Изобретение относится к инструменту для балансировки модуля газотурбинного двигателя.
В частности, изобретение относится к инструменту для балансировки модуля газотурбинного двигателя, имеющего большую массу или большой размер, на горизонтальном балансировочном станке типа станков, используемых в области производства авиационных силовых установок с целью балансировки роторов авиационных газотурбинных двигателей.
УРОВЕНЬ ТЕХНИКИ
Как известно, газотурбинный двигатель содержит один или несколько роторов, которые установлены с возможностью вращения в статоре.
Современный газотурбинный двигатель выполнен в соответствии с модульной концепцией и содержит по меньшей мере один ротор, который образован множеством элементов, изготовленных раздельно и соединенных между собой механически. Точно так же, статор такого газотурбинного двигателя состоит из множества соединенных между собой картеров статора.
Таким образом, газотурбинный двигатель представляет собой соединение модулей, по меньшей мере некоторые из которых содержат по меньшей мере один картер и соответствующий ротор, который в основном содержит вал ротора с продольной осью А и по меньшей мере одну лопаточную ступень, которая связана с частью продольного конца упомянутого вала ротора и которая окружена упомянутым картером статора.
Обычно балансировку ротора производят отдельно от статора. Такая конфигурация известна, например, из документов Heinz Bloch et al ʺMachinery Component and repairʺ, chapter 6, и US-3.146.623-А, в которых описана балансировка открытых роторов.
Согласно другой известной конфигурации, балансировку производят на роторе, установленном в статоре. Узел ротора и статора или модуль собирают непосредственно в балансировочном станке, то есть составные элементы упомянутого модуля газотурбинного двигателя устанавливают и закрепляют непосредственно в балансировочном станке без какого-либо промежуточного соединения. Такая балансировка описана в документе US-4.586.225-А.
Так, картер статора крепят непосредственно на станине балансировочного станка, а соответствующий ротор устанавливают непосредственно в опорных подшипниках балансировочного станка.
Эта конфигурация в целом является удовлетворительной для модулей небольшого или среднего размера, но она не приспособлена для модулей большого размера и большой массы, поскольку их габарит и вес затрудняют манипулирование упомянутым модулем в упомянутом балансировочном станке.
Кроме того, увеличение массы модуля, соединенного с инструментом, вынуждает проверять, чтобы собственные моды узла находились вне области использования балансировочного станка.
Кроме того, большеразмерный модуль газотурбинного двигателя трудно перемещать вручную для установки в балансировочном станке без риска повреждения.
Функциональные зазоры между лопаточной ступенью и картером статора являются по существу одинаковыми как для модуля газотурбинного двигателя среднего размера, так и для большеразмерного модуля.
Таким образом, понятно, что манипулирование модулем большого размера может привести к ненадлежащему перемещению ротора относительно картера и, следовательно, к нежелательным контактам между лопатками лопаточной ступени и картером статора, в результате чего может произойти повреждение упомянутого картера статора и упомянутой лопаточной ступени.
Следовательно, необходимо предусмотреть инструмент, обеспечивающий поддержание модуля газотурбинного двигателя, его подъем, транспортировку и установку в балансировочном станке при помощи уменьшенного числа промежуточных приспособлений, обеспечивающих безопасную транспортировку упомянутого модуля, его установку и крепление в балансировочном станке без риска повреждения.
Кроме того, балансировка модуля газотурбинного двигателя, поддерживаемого непосредственно балансировочным станком, предполагает осуществление некоторого числа регулировок во время установки каждого модуля, что значительно увеличивает общее время операции балансировки. Следовательно, существует потребность в инструменте, позволяющем более рационально осуществлять операции балансировки.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Изобретение призвано удовлетворить эту потребность и предложить инструмент для балансировки вышеупомянутого модуля газотурбинного двигателя, отличающийся тем, что упомянутый инструмент содержит по меньшей мере:
- одну балансировочную раму, содержащую опорные подшипники, выполненные с возможностью установки в них и направления вала и лопаточной ступени ротора, при этом положение по меньшей мере одного из упомянутых опорных подшипников можно регулировать относительно упомянутой рамы,
- первые и вторые средства, выполненные с возможностью крепления на упомянутом картере статора,
- третьи и четвертые средства, предусмотренные на упомянутой раме для крепления соответственно упомянутых первых и вторых средств на упомянутой раме, при этом положение по меньшей мере одного из упомянутых третьих и четвертых средств можно регулировать относительно упомянутой рамы,
- пятые средства транспортировки рамы,
- шестые опорные средства рамы, предусмотренные на упомянутой раме и выполненные с возможностью взаимодействовать как с балансировочным станком, так и с пятыми средствами транспортировки рамы с целью поддержания упомянутой рамы в упомянутых пятых средствах транспортировки и в упомянутом балансировочном станке.
Согласно другим отличительным признакам изобретения:
- инструмент содержит седьмые съемные средства блокировки ротора относительно картера статора, предназначенные для стопорения ротора относительно картера статора во время его транспортировки к балансировочному станку,
- упомянутые первые средства содержат кольцевую плиту, которая выполнена с возможностью крепления на первом конце картера статора, которая предназначена для взаимодействия с третьими средствами рамы и внутренний периферический край которой содержит седьмые съемные средства блокировки ротора,
- упомянутые вторые средства содержат венец, который выполнен с возможностью крепления на противоположном втором конце картера статора, предназначен для взаимодействия с третьими средствами рамы и содержит средство регулировки вертикального и поперечного положения картера статора,
- на своем первом конце вблизи картера статора балансировочная рама содержит первый направляющий опорный подшипник со смещенной опорой, который содержит трубчатый элемент, первый конец которого, предназначенный для захождения в картер статора, содержит по меньшей мере один опорный подшипник, в котором установлен с возможностью вращения опорный вал, заходящий в лопаточную ступень, и противоположный второй конец которого, который должен выступать из картера статора, содержит по меньшей мере одну периферическую опорную поверхность, которую закрепляют на первом кронштейне, неподвижно соединенном с рамой,
- на своем втором конце балансировочная рама содержит второй направляющий опорный роликовый подшипник, который содержит площадку с двумя роликами, по которым должен катиться вал, при этом упомянутая площадка установлена на втором кронштейне, неподвижно соединенном с рамой, и положение упомянутой площадки можно регулировать поперечно и вертикально относительно упомянутого второго кронштейна, затем окончательно зафиксировать в положении, регулируемом при помощи штифтов, проходящих через площадку и упомянутый второй кронштейн, и заблокировать в упомянутом положении при помощи стяжных винтов, расположенных с зазором между площадкой и кронштейном.
- пятые средства транспортировки рамы содержат транспортировочную тележку, выполненную с возможностью установки на ней рамы,
- первый и второй кронштейны имеют полуцилиндрическое сечение, и тележка и балансировочный станок содержат полуцилиндрические приемные опорные поверхности, регулируемые поперечно и вертикально и взаимодополняющие упомянутые первый и второй кронштейны, которые образуют шестые опорные средства рамы, и средства закрепления упомянутых первого и второго кронштейнов в упомянутых приемных опорных поверхностях,
- инструмент содержит восьмые средства подъема модуля, содержащие стропы, предназначенные для взаимодействия с кольцевой плитой и с концевым кронштейном вала ротора и выполненные с возможностью обеспечения подъема модуля, и съемный промежуточный кронштейн, связывающий вал ротора с картером статора,
- инструмент содержит девятые средства подъема рамы, содержащие стропы, предназначенные для взаимодействия с кольцевой плитой и с вторым кронштейном и выполненные с возможностью обеспечения подъема рамы,
- рама имеет открытую форму в виде трапеции или в виде U и содержит по меньшей мере одну горизонтальную ветвь, выполненную с возможностью опираться на тележку, и две ветви, в частности, по меньшей мере одну вертикальную ветвь, на концах которой установлены опорные подшипники рамы.
Объектом изобретения является также способ регулировки перед балансировкой балансировочного станка, отличающийся тем, что его осуществляют при помощи калибровочного узла, содержащего:
- шаблон картера статора, состоящий из набора брусков массой, соответствующей массе статора модуля, и выполненный с возможностью опираться на раму по существу в точке приложения веса картера статора модуля, и
- сбалансированный шаблон ротора с моментом инерции и с дисбалансом, по существу соответствующими ротору предназначенного для балансировки модуля,
и тем, что содержит:
- первый этап статической регулировки балансировочного станка, в ходе которого регулируют полуцилиндрические опорные поверхности балансировочного станка таким образом, чтобы они были коаксиальными,
- второй этап, в ходе которого в раме устанавливают шаблон ротора и шаблон картера статора,
- третий этап, в ходе которого раму, оснащенную шаблоном ротора и шаблоном картера статора, перемещают на полуцилиндрические опорные поверхности балансировочного станка,
- четвертый этап динамической регулировки машины, в ходе которого подгоняют вертикальное положение роликов относительно площадки второго опорного подшипника таким образом, чтобы оси опорных подшипников располагались параллельно оси приводного вала балансировочного станка, затем в площадке и втором кронштейне сверлят отверстия и в полученные отверстия вставляют штифты, чтобы определить положение площадки, и, наконец, площадку стопорят относительно второго кронштейна.
Наконец, объектом изобретения является способ балансировки модуля газотурбинного двигателя, отличающийся тем, что содержит:
- первый этап подъема и установки модуля в раму, находящуюся в пятых средствах транспортировки описанного выше инструмента, при помощи восьмых средств подъема,
- второй этап транспортировки модуля, оснащенного рамой, к балансировочному станку при помощи пятых средств транспортировки,
- третий этап подъема и перемещения модуля, оснащенного рамой, в балансировочный станок при помощи девятых средств подъема, и
- четвертый этап балансировки модуля в балансировочном станке.
ОПИСАНИЕ ФИГУР
Изобретение и его другие задачи, детали, отличительные признаки и преимущества будут более очевидны из нижеследующего подробного пояснительного описания варианта выполнения изобретения, представленного в качестве иллюстративного и не ограничительного примера со ссылками на прилагаемые схематичные чертежи, на которых:
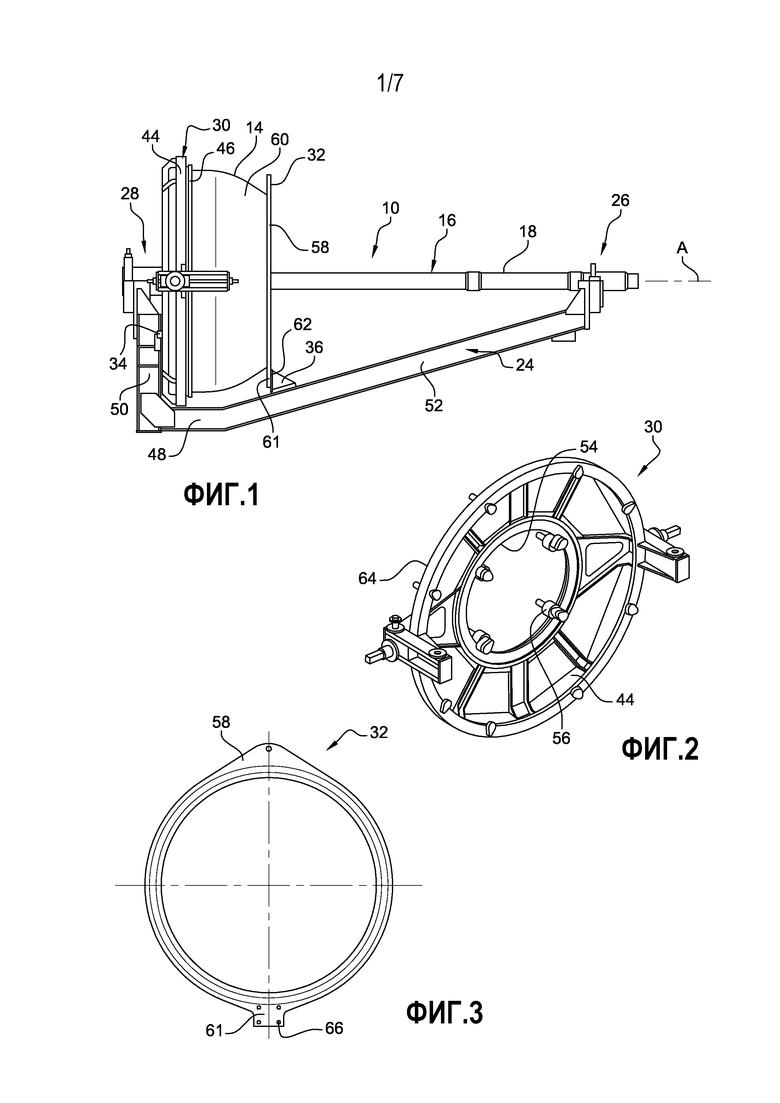
Фиг. 1 - вид сбоку модуля газотурбинного двигателя, установленного в балансировочной раме в соответствии с изобретением.
Фиг. 2 - вид в перспективе первых средств, выполненных с возможностью крепления на картере статора.
Фиг. 3 - вид в осевом разрезе вторых средств, выполненных с возможностью крепления на картере статора.
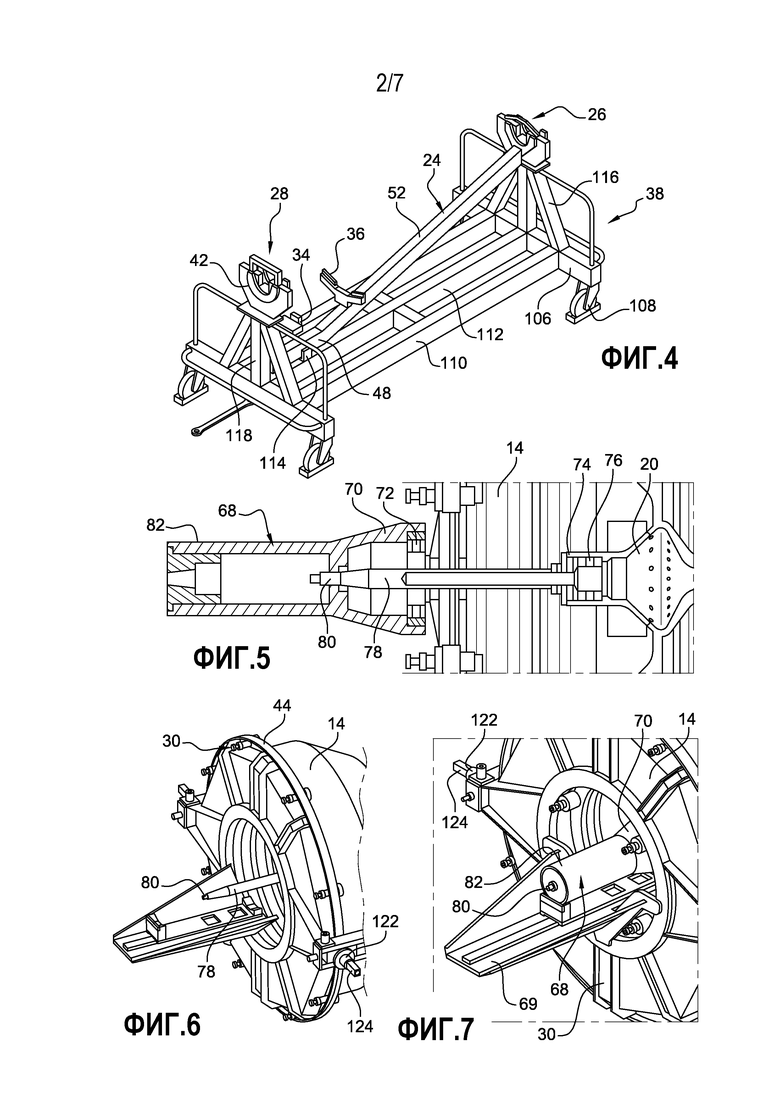
Фиг. 4 - вид в перспективе пятых средств транспортировки рамы с установленной в них рамой.
Фиг. 5 - вид в осевом разрезе первого смещенного опорного подшипника направления модуля газотурбинного двигателя.
Фиг. 6 и 7 - виды в перспективе, иллюстрирующие монтаж смещенного направляющего опорного подшипника в модуле газотурбинного двигателя.
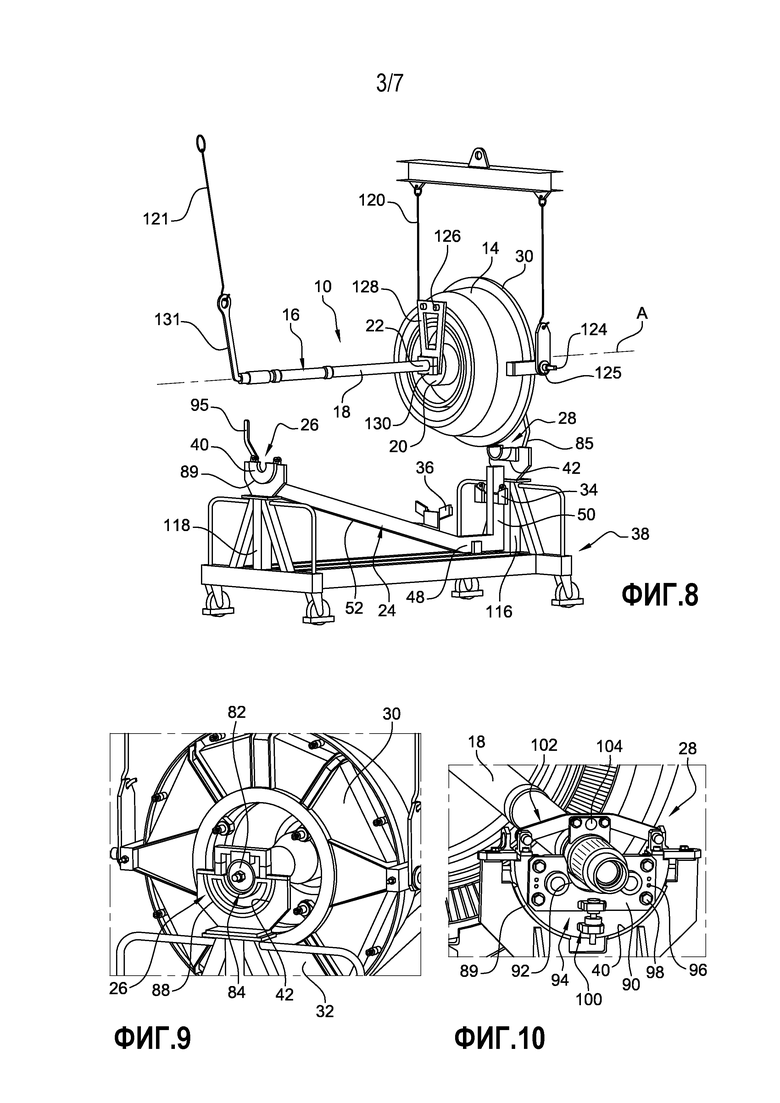
Фиг. 8 - вид в перспективе, иллюстрирующий первый этап подъема и установки на место в раме, находящейся в пятых средствах транспортировки, модуля газотурбинного двигателя при помощи восьмых средств подъема.
Фиг. 9 - детальный вид в перспективе, иллюстрирующий крепление первого смещенного направляющего опорного подшипника в раме.
Фиг. 10 - детальный вид в перспективе, иллюстрирующий введение вала ротора во второй кронштейн и установку второго кронштейна в приемную опорную поверхность пятых средств транспортировки.
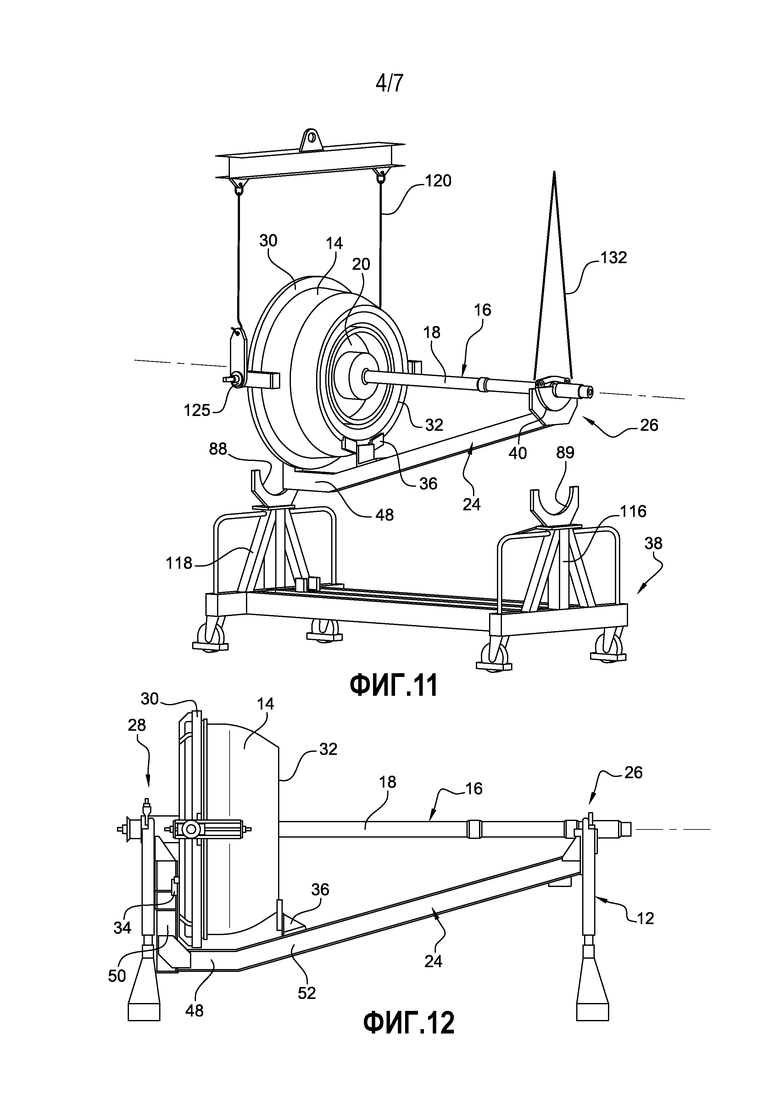
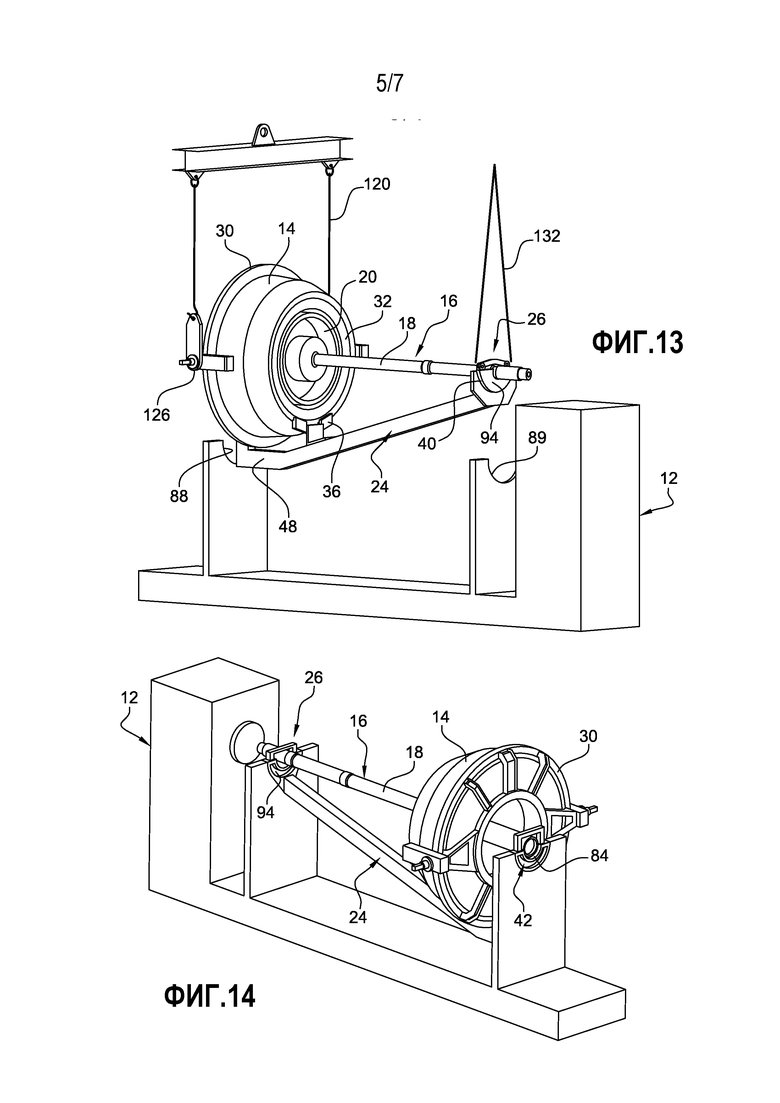
Фиг. 11 - вид в перспективе, иллюстрирующий третий этап подъема и перемещения модуля, оснащенного своей рамой, при помощи девятых средств подъема.
Фиг. 12 - вид сбоку модуля, оснащенного рамой, установленной в опорных поверхностях балансировочного станка.
Фиг. 13 - вид в перспективе модуля, оснащенного рамой, на подходе к балансировочному станку.
Фиг. 14 - вид в перспективе модуля, оснащенного рамой, установленного в балансировочном станке.
Фиг. 15 - общий вид в перспективе шаблона картера статора и шаблона ротора для калибровки инструмента в соответствии с изобретением.
Фиг. 16 - вид в перспективе шаблона картера статора и шаблона ротора, установленных в раме в соответствии с изобретением.
Фиг. 17 схематично иллюстрирует первый этап статической регулировки балансировочного станка в рамках заявленного способа регулировки перед балансировкой.
Фиг. 18 и 19 схематично иллюстрируют второй этап динамической регулировки в рамках заявленного способа регулировки перед балансировкой.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТА ВЫПОЛНЕНИЯ ИЗОБРЕТЕНИЯ
В нижеследующем описании идентичные детали или детали, имеющие аналогичные функции, имеют одинаковые цифровые обозначения.
На фиг. 1-14 представлен инструмент для балансировки модуля 10 газотурбинного двигателя в балансировочном станке 12.
Балансировочный станок 12 схематично показан, в частности, на фиг. 13 и 14.
Как известно, модуль 10 газотурбинного двигателя содержит по меньшей мере один картер 14 статора и ротор 16. Ротор 16 содержит вал 18 с продольной осью А и по меньшей мере одну лопаточную ступень 20, которая связана с частью продольного конца 22 упомянутого вала 18 ротора и окружена упомянутым картером 14 статора.
Эта конфигурация детально показана на фиг. 1 и 8.
Обычно такой модуль 10 устанавливают непосредственно в балансировочном станке 12, то есть вал 18 и лопаточную ступень 20 устанавливают с возможностью вращения непосредственно в балансировочном станке 12, и картер 14 статора крепят непосредственно на упомянутом балансировочном станке 12.
В целом, эта конфигурация является удовлетворительной в случае модулей 10 малого или среднего размера, но является исключительно неудобной в применении в случае модулей 10 большого размера или большой массы, поскольку затрудняет погрузочно-разгрузочные работы.
Изобретение позволяет устранить этот недостаток и предлагает инструмент, обеспечивающий легкую и воспроизводимую установку такого модуля 10 в балансировочном станке 12.
Для этого инструмент содержит по меньшей мере одну балансировочную раму 24, предназначенную для установки в ней модуля 10.
Балансировочная рама 24 содержит опорные подшипники 26 и 28, выполненные с возможностью захождения в них и направления соответственно вала 18 и лопаточной ступени 20 ротора 16.
Согласно изобретению, положение по меньшей мере одного из упомянутых опорных подшипников 26, 28 можно регулировать относительно рамы 24 для обеспечения подгонки ротора 10 относительно балансировочного станка 12, что будет описано ниже.
Кроме того, инструмент содержит первые и вторые средства 30, 32, выполненные с возможностью крепления на картере 14 статора.
Инструмент содержит также третьи и четвертые средства 34, 36, предусмотренные на раме 24 и предназначенные для обеспечения крепления первых средств 30 и вторых средств 32 на упомянутой раме 24.
Предпочтительно положение по меньшей мере одного из третьих и четвертых средств 34, 36 можно регулировать относительно упомянутой рамы 24.
Инструмент содержит также пятые средства 38 транспортировки рамы, предназначенные для доставки рамы к балансировочному станку 12.
Существенный отличительный признак изобретения состоит в том, что инструмент предпочтительно содержит шестые средства 40, 42, предусмотренные на раме 24 и выполненные с возможностью взаимодействия как с балансировочным станком 12, так и с пятыми средствами 38 транспортировки рамы 24, чтобы поддерживать упомянутую раму 24 в пятых средствах 38 транспортировки рамы 24 или в балансировочном станке 12 для облегчения перемещения рамы 24 от упомянутых пятых средств 38 транспортировки к упомянутому балансировочному станку 12.
Далее следует более подробное описание вышеупомянутых средств.
Согласно изобретению, первые средства 30 содержат, как показано на фиг. 2, кольцевую плиту 44, которая закреплена на первом конце 46 картера 14 статора, как показано на фиг. 1.
Кольцевая плита 44 предназначена для взаимодействия с третьими средствами 34 рамы. В предпочтительном варианте выполнения изобретения рама 24 имеет открытую форму в виде трапеции и содержит по меньшей мере одну горизонтальную ветвь 48, которая должна опираться на пятые средства 38 транспортировки, и содержит с двух сторон от этой ветви 48 две ветви, а именно вертикальную ветвь 50 и наклонную ветвь 52.
Понятно, что эта конфигурация не является ограничительной и что рама 24 может иметь другую открытую форму, например, открытую форму в виде U, точно так же содержащую горизонтальную ветвь 48 и две вертикальные ветви.
Вертикальная ветвь 50 содержит крепежную лапку 34, которая образует третьи средства рамы и на которой закреплена кольцевая плита 44, образующая первое средство, закрепленное на картере 14 статора.
Кроме того, кольцевая плита 44 позволяет не только поддерживать картер 14 статора, но также закрепить ротор 16 относительно картера 14 статора.
Для этого внутренний периферический край 54 кольцевой плиты содержит съемные средства блокировки ротора 16 относительно картера 14 статора, которые предназначены для стопорения ротора 16 относительно картера 14 статора во время его транспортировки к балансировочному станку 12.
Например, эти съемные седьмые средства блокировки содержат эксцентриковые гайки 56, которые расположены равномерно в угловом направлении вокруг внутреннего периферического края 54 кольцевой плиты 44, как показано на фиг. 2, и проходят радиально внутрь, входя в контакт с опорной поверхностью (не показана) лопаточной ступени 20 для стопорения упомянутой лопаточной ступени 20 внутри картера 14 статора и, следовательно, для стопорения во вращении ротора 16 относительно картера 14 статора.
Вторые средства 32, выполненные с возможностью крепления на картере 14 статора, содержат венец 58, который, как показано на фиг. 1, предназначен для крепления на картере 14 статора при помощи второго конца 60 картера 14 статора и для взаимодействия с четвертыми средствами 36, предусмотренными на раме 24.
В предпочтительном варианте выполнения изобретения четвертые средства 36 представляют собой лапку 36, которую закрепляют на наклонной ветви 52 рамы 24 и закрепляют на нижней части 60 венца 58, показанного на фиг. 3, чтобы этот венец 58 мог опираться на наклонную стойку 52 рамы.
Предпочтительно вторые средства 32 и четвертые средства 36 позволяют поддерживать вес картера 14 статора, который в их отсутствие располагался бы консольно, и удерживать его коаксиально с валом 18 ротора 16, чтобы избегать любого соприкосновения между упомянутым картером 14 статора и лопаточной ступенью 20.
Предпочтительно четвертые средства, образованные лапкой 36, можно регулировать относительно нижней части 60 венца 58, что позволяет регулировать упомянутый венец 58 в вертикальном направлении. Эта конфигурация позволяет регулировать коаксиальность картера 14 и ротора 16.
Эта конфигурация позволяет избегать консольного расположения картера 14 относительно вертикальной стойки 50 рамы 24 и смещения его веса относительно ротора 16.
Как известно, кольцевую плиту 44, как и венец 58, можно закрепить на картере 14 статора при помощи винтов и гаек. Например, на фиг. 2 показаны крепежные гайки 64, расположенные вокруг периферии кольцевой плиты 44.
Кроме того, лапка 36 крепления наклонной стойки 52 рамы 24 содержит отверстия, располагаемые напротив отверстий 66 нижней части венца 58. Эти отверстия предназначены для установки в них винтов 62 с зазором для обеспечения относительного перемещения венца 58 относительно лапки 36 и для его последующего стопорения. Таким образом, винты 62 образуют простое средство регулировки вертикального и поперечного положения картера 14 статора, что позволяет гарантировать коаксиальность упомянутого картера 14 статора с ротором 16.
Для обеспечения направления во вращении ротора 16 в раме 24 балансировочная рама 24 содержит на первом конце, расположенном вблизи картера 14 статора, то есть на конце вертикальной стойки 50, первый направляющий опорный подшипник 28 со смещенной опорой.
Направляющий опорный подшипник 28 со смещенной опорой, известный в технике под названием «вспомогательный опорный подшипник», в основном содержит, как показано на фиг. 5-7, трубчатый элемент 68, который имеет первый конец 70, предназначенный для введения, как показано на фиг. 7, в картер 14 статора. Этот конец 70 содержит по меньшей мере один опорный подшипник 72, в котором с возможностью вращения устанавливают лопаточная ступень 20.
В частности, лопаточная ступень 20 имеет концевую опорную поверхность 74, устанавливаемую с возможностью вращения внутри опорного подшипника 72 трубчатого элемента 70, а также через опорный подшипник 76, установленный вокруг опорного вала 78, который заходит внутрь картера 14 внутри лопаточной ступени 20 и конец 80 которого, выступающий из картера 14, заходит в трубчатый элемент 68. Этот монтаж обеспечивает направление во вращении лопаточной ступени 20 радиально между опорным валом 78 и трубчатым элементом 68.
Второй конец 82 трубчатого элемента 68 должен выступать за пределы картера 14 статора и содержит периферическую опорную поверхность, которую, как показано на фиг. 9, закрепляют на первом кронштейне 84, неподвижно соединенном с рамой 24. Периферическая опорная поверхность смещена в осевом направлении от опорного подшипника 76, поскольку опирается снаружи картера 14 статора.
Для монтажа смещенного направляющего опорного подшипника 28 сначала опорный вал 78 вводят в опорный подшипник 76 лопаточной ступени 20, как показано на фиг. 6, затем опорный вал вводят в трубчатый элемент 68, который перемещают скольжением в картере 14 статора при помощи направляющей рампы 69, как показано на фиг. 7.
После этого трубчатый элемент 68 можно закрепить на раме 24.
В частности, как показано на фиг. 9, первый кронштейн 84, неподвижно соединенный с рамой 24, в который заходит периферическая опорная поверхность 82 трубчатого элемента 68, имеет полуцилиндрическое сечение и имеет наружную периферию 42, которая образует шестые опорные средства рамы, выполненные с возможностью взаимодействия как с балансировочным станком 12, так и со средствами 38 транспортировки.
Для этого средства 38 транспортировки и балансировочный станок 12 содержат приемные опорные поверхности 88 для первого кронштейна 84, соответствующие по форме наружной периферии 42 кронштейна 84, как показано на фиг. 11 и 13.
Кроме того, средства 38 транспортировки и балансировочный станок 12 содержат средства 85 закрепления первого кронштейна 84, чтобы фиксировать его относительно средств 38 транспортировки или балансировочного станка 12. Например, как показано на фиг. 8, средство 85 закрепления средств 38 транспортировки содержит блокировочный рычаг, поворачивающийся в поперечном направлении.
Вместе с тем, понятно, что для применения этих средств закрепления можно использовать любое известное средство.
На втором конце балансировочной рамы 24, который соответствует концу ее наклонной ветви 52, балансировочная рама 24 содержит второй направляющий роликовый опорный подшипник 26, который содержит, как показано на фиг. 10, площадку 90 с двумя роликами 92, по которым должен катиться вал 18.
Площадку 90 устанавливают на втором кронштейне 94, неподвижно соединенном с рамой 24. Между площадкой 90 и вторым кронштейном 94 устанавливают с зазором стяжные винты 98, чтобы обеспечивать диапазон регулировки площадки 90 относительно второго кронштейна 94.
При незатянутых винтах 98 положение площадки 90 можно предварительно отрегулировать поперечно и вертикально относительно упомянутого второго кронштейна 94, затем окончательно зафиксировать в отрегулированном положении относительно второго кронштейна 94. После регулировки площадки 90 на втором кронштейне 94 в ней и одновременно во втором кронштейне 94 выполняют отверстия и блокируют ее в этом положении при помощи штифтов 96, которые устанавливают в отверстиях и которые проходят таким образом через площадку 90 и второй кронштейн 94. Затем площадку 90 стопорят в упомянутом положении при помощи стяжных винтов 98.
Таким образом, фиксируют положение оси вала 18 относительно второго кронштейна 94.
Предпочтительно между вторым кронштейном 94 и площадкой 90 можно расположить систему регулировки 100 при помощи ролика и червяка, чтобы вертикально регулировать положение площадки 90 относительно второго кронштейна 94.
Вал 18 можно удерживать в контакте с роликами 92 площадки 90 при помощи поперечного поводка 102, который закреплен своими противоположными концами на кронштейне 94 и который содержит центральный ролик, ось 104 которого показана на фиг. 10. Ролик катится по оси 18 и позволяет, таким образом, удерживать вал 8 в контакте с роликами 92.
Как будет показано ниже в настоящем описании, возможность вертикальной регулировки второго опорного подшипника 28 позволяет гарантировать параллельность оси А ротора 16 с осью В балансировочного станка и избегать дисбаланса лопаточной ступени 20 по причине ее наклона.
Так же, как и предыдущем случае, второй кронштейн 94 имеет полуцилиндрическое сечение и содержит цилиндрическую опорную поверхность 40, которая должна заходить в соответствующие полуцилиндрические приемные опорные поверхности 89 средств 38 транспортировки и балансировочного станка 12.
Как и в случае первого кронштейна 84, средства закрепления, такие как рычаг 95, показанный на фиг. 8, позволяют зафиксировать второй кронштейн в упомянутых приемных опорных поверхностях 89.
Как показано на фиг. 4, пятые средства 38 транспортировки рамы предпочтительно выполнены в виде транспортировочной тележки 38, выполненной с возможностью установки на ней рамы 24.
Эта тележка 38 в основном содержит две поперечные балки 106, которые оснащены на своих поперечных концах колесами 108 и между которыми находится конструкция 110, на которую может опираться горизонтальная ветвь 48 рамы 24.
Например, эта конструкция 110 содержит центральную балку 112, которая содержит две вертикальные лапки 114, предназначенные для блокировки горизонтальной ветви 48 рамы 24 в боковом направлении.
Тележка 38 содержит две вертикальные опоры 116, на концах которых выполнены полуцилиндрические приемные опорные поверхности 40, 42.
Для обеспечения установки модуля 16 в раме 24 инструмент содержит восьмые средства подъема модуля 16.
Эти средства содержат стропы 120, предназначенные для взаимодействия с кольцевой плитой 44.
Для этого кольцевая плита 44 содержит две диаметрально противоположные горизонтальные стойки 122, концы которых выполнены в виде цапф 124, которые могут заходить в кольца 125 находящиеся на концах стропов 120.
Дополнительно восьмые средства подъема модуля 10 содержат строп 121 и кронштейн 131, чтобы поддерживать конец вала 18 ротора 16.
Кроме того, как показано на фиг. 8, восьмые средства подъема содержат съемный промежуточный кронштейн 128, связывающий вал 18 ротора 16 с картером статора, при этом упомянутый съемный промежуточный кронштейн 128 содержит, например, пластину, которая закреплена своей верхней частью на картере 14 статора при помощи винтов 126 и под которой расположен зажим 130, охватывающий вал 18.
Как показано на фиг. 8, восьмые средства подъема позволяют поддерживать ротор 16 и картер 14 статора, чтобы установить их в раме 24. После крепления картера 14 статора на раме 24 кронштейн 128 можно снять.
Инструмент содержит также девятые средства подъема рамы 24, предназначенные для подъема рамы 24 после установки на ней ротора 16.
Как показано на фиг. 11, эти девятые средства подъема содержат стропы 120, кольца 125 которых предназначены для взаимодействия с диаметрально противоположными горизонтальными стойками 124 кронштейна, а также стропы 132, предназначенные для крепления на втором кронштейне 94 для обеспечения подъема рамы 24 за конец ее наклонной ветви 52.
Описанный инструмент в комплекте позволяет балансировать модуль 16 газотурбинного двигателя в соответствии с воспроизводимым способом многократно для последовательных роторов 16.
Предварительно в тележке 38 устанавливают раму 24, которая опирается на упомянутую тележку своей горизонтальной ветвью 48, своей вертикальной ветвью 50 и своей наклонной ветвью 52, которые опираются соответственно на полуцилиндрические опорные поверхности 88 и 89 опор 118 и 116 тележки 38.
Способ содержит первый этап подъема и установки на место модуля 10 в раме 24 при помощи восьмых средств подъема, как показано на фиг. 8. После установки ротор 16 закрепляют относительно рамы 44 картера 14 при помощи эксцентриковых гаек 56.
Затем в ходе второго этапа транспортировки модуля, оснащенного своей рамой 24, упомянутый модуль 10, оснащенный рамой 10, доставляют к балансировочному станку 12 при помощи тележки 38 таким образом, чтобы расположить тележку 38 в непосредственной близости от балансировочного станка 12.
Затем следует третий этап подъема и транспортировки модуля 10, оснащенного рамой 24, в балансировочный станок 12 при помощи описанных выше восьмых средств подъема.
В этом случае к балансировочному станку 12 перемещают комплекс, состоящий из модуля 10 и рамы 24.
Как и в предыдущем случае, рама опирается на полуцилиндрические опорные поверхности 88 и 89 балансировочного станка 12. После этого можно открепить ротор 16.
Наконец, способ содержит четвертый этап балансировки модуля 10 в балансировочном станке 12.
Следует отметить, что такой инструмент можно реализовать при условии, что ось А ротора 16 является, с одной стороны, коаксиальной с опорными подшипниками 26 и 28 рамы 24, и, с другой стороны, ось А ротора 16 расположена параллельно оси В балансировочного станка 12, в противном случае наклон модуля 10 приведет к появлению дисбаланса, который будет искажать показания балансировочного станка.
Следовательно, перед операциями балансировки необходимо отрегулировать раму 24 и балансировочный станок 12.
Действительно, поскольку рама 24 представляет собой открытую конструкцию, масса модуля 10 стремится открыть эту конструкцию и, в частности, отодвинуть друг от друга вертикальную ветвь 50 и наклонную ветвь 52, поэтому первоначальная коаксиальность опорных подшипников 26, 28 изменяется при установке модуля 10 в раме 24.
Чтобы устранить этот недостаток, изобретением предложен калибровочный узел 10', обеспечивающий регулировку инструмента.
Как показано на фиг. 15, этот калибровочный узел содержит шаблон 14' картера статора, который представляет собой набор брусков 134 массой, эквивалентной массе предназначенного для балансировки картера 14 статора, и который предназначен для размещения, как показано на фиг. 16, в точке приложения веса картера 14 статора реального модуля 10.
Кроме того, калибровочный узел содержит сбалансированный шаблон 16' ротора, показанный на фиг. 15 в положении хранения на опоре 136, предназначенной для его хранения, когда его не используют. Этот шаблон 16' ротора имеет момент инерции и дисбаланс, соответствующие ротору 16 предназначенного для балансировки модуля.
Калибровку рамы 24 осуществляют следующим образом.
Сначала осуществляют первый этап статической регулировки балансировочного станка, в ходе которого производят регулировку коаксиальности полуцилиндрических опорных поверхностей 88, 89 балансировочного станка таким образом, чтобы они были коаксиальными, как показано на фиг. 17. Так, оси А88 и А89 полуцилиндрических опорных поверхностей подгоняют таким образом, чтобы они образовали одну ось А.
Таким образом, на балансировочный станок можно установить первый и второй кронштейны 84, 94 рамы 24 в конфигурации коаксиальности, соответствующей реальной конфигурации балансируемого ротора 16.
Для проверки этой коаксиальности можно применять любое известное средство.
Затем, как показано на фиг. 16, в раме 24 устанавливают шаблон 14' картера статора и шаблон 16' ротора таким образом, чтобы раздвинуть ветвь 50 и ветвь 52 рамы, при этом рама находится в конфигурации нагрузки, соответствующей конфигурации балансировки.
После этого на третьем этапе раму 24, оснащенную шаблоном 16' ротора и шаблоном 14' картера статора, перемещают на полуцилиндрические опорные поверхности 88, 89 балансировочного станка 12.
Регулировка, произведенная в ходе первого этапа статической регулировки балансировочного станка, позволяет гарантировать, чтобы кронштейны 84, 94 рамы 24 располагались на полуцилиндрических опорных поверхностях балансировочного станка 12 по существу на одной линии.
После этого необходимо осуществить четвертый этап динамической регулировки на балансировочном станке, в ходе которого подгоняют вертикальное положение роликов 92 площадки 90, регулируя положение площадки 90 относительно второго кронштейна 94 таким образом, чтобы перейти от неконтролируемого положения наклона оси А шаблона 16' ротора, как показано на фиг.18, в котором ось А шаблона 16' ротора образует неопределенный угол с осью В балансировочного станка 12, в отрегулированное положение, в котором ось А шаблона 16' ротора расположена параллельно оси В балансировочного станка. Параллельность этих осей А, В позволяет избегать дисбаланса ротора 16, который отрицательно сказывался бы на измерении.
После этого следует сохранить эту регулировку, выполнив отверстия в площадке 90 и кронштейне 94 и вставив в них штифты 96, чтобы окончательно зафиксировать площадку 90 по отношению к второму кронштейну 94.
После этого можно снять с балансировочного станка 12 раму 24, отрегулированную в окончательном положении. Затем снимают с рамы 24 шаблон 16' ротора и шаблон 14' картера, при этом рама 24 готова принять реальный модуль 10, содержащий ротор 16 и картер 14 статора, для его балансировки.
Предпочтительно, поскольку рему 24 и балансировочный станок 12 регулируют раз и навсегда для всех роторов 16 одного типа, эта конфигурация обеспечивает значительный выигрыш во времени в случае балансировки партии идентичных роторов 16, так как регулировки обеспечивают воспроизводимость операции балансировки без промежуточной регулировки.


Изобретение относится к машиностроению, в частности к средствам балансировки роторных машин, а именно газотурбинного двигателя. Объектом изобретения является инструмент для балансировки модуля (10) газотурбинного двигателя в балансировочном станке, при этом модуль содержит по меньшей мере один картер (14) статора и ротор (16), содержащий вал (18) с продольной осью А и по меньшей мере одну лопаточную ступень (20), окруженную упомянутым картером (14) статора. При этом упомянутый инструмент содержит по меньшей мере одну балансировочную раму (14), содержащую опорные подшипники направления ротора (16), первые и вторые средства (30, 32), выполненные с возможностью крепления на упомянутом картере (14) статора, третьи и четвертые средства (34, 36), предусмотренные на упомянутой раме (24) для крепления упомянутых первых и вторых средств (30, 32) на упомянутой раме, пятые средства транспортировки рамы (24) и шестые опорные средства (84, 94) рамы, предусмотренные на упомянутой раме (24) и выполненные с возможностью взаимодействовать как с балансировочным станком, так и с пятыми средствами транспортировки рамы (24). Технический результат заключается в обеспечении возможности безопасной транспортировки упомянутого модуля, его установки и крепления в балансировочном станке без риска повреждения, сокращении затрат времени на операцию балансировки. 3 н. и 10 з.п. ф-лы, 19 ил.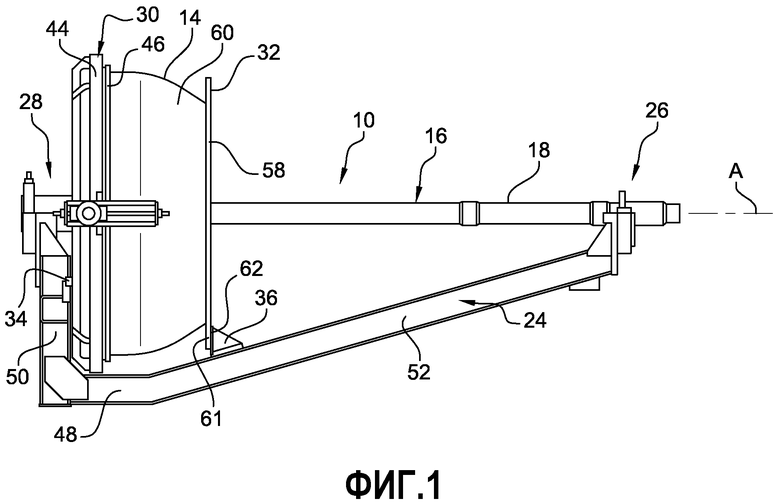
1. Инструмент для балансировки модуля (10) газотурбинного двигателя, при этом модуль содержит по меньшей мере один картер (14) статора и ротор (16), содержащий вал (18) с продольной осью А и по меньшей мере одну лопаточную ступень (20), которая связана с частью продольного конца (22) упомянутого вала (18) и охвачена упомянутым картером (14) статора, отличающийся тем, что упомянутый инструмент содержит по меньшей мере:
- одну балансировочную раму (14), содержащую опорные подшипники (26, 28), выполненные с возможностью установки в них и направления вала (18) и лопаточной ступени (20) ротора (16), при этом положение по меньшей мере одного из упомянутых опорных подшипников (28) можно регулировать относительно упомянутой рамы (24),
- первые и вторые средства (30, 32), выполненные с возможностью крепления на упомянутом картере (14) статора,
- третьи и четвертые средства (34, 36), предусмотренные на упомянутой раме (24) для крепления соответственно упомянутых первых и вторых средств (30, 32) на упомянутой раме, при этом положение по меньшей мере одного из упомянутых третьих и четвертых средств (34, 36) можно регулировать относительно упомянутой рамы,
- пятые средства (38) транспортировки рамы (24),
- шестые опорные средства (84, 94) рамы, предусмотренные на упомянутой раме (24) и выполненные с возможностью взаимодействовать как с балансировочным станком (12), так и с пятыми средствами (36) транспортировки рамы (24) с целью поддержания упомянутой рамы (24) в упомянутых пятых средствах (36) транспортировки и в упомянутом балансировочном станке (12).
2. Инструмент по предыдущему пункту, отличающийся тем, что содержит седьмые съемные средства (56) блокировки ротора (16) относительно картера (14) статора, предназначенные для стопорения ротора (16) относительно картера (14) статора во время его транспортировки к балансировочному станку (16).
3. Инструмент по предыдущему пункту, отличающийся тем, что упомянутые первые средства содержат кольцевую плиту (44), которая выполнена с возможностью крепления на первом конце (46) картера (14) статора, которая предназначена для взаимодействия с третьими средствами (34) рамы (24), и внутренний периферический край (54), которой содержит седьмые съемные средства (56) блокировки ротора (16).
4. Инструмент по предыдущему пункту, отличающийся тем, что упомянутые вторые средства (32) содержат венец (58), который выполнен с возможностью крепления на противоположном втором конце (60) картера (14) статора, предназначен для взаимодействия с третьими средствами (36) рамы (24) и содержит средство регулировки вертикального и поперечного положения картера (14) статора.
5. Инструмент по одному из пп.1-4, отличающийся тем, что на своем первом конце вблизи картера (14) статора балансировочная рама (24) содержит первый направляющий опорный подшипник (28) со смещенной опорой, который содержит трубчатый элемент (68), первый конец (70) которого, предназначенный для захождения в картер (14) статора, содержит по меньшей мере один опорный подшипник (72), в котором устанавливают с возможностью вращения опорный вал (78), заходящий в лопаточную ступень (20), и противоположный второй конец (82) которого, который должен выступать из картера (14) статора, содержит по меньшей мере одну периферическую опорную поверхность (42), которую закрепляют на первом кронштейне (84), неподвижно соединенном с рамой (24).
6. Инструмент по предыдущему пункту, отличающийся тем, что на своем втором конце балансировочная рама (24) содержит второй направляющий опорный роликовый подшипник (20), который содержит площадку (90) с двумя роликами (92), по которым должен катиться вал (18), при этом упомянутую площадку устанавливают на втором кронштейне (94), неподвижно соединенном с рамой (24), и положение упомянутой площадки (90) можно регулировать поперечно и вертикально относительно упомянутого второго кронштейна (94), затем окончательно зафиксировать в положении, регулируемом при помощи штифтов (96), проходящих через площадку (90) и упомянутый второй кронштейн (94), и заблокировать в упомянутом положении при помощи стяжных винтов (98), расположенных с зазором между площадкой (90) и кронштейном (94).
7. Инструмент по одному из пп.1-4, отличающийся тем, что пятые средства (38) транспортировки рамы (24) содержат транспортировочную тележку (38), выполненную с возможностью установки на ней рамы (24).
8. Инструмент по п.7, отличающийся тем, что первый и второй кронштейны (84, 94) имеют полуцилиндрическое сечение, и тем, что транспортировочная тележка (38) и балансировочный станок (12) содержат полуцилиндрические приемные опорные поверхности (88, 89), регулируемые поперечно и вертикально и взаимодополняющие упомянутые первый и второй кронштейны (84, 94), и средства закрепления упомянутых первого и второго кронштейнов (84, 94), которые образуют шестые опорные средства рамы, в упомянутых приемных опорных поверхностях (88, 89).
9. Инструмент по одному из пп.3, 4, 6, 8, отличающийся тем, что содержит восьмые средства подъема модуля, содержащие стропы (120, 121), предназначенные для взаимодействия с кольцевой плитой (44) и с концевым кронштейном (131) вала (18) ротора (16) и выполненные с возможностью обеспечения подъема модуля (10), и съемный промежуточный кронштейн (128), связывающий вал (18) ротора (16) с картером (14) статора.
10. Инструмент по п.3 или 6, отличающийся тем, что содержит девятые средства подъема рамы, содержащие стропы (120, 132), предназначенные для взаимодействия с кольцевой плитой (44) и со вторым кронштейном (94) и выполненные с возможностью обеспечения подъема рамы (24).
11. Инструмент по п.7, отличающийся тем, что рама (24) имеет открытую форму в виде трапеции или в виде U и содержит по меньшей мере одну горизонтальную ветвь (48), выполненную с возможностью опираться на тележку (38), и две ветви (50, 52), в частности по меньшей мере одну вертикальную ветвь (50), на концах которой установлены опорные подшипники (26, 28) рамы (24).
12. Способ регулировки перед балансировкой балансировочного станка (12) и инструмента по п.11, отличающийся тем, что его осуществляют при помощи калибровочного узла (10'), содержащего:
- шаблон (14') картера статора, состоящий из набора брусков (134) массой, соответствующей массе статора (14) модуля (10), и выполненный с возможностью опираться на раму (24), по существу, в точке приложения веса картера статора (14) модуля (10), и
- сбалансированный шаблон (16') ротора с моментом инерции и с дисбалансом, по существу, соответствующими ротору предназначенного для балансировки модуля (16),
и тем, что содержит:
- первый этап статической регулировки балансировочного станка (12), в ходе которого регулируют полуцилиндрические опорные поверхности (88, 89) балансировочного станка таким образом, чтобы они были коаксиальными,
- второй этап, в ходе которого в раме (24) устанавливают шаблон (16') ротора и шаблон (14') картера статора,
- третий этап, в ходе которого раму (24), оснащенную шаблоном (16') ротора и шаблоном (14') картера статора, перемещают на полуцилиндрические опорные поверхности балансировочного станка,
- четвертый этап динамической регулировки на балансировочном станке, в ходе которого подгоняют вертикальное положение роликов (92), регулируя площадку (90) относительно второго кронштейна (94) таким образом, чтобы оси А опорных подшипников располагались параллельно оси В приводного вала балансировочного станка (12), затем в площадке (90) и втором кронштейне (94) сверлят отверстия и в полученные отверстия вставляют штифты (96), чтобы определить положение площадки (90), и, наконец, площадку (90) стопорят относительно второго кронштейна (94).
13. Способ балансировки модуля (10) газотурбинного двигателя, отличающийся тем, что содержит:
- первый этап подъема и установки модуля (10) в раму (24), находящуюся в пятых средствах (38) транспортировки инструмента по пп.1-11, при помощи восьмых средств подъема,
- второй этап транспортировки модуля (38), оснащенного рамой (24), к балансировочному станку (12) при помощи пятых средств (35) транспортировки,
- третий этап подъема и перемещения модуля (10), оснащенного рамой (24), в балансировочный станок (12) при помощи девятых средств подъема, и
- четвертый этап балансировки модуля (10) в балансировочном станке (12).
| US 4586225 A, 06.05.1986 | |||
| Heinz Bloch et al | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| US 3146623 A, 01.09.1964 | |||
| US 4044442 A, 30.08.1977 | |||
| RU 2059214 C1, 27.04.1996. | |||

