ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к способу обработки изображений, к системе обработки изображений, к компьютерному программному элементу и к машиночитаемому носителю.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Существует целый ряд медицинских вмешательств, которые проводятся под контролем рентгеноскопии или ангиографии. Иначе говоря, рентгеновские изображения в режиме реального времени получаются для изображения внутренних органов пациента вместе с медицинскими инструментами или устройствами, введенными в пациента с целью проведения вмешательства.
Например, для того чтобы препятствовать росту раковой ткани или АВМ (артериовенозная мальформация), питающие ее артерии могут быть преднамеренно эмболизированы для прекращения кровоснабжения (AVM) и/или остановки питания раковой опухоли или ее роста (в числе которых транскатетерная артериальная химиоэмболизация (TACE)). Такой тип вмешательства, называемый медицинской эмболизацией, может осуществляться путем введения эмболизирующего вещества в требуемом месте (обследуемом участке (ROI)) в тело человека с помощью катетерной трубки. Эмболизирующее вещество представляет собой, по существу, некоторое количество жидкости или клеящего вещества, включающего в себя небольшие шарики, взвешенные в жидкости-носителе, которые вызывают окклюзию в пораженном месте. Во время таких вмешательств эмболизации преимущественным является то, что блокируются только целевые питающие артерии, но здоровые сосуды не блокируются. В настоящее время положение эмбола контролируется путем получения одного или более рентгеновских проекционных изображений. По причине радиационной непрозрачности эмбола и/или жидкости-носителя, проекционные "следы" различимы в упомянутых рентгеновских изображениях, обеспечивая тем самым информацию радиологу-интервенционисту о местонахождении эмболов.
Другим примером вмешательства, которое опирается на поддержку с использованием изображения, является транскатетерная имплантация аортального клапана (TAVI). Для оценки результата процедуры TAVI, рутинно выполняется визуальная оценка регургитации клапанов с использованием ангиографии. Выполняется введение контрастного вещества. Затем интервенционист визуально проверяет кадры ангиограммы, чтобы определить, имеется ли обратный ток контрастного вещества в левый желудочек, чтобы таким образом определить степень тяжести регургитации (на основе значения контрастности в желудочке, части желудочка, заполненной контрастом и так далее).
В приведенных выше двух примерах вмешательств, а также в других, качество изображения часто ухудшается из-за плохого контраста в одном или более подвижных слоях, просматриваемых на сложном с мешающими элементами фоне (позвоночник, ребра, медицинские устройства и так далее). В попытке улучшить ситуацию, для достижения лучшего результата, иногда используется цифровая субтракционная ангиография (DSA). В традиционной DSA, изображение маски вычитается из контрастного изображения (например, ангиографический или рентгеновский кадр, который фиксирует эмболу и так далее). Тем не менее, из-за сложных схем движения во время вмешательства, вычитаемые артефакты могут быть введены DSA, что снова ухудшает качество изображения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
По этой причине в данной области техники может возникнуть необходимость в альтернативных способах обработки изображений и/или в соответствующих устройствах, которые устраняют, по меньшей мере, некоторые недостатки, отмеченные выше.
Задача настоящего изобретения решается с помощью предмета изобретения в независимых пунктах формулы изобретения, где дополнительные варианты осуществления изобретения включаются в зависимые пункты формулы изобретения. Следует отметить, что следующие описанные аспекты изобретения в равной степени относятся к способу обработки изображений, системе обработки изображений, к компьютерному программному элементу и к машиночитаемому носителю.
Согласно первому аспекту изобретения, предлагается система обработки изображений, включающая в себя:
входной порт, сконфигурированный для получения, по меньшей мере, двух проекционных изображений, включающий в себя, по меньшей мере, одно изображение маски и, по меньшей мере, одно контрастное изображение, по меньшей мере, части образца с объектом на нем, изображение маски и контрастное изображение, полученное в различное время и каждое из которых представляет собой обследуемый участок, ROI, при различных контрастах;
идентификатор опознавательной точки, сконфигурированный для идентификации, по меньшей мере, одной опознавательной точки, упомянутого объекта на контрастном изображении и, по меньшей мере, одно изображение маски;
блок оценки движения, сконфигурированный для оценки движения объекта в соответствии с движением идентифицированной, по меньшей мере, одной опознавательной точки, по меньшей мере, на контрастном изображении и, по меньшей мере, одного изображения маски, в котором упомянутое движение относится к движению ROI;
блок компенсации движения, сконфигурированный для регистрации, по меньшей мере, одного изображения маски, по меньшей мере, с одним контрастным изображением, только на основе оцененного движения опознавательной точки;
блок вычитания, сконфигурированный для вычитания, по меньшей мере, одного зарегистрированного изображения маски, по меньшей мере, из одного контрастного изображения для получения разностного изображения ROI и
выходной порт, сконфигурированный для вывода разностного изображения.
Согласно одному варианту осуществления изобретения система обработки изображений включает в себя блок визуализации, сконфигурированный для отображения на устройстве отображения, по меньшей мере, части упомянутого разностного изображения, которое соответствует ROI.
Иначе говоря, предлагаемый способ DSA реализует компенсирующее движение ROI, которое концентрируется на движении ROI. Более конкретно, движение ROI получается с помощью отслеживания опознавательной точки или внутри, или снаружи части изображения, которое представляет ROI и учитывается только данное движение опознавательной точки для учета с целью компенсации движения ROI. Иными словами, компенсация движения основывается только на движении опознавательной точки. Другие движения окружающих объектов изображения игнорируются. Хотя объекты подвергаются различным движениям, отличным от движения опознавательной точки, иногда могут, в силу обстоятельств, выглядеть размытыми, что было обнаружено Заявителем как фактическое преимущество, поскольку это размытие позволяет оператору легче мысленно сосредоточиться на высококонтрастной информации изображения в ROI, что намного лучше для глаза в противоположность (возможно) размытому фону. Это особенно выгодно, если предлагаемый способ используется для визуализации изображений в реальном времени для поддержки необходимых вмешательств, когда оператор должен преодолеть сложную анатомию и схемы движения.
Согласно одному варианту осуществления изобретения идентификация опознавательной точки основывается на вспомогательных данных изображения, зарегистрированных, по меньшей мере, с одним из проекционных изображений.
Согласно одному варианту осуществления изобретения опознавательная точка является объектом первого движения, в котором операция регистрации блока компенсации движения включает в себя выбор изображения маски таким образом, чтобы положение опознавательной точки в соответствии с выбранным изображением маски соответствовало положению опознавательной точки, по меньшей мере, одного контрастного изображения.
Согласно одному варианту осуществления изобретения система обработки изображений включает в себя входной порт определения опознавательной точки и блок идентификации выполнен с возможностью идентифицировать опознавательную точку в ответ на получение на упомянутом входном порту определения опознавательной точки или нескольких опознавательных точек, причем определение представляет собой выбор из изображения маски или из контрастного изображения.
Согласно одному варианту осуществления изобретения блок визуализации конфигурируется для отображения на устройстве отображения, по меньшей мере, части разностного изображения вместе с изображением маски и/или контрастного изображения. В одном варианте осуществления изобретения только в виде части разностного изображения отображается, что данная часть является "ориентированной на ROI".
Согласно одному варианту осуществления изобретения блок визуализации конфигурируется для отображения, по меньшей мере, части зарегистрированных вспомогательных данных изображения.
Согласно одному варианту осуществления изобретения система конфигурируется для обработки, по меньшей мере, двух проекционных изображений в отношении второй опознавательной точки и/или второго ROI для получения второго разностного изображения, в котором блок визуализации конфигурируется для отображения, по меньшей мере, части упомянутого второго разностного изображения вместо или вместе с разностным изображением.
Согласно одному варианту осуществления изобретения блок визуализации конфигурируется для отображения в изображении маски накладывающегося графического элемента, указывающего местоположение ROI и/или второго ROI.
Согласно одному варианту осуществления изобретения опознавательная точка является объектом для второго движения, в котором блок компенсации движения конфигурируется для:
выбора двух дополнительных изображений маски таким образом, что i) позиции опознавательной точки в зависимости от первого движения, согласно двум дополнительным проекционным изображениям маски, являющимися по сути одинаковыми и ii) разницы позиций в отношении второго движения, являющейся по сути такой же, как и для опознавательной точки, согласно изображению маски и согласно, по меньшей мере, одному контрастному изображению.
Согласно одному варианту осуществления изобретения блок вычитания конфигурируется для:
вычитания упомянутых двух дополнительных изображений маски с целью получения разностного изображения маски после компенсации движения в отношении первого или второго движения, вычитания разностного изображения маски из разностного изображения для получения каскадного разностного изображения.
Согласно одному варианту осуществления изобретения блок визуализации выполнен с возможностью отображения на экране, по меньшей мере, части упомянутого каскадного разностного изображения.
Согласно одному варианту осуществления изобретения опознавательная точка является или относится к проекционному следу собственного объекта или постороннего объекта, в частности, имплантированного объекта такого, как искусственный сердечный клапан или эмбол. Объект постоянно находится в образце в соответствующее время исследований проекционного изображения маски и проекционного изображения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Примерные варианты осуществления изобретения теперь будут описываться со ссылкой на следующие чертежи, на которых:
На ФИГ. 1 показано устройство формирования изображения;
На ФИГ. 2 показана блок-схема способа обработки изображений согласно первому варианту осуществления изобретения;
На ФИГ. 3 показана блок-схем способа обработки изображений согласно второму варианту осуществления изобретения;
На ФИГ. 4 показан графический дисплей согласно одному варианту осуществления изобретения;
На ФИГ. 5 показаны иллюстративные изображения, полученные согласно способу обработки изображений, как предложено в настоящем документе.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
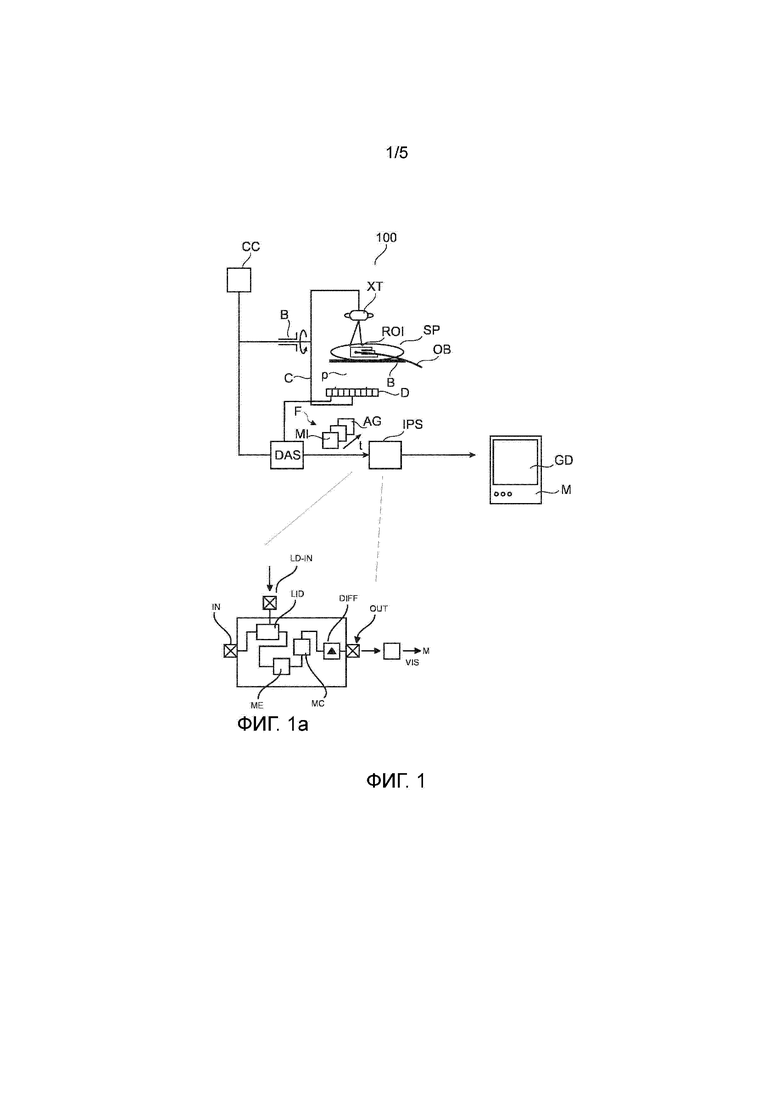
Со ссылкой на ФИГ. 1 показаны основные элементы устройства рентгеноскопического или ангиографического формирования изображения, которое может использоваться для поддержки интервенционных вмешательств.
Пациент SP может страдать от ненормальной работы сердечного клапана. Во время интервенционного вмешательства TAVI, медицинский персонал вводит проволочный проводник катетера в бедренную артерию пациента SP, а затем направляет питающий катетер OB к пораженному клапану аорты ROI, для восстановления или замены. По мере того, как проволочный проводник катетера продвигается по коронарным сосудам пациента P, серии последовательных рентгеноскопических изображений F получают с помощью рентгеновского формирователя 100 изображения. Еще одним примером является процедура эмболизации, когда катетер OB для введения эмболизирующего вещества направляется к AVM или к раковой (как в TACE) локализации.
Во время вмешательства пациент SP располагается на кушетке B между рентгеновской трубкой XT рентгеновского формирователя 100 изображения и детектором D. Рентгеновская трубка XT и детектор D прикрепляются к жесткой раме C, установленной с возможностью вращения на подшипнике B. Управление рентгеноскопическим изображением осуществляется с компьютерной консоли CC. Интервенционный радиолог может управлять через упомянутую консоль CC получением изображения и может "фотографировать" ряд отдельных рентгеновских кадров ("рентгенограмм") F с помощью приведения в действие ручки управления или педали. Согласно одному варианту осуществления изобретения формирователь 100 изображения имеет тип C-рамы, но другие системы также возможны.
Во время получения изображения рентгеновское излучение исходит от рентгеновской трубки XT, проходит сквозь ROI, испытывает ослабление из-за взаимодействия с тканью в нем и, ослабленный таким образом пучок p затем, попадает на поверхность детектора D в одну из множества ячеек детектора, составляющих детектор D. Каждая ячейка, в которую попал пучок, реагирует путем выдачи соответствующего электрического сигнала. Сбор упомянутых сигналов затем переводится в соответствующее цифровое значение, представляющее упомянутое ослабление. Плотность ткани, составляющей ROI, определяет уровень ослабления, при высокой плотности ткани вызывая более сильное ослабление, чем при меньшей плотности тканей. Таким образом зарегистрированные цифровые значения для каждого рентгеновского пучка p, затем объединяются в массив цифровых значений, образующих кадр рентгенограммы для данного времени исследования и направления проекции. Иначе говоря, каждая рентгенограмма является цифровым изображением проекционного вида вдоль направления проекции и упомянутого направления определяется путем поворота C-рамы в данное время исследования или моментально. Серии рентгенограмм F, затем подвергаются цифровой обработке блоком сбора данных DAS и затем направляются в блок обработки изображений IPS, цель и действие которого более подробно будут объяснены ниже.
В одном варианте осуществления изобретения детектор D является компонентом усилителя изображения, который непосредственно проецирует изображение на экран M для наблюдения в реальном времени.
На рентгеноскопическом изображении F, как правило, имеются только сильно ослабляющие объекты, следы которых заметны. В частности, только проволочный проводник катетера или катетер OB, сделанные из материала с высокой непрозрачностью, могут быть видимыми в качестве вида проекционного следа или "тени" на каждой рентгенограмме F. Поскольку поток рентгеноскопических изображений F получаются при достаточной частоте кадров (около 15 изображений в секунду для TAVI или 2 изображения в секунду для TACE), так что можно контролировать продвижение проволочного проводника катетера с катетером OB в теле пациента SP.
В ряде вмешательств, для повышения контрастности мягких тканей или для изображения характера динамики жидкости, как при оценке клапанных регургитаций, пациенту SP вводится контрастное вещество ("краситель") с высокой непрозрачностью. Некоторое количество контрастного вещества ("болюс") затем перемещается вместе с кровотоком по сосудистой сети и, в конечном счете, проходит ROI. Иначе говоря, краситель или контрастное вещество обеспечивает временную непрозрачность для невидимой в иных случаях сосудистой структуры ROI и сосудистое дерево вырисовывается, как похожее на след паука в каждой из ангиограмм AG. Рентгеновские кадры ROI получаются в то время, как болюс находится на пути к ROI и в какой-то момент, когда болюс проходит через ROI, получают кадры рентгенограмм с высоким контрастом. Данные специально рассчитанные по времени рентгенограммы являются ангиограммами. Иначе говоря, поток рентгеновских кадров F включает в себя два типа кадров: те, которые были получены без присутствия контрастного вещества в ROI (принимается по умолчанию, но в этом контексте мы будем ссылаться на упомянутые кадры "без-красителя", как "изображения маски" MI) и кадры, полученные в то время, как контрастное веществ присутствует в ROI. Они являются кадрами ангиограммы или "контрастными изображениями" AG. Вместо контрастного вещества может быть эмболизирующее вещество и вышеуказанные замечания по расчету времени маски и контрастных изображений применяются соответственно. Используется ли контрастное вещество, или эмболизирующее вещество, или любое другое вещество, применяется один и тот же термин "контрастное изображение".
Система визуализации способна поддерживать не только направление соответствующего медицинского инструмента OB (такого как катетер, клапан для имплантации и так далее) к ROI, но также текущую интервенционную задачу на ROI такую, как эмболизация, восстановление сердечного клапана или любые другие процедуры диагностики или обследования. Например, в эмболизационом вмешательстве задача состоит в том, чтобы выделить некоторый объем эмболизирующего вещества (в дальнейшем в настоящем документе называемого "каплей клея", "эмболом" или просто "каплей") через катетерную систему в ROI. Упомянутый ROI является, например, шунтом сосуда, который необходимо окклюзировать, потому что пациенту должна быть проведена AVM, артериовенозная фистула (AVF) или терапия гемангиомы. Примерами жидких эмболизирующих материалов являются Onyx® ( клее-подобное вещество), этанол или n-бутил цианокрилат (NBCA). Введение эмбола начинается в момент времени t0 путем высвобождения некоторого объема эмболизирующего вещества через открытый наконечник, упомянутого катетера вблизи ROI. Эмбол затем циркулирует в кровеносном русле до тех пор, пока он не расположиться в целевом положении (обычно это шунт, соединяющий артериальную и венозную системы), окклюзируя, тем самым, кровеносный сосуд.
Другие интервенционные вмешательства включают в себя операции по восстановлению сердечнососудистой системы, например, оценку регургитаций в собственных или искусственных сердечных клапанах. В данном случае ROI можно считать местом имплантированного искусственного клапана.
Для еще большего увеличения контраста изображения в ангиограммах AG и для удаления участия в ослаблении от объектов заднего и переднего плана и других помех, используется DSA, где, как правило, изображение маски MI (рентгенограмма, где в ROI отсутствует или присутствует только незначительное количество контрастного вещества) вычитают из текущей ангиограммы (также упоминаемой в настоящем документе как контрастное изображение), чтобы создать (пиксельное) разностное изображение DF1. К сожалению, часто возникает движение во время получения рентгенограмм/ангиограмм, вызванное, например, движением пациента, таким как физиологическая активность (дыхательная и/или сердечная). Это приводит к тому, что объекты изображения (например, те, которые представляют ROI и соответствующие проекционные следы катетера или другого инструмента OB и/или органов, например, ребер и так далее) испытывают явное движение по кадрам. Простое вычитание кадров друг из друга, когда происходит движение, может привести к внесению артефактов.
Для лучшей поддержки изображения таких или подобных вмешательств, особенно во время движений, система дополнительно включает в себя процессор изображений, сконфигурированный для работы с потоком рентгеноскопических изображений, как представлено рентгеновским формирователем изображения. На ФИГ. 1A показаны детали системы обработки изображений IPS, как предложено в настоящем документе.
IPS включает в себя входные и выходные порты IN, OUT. Имеется модуль идентификатора опознавательной точки LID, блок оценки движения ME и блок компенсации движения MC. Данные модули обрабатывают различные кадры потока рентгеноскопических изображений способом, который будет описан более подробно ниже со ссылкой на ФИГ. 2 и 3, и передают обработанные, таким образом, кадры в модуль вычитания DIF для получения разностного изображения DIF1, чтобы, таким образом, выполнить DSA. Разностное изображение DIF1 затем выводится на выходной порт OUT и затем может быть сохранено для дальнейшей обработки или может быть передано на блок визуализации VIS, который взаимодействует с видеооборудованием системы визуализации 100 для формирования графического изображения GD в блоке отображения M (таком как монитор или экран), где затем отображается разностное изображение DIF или его части.
Сокращенно, предлагаемая система процессора изображений действует как усилитель контрастности так, чтобы увеличить контрастность изображения только в части изображения, которая представляет ROI. Процессор изображений IPS, предлагаемый в настоящем документе, по существу, действует как модуль компенсации локального движения DSA. Данное изобретение предлагает оптимизированное вычитание с сосредоточением внимания на ROI только вокруг определенной опознавательной точки на изображении. Опознавательная точка также может находиться вне ROI до тех пор, пока существует известная детерминированная связь между движением опознавательной точки и ROI. Опознавательной точкой может быть либо инородный предмет, такой как наконечник катетера OB, или любой другое введенное/имплантированное устройство, такое как сердечный клапан, или частично эмболизированная ткань, или сам эмбол. Выделенный алгоритм обрабатывает изображения и имеет возможность сопровождать опознавательную точку в последующих изображениях. Чем больше структурная резкость опознавательной точки, тем легче и надежнее ее обнаружение по всем кадрам. Затем IPS выполняет вычитание, которое корректно компенсирует движение только для локального обследуемого участка (в целом, но не всегда области вокруг опознавательной точки). Остальная часть изображения может, таким образом, иметь значительные артефакты вычитания. Тем не менее, артефакты на участках изображения, которые не представляют ROI, в ряде вмешательств не имеют значения, поскольку информация в данных участках изображения имеет гораздо меньшее значение. В частности, процессор изображений IPS работает, для компенсации движений в одном или более слоях движения, испытываемых рассматриваемой опознавательной точкой. "Слои движения" относятся к явлению в проекционных изображениях, где некоторые объекты изображения перемещаются по разным кадрам, тогда как объекты изображения не перемещаются или перемещаются по-другому так, как, например, фоновые объекты изображения. Данные объекты могут, вследствие этого, можно сказать, что располагаются в различных слоях движения. Хотя представленный способ способен обрабатывать множество опознавательных точек на обследуемом участке, они обрабатываются раздельно, чтобы производить для каждого свое выделенное движение, компенсирующее разностное изображение DFI.
Работа процессора изображений IPS будет описываться более подробно ниже со ссылкой на блок-схемы на ФИГ. 2 и ФИГ. 3, каждая из которых показывает различные варианты осуществления изобретения.
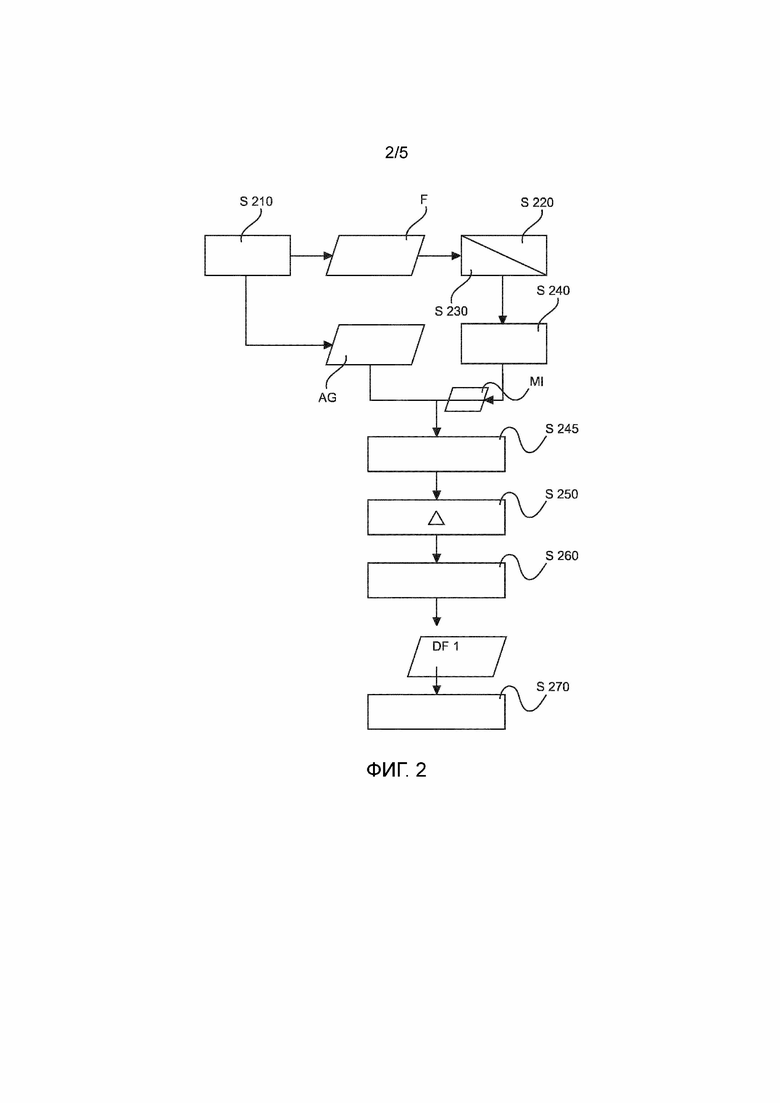
Обратимся сначала к блок-схеме на ФИГ. 2, где работа системы обработки изображений IPS описывается для DSA со скомпенсированным движением в отношении одиночного движения, рассматриваемой опознавательной точки OB. Например, но это только для иллюстративных целей, и ни коим образом не является ограничением, первое движение может быть вызвано сердечной активностью, тогда как второе движение возбуждается или приводится в действие дыхательной активностью, может быть подавлено с использованием протокола удержания дыхания, как предполагается в настоящем документе. На ФИГ. 3 ниже будет описываться другой вариант осуществления изобретения, способный обрабатывать комбинированные движения. Более того, движения, отличающиеся от кардиологических или дыхательных, в частности, не циклические движения, могут рассматриваться в настоящем документе в качестве дополнительных и специально предусмотрены в настоящем документе.
На этапе S210 изображение маски кадра MI и контрастное изображение кадра (ангиографический кадр) AG берутся из потока рентгеноскопических изображений F. Это может быть достигнуто, например, с использованием схемы порогового значения, которая контролирует интенсивности уровня серого в отдельных пикселях в каждом из кадров рентгеноскопического потока. Затем может быть принято решение, будет ли, например, полученный в настоящее время рентгеновский кадр, являться ангиограммой AG.
На данных двух или более кадрах изображения AG, MI анализ движения выполняется на этапах S220 и S230. В частности, на этапе S220 опознавательная точка (например, след или тень изображения) введенного объекта OB обнаруживается или идентифицируется на двух изображениях MI и AG. Примерами для подходящих опознавательных точек являются наконечник катетера (через который, например, вводится эмбол), следы формы и абсорбции эмбола, как таковые, откладываются на обследуемом участке или следы формы имплантированного устройства, например, сердечного клапана для кардиохирургических применений. Тем не менее, собственные объекты такие, как ребра, кальцификации или другие идентифицируемые органы, также считаются подходящими опознавательными точками. Можно также отметить, что опознавательная точка не обязательно может находиться на обследуемом участке, хотя это может быть справедливо для некоторых случаев. Все, что требуется - это детерминированная априорная связь между движением обследуемого участка и движения наблюдаемой опознавательной точки. Иначе говоря, в ряде вариантов осуществления изобретения движение опознавательной точки берется как заменитель движения ROI. Как только движение опознавательной точки обнаружено, связанное движение обследуемого участка может быть, таким образом, вычислено с использованием данной известной динамической связи. Этап идентификации опознавательной точки S220 является, по существу, операцией отслеживания по двум изображениям MI и AG. Если для каждого изображения указаны несколько опознавательных точек, каждая опознавательная точка отслеживается или "сопровождается" по отдельности. Как только опознавательная точка идентифицируется по двум изображениям, управление потоком переходит к этапу S230, на котором движение соответствующих объектов OB оценивается по опознавательным точкам, идентифицированным по двум изображениям.
Затем управление потоком переходит на этап S240, на котором, по существу, выполняется регистрация в отношении оцененного движения. В частности, оцененная регистрация осуществляется только в отношении движения обследуемого участка и/или опознавательной точки. Согласно одному варианту осуществления изобретения никакое другое движение или любая другая часть изображения не учитывается. Данный подход позволяет использовать характеристику компенсации движения, ориентированную на ROI, для предлагаемого процессора изображений IPS. Схема сосредоточения компенсации движения ROI на этапе S240 может включать в себя жесткие или не жесткие схемы регистрации, такие как деформация или другие, которые позволяют регистрировать две опознавательные точки друг на друга по двум изображениям MI, AG. Одно из рассмотренных изображений MI, AG затем модифицируется, например, сдвигается или трансформируется другим способом, чтобы произвести, по существу, выравнивание двух изображений, компенсируя, тем самым, движение в рассматриваемом слое движения согласно движению опознавательной точки. Множество опознавательных точек для одной ROI могут рассматриваться в одном варианте осуществления изобретения для получения не жесткой регистрации. Для не жесткого случая может быть создано преобразование (которое является дескриптором локального движения) для попытки преобразования данного изображения маски и контрастного изображения, составляющих пару друг с другом. Тем не менее, в ряде вариантов осуществления изобретения жесткая регистрация дескриптора движения может быть такой же простой, как один вектор сдвига/перемещения или простой поворот.
В альтернативном варианте осуществления изобретения этап регистрации S240 включает в себя этап выбора, который целевым образом выбирает изображение маски из множества ранее полученных изображений маски так, что фаза движения опознавательной точки (или, если движение не является циклическим, положения опознавательной точки), как записано в нем, соответствует фазе движения опознавательной точки согласно текущему контрастному изображению AG. Например, набор кадров изображения маски может быть получен до достижения контрастным болюсом рассматриваемого обследуемого участка. Таким образом получается "запас" изображений маски, каждой зафиксированной опознавательной точки в другой фазе сердечного цикла. Упомянутые изображения маски записываются на протяжении всего сердечного цикла. На этапе регистрации положение/конфигурация опознавательной точки при более позднем получении контрастного изображения, затем сравнивается с каждым положением опознавательной точки в запасе предварительно записанных изображений маски, чтобы выбрать тот, который лучше всего соответствует текущему положению опознавательной точки согласно контрастному изображению AG. Например, данный выбор может быть получен путем наложения текущего контрастного изображения на каждую из буферизированных масок MI, чтобы установить, где происходит наибольшее перекрытие между опознавательными точками. Например, соответствующие положения следов имплантированного сердечного клапана могут использоваться в данном кардио-контексте. Но данный подход может быть также полезен на примере эмболизации, поскольку известно, что болюс изменяет форму довольно медленно, поскольку он затвердевает, поэтому достаточно высокая частота кадров может позволить отслеживать сердечное, или дыхательное, или любое другое движение, которое стремятся компенсировать.
Иначе говоря, в одном варианте осуществления изобретения последнее (то есть, наиболее актуальное) изображение маски может выбираться из потока рентгенограмм F и затем регистрироваться на текущем контрастном изображении путем преобразования на основе обнаруженного движения опознавательной точки. В другом варианте осуществления изобретения, где регистрация осуществляется по выбору, выбранное изображение маски не обязательно может быть последним, но может быть более старым кадром из потока F, потому что изображение маски выбирается так, что положение опознавательной точки, зафиксированное в нем, по существу, такое же, как положение опознавательной точки на текущем контрастном изображении. Поэтому, возможно, придется вернуться назад на несколько кадров, чтобы найти наиболее подходящую маску. Тем не менее, даже при таком выборе некоторое остаточное несоответствие движение опознавательной точки согласно двум изображениям, может все же оставаться и это может быть исправлено на необязательном этапе S245 путем подходящего алгоритма сдвига пикселей. В одном варианте осуществления изобретения, тем не менее, нет такого необязательного этапа и регистрация полагается исключительно на регистрацию, полученную путем выбора из ранее записанных изображений маски "правильной", то есть той, которая наилучшим образом соответствует положению опознавательной точки положению опознавательной точки согласно текущему контрастному изображению. Необязательный этап S245 может включать в себя вместо или в дополнение к сдвигу пикселей операцию фильтрации, чтобы отфильтровать части опознавательной точки. Например, след опознавательной точки, по меньшей мере, в изображении маски может быть сглажен или целиком удален так, чтобы дополнительно удалять артефакты в разностном изображении DFI. Здесь может быть оценено то, что этап выбора для обеспечения соответствия фазы движения опознавательной точки, записанной в двух изображениях, полностью сделан на информации изображения. Иначе говоря, технологии синхронизации, которым требуется обращаться к внешнему оборудованию такому, как ECG и так далее, могут быть полностью исключены в настоящем документе. Тем не менее, это не означает, что предложенный способ не может использоваться в сочетании с сигналами синхронизации и такая комбинация также предусмотрена в настоящем документе в альтернативном варианте осуществления изобретения.
Два изображения, зарегистрированные таким образом на этапе S240, затем направляются на этап S250, где текущее контрастное изображение вычитается из изображения маски MI для получения разностного изображения DF1.
Затем разностное изображение на этапе S260 выводится и становится доступным для дальнейшей обработки такой, как отображение, которое действует на этапе S270. Различные режимы отображения будут объяснены более подробно ниже со ссылкой на ФИГ. 4.
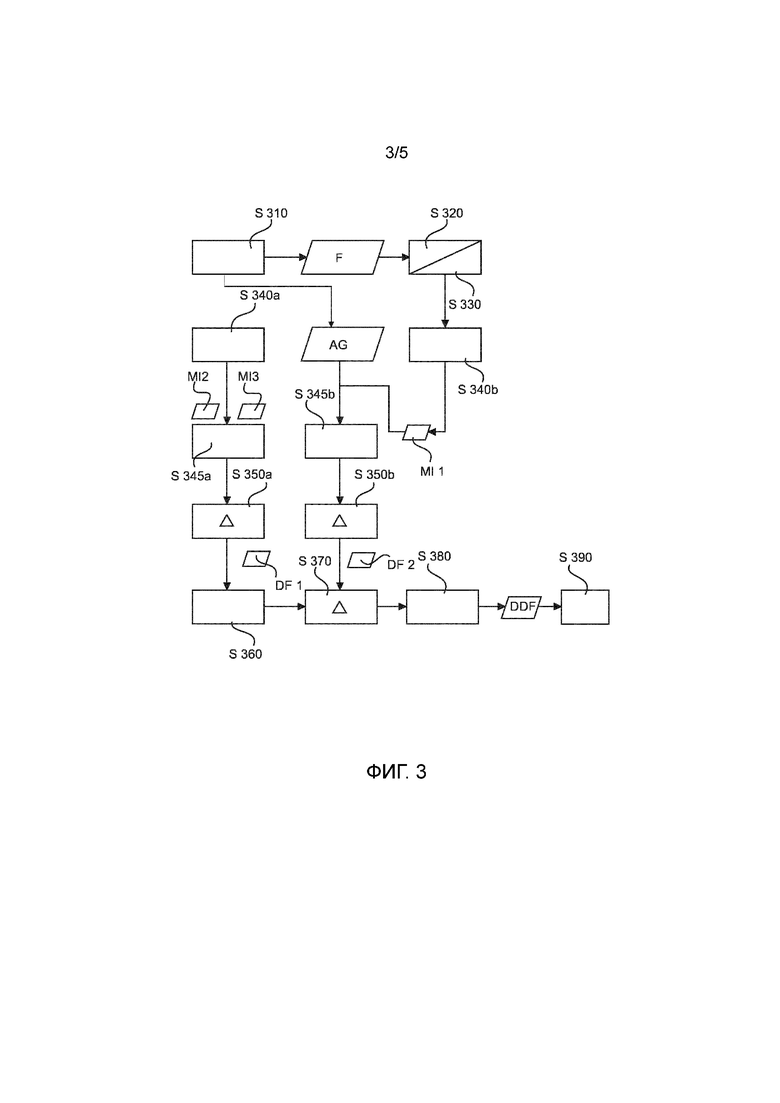
Теперь обратимся к блок-схеме на ФИГ. 3, на которой показывается похожий алгоритм DSA, как тот, который показан на ФИГ. 2, тем не менее, вариант осуществления изобретения на ФИГ. 3 приспособлен для обработки движений, возникающих из комбинации различных движений или циклов, которые действуют на обследуемом участке/опознавательной точке. Компенсация данных комбинированных схем движения достигается с помощью схемы двойного вычитания.
Коротко говоря, в варианте осуществления изобретения, предложенном на ФИГ. 3 для выполнения первого вычитания на этапе S350b, чтобы компенсировать, скажем, дыхательное движение, а также, чтобы выполнить во втором потоке второй этап вычитания S350a, чтобы удалить остаточное движение сердца.
В частности, аналогично способу, показанному на ФИГ. 2 на этапе S210, получают изображение маски MI и контрастное изображение AG. Аналогично вышесказанному на этапах S220 и S230, выполняется анализ движения, где этап S320 и этап S330 соответствуют этапам S220, S230 выше.
На основе проанализированного движения на этапе S340B два изображения регистрируются друг на друга, аналогично вышеописанному этапу S240, в качестве операции выбора или поиска, где принятое изображение маски является таким, которое было выбрано из множества ранее сохраненных (например, буферизированных) изображений маски. Тем не менее, в отличие от этапа регистрации S240 на ФИГ. 2 выше, выбор теперь фокусируется на этапе S340b только на дыхательном движении. Данный подход может быть выполнен, следуя по этапам анализа движения опознавательных точек S320, S330, на которые более заметно влияет дыхательное движение, как, например, движение ребер. Компонент сердечного движения пренебрежимо мал для данных опознавательных точек. Альтернативно, временной анализ может быть проведен таким образом, чтобы идентифицировать через уникальную частотную сигнатуру два цикла движения.
После необязательного этапа фильтрации S345B для удаления остаточных движений в случае попытки регистрации путем выбора, первое разностное изображение DF1 формируется на этапе S350B.
Параллельно с данными этапами или в последовательности с ними на этапе S340A, таким образом, выбираются два других изображения маски MI2, MI3, чтобы каждая запись опознавательной точки на аналогичной фазе вдоха, тем не менее, в дополнение к данному движению, также вызывала движение из второго цикла движения (в частности, сердечной деятельности). В частности, две ссылки изображения маски MI2 и MI3 выбираются таким образом, что разница их фазы сердечного цикла аналогична разнице фазы сердечного цикла между двумя другими изображениями на этапе S340b, то есть, разность фаз (при наличии) в текущем контрастном изображении AG и изображении маски MI1.
На этапе S345A, который также является необязательным, как и фаза S345B применяется коррекция фильтра и/или остаточного движения, как было описано ранее на ФИГ. 2.
Затем на этапе S350A формируется второе разностное изображение DF2 между двумя опорными кадрами маски MI3 и MI2 для достижения второй разности DF2.
На этапе S360 два разностных изображения регистрируются друг на друга, с использованием, например, положения опознавательной точки в двух разностных изображениях, например, положение имплантированного устройства, например, сердечного клапана. Затем два подвижных скомпенсированных/зарегистрированных разностных изображения DF1, DF2 вычитаются друг из друга на этапе S370 для формирования "различие-различия" или каскадного разностного изображения DDF, которое выводится на этапе S380 и становится доступным для дальнейшей обработки изображения или отображения на этапе S390, на котором более подробно показано ниже на ФИГ. 4.
Следует понимать, что, хотя этапы на ФИГ. 2, 3 были описаны с дополнительной ссылкой на циклические движения, это соответствует только одному варианту осуществления изобретения, и обоим вариантам осуществления изобретения, и применению предлагаемых способов для нециклического движения (движений), также рассматриваются в настоящем документе.
Хотя вариант осуществления изобретения по ФИГ. 3 был описан для схемы движения, сформированного из двух движений (то есть, обусловленных соответствующими драйверами), данный подход может быть расширен до трех или более движений путем итеративного применения варианта осуществления изобретения по ФИГ. 3. То есть, начинаются два движения и продолжаются, как описано. Чтобы проследить, скажем, третий компонент движения, затем выбрать четвертое и пятое изображение маски на этапе S340A и продолжить соответственно.
Хотя способы на ФИГ. 3, 4 были описаны со ссылкой на одну опознавательную точку и один ROI, это снова может быть расширено для обработки множества опознавательных точек, где изображения обрабатываются раздельно и изолировано в отношении каждого движения опознавательной точки.
Необязательно, вышеупомянутые способы согласно ФИГ. 2 или 3, также могут включать в себя дополнительный этап маскирования, основанный на трехмерной сегментации обследуемого участка, чтобы дополнительно усилить видимость/контрастность на подучастке интересуемого обследуемого участка. Например, в примерном варианте осуществления изобретения, касающемся оценки регургитации в левом желудочке, данное дополнительное маскирование может быть достигнуто путем регистрации положения клапана на основе трехмерной сегментации так, чтобы все за пределами левого желудочка было замаскировано. Очевидно, что данное двойное маскирование также может применяться в приложениях, отличных от кардиохирургии.
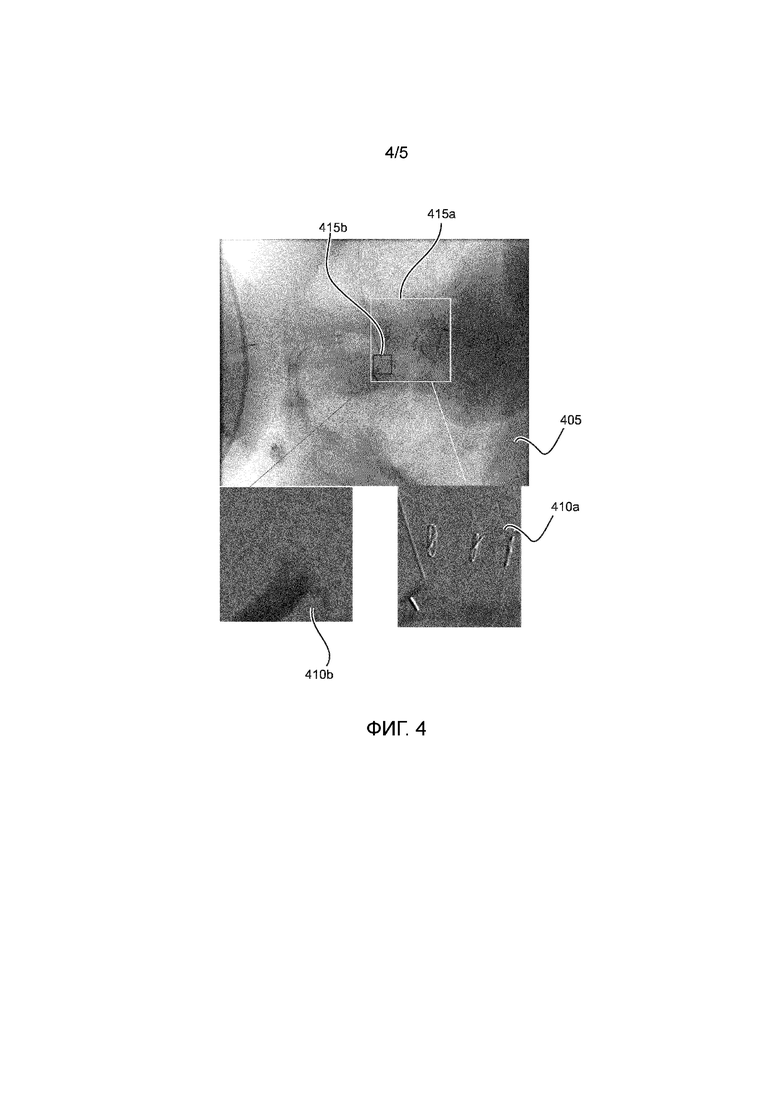
Теперь обратимся к ФИГ. 4, чтобы проиллюстрировать различные режимы отображения для одного или более разностных изображений. Согласно некоторым вариантам осуществления изобретения разностное изображение полностью отображается на мониторе M. В одном конкретном предпочтительном варианте осуществления изобретения, показанном на ФИГ. 4, только неизмененная подчасть или "вырезка" разностного изображения, которая отображается в выделенной области просмотра 410AB на экране вместе с текущим рентгеновским кадром в 405. Иначе говоря, в выделенных окнах просмотра ROI отображается только часть ROI разностного изображения.
Сам обследуемый участок показывается посредством соответствующих накладывающихся графических элементов для 415a,b, наложенных на текущий кадр 405, обрамляющих соответствующие части изображения для каждого ROI. Текущий кадр 405 может быть изображением маски, или текущим контрастным изображением AG, или это может быть обычной DSA без компенсации движения. В более позднем случае, можно подумать о большей области просмотра 405, чтобы предоставить общее представление DSA, в то время, как одна или меньшие области просмотра 410a,b предоставляют соответствующие, локальные, ориентированные на скомпенсированное движение ROI представления DSA. Иначе говоря, в каждой области просмотра отображается секция соответствующего разностного изображения DF, причем секция определяется положением и размером соответствующего ROI, представляющего накладывающийся графический элемент 415a или 415b.
Как показано на ФИГ. 4A, две части изображения обрисованные накладными элементами 415a,b для другого, локального ROI могут перекрываться. Разностные изображения для соответствующих отдельных ROI, представленных накладывающимися графическими элементами 415a,b, вычисляются отдельно и, что касается движения, рассматривается изолированно для каждого ROI с учетом только для его собственного соответствующего движения согласно соответствующей опознавательной точке. Как можно видеть, для каждого ROI, представленного наложением 415a,b, для фиксации соответствующего движения ROI, используется другая опознавательная точка. Например, для ROI накладывающегося элемента 415a опознавательной точкой является след стента, тогда как для ROI накладывающегося элемента 415b соответствующей опознавательной точкой является след наконечника катетера.
В одном варианте осуществления изобретения изображения локально скомпенсированного движения ROI отображаются в соответствующих окнах просмотра 410AB в увеличенных версиях.
В других вариантах осуществления изобретения может быть преимуществом отображать только интересующие области так, что текущий базовый кадр 405 не показан.
В одном варианте осуществления изобретения вспомогательные, дополнительные источники изображения, такие как CT, MRI или другие трехмерные формирователи изображения могут использоваться для поддержки трехмерного выбора опознавательной точки. Затем источник изображения регистрируется на проекционном изображении MI, AG и трехмерная опознавательная точка затем проецируется на проекционное изображение, чтобы таким образом определять след трехмерной опознавательной точки, тем самым предоставляя описанную ранее операцию компенсации движения. Вспомогательные формирователи изображения не обязательно могут быть трехмерными, тем не менее, во всех вариантах осуществления изобретения, например, предусмотрено двумерный вспомогательный формирователь изображения для поддержки выбора опознавательной точки. В таком случае, когда использовалась таким способом вспомогательная визуальная информация, соответствующая информация изображения из вспомогательной визуальной информации может быть наложена как графические накладывающиеся элементы на подсекцию разностного изображения, отображаемого в соответствующем выделенном окне просмотра DSA 410a,b. В дополнение или вместо этого вспомогательная визуальная информация может отображаться, в виде накладывающегося элемента в соответствующем месте ROI в текущем кадре общего обзора 405.
Вышеописанные режимы отображения вида по отношению к ФИГ. 4 могут быть использованы для любого из способов согласно описанным на ФИГ. 3 и ФИГ. 2. Иначе говоря, окна просмотра 410a,b отображают либо секцию разностного изображения согласно ФИГ. 2, либо двойное разностное изображение согласно ФИГ. 3. Хотя на ФИГ.4 показаны два локальных окна просмотра, понятно, что описанный режим отображения может использоваться для любого количества окон просмотра, включая одно локальное окно просмотра.
Что касается поддержки взаимодействия с пользователем, предлагаемая система может также включать в себя функциональность, которая автоматически обнаруживает подходящие опознавательные точки и именно те опознавательные точки, из которых пользователь может делать выбор. Таким образом, обеспечивается то, что опознавательные точки видны на всех изображениях, поэтому нет необходимости прибегать к внешней визуальной информации. В дополнение или в качестве альтернативы, пользователь может выбрать желаемые опознавательные точки и/или контур накладывающихся элементов ROI во вспомогательной визуальной информации, как например, в трехмерном объеме изображения CT и затем отразить на проекционных изображениях MI, AG на основе использования направления проекции проектором изображения 100.
В одном варианте осуществления изобретения, если способы на ФИГ. 2 или ФИГ. 3 применяются к множеству опознавательных точек, опознавательные точки, отображаемые пользователю для выбора, выбираются системой, чтобы давать наименьшую общую ошибку регистрации. Иначе говоря, в данном варианте осуществления изобретения, опознавательные точки предлагаются автоматически, система предварительно вычисляет в фоновом режиме соответствующие ошибки регистрации для данной пары контрастного изображения и изображения маски. Более конкретно, выбор числа (в пределах определенного диапазона и с определенным ухудшением при увеличении данного числа), места и размера опознавательных точек для независимой компенсации движения достигается автоматически, чтобы минимизировать общую ошибку регистрации. Данная общая ошибка регистрации может определяться количественно с использованием соответствующих, индивидуальных векторных полей, как установлено в соответствующих оценках ROI на этапах 220 и 240. В одном варианте осуществления изобретения данные ошибки квантования учитываются путем кластеризации карты ошибок методом оценки плотности и локального движения (таких как оптический поток или алгоритм сопоставления блоков) до оптимального поиска. Тем не менее, следует понимать, что даже в данном варианте осуществления изобретения, где рассматривается общая регистрация, фактическая компенсация движения для каждого из ROI по-прежнему ограничена, чтобы рассматривать только соответствующее движение для опознавательной точки, связанной с данным ROI. Иначе говоря, компенсации движения для каждой операции DSA выполняются отдельно, изолированно друг от друга так, что каждое разностное изображение оптимизируется только для одного конкретного ROI/движения опознавательной точки.
Кроме того, с точки зрения взаимодействия с пользователем, предлагаемый способ может включать в себя схему перетаскивания, в которой пользователь выбирает с помощью клика мыши или действия с сенсорным экраном соответствующий ROI и/или опознавательную точку, а затем перетаскивает ее в результате сдвига по сенсорному экрану или операции перетаскивания мышью по экрану в направлении и на соответствующее окно просмотра. Обозначенные таким образом опознавательные точки затем вводятся в IPS через входной порт ввода опознавательной точки LD-IN. Данное взаимодействие с пользователем затем инициирует вычисление как показано на ФИГ. 2 и 3 выше. В другом варианте осуществления изобретения IPS является полностью автоматической, а именно, опознавательные точки автоматически идентифицируются, и выбираются, и обрабатываются согласно ФИГ. 2, 3 без какого-либо ввода пользователя. В качестве альтернативы, ручные варианты осуществления изобретения также предусмотрены, в которых нет автоматически выбранных ROI/опознавательных точек, предлагаемых пользователю и пользователь может свободно вводить любые.
В одном варианте осуществления изобретения пользователь может отдельно выбирать обследуемый участок, рисуя, например, подходящие окрестности в виде кругов или квадратов, как показано на ФИГ. 4 или рисуя любую другую подходящую геометрическую фигуру. Это определяет размер или "охват" окрестности изображения ROI. В ряде случаев опознавательная точка затем автоматически определяется, если опознавательная точка оказывается внутри обрисованных ROI. Если опознавательная точка находится за пределами ROI, опознавательная точка может быть логически связана с ROI, позволяя отдельной операции связывать с каждым ROI соответствующую опознавательную точку, движение которой должно использоваться с целью достижения операции скомпенсированного движения DSA для соответствующего ROI. Например, схема двойного клика может быть использована для определения ROI и опознавательных точек отдельно, но попарно по определенной заранее синхронизации на этапах взаимодействия с пользователем. Например, пользователь сначала определяет ROI, вычерчивая, скажем, квадрат, определяющий ROI. Затем пользователь делает клик на месте за пределами ROI и система интерпретирует данное второе место как опознавательную точку, которая будет связана только с очерченным ROI в целях оценки суррогатного движения. Данная функция связывания ROI с опознавательной точкой может быть реализована с помощью соответствующих обработчиков схем счетчиков и событий.
Понятно, что вышеописанные операции на ФИГ. 2 и 3 и операции отображения на ФИГ. 4 могут быть выполнены в реальном масштабе времени, в то время как кадры изображения в рентгеноскопическом потоке принимаются в соответствующих портах IN. Тем не менее, также предусмотрен автономный режим, где соответствующие операции компенсации согласно ФИГ. 2 или 3 выполняться с ранее полученным изображением или могут быть выполнены в режиме просмотра. Хотя вышеупомянутый способ описывался на конкретных примерах с точки зрения кардиологического вмешательств, таких как оценка регургитации аортального клапана или процедур эмболизации, следует понимать, что настоящая заявка может найти хорошее применение в любых интервенционных процедурах, где требуются цифровые субтракционные операции. В свою очередь, настоящая заявка не ограничивается только поддержкой интервенционных хирургических процедур. Иные иллюстративные приложения других областей, таких как геология или изучение радиолокационных изображений и так далее, также предусмотрены в настоящем документе.
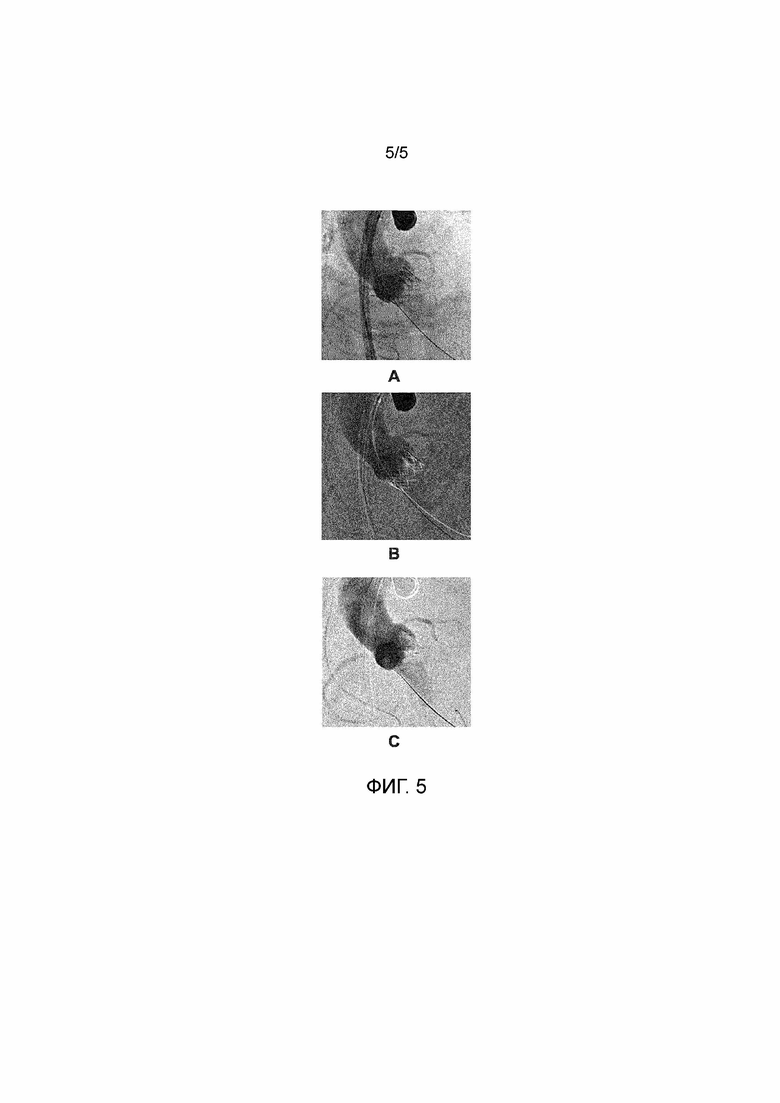
Со ссылкой на ФИГ. 5, иллюстрируется примерный вывод визуальной информации в соответствии с описанным выше способом и сравнивается с обычными подходами. Изображения показывают соответствующий след/радиационные тени искусственного сердечного клапана после размещения. На панели A показана обычная ангиограмма, на панели B показано обычное вычитание ангиограммы с использованием последней доступной кадра маски и на панели C показан результат согласно способу на ФИГ. 2 с использованием искусственного сердечного клапана в качестве опознавательной точки. Здесь присутствует меньше артефактов, особенно рядом с аортальным клапаном. После этого облегчается оценка регургитации в желудочке (появляется ниже имплантированного клапана).
Модуль обработки изображений IPS может быть выполнен как программный модуль или как подпрограмма с подходящими интерфейсами для считывания в потоке рентгенограмм F и может выполняться на вычислительном устройстве общего назначения или выделенном вычислительном устройстве. Например, процессор IPS может выполняться на рабочей станции или на консоле CC системы визуализации 100. Модуль обработки изображений IPS с некоторыми или всеми его компонентами может быть резидентной частью в исполнительном устройстве (таком как, компьютер общего назначения, рабочая станция или консоль) или может быть доступен удаленно/централизовано с помощью исполнительного устройства через подходящую коммуникационную сеть при распределенной архитектуре.
В качестве альтернативы, компоненты модуля обработки изображения IPS могут быть организованы как выделенные FPGA (программируемая пользователем вентильная матрица) или аналогичные автономные микросхемы. Компоненты могут быть запрограммированы на подходящей научной вычислительной платформе, такой как Matlab® или Simulink® и затем транслированы в подпрограммы на C++ или C, поддерживаемые библиотекой и скомпонованные при вызове исполнительным устройством, таким как компьютер общего назначения, рабочая станция или консоль.
В другом примерном варианте осуществления изобретения предоставляется компьютерная программа или компьютерный программный элемент, который характеризуется тем, что он адаптирован для выполнения этапов способа в соответствии с одним из предыдущих вариантов осуществления изобретения на подходящей системе.
Компьютерный программный элемент может, таким образом, быть сохранен на вычислительном устройстве, которое также может быть частью варианта осуществления настоящего изобретения. Данное вычислительное устройство может быть создано с возможностью выполнять или вызывать выполнение этапов, описанного выше способа. Кроме того, оно может быть приспособлено для управления компонентами вышеописанного устройства. Вычислительное устройство может быть выполнено с возможностью автоматической работы и/или для выполнения команд пользователя. Компьютерная программа может загружаться в оперативную память процессора обработки данных. Процессор обработки данных может, таким образом, обеспечивать осуществление способа изобретения.
Данный примерный вариант осуществления изобретения охватывает и компьютерную программу, которая с самого начала использует изобретение, и компьютерную программу, которая посредством обновления превращает существующую программу в программу, которая использует изобретение.
Кроме того, компьютерный программный элемент может предоставлять все необходимые этапы для выполнения процедуры примерного варианта осуществления изобретения способом, как описано выше.
Согласно еще одному примерному варианту осуществления настоящего изобретения представляется машиночитаемый носитель, такой как CD-ROM, на котором машиночитаемый носитель хранит компьютерный программный элемент, который описывается в предыдущем разделе.
Компьютерная программа может храниться и/или распространяться на подходящем для этого носителе, таком как оптический носитель данных или твердотельный носитель, поставляемый вместе с или как часть другого оборудования, но также может распространяться в других формах, например, через Интернет или через другие проводные или беспроводные телекоммуникационные системы.
Тем не менее, компьютерная программа также может быть предоставлена через сеть, такую как "всемирная паутина" и может быть загружена в оперативную память процессора обработки данных из такой сети. Согласно еще одному примерному варианту осуществления настоящего изобретения среда для создания компьютерного программного элемента доступна для загрузки, причем компьютерный программный элемент создается с возможностью выполнять способ согласно одному из ранее описанных вариантов осуществления изобретения.
Следует отметить, что варианты осуществления изобретения описываются со ссылкой на различные предметные вопросы. В частности, некоторые варианты осуществления изобретения описываются со ссылкой на тип способа пункта формулы изобретения, тогда как другие варианты осуществления изобретения описываются со ссылкой на тип устройства пункта формулы изобретения. Тем не менее, специалист в данной области техники поймет из вышеизложенного и последующего описания, что, если не указано иное, помимо любой комбинации признаков, относящихся к одному типу предметов, также любая комбинация характеристик, относящихся к одному типу предметов, считается раскрытой в настоящей заявке. Тем не менее, все функции могут быть объединены, обеспечивая синергетические эффекты, которые представляются большим, чем простое суммирование функций.
Хотя изобретение было проиллюстрировано и подробно описано на чертежах и вышеприведенном описании, такие иллюстрация и описание должны рассматриваться в качестве иллюстративных или в качестве примеров, а не ограничивающих. Изобретение не ограничивается раскрытыми вариантами осуществления изобретения. Другие варианты раскрытия вариантов осуществления изобретения могут быть понятны и выполнены специалистами в данной области техники при осуществлении заявленного изобретения, из изучения чертежей, раскрытия изобретения и зависимых пунктов формулы изобретения.
В формуле изобретения слово "включающий в себя" не исключает других элементов или этапов, а единственное число не исключает множественность. Один процессор или другое устройство может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Сам факт того, что некоторые критерии взаимно цитируются в различных зависимых пунктах формулы изобретения, не указывает на то, что комбинация данных критериев не может быть использована для получения преимущества. Любые ссылочные позиции в формуле изобретения не должны толковаться как ограничивающие объем.
| название | год | авторы | номер документа |
|---|---|---|---|
| СОЗДАНИЕ МАСКИ ДЛЯ КАРДИОСУБСТРАКЦИИ | 2009 |
|
RU2519353C2 |
| ФОРМИРОВАНИЕ ФУНКЦИОНАЛЬНЫХ ИЗОБРАЖЕНИЙ | 2011 |
|
RU2559930C2 |
| ПРОВЕРКА И ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЯ СЕРДЦА В ЭМИССИОННЫХ ИЗОБРАЖЕНИЯХ | 2011 |
|
RU2596982C2 |
| ОЦЕНКА ЛЕЧЕНИЯ С ИСПОЛЬЗОВАНИЕМ УЛЬТРАЗВУКОВЫХ КОНТРАСТНЫХ ВЕЩЕСТВ | 2009 |
|
RU2492812C2 |
| СИНХРОНИЗИРОВАННАЯ С ДЫХАТЕЛЬНЫМИ ДВИЖЕНИЯМИ ОЦЕНКА ЭФФЕКТИВНОСТИ ЛЕЧЕНИЯ С ПРИМЕНЕНИЕМ УЛЬТРАЗВУКОВЫХ КОНТРАСТНЫХ ВЕЩЕСТВ | 2009 |
|
RU2494674C2 |
| СКАНИРУЮЩЕЕ РЕНТГЕНОВСКОЕ УСТРОЙСТВО С ПОЛНОФОРМАТНЫМ ДЕТЕКТОРОМ | 2016 |
|
RU2720292C2 |
| ФОРМИРОВАНИЕ ФАЗОВО-КОНТРАСТНЫХ ИЗОБРАЖЕНИЙ | 2010 |
|
RU2545319C2 |
| УСТРОЙСТВО И СПОСОБ ПРОГНОЗИРУЕМОЙ АВТОФОКУСИРОВКИ ДЛЯ ОБЪЕКТА | 2021 |
|
RU2778355C1 |
| ВИЗУАЛИЗАЦИЯ ТРЕХМЕРНЫХ ИЗОБРАЖЕНИЙ В КОМБИНАЦИИ С ДВУМЕРНЫМИ ПРОЕКЦИОННЫМИ ИЗОБРАЖЕНИЯМИ | 2007 |
|
RU2471239C2 |
| СИСТЕМЫ И СПОСОБЫ ЦИФРОВОГО ЛАЗЕРНОГО ПРОЕЦИРОВАНИЯ С УСИЛЕННЫМ КОНТРАСТОМ С ИСПОЛЬЗОВАНИЕМ ФУРЬЕ-ФИЛЬТРА | 2019 |
|
RU2782886C2 |
Изобретение относится к вычислительной технике. Технический результат – повышение качества изображения. Система обработки изображений (IPS) включает: входной порт (IN) для получения проекционных изображений (F): изображения маски (MI) и контрастного изображения (AG) из образца (SP) с объектом (OB), причем MI и AG получены в разное время и каждое представляет обследуемый участок ROI с различными контрастами; идентификатор опознавательной точки (LID); блок оценки движения (ME); блок компенсации движения (MC); блок вычитания (DIFF) для вычитания зарегистрированного M1 из AG для получения разностного изображения (DF1) ROI и выходной порт (OUT), выполненный с возможностью вывода разностного изображения (DF1). 3 н. и 12 з.п. ф-лы, 5 ил.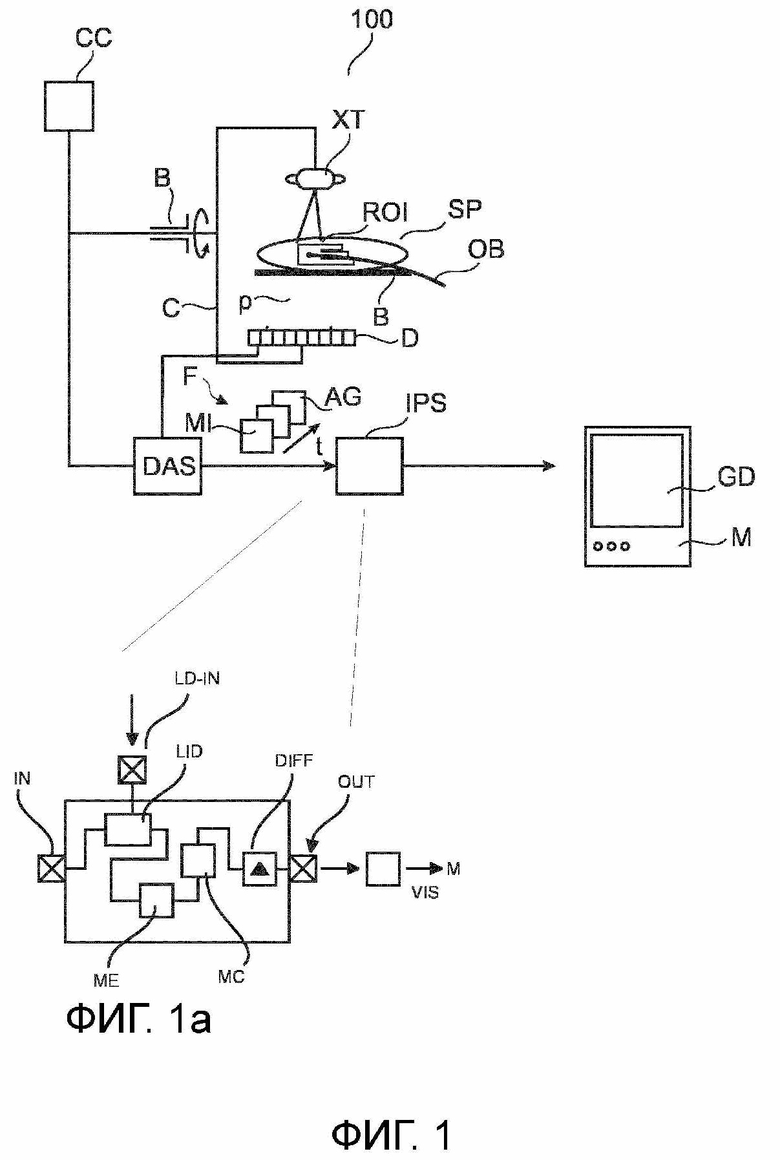
1. Система обработки изображений (IPS), включающая в себя:
входной порт (IN), выполненный с возможностью получения по меньшей мере двух проекционных изображений (F), включающих в себя по меньшей мере одно изображение маски (MI) и по меньшей мере одно контрастное изображение (AG) из, по меньшей мере, части образца (SP) с объектом (OB) на нем, причем изображение маски (MI) и контрастное изображение (AG) получены в разное время исследования и каждое из них представляет обследуемый участок, ROI, с различными контрастами;
идентификатор опознавательной точки (LID), сконфигурированный для идентификации, по меньшей мере, одной опознавательной точки упомянутого объекта (OB) в контрастном изображении (AG) и в, по меньшей мере, одном изображении маски (MI);
блок оценки движения (ME), сконфигурированный для оценки движения объекта (OB) согласно движению идентифицированной, по меньшей мере, одной опознавательной точки, по меньшей мере, на контрастном изображении (AG) и, по меньшей мере, на одном изображении маски (MI), причем упомянутое движение относится к движению ROI;
блок компенсации движения (MC), сконфигурированный для регистрации, по меньшей мере, одного изображения маски (M1) с, по меньшей мере, одним контрастным изображением (AG), только на основе оцененного движения опознавательной точки;
блок вычитания (DIFF), сконфигурированный для вычитания, по меньшей мере, одного зарегистрированного изображения маски (M1) из, по меньшей мере, одного контрастного изображения (AG) для получения разностного изображения (DF1) ROI, и
выходной порт (OUT), выполненный с возможностью вывода разностного изображения (DF1).
2. Система обработки изображений по п. 1, включающая в себя блок визуализации (VIS), сконфигурированный для отображения на устройстве отображения (MT), по меньшей мере, части упомянутого разностного изображения (DF1), которое соответствует ROI.
3. Система обработки изображений по п. 1 или 2, в которой идентификатор опознавательной точки основан на вспомогательных данных изображения, зарегистрированных с, по меньшей мере, одним из проекционных изображений (M1, AG).
4. Система обработки изображений по п. 1 или 2, в которой опознавательная точка является объектом первого движения, при этом операция регистрации блоком компенсации движения (MC) включает в себя выбор изображения маски (M1) таким образом, что положение опознавательной точки согласно выбранному изображению маски (MI) соответствует положению опознавательной точки согласно, по меньшей мере, одному контрастному изображению (AG).
5. Система обработки изображений по любому из предшествующих пунктов, включающая в себя входной порт определения опознавательной точки (ROI-IN), причем идентификатор (LID) выполнен с возможностью идентификации опознавательной точки в ответ на получение по упомянутому входному порту (ROI-IN) определения опознавательной точки или множества опознавательных точек, причем определение представляет собой выбор из изображения маски (M1) или из контрастного изображения (AG).
6. Система обработки изображений по п. 2, в которой блок визуализации (VIZ) выполнен с возможностью отображения на устройстве отображения (MT), по меньшей мере, части разностного изображения (DF1) вместе с изображением маски (M) и/или контрастного изображения (AG).
7. Система обработки изображений по любому из предшествующих пунктов 4-6, в которой блок визуализации (VIZ) выполнен с возможностью отображения, по меньшей мере, части зарегистрированных вспомогательных данных изображения.
8. Система обработки изображений по любому из предшествующих пунктов, при этом система выполнена с возможностью обработки, по меньшей мере, двух проекционных изображений (M, AG) в отношении второй опознавательной точки и/или второго ROI для получения второго разностного изображения (DF2), причем блок визуализации (VIS) выполнен с возможностью отображения, по меньшей мере, части упомянутого второго разностного изображения (DF2) вместо или вместе с разностным изображением (DF1).
9. Система обработки изображений по любому из предшествующих пунктов, в которой блок визуализации (VIS) выполнен с возможностью отображения в изображении маски (M1), накладывающегося графического элемента (415 a,b), указывающего местоположение ROI и/или второго ROI.
10. Система обработки изображений по любому из предшествующих пунктов 4-9, в которой опознавательная точка является комбинацией двух движений, причем блок компенсации движения (MC) выполнен с возможностью:
выбора двух дополнительных изображений маски (MI2, MI3) таким образом, что i) положения опознавательной точки в связи с первым движением согласно двум дополнительным проекционным изображениям маски, по существу, одинаковы и ii) разница положения в отношении второго движения, по существу, такая же, как для опознавательной точки согласно изображению маски и согласно, по меньшей мере, одному контрастному изображению (AG).
11. Система обработки изображений по п. 10, в которой блок вычитания (DIFF) выполнен с возможностью:
вычитания упомянутых двух дополнительных изображений маски (MI2, MI3) с целью получения разностного изображения маски (DM),
после компенсации движения в отношении первого движения, вычитание разностного изображения маски (DM) из разностного изображения (D) с целью получения каскадного разностного изображения (DDF).
12. Система обработки изображений по п. 11, в которой блок визуализации (VIS) выполнен с возможностью отображения на экране (MT), по меньшей мере, части упомянутого каскадного разностного изображения (DDF).
13. Система обработки изображений по любому из предшествующих пунктов, в которой опознавательная точка является или относится к проекционному следу собственного объекта или постороннего объекта (OB), в частности имплантированного объекта, находящегося в образце (SP) в соответствующие моменты времени получения проекционного изображения маски (M1) и проекционного изображения (AG).
14. Способ обработки изображений, включающий в себя этапы, на которых:
получают (S210, S310), по меньшей мере, два проекционных изображения (F), включающих в себя, по меньшей мере, одно проекционное изображение маски (MI) и, по меньшей мере, одно контрастное изображение (AG), по меньшей мере, части образца (SP) с объектом (OB) в нем, причем проекционное изображение маски (MI) и контрастное изображение (AG) получают в разное время исследования и представляют обследуемый участок, ROI, при различных контрастах;
идентифицируют (S220, S320), по меньшей мере, одну опознавательную точку упомянутого объекта (OB) на контрастном изображении (AG) и, по меньшей мере, одно изображение маски (MI);
оценивают (S230, S330) движение объекта согласно движению идентифицированной, по меньшей мере, одной опознавательной точки на, по меньшей мере, контрастном изображении (AG) и, по меньшей мере, одном изображении маски (MI), причем упомянутое движение относится к движению ROI;
регистрируют (S240, S340), по меньшей мере, одно проекционное изображение маски (M1) с, по меньшей мере, одним контрастным изображением (AG) на основе только оцененного ожидаемого движения опознавательной точки;
вычитают (S250, S350), по меньшей мере, одно зарегистрированное изображение маски (M1) из, по меньшей мере, одного контрастного изображения (AG) для получения разностного изображения (DF1) ROI и
выводят (S260, S360) разностное изображение (DF1).
15. Машиночитаемый носитель, содержащий компьютерную программу, которая при выполнении обрабатывающим устройством предписывает обрабатывающему устройству выполнять этапы способа по п. 14.
| US 8480582 B2, 09.07.2013 | |||
| YINGLIANG M.A | |||
| et al | |||
| Clinical Evaluation of Respiratory Motion Compensation for Anatomical Roadmap Guided Cardiac Electrophysiology Procedures, IEEE transactions on biomedical engineering, vol | |||
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Схема обмотки ротора для пуска в ход индукционного двигателя без помощи реостата, с применением принципа противосоединения обмоток при трогании двигателя с места | 1922 |
|
SU122A1 |
| Размещено по адресу: https://ieeexplore.ieee.org/document/6020752 | |||

