РОДСТВЕННЫЕ ЗАЯВКИ
Настоящая заявка испрашивает приоритет согласно предварительной заявке на патент США с регистрационным номером 62/209933, поданной 26 августа 2015 г., которая полностью включена в данный документ посредством ссылки на нее.
ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение в целом относится к области визуализации методом магнитоиндукционной томографии и, более конкретно, к портативным устройствам для визуализации методом магнитоиндукционной томографии.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Визуализация методом магнитоиндукционной томографии может применяться для визуализации распределения электромагнитных характеристик (например, удельной проводимости или диэлектрической проницаемости) в тканях. Более конкретно, методики магнитоиндукционной томографии могут обеспечивать низкозатратное бесконтактное измерение электромагнитных характеристик ткани на основании вихревых токов, индуцированных в тканях посредством катушек индуктивности, размещенных рядом с тканью.
Электромагнитные характеристики, такие как удельная проводимость и диэлектрическая проницаемость, варьируют в объеме ткани вследствие наличия естественных контрастных зон, образуемых жиром, костями, мышцами и различными органами. В результате этого, распределение удельной проводимости или диэлектрической проницаемости, полученное при помощи методик визуализации методом магнитоиндукционной томографии, может применяться для визуализации различных участков тела, включая легкие и области живота, ткань головного мозга и другие участки тела, которые может быть или может не быть трудно визуализировать с помощью других низкозатратных биомедицинских методик визуализации, таких как ультразвуковое исследование. Таким образом, визуализация методом магнитоиндукционной томографии может применяться в биомедицинской визуализации, например, ран, язв, травм головного мозга и других ненормальных состояний ткани.
Существующие методики для визуализации методом магнитоиндукционной томографии, как правило, включают размещение значительного количества катушек (например, группы катушек) вблизи образца и построение изображения на основании измеренной взаимной индуктивности пар катушек среди значительного количества катушек, размещенных вблизи образца. Например, группа генераторных катушек и группа приемных катушек могут быть размещены рядом с образцом. Одна или несколько генераторных катушек могут быть возбуждены с применением радиочастотной энергии, причем отклик может быть измерен на приемных катушках. Распределение удельной проводимости (или распределение диэлектрической проницаемости) образца можно определить исходя из отклика приемных катушек.
Визуализация методом магнитоиндукционной томографии может быть осуществлена с использованием результатов измерений, связанных с одной катушкой. Однако реализация этих методик с использованием портативного устройства для сбора результатов измерения катушки может быть связана с рядом проблем. Например, рука специалиста, использующего устройство, может создавать помехи во время сканирования, если устройство удерживают неправильно. Кроме того, источник питания, электроника, провода и другие элементы могут создавать помехи одной катушке, что является причиной менее точных результатов измерения катушки. Кроме того, для точной визуализации методом магнитоиндукционной томографии положение, связанное с каждым результатом измерения катушки, предпочтительно известно с некоторой степенью точности. Такую степень точности может быть трудно достичь с портативными устройствами, которые специалист физически перемещает с одного местоположения в другое во время сканирования посредством портативного устройства.
КРАТКОЕ ОПИСАНИЕ
Аспекты и преимущества вариантов осуществления настоящего изобретения будут частично изложены в последующем описании, или могут быть изучены из описания, или могут быть изучены посредством практического применения вариантов осуществления.
Один примерный аспект настоящего изобретения относится к портативному устройству для магнитоиндукционной томографии. Портативное устройство для магнитоиндукционной томографии содержит корпус и по меньшей мере один измерительный блок. Каждый измерительный блок содержит одну катушку. Портативное устройство для магнитоиндукционной томографии выполнено с возможностью получения результата измерения катушки посредством измерительного блока, когда одна катушка размещена рядом с образцом. Система дополнительно содержит систему определения положения, выполненную с возможностью определения положения портативного устройства для магнитоиндукционной томографии, связанного с каждым результатом измерения катушки. Система дополнительно содержит систему создания графика, выполненную с возможностью создания графика электромагнитных характеристик по меньшей мере части образца по меньшей мере частично на основании результата измерения катушки.
Другой примерный аспект настоящего изобретения относится к портативному устройству для магнитоиндукционной томографии. Портативное устройство для магнитоиндукционной томографии может содержать корпус, имеющий форм-фактор, способствующий удержанию его рукой, и по меньшей мере один измерительный блок. Каждый измерительный блок содержит одну катушку. Портативное устройство для магнитоиндукционной томографии дополнительно содержит один или несколько электрических компонентов, отнесенных от по меньшей мере одного измерительного блока на достаточное расстояние для уменьшения электромагнитных помех между одним или несколькими электрическими компонентами и по меньшей мере одним измерительным блоком. Портативное устройство для магнитоиндукционной томографии может быть выполнено с возможностью получения результата измерения катушки посредством измерительного блока, когда одна катушка размещена рядом с образцом.
Еще один примерный аспект настоящего изобретения относится к способу визуализации методом магнитоиндукционной томографии. Способ включает получение доступа ко множеству результатов измерения характеристик катушки, полученных для образца, с помощью одной катушки портативного устройства для магнитоиндукционной томографии. Каждый из результатов измерения характеристик катушки может быть получен с помощью одной катушки в одном из множества отдельных местоположений относительно образца. Способ включает соотнесение данных о положении катушки с каждым из множества результатов измерения характеристик катушки. Данные о положении катушки могут указывать на положение и ориентацию одной катушки относительно образца для каждого результата измерения катушки. Положение катушки можно получить с помощью системы определения положения, выполненной с возможностью определения положения портативного устройства для магнитоиндукционной томографии. Способ дополнительно включает получение доступа к модели, определяющей отношение между результатами измерения характеристик катушки, полученными с помощью одной катушки, и электромагнитной характеристикой образца, и создание трехмерного графика электромагнитных характеристик образца с помощью модели, основанной по меньшей мере частично на множестве результатов измерения характеристик катушки и данных о положении катушки, связанных с каждым результатом измерения катушки.
В эти примерные аспекты настоящего изобретения могут быть внесены изменения и модификации.
Эти и другие признаки, аспекты и преимущества различных вариантов осуществления станут более понятны со ссылкой на последующее описание и прилагаемую формулу изобретения. Прилагаемые графические материалы, которые включены в данное описание и составляют его часть, иллюстрируют варианты осуществления настоящего изобретения и вместе с описанием служат для объяснения
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
Подробное описание вариантов осуществления, предназначенное для специалиста в данной области техники, изложено в описании изобретения, которое ссылается на прилагаемые фигуры, на которых:
на фиг. 1 изображена примерная система для визуализации методом магнитоиндукционной томографии с помощью портативного устройства согласно примерным вариантам осуществления настоящего изобретения;
на фиг. 2 изображен вид в перспективе примерного портативного устройства согласно примерным вариантам осуществления настоящего изобретения;
на фиг. 3 изображен вид сбоку примерного портативного устройства согласно примерным вариантам осуществления настоящего изобретения;
на фиг. 4-5 изображены примерные графики удельной проводимости, созданные согласно примерным вариантам осуществления настоящего изобретения;
на фиг. 6 изображена примерная катушка для визуализации методом магнитоиндукционной томографии согласно примерным вариантам осуществления настоящего изобретения;
на фиг. 7 изображены примерные соединительные дорожки для катушки для визуализации методом магнитоиндукционной томографии согласно примерным вариантам осуществления настоящего изобретения;
на фиг. 8 изображена блок-схема последовательности этапов выполнения примерного способа создания катушки для визуализации методом магнитоиндукционной томографии согласно примерным вариантам осуществления настоящего изобретения;
на фиг. 9 изображена структурная схема примерной схемы, связанной с катушкой, применяемой для визуализации методом магнитоиндукционной томографии согласно примерным вариантам осуществления настоящего изобретения; и
на фиг. 10 изображена блок-схема последовательности этапов выполнения примерного способа визуализации методом магнитоиндукционной томографии согласно примерным вариантам осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
Далее будет сделана ссылка в развернутой форме на варианты осуществления, один или несколько примеров которых показаны на графических материалах. Каждый пример приведен для пояснения вариантов осуществления и не ограничивает настоящее изобретение. В действительности, специалистам в данной области техники ясно, что в варианты осуществления могут быть внесены различные модификации и изменения в пределах объема или сущности настоящего изобретения. Например, признаки, показанные или описанные как часть одного варианта осуществления, могут быть использованы в другом варианте осуществления для получения еще одного варианта осуществления. Таким образом, предполагается, что аспекты настоящего изобретения охватывают такие модификации и изменения.
Общие сведения
В целом, примерные аспекты настоящего изобретения относятся к портативным устройствам для визуализации методом магнитоиндукционной томографии образца, такого как образец ткани, с помощью результатов измерения, связанных с одной катушкой. Более конкретно, множество результатов измерения характеристик катушки может быть получено с помощью одной катушки во множестве разных отдельных местоположений относительно образца с помощью портативного устройства. Трехмерный график электромагнитных характеристик, такой как трехмерный график удельной проводимости или трехмерный график диэлектрической проницаемости, может быть создан из множества результатов измерения характеристик катушки. Таким образом, простой и экономичный способ визуализации ткани может быть предоставлен с использованием результатов бесконтактных измерений характеристик катушки, полученных с помощью портативного устройства.
Более конкретно, система для визуализации методом магнитоиндукционной томографии может содержать портативное устройство для магнитоиндукционной томографии, содержащее корпус и по меньшей мере один измерительный блок. По меньшей мере один измерительный блок может содержать одну катушку. В некоторых вариантах осуществления корпус может иметь форм-фактор, способствующий удержанию портативного устройства рукой, например, рукой специалиста. Например, корпус может иметь размер, форму и геометрию, способствующие удержанию портативного устройства рукой. За счет предоставления переносного портативного устройства для визуализации методом магнитоиндукционной томографии можно повысить простоту и гибкость выполнения измерений катушки для образца в системе для визуализации методом магнитоиндукционной томографии.
В некоторых вариантах осуществления корпус портативного устройства может иметь такой форм-фактор, что местоположение, в котором рука захватывает или иным образом удерживает корпус, отнесено (например, отнесено на пороговое расстояние) от измерительного блока при эксплуатации портативного устройства. Например, захватываемая часть портативного устройства может быть расположена на пороговом расстоянии от измерительного блока. Таким образом, могут быть уменьшены помехи, возникающие в результате размещения руки специалиста возле одной катушки по меньшей мере одного измерительного блока во время сбора результатов измерения катушки.
В корпусе портативного устройства может размещаться по меньшей мере один измерительный блок, содержащий одну катушку. В некоторых вариантах осуществления катушка может содержать множество концентрических проводящих круглых витков с достаточным промежутком между витками или достаточно разными радиусами для уменьшения емкостной связи с образцом. Проводящие витки могут быть последовательно соединены с соединительными дорожками, при этом предотвращается искажение соединительными дорожками полей, образованных множеством концентрических проводящих круглых витков. Множество концентрических проводящих витков могут быть расположены в нескольких плоскостях (например, на многослойной печатной плате) в виде двухслойной стопки. Промежуток между плоскостями или расстояние между плоскостями может быть выбрано таким образом, чтобы множество проводящих витков можно было математически представить как находящиеся в общей плоскости в целях количественной аналитической модели. Например, расстояние между плоскостями может находиться в диапазоне от приблизительно 0,2 мм до приблизительно 0,7 мм, например, приблизительно 0,5 мм. В данном контексте применение термина «приблизительно» относительно размера или другой характеристики предназначено для указания конкретного размера или другой характеристики в пределах 30%.
В некоторых вариантах осуществления портативное устройство для магнитоиндукционной томографии может содержать корпус, в котором могут размещаться измерительные блоки разных размеров. Например, в корпусе могут размещаться модульные измерительные блоки (например, картриджи), которые могут быть взаимозаменяемыми друг с другом на портативном устройстве (например, с помощью застежек-липучек или других подходящих креплений или крепежных механизмов, способствующих быстрой взаимной замене измерительных блоков). Каждый измерительный блок может содержать катушку, размеры которой отличаются от размеров катушки других измерительных блоков, для обеспечения разных глубин измерения, осуществляемого посредством портативного устройства для магнитоиндукционной томографии. В некоторых вариантах осуществления в портативном устройстве для магнитоиндукционной томографии может размещаться множество измерительных блоков. Каждый измерительный блок может содержать одну катушку для выполнения измерения катушки. В конкретных реализациях каждый из множества измерительных блоков может содержать катушки с отличающимися размерами, вследствие чего портативное устройство для магнитоиндукционной томографии может поддерживать измерения на различных глубинах без необходимости во взаимной замене измерительных блоков на портативном устройстве для магнитоиндукционной томографии.
В некоторых вариантах осуществления портативное устройство для магнитной томографии может содержать один или несколько электрических и/или механических компонентов, которые могут использоваться для поддержки эксплуатации портативного устройства для магнитоиндукционной томографии. Например, портативное устройство может содержать один или несколько электрических компонентов, таких как источник питания (например, одна или несколько батарей), источник РЧ-энергии (например, колебательный контур), схема измерения, используемая для приведения в действие измерительного блока и получения результатов измерения катушки, один или несколько процессоров (например, микроконтроллеры), используемых для управления различными параметрами портативного устройства, одно или несколько запоминающих устройств, предназначенных для хранения результатов измерения катушки, одно или несколько устройств определения положения (например, оптические, электромагнитные или другие датчики движения, используемые для определения положения и/или ориентации портативного устройства), и одно или несколько устройств связи.
В некоторых вариантах осуществления один или несколько электрических компонентов могут быть расположены в корпусе портативного устройства, например, на одной или нескольких печатных платах, расположенных внутри корпуса портативного устройства. Один или несколько электрических и/или механических компонентов могут быть отделены в корпусе от по меньшей мере одного измерительного блока для уменьшения электромагнитных помех между по меньшей мере одним измерительным блоком и одним или несколькими электрическими и/или механическими компонентами. В конкретных реализациях портативное устройство может содержать экранирующий элемент, используемый для отделения по меньшей мере одного измерительного блока от одного или нескольких электрических и/или механических компонентов портативного устройства.
В некоторых вариантах осуществления один или несколько электрических и/или механических компонентов, используемых для поддержки эксплуатации портативного устройства, могут быть расположены на удаленной станции. Например, один или несколько электрических компонентов, описанных выше, могут быть расположены на удаленной станции для уменьшения помех по меньшей мере одному измерительному блоку. Портативное устройство может поддерживать связь с одним или несколькими электрическими компонентами, расположенными на удаленной станции, с помощью подходящего интерфейса связи, такого как любой подходящий интерфейс проводной или беспроводной связи, или их комбинации. В конкретных реализациях удаленная станция может быть расположена на подвижной тележке или другом подвижном устройстве, способствующем размещению удаленной станции возле портативного устройства, когда портативное устройство выполняет измерения образца.
В соответствии с конкретными аспектами настоящего изобретения система для магнитоиндукционной томографии может дополнительно содержать систему определения положения, выполненную с возможностью получения данных о положении для каждого измерения катушки, выполняемого портативным устройством. Система определения положения может быть выполнена с возможностью определения данных, указывающих положение и/или ориентацию при каждом измерении катушки, используемых при создании графика электромагнитных характеристик образца.
В одном варианте осуществления система определения положения может содержать оптическую систему определения положения. В оптической системе определения положения может использоваться один или несколько инфракрасных датчиков, лазеров и/или одна или несколько камер или других устройств захвата изображений для определения положения портативного устройства при выполнении измерения катушки. Например, в одной реализации система определения положения содержит по меньшей мере одну камеру, выполненную с возможностью захвата изображения портативного устройства во время выполнения измерения. Изображение может быть обработано для нахождения местоположения портативного устройства на изображении. Например, могут использоваться методики распознавания образов для определения положения портативного устройства на изображении на основании образа или отражающего элемента, расположенного на портативном устройстве. На основании положения портативного устройства на изображении система определения положения может вычислять положение и/или ориентацию портативного устройства, а также положение и/или ориентацию одной катушки при выполнении измерения катушки, используемые при создании графика электромагнитных характеристик образца.
В некоторых вариантах осуществления система определения положения может содержать электромагнитную систему определения положения. Например, система определения положения может содержать низкочастотную (Pohemus) систему определения положения и/или радиолокационную (UHF) систему определения положения. В некоторых вариантах осуществления система определения положения может содержать акустическую систему определения положения, такую как гидроакустическая система определения положения. В еще одних вариантах осуществления могут использоваться сигналы от одного или нескольких датчиков, расположенных на самом портативном устройстве (например, датчиков движения, инерционных датчиков, лазеров, датчиков глубины, камер и т. д.), для определения положения и/или ориентации портативного устройства относительно образца.
Система может дополнительно содержать систему создания графика, выполненную с возможностью создания графика электромагнитных характеристик (например, графика удельной проводимости) по меньшей мере части образца, по меньшей мере частично на основании результата измерения характеристик катушки. Система создания графика может быть расположена на портативном устройстве или расположена на удаленной станции, поддерживающей связь с портативным устройством.
В соответствии с конкретными вариантами осуществления визуализация методом магнитоиндукционной томографии может быть выполнена по меньшей мере частично на основании модели, которая определяет отношение между результатами измерения катушки и распределением электромагнитных характеристик образца. В одной реализации модель представляет собой количественную аналитическую модель, которая описывает действительную часть изменения импеданса (например, омические потери) одной плоской многовитковой катушки, имеющей множество концентрических проводящих витков, происходящего в результате индуцированных вихревых токов после ее возбуждения РЧ-энергией и размещения вблизи объектов произвольной формы с произвольным трехмерным распределением удельной проводимости.
С помощью модели можно создать трехмерный график электромагнитных характеристик ткани с применением множества результатов измерения характеристик катушки. Например, может быть получен доступ ко множеству результатов измерения потерь в катушке, полученных для образца. Каждый результат измерения характеристик катушки может быть связан с одним из множества отдельных местоположений относительно образца. Данные о положении могут быть связаны с каждым результатом измерения характеристик катушки. Данные о положении могут указывать на положение и ориентацию одной катушки после осуществления измерения.
После получения множества результатов измерения характеристик катушки и связанных данных о положении, инверсия полученных результатов измерения характеристик катушки может быть осуществлена с помощью модели для получения трехмерного графика электромагнитных характеристик, указывающего на распределение электромагнитных характеристик (например, распределение удельной проводимости) образца, приводящее ко множеству полученных результатов измерения. В одной частной реализации инверсия может быть осуществлена путем дискретизации образца в виде сетки конечных элементов. Нелинейный метод наименьших квадратов или метод наименьших квадратов с ограничениями может определять распределение электромагнитных характеристик для сетки конечных элементов, которая с наибольшей вероятностью вносит вклад во множество полученных результатов измерения характеристик катушки. Решенное распределение удельной проводимости может быть представлено в виде трехмерного графика удельной проводимости для образца.
Примерные системы для визуализации методом магнитоиндукционной томографии
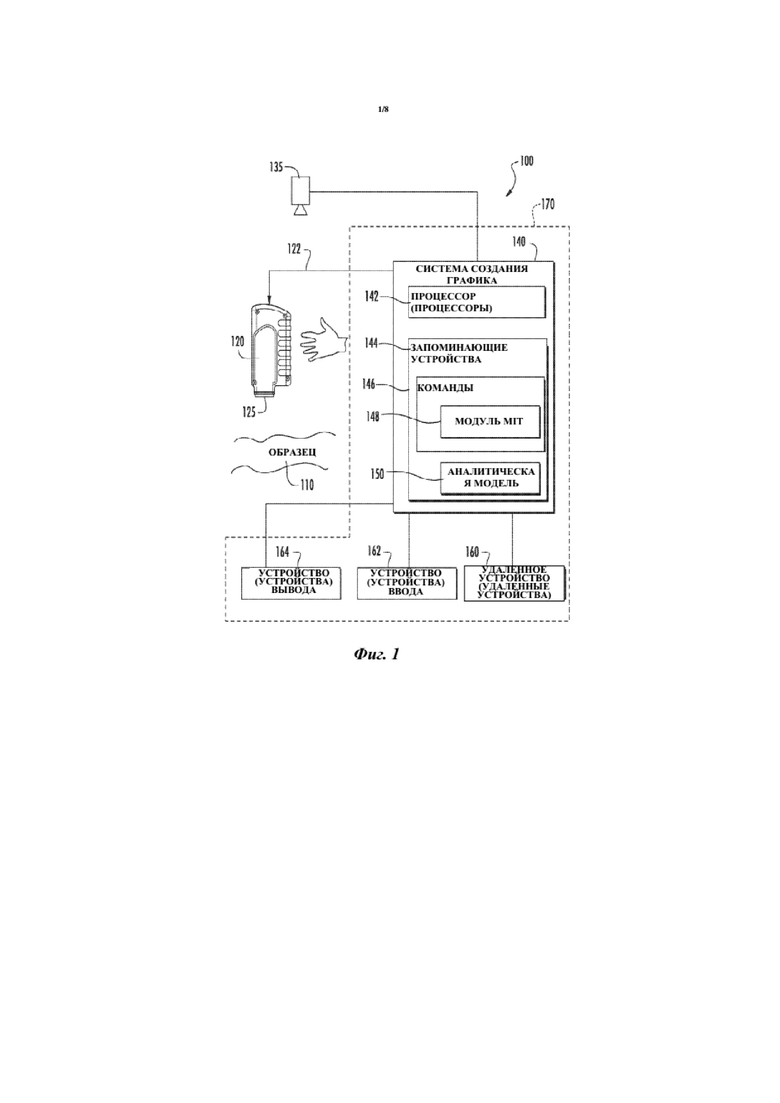
На фиг. 1 изображена примерная система 100 для визуализации методом магнитоиндукционной томографии образца 110, такого как образец ткани человека или ткани животного. Система 100 содержит портативное устройство 120, имеющее по меньшей мере один измерительный блок 125 для получения результатов измерения характеристик катушки для визуализации методом магнитоиндукционной томографии согласно примерным аспектам настоящего изобретения. Измерительный блок 125 может содержать одну катушку, имеющую множество концентрических проводящих витков, расположенных в одной или нескольких плоскостях на печатной плате. Одна примерная конструкция катушки для визуализации методом магнитоиндукционной томографии согласно примерным аспектам настоящего изобретения будет описана более подробно ниже со ссылкой на фиг. 6 и 7.
Примерные аспекты настоящего изобретения будут описаны со ссылкой на портативное устройство120, имеющее один измерительный блок, в целях иллюстрации и пояснения. Средним специалистам в данной области техники, с учетом описания, предоставленного в данном документе, будет понятно, что портативное устройство 120 может содержать множество измерительных блоков. Каждый измерительный блок может содержать одну катушку. Независимые результаты измерения, связанные с каждой одной катушкой, могут использоваться для создания графика электромагнитных характеристик, что будет описано подробнее ниже, независимо от результатов измерения от катушек, связанных с другими измерительными блоками.
Портативное устройство 120 по фиг. 1 может содержать источник РЧ-энергии (например, колебательный контур), выполненный с возможностью возбуждения катушки измерительного блока 125 РЧ-энергией на частоте возбуждения (например, 12,5 МГц) после размещения измерительного блока 125 рядом с образцом 110. Возбужденная катушка измерительного блока 125 может генерировать магнитные поля, которые могут индуцировать вихревые токи в образце 110. Эти индуцированные вихревые токи в образце могут приводить к возникновению потерь в катушке измерительного блока 125 (например, изменению импеданса). Портативное устройство 120 может содержать схему и электрические компоненты (например, схему измерения) для определения потерь в катушке, соответствующих катушке измерительного блока 125, во время измерения характеристик катушки в конкретном местоположении относительно образца 110.
Результаты измерения характеристик катушки могут быть получены с помощью одной катушки измерительного блока 125, при этом портативное устройство 120 располагают в ряде различных местоположений и ориентаций относительно образца 110. Собранные результаты измерения характеристик катушки могут быть переданы на систему 140 создания графика (например, вычислительную систему, запрограммированную на создание графиков электромагнитных характеристик на основании результатов измерения катушки), в которой результаты измерения характеристик катушки могут быть проанализированы для создания трехмерного графика электромагнитных характеристик образца 110, например, трехмерного графика удельной проводимости или трехмерного графика диэлектрической проницаемости образца 110.
В соответствии с конкретными аспектами настоящего изобретения портативное устройство 120 может быть вручную расположено во множестве отдельных местоположений для выполнения измерения характеристик катушки. Например, медицинский работник может вручную разместить портативное устройство 120 с катушкой относительно образца 110 для получения результатов измерения характеристик катушки во множестве отдельных местоположений относительно образца 110.
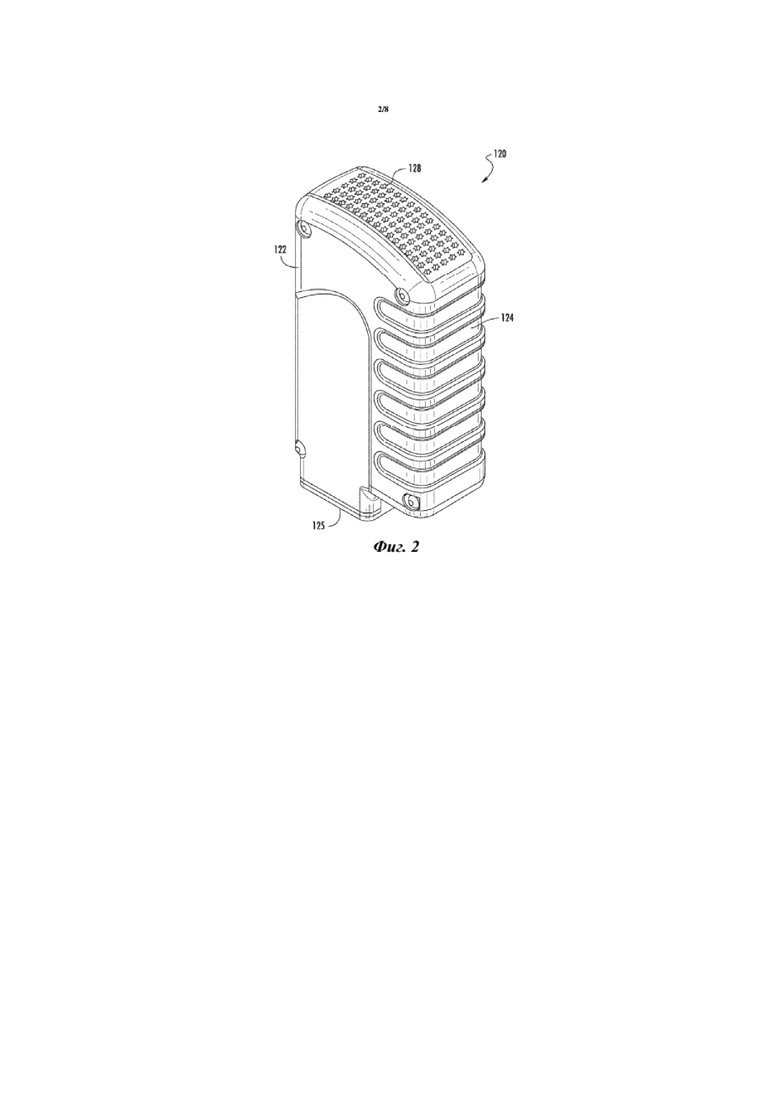
На фиг. 2 изображен вид в перспективе одного примерного варианта осуществления портативного устройства 120 для визуализации методом магнитоиндукционной томографии согласно примерным вариантам осуществления настоящего изобретения. Как показано, портативное устройство 120 содержит корпус 122 для хранения и защиты различных компонентов (например, электрических компонентов) портативного устройства 120, используемых для поддержки сбора результатов измерения катушки с помощью измерительного блока 125.
Примерное портативное устройство 120 по фиг. 2 имеет форм-фактор, способствующий удержанию портативного устройства 120 рукой во время сбора результатов измерения катушки. Например, портативное устройство 120 содержит захватываемую часть 124. Как изображено на фиг. 2, захватываемая часть 124 может содержать одну или несколько канавок или каналов, способствующих захвату или удержанию портативного устройства 120 рукой. Портативное устройство 120 дополнительно имеет такой форм-фактор, что местоположение, в котором рука захватывает корпус при эксплуатации, отнесено на пороговое расстояние от одной катушки измерительного блока 125. Например, захватываемая часть 124 может быть расположена на расстоянии в диапазоне от приблизительно 0,5 дюйма до приблизительно 6 дюймов от измерительного блока 125, например, от приблизительно 2 дюймов до 4 дюймов от измерительного блока, например, приблизительно 3 дюйма от измерительного блока. Таким образом, помехи между рукой специалиста и измерительным блоком 125 могут быть уменьшены при выполнении измерений посредством портативного устройства 120.
Портативное устройство 120 показано с одним примерным форм-фактором согласно примерным вариантам осуществления настоящего изобретения, способствующим удержанию устройства рукой. Средним специалистам в данной области техники, с учетом описания, предоставленного в данном документе, будет понятно, что возможны другие форм-факторы. Например, портативное устройство 120 может иметь корпус, содержащий первую часть, которая имеет первую форму, приспособленную под форму измерительного блока 125, и вторую часть, которая имеет другую форму (например, цилиндрическую форму), которая приспособлена под удержание рукой во время эксплуатации.
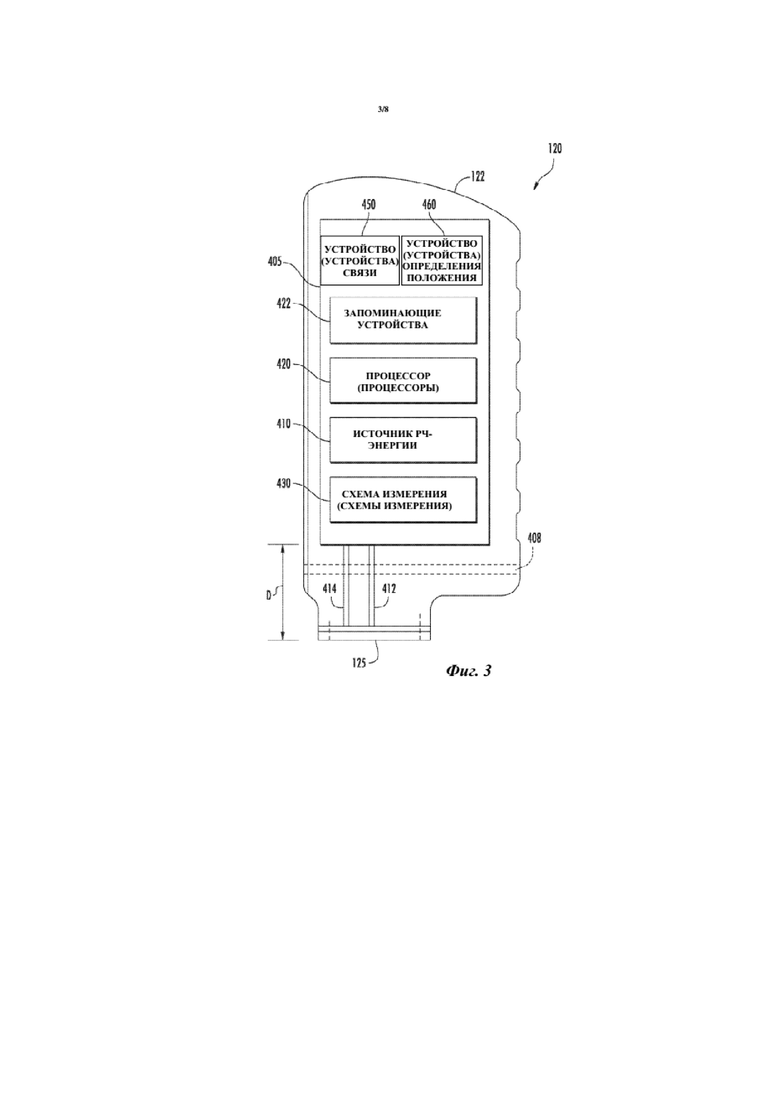
Как показано на фиг. 3, портативное устройство 120 может содержать один или несколько электрических компонентов, поддерживающих эксплуатацию портативного устройства 120. Один или несколько электрических компонентов могут включать источник питания, такой как батарея (не показана), источник 410 РЧ-энергии, процессор (процессоры) 420, запоминающее устройство (запоминающие устройства) 422, схему (схемы) 430 измерения, устройство (устройства) 450 связи и устройство (устройства) 460 определения положения. Работа некоторых из вышеуказанных электрических компонентов будет описана подробнее со ссылкой на фиг. 9 ниже.
Как показано на фиг. 3, источник 410 РЧ-энергии (например, колебательный контур) может быть выполнен с возможностью генерирования РЧ-энергии для возбуждения катушки измерительного блока 125. Процессор (процессоры) 420 может быть выполнен с возможностью управления различными функциями схемы 400, а также обработки информации, полученной схемой 400 (например, информации, полученной схемой 430 измерения). Процессор (процессоры) 420 может включать любое подходящее устройство обработки, такое как цифровой сигнальный процессор, микропроцессор, микроконтроллер, интегральная схема или другое подходящее устройство обработки. Запоминающие устройства 422 могут быть выполнены с возможностью хранения информации и данных, собранных портативным устройством 120. Например, запоминающие устройства 422 могут быть выполнены с возможностью хранения результатов измерения катушки, полученных посредством измерительного блока 125. Запоминающие устройства 422 могут содержать одну или несколько частей из одного или нескольких видов материальных постоянных машиночитаемых носителей, включая без ограничения RAM, ROM, жесткие диски, флеш-диски, оптические носители, магнитные носители или другие запоминающие устройства. Схема 430 измерения может быть выполнена с возможностью получения результатов измерения одной катушки измерительного блока 125. Детали примерной схемы измерения описаны со ссылкой на фиг. 9 ниже.
Устройство (устройства) 460 определения положения по фиг. 3 может содержать схему для поддержки одного или нескольких датчиков, используемых для определения положения и/или ориентации портативного устройства 120 при выполнении измерений катушки. Например, устройство (устройства) 460 определения положения может содержать датчики движения (например, акселерометры, компас, магнитометры, гироскопы и т. п.) и другие подходящие датчики, которые подают сигналы, указывающие на ориентацию портативного устройства 120. Кроме того, портативное устройство 120 может содержать датчики глубины (например, лазерные датчики, инфракрасные датчики, устройства захвата изображений), которые могут использоваться для определения глубины или расстояния от портативного устройства 120 до образца. Сигналы от устройства (устройств) 460 определения положения могут использоваться при определении положения и/или ориентации, связанной с каждым результатом измерения катушки.
Устройство (устройства) 450 связи может использоваться для передачи информации из портативного устройства 120 в удаленное местоположение, например, удаленное вычислительное устройство. Устройство (устройства) связи может содержать, например, передатчики, приемники, порты, контроллеры, антенны или другие подходящие компоненты для передачи информации с портативного устройства 120 по проводной и/или беспроводной сети.
Различные электрические компоненты, поддерживающие эксплуатацию портативного устройства 120, могут быть расположены на печатной плате 405 в корпусе 122 портативного устройства 120. Как изображено на фиг. 3, один или несколько электрических компонентов могут быть отнесены на пороговое расстояние D от измерительного блока 125 для уменьшения помех между одним или несколькими электрическими компонентами и измерительным блоком 125. В конкретных вариантах осуществления пороговое расстояние D может находиться в диапазоне от приблизительно 0,5 дюйма до приблизительно 4 дюймов, например, от приблизительно 2 дюймов до 3 дюймов, например, приблизительно 2 дюйма.
Как показано на фиг. 3, портативное устройство 120 может дополнительно содержать экран 408. Экран 408 может быть изготовлен из проводящего материала или материала, характеризующегося низким коэффициентом потерь и высоким коэффициентом диэлектрической проницаемости. Экран 408 может отделять измерительный блок 125 от электрических компонентов, поддерживающих эксплуатацию портативного устройства 120, для дополнительного уменьшения электромагнитных помех между электрическими компонентами и измерительным блоком 125. Проводящие дорожки 412 и 414, проходящие через экран 408, могут использоваться для передачи сигналов с измерительного блока 125 на электрические компоненты, поддерживающие эксплуатацию портативного устройства 120.
Один или несколько электрических компонентов, поддерживающих эксплуатацию портативного устройства, и другие компоненты системы для магнитоиндукционной томографии могут быть расположены в местоположении, удаленном от портативного устройства 120. Например, как показано на фиг. 1, система 140 создания графика удалена от портативного устройства 120. Система 140 создания графика может быть выполнена с возможностью создания одного или нескольких графиков электромагнитных характеристик на основании результатов измерений, полученных портативным устройством 120, как будет подробнее описано ниже. Система 120 создания графика может быть расположена на подвижной тележке 170 или другом устройстве, чтобы сделать систему 120 создания графика переносной. Портативное устройство 120 может быть выполнено с возможностью поддержания связи с системой 140 создания графика по интерфейсу 122 связи. Интерфейс 122 связи может представлять собой любой подходящий проводной или беспроводной интерфейс, или комбинацию проводной и беспроводной линий связи.
Для создания точного трехмерного графика электромагнитных характеристик образца 110 данные о положении должны быть связаны с результатами измерения характеристик катушки, полученными портативным устройством 120. Данные о положении могут указывать положение (например, определенное по оси x, оси y и оси z относительно образца 110) катушки 125, а также ориентацию катушки 125 (например, угол (углы) наклона относительно образца 110). Система 100 для магнитоиндукционной томографии согласно примерным вариантам осуществления настоящего изобретения содержит систему определения положения для определения данных о положении, связанных с результатами измерения, полученными портативным устройством 120.
Одна примерная система определения положения в соответствии с аспектами настоящего изобретения содержит оптическую систему определения положения. Например, система определения положения может содержать по меньшей мере одну камеру 135, расположенную над образцом 110. Камера 135 может быть выполнена с возможностью захвата изображений портативного устройства 120, когда портативное устройство 120 получает результаты измерения образца 110. Камера может захватывать изображения на разных длинах волн или в разных спектрах, включая одну или несколько длин волн в ультрафиолетовой, инфракрасной или видимой части спектра.
Изображения, захваченные камерой 135, могут быть обработаны для определения положения портативного устройства 120 и измерительного блока 125. В некоторых вариантах осуществления портативное устройство 120 также может содержать графический символ, расположенный на поверхности устройства 120 с катушкой. Один примерный графический символ 128 показан на фиг. 2. После осуществления множества измерений характеристик катушки устройство 135 захвата изображений может захватывать изображения графического символа 128. Изображения могут быть обработаны для определения положения портативного устройства 120 на основании положения графического символа на изображениях. В конкретных реализациях камера 135 может содержать телецентрическую линзу для уменьшения ошибки параллакса. Для определения положения портативного устройства 120 могут использоваться другие подходящие оптические системы определения положения, например, инфракрасные системы, лазерные системы или другие подходящие системы.
Например, в одном варианте осуществления портативное устройство 120 содержит отражающие маркеры, которые прикреплены к наружной части портативного устройства 120. Отражающие маркеры могут быть выполнены с возможностью отражения видимого излучения, ультрафиолетового излучения, инфракрасного излучения или другого подходящего излучения. Портативное устройство 120 может иметь такой форм-фактор, что отражающие маркеры поддерживаются в пределах зоны видимости камеры 135 во время эксплуатации. Например, отражающие маркеры могут быть расположены на поверхности, противоположной измерительному блоку 125, вследствие чего отражающие маркеры находятся в пределах зоны прямой видимости камеры 135 при выполнении измерений посредством портативного устройства 120. В одном варианте осуществления отражающие маркеры расположены на оси, которая параллельна оси, связанной с измерительным блоком 125. Отражающие маркеры могут быть расположены на поверхности портативного устройства 120, которая расположена на наибольшем расстоянии от измерительного блока 125.
Камера 135 может захватывать изображения портативного устройства 120. Система определения положения может определять местоположение портативного устройства по меньшей мере частично на основании местоположения отражающих маркеров на изображениях портативного устройства 120, захваченных камерой 135.
В некоторых вариантах осуществления система определения положения может содержать электромагнитную систему определения положения. Например, система определения положения может содержать низкочастотную (Pohemus) систему определения положения и/или радиолокационную (UHF) систему определения положения. В некоторых вариантах осуществления система определения положения может содержать акустическую систему определения положения, такую как гидроакустическая система определения положения.
В некоторых вариантах осуществления портативное устройство 120 может содержать один или несколько датчиков движения (например, трехосный акселерометр, гироскоп и/или другие датчики движения) и/или один или несколько датчиков глубины. Ориентация одной катушки 125 относительно поверхности может быть определена с помощью сигналов от датчика (датчиков) движения. Например, сигналы от трехосного акселерометра могут быть использованы для определения ориентации измерительного блока 125 во время измерения характеристик катушки. Может быть использован датчик (датчики) глубины для определения расстояния от одной катушки до образца 110 (например, положение по оси z). Датчик (датчики) глубины может содержать одно или несколько устройств, выполненных с возможностью определения местоположения измерительного блока 125 относительно поверхности. Например, датчик (датчики) глубины может содержать один или несколько лазерных датчиков и/или акустических датчиков расположения. В другой реализации датчик (датчики) глубины может содержать одну или несколько камер, выполненных с возможностью захвата изображений образца 110. Изображения могут быть обработаны для определения глубины до образца 110, например, с помощью технологий «структура из движения».
Система 140 создания графика может принимать результаты измерения характеристик катушки вместе с данными о местоположении и ориентации катушки и может обрабатывать данные для создания трехмерного графика электромагнитных характеристик образца 110. Система 140 создания графика на фиг. 1 показана как расположенная на расстоянии от портативного устройства 120. Однако в других вариантах осуществления система 140 создания графика может представлять собой часть портативного устройства 120.
Система 140 создания графика может содержать одно или несколько вычислительных устройств, например, одно или несколько из настольного компьютера, портативного компьютера, сервера, мобильного устройства, дисплея с одним или несколькими процессорами, или другое подходящее вычислительное устройство, имеющее один или несколько процессоров и одно или несколько запоминающих устройств. Система 140 создания графика может быть реализована с помощью одного или нескольких сетевых компьютеров (например, в кластере или другой распределенной вычислительной системе). Например, система 140 создания графика может быть связана с одним или несколькими удаленными устройствами 160 (например, с помощью проводного или беспроводного соединения или сети).
Вычислительная система 140 содержит один или несколько процессоров 142 и одно или несколько запоминающих устройств 144. Один или несколько процессоров 142 могут включать любое подходящее устройство обработки, такое как микропроцессор, микроконтроллер, интегральная схема или другое подходящее устройство обработки. Запоминающие устройства 144 могут содержать одну или несколько частей из одного или нескольких видов материальных постоянных машиночитаемых носителей, включая без ограничения RAM, ROM, жесткие диски, флеш-диски, оптические носители, магнитные носители или другие запоминающие устройства. Система 140 создания графика также может содержать одно или несколько устройств 162 ввода (например, клавиатуру, мышь, сенсорный экран, сенсорную панель, микрофон и т. д.) и одно или несколько устройств 164 вывода (например, дисплей, громкоговорители и т. д.).
Запоминающие устройства 144 могут хранить команды 146, которые при их исполнении одним или несколькими процессорами 142 вызывают выполнение операций одним или несколькими процессорами 142. Система 140 создания графика может быть приспособлена для работы в качестве специализированной машины, обеспечивающей необходимые функциональные возможности путем получения доступа к командам 146. Команды 146 могут быть реализованы в аппаратном обеспечении или программном обеспечении. При использовании программного обеспечения может быть использован любой подходящий язык программирования, язык сценариев или другой тип языка или комбинации языков для реализации идей, описанных в данном документе.
Как показано, запоминающие устройства 144 могут хранить команды 146, которые при их исполнении одним или несколькими процессорами 142 вызывают реализацию одним или несколькими процессорами 142 модуля 148 магнитоиндукционной томографии («MIT»). Модуль 148 MIT может быть выполнен с возможностью реализации одного или нескольких способов визуализации методом магнитоиндукционной томографии, описанных в данном документе, с помощью одной катушки, например, способа, показанного на фиг. 10.
Одно или несколько запоминающих устройств 144 по фиг. 1 также могут хранить данные, такие как результаты измерения характеристик катушки, данные о положении, трехмерные графики электромагнитных характеристик и другие данные. Как показано, одно или несколько запоминающих устройств 144 могут хранить данные, связанные с аналитической моделью 150. Аналитическая модель 150 может определять отношение между результатами измерения характеристик катушки, полученными с помощью одной катушки, и распределением электромагнитных характеристик образца 110. Особенности примерной аналитической модели будут описаны ниже более подробно.
Модуль 148 MIT может быть выполнен с возможностью приема входных данных из устройства 162 ввода, из устройства 120 с катушкой, из системы определения положения, из данных, хранящихся в одном или нескольких запоминающих устройствах 144, или других источников. Затем модуль 148 MIT может анализировать такие данные в соответствии с описанными способами и предоставлять пользователю пригодные к использованию выходные данные, такие как трехмерные графики электромагнитных характеристик, посредством устройства 164 вывода. Альтернативно, анализ может быть реализован посредством одного или нескольких удаленных устройств 160.
Технология, описанная в данном документе, относится к вычислительным системам, серверам, базам данных, программным приложениям и другим системам на основе компьютеров, а также предпринимаемым действиям и информации, отправленной на указанные системы и от них. Среднему специалисту в данной области техники с учетом описания, предоставленного в данном документе, будет понятно, что гибкость, свойственная системам на основе компьютеров, предусматривает значительное разнообразие возможных конфигураций, комбинаций, решений задач и функциональных возможностей среди компонентов. Например, процессы, описанные в данном документе, могут быть реализованы с помощью одного вычислительного устройства или нескольких вычислительных устройств, работающих совместно. Базы данных и приложения могут быть реализованы в одной системе или распределены среди нескольких систем. Распределенные компоненты могут работать последовательно или параллельно.
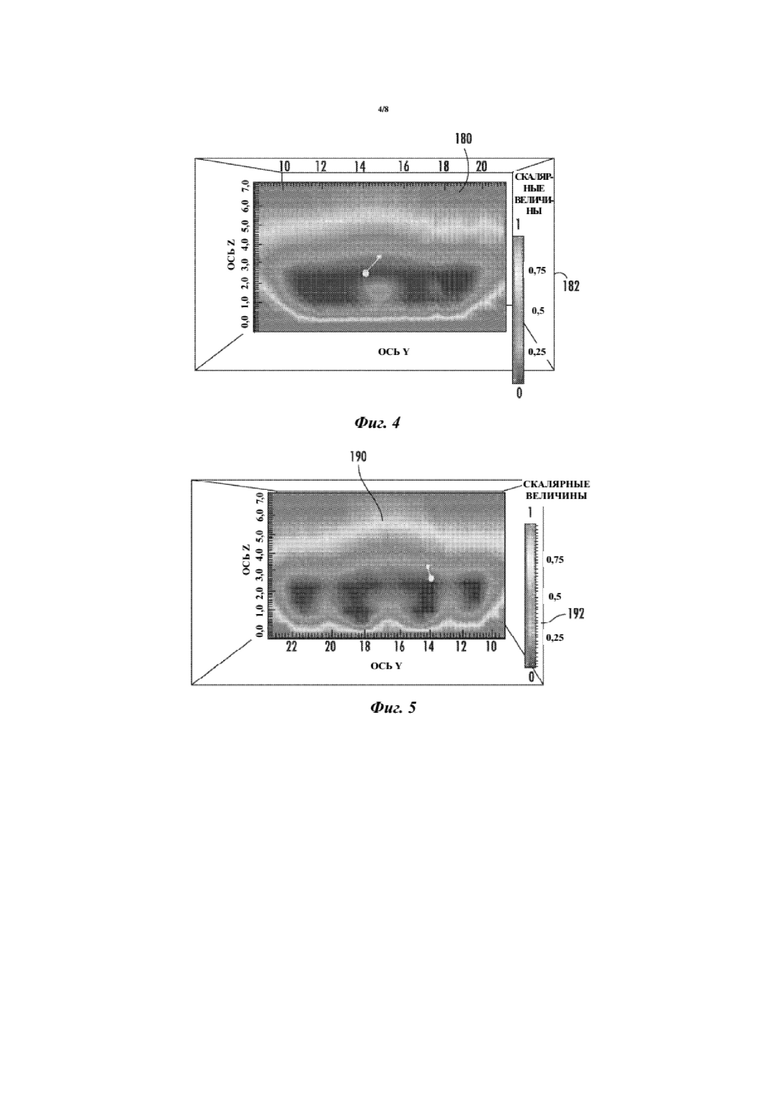
На фиг. 4 изображен один примерный график 180 удельной проводимости, который может быть создан системой 100 из множества результатов измерения характеристик катушки с помощью портативного устройства согласно примерному варианту осуществления настоящего изобретения. График 180 удельной проводимости может обеспечивать двухмерный вид поперечного сечения трехмерного графика удельной проводимости, созданного модулем 148 MIT по фиг. 1 на основании результатов измерения, полученных с помощью портативного устройства 120. График 180 удельной проводимости по фиг. 4 может быть представлен, например, на устройстве 164 вывода вычислительной системы 140 по фиг. 1.
График 180 удельной проводимости по фиг. 4 представляет вид в поперечном сечении позвоночника пациента, пересекающий и показывающий позвоночный канал. На графике 180 удельной проводимости отображено распределение удельной проводимости по осям x, y и z с такими единицами измерения, как сантиметры. График 180 удельной проводимости содержит шкалу 182, указывающую тона по шкале серого, соответствующие варьирующим степеням удельной проводимости в таких единицах измерения, как См/м. Как показано, график 180 удельной проводимости отображает отличающиеся значения удельной проводимости участков ткани человека в области позвоночника и может предоставлять изображение области позвоночника пациента.
На фиг. 5 изображен другой примерный график 190 удельной проводимости, который может быть создан системой 100 из множества результатов измерения характеристик катушки с помощью одной катушки согласно примерным вариантам осуществления настоящего изобретения. График 190 удельной проводимости может представлять собой двухмерный вид поперечного сечения трехмерного графика удельной проводимости, созданного модулем 148 MIT по фиг. 1 на основании результатов измерения, полученных с помощью портативного устройства 120. График 190 удельной проводимости по фиг. 5 может быть представлен, например, на устройстве 164 вывода вычислительной системы 140 по фиг. 1.
График 190 удельной проводимости по фиг. 5 представляет сагиттальный вид области позвоночника пациента, выполненный со смещением параллельно позвоночнику. На графике 190 удельной проводимости отображено распределение удельной проводимости по осям x, y и z с такими единицами измерения, как сантиметры. График 190 удельной проводимости содержит шкалу 192, указывающую тона по шкале серого, соответствующие варьирующим степеням удельной проводимости в таких единицах измерения, как См/м. Как показано, график 190 удельной проводимости отображает отличающиеся значения удельной проводимости участков ткани человека в области позвоночника и может предоставлять изображение области позвоночника пациента. Данный разрез пересекает и показывает структуру, связанную с соединением ребер с поперечными отростками позвонков. График 180 удельной проводимости и график 190 удельной проводимости, вместе с другими видами, могут предоставлять различные изображения области позвоночника пациента для диагностики и других целей.
Примерная количественная аналитическая модель для одной катушки
Далее будет описана примерная количественная аналитическая модель для получения трехмерного графика удельной проводимости из множества результатов измерения характеристик катушки, полученных с помощью портативного устройства. Количественная модель разработана для произвольного распределения удельной проводимости, но при этом диэлектрическая проницаемость и магнитная проницаемость рассматриваются как пространственно однородные. Количественная аналитическая модель была разработана для геометрии катушки, содержащей множество концентрических круглых витков, все из которых лежат в общей плоскости и соединены последовательно, причем считается, что переходный ток имеет одинаковые значения во всех точках на витках. Допускается произвольное изменение в пространстве распределения удельной проводимости, при этом раствор для электрического поля ограничен небольшой удельной проводимостью (<10 См/м). Предполагается сохранение условий с отсутствием заряда, в результате чего считается, что электрическое поле имеет нулевую дивергенцию. При этих условиях поля возникают только в результате действия внешних и вихревых токов.
Количественная аналитическая модель может устанавливать взаимоотношение между изменением действительной части импеданса (например, омическими потерями) катушки и различными параметрами, включая распределение удельной проводимости образца, положение и ориентацию одной катушки относительно образца, геометрию катушки (например, радиус каждого из множества концентрических проводящих витков) и другие параметры. Одна примерная модель приведена ниже:

-Zre — результат измерения характеристик катушки (например, действительная часть потерь импеданса катушки). µ — магнитная проницаемость в свободном пространстве. ω — частота возбуждения катушки. ρk и ρj — радиусы каждого проводящего витка j и k для каждой пары взаимодействующих витков j,k. Функция Q1/2 известна как кольцевая функция или тороидальная гармоническая функция, имеющая аргумент ηj и ηk, как показано далее:

Со ссылкой на систему координат, расположенную в центре концентрических витков, так что все витки лежат в пределах плоскости XY, ρ обозначает радиальное расстояние от оси катушки до точки в образце, при этом z обозначает расстояние от плоскости катушки до той же точки в образце.
Модель вводит электрическую удельную проводимость  как функцию от положения. Интегралы могут быть вычислены с помощью сетки конечных элементов (например, с четырехгранными элементами) с целью создания распределения удельной проводимости для множества результатов измерения характеристик катушки, как будет более подробно описано ниже.
как функцию от положения. Интегралы могут быть вычислены с помощью сетки конечных элементов (например, с четырехгранными элементами) с целью создания распределения удельной проводимости для множества результатов измерения характеристик катушки, как будет более подробно описано ниже.
Примерные конструкции катушки для визуализации методом магнитоиндукционной томографии
Далее будет описана примерная конструкция катушки, которая приблизительно соответствует катушке, предусматриваемой примерной количественной моделью. Катушка согласно примерным аспектам настоящего изобретения может содержать множество концентрических проводящих витков, расположенных в двух плоскостях на многослойной печатной плате. Множество концентрических проводящих витков может включать множество первых концентрических проводящих витков, расположенных в первой плоскости, и множество вторых концентрических проводящих витков, расположенных во второй плоскости. Вторая плоскость может быть отделена от первой плоскости расстоянием между плоскостями. Расстояние между плоскостями может быть выбрано таким образом, что катушка приблизительно соответствует катушке, находящейся в одной плоскости, предусматриваемой в примерной количественной аналитической модели для визуализации методом магнитоиндукционной томографии, описанной в данном документе.
Кроме того, множество проводящих витков могут быть соединены последовательно с помощью множества соединительных дорожек. Множество соединительных дорожек могут быть расположены таким образом, что может быть уменьшено их влияние на поля, генерируемые соединительными дорожками. Таким образом, катушка согласно примерным аспектам настоящего изобретения может иметь характеристики, которые приблизительно соответствуют множеству круглых витков, расположенных концентрично относительно друг друга и в одной плоскости.
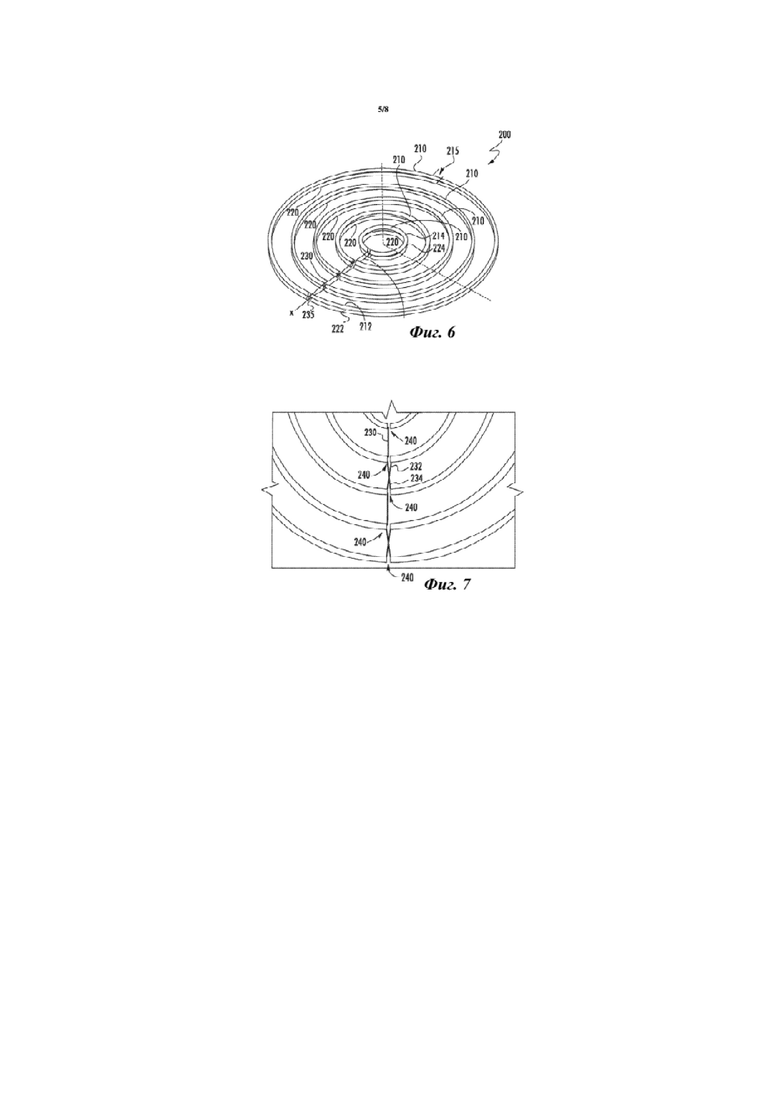
На фиг. 6 изображена примерная катушка 200, применяемая для визуализации методом магнитоиндукционной томографии согласно примерным аспектам настоящего изобретения. Как показано, катушка 200 содержит десять концентрических проводящих витков. Более конкретно, катушка 200 содержит пять первых концентрических проводящих витков 210, расположенных в первой плоскости, и пять вторых концентрических проводящих витков 220, расположенных во второй плоскости. Первые и вторые концентрические проводящие витки 210 и 220 могут представлять собой медные дорожки размером 1 мм или 0,5 мм на многослойной печатной плате. В одном примере реализации радиусы пяти концентрических проводящих витков в каждой плоскости равны приблизительно 4 мм, 8 мм, 12 мм, 16 мм и 20 мм соответственно. Другие подходящие размеры и промежуток могут быть выбраны без отхода от объема настоящего изобретения.
Как показано, каждый из множества первых концентрических проводящих витков 210 расположен таким образом, что он перекрывает один из множества вторых концентрических проводящих витков 220. Кроме того, первые концентрические проводящие витки 210 и вторые концентрические проводящие витки 220 могут быть разделены расстоянием между плоскостями. Расстояние между плоскостями может быть выбрано таким образом, что катушка 200 приблизительно соответствует одной плоскости концентрических витков, как предусматривается количественной аналитической моделью. Например, расстояние между плоскостями может находиться в диапазоне от приблизительно 0,2 мм до приблизительно 0,7 мм, например, приблизительно 0,5 мм.
Множество первых проводящих витков 210 может содержать первый наиболее близкий к центру проводящий виток 214. Первый наиболее близкий к центру проводящий виток 214 может быть соединен с источником РЧ-энергии. Множество вторых проводящих витков 220 может содержать второй наиболее близкий к центру проводящий виток 224. Второй наиболее близкий к центру проводящий виток 224 может быть соединен с опорным узлом (например, узлом заземления или общим узлом).
Катушка также содержит множество соединительных дорожек 230, применяемых для последовательного соединения первых концентрических проводящих витков 210 и вторых концентрических проводящих витков 220. Более конкретно, соединительные дорожки 230 последовательно соединяют множество первых концентрических проводящих витков 210 друг с другом и могут последовательно соединять множество вторых концентрических проводящих витков 220 друг с другом. Соединительные дорожки 230 также могут содержать соединительную дорожку 235, которая последовательно соединяет самый крайний первый концентрический проводящий виток 212 с самым крайним вторым концентрическим проводящим витком 214.
Как более подробно показано на фиг. 7, соединительные дорожки 230 могут быть расположены таким образом, что поля, излучаемые соединительными дорожками, противодействуют друг другу. Более конкретно, соединительные дорожки 230 могут быть выровнены в радиальном направлении таким образом, что направление протекания тока одной из множества соединительных дорожек, расположенных в первой плоскости, противоположно направлению протекания тока одной из множества соединительных дорожек, расположенных во второй плоскости. Например, как показано на фиг. 7, соединительная дорожка 232, расположенная в первой плоскости, может быть практически выровнена в радиальном направлении с соединительной дорожкой 234 во второй плоскости. Направление тока, протекающего в соединительной дорожке 232, может быть противоположным направлению тока, протекающего в соединительной дорожке 234, вследствие чего поля, генерируемые соединительными дорожками 232 и 234, противодействуют или нейтрализуют друг друга.
Как дополнительно изображено на фиг. 7, каждый из множества первых проводящих витков 210 и вторых проводящих витков 220 может содержать зазор 240, способствующий соединению проводящих витков с помощью соединительных дорожек 230. Зазор может находиться в диапазоне от приблизительно 0,2 мм до приблизительно 0,7 мм, например, приблизительно 0,5 мм.
Зазоры 240 могут быть смещены друг относительно друга, способствуя последовательному соединению множества концентрических проводящих витков 210 и 220. Например, зазор, соответствующий одному из множества первых концентрических проводящих витков 210, может быть смещен относительно зазора, соответствующего другому из множества первых концентрических проводящих витков 210. Аналогично, зазор, соответствующий одному из множества вторых концентрических проводящих витков 220, может быть смещен относительно зазора, соответствующего другому из множества вторых концентрических проводящих витков 220. Зазор, соответствующий одному из первых концентрических проводящих витков 210, также может быть смещен относительно зазора, соответствующего одному из множества вторых концентрических проводящих витков 220. Смещенные зазоры могут не располагаться на одной и той же оси, соответствующей катушке 200.
Катушка 200 по фиг. 6 и 7 может обеспечивать хорошее приближение катушки, предусматриваемой количественной аналитической моделью для визуализации методом магнитоиндукционной томографии. Таким образом, результаты измерения характеристик катушки с помощью катушки 200 могут быть использованы для создания трехмерных графиков электромагнитных характеристик образцов, представляющих интерес (например, образцов ткани человека).
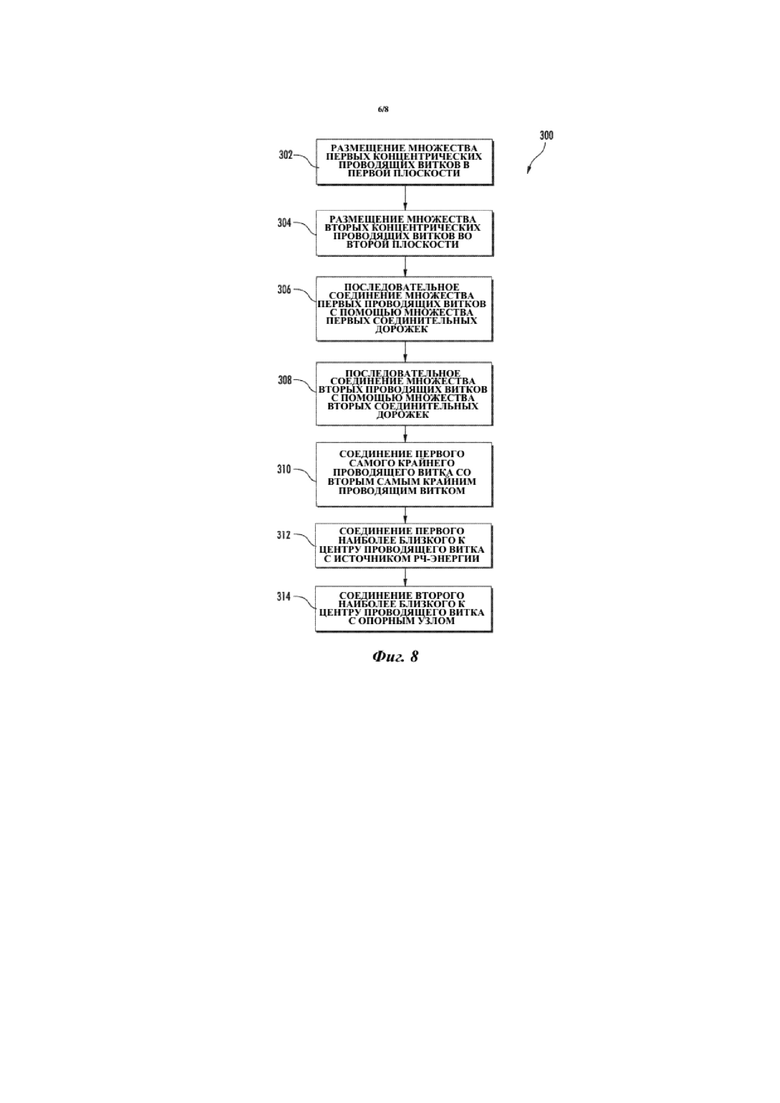
На фиг. 8 изображена блок-схема последовательности этапов выполнения примерного способа (300) создания катушки для визуализации методом магнитоиндукционной томографии согласно примерным аспектам настоящего изобретения. На фиг. 8 в целях иллюстрации и пояснения изображены этапы, выполняемые в определенном порядке. Средним специалистам в данной области техники с учетом описания, предоставленного в данном документе, будет понятно, что этапы любого из способов, описанных в данном документе, могут быть модифицированы, исключены, перегруппированы, адаптированы или развернуты различными путями без отхода от объема настоящего изобретения.
На этапе (302) множество первых концентрических проводящих витков размещают в первой плоскости. Например, множество первых концентрических проводящих витков 210 катушки 200 по фиг. 6 размещают на первой плоскости многослойной печатной платы. На этапе (304) по фиг. 8 множество вторых концентрических проводящих витков размещают во второй плоскости. Например, множество вторых концентрических проводящих витков 220 по фиг. 6 размещают на второй плоскости многослойной печатной платы.
Первая плоскость и вторая плоскость могут быть разделены расстоянием между плоскостями. Расстояние между плоскостями может быть выбрано таким образом, что катушка приблизительно соответствует одной плоскости концентрических проводящих витков в аналитической модели для магнитоиндукционной томографии, описанной в данном документе. Например, расстояние между плоскостями может быть выбрано в диапазоне от приблизительно 0,2 мм до приблизительно 0,7 мм.
На этапе (306) множество первых концентрических проводящих витков последовательно соединяют с помощью множества первых соединительных дорожек в первой плоскости. На этапе (308) на фиг. 8 множество вторых концентрических проводящих витков последовательно соединяют с помощью множества вторых соединительных дорожек во второй плоскости. Соединительные дорожки могут быть выровнены в радиальном направлении таким образом, что поля, генерируемые соединительными дорожками, противодействуют друг другу. Например, соединительные дорожки могут быть размещены таким образом, что множество первых соединительных дорожек и множество вторых соединительных дорожек выровнены в радиальном направлении для последовательного соединения множества первых концентрических проводящих витков и множества вторых концентрических проводящих витков таким образом, что направление протекания тока одной из множества первых соединительных дорожек противоположно направлению протекания тока одной из множества вторых соединительных дорожек.
На этапе (308) способ может включать соединение первого самого крайнего проводящего витка, расположенного в первой плоскости, со вторым самым крайним проводящим витком во второй плоскости таким образом, что множество первых концентрических проводящих витков и множество вторых концентрических проводящих витков соединены последовательно. Например, как показано на фиг. 6, первый самый крайний проводящий виток 212 может быть последовательно соединен со вторым самым крайним проводящим витком 222.
На этапе (310) по фиг. 8 способ может включать соединение первого наиболее близкого к центру проводящего витка с источником РЧ-энергии. Например, как показано на фиг. 6, наиболее близкий к центру проводящий виток 214 из множества первых концентрических проводящих витков 210 может быть соединен с источником РЧ-энергии. На этапе (312) по фиг. 8 второй наиболее близкий к центру проводящий виток может быть соединен с опорным узлом (например, узлом заземления или общим узлом). Например, как показано на фиг. 6, наиболее близкий к центру проводящий виток 224 из множества вторых концентрических проводящих витков 220 может быть соединен с опорным узлом.
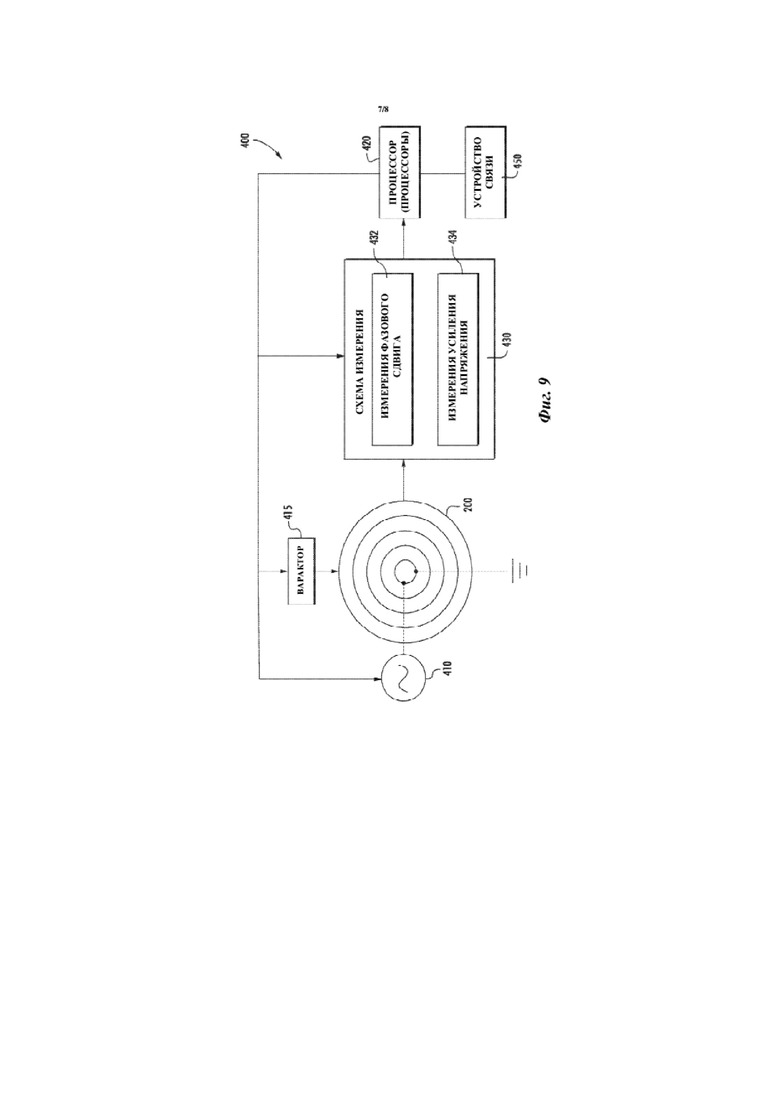
Примерная схема для получения результатов измерения характеристик катушки
На фиг. 9 изображена примерная схема 400, которая может применяться для получения результатов измерения характеристик катушки с помощью катушки 200 по фиг. 6 и 7. Как показано, схема 400 по фиг. 9 содержит источник 410 РЧ-энергии (например, колебательный контур), выполненный с возможностью возбуждения катушки 200 РЧ-энергией. Источник 410 РЧ-энергии может представлять собой кварцевый генератор с фиксированной частотой, выполненный с возможностью подачи РЧ-энергии на фиксированной частоте на катушку 200. Фиксированная частота может составлять, например, приблизительно 12,5 МГц. В одном примерном варианте осуществления источник 410 РЧ-энергии может быть соединен с наиболее близким к центру концентрическим проводящим витком из множества первых концентрических проводящих витков катушки 200. Наиболее близкий к центру концентрический проводящий виток из множества вторых концентрических проводящих витков катушки 200 может быть соединен с опорным узлом (например, общим узлом или узлом заземления).
Схема 400 может содержать один или несколько процессоров 420 для управления различными функциями схемы 400, а также для обработки информации, полученной схемой 400 (например, информации, полученной схемой 430 измерения). Один или несколько процессоров 420 могут включать любое подходящее устройство обработки, такое как цифровой сигнальный процессор, микропроцессор, микроконтроллер, интегральная схема или другое подходящее устройство обработки.
Один или несколько процессоров 420 могут быть выполнены с возможностью управления различными компонентами схемы 400 с целью сбора результатов измерения потерь в катушке с помощью катушки 200. Например, один или несколько процессоров 420 могут управлять варактором 415, соединенным параллельно с катушкой 200, для введения катушки 200 в резонанс или почти резонанс после размещения катушки 200 рядом с образцом для измерения характеристик катушки. Один или несколько процессоров 420 также могут управлять схемой 430 измерения для получения результатов измерения характеристик катушки после размещения катушки 200 рядом с образцом.
Схема 430 измерения может быть выполнена с возможностью получения результатов измерения характеристик катушки с помощью катушки 200. Результаты измерения характеристик катушки могут указывать потери в катушке 200, возникающие в результате действия вихревых токов, индуцированных в образце. В одной реализации схема 430 измерения может быть выполнена с возможностью измерения действительной части изменений полной проводимости катушки 200. Действительная часть изменений полной проводимости катушки 200 может быть преобразована в действительную часть изменений импеданса катушки 200 как значение, обратное полной проводимости, в целях аналитической модели.
Полная проводимость катушки 200 может быть измерена несколькими путями. В одном варианте осуществления схема 430 измерения измеряет полную проводимость с помощью схемы 432 измерения фазового сдвига и схемы 434 измерения усиления напряжения. Например, схема 430 измерения может содержать измеритель фазы и усиления AD8302, доступный от Analog Devices. Схема 432 измерения фазового сдвига может измерять фазовый сдвиг между током и напряжением, связанный с катушкой 200. Схема 434 измерения усиления напряжения может измерять отношение напряжения на катушке 200 к напряжению измерительного резистора, последовательно соединенного с катушкой 200. Полная проводимость катушки 200 может быть определена (например, с помощью одного или нескольких процессоров 420) на основании фазы и усиления катушки 200, полученных с помощью схемы 430 измерения.
После получения результатов измерения характеристик катушки один или несколько процессоров 420 могут сохранять результаты измерения характеристик катушки, например, в запоминающее устройство. Один или несколько процессоров 420 также могут передавать результаты измерения характеристик катушки одному или нескольким удаленным устройствам с целью обработки для создания трехмерного графика электромагнитных характеристик образца с помощью устройства 440 связи. Устройство 440 связи может содержать любой подходящий интерфейс или устройство для передачи информации на удаленное устройство посредством проводных или беспроводных соединений и/или сетей.
Примерные способы визуализации методом магнитоиндукционной томографии
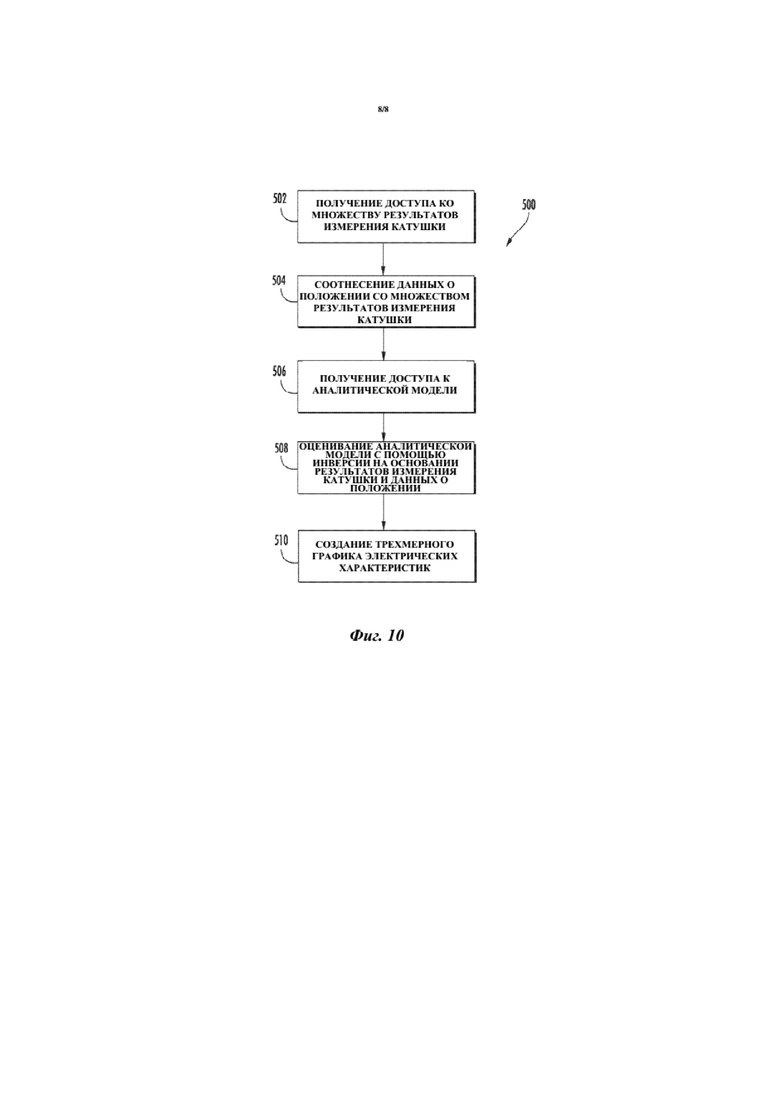
На фиг. 10 изображена блок-схема последовательности этапов выполнения примерного способа (500) визуализации методом магнитоиндукционной томографии согласно примерным аспектам настоящего изобретения. Способ (500) может быть реализован с помощью одного или нескольких вычислительных устройств, например, одного или нескольких вычислительных устройств системы 140 создания графика, изображенной на фиг. 1. Кроме того, на фиг. 10 в целях иллюстрации и пояснения изображены этапы, выполняемые в определенном порядке. Средним специалистам в данной области техники с учетом описания, предоставленного в данном документе, будет понятно, что этапы любого из способов, описанных в данном документе, могут быть модифицированы, исключены, перегруппированы, адаптированы или развернуты различными путями без отхода от объема настоящего изобретения.
На этапе (502) способ может включать получение доступа ко множеству результатов измерения характеристик катушки, полученных с помощью портативного устройства во множестве различных отдельных местоположений относительно образца. Например, множество результатов измерения характеристик катушки могут быть доступны из запоминающего устройства или могут быть приняты из устройства с катушкой, имеющего одну катушку, выполненного с возможностью получения результатов измерения характеристик катушки. Результаты измерения характеристик катушки могут представлять собой результаты измерения потерь в катушке, полученные с помощью одной катушки после возбуждения одной катушки РЧ-энергией и ее размещения рядом с образцом в одном из множества отдельных местоположений.
В одной реализации одна катушка может содержать множество концентрических проводящих витков. Например, одна катушка может иметь множество первых концентрических проводящих витков, размещенных в первой плоскости, и множество вторых концентрических проводящих витков, размещенных во второй плоскости. Множество концентрических проводящих витков могут быть соединены с помощью соединительных дорожек, размещенных таким образом, чтобы оказывать меньшее влияние на поле, созданное катушкой. Например, одна катушка может иметь геометрию катушки 200, изображенную на фиг. 6 и 7.
Результаты измерения характеристик катушки могут быть получены во множестве отдельных положений относительно образца. Каждый результат измерения характеристик катушки может быть взят в отличном отдельном положении относительно образца. Большее количество результатов измерения характеристик катушки может привести к повышенной точности при создании трехмерного графика электромагнитных характеристик из результатов измерения характеристик катушки.
В одном конкретном варианте осуществления результаты измерения характеристик катушки могут включать множество различных наборов данных результатов измерения характеристик катушки. Каждый из наборов данных может быть создан путем проведения множества измерений характеристик катушки с помощью одной катушки. Одна катушка может быть разной для каждого набора данных. Например, каждый набор данных может быть связан с одной катушкой, имеющей отличный общий размер и/или внешний диаметр относительно любой из других одних катушек, связанных с другими наборами данных. Наборы данных могут быть получены в различные моменты времени. Наборы данных могут быть совместно обработаны согласно примерным аспектам настоящего изобретения для создания трехмерного графика распределения электрических характеристик образца, как описано ниже.
На этапе (504) по фиг. 10 способ включает соотнесение данных о положении с каждым из множества результатов измерения характеристик катушки. Данные о положении для каждого результата измерения характеристик катушки могут указывать положение и/или ориентацию одной катушки относительно образца после осуществления измерения характеристик катушки. Данные о положении могут быть связаны с каждым результатом измерения характеристик катушки, например, в запоминающем устройстве вычислительной системы.
Данные о положении могут быть получены несколькими путями. В одной реализации данные о положении могут быть получены для каждого результата измерения из данных, связанных с системой определения положения, выполненной с возможностью определения положения и/или ориентации портативного устройства, когда портативное устройство используется для получения результатов измерения. Кроме того, сигналы от одного или нескольких датчиков (например, одного или нескольких датчиков движения и одного или нескольких датчиков глубины), связанных с портативным устройством, также могут применяться для определения данных о положении для измерения характеристик катушки.
На этапе (506) способ включает получение доступа к аналитической модели, определяющей отношение между результатами измерения характеристик катушки, полученными с помощью одной катушки, и электромагнитной характеристикой образца. Например, аналитическая модель может быть доступна, например, из запоминающего устройства. В одной конкретной реализации аналитическая модель устанавливает взаимоотношение между изменением импеданса одной катушки, имеющей множество концентрических проводящих витков, и распределением удельной проводимости образца. Более конкретно, аналитическая модель может устанавливать взаимоотношение между изменением импеданса одной катушки и рядом параметров. Параметры могут включать распределение удельной проводимости образца, положение и ориентацию, связанные с каждым результатом измерения потерь в катушке, и геометрию катушки (например, радиус каждого из концентрических проводящих витков). Подробная информация относительно примерной количественной модели была предоставлена в описании примерной количественной аналитической модели для одной катушки, описанной выше.
На этапе (508) способ включает оценивание аналитической модели на основании множества результатов измерения характеристик катушки и соответствующих данных о положении. Более конкретно, может быть выполнена инверсия с помощью модели для определения распределения удельной проводимости, которое наиболее точно приводит к множеству полученных результатов измерения характеристик катушки. В одном примерном аспекте инверсия может быть выполнена путем дискретизации образца в сетку конечных элементов. Сетка конечных элементов может содержать множество многогранных элементов, таких как четырехгранные элементы. Форма и разрешение сетки конечных элементов могут быть адаптированы под анализируемый образец. Для практических целей данные о местоположении катушки могут быть использованы для того, чтобы предотвратить построение сетки конечных элементов тех участков пространства, в которых находилась катушка, тем самым улучшая эффективность. После создания сетки конечных элементов для образца распределение удельной проводимости для сетки конечных элементов может быть рассчитано с помощью нелинейного метода наименьших квадратов или метода наименьших квадратов с ограничениями.
Более конкретно, множество возможных распределений электромагнитных характеристик может быть рассчитано для сетки конечных элементов. Каждое из этих возможных распределений электромагнитных характеристик может быть оценено с помощью функции затрат или целевой функции, такой как среднеквадратическая погрешность. Функция затрат или целевая функция может присваивать затраты каждому возможному распределению электромагнитных характеристик по меньшей мере частично на основании разницы между полученными результатами измерения характеристик катушки и теоретическими результатами измерения характеристик катушки с помощью модели. Возможное распределение электромагнитных характеристик с наименьшими затратами может быть выбрано в качестве распределения электромагнитных характеристик для образца. Среднему специалисту в данной области техники с учетом описания, предоставленного в данном документе, будет понятно, что могут быть использованы другие подходящие методики для определения распределения электромагнитных характеристик с помощью аналитической модели без отхода от объема настоящего изобретения.
На этапе (510) может быть создан трехмерный график электромагнитных характеристик на основании распределения электромагнитных характеристик, идентифицированного с помощью алгоритма инверсии. Трехмерный график характеристик может представлять распределение электромагнитных характеристик (например, распределение удельной проводимости) для множества трехмерных участков, связанных с образцом. Двухмерные виды, взятые вдоль поперечных разрезов трехмерного графика электромагнитных характеристик, затем могут быть собраны и представлены, например, на устройстве отображения. Трехмерные виды графика электромагнитных характеристик также могут быть созданы, повернуты и представлены, например, на устройстве отображения.
Хотя объект настоящего изобретения был описан подробно в отношении его конкретных примерных вариантов осуществления, следует понимать, что специалисты в данной области техники, после осознания вышеизложенного, смогут легко выполнить изменения, вариации и эквиваленты этих вариантов осуществления. Соответственно, объем настоящего изобретения представлен скорее в качестве примера, а не ограничения, и объект изобретения не исключает включения таких модификаций, вариаций и/или дополнений к объекту настоящего изобретения, как будет понятно среднему специалисту в данной области техники.
Использование: для магнитоиндукционной томографии. Сущность изобретения заключается в том, что система для визуализации методом магнитоиндукционной томографии, содержит портативное устройство для магнитоиндукционной томографии, причем портативное устройство для магнитоиндукционной томографии содержит корпус и по меньшей мере один измерительный блок, причем каждый измерительный блок содержит одну катушку, причем портативное устройство для магнитоиндукционной томографии выполнено с возможностью получения результата измерения катушки, связанного с одной катушкой, когда одна катушка возбуждена РЧ-энергией и помещена рядом с образцом; систему определения положения, выполненную с возможностью определения положения портативного устройства для магнитоиндукционной томографии, связанного с каждым результатом измерения катушки, и систему создания графика, выполненную с возможностью создания графика электромагнитных характеристик по меньшей мере части образца по меньшей мере частично на основании результата измерения катушки, связанного с одной катушкой. Технический результат: обеспечение возможности точной визуализации методом магнитоиндукционной томографии. 2 н. и 15 з.п. ф-лы, 10 ил.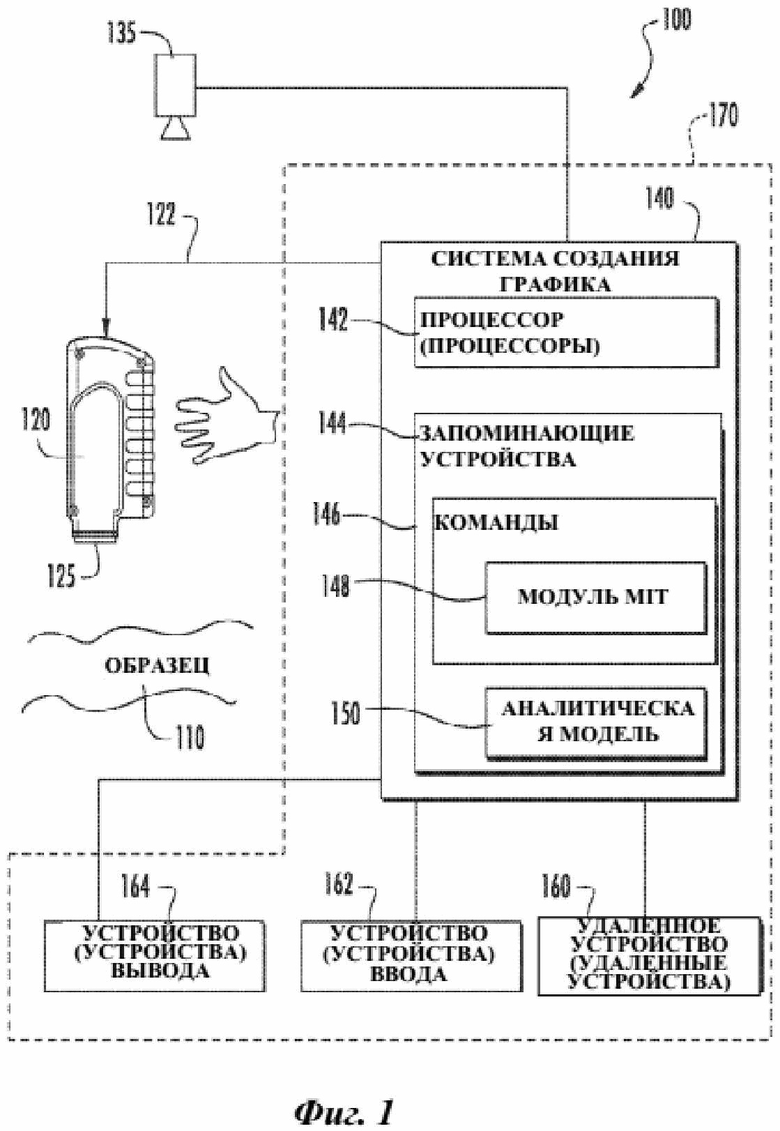
1. Система для визуализации методом магнитоиндукционной томографии, содержащая:
портативное устройство для магнитоиндукционной томографии, причем портативное устройство для магнитоиндукционной томографии содержит корпус и по меньшей мере один измерительный блок, причем каждый измерительный блок содержит одну катушку, причем портативное устройство для магнитоиндукционной томографии выполнено с возможностью получения результата измерения катушки, связанного с одной катушкой, когда одна катушка возбуждена РЧ-энергией и помещена рядом с образцом;
систему определения положения, выполненную с возможностью определения положения портативного устройства для магнитоиндукционной томографии, связанного с каждым результатом измерения катушки; и
систему создания графика, выполненную с возможностью создания графика электромагнитных характеристик по меньшей мере части образца по меньшей мере частично на основании результата измерения катушки, связанного с одной катушкой.
2. Система для визуализации методом магнитоиндукционной томографии по п. 1, отличающаяся тем, что корпус имеет форм-фактор, способствующий удержанию его рукой при получении результата измерения катушки.
3. Система для визуализации методом магнитоиндукционной томографии по п. 2, отличающаяся тем, что корпус имеет такой форм-фактор, что местоположение, в котором рука захватывает корпус при эксплуатации, отнесено на пороговое расстояние от одной катушки.
4. Система для визуализации методом магнитоиндукционной томографии по п. 3, отличающаяся тем, что пороговое расстояние находится в диапазоне от приблизительно 0,5 дюйма до приблизительно 4 дюймов.
5. Система для визуализации методом магнитоиндукционной томографии по п. 1, отличающаяся тем, что портативное устройство содержит один или несколько электрических компонентов или механических компонентов, расположенных в корпусе.
6. Система для визуализации методом магнитоиндукционной томографии по п. 5, отличающаяся тем, что один или несколько электрических компонентов или механических компонентов представляют собой одно или несколько из системы создания графика, источника РЧ-энергии, одного или нескольких процессоров, одного или нескольких запоминающих устройств, одного или нескольких устройств определения положения, одного или нескольких устройств связи или схемы измерения.
7. Система для визуализации методом магнитоиндукционной томографии по п. 5, отличающаяся тем, что один или несколько электрических компонентов или механических компонентов отнесены от одной катушки по меньшей мере одного измерительного блока на пороговое расстояние.
8. Система для визуализации методом магнитоиндукционной томографии по п. 7, отличающаяся тем, что пороговое расстояние находится в диапазоне от приблизительно 0,5 дюйма до приблизительно 4 дюймов.
9. Система для визуализации методом магнитоиндукционной томографии по п. 5, отличающаяся тем, что портативное устройство для магнитоиндукционной томографии дополнительно содержит экранирующий элемент, отделяющий одну катушку по меньшей мере одного измерительного блока от одного или нескольких электрических компонентов или механических компонентов.
10. Система для визуализации методом магнитоиндукционной томографии по п. 1, отличающаяся тем, что портативное устройство для магнитоиндукционной томографии поддерживает связь с системой создания графика по интерфейсу проводной или беспроводной связи.
11. Система для визуализации методом магнитоиндукционной томографии по п. 1, отличающаяся тем, что система определения положения содержит одну или несколько из электромагнитной системы определения положения, оптической системы обнаружения положения или акустической системы определения положения.
12. Система для визуализации методом магнитоиндукционной томографии по п. 1, отличающаяся тем, что система определения положения выполнена с возможностью определения положения и ориентации портативного устройства, связанных с каждым результатом измерения катушки.
13. Система для визуализации методом магнитоиндукционной томографии по п. 1, отличающаяся тем, что система определения положения содержит один или несколько датчиков движения или датчиков глубины на портативном устройстве для магнитоиндукционной томографии.
14. Портативное устройство для магнитоиндукционной томографии, содержащее:
корпус, имеющий форм-фактор, способствующий удержанию его рукой;
по меньшей мере один измерительный блок, причем каждый измерительный блок содержит одну катушку;
один или несколько электрических компонентов, отнесенных от по меньшей мере одного измерительного блока на достаточное расстояние для уменьшения электромагнитных помех между одним или несколькими электрическими компонентами и по меньшей мере одним измерительным блоком;
причем портативное устройство для магнитоиндукционной томографии выполнено с возможностью получения результата измерения катушки от измерительного блока, когда одна катушка возбуждена РЧ-энергией и размещена рядом с образцом.
15. Портативное устройство для магнитоиндукционной томографии по п. 14, отличающееся тем, что один или несколько электрических компонентов представляют собой одно или несколько из системы создания графика, источника РЧ-энергии, одного или нескольких процессоров, одного или нескольких запоминающих устройств, одного или нескольких устройств определения положения, одного или нескольких устройств связи или схемы измерения.
16. Портативное устройство для магнитоиндукционной томографии по п. 15, отличающееся тем, что один или несколько электрических компонентов отнесены от одной катушки по меньшей мере одного измерительного блока на пороговое расстояние.
17. Портативное устройство для магнитоиндукционной томографии по п. 15, отличающееся тем, что портативное устройство для магнитоиндукционной томографии дополнительно содержит экранирующий элемент, отделяющий одну катушку по меньшей мере одного измерительного блока от одного или нескольких электрических компонентов.
| US 2003184297 A1, 02.10.2003 | |||
| US 2008258717 A1, 23.10.2008 | |||
| US 2010182005 A1, 22.07.2010 | |||
| US 2012019238 A1, 26.01.2012 | |||
| СПОСОБ И УСТРОЙСТВО МОНИТОРИНГА ДЛЯ ВЫПОЛНЕНИЯ РЧ БЕЗОПАСНОГО МИТ СКАНИРОВАНИЯ | 2009 |
|
RU2508046C2 |

