатели 122b и 122c бампера расположены для выступа дальше виртуальных выносных линий, соответственно, в контакте с обеими сторонами корпуса 110 пылесоса. То есть боковые переключатели 122b и 122c бампера могут быть расположены для выступа дальше обеих боковых сторон корпуса 110 пылесоса в боковых направлениях соответственно.
В этом случае, когда препятствие расположено около боковой поверхности робота-пылесоса 100, боковой переключатель бампера 122b или 122c сталкивается с препятствием раньше корпуса 110 пылесоса, так что препятствие может эффективно определяться.
Переключатель 122 бампера включает в себя бампер 122' и переключатель 122ʺ.
Бампер 122' является элементом, установленным на кожухе 121, который открыт на наружную сторону, и находится под давлением, когда он находится в контакте с препятствием, для перемещения внутрь.
Упругий элемент (не показан), который оказывает давление на бампер 122' наружу, может быть расположен на внутренней стороне бампера 122', так что бампер 122' возвращается в исходное состояние при отходе бампера 122' от препятствия. Упругий элемент может опираться на каждый из бампера 122' и кожуха 121.
Переключатель 122ʺ расположен на внутренней стороне бампера 122' для выработки электрического сигнала вследствие нахождения под давлением, когда бампер 122' перемещен внутрь. Микропереключатели, известные в области техники, могут использоваться в качестве переключателя 122ʺ.
Если сигнал контакта с препятствием передается через переключатель 122 бампера, контроллер определяет, что всасывающий узел 120 столкнулся с препятствием и управляет приведением в движение узла 111 колес. Например, контроллер может прикладывать движущую силу в противоположном направлении к основным колесам 111a, так что робот-пылесос 100 перемещается назад. В качестве альтернативы, контроллер может прикладывать движущую силу только к одному из основных колес 111a или прикладывать движущую силу в разных направлениях к обоим основным колесам 111a, так что робот-пылесос 100 поворачивается.
Выше было описано, что переключатель 122 бампера выполнен с возможностью разделения на передний переключатель 122a бампера и боковые переключатели 122b и 122c бампера, но настоящее раскрытие не ограничивается этим. Переключатель 122 бампера может быть образован в форме 'С' для закрытия передней, а также левой и правой поверхностей кожуха 121.
В этом случае переключать 122 бампера выполнен с возможностью перемещения к задней стороне (когда участок, расположенный на передней поверхности кожуха 121 находится в контакте с препятствием), правой стороне (когда участок, расположенный на левой поверхности кожуха 121 находится в контакте с препятствием), и левой стороне (когда участок, расположенный на правой поверхности кожуха 121 находится в контакте с препятствием).
Как описано выше, если переключатель 122 бампера, который работает механически, расположен на всасывающем узле 120, столкновение с препятствием может определяться более эффективно по сравнению с тем, когда установлен электронный датчик (например, датчик ускорения, датчик положения и т.д.). Кроме того, себестоимость может быть уменьшена, и конфигурация схемы может быть упрощена.
Кроме того, более улучшенная функция определения препятствия и изменения направления может быть осуществлена путем сочетания переключателя 122 бампера и узла датчика 130, расположенного на корпусе 110 пылесоса, который описан выше.
При этом когда робот-пылесос расположен рядом со ступенью, уступом и тому подобным, который быстро меняет рельеф, необходимо соответствующее действие обхода. Если определение такой ситуации и управление в соответствии с определением не осуществляются, робот-пылесос 100 может сломаться при падении со ступени или никогда не сможет подняться снова на ступень.
Для этой цели датчик 124 уступа, который определяет рельеф поверхности под собой, расположен на переднем конце нижней стороны всасывающего узла 120. Датчик 124 уступа содержит светоизлучающий элемент и светоприемный элемент и измеряет расстояние между датчиком 124 уступа и полом G посредством измерения времени, в течение которого луч, излучаемый на пол G светоизлучающим элементом, принимается светоприемным элементом. Следовательно, когда спереди существует ступень с резко опускаемым вниз рельефом, время приема быстро увеличивается. Когда существует уступ спереди, любой луч не принимается светоприемным элементом.
На этих чертежах показано, что наклонный участок 120a, наклоненный вверх относительно пола G, образован на переднем конце нижней стороны всасывающего узла 120, и датчик 124 уступа установлен на наклонном участке 120a для обращения к полу G. В соответствии с вышеописанной конструкцией датчик 124 уступа расположен под наклоном к полу G на передней нижней стороне всасывающего узла 120. Следовательно, рельеф поверхности под передней нижней стороной всасывающего узла 120 может быть определен датчиком 124 уступа.
В отличие от вышеописанного расположения датчик 124 уступа может быть расположен вертикально к полу G для определения рельефа поверхности непосредственно под датчиком 124 уступа.
Если определено с помощью датчика 124 уступа, что рельеф поверхности под датчиком 124 уступа понижен до конкретного уровня или ниже, контроллер управляет приведением в движение узла 111 колес. Например, контроллер может прикладывать движущую силу в противоположном направлении к основным колесам 111a, так что робот-пылесос 100 перемещается назад в обратном направлении R. В качестве альтернативы. Контроллер может прикладывать движущую силу только к одному из основных колес 111a или прикладывать движущую силу в разных направлениях к обоим основным колесам 111a, так что робот-пылесос 100 поворачивается.
Датчик 124 уступа также может быть расположен на нижней поверхности корпуса 110 пылесоса. Учитывая функцию датчика 124 уступа, датчик 124 уступа расположенный на корпусе 110 пылесоса, предпочтительно может быть расположен рядом с задней стороной корпуса 110 пылесоса.
Для сведения, так как наклонный участок 120a образован на переднем конце нижней стороны всасывающего узла 120, робот-пылесос 100 может легко подниматься на низкий порог или препятствие. Кроме того, как показано на этих чертежах, когда вспомогательное колесо 123 расположено на наклонном участке 120a, подъем может осуществляться более легко. Для сведения вспомогательное колесо 123 исключено из фиг.14 для описания датчика 124 уступа.
При этом, поскольку робот-пылесос 100 приводится в движение беспроводным способом, необходимо заряжать батарею 180, расположенную в корпусе 110 пылесоса, во время использования робота-пылесоса 100. Для зарядки батареи 180 предусмотрена зарядная станция (не показана) в качестве источника питания, и терминал 125 для зарядки, выполненный с возможностью соединения с зарядной станцией, которая расположена на всасывающем узле 120.
На этих чертежах показано, что терминал 125 для подзарядки расположен на наклонном участке 120a, который выходит на переднюю сторону. Терминал 125 для подзарядки может быть расположен между датчиками 124 уступа, соответственно, расположенными на обеих сторонах всасывающего узла 120.
При этом щеточный валик 126 может быть расположен во всасывающем узле 120 для обеспечения эффективного всасывания пыли. Щеточный валик 126 вращается во всасывающем отверстии 120b' для сметания пыли и обеспечения подачи пыли во всасывающий узел 120.
Учитывая функцию щеточного валика 126, пыль прилипает к щеточному валику 126 со временем использования. Хотя существует необходимость в очистке щеточного валика 126, всасывающий узел 120 обычно выполнен в конструкции, в которой трудно разобрать всасывающий узел 120.
В настоящем описании раскрыта конструкция, в которой только щеточный валик 126 можно отделять и очищать без полной разборки всасывающего узла 120.
Фиг.17 - вид конструкции, в которой щеточный валик 126 выступает за счет переключения элемента переключения на всасывающем узле, изображенном на фиг.13.
Как показано на фиг.17, кожух 121 включает в себя основную часть 121a кожуха и закрывающую часть 121b кожуха.
Основная часть 121a кожуха содержит щеточный валик 126, выполненный с возможностью вращения в ней, и отверстие 121a' образовано на одной стороне основной части 121a кожуха. Передний переключатель 122a бампера установлен на передней стороне основной части 121a кожуха, и любой из боковых переключателей 122b и 122c бампера установлен на другой стороне основной части 121a кожуха.
Закрывающая часть 121b кожуха соединена с возможностью съема с основной частью 121a кожуха для открытия/закрытия отверстия 121a', образованного на одной стороне основной части 121a кожуха. Другой из боковых переключателей 122b и 122c бампера установлен на закрывающей части 121b кожуха.
В соответствии с вышеописанной конструкцией, если закрывающая часть 121b кожуха отделена от основной части 121a кожуха, отверстие 121a', образованное на одной стороне основной части 121a кожуха, открыто на наружную сторону. Следовательно, щеточный валик 126, расположенный в основной части 121a кожуха, может быть открыт на наружную сторону через отверстие 121a'.
Элемент 127 переключения, с помощью которого снимается блокировка закрывающей части 121b кожуха с основной частью 121a кожуха при его переключении, может быть расположен на всасывающем узле 120. Элемент 127 переключения может быть осуществлен в различных видах, таких как движковый тип и нажимной тип. На этом чертеже показано, что элемент 127 переключения движкового типа установлен на основной части 121a кожуха.
Упругий элемент 128, который упруго нажимает на щеточный валик 126, может быть установлен внутри другой стороны основной части 121a кожуха. Пластинчатая пружина, цилиндрическая пружина и тому подобное могут быть использованы в качестве упругого элемента 128.
В положении, в котором упругий элемент 128 прижат щеточным валиком 126, при закреплении закрывающей части 121b кожуха на основной части 121a кожуха, если закрепление отсоединено путем переключения элемента 127 переключения, упругий элемент 128 нажимает на щеточный валик 126. В этом случае, как показано на этом чертеже, закрывающая часть 121b кожуха может находиться в положении, в котором она соединена со щеточным валиком 126.
Фиг.18 - концептуальный вид потока воздуха внутри робота-пылесоса 100, изображенного на фиг.1.
Как показано на фиг.18, воздух, подаваемый во всасывающий узел 120 через всасывающее отверстие 120b' всасывающего узла 120, подается в корпус 110 пылесоса через элемент 120bʺ для сообщения. Для сведения, пыль (включая инородные вещества) содержится в воздухе, всасываемом через всасывающий узел 120.
Воздух, подаваемый в корпус 120 пылесоса, подается в пылесборник 140. Всасывающий канал потока соответствует каналу потока, проходящему от входного отверстия 110', сообщающегося с элементом 120bʺ для сообщения, к первому отверстию 110a (см. фиг.19). Всасывающий канал потока может быть выполнен в виде трубки, периферийного элемента или сочетания трубки и периферийного элемента.
На этом чертеже показано, что всасывающая трубка 117 соединяет входное отверстие 110' с первым отверстием 110a, таким образом, образуя всасывающий канал потока.
Элемент 120bʺ для сообщения всасывающего узла 120 может быть расположен под нижней поверхностью передней стороны корпуса 110 пылесоса. В этом случае входное отверстие 110' образовано на нижней поверхности передней стороны корпуса 110 пылесоса. Кроме того, так как пылесборник 140 расположен сзади корпуса 110 пылесоса, электродвигатель 170 вентилятора и батарея 180 расположены на обеих левой и правой сторонах передней стороны пылесборника 140, соответственно.
В соответствии с вышеописанным расположением передний конец всасывающей трубки 117, сообщающийся с входным отверстием 110', образован для прохождения вверх. Кроме того, всасывающая трубка 117 проходит к одной стороне корпуса 110 пылесоса при обходе батареи 180. В этом случае всасывающая трубка 117 может быть расположена для прохождения над электродвигателем 170 вентилятора, расположенным на одной стороне корпуса 110 пылесоса.
Первое отверстие 110a образовано на верхней внутренней периферийной поверхности части 113 для размещения пылесборника для сообщения с входом 140a, образованным на верхней наружной периферийной поверхности пылесборника 140. Следовательно, всасывающая трубка 117 образована для прохождения вверх к первому отверстию 110a от входного участка 110'.
Воздух, подаваемый в пылесборник 140, проходит через, по меньшей мере, один циклон в пылесборнике 140. Пыль, содержащаяся в воздухе, отделяется, по меньшей мере, одним циклоном для сбора в пылесборнике 140, и воздух с удаленной из него пылью выпускается из пылесборника 140.
В частности, воздух образует вращающийся поток в пылесборнике 140, и пыль и воздух отделяются друг от друга за счет различия центробежной силы между воздухом и пылью. Воздух проходит к выходу 140 через, по меньшей мере, один циклон под действием всасывающей силы, генерируемой электродвигателем 170 вентилятора. Однако поскольку сила инерции, обусловленная весом пыли, больше всасывающей силы, генерируемой электродвигателем 170 вентилятора, пыль собирается на нижнем участке пылесборника 140 при постепенном падении.
Как показано на этом чертеже, входное отверстие 110' может быть образовано в центре нижней поверхности передней стороны корпуса 110 пылесоса. Вход 140a пылесборника 140 может быть образован открытым в направлении по касательной на внутренней периферийной поверхности пылесборника 140, так что воздух подается в боковом направлении для образования естественным путем вращающегося потока. В положении, в котором пылесборник 140 размещен на части 113 для размещения пылесборника, вход 140a может быть расположен в боковом направлении корпуса 110 пылесоса.
Воздух с отделенной от него пылью выпускается из пылесборника 140 и затем, в конечном счете, выпускается на наружную сторону через выпускное отверстие 112 в корпусе 110 пылесоса.
Выпускной канал потока соответствует каналу потока от второго отверстия 110b (см. фиг.19) до выпускного отверстия 112. Выпускной канал потока может быть образован в виде трубки, периферийного элемента или сочетания трубки и периферийного элемента.
На этом чертеже показано, что выходной канал потока выполнен в виде сочетания выпускной трубки 118, которая соединяет второе отверстие 110b с электродвигателем 170 вентилятора, и внутреннего устройства, которое направляет поток воздуха от электродвигателя 170 вентилятора к выпускному отверстию 112.
Электродвигатель 170 вентилятора может быть расположен рядом с центральной частью корпуса 110 пылесоса для уменьшения шума, выходящего на наружную сторону. В соответствии с этим второе отверстие 110b может быть также образовано рядом с центральной частью корпуса 110 пылесоса.
Как показано на этом чертеже, передний конец выпускной трубки 118, сообщающейся со вторым отверстие 110b, и задний конец всасывающего канала 117, сообщающегося с первым отверстием 110a, могут быть расположены рядом на одной и той же высоте.
Ниже будут подробно описаны часть 113 для размещения пылесборника, пылесборник 140 и крышка 150 пылесборника.
Фиг.19 - вид, иллюстрирующий положение перед установкой пылесборника 140 на части 113 для размещения пылесборника в роботе-пылесосе 100, изображенном на фиг.1.
Как показано на фиг.19, часть 113 для размещения пылесборника, размещающая пылесборник 140, образована в корпусе 110 пылесоса. Часть 113 для размещения пылесборника имеет форму, утопленную к передней стороне от задней стороны корпуса 110 пылесоса, и открыта назад и вверх. Часть 113 для размещения пылесборника может быть образована нижней поверхностью, поддерживающей пылесборник 140, и внутренней стенкой, окружающей часть наружной периферии пылесборника 140.
Утопленный участок 116, вдавленный вниз от верхней поверхности корпуса 110 пылесоса, образован по наружной периферии части 113 для размещения пылесборника. Крышка 150 пылесборника закреплена на части 113 для размещения пылесборника с возможностью поворота. При этом крышка 150 пылесборника расположена для одновременного закрытия верхней поверхности пылесборника 140 и утопленного участка 116 (см. фиг.2). Участок крышки 150 пылесборника размещен на утопленном участке 116 в положении, в котором крышка 150 пылесборника соединена с пылесборником 140.
Первое отверстие 110a и второе отверстие 110b образованы на внутренней стенке части 113 для размещения пылесборника. Первое отверстие 110a и второе отверстие 110b могут быть расположены на одной и той же высоте. На этом чертеже показано, что первое отверстие 110a и второе отверстие 110b образованы сбоку рядом друг с другом на верхнем конце внутренней стенки части 113 для размещения пылесборника.
Для образования потока воздуха, проходящего из всасывающего канала потока в выпускной канал потока через пылесборник 140, первое отверстие 110a и второе отверстие 110b должны быть расположены с возможностью соответствующего сообщения с входом 140a и выходом 140b. Кроме того, для обеспечения сообщения пылесборник 140 должен быть установлен в нормальном положении части 113 для размещения пылесборника.
Для этой цели установочный выступ 113b образован для выступа от нижней поверхности части 113 для размещения пылесборника, и установочная канавка 149 (см. фиг.22), соответствующая установочному выступу 113b, образована на нижней поверхности пылесборника 140. Пылесборник 140 может быть установлен в нормальном положении части 113 для размещения пылесборника при размещении установочного выступа 113b в установочной канавке 149.
Установочный выступ 113b предпочтительно может быть образован в положении за пылесборником 140, так что пылесборник 140 в форме цилиндра, не поворачивается в положении, в котором он размещен на части 113 для размещения пылесборника. На этом чертеже показано, что установочный выступ 113b образован на обеих левой и правой сторонах относительно центра пылесборника 140.
Для сведения, положения установочного выступа 113b и установочной канавки 149 могут быть изменены местами друг с другом. То есть установочный выступ может быть образован для выступа от нижней поверхности пылесборника 140, и установочная канавка может быть образована на нижней поверхности части 113 для размещения пылесборника.
Выступ 113a может быть образован для выступа от нижней поверхности части 113 для размещения пылесборника, и канавка 148 (см. фиг.22), соответствующая выступу 113a, может быть образована на нижней поверхности пылесборника 140. Канавка 148 может быть образована в центре пылесборника 140.
Часть 113 для размещения пылесборника или пылесборник 140 могут содержать прокладки 110a' и 110b', которые поддерживают воздухонепроницаемость между первым отверстием 110a и входом 140a и воздухонепроницаемость между вторым отверстием 110b и выходом 140b при установке пылесборника 140 в нормальном положении части 113 для размещения пылесборника. Прокладки 110a' и 110b' могут быть образованы для окружения первого отверстия 110a и второго отверстия 110b или могут быть образованы для окружения входа 140a и выхода 140b.
Фиг.20 - вид пылесборника 140, изображенного на фиг.1, и фиг.21 - вид в изометрии с пространственным разделением элементов основных частей пылесборника 140, изображенного на фиг.20.
Как показано на фиг.20 и 21, пылесборник 140 размещен на части 113 для размещения пылесборника, образованной на другой стороне корпуса 110 пылесоса и выполнен с возможностью сбора пыли, отфильтрованной из всасываемого воздуха. Как показано на этих чертежах, пылесборник 140 может быть образован в цилиндрической форме и включать в себя наружный кожух 141a, создающий внешний вид, верхний кожух 141b, верхнюю крышку 141d и нижний кожух 141c.
Наружный кожух 141a образован в цилиндрической форме с обоими открытыми концами для создания бокового внешнего вида пылесборника 140. Пылесборник 140 содержит вход 140a, через который подается воздух, содержащий пыль, и выход 140b, через который выпускается воздух с отфильтрованной пылью. На этом чертеже в качестве примера показано то, что вход 140a и выход 140b образованы на боковой поверхности наружного кожуха 141a соответственно. Вход 140a и выход 140b могут быть расположены на одной и той же высоте. На этом чертеже в качестве примера показано то, что вход 140a и выход 140b образованы рядом друг с другом на верхнем конце наружного кожуха 141a.
По меньшей мере, один циклон может быть расположен в наружном кожухе 141a. Например, первый циклон 147a, фильтрующий пыль из воздуха, подаваемого через вход 140a, и второй циклон 147b, расположенный в первом циклоне 147a для фильтрации тонкодисперсной пыли, могут быть расположены в наружном кожухе 141a.
Воздух, содержащий пыль, подаваемый в пылесборник 140 через вход 140a, проходит по первому циклону 147a по пустой области, которая образована между наружным кожухом 141a и внутренним кожухом 141h. Во время прохождения относительно тяжелая пыль падает вниз и собирается, и относительно легкий воздух подается во внутренний кожух 141h через сетчатый фильтр 141h' под действием всасывающей силы. В этом примере тонкодисперсная пыль может также подаваться во внутренний кожух 141h вместе с воздухом.
Сетчатый фильтр 141h' установлен на внутреннем кожухе 141h для пространственного разделения внутренней стороны и наружной стороны внутреннего кожуха 141h. Сетчатый фильтр 141h' образован в сетчатой форме или пористой форме, так что воздух может проходить через него.
Критерий отличия размеров пыли и тонкодисперсной пыли может быть определен с помощью сетчатого фильтра 141h'. Инородные вещества, проходящие через сетчатый фильтр 141h', могут относиться к тонкодисперсной пыли, и инородные вещества, не проходящие через сетчатый фильтр 141h', могут относиться к пыли. Инородные вещества и пыль, которые упали без прохождения через сетчатый фильтр 141h', собираются на первом участке S1 для хранения, расположенным под сетчатым фильтром 141h'. Первый участок S1 для хранения может называться участком для хранения инородных веществ пыли с точки зрения образования области, хранящей инородные вещества и пыль. Первый участок S1 для хранения образован наружным кожухом 141, внутренним кожухом 141h и нижним кожухом 141c.
Защитный элемент 141h1 может быть расположен на нижней стороне сетчатого фильтра 141h' с возможностью выступа по периферии внутреннего кожуха 141h. Защитный элемент 141h1 может ограничивать подачу воздуха в первый участок S1 для хранения, расположенную под защитным элементом 141h1. Это может приводить к предотвращению разлетания инородных веществ и пыли, собранных в первом участке S1 для хранения, и обратного прохождения выше защитного элемента 141h1.
Второй циклон 147b выполнен с возможностью отделения тонкодисперсной пыли от воздуха, поданного в него через сетчатый фильтр 141h'. Второй циклон 147b включает в себя цилиндрический участок и конический участок, проходящий вниз от цилиндрического участка. В цилиндрическом участке воздух вращается за счет направляющей лопасти, расположенной в нем. С другой стороны, в коническом участке тонкодисперсная пыль и воздух отделяются друг от друга. Как показано, может иметься несколько вторых циклонов 147b.
Кроме того, вторые циклоны 147b могут быть расположены внутри первого циклона 147a в направлении вверх и вниз пылесборника 140. В соответствии с данным расположением высота пылесборника 140 может быть уменьшена относительно конструкции расположения вторых циклонов на первом циклоне.
Воздух, поданный во внутренний кожух 141h, подается во входные отверстия 147b' на верхних участках вторых циклонов 147b. Для этой цели пустая область, в которой вторые циклоны 147b не расположены внутри внутреннего кожуха 147h, используется в качестве канала, по которому воздух проходит вверх. Пустая область может быть образована соседними циклонами 147b или внутренним кожухом 141h и вторыми циклонами 147b рядом с внутренним кожухом 141h.
Разгрузочная насадка 147b1, через которую выпускается воздух, от которого отделена тонкодисперсная пыль, расположена в центре верхнего участка каждого второго циклона 147b. В случае данной конструкции входное отверстие 147b' может быть образовано в виде кольцевой области между внутренней периферией второго циклона 147b и наружной периферией разгрузочной насадки 147b1.
Направляющая лопасть, проходящая в спиральной форме по внутренней периферии, расположена во входном отверстии 147b' второго циклона 147b. Направляющая лопасть обеспечивает вращение воздуха, поданного во второй циклон 147b через входное отверстие 147b'.
Разгрузочная насадка 147b1 и направляющая лопасть расположены в цилиндрическом участке второго циклона 147b.
Далее дано подробное объяснение потоков воздуха и тонкодисперсной пыли, поданных во входное отверстие 147b'. Тонкодисперсная пыль постепенно проходит вниз при спиральном движении по орбите вдоль внутренней периферии второго циклона 147b, выгружается через разгрузочное отверстие 147b' и, в конечном счете, собирается во втором участке S2 для хранения. Воздух, который относительно легче тонкодисперсной пыли, выпускается через верхнюю разгрузочную насадку 147b1 под действием всасывающей силы.
Второй участок S2 для хранения может называться участком для хранения тонкодисперсной пыли с точки зрения образования области для хранения тонкодисперсной пыли. Второй участок S2 для хранения является областью, образованной внутренней стороной внутреннего кожуха 141h и нижним кожухом 141c.
Крышка 141k расположена сверху вторых циклонов 147b. Крышка 141k расположена для закрытия входных отверстий 147b' вторых циклонов 147b с заданным интервалом.
Крышка 141k содержит отверстия 141k' для сообщения, соответствующие разгрузочным насадкам 147b1. Крышка 141k может быть расположена для закрытия внутреннего кожуха 141h кроме разгрузочных насадок 147b1.
При этом разделительная пластина 141b2 установлена на наружной периферии вторых циклонов 147b. Разделительная пластина 141b2 делит область таким образом, что воздух, поданный во внутренний кожух 141h через сетчатый фильтр 141h', не смешивается с тонкодисперсной пылью, выгруженной через разгрузочное отверстие 147bʺ. То есть воздух, прошедший через сетчатый фильтр 141h', проходит над разделительной пластиной 141b2, и тонкодисперсная пыль, выгруженная через разгрузочное отверстие 147bʺ, собирается под разделительной пластиной 141b2.
Как показано, разгрузочное отверстие 147bʺ второго циклона 147b имеет форму, позволяющую ему проходить через разделительную пластину 141b2. Разделительная пластина 141b2 может быть выполнена за одно целое со вторым циклоном 147b или может быть установлена на втором циклоне 147b после изготовления в виде отдельного элемента.
Элемент 141g для отделения потока расположен на внутреннем верхнем участке наружного кожуха 141a. Элемент 141g для отделения потока отделяет поток воздуха, подаваемого через вход 140a пылесборника 140, от потока воздуха, выпускаемого через выход 140a пылесборника 140.
Верхний кожух 141b расположен для закрытия элемента 141g для отделения потока, и нижний кожух 141c расположен для закрытия нижнего участка наружного кожуха 141a.
Элемент 141g для отделения потока, верхний кожух 141b, верхняя крышка 141d и фильтр 141f будут описаны ниже.
Поскольку пылесборник 140 выполнен с возможностью соединения с возможностью отсоединения с частью 113 для размещения пылесборника, ручка 143 может быть расположена на пылесборнике 140, так что пылесборник 140 легко удаляется с части 113 для размещения пылесборника. Конструкция, раскрытая в этом примере осуществления, будет описана. Ручка 143 шарнирно соединена с верхним кожухом 141b с возможностью поворота. Часть 142 для размещения ручки с ручкой 143, размещенной на нем, образована на верхнем кожухе 141b.
В положении, в котором крышка 150 пылесборника соединена с пылесборником 140 для закрытия пылесборника 140, ручка 143 может быть прижата крышкой 150 пылесборника для размещения на части 142 для размещения ручки. В положении, в котором крышка 150 пылесборника отделена от пылесборника 140, ручка 143 может выступать от части 142 для размещения ручки. Для этой цели верхний кожух 141b может содержать упругий элемент (не показан), который упруго оказывает давление на ручку 143.
Запирающий крючок 145 может быть образован для выступа от верхнего кожуха 141b. Запирающий крючок 145 образован спереди верхнего кожуха 141b. Здесь передняя сторона верхнего кожуха 141b означает направление к передней стороне корпуса 110 пылесоса, когда пылесборник 140 установлен в нормальном положении части 142 для размещения ручки.
Запирающий крючок 145 размещен в приемной канавке 116a, образованной на утопленном участке 116 корпуса 110 пылесоса. Запирающий крючок 145 может иметь форму, выступающую от наружной периферийной поверхности верхнего кожуха 141b для сгиба крючка вниз. Уступ 116a' образован на приемной канавке 116a, и запирающий крючок 145 может быть выполнен с возможностью блокировки с уступом 116a'.
Фиг.22 - вид снизу пылесборника 140, изображенного на фиг.20.
Нижний кожух 141c может быть соединен с возможностью поворота с наружным кожухом 141a с помощью шарнира 141c'. Блокирующий элемент 141cʺ, расположенный на нижнем кожухе 141c, соединен с возможностью съема с наружным кожухом 141a для обеспечения закрепления нижнего кожуха 141c на наружном кожухе 141a, когда блокирующий элемент 141cʺ соединен с наружным кожухом 141, и обеспечения поворота нижнего кожуха 141c относительно наружного кожуха 141a, когда соединение разъединено.
Нижний кожух 141c соединен с наружным кожухом 141a для образования нижней поверхности первого участка S1 для хранения и второго участка S2 для хранения. Когда нижний кожух 141c поворачивают с помощью шарнира 141c для одновременного открытия первого участка S1 для хранения и второго участка S2 для хранения, пыль и тонкодисперсная пыль могут одновременно выгружаться.
Шарнир 141c' и блокирующий элемент 141cʺ могут быть расположены в положениях, противоположных друг другу с центром нижнего кожуха 141C, который расположен между ними. Когда пылесборник 140 установлен в обычном положении участка 113 для размещения пылесборника, шарнир 141c' и стопорный элемент 141cʺ могут быть закрыты нижней стенкой участка 113 для размещения пылесборника без открытия на наружную сторону.
Установочная канавка 149, соответствующая установочному выступу 113b образована на нижней поверхности нижнего кожуха 141c. Как показано на фиг.21, установочная канавка 149 может быть сформирована рядом с шарниром 131c' и стопорным элементом 141cʺ.
Кроме того, канавка 148, соответствующая выступу 113a, может быть образована на нижней поверхности нижнего кожуха 141c. Канавка 148 может быть образованна в центре пылесборника 140.
Фиг.23 - вид, показывающий положение, в котором пылесборник 140 установлен на части 113 для размещения пылесборника, изображенном на фиг.19.
Как показано на фиг.23, в положении, в котором пылесборник 140 не установлен на части 113 для размещения пылесборника, крышка 150 пылесборника может быть расположена с наклоном вверх с помощью шарнира 150a, который прикладывает упругую вытесняющую силу к верхней стороне крышки 150 пылесборника. Следовательно, пылесборник 140 может перемещаться вниз под наклоном на задней верхней стороне части 113 для размещения пылесборника для размещения на части 113 для размещения пылесборника.
Если пылесборник 140 размещен в нормальном положении части 113 для размещения пылесборника, запирающий крючок, образованный для выступа от наружной периферии пылесборника 140, размещается в приемной канавке 116a, образованной на утопленном участке 116 корпуса 110 пылесоса. Приемная канавка 116a имеет форму, вдавленную дальше относительно утопленного участка 116.
Соответственно, уступ 116a' образован на приемной канавке 116a. Уступ 116a' вставляется во внутреннюю часть запирающего крючка 145 для блокировки при перемещении запирающего крючка 145 в боковом направлении. В положении, в котором крышка 150 пылесборника соединена с пылесборником 140, крышка 150 пылесборника расположена для закрытия запирающего крючка 145.
В положении, в котором пылесборник 140 размещен на части 113 для размещения пылесборника, верхняя поверхность верхнего кожуха 141b может образовывать такую же плоскость, что и утопленный участок 116.
Метка 146 совмещения может быть образована на верхнем участке пылесборника 140, и направляющая метка 116', соответствующая метке 146 совмещения, может быть образована на утопленном участке 116, так что запирающий крючок 145 может размещаться в нормальном положении канавки 116a для размещения. На этом чертеже показано, что метка 146 совмещения выгравирована на верхнем кожухе 141b, и направляющая метка 116' выгравирована на утопленном участке 116.
Приемная канавка 116a может быть образована удлиненной для прохождения к передней стороне корпуса 110 пылесоса. В положении, в котором крышка 150 пылесборника соединена с пылесборником 140, шарнир 150a крышки 150 пылесборника может размещаться в приемной канавке 116a.
Как описано выше, запирающий крючок 145 блокируется на уступе 116a' приемной канавки 116a, так что пылесборник 140 блокирован от перемещения в боковом направлении на части 113 для размещения пылесборника.
Кроме того, как описано выше, установочный выступ 113b части 113 для размещения пылесборника вставляется в установочную канавку 149, образованную на пылесборнике 140. В этом случае пылесборник 140 также блокирован от перемещения в боковом направлении на части 113 для размещения пылесборника.
Таким образом, пылесборник 140 не может отделяться от части 113 для размещения пылесборника, за исключением случаев, когда пылесборник 140 перемещен вверх. В положении, в котором крышка 150 пылесборника закреплена на пылесборнике 140 для закрытия пылесборника 140, пылесборник 140 также блокирован от перемещения вверх. Таким образом, пылесборник 140 не может отделяться от участка 113 для размещения пылесборника.
Фиг.24 - вид спереди пылесборника 140, изображенного на фиг.20, фиг.25 и 26 - виды в изометрии элемента 141g для отделения потока, изображенного на фиг.24, если смотреть с разных направлений. Кроме того, фиг.27 - вид в разрезе по линии A-A, изображенной на фиг.24, фиг.28 - вид левой стороны пылесборника 140, изображенного на фиг.20. Для облегчения понимания потока воздуха внутри пылесборника 140 фиг.29 изображает пылесборник 140 на фиг.20, за исключением верхнего кожуха 141b, и фиг.30 показывает положение, в котором верхний кожух 141b и верхняя крышка 141d отделены от пылесборника 140, изображенного на фиг.20.
Как показано на фиг.24-30 вместе с фиг.20, верхняя крышка 141d выполнена с возможностью открытия/закрытия верхнего отверстия 141b' пылесборника 140. В этом примере осуществления показано, что верхнее отверстие 141b' образовано на верхнем кожухе 141b, и верхняя крышка 141d соединена с возможностью съема с верхним кожухом 141b для открытия/закрытия верхнего отверстия 141b'. Верхнее отверстие 141b' расположено для его перекрытия крышкой 141k.
Верхняя крышка 141d содержит элементы 141d' переключения, которые обеспечивают закрепление верхней крышки 141d на верхнем кожухе 141b и обеспечивают разъединение крепления. Элементы 141d' переключения могут соответственно быть образованы на обеих левой и правой сторонах верхней крышки 141d для обеспечения прижимного действия в направлениях, противоположных друг другу, т.е. внутрь, и возврата в исходное состояние под действием упругой силы.
Верхняя крышка 141d содержит фиксирующие выступы 141dʺ, втягиваемые или перемещаемые назад от наружной периферии верхней крышки 141d в зависимости от переключения элемента 141d переключения. При выполнении нажимного действия элементов 141d' переключения фиксирующие выступы 141dʺ перемещаются назад на участки для размещения, образованные на верхней крышке 141d, без выступа от наружной периферии верхней крышки 141d. Если элементы 141d' переключения возвращаются в исходное состояние под действием упругой силы, фиксирующие выступы 141dʺ выступают от наружной периферии верхней крышки 141d.
Фиксирующая канавка 141bʺ для вставления и закрепления в ней фиксирующих выступов 141dʺ, образована на внутренней поверхности верхнего кожуха 141b, который образует верхнее отверстие 141b'. Фиксирующая канавка 141bʺ может быть образована в положении, соответствующем каждому из фиксирующих выступов 141dʺ, так что фиксирующие канавки 141bʺ находятся напротив друг друга. В качестве альтернативы, фиксирующая канавка 141bʺ может быть образована в петлеобразной форме для прохождения по внутренней поверхности верхнего кожуха 141b. В этом случае предпочтительно, чтобы степень свободы при установке фиксирующих выступов 141dʺ увеличивалась.
Элемент 141g для отделения потока, который отделяет поток воздуха, подаваемого через вход 140a, от потока воздуха, выпускаемого к выходу 140a, и направляет потоки, расположен в пылесборнике 140. На этом чертеже показано, что элемент 141g для отделения потока соединен с верхним концом на внутренней стороне наружного кожуха 141a.
Более подробно рассматривая конструкцию следует отметить, что первое и второе отверстия 141a' и 141aʺ, соответствующие входу 140a и выходу 140b пылесборника 140, образованы на наружном кожухе 141a. Первое отверстие 141g' и второе отверстие 141gʺ, соответствующие первому и второму отверстиям 141a' и 141aʺ, образованы в элементе 141g для отделения потока. В случае этой конструкции, когда элемент 141g для отделения потока соединен с внутренней стороной наружного кожуха 141a, первое отверстие 141a' и первое отверстие 141g' сообщаются друг с другом для образования входа 140a пылесборника 140, второе отверстие 141aʺ и второе отверстие 141gʺ сообщаются друг с другом для образования выхода 140b пылесборника 140.
Элемент 141g для отделения потока может содержать установочные выступы 141g2, которые вставляются в выемки 141a1, образованные на внутренней периферийной поверхности наружного кожуха 141a. Кроме того опорное ребро 141g3 может выступать от верхнего участка элемента 141g для отделения потока по периферии, так что элемент 141g для отделения потока может поддерживаться на верхнем конце наружного кожуха 141a.
Элемент 141g для отделения потока имеет полый участок и содержит участок 141g1 для отделения потока, окружающий полый участок по периферии. Полый участок элемента 141g для отделения потока выполнен с возможностью перекрытия крышки 141k, так что воздух, выпускаемый через отверстия 141k' для сообщения, может подаваться в верхнюю часть участков 141g1 для отделения потока.
Первое и второе отверстия 141g' и 141gʺ образованы на поверхностях элемента 141g для отделения потока, которые находятся напротив друг друга. Как показано на этом чертеже, первое отверстие 141g' образовано на нижней поверхности элемента 141g для отделения потока, так что воздух, подаваемый через вход 140a, проходит на нижний участок элемента 141g для отделения потока. Второе отверстие 141gʺ образовано на верхней поверхности элемента 141g для отделения потока, так что воздух, выпускаемый через выход 140b, проходит на верхний участок элемента 141g для отделения потока.
Элемент 141g для отделения потока образован для создания блокировки между первым отверстием 141g' и вторым отверстием 141gʺ, так что воздух, подаваемый через первое отверстие 141g', и воздух, выпускаемый ко второму отверстию 141gʺ, отделены друг от друга.
Первое отверстие 141g' может содержать направляющий элемент 141g4, который проходит от одной стороны первого отверстия 141g' для направления воздуха, подаваемого в пылесборник 140, для образования вращающегося потока.
Выход 140b пылесборника 140 предпочтительно может быть образован для минимизации потери потока и для приведения в соответствие с периферийными конструкциями без нарушения.
Первое отверстие 141g' и второе отверстие 141gʺ могут быть расположены рядом в боковом направлении по периферии верхнего участка элемента 141g для отделения потока. Соответственно, вход 140a и выход 140b пылесборника 140, соответствующие первому и второму отверстиям 141g' и 141gʺ, соответственно, могут быть образованы на одной и той же высоте пылесборника 140.
Вход 140a образован на верхней части пылесборника 140, так что воздух, подаваемый в пылесборник 140, не распыляет пыль, собранную в нижней части пылесборника 140.
В пылесосе (например, пылесосе вертикального типа, контейнерного типа и т.д.), в котором высота мультициклона меньше ограничена, выход обычно установлен в положении выше положения входа. Однако, в роботе-пылесосе 100 настоящего раскрытия, когда объем пылесборника 140 должен увеличиваться при учете ограничения высоты, выход 140b вместе с входом 140a могут быть образованы на одной и той же высоте пылесборника 140.
В конструкции настоящего раскрытия, в которой воздух, подаваемый через вход 140a, направляется наклоненным вниз участком 141g1 для отделения потока, угол, под которым воздух, подаваемый через вход 140a, проходит вниз, зависит от наклона участка 141g1 для отделения потока. В связи с этим, если наклон участка 141g1 для отделения потока большой, воздух, подаваемый через вход 140a, не получает достаточной центробежной силы и может распылять пыль, собранную в нижней части пылесборника 140.
В связи с этим, наклон участка 141g1 для отделения потока предпочтительно должен быть как можно меньше. Поскольку участок 141g1 для отделения потока проходит от верхней стороны входа 140a к нижней стороне выхода 140b, когда вход 140a и выход 140b образованы на одной и той же высоте пылесборника 140, наклон вниз участка 141g1 для отделения потока становится более плавным, так как длина участка 141g1 для отделения потока становится большей. Соответственно, участок 141g1 для отделения потока образован самым длинным, когда второе отверстие 141gʺ расположено непосредственно рядом с первым отверстием 141g'. В результате направляющий элемент 141a имеет самый плавный наклон.
На этом чертеже показана конструкция, в которой вход 140a и выход 140b образованы рядом в боковой направлении на верхнем конце наружного кожуха 140a. Элемент 141g для отделения потока может иметь форму, наклонную вниз по спирали по внутренней периферийной поверхности наружного кожуха 140a от верхнего конца первого отверстия 141g' до нижнего конца второго отверстия 141gʺ.
Внутренний кожух 141h, крышка 141k и элемент 141g для отделения потока соединены вместе. Как показано, внутренний кожух 141h может содержать соединительные выступы 141hʺ для соединения с крышкой 141k и элементом 141g для отделения потока.
Мультициклон расположенный внутри пылесборника 140 фильтрует инородные вещества или пыль из воздуха, подаваемого в пылесборник 140 через вход 140a. Воздух с отфильтрованными инородными веществами или пылью, опускается и проходит к выходу 140b в верхней части участка 141g1 для отделения потока. В настоящем раскрытии пылесборник 140 имеет конструкцию, в которой инородные вещества или пыль снова отфильтровываются перед окончательным выпуском воздуха, проходящего, как описано выше, через выход 140b.
Фильтр 141f, который проходит через мультициклон и затем фильтрует инородные вещества или пыль из воздуха, выпускаемого к выходу 140b, расположен на задней поверхности верхней крышки 141d. Фильтр 141f расположен для закрытия крышки 141k, так что пыль из воздуха, проходящего через разгрузочную насадку второго циклона 147b, может отфильтровываться фильтром 141f.
В положении, в котором верхняя крышка 141d установлена на верхнем кожухе 141b, фильтр 141f расположен с возможностью закрытия крышки 141k. Например, фильтр 141f может быть плотно приклеен к верхней поверхности участка 141g1 для отделения потока или плотно приклеен плотно к верхней поверхности крышки 141k.
Фильтр 141f может быть установлен на установочном ребре 141e, выступающем от задней поверхности верхней крышки 141d. На этом чертеже показана конструкция, в которой установочное ребро 141e включает в себя множество выступов 141e' и установочный участок 141eʺ. Установочное ребро 141e может быть выполнено как одно целое с верхней крышкой 141d при литье под давлением верхней крышки 141d.
Выступы 141e' образованы для выступа от задней поверхности верхней крышки 141d и расположены во множестве местоположений соответственно. Установочный участок 141eʺ расположен на конкретном расстоянии от задней поверхности верхней крышки 141d и поддерживается во множестве местоположений множеством выступов 141e'. Установочный участок 141eʺ может быть образован в петлеобразной форме, большим полого участка элемента 141g для отделения потока.
Фильтр 141f включает в себя фильтрующий участок 141f' и уплотняющий участок 141fʺ.
Фильтрующий участок 141f' расположен для закрытия полого участка элемента 141g для отделения потока или крышки 141k с целью фильтрации инородных веществ или пыли из воздуха, выпускаемого через отверстия 141k для сообщения крышки 141k. Фильтрующий участок 141f' может иметь сетчатую форму.
Уплотняющий участок 141fʺ расположен для окружения фильтрующего участка 141f' и установлен на установочном участке 141eʺ для обеспечения закрепления фильтра 141f на установочном ребре 141e. Для закрепления фильтра 141f на установочном ребре 141e канавка для вставки на установочный участок 141eʺ может быть образована на уплотняющем участке 141fʺ. Уплотняющий участок 141fʺ может быть плотно приклеен к верхней поверхности участка 141g1 для отделения потока или плотно приклеен к верхней поверхности крышки 141k для закрытия отверстий 141k' для сообщения крышки 141k.
В соответствии с вышеописанной конструкцией воздух, из которого инородные вещества или пыль отфильтрованы мультициклоном, выпускается к выходу 140b через пустую область между выступами 141e' путем прохождения через фильтрующий участок 141f'. Здесь пустая область образована на наружной периферии фильтра 141f и сообщается с верхней частью участка 141g1 для отделения потока. Кроме того, уплотняющий участок 141fʺ выполнен с возможностью уплотнения зазора между фильтром 141f и верхней поверхностью участка 141g1 для отделения потока, плотно приклеенного к фильтру 141f, или верхней поверхностью крышки 141k, так что можно предотвращать выход инородных веществ или пыли из воздуха к выходу 140b через зазор.
Другие конкретные компоненты пылесборника 140 имеют структурные связи с крышкой 150 пылесборника и, следовательно, будут описаны с крышкой 150 пылесборника.
Фиг.31 - вид крышки 150 пылесборника, изображенной на фиг.1, и фиг.32 - вид в изометрии с пространственным разделением элементов крышки 150 пылесборника, изображенной на фиг.31.
Как показано на фиг.31 и 32 вместе с фиг.1-3, крышка 150 пылесборника соединена с возможностью поворота с корпусом 110 пылесоса с помощью шарнира 150a и расположена для полного закрытия верхней поверхности пылесборника 140, когда крышка 150 пылесборника соединена с пылесборником 140. В этом положении расположения часть крышки 150 пылесборника размещена на части 113 для размещения пылесборника, и другая часть крышки 150 пылесборника может быть образован для выступа к задней стороне корпуса 110 пылесоса (т.е. в обратном направлении R, противоположном направлению F вперед). Шарнир 150a выполнен с возможностью упругого выталкивания крышки 150 пылесборника в направлении вверх. Следовательно, когда крышка 150 пылесборника не соединена с пылесборником 140, крышка 150 пылесборника может быть наклонена вверх с наклоном относительно верхней поверхности пылесборника 140.
Крышка 150 пылесборника может быть образована в эллиптической форме удлиненной в направлении вперед-назад корпуса 110 пылесоса для полного закрытия круглого пылесборника 140, когда крышка 150 пылесборника соединена с пылесборником 140. Утопленный участок 116, вдавленный от верхней поверхности корпуса 110 пылесоса, образован по наружной периферии части 113 для размещения пылесборника в корпусе 110 пылесоса (см. фиг.19 и 23). Крышка 140 пылесборника размещается на части 113 для размещения пылесборника посредством ее поворота. При этом крышка 150 пылесборника расположена для одновременного закрытия верхней поверхности пылесборника и утопленного участка 116. Длина от передней стороны к задней стороне крышки 150 пылесборника, соответствующая направлению от передней стороны к задней стороне корпуса 110 пылесоса, может быть больше длины в направлении слева направо крышки 150 пылесборника, соответствующем направлению слева направо корпуса 110 пылесоса. Направление слева направо равно или больше радиуса крышки 150 пылесборника.
Крышка 150 пылесборника может содержать, по меньшей мере, одно из сенсорной клавиши 150', сенсорного экрана 150ʺ и дисплея (не показан). Сенсорный экран 150ʺ может отличаться от дисплея, который выдает визуальную информацию, но не имеет сенсорную функцию, тем, что сенсорный экран 150ʺ выдает визуальную информацию и получает сенсорный ввод визуальной информации.
Крышка 150 пылесборника может включать в себя верхнюю крышку 151, нижнюю крышку 152 и среднюю раму 153 между верхней крышкой 151 и нижней крышкой 152. Компоненты могут быть образованы из синтетической смолы.
Верхняя крышка 151 может быть выполнена прозрачной. Например, сама верхняя крышка может быть образована полупрозрачной. В качестве альтернативы, сама верхняя крышка может быть образована прозрачной, и пленка, закрепленная на задней поверхности верхней крышки 151, может быть образована полупрозрачной. Так как верхняя крышка 151 является прозрачной, пиктограмма сенсорной клавиши 150' или визуальная информация, выдаваемая с сенсорного экрана 150ʺ или дисплея, может передаваться пользователю через верхнюю крышку 151.
Тактильный датчик, который определяет сенсорный ввод на верхнюю крышку 151, может быть закреплен на задней поверхности верхней крышки 151. Тактильный датчик может образовывать модуль 154a сенсорной клавиши и/или модуль 154b сенсорного экрана, которые будут описаны ниже.
Нижняя крышка 152 соединяется с верхней крышкой 151, так что верхняя крышка 151 и нижняя крышка 152 образуют внешний вид крышки 150 пылесборника. Нижняя крышка 152 может быть образована из непрозрачного материала и образовывать установочную поверхность, на которой могут быть установлены электронные устройства или вспомогательная печатная плата 151 в крышке 150 пылесборника.
Шарнир 150a, соединенный с возможностью поворота с корпусом 110 пылесоса, может быть соединен с верхней крышкой 151 или нижней крышкой 152. Шарнир 150a может быть расположен на верхней крышке 151 или нижней крышке 152.
Электронные устройства или вспомогательная печатная плата 157 могут быть установлены на нижней крышке 152. Например, вспомогательная печатная плата 157, электрически соединенная с основной печатной платой (не показана) корпуса 110 пылесоса, может быть установлена на нижней крышке 152. Основная печатная плата может быть выполнена в виде, например, контроллера для управления различными функциями робота-пылесоса 100.
Различные электронные устройства установлены на вспомогательной печатной плате 157. На фиг.23 показано, что модуль 154a сенсорной клавиши, модуль 154b сенсорного экрана и инфракрасные приемные устройства 156 (например, инфракрасные датчики) электрически соединены на вспомогательной печатной плате 157. Электрическое соединение включает в себя не только то, что электронные устройства установлены на вспомогательной печатной плате 157, но также то, что электронные устройства соединены с вспомогательной печатной платой 157 с помощью гибкой печатной платы (FPCB).
Пиктограмма напечатана на верхней крышке над модулем 154a сенсорной клавиши, и модуль 154a сенсорной клавиши выполнен с возможностью восприятия сенсорного ввода на пиктограмму верхней крышки 151. Модуль 154a сенсорной клавиши может включать в себя тактильный датчик, и тактильный датчик может быть расположен с возможностью закрепления на задней поверхности верхней крышки 151 или рядом с задней поверхностью верхней крышки 151. Модуль 154a сенсорной клавиши может дополнительно включать в себя устройство подсветки, которое освещает пиктограмму.
Модуль 154b сенсорного экрана образует выходной интерфейс между роботом-пылесосом 100 и пользователем через вывод визуальной информации. Одновременно, модуль 154b сенсорного экрана воспринимает сенсорный ввод на верхнюю крышку 151 для образования входного интерфейса между роботом-пылесосом 100 и пользователем. Модуль 154b сенсорного экрана включает в себя дисплей, который выводит визуальную информацию через верхнюю крышку 151, и тактильный датчик, который воспринимает сенсорный ввод на верхнюю крышку 151, и дисплей и тактильный датчик образуют многослойную структуру или выполнены как одно целое, таким образом, получая сенсорный экран.
Модуль 154b сенсорного экрана может быть размещен в сквозном отверстии 153b средней рамы 153 для соединения со средней рамой 153 с помощью склеивания, соединения крючком или тому подобным. В этом случае модуль 154b сенсорного экрана может быть электрически соединен с вспомогательной печатной платой 157 с помощью гибкой печатной платы (FPCB). Модуль 154b сенсорного экрана может быть закреплен на задней поверхности верхней крышки 151 или расположен рядом с задней поверхностью верхней крышки 151.
Крышка 150 пылесборника может содержать датчик 155 ускорения. Датчик 155 ускорения может быть установлен на вспомогательной печатной плате 157 или электрически соединен с вспомогательной печатной платой 157 с помощью гибкой печатной платы (FPCB). Датчик 155 ускорения определяет гравитационное ускорение, действующее на датчик 155 ускорения, которое разделено на X, Y и Z векторы, перпендикулярные друг к другу.
Контроллер может определять была ли открыта/закрыта крышка 150 пылесборника, используя величины X, Y и Z векторов, измеренные датчиком 155 ускорения. Конкретно, на основании положения, в котором крышка 150 пылесборника закрыта, по меньшей мере, две величины векторов изменены в положении, в котором крышка 150 пылесборника открыта (наклонена). То есть, величины векторов, измеренные с помощью датчика 155 ускорения, изменены в зависимости от степени, до которой крышка 150 пылесборника наклонена.
Когда разность между величинами векторов в двух положениях равна или больше заданной референсной величины, контроллер может определять, что крышка 150 пылесборника не была соединена с пылесборником 140, и вырабатывать соответствующий сигнал управления. Например, если крышка 150 пылесборника находится в наклонном положении при ее открытии, контроллер 155 может определять наклонное положение для прекращения приведения в движение узла 111 колес и генерировать сигнал предупреждения.
Кроме того, если приложена вибрация к крышке 150 пылесборника, величины векторов, измеренные с помощью датчика 155 ускорения, изменены. Когда в заданный интервал времени измерено, что разность между величинами векторов равна или больше заданной референсной величины, то состояние модуля 154b сенсорного экрана может быть изменено от нерабочего (выключенного) состояния до рабочего (включенного) состояния. Например, если пользователь открывает крышку 150 пылесборника много раз в состоянии, в котором модуль 154b сенсорного экрана не активирован, контроллер может определить намерение пользователя на включение пылесоса с помощью датчика 155 ускорения для изменения состояния модуля 154b сенсорного экрана с нерабочего состояния на рабочее состояние.
Гиродатчик может быть использован вместо датчика 155 ускорения. Кроме того, датчик 155 ускорения и гиродатчик могут использоваться вместе, так что улучшенные результаты измерения могут быть получены с помощью дополняющего взаимодействия.
Инфракрасные приемные устройства 156 могут быть расположены в угловых положениях вспомогательной печатной платы 157 для приема инфракрасных сигналов, передаваемых с разных направлений друг от друга. Инфракрасный сигнал может быть сигналом, выдаваемым с дистанционного контроллера (не показан), для управления роботом-пылесосом 100 при манипуляции дистанционного контроллера.
Средняя рама 153 расположена для закрытия вспомогательной печатной платы 157 и имеет сквозные отверстия 153a и 153b, соответственно, соответствующие модулю 154a сенсорной клавиши и модулю 154b сенсорного экрана, которые установлены на вспомогательной печатной плате 157. Внутренние поверхности, образующие сквозные отверстия 153a и 153b, образованы для окружения модуля 154a сенсорной клавиши и модуля 154b сенсорного экрана соответственно.
Приемный участок 153c, который расположен для закрытия верхнего участка каждого из инфракрасных приемных устройств 156 и имеет открытую переднюю сторону для приема инфракрасного света, может быть расположен в каждом угловом положении средней рамы 153. В соответствии с вышеописанным расположением инфракрасное приемное устройство 156 расположено для обращения к боковой поверхности крышки 150 пылесборника (конкретно, боковой поверхности верхней крышки 151, являющейся прозрачной). Поскольку верхний участок инфракрасного приемного устройства 156 закрыт приемным участком 153c, можно предотвращать нарушение работы инфракрасного приемного устройства 156, вызванное трехволновой лампой, расположенной на потолке, или солнечным освещением.
По меньшей мере, один участок крышки 150 пылесборника может быть расположен для выступа дальше верхней поверхности корпуса 110 пылесоса. Как показано на этих чертежах, верхняя крышка 151 может содержать конусный участок 151a, проходящий вниз под наклоном к наружной стороне от ее верхней поверхности. Конусный участок 151a может быть образован для прохождения по наружной периферии верхней крышки 151 и быть расположен для выступа дальше верхней поверхности корпуса 110 пылесоса в положении, в котором крышка 150 пылесборника соединена с пылесборником 140, как показано на фиг.3. Если боковая поверхность, проходящая вертикально вниз от верхней поверхности верхней крышки 151, образована непрерывной, инфракрасный сигнал, подаваемый на верхнюю крышку 151 на угловом участке верхней крышки 151, преломляется или отражается и, следовательно, эффективность приема инфракрасного приемного устройства 156 может быть ухудшена. Кроме того, если боковая поверхность верхней крышки 151 полностью закрыта верхней поверхностью корпуса 110 пылесоса, эффективность приема инфракрасного приемного устройства 156 может быть дополнительно ухудшена.
Однако, в соответствии с вышеописанной конструкцией инфракрасный сигнал, подаваемый на верхнюю крышку 151, может подаваться на инфракрасное приемное устройство 156, расположенное рядом с внутренней стороной конусного участка 151a, не будучи почти преломленным или отраженным конусным участком 151a. Кроме того, так как конусный участок 151a расположен для выступа дальше боковой поверхности корпуса 110 пылесоса, и инфракрасное приемное устройство 156 выполнено в виде нескольких устройств для расположения на конкретном расстоянии друг от друга внутри конусного участка 151a, инфракрасные сигналы могут быть получены во всех направлениях. Таким образом, эффективность приема инфракрасного приемного устройства 156 может быть повышена.
Ниже будет описана крепежная конструкция пылесборника 140.
Фиг.33 - вид задней поверхности крышки 150 пылесборника, изображенной на фиг.31, и фиг.34 - вид в разрезе конструкции, в которой крючок 158, изображенный на фиг.33, закреплен на пылесборнике.
Как показано на фиг.33 и 34 вместе с фиг.20, крышка 150 пылесборника содержит крючок 158, выполненный с возможностью закрепления на блокирующем узле 144 пылесборника 140. На этих чертежах показано, что крючок 158 образован для выступа на одной стороне нижней поверхности нижней крышки 152. Крючок 158 может быть расположен на противоположной стороне шарнира 150a.
Когда крючок 158 закреплен на блокирующем узле 144, ручка 143, расположенная на верхней части пылесборника 140, прижата крышкой 150 пылесборника для размещения в части 142 для размещения ручки. Если крепление между крючком 158 и блокирующим узлом 144 разъединено, ручка 143 выталкивается упругим элементом для выступа от части 142 для размещения ручки. Как описано выше, ручка 143 может быть расположена под наклоном относительно верхнего кожуха 141b.
Блокирующий узел 144, расположенный в пылесборнике 140, включает в себя кнопку 144a и удерживающий элемент 144b. Блокирующий узел 144 выходит на заднюю сторону корпуса 110 пылесоса.
Кнопка 1440 расположена на боковой поверхности пылесборника 140 для обеспечения нажимного действия, и удерживающий элемент 144b выполнен таким образом, что крючок 158 крышки 150 пылесборника может блокироваться с ним. Кроме того, удерживающий элемент 146b выполнен таким образом, что блокировка удерживающего элемента 146b с крючком 158 отпускается при нажимном действии кнопки 144a. Удерживающий элемент 144b может быть образован на верхней части пылесборника 140.
Вышеизложенный случай, когда крючок 158 расположен на крышке 150 пылесборника, и блокирующий узел 144 расположен в пылесборнике 140, был описан в качестве примера, но положения образования крючка 158 и блокирующего узла 144 могут быть изменены относительно друг друга. Другими словами, блокирующий узел может быть расположен на крышке 150 пылесборника, и крючок может быть расположен на пылесборнике 140.
Как описано выше, крышка 150 пылесборника соединена с возможностью съема с пылесборником с помощью крепежной конструкции между крючком 158 и блокирующим узлом 144. То есть, не существует непосредственного крепления между крышкой 150 пылесборника и корпусом 110 пылесоса, и крышка 150 пылесборника закреплена на пылесборнике 140, размещенном на участке 113 для размещения пылесборника.
Как описано выше, пылесборник 140, размещенный на части 113 для размещения пылесборника, блокирован от перемещения в боковом направлении за счет крепления между установочным выступом 113b и установочной канавкой 149 и крепления между запирающим крючком 145 и уступом 116a'. В положении, в котором пылесборник 140 размещен на части 113 для размещения пылесборника, если крышка 150 пылесборника закреплена на пылесборнике 140 в положении, в котором крышка 150 пылесборника закрывает пылесборник 140, то пылесборник 140 также блокирован от перемещения вверх. Таким образом, пылесборник 140 может быть предотвращен от отделения от части 113 для размещения пылесборника.
Когда пылесборник 140 не установлен, крышка 150 пылесборника находится в положении, в котором она свободно поворачивается вокруг шарнира 150a, т.е. незакрепленном положении. Как описано выше, крышка 150 пылесборника может быть расположена с наклоном вверх в незакрепленном положении.
Крышка 150 пылесборника расположена в горизонтальном положении, только когда крышка 150 пылесборника закреплена на пылесборнике 140. Если крышка 150 пылесборника не закреплена на пылесборнике 140, крышка 150 пылесборника находится в положении, в котором она наклонена вверх. В положении, в котором пылесборник 140 не размещен на части 113 для размещения пылесборника, крышка 150 пылесборника также находится в положении, в котором она наклонена вверх.
Таким образом, пользователь может интуитивно проверять, была ли закреплена крышка 150 пылесборника на пылесборнике 140, посредством проверки невооруженным глазом находится ли крышка 150 пылесборника в положении, в котором она наклонена.
При этом воздух, отфильтрованный в пылесборнике 140, выпускается из пылесборника и, в конечном счете, выпускается на наружную сторону через выпускное отверстие 112. Здесь узел 160 фильтра, который фильтрует тонкодисперсную пыль, включенную в отфильтрованный воздух, расположен спереди выпускного отверстия 112. Ниже, будет описан узел 160 фильтра.
Фиг.35 - вид внутренней части участка 113 для размещения пылесборника, изображенного на фиг.19, фиг.36 - концептуальный вид положения, в котором узел 160 фильтра, изображенный на фиг.35, повернут, и фиг.37 - вид в изометрии с пространственным разделением элементов узла 160 фильтра, изображенного на фиг.36.
Как показано на фиг.35-37, узел 160 фильтра размещен в корпусе 110 пылесоса и расположен спереди выпускного отверстия 112. Узел 160 фильтра выходит на наружную сторону, когда пылесборник 140 отделен от части 113 для размещения пылесборника. Здесь выпускное отверстие 112 может быть образовано на внутренней стенке корпуса 110 пылесоса, которая образует часть 113 для размещения пылесборника. Выпускное отверстие 112 может быть образовано на одном (левом или правом) конце корпуса 110 пылесоса, который окружает часть 113 для размещения пылесборника. В этом примере осуществления показано, что выпускное отверстие 112 образовано удлиненным в направлении высоты корпуса 110 пылесоса на левом конце части 113 для размещения пылесборника на чертеже.
Как описано выше, воздух, выпускаемый из второго отверстия 110b, направляется в выпускное отверстие 112 через выпускной канал потока. В конструкции, в которой выпускное отверстие 112 образовано на одном конце корпуса 110 пылесоса, выпускной канал потока проходит к одному концу корпуса 100 пылесоса. Узел 160 фильтра расположен на выпускном канале потока.
Узел 160 фильтра включает в себя корпус 161 фильтра и фильтр 162.
Корпус 161 фильтра содержит шарнир 161c, шарнирно соединенный с внутренней стенкой корпуса 110 пылесоса, которая образует часть 113 для размещения пылесборника. Следовательно, корпус 161 фильтра выполнен с возможностью поворота относительно корпуса 110 пылесоса.
Корпус 161 фильтра включает в себя участок 161a для размещения фильтра и вентиляционное отверстие 161b, которое сообщается с частью 161a для размещения фильтра и расположено для выхода к выпускному отверстию 112. Воздух, подаваемый в корпус 161 фильтра, выпускается в вентиляционное отверстие 161b через фильтр 162, установленный на части 161a для размещения фильтра.
Фильтр 162 установлен на части 161a для размещения фильтра. Высокоэффективный сухой воздушный фильтр для фильтрации тонкодисперсной пыли может быть использован в качестве фильтра 162. Ручка 162a может быть закреплена на фильтре 162.
На фиг.30 показано, что часть 161a для размещения фильтра образована на передней поверхности корпуса 161 фильтра, и вентиляционное отверстие 161b образовано на боковой поверхности корпуса 161 фильтра. Более конкретно, сквозное отверстие 161e образовано на боковой поверхности корпуса 161 фильтра, и направляющая 161f выступает в направлении вставки фильтра 162 на нижней поверхности корпуса 161 фильтра для направления вставки фильтра 162 через сквозное отверстие 161e.
Конструкция, в которой фильтр 162 установлен в корпусе 161 фильтра, не ограничивается этим. В качестве другого примера в отличие от конструкции, изображенной на фиг.30, фильтр 162 может быть установлен на передней поверхности корпуса 161 фильтра для размещения на части 161a для размещения фильтра. В этом случае фильтр 162 может быть закреплен на части 161a для размещения фильтра с помощью соединения крючком.
Корпус 161 фильтра может быть размещен в корпусе 110 пылесоса через отверстие 115, образованное на внутренней стенке корпуса 110 пылесоса, и наружная поверхность корпуса 161 фильтра выходит на наружную сторону в положении, в котором корпус 161 фильтра расположен в корпусе 110 пылесоса, для образования части 161a для размещения фильтра вместе с внутренней стенкой корпуса 110 пылесоса. Для этой цели наружная поверхность корпуса 161 фильтра может иметь закругленную форму и предпочтительно может быть образована в виде криволинейной поверхности, имеющей, по существу, ту же кривизну, что и внутренняя стенка части 113 для размещения пылесборника.
Выступ 161d может быть образован на одной поверхности корпуса 161 фильтра, который образует часть 113 для размещения пылесборника вместе с внутренней стенкой корпуса 110 пылесоса. Как показано на фиг.2 и 19, когда пылесборник 140 размещен на части 113 для размещения пылесборника, пылесборник 140 выполнен с возможностью перекрытия корпуса 161 фильтра, и выступ 161d не выходит на наружную сторону, так как пылесборник 140 закрывает выступ 161d.
Корпус 161 фильтра может быть расположен на части 113 для размещения пылесборника в положении, в котором корпус 161 фильтра повернут для открытия отверстия 115. В соответствии с вышеописанной конструкцией часть 161a для размещения фильтра выходит на наружную сторону, так что фильтр 162 можно легко заменять.
Вышеупомянутые варианты осуществления и преимущества представлены только в качестве примера и не должны истолковываться как ограничивающие настоящее раскрытие. Настоящие идеи могут быть легко применимы к другим типам устройств. Подразумевается, что это описание является иллюстративным и не ограничивает объем формулы изобретения. Многие альтернативы, модификации и изменения будут понятны специалистам в данной области техники. Элементы, конструкции, способы и другие характеристики примеров осуществления, описанных в данном документе, могут быть объединены различными способами для получения дополнительных и/или альтернативных примеров осуществления.
Так как настоящие признаки могут быть воплощены в нескольких формах без отхода от их характеристик, следует также понимать, что вышеописанные варианты осуществления не ограничиваются каким-либо из элементов вышеупомянутого описания, если не указано иное, а скорее должны истолковываться широко в пределах их объема, как определено в прилагаемой формуле изобретения, и, следовательно, все изменения и модификации, которые находятся в пределах формулы изобретения, или, следовательно, эквиваленты таких пределов предназначены для включения прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2703100C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2710413C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2710453C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2701999C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2710412C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2699837C1 |
| ПЫЛЕСОС | 2017 |
|
RU2698846C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2719222C1 |
| РОБОТ-ПЫЛЕСОС | 2003 |
|
RU2269920C2 |
| ПЫЛЕСБОРНИК ДЛЯ ИСПОЛЬЗОВАНИЯ В ПЫЛЕСОСЕ И ОСНОВНОЙ КОРПУС ПЫЛЕСОСА С ТАКИМ ПЫЛЕСБОРНИКОМ | 2002 |
|
RU2228704C2 |
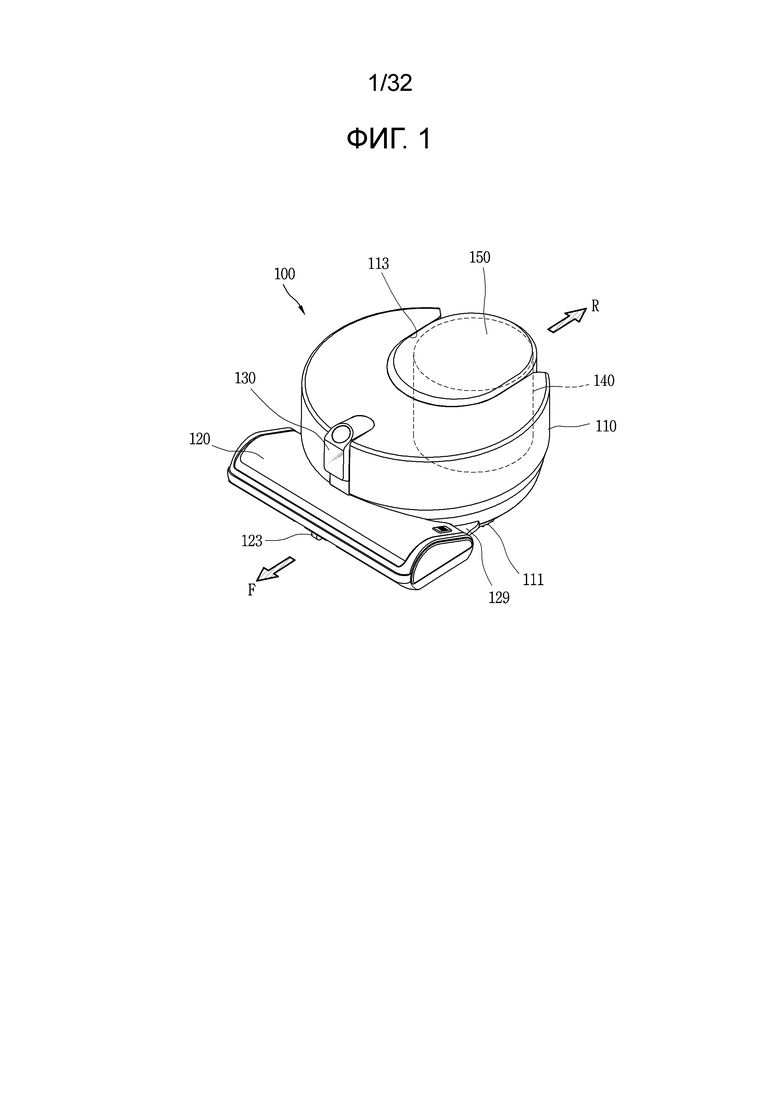
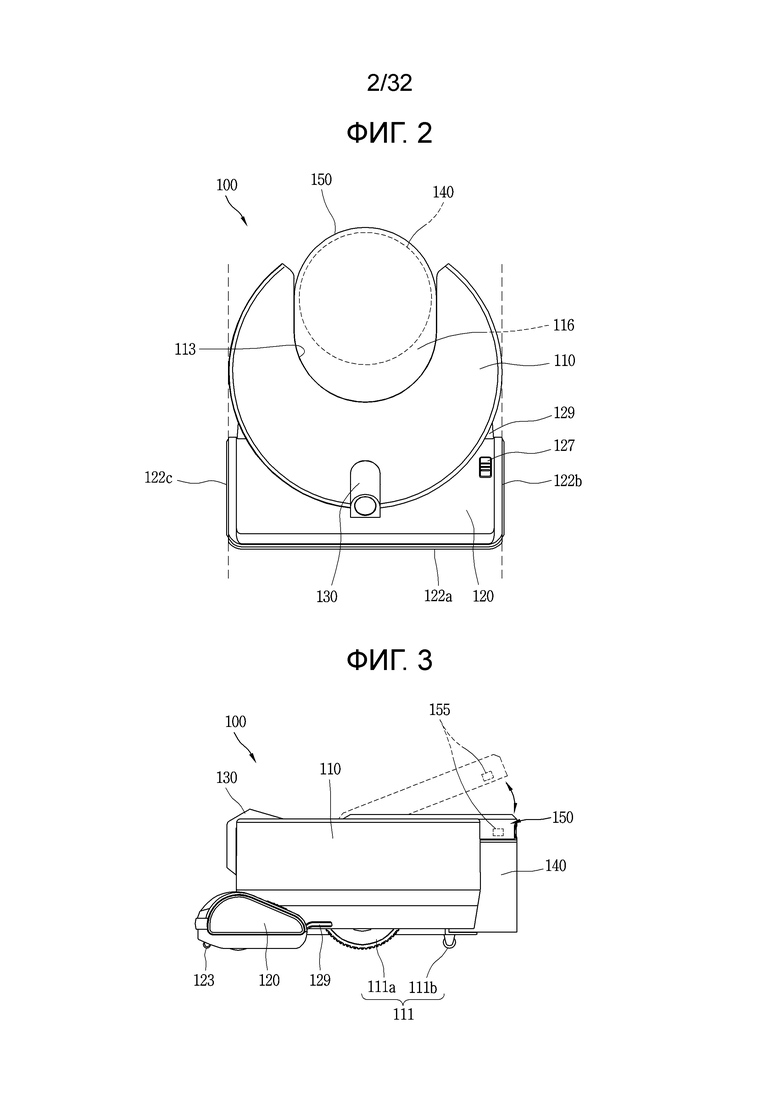

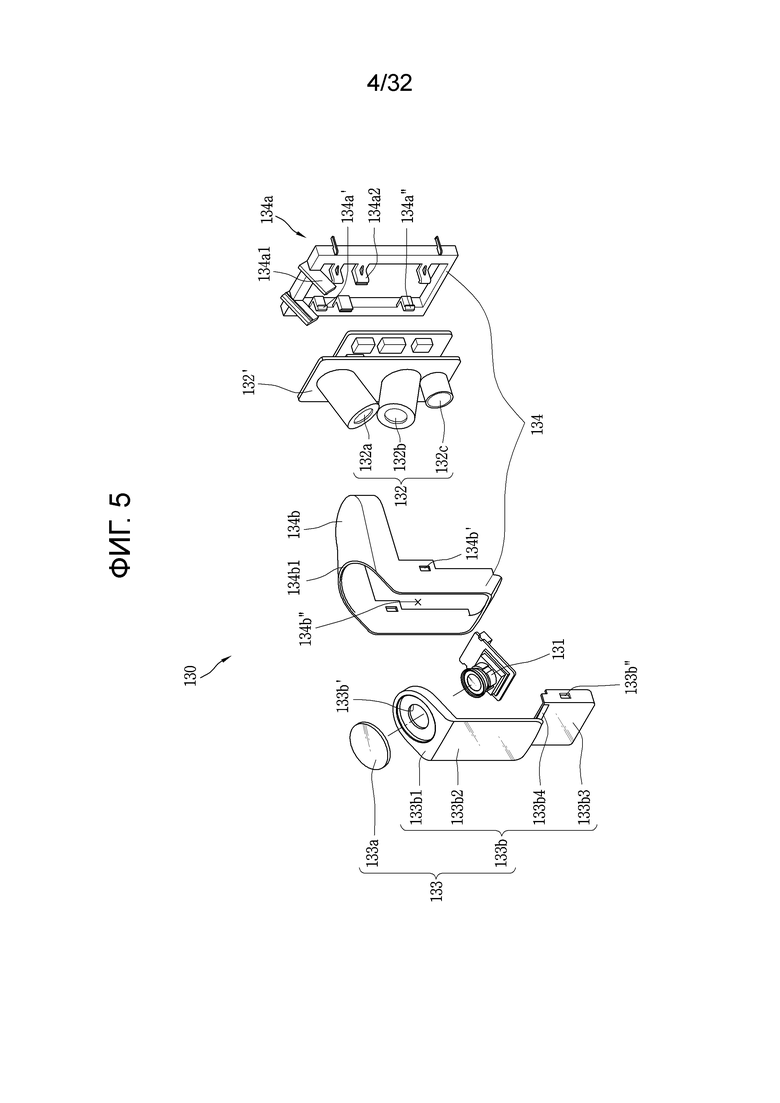
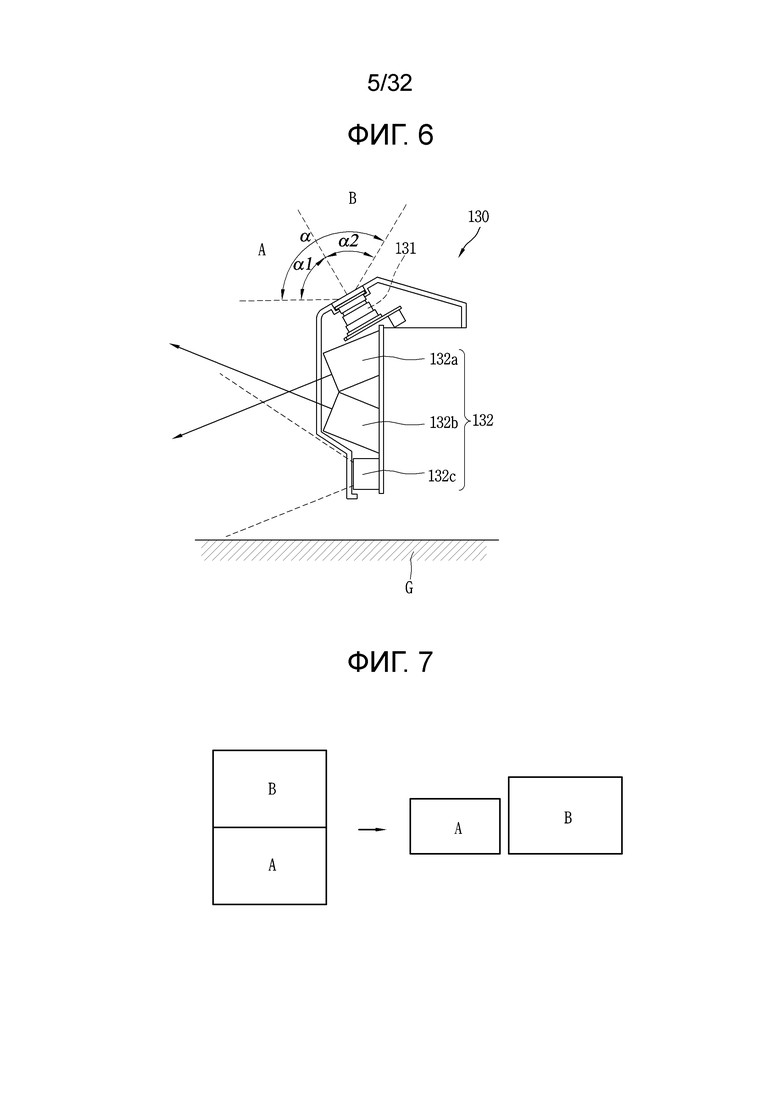
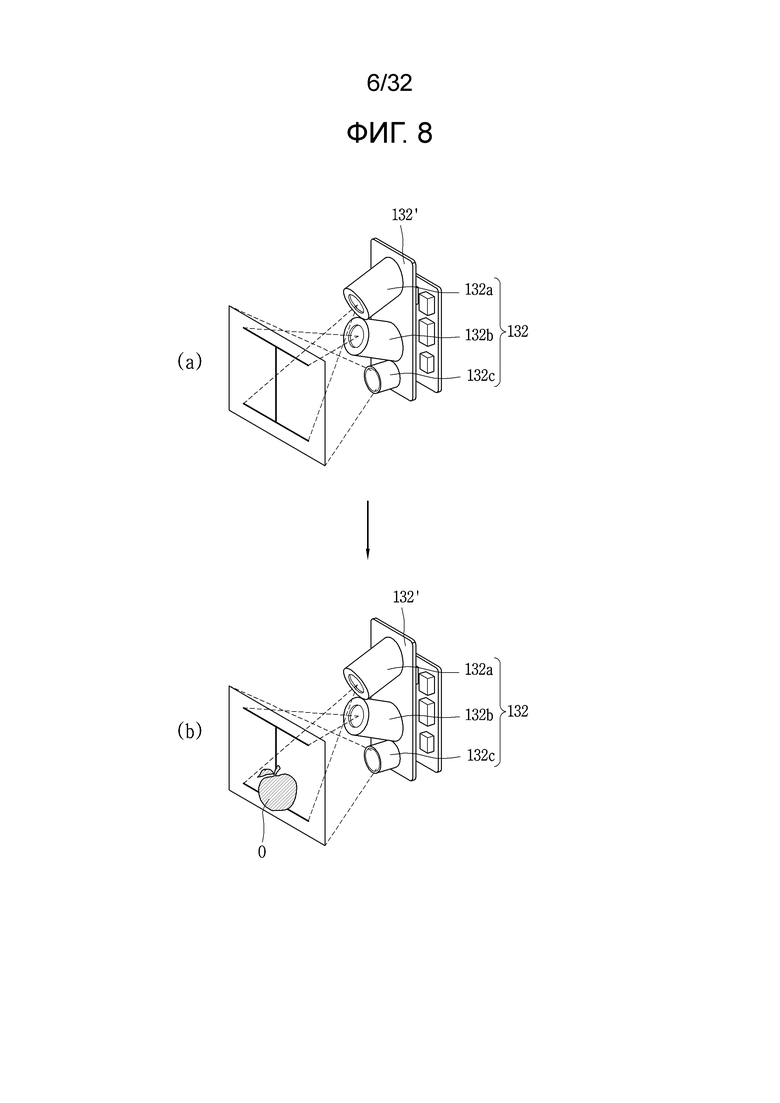
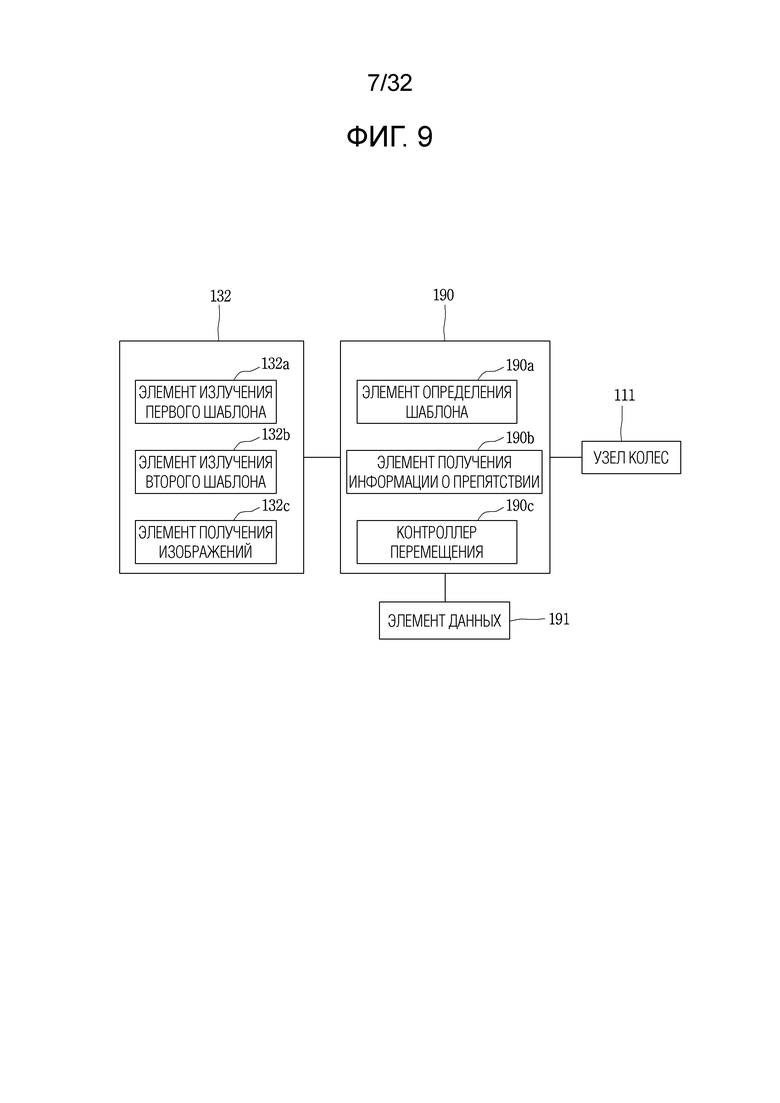
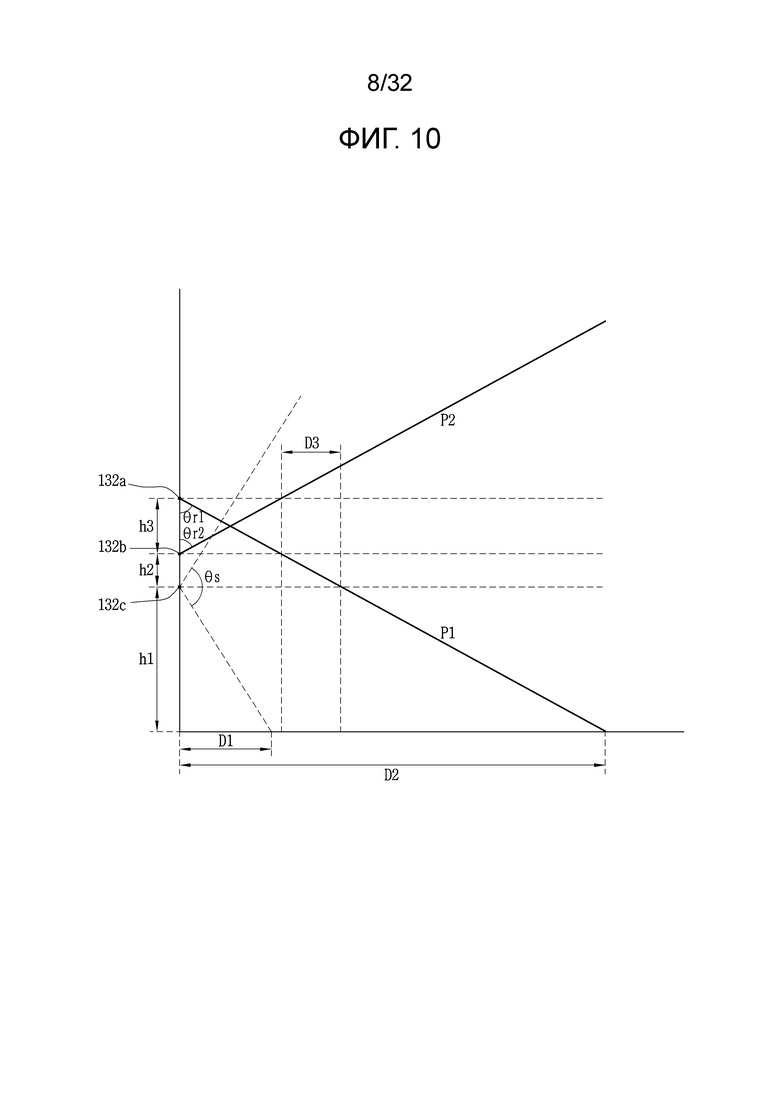

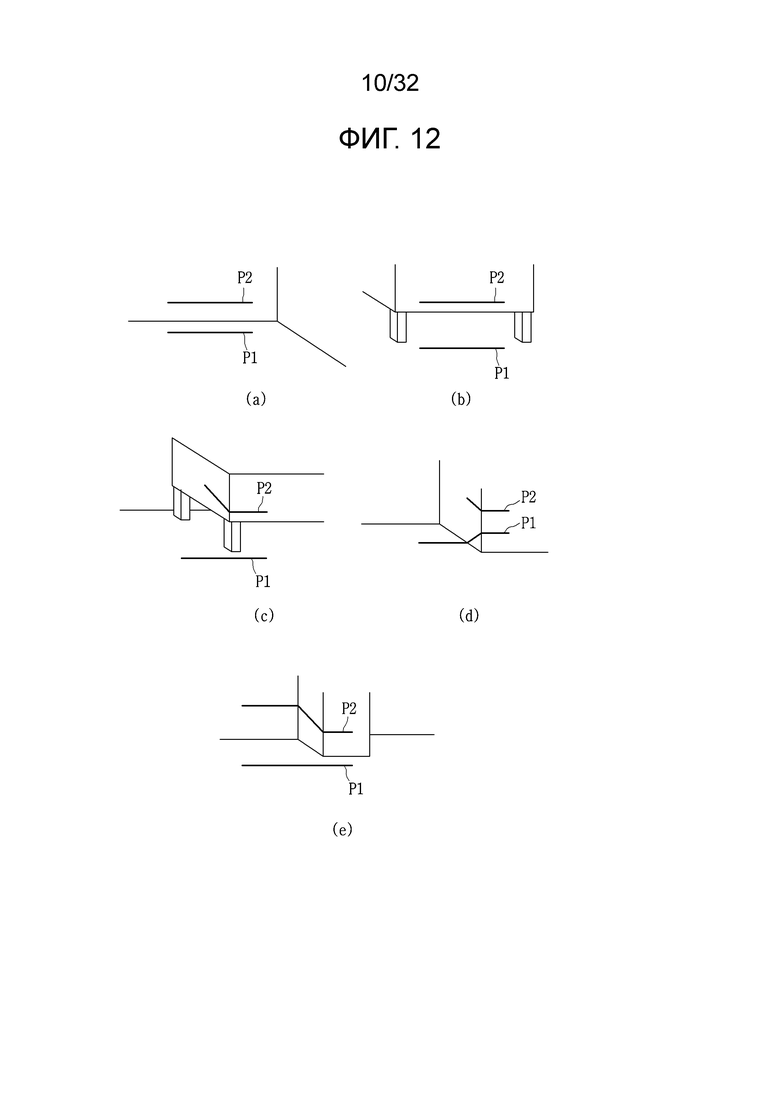
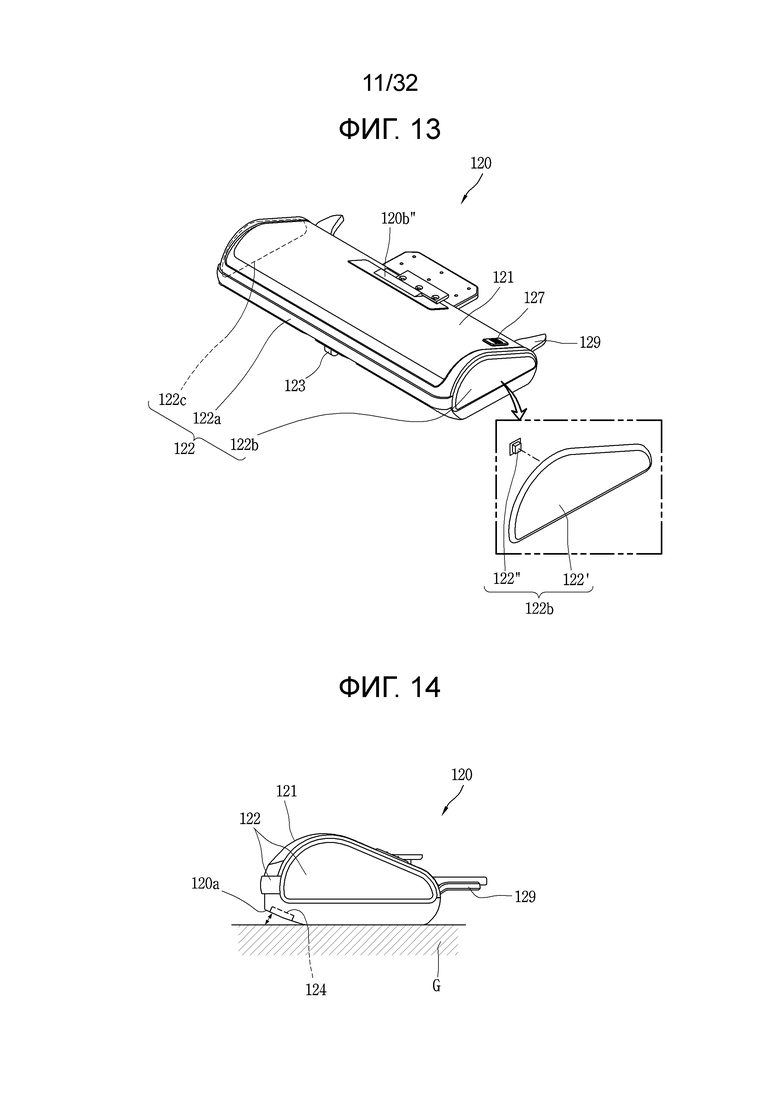
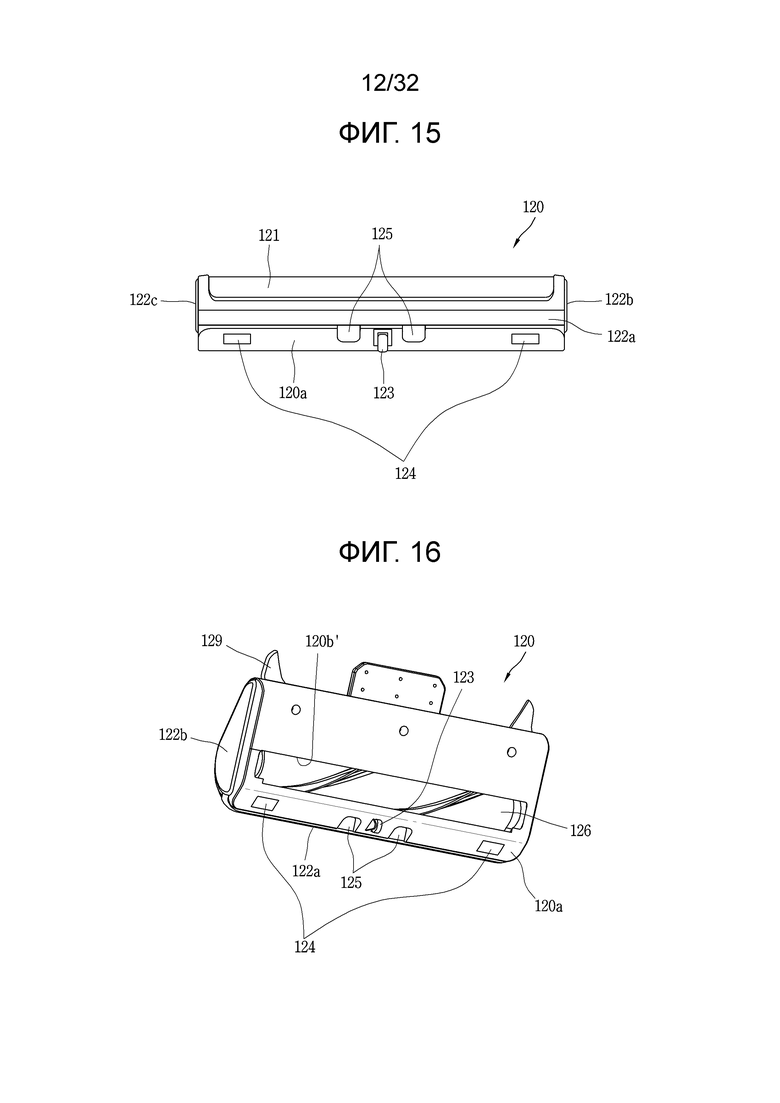
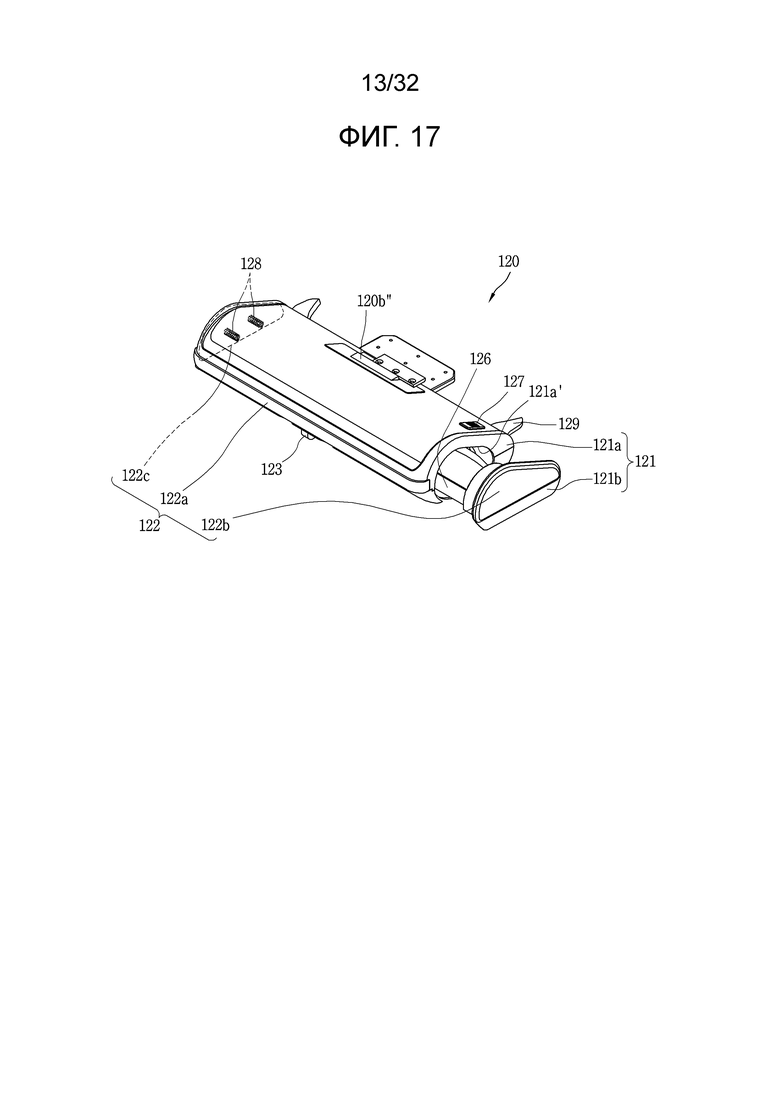
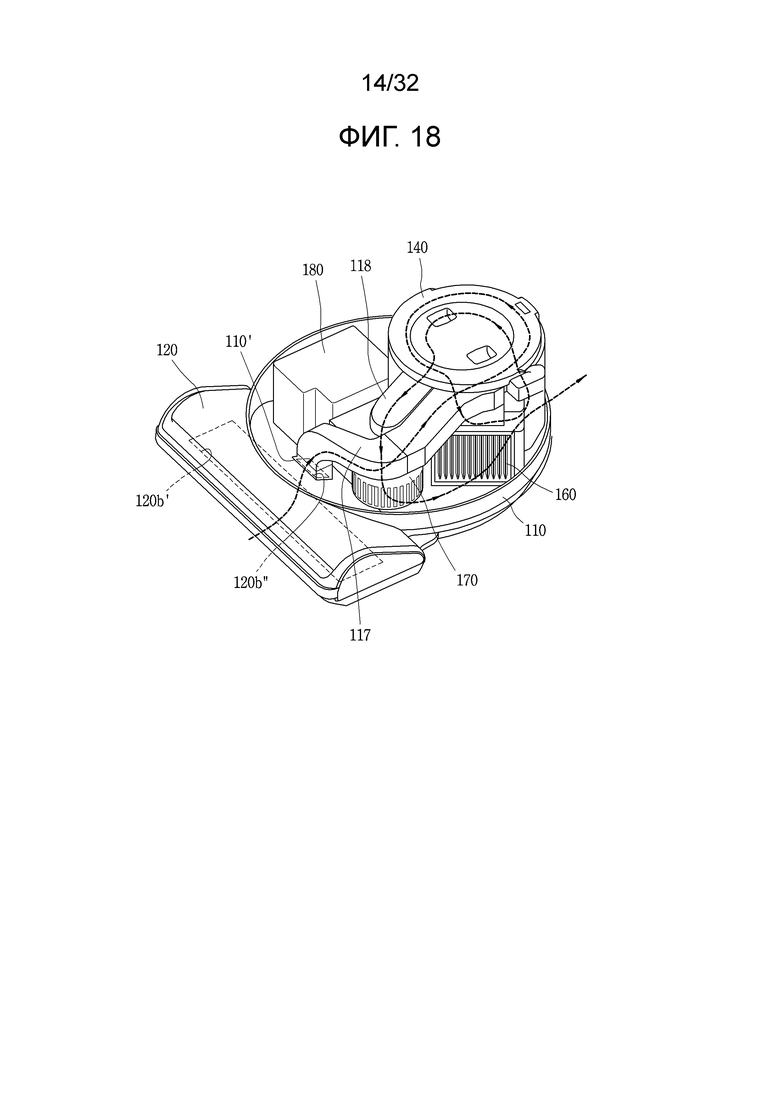
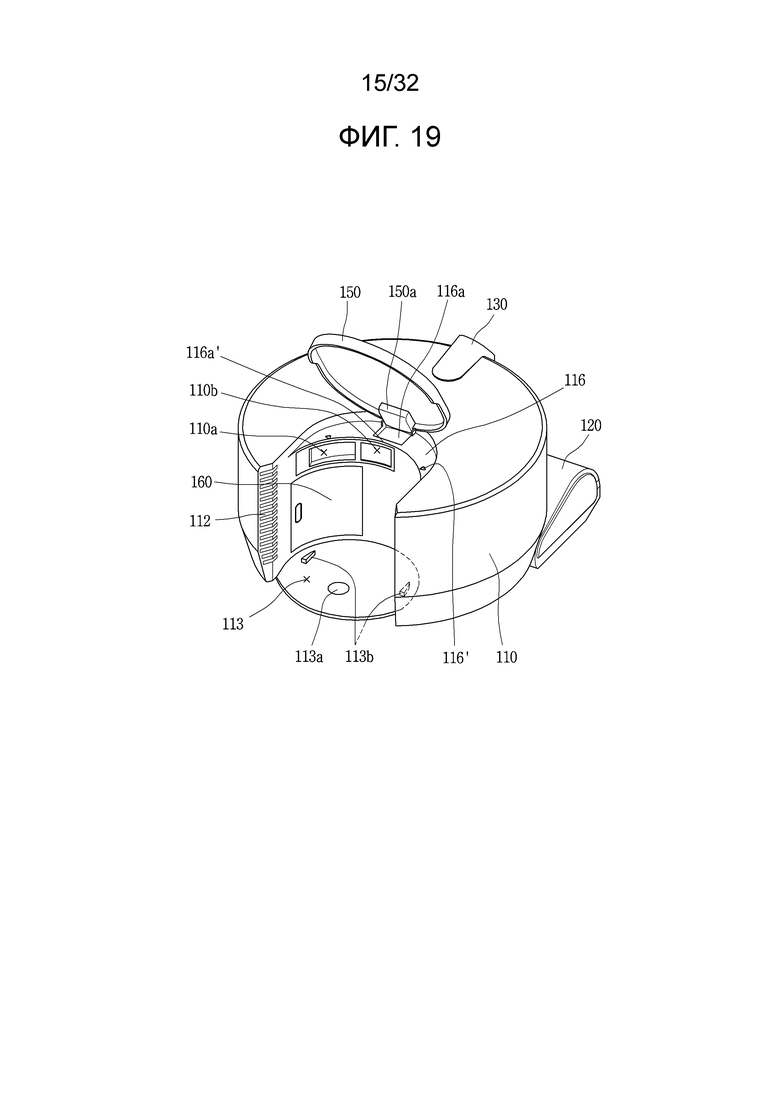
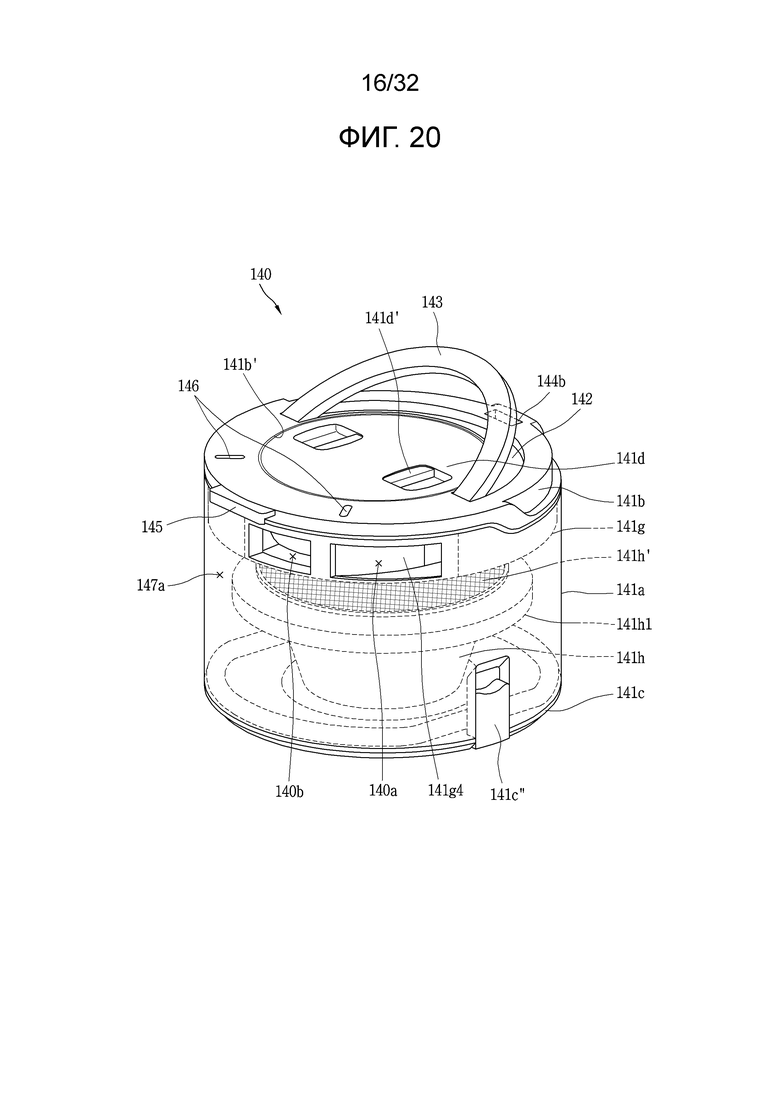
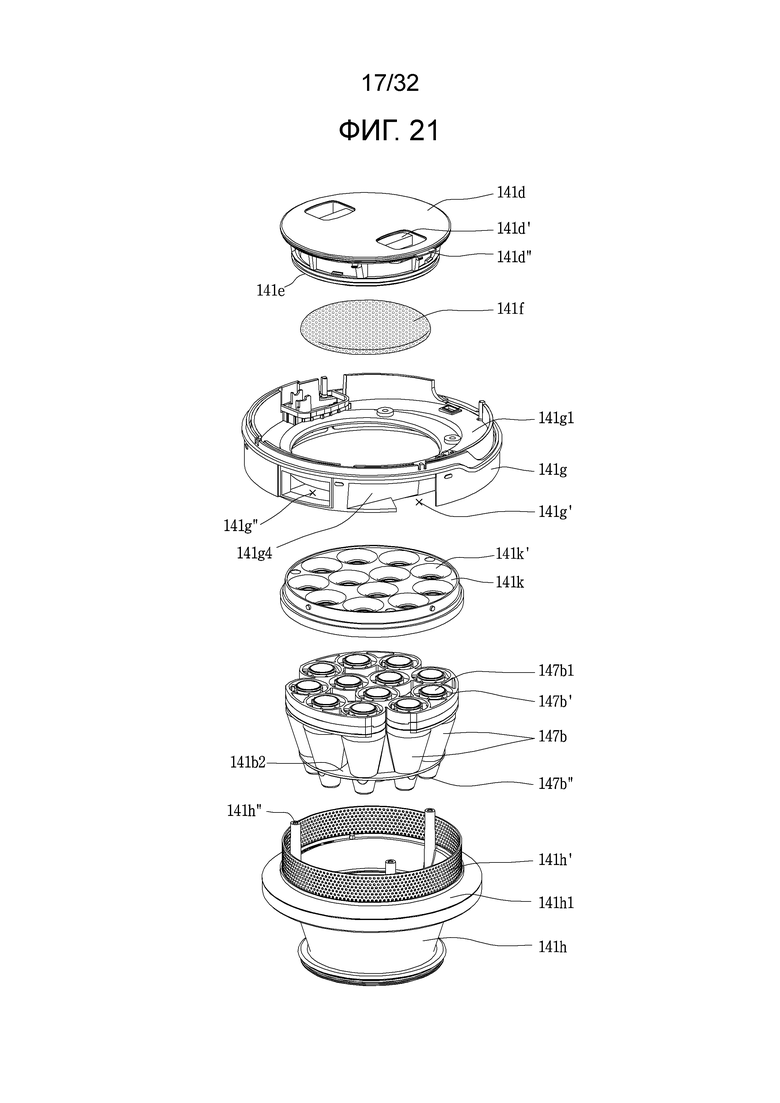
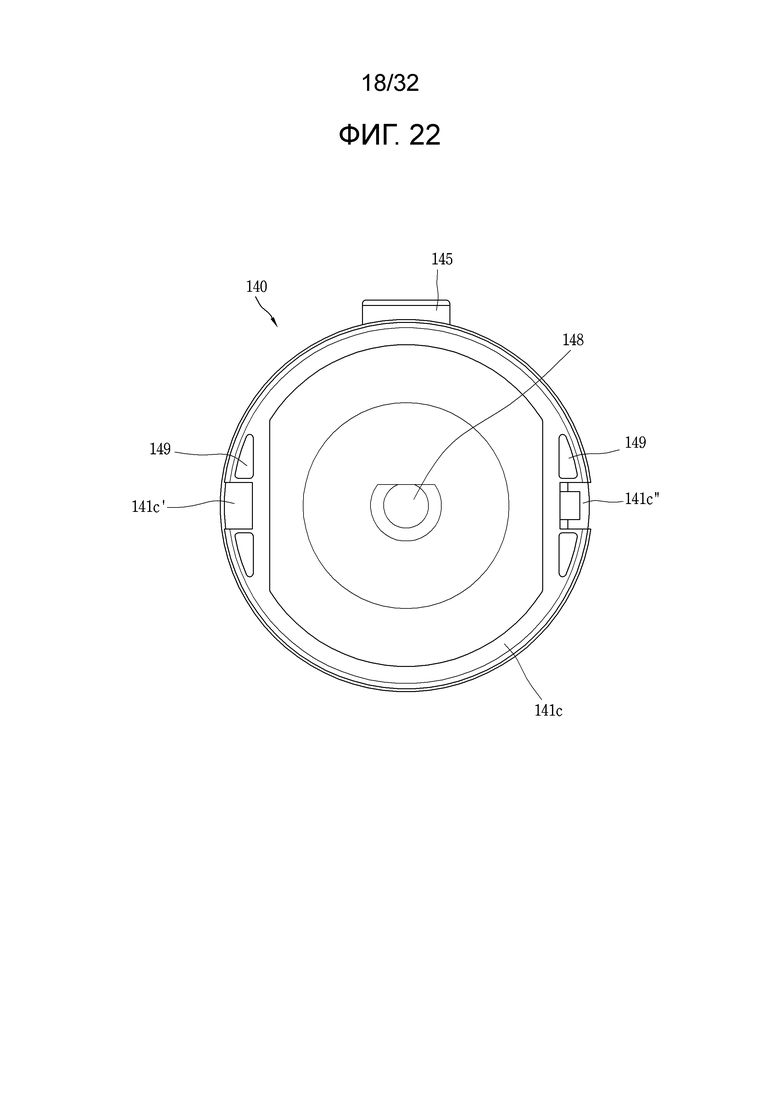
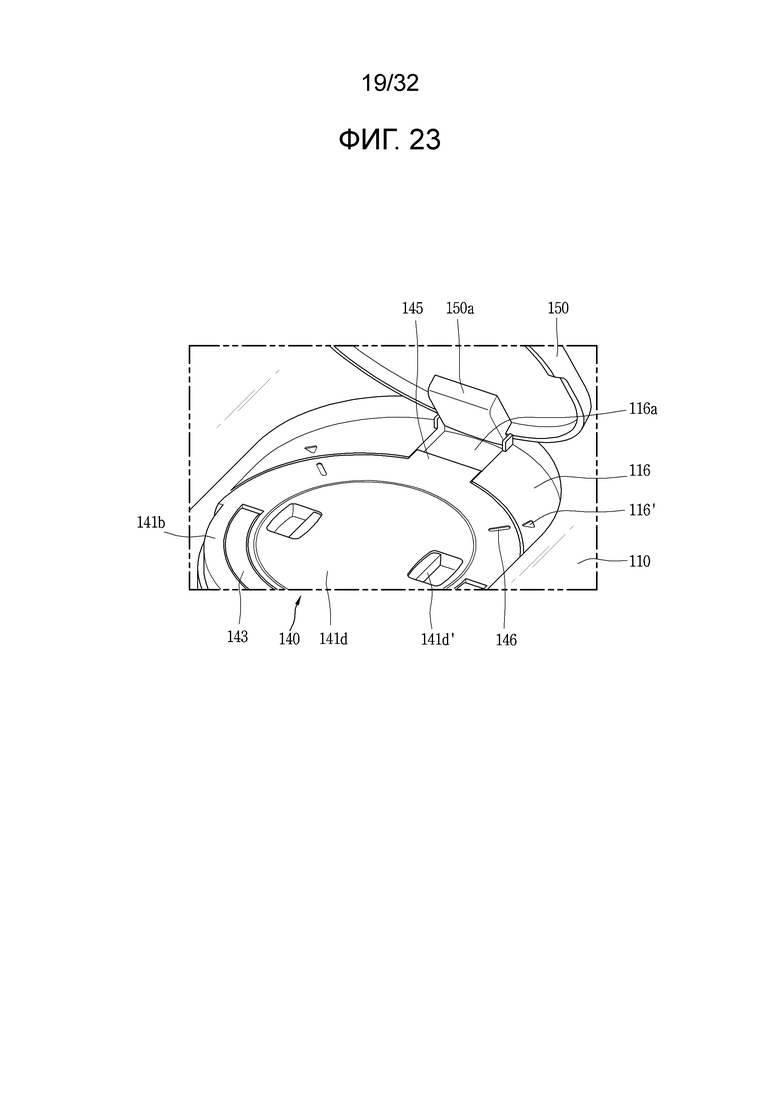
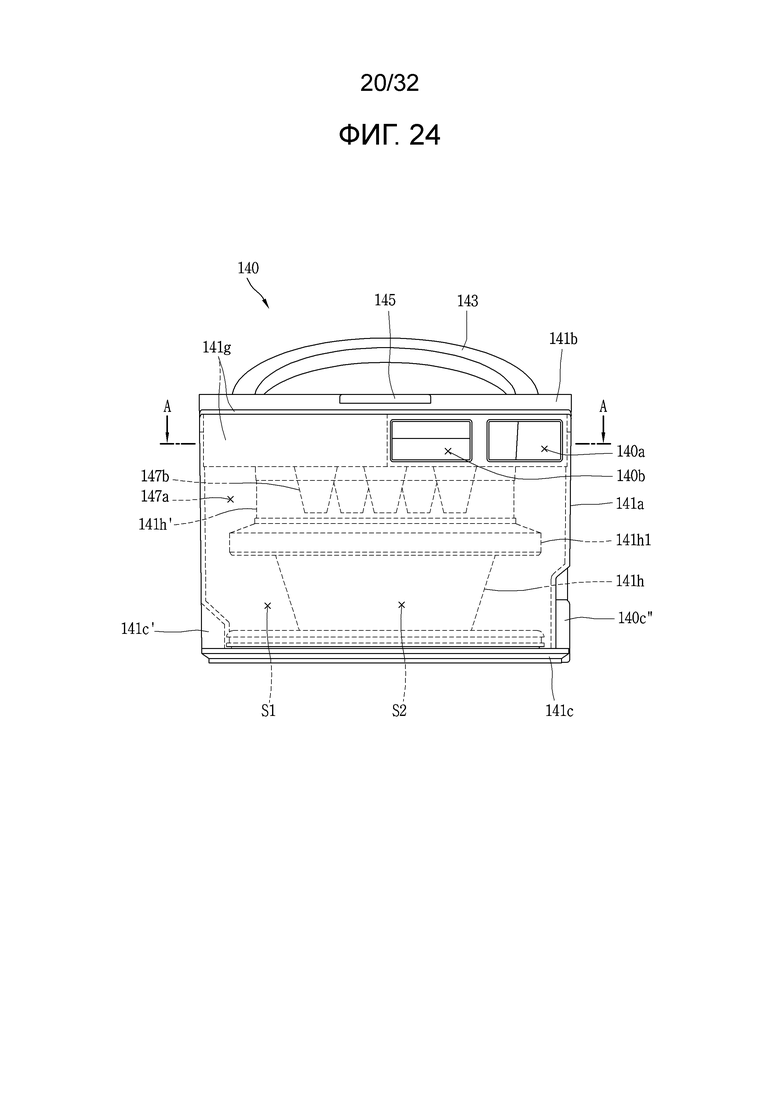
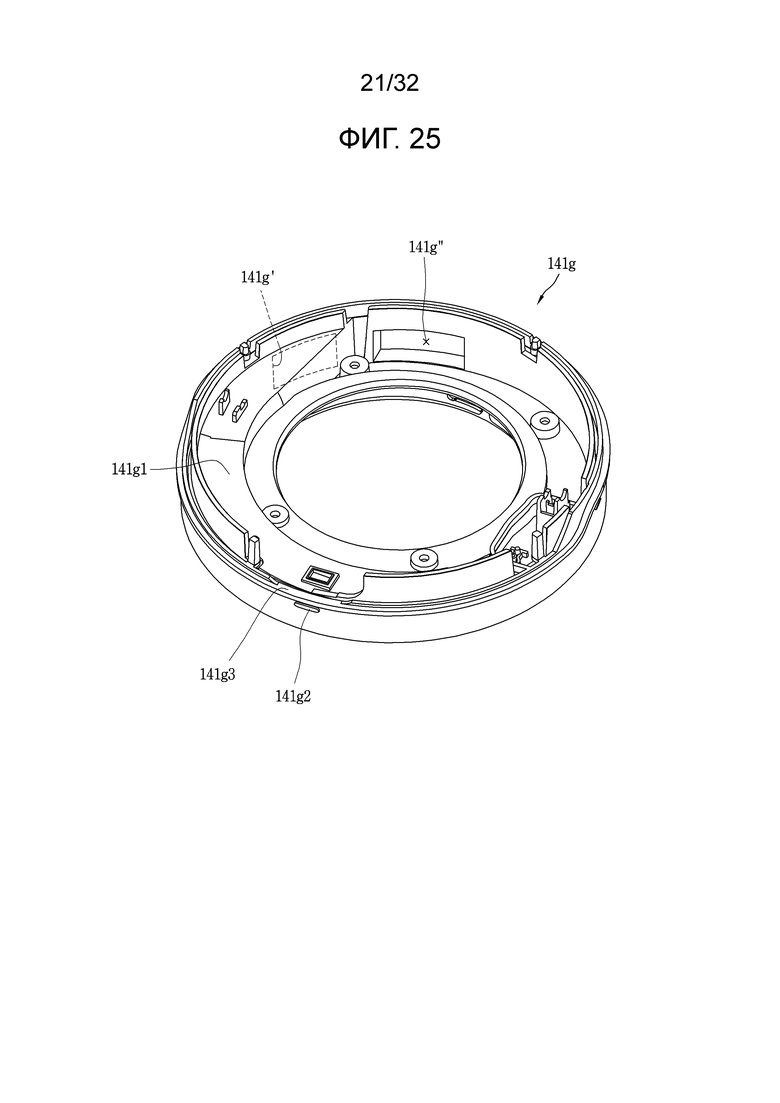
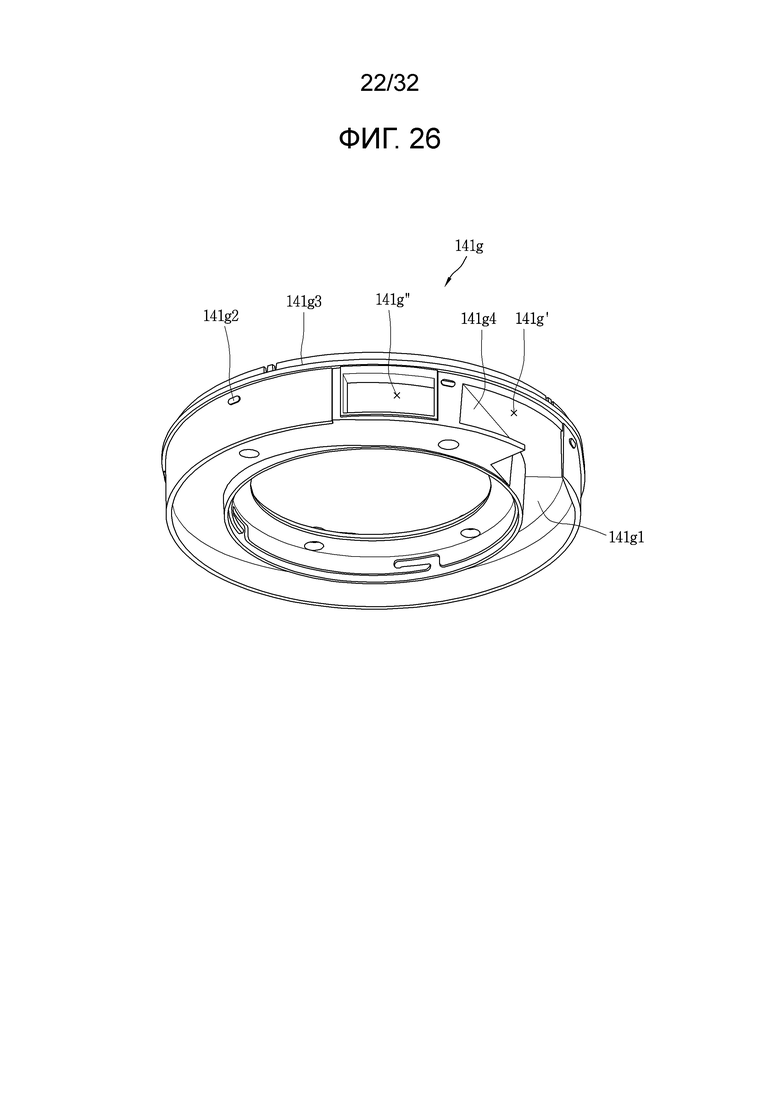
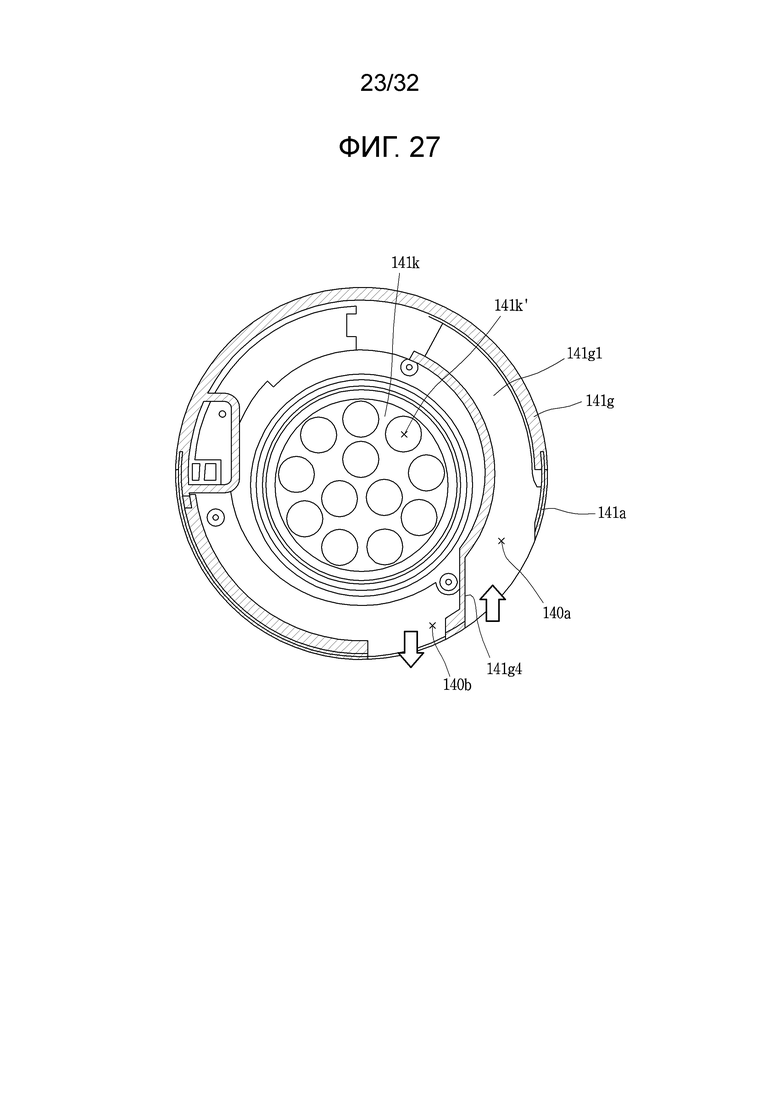
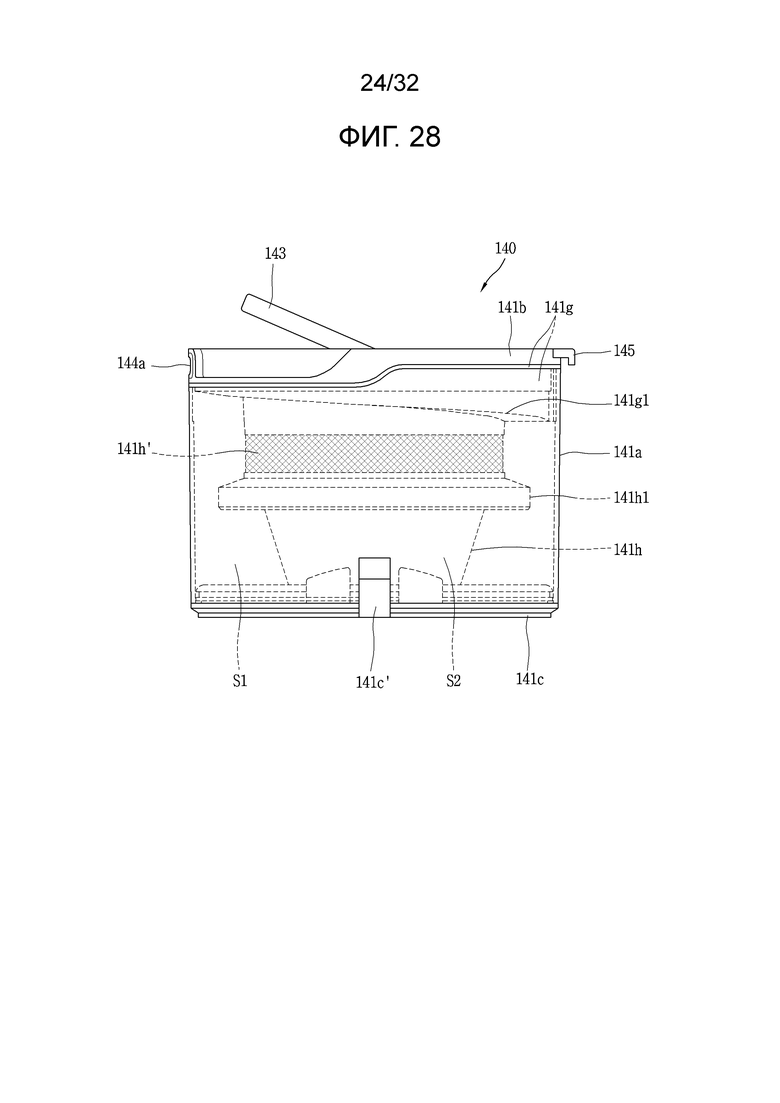
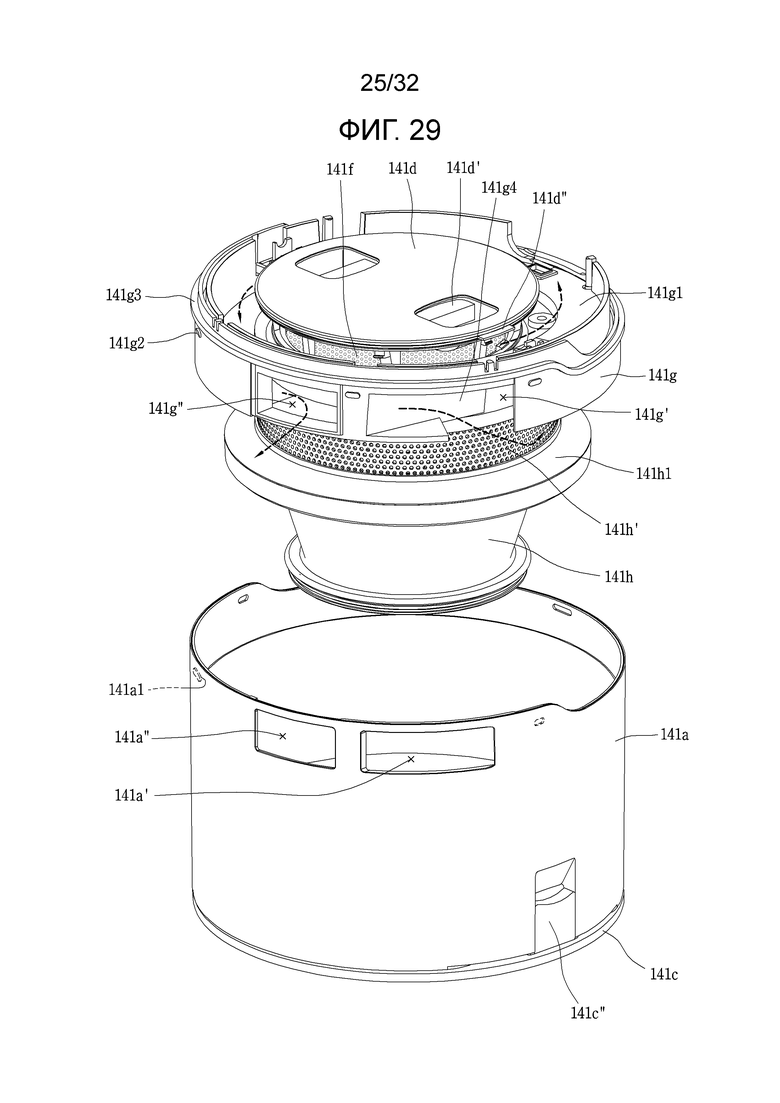
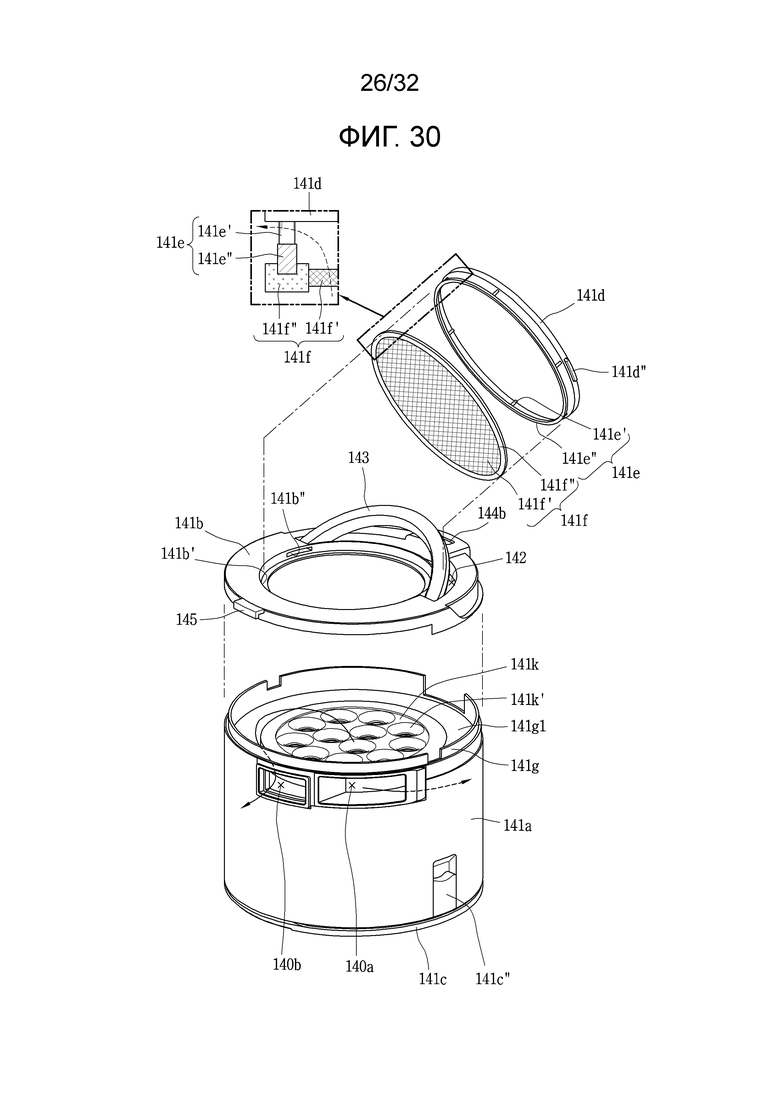
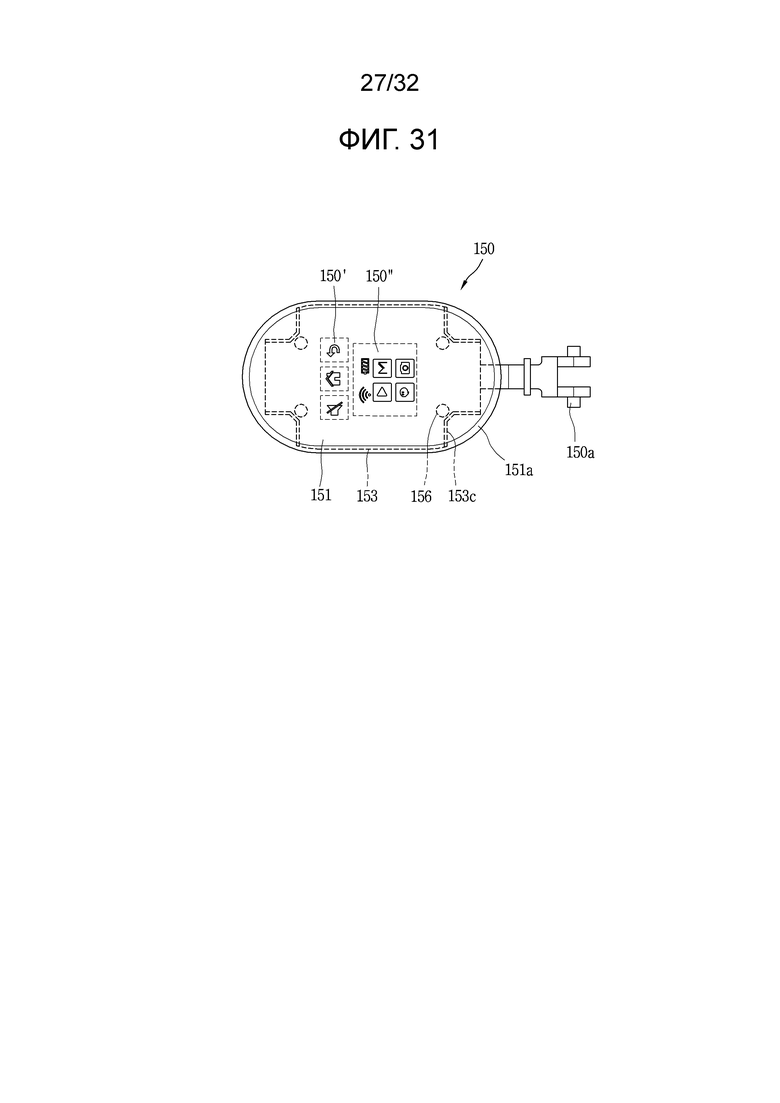
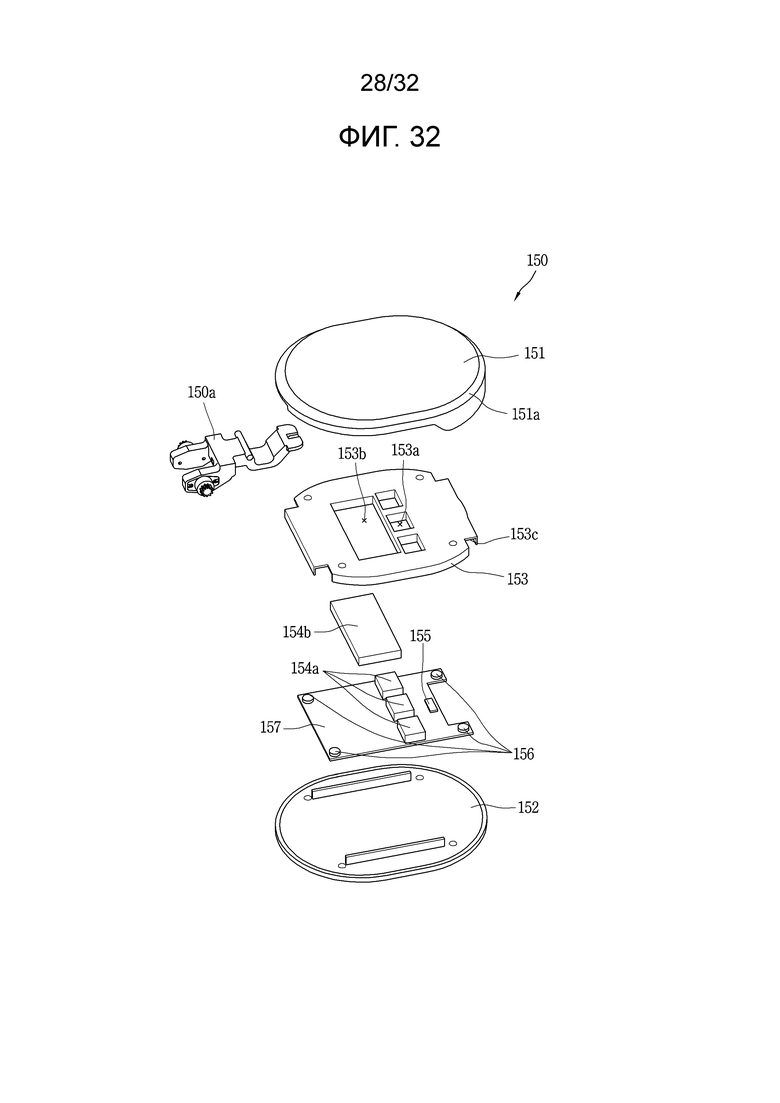
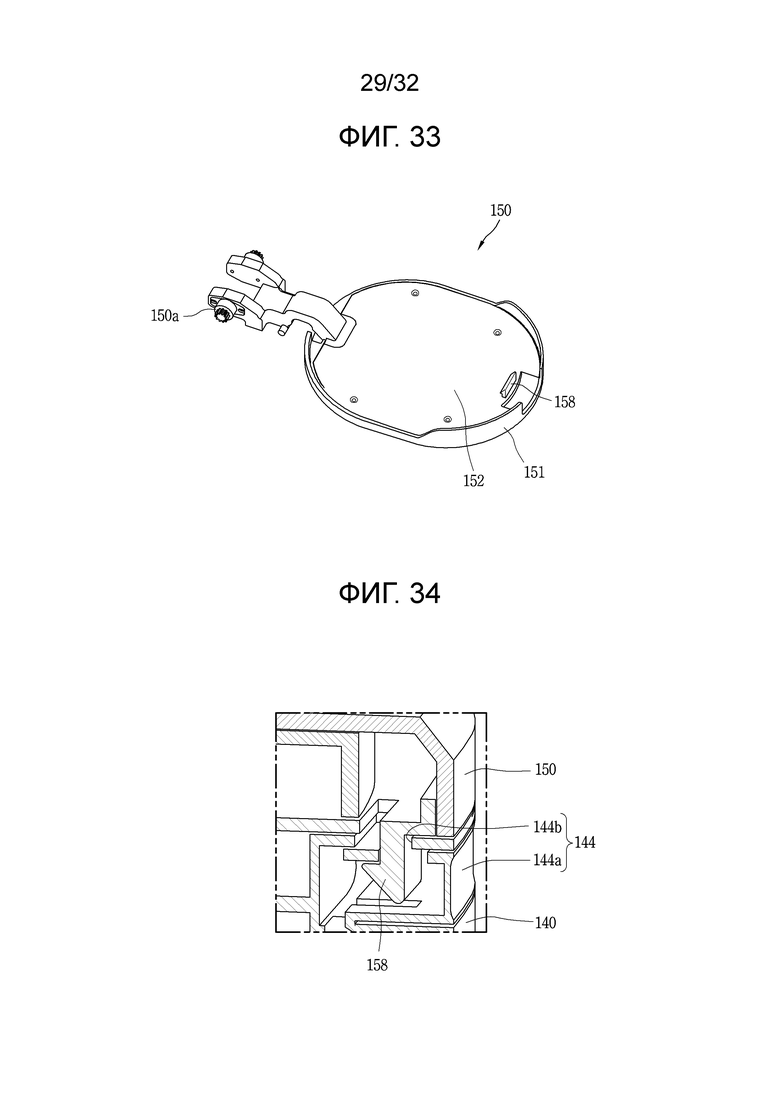
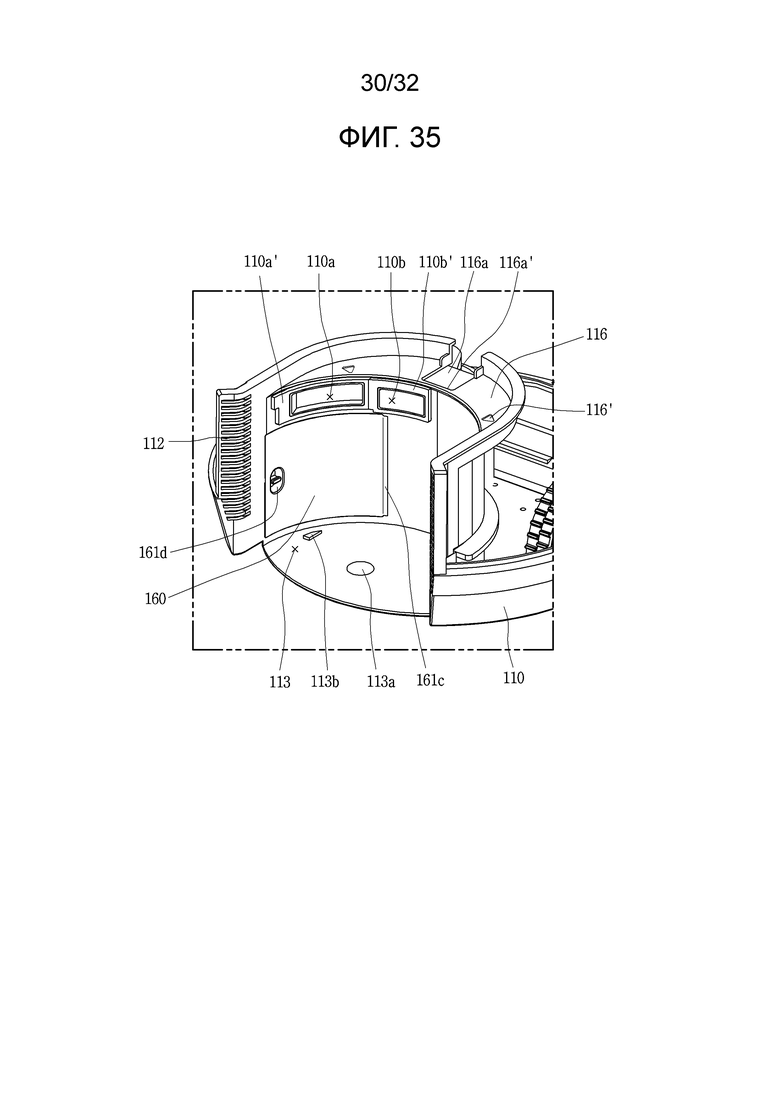
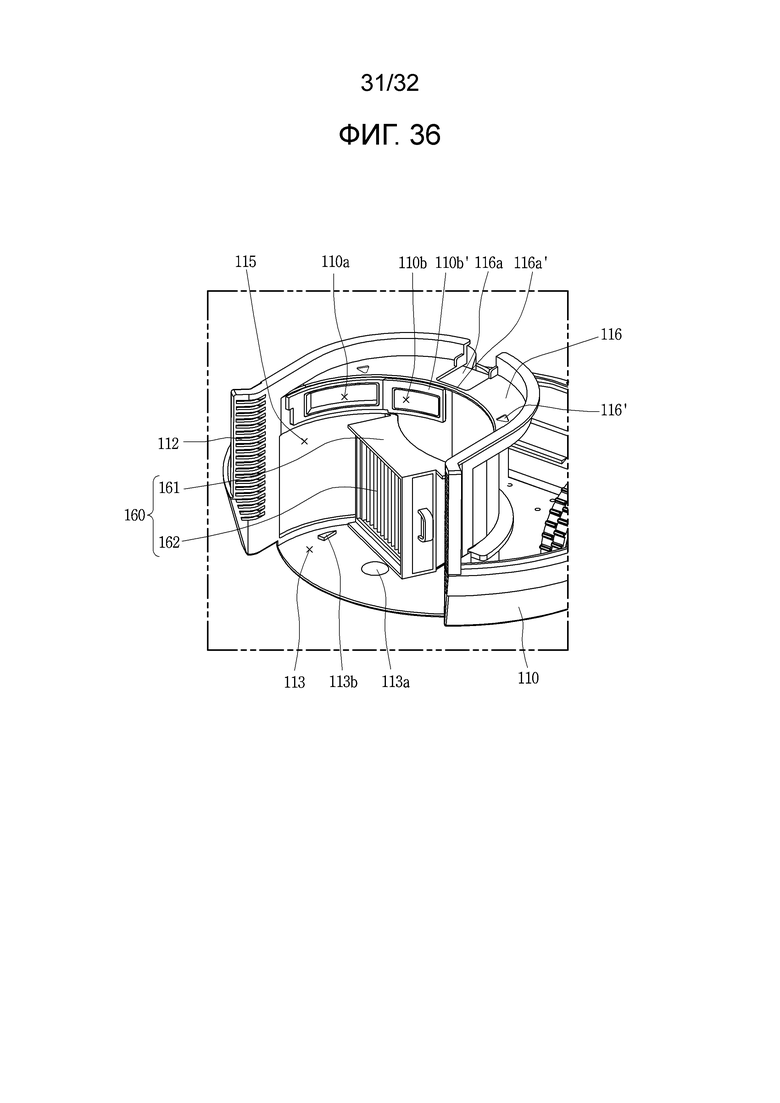
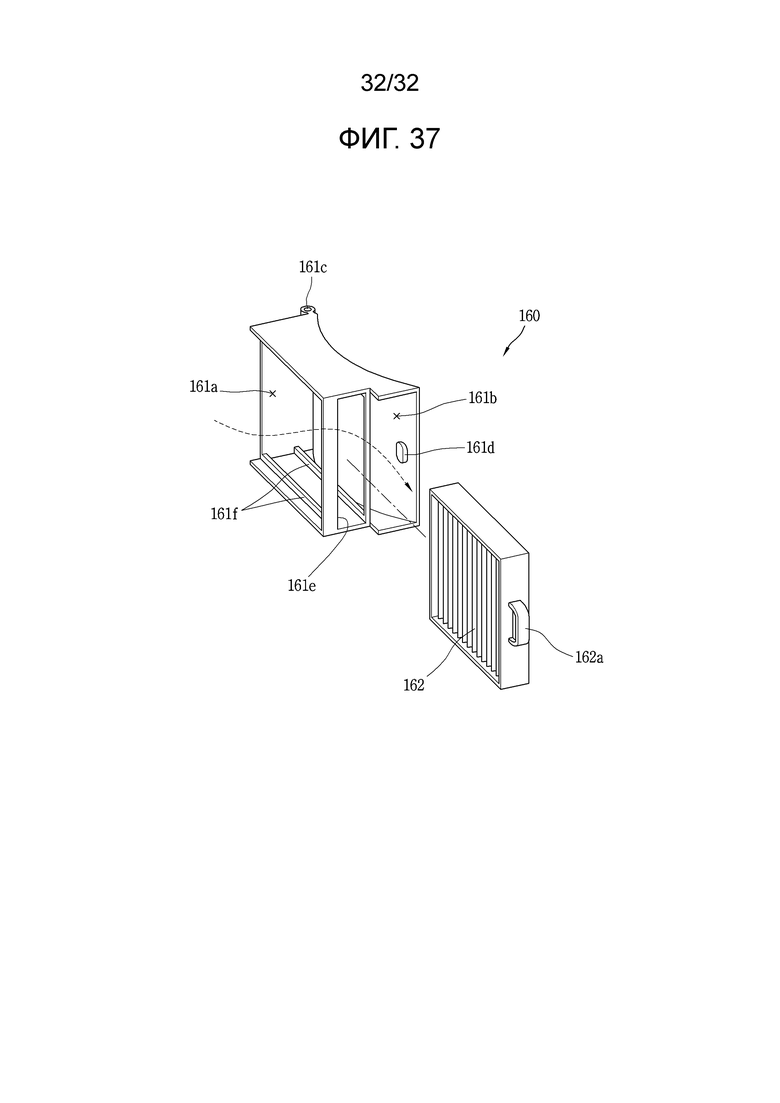
Описан робот-пылесос, содержащий корпус пылесоса, включающий в себя контроллер, причем корпус пылесоса имеет участок для размещения пылесборника, образованный в нем, узел колес, установленный на корпусе пылесоса, узел колес, приведение в движение которого управляется контроллером, всасывающий узел, установленный на корпусе пылесоса, для всасывания воздуха, содержащего пыль, пылесборник, соединенный с возможностью съема с участком для размещения пылесборника, причем пылесборник фильтрует и собирает пыль из всасываемого воздуха, и крышку пылесборника, включающую в себя шарнир, соединенный с возможностью поворота с корпусом пылесоса, причем крышка пылесборника соединена с возможностью съема с пылесборником для закрытия верхней поверхности пылесборника. 2 н. и 13 з.п. ф-лы, 37 ил.
1. Робот-пылесос, содержащий
корпус пылесоса, включающий в себя контроллер, причем корпус пылесоса имеет образованную в нем часть для размещения пылесборника;
узел колес, установленный в корпусе пылесоса, причем узел колес имеет возможность управления его приведения в движение посредством контроллера;
всасывающий узел, установленный в корпусе пылесоса, для всасывания воздуха, содержащего пыль;
пылесборник, соединенный с возможностью отсоединения с частью для размещения пылесборника, причем пылесборник выполнен с возможностью фильтрации и сбора пыли из всасываемого воздуха; и
крышку пылесборника, включающую в себя шарнир, соединенный с возможностью поворота с корпусом пылесоса, причем крышка пылесборника соединена с возможностью отсоединения с пылесборником для закрытия верхней поверхности пылесборника,
при этом имеется утопленный участок, образованный по наружной периферии части для размещения пылесборника в корпусе пылесоса, и
на утопленном участке образована канавка для размещения, вдавленная глубже утопленного участка,
причём имеется запирающий крючок, блокируемый на уступе канавки для размещения при размещении пылесборника на части для размещения пылесборника для выступания пылесборника от наружной периферии пылесборника,
причём крышка пылесборника включает в себя крючок, выполненный с возможностью закрепления на блокирующем узле пылесборника.
2. Робот-пылесос по п.1, в котором пылесборник блокирован от отсоединения от части для размещения пылесборника в положении, в котором крышка пылесборника соединена с пылесборником.
3. Робот-пылесос по п.1, в котором имеется установочный выступ для выступания от нижней поверхности части для размещения пылесборника,
причем на нижней поверхности пылесборника образована установочная канавка, соответствующая установочному выступу.
4. Робот-пылесос по п.3, в котором часть крышки пылесборника размещена на утопленном участке в положении, в котором крышка пылесборника соединена с пылесборником.
5. Робот-пылесос по п.4, в котором на верхней части пылесборника образована метка совмещения,
причем на утопленном участке образована направляющая метка, соответствующая метке совмещения.
6. Робот-пылесос по п.1, в котором шарнир размещен в канавке для размещения в положении, в котором крышка пылесборника соединена с пылесборником.
7. Робот-пылесос по п.1, в котором, в положении, в котором крышка пылесборника соединена с пылесборником, крышка пылесборника расположена для закрытия запирающего крючка.
8. Робот-пылесос по п.1, в котором блокирующий узел выходит на заднюю сторону корпуса пылесоса.
9. Робот-пылесос по п.1, в котором пылесборник включает в себя
часть для размещения ручки, образованная на верхней поверхности;
ручку, шарнирно соединенную с частью для размещения ручки для ее поворота, причем ручка размещена на части для размещения ручки; и
упругий элемент, упруго оказывающий давление на ручку, так что ручка выступает с наклоном относительно верхней поверхности.
10. Робот-пылесос по п.9, в котором, в положении, в котором крышка пылесборника соединена с пылесборником, ручка прижата крышкой пылесборника для размещения на части для размещения ручки.
11. Робот-пылесос по п.1, в котором, при разъединении соединения между крышкой пылесборника и пылесборником, крышка пылесборника наклонена вверх относительно пылесборника.
12. Робот-пылесос по п.11, в котором, при наклоне крышки пылесборника вверх относительно пылесборника, приведение в движение узла колес блокировано.
13. Робот-пылесос, содержащий
корпус пылесоса, включающий в себя часть для размещения пылесборника, открытую назад и вверх;
пылесборник, установленный с возможностью отсоединения в части для размещения пылесборника через открытый вверх участок, причем пылесборник выполнен с возможностью фильтрации и сбора пыли из всасываемого воздуха; и
крышку пылесборника, включающую в себя шарнир, соединенный с возможностью поворота с корпусом пылесоса, причем крышка пылесборника соединена с возможностью отсоединения с пылесборником для закрытия верхней поверхности пылесборника,
причём утопленный участок образован по наружной периферии части для размещения пылесборника в корпусе пылесоса, и
на утопленном участке образована канавка для размещения, вдавленная глубже утопленного участка,
причём имеется запирающий крючок, блокируемый на уступе канавки для размещения при размещении пылесборника на части для размещения пылесборника для выступания пылесборника от наружной периферии пылесборника, и
причём пылесборник блокирован от перемещения назад в положении, в котором пылесборник установлен на части для размещения пылесборника,
причём крышка пылесборника включает в себя крючок, выполненный с возможностью закрепления на блокирующем узле пылесборника, и причём пылесборник блокирован от перемещения вверх в положении, в котором крышка пылесборника закреплена на пылесборнике.
14. Робот-пылесос по п.13, в котором установочный выступ образован для выступания от нижней поверхности участи для размещения пылесборника,
причем на нижней поверхности пылесборника образована установочная канавка, соответствующая установочному выступу.
15. Робот-пылесос по п.13, в котором блокирующий узел выходит на заднюю сторону корпуса пылесоса.
| KR20150008910 A, 23.01.2015 | |||
| KR 101026065 B1, 04.04.2011 | |||
| СПОСОБ ПОЛУЧЕНИЯ ЛИГАТУРНОГО МАТЕРИАЛА ДЛЯ КОМПЛЕКСНОГО МОДИФИЦИРОВАНИЯ СТРУКТУРЫ СЛИТКОВ ИЗ ЛЕГКИХ СПЛАВОВ | 2011 |
|
RU2455380C1 |

