Область техники
Настоящее изобретение относится в основном к способам и системам для регулирования работы топливных насосов.
Уровень техники/Краткое изложение
Системы двигателя автомобиля, например, создающие высокий крутящий момент, могут использовать прямой впрыск бензина ПВБ (GDI), чтобы увеличить выработку мощности и улучшить характеристики двигателя. Топливные инжекторы ПВБ в этих системах двигателя автомобиля потребляют топливо при более высоком давлении для осуществления прямого впрыска, чтобы создать более высокую степень распыления, обеспечивающую более эффективное сгорание. Например, система ПВБ может использовать насос низкого давления (также называемый «подкачивающий насос») с электрическим приводом, и насос высокого давления (также называемый «топливный насос прямого впрыска») с механическим приводом, подключенный соответственно последовательно между топливным баком и топливными инжекторами в топливном патрубке. Во многих вариантах использования ПВБ топливный подкачивающий насос первоначально перекачивает топливо из топливного бака в топливный патрубок, соединенный с подкачивающим насосом и топливным насосом прямого впрыска, причем топливный насос высокого давления или топливный насос прямого впрыска может использоваться для дополнительного увеличения давления топлива, подаваемого к топливным инжекторам.
В системе с одним подкачивающим насосом подкачивающий насос используется для перекачки топлива к инжекторам распределенного впрыска или к топливному насосу прямого впрыска. Подкачивающие насосы могут иметь большие динамические диапазоны, чтобы обеспечивать перекачку топлива с низкой скоростью нагнетания, например, при условиях холостого хода, или с высокой скоростью нагнетания, например, во время высокой нагрузки двигателя. Кроме того, эффективность перекачки подкачивающего насоса зависит от расхода в насосе, причем более низкие расходы топлива соответствуют более низким значениям эффективности перекачки. Часто двигатель работает при низких расходах топлива, и, таким образом, топливный насос большой мощности в это время может работать с низкой эффективностью перекачки, бесполезно тратя электроэнергию. В качестве альтернативы, если в системе подачи топлива в двигатель имеется топливный насос малой мощности вместо топливного насоса большой мощности, топливный насос малой мощности может оказаться неспособным подавать достаточное количество топлива во время высокой нагрузки двигателя, что приведет к выработке меньшего крутящего момента двигателя, по сравнению с требуемым крутящим моментом двигателя. Некоторые подходы, нацеленные на сокращение потерь при работе насоса и на увеличение подачи топлива, могут содержать использование двух топливных подкачивающих насосов.
Однако авторы настоящего изобретения обнаружили возможные проблемы в таких системах. Например, указанными двумя подкачивающими насосами невозможно управлять независимо, даже в том случае, если они оба могут работать большую часть времени эксплуатации автомобиля. Когда оба подкачивающих насоса используют с низкими расходами, может возникнуть дисбаланс между подкачивающими насосами, причем расход от одного насоса может значительно уменьшиться относительно другого насоса. Таким образом, в некоторых примерах, несмотря на то, что питание может поступать на оба насоса, только один из насосов может перекачивать топливо. В результате, может существовать бесполезная трата энергии и топлива для обеспечения питания насоса, который не перекачивает топливо или перекачивает топливо с низким расходом относительно другого насоса.
Например, вышеуказанные проблемы могут быть решены при помощи способа, содержащего регулирование работы первого подкачивающего насоса на основе разницы между требуемым давлением топливной рампы и измеренным давлением топливной рампы, и в качестве реакции на одно или более из следующего: нажатие педали акселератора, значение требуемого давления топливной рампы, превышающее пороговое значение давления и увеличение разности между требуемым давлением топливной рампы и измеренным давлением топливной рампы на величину, превышающую пороговое значение разности давлений, включение второго подкачивающего насоса. Таким образом, расход топлива можно уменьшить за счет включения только второго подкачивающего насоса, когда требуется дополнительное давление топлива, и когда требуется большой расход топлива через подкачивающие насосы.
В другом варианте реализации способ может содержать: генерацию команды для топливного насоса, на основе одного или более из следующего: требуемое давление топлива, разность между требуемым давлением топлива и измеренным давлением топлива и количество топлива для впрыска; определение первого рабочего цикла для первого подкачивающего насоса на основе команды для топливного насоса; определение второго рабочего цикла для второго подкачивающего насоса на основе команды для топливного насоса и регулирование работы первого и второго подкачивающих насосов на основе первого и второго рабочих циклов соответственно.
В другом варианте реализации топливная система может содержать: первый подкачивающий насос, второй подкачивающий насос, первый модуль подкачивающего насоса для регулирования первого рабочего цикла первого подкачивающего насоса, второй модуль подкачивающего насоса для регулирования второго рабочего цикла второго подкачивающего насоса и контроллер, имеющий электрическую связь с первым и вторым модулями насосов, причем контроллер может содержать машиночитаемые инструкции, хранимые в долговременной памяти для: генерации командного сигнала для подкачивающего насоса на основе разности между требуемым давлением топливной рампы и измеренным давлением топливной рампы и передачи командного сигнала для подкачивающего насоса к первому модулю подкачивающего насоса и ко второму модулю подкачивающего насоса. Таким образом, давление топливной рампы может в большей степени соответствовать требуемому давлению топливной рампы при раздельном управлении двумя подкачивающими насосами на основе общей входной команды от контроллера двигателя. Кроме того, технический эффект сокращения расхода топлива достигается за счет использования меньшего подкачивающего насоса, когда разность между требуемым давлением топливной рампы и измеренным давлением топливной рампы меньше порогового значения разности. Таким образом, использование и первого подкачивающего насоса, и второго подкачивающего насоса, только когда разность между требуемым давлением топливной рампы и измеренным давлением топливной рампы больше порогового значения разности, позволяет уменьшить потребление энергии и увеличить срок службы подкачивающего насоса. Кроме того, количество электропроводки и аппаратных средств обработки можно уменьшить при раздельном управлении двумя подкачивающими насосами, но с использованием одних и тех же входных команд от контроллера двигателя.
Следует подразумевать, что вышеприведенное краткое изложение дано для информирования в упрощенной форме о наборе решений, раскрытых далее в подробном описании. Краткое изложение не предназначено для идентификации главных или существенных отличительных признаков заявленного существа изобретения, объем которого определен единственным образом формулой изобретения, которая следует за подробным описанием. Кроме того, заявленное существо изобретения не ограничивается реализациями, которые устраняют какие-либо недостатки, отмеченные выше или в любой части этого раскрытия.
Краткое описание иллюстраций
На фиг. 1 показана схема примера системы двигателя, содержащей топливную систему в соответствии с вариантом реализации настоящего изобретения.
На фиг. 2 показан пример варианта реализации топливной системы, изображенной на фиг. 1, в том числе, два подкачивающих насоса в соответствии с вариантом реализации настоящего изобретения.
На фиг. 3 показана схема электрических соединений и компоненты управляющей системы для топливной системы, например, для топливной системы, изображенной на фиг. 1, в соответствии с вариантом реализации настоящего изобретения.
На фиг. 4 показана блок-схема алгоритма примера способа для регулирования работы топливной системы, содержащей два подкачивающих насоса, например, для топливной системы, изображенной на фиг. 1, в соответствии с вариантом реализации настоящего изобретения.
На фиг. 5 показаны графики, изображающие пример изменения напряжения команды для насоса и рабочий цикл для двух подкачивающих насосов топливной системы, например, топливной системы, изображенной на фиг. 1, в соответствии с вариантом реализации настоящего изобретения.
На фиг. 6 показан график, изображающий пример изменения работы подкачивающего насоса в результате изменения условий работы двигателя, в соответствии с вариантом реализации настоящего изобретения.
Подробное описание
Следующее раскрытие относится к системам и способам управления работой топливной системы в системе двигателя, например, в системе двигателя, показанной в качестве примера на фиг. 1. Топливная система может содержать два подкачивающих насоса, например, как в примере топливной системы, показанной на фиг. 2. Контроллер может управлять работой подкачивающих насосов посредством управляющих модулей насосов, как показано в примере управляющей системы топливного насоса на фиг. 3. В частности, контроллер может осуществлять управление с обратной связью указанными двумя подкачивающими насосами посредством соответствующих управляющих модулей насосов. Таким образом, контроллер может послать командные сигналы в управляющие модули для обеспечения работы подкачивающих насосов, а управляющие модули могут, в свою очередь, регулировать количество электроэнергии, подаваемой к соответствующим подкачивающим насосам, на основе командных сигналов, полученных от контроллера. В некоторых примерах, как раскрыто в примере управляющей программы на фиг. 4, этими двумя подкачивающими насосами могут управлять раздельно. В частности, контроллер может послать единственный командный сигнал в оба управляющих модуля, но эти два управляющих модуля могут интерпретировать командный сигнал по-разному. Также, при одинаковом сигнале на входе, могут отличаться выходные сигналы, генерируемые управляющими модулями в качестве реакции один и тот же входной сигнал. За счет раздельного управления двумя топливными насосами, имеющими разные размеры, при помощи единственного командного сигнала от контроллера, можно уменьшить стоимость и сложность топливной системы.
Первый топливный насос меньшего размера может работать непрерывно, с изменениями в зависимости от командного сигнала, а второй, более крупный, топливный насос может работать, когда требуемое количество топлива больше порогового значения, например, в соответствии с рабочим циклом насоса, показанным на фиг. 5. Требуемое давление топливной рампы можно поддерживать с большей точностью при независимом управлении двумя топливными насосами, имеющими разные размеры. Кроме того, можно уменьшить потребляемую мощность и, следовательно, расход топлива в топливной системе, если управлять двумя насосами раздельно. Пример команд и работы топливного насоса показан на фиг. 6. Таким образом, можно обеспечить эффективную перекачку топлива во всем динамическом диапазоне расходов топлива, чтобы подавать топливо с требуемым расходом.
Относительно терминологии, используемой во всем подробном описании, можно указать, что термины «насос высокого давления» и «топливный насос прямого впрыска» могут быть сокращены до терминов «насос ВД» (HP) (также используется обозначение НВД (НРР)) и «топливный насос ПВ» (DI) соответственно. Таким образом, термины НРР и «топливный насос ПВ» могут использоваться попеременно, в случае обозначения топливного насоса прямого впрыска высокого давления. Точно так же, насос низкого давления может упоминаться как подкачивающий насос. Кроме того, термин «насос низкого давления» может быть сокращен до терминов «насос НД» (LP) или ННД (LPP). «Система распределенного впрыска» может быть сокращена до СРВ (PFI), а термин «прямой впрыск» может быть сокращен до ПВ (DI). Кроме того, давление топливной рампы или давление топлива внутри топливной рампы (чаще всего, топливной рампы прямого впрыска), может быть обозначено как ДТР (FRP). «Топливная рампа прямого впрыска» может также упоминаться как «топливная рампа высокого давления», что можно сократить до термина «топливная рампа ВД» (HP). Кроме того, электромагнитный впускной запорный клапан для управления потоком топлива в насос ВД может упоминаться как «сливной клапан», «электромагнитный запорный клапан» ЭМЗК (SACV), «электронно управляемый электромагнитный впускной запорный клапан», а также «электронно управляемый клапан». Кроме того, когда включают электромагнитный впускной запорный клапан, насос НД упоминается как работающий в режиме переменного давления. Кроме того, электромагнитный запорный клапан может оставаться во включенном состоянии во время работы насоса ВД в режиме переменного давления. Если электромагнитный запорный клапан отключен, и насос ВД работает на основе механического регулирования давления без каких-либо команд, подаваемых на электронно управляемый сливной клапан, то насос ВД упоминается как работающий в механическом режиме или в режиме давления по умолчанию. Кроме того, электромагнитный запорный клапан может оставаться в отключенном состоянии во время работы насоса ВД в режиме давления по умолчанию.
На фиг. 1 показан пример камеры сгорания или цилиндра двигателя 10 внутреннего сгорания. Для управления двигателем 10 используется, по меньшей мере, частично, управляющая система, содержащая контроллер 12, и входной сигнал от водителя 130, поступающий через вводное устройство 132. В этом примере вводное устройство 132 содержит педаль акселератора и датчик 134 положения педали для генерации пропорционального сигнала положения педали ПП (РР). Цилиндр 14 (здесь также называемый камерой 14 сгорания) двигателя 10 может содержать стенки 136 камеры сгорания с расположенным в них поршнем 138. Поршень 138 может быть соединен с коленчатым валом 140 для преобразования возвратно-поступательного движения поршня во вращательное движение коленчатого вала. Коленчатый вал 140 может быть соединен, по меньшей мере, с одним ведущим колесом пассажирского автомобиля через систему трансмиссии (не показанную на схеме). Кроме того, мотор стартера (не показанный на схеме) может быть соединен с коленчатым валом 140 через маховик (не показанный на схеме), для обеспечения запуска двигателя 10.
Цилиндр 14 может получать всасываемый воздух через набор впускных воздушных патрубков 142, 144 и 146. Впускные воздушные патрубки 142, 144 и 146 могут быть связаны с другими цилиндрами двигателя 10, а не только с цилиндром 14. В некоторых примерах один или несколько впускных патрубков могут содержать устройство наддува, например, турбонагнетатель или механический нагнетатель. Например, на фиг. 1 показан двигатель 10, выполненный с турбонагнетателем, содержащим компрессор 174, установленный между впускными воздушными патрубками 142 и 144 и выпускной турбиной 176, установленной в выпускном патрубке 158. Компрессор 174 может, по меньшей мере, частично, приводиться в движение выпускной турбиной 176, при помощи вала 180, причем такое устройство наддува представляет собой турбонагнетатель. Однако в других примерах, где двигатель 10 снабжен механическим нагнетателем, выпускная турбина 176 может факультативно отсутствовать, а компрессор 174 может приводиться в движение механическим способом с приводом от мотора или двигателя автомобиля. Дроссель 162, содержащий дроссельную заслонку 164, может быть установлен во впускном патрубке двигателя для изменения расхода и/или давления всасываемого воздуха, подаваемого к цилиндрам двигателя. Например, дроссель 162 может быть установлен ниже по потоку относительно компрессора 174, как показано на фиг. 1, или, в качестве альтернативы, может быть установлен выше по потоку относительно компрессора 174.
Выпускной коллектор 148 может принимать отработавшие газы не только от цилиндра 14, но и от других цилиндров двигателя 10. Показано, что датчик 128 отработавших газов соединен с выпускным патрубком 158 выше по потоку относительно устройства 178 снижения токсичности отработавших газов. В качестве датчика 128 могут использовать различные подходящие для этой цели датчики, позволяющие определить воздушно-топливное отношение в отработавших газах, например, линейный датчик кислорода или универсальный (или широкодиапазонный) датчик кислорода в отработавших газах УДКОГ (UEGO), бистабильный датчик кислорода в отработавших газах или датчик кислорода в отработавших газах ДКОГ (EGO) (как показано на схеме), нагреваемый датчик кислорода в отработавших газах НДКОГ (HEGO), датчик NOx, НС или СО. Устройство 178 снижения токсичности отработавших газов может быть трехкомпонентным каталитическим нейтрализатором ТКН (TWC), уловителем NOx или каким-либо другим устройством снижения токсичности отработавших газов, а также комбинацией упомянутых устройств.
Каждый цилиндр двигателя 10 может содержать один или несколько впускных клапанов и один или несколько выпускных клапанов. Например, показано, что цилиндр 14 содержит, по меньшей мере, один впускной тарельчатый клапан 150 и, по меньшей мере, один выпускной тарельчатый клапан 156, расположенные в верхней части цилиндра 14. В некоторых примерах каждый цилиндр двигателя 10, в том числе, цилиндр 14, может содержать, по меньшей мере, два впускных тарельчатых клапана и, по меньшей мере, два выпускных тарельчатых клапана, расположенных в верхней части цилиндра.
Контроллер 12 может управлять впускным клапаном 150 при помощи привода 152. Подобным образом контроллер 12 может управлять выпускным клапаном 156 при помощи привода 154. При некоторых условиях контроллер 12 может изменять сигналы, подаваемые на приводы 152 и 154 для управления открытием и закрытием соответствующих впускных и выпускных клапанов. Положение впускного клапана 150 и выпускного клапана 156 можно определить посредством соответствующих датчиков положения клапанов (не показанных на схеме). Приводы клапанов могут быть выполнены в виде электропривода клапанов, кулачкового привода или их комбинации. Синхронизацией впускного клапана и выпускного клапана могут управлять одновременно или могут использовать какую-либо возможность изменения синхронизации впускного кулачка, изменения синхронизации выпускного кулачка, двойного независимого изменения фаз кулачкового распределения или фиксированную синхронизацию кулачка. Каждая система кулачкового привода может содержать один или несколько кулачков и может использовать одну или несколько систем переключения профиля кулачков ППК (CPS), изменения фаз кулачкового распределения ИФКР (VCT), изменения фаз газораспределения ИФГ (WT) и/или изменения высоты подъема клапанов ИВПК (VVL), с возможностью управления от контроллера 12, для изменения работы клапанов. Например, цилиндр 14 может в качестве альтернативы содержать впускной клапан, управляемый при помощи электропривода клапанов, и выпускной клапан, управляемый при помощи кулачкового привода, содержащего системы ППК и/или ИФКР. В других примерах впускными и выпускными клапанами могут управлять при помощи общего привода клапанов или системы приводов, а также с помощью привода или системы приводов для изменения фаз газораспределения.
Цилиндр 14 может иметь степень сжатия, представляющую собой отношение объемов камеры сгорания для положений поршня 138 в нижней мертвой точке и в верхней мертвой точке соответственно. Например, значение степени сжатия может находиться в диапазоне от 9:1 до 10:1. Однако в некоторых примерах, где используются другие виды топлива, степень сжатия могут увеличить. Это могут применять, например, при использовании топлива с более высоким октановым числом или топлива с более высокой удельной теплотой парообразования. Степень сжатия могут также увеличить при использовании прямого впрыска, вследствие ее влияния на детонацию в двигателе.
В некоторых примерах каждый цилиндр двигателя 10 может содержать свечу 192 зажигания для запуска процесса сгорания. Система 190 зажигания может обеспечить искру зажигания для камеры 14 сгорания при помощи свечи 192 зажигания при получении сигнала опережения зажигания O3 (SA) от контроллера 12, для выбранных режимов работы. Однако в некоторых вариантах реализации свеча 192 зажигания может отсутствовать, например, если двигатель 10 имеет возможность использовать процесс сгорания с самовоспламенением или воспламенением при помощи впрыска топлива, как может быть реализовано в некоторых дизельных двигателях.
В некоторых примерах каждый цилиндр двигателя 10 может быть выполнен с одним или несколькими топливными инжекторами для подачи топлива. В качестве не ограничивающего примера, показан цилиндр 14 с двумя топливными инжекторами 166 и 170. Топливные инжекторы 166 и 170 могут быть выполнены с возможностью подавать топливо, полученное из топливной системы 8. Как показано на фиг. 2, топливная система 8 может содержать один или несколько топливных баков, топливных насосов и топливных рамп. Показано, что топливный инжектор 166 соединен непосредственно с цилиндром 14 для обеспечения непосредственного впрыска топлива в цилиндр пропорционально ширине импульса сигнала впрыска ШИВ-1 (FPW-1), получаемого от контроллера 12 через электронный преобразователь 168. В этом случае топливный инжектор 166 обеспечивает процесс, известный как прямой впрыск (ПВ) топлива в цилиндр 14 для сгорания. Несмотря на то, что на фиг. 1 показан топливный инжектор 166, расположенный на боковой части цилиндра 14, его могут поместить над поршнем, например, рядом со свечой 192 зажигания. Такое положение может улучшить смешивание и сгорание при эксплуатации двигателя с топливом на спиртовой основе, из-за более низкой испаряемости некоторых видов топлива на спиртовой основе. В качестве альтернативы, топливный инжектор могут разместить над впускным клапаном или рядом с ним для улучшения смешивания. Топливо могут подавать к топливному инжектору 166 из топливного бака топливной системы 8 посредством топливного насоса высокого давления и топливной рампы. Кроме того, топливный бак может иметь измерительный преобразователь давления, подающий сигнал в контроллер 12.
Показано, что топливный инжектор 170 встроен во впускной патрубок 146, а не в цилиндр 14, что образует конфигурацию, известную как впрыск топлива во впускные каналы ВТВК (PFI), то есть, во впускной порт выше по потоку относительно цилиндра 14. Топливный инжектор 170 имеет возможность впрыскивать топливо, получаемое из топливной системы 8, пропорционально ширине импульса сигнала впрыска ШИВ-2 (FPW-2), получаемого от контроллера 12 через электронный преобразователь 171. Следует учитывать, что может использоваться один электронный преобразователь 168 или 171 для обеих систем впрыска топлива или может использоваться несколько электронных преобразователей, например, как изображено, электронный преобразователь 168 для топливного инжектора 166 и электронный преобразователь 171 для топливного инжектора 170.
В альтернативном примере каждый из топливных инжекторов 166 и 170 может быть выполнен как топливный инжектор прямого впрыска, для впрыскивания топлива непосредственно в цилиндр 14. В другом примере каждый из топливных инжекторов 166 и 170 может быть выполнен как топливный инжектор для впрыска топлива во впускные каналы, выше по потоку от впускного клапана 150. В других примерах цилиндр 14 может содержать только один топливный инжектор, выполненный с возможностью получать различные виды топлива из топливных систем в различных относительных количествах в виде топливной смеси, и указанный топливный инжектор может быть дополнительно выполнен с возможностью впрыскивать эту топливную смесь или непосредственно в цилиндр, работая как топливный инжектор прямого впрыска, или выше по потоку от впускных клапанов, работая как топливный инжектор впрыска во впускные каналы. Также следует отметить, что раскрытые здесь топливные системы не могут быть ограничены конкретными конфигурациями топливных инжекторов, раскрытыми здесь только в качестве примера.
Топливо может поступать в цилиндр из обоих инжекторов за время одного цикла цилиндра. Например, каждый инжектор может доставлять часть общего количества топлива для впрыска, для сжигания топлива в цилиндре 14. Кроме того, распределение и/или относительное количество топлива, подаваемого из каждого инжектора, могут изменять в зависимости от условий работы, например, нагрузки двигателя, детонации или температуры отработавших газов, например, как раскрыто здесь ниже. Топливо для впрыска во впускные каналы могут подавать во время события открытия впускного клапана, события закрытия впускного клапана (например, по существу перед тактом впуска), а также во время и открытия, и закрытия впускного клапана. Аналогичным образом, например, топливо для прямого впрыска могут подавать во время такта впуска, а также частично во время предыдущего такта выпуска, во время такта впуска и частично во время такта сжатия. Таким образом, даже для единственного события сгорания, впрыскиваемое топливо могут подавать в различные моменты времени, как во впускные каналы, так и посредством прямого впрыска. Кроме того, для единственного события сгорания, в течение цикла могут выполнить многократный впрыск подаваемого топлива. Многократный впрыск могут осуществить во время такта сжатия, такта впуска или любой соответствующей их комбинации.
Как было раскрыто выше, на фиг. 1 изображен только один цилиндр многоцилиндрового двигателя. Таким образом, каждый цилиндр может, аналогичным образом, содержать собственный набор впускных и выпускных клапанов, топливный инжектор (инжекторы), свечу зажигания (свечи зажигания) и т.д. Следует учитывать, что двигатель 10 может содержать любое подходящее количество цилиндров, например, 2, 3, 4, 5, 6, 8, 10, 12 или более цилиндров. Кроме того, каждый из указанных цилиндров может содержать некоторые или все компоненты, раскрытые и показанные на фиг. 1 в отношении цилиндра 14.
Топливные инжекторы 166 и 170 могут иметь различные характеристики, что может быть обусловлено различием размеров: например, один инжектор может иметь большее отверстие для впрыска, чем другой. Другие различия могут содержать, но без ограничения этим, различные углы распыления, различные рабочие температуры, различное нацеливание, различный выбор времени впрыска, различные характеристики распыления, различные местоположения и т.д. Кроме того, различные эффекты могут быть получены в результате изменения относительного распределения количества впрыскиваемого топлива между инжекторами 170 и 166.
Контроллер 12 показан на фиг. 1 как микрокомпьютер, содержащий микропроцессорное устройство 106, порты 108 ввода/вывода, электронный носитель данных для выполняемых программ и калибровочных значений, показанный в этом конкретном примере в виде микросхемы 110 постоянного запоминающего устройства, оперативное запоминающее устройство 112, энергонезависимое запоминающее устройство 114 и шину данных. Контроллер 12 может получать различные сигналы от датчиков, присоединенных к двигателю 10, и, кроме тех сигналов, которые были приведены выше, может получать данные измерения поступающего массового расхода воздуха МРВ (MAF) от датчика 122 массового расхода воздуха; температуры хладагента двигателя ТХД (ЕСТ) от датчика 116 температуры, присоединенного к охлаждающей рубашке 118; сигнал профиля зажигания СПЗ (PIP) от датчика 120 Холла (или другого типа), соединенного с коленчатым валом 140; положение дросселя ПД (TP) от датчика положения дросселя; сигнал абсолютного давления в коллекторе АДК (MAP) от датчика 124. Сигнал частоты вращения двигателя ЧВД (RPM) может быть сгенерирован контроллером 12 по сигналу СПЗ. Сигнал давления в коллекторе АДК от датчика давления в коллекторе могут использовать для определения разрежения или избыточного давления во впускном коллекторе.
На фиг. 2 показана схема примера топливной системы 8, изображенной на фиг. 1. Топливная система 8 может использоваться для подачи топлива из топливного бака 202 к топливным инжекторам 252 прямого впрыска и инжекторам 242 для впрыска во впускные каналы, в двигателе, таком как двигатель 10, показанный на фиг. 1. Топливной системой 8 может управлять контроллер, такой как контроллер 12, показанный на фиг. 1, чтобы выполнить все операции или их часть, как раскрыто ниже в отношении примера программы, изображенной на фиг. 4.
Топливная система 8 может подавать топливо из топливного бака 202 в двигатель, например, в двигатель 10, изображенный в качестве примера на фиг. 1. Например, топливо может содержать один или несколько углеводородных компонентов и может также содержать спиртовой компонент. В некоторых случаях этот спиртовой компонент может обеспечить подавление детонации в двигателе, при условии подачи в соответствующем количестве, и может содержать любой подходящий спирт, например, этанол, метанол и т.д. В качестве другого примера, спирт (например, метанол, этанол) может содержать добавленную воду. В качестве конкретного неограничивающего примера, топливо может содержать бензин и этанол, (например, иметь марку Е10 и/или Е85). Топливо могут подавать в топливный бак 202 через заправочный патрубок 204.
Первый топливный насос 208 низкого давления (здесь также называемый первым подкачивающим насосом 208) и второй топливный насос 218 низкого давления (здесь, также называемый вторым подкачивающим насосом 218) соединен с топливным баком 202, и может быть приведен в действие для подачи топлива в первую топливную рампу 240 и/или во вторую топливную рампу 250. В частности, насосы 208 и 218 могут использоваться для подачи топлива из топливного бака 202 в первую группу инжекторов 242 для впрыска во впускные каналы через первый топливный патрубок 230. Подкачивающие насосы 208 и 218 могут также упоминаться как ННД 208 и ННД 218 или насосы 208 и 218 НД (низкого давления). Например, ННД 208 и ННД 218 могут представлять собой топливные насосы низкого давления с электрическим приводом, расположенные, по меньшей мере, частично, внутри топливного бака 202. Топливо, выкачанное ННД 208 и ННД 218, могут подавать при низком давлении в первую топливную рампу 240, соединенную с одним или несколькими топливными инжекторами первой группы инжекторов 242 для впрыска во впускные каналы (здесь также называемые первой группой инжекторов). Первый запорный клапан 209 ННД может располагаться в выпускном отверстии ННД 208. Запорный клапан 209 ННД может направлять топливо, выходящее из ННД 208, к первому топливному патрубку 230 и второму топливному патрубку 290 и может препятствовать вытеканию топлива из первого и второго топливных патрубков 230 и 290 соответственно обратно к ННД 208. Точно так же второй запорный клапан 219 ННД может располагаться в выпускном отверстии ННД 218. Запорный клапан 219 ННД может направлять топливо, выходящее из ННД 218, к первому топливному патрубку 230 и второму топливному патрубку 290 и может препятствовать вытеканию топлива из первого и второго топливных патрубков 230 и 290 соответственно обратно к ННД 218.
Хотя показано, что первая топливная рампа 240 может распределять топливо по четырем топливным инжекторам первой группы инжекторов 242 для впрыска во впускные каналы, следует учитывать, что первая топливная рампа 240 может распределять топливо для любого подходящего количества топливных инжекторов. Например, первая топливная рампа 240 может распределять топливо для одного топливного инжектора первой группы инжекторов 242 для впрыска во впускные каналы для каждого цилиндра двигателя. Обратите внимание, что в других примерах первый топливный патрубок 230 может подавать топливо к топливным инжекторам первой группы инжекторов 242 для впрыска во впускные каналы через две или более топливные рампы. Например, в случае, когда цилиндры двигателя выполнены в V-образной конфигурации, могут использоваться две топливные рампы для распределения топлива из первого топливного патрубка к каждому топливному инжектору из первой группы инжекторов.
Топливный насос 228 прямого впрыска (или насос 228 ВД, или насос 228 высокого давления) расположен во втором топливном патрубке 232 и может получать топливо через ННД 208. Например, топливный насос 228 прямого впрыска может представлять собой насос объемного действия с механическим приводом. Топливный насос 228 прямого впрыска может быть соединен с группой топливных инжекторов 252 прямого впрыска через вторую топливную рампу 250. Вторая топливная рампа 250 может представлять собой топливную рампу высокого (или более высокого) давления. Кроме того, топливный насос 228 прямого впрыска может быть соединен по текучей среде с первым топливным патрубком 230 через второй топливный патрубок 290. Таким образом, топливо при более низком давлении, выкачанное ННД 208, может затем поступать в топливный насос 228 прямого впрыска, где давление топлива может быть повышено для обеспечения подачи топлива с более высоким давлением для прямого впрыска во вторую топливную рампу 250, соединенную с одним или несколькими топливными инжекторами 252 прямого впрыска (здесь также называемыми второй группой инжекторов). В некоторых примерах топливный фильтр (не показанный на схеме) может быть расположен выше по потоку от топливного насоса 228 прямого впрыска, для удаления из топлива твердых частиц.
Различные компоненты топливной системы 8 соединены с управляющей системой двигателя, например, с контроллером 12. Например, контроллер 12 может получить данные об условиях работы от различных датчиков, соединенных с топливной системой 8, в дополнение к датчикам, раскрытым ранее в отношении фиг. 1. Различные сигналы для контроллера могут содержать, например, данные о количестве топлива, находящегося в топливном баке 202, полученные от датчика 206 уровня топлива. Контроллер 12 может также получать данные о составе топлива от одного или нескольких датчиков состава топлива, в дополнение к данным или в качестве альтернативы данным о составе топлива, полученным от датчика отработавших газов (например, от датчика 128, показанного на фиг. 1). Например, данные о составе топлива, находящегося в топливном баке 202, могут быть предоставлены датчиком 210 состава топлива. Датчик 210 состава топлива может дополнительно содержать датчик температуры топлива. Дополнительно или в качестве альтернативы, один или несколько датчиков состава топлива могут быть размещены в любом подходящем месте в топливных патрубках между топливным баком и двумя группами топливных инжекторов.
Топливная система 8 может дополнительно содержать один или несколько датчиков давления для измерения давления топлива в различных точках топливной системы 8. Например, первый датчик 238 давления может быть соединен с первой топливной рампой 240, а второй датчик давления 248 может быть соединен со второй топливной рампой 250. Датчик давления 238 может использоваться для определения давления в топливной линии второго топливного патрубка 290 и/или первой топливной рампы 240. Таким образом, в некоторых примерах, давление, измеренное первым датчиком давления 238, может соответствовать давлению, создаваемому насосом низкого давления 208. Второй датчик давления 248 может быть размещен ниже по потоку от топливного насоса 228 ПВ во второй топливной рампе 250 и может использоваться для измерения давления топливной рампы ДТР (FRP) во второй топливной рампе 250. Данные измерения давления в различных местах топливной системы 8 могут быть переданы контроллеру 12.
ННД 208 и ННД 218 могут использовать для подачи топлива к первой топливной рампе 240 во время впрыскивания топлива во впускные каналы и/или к топливному насосу 228 ПВ во время прямого впрыска топлива. И во время впрыска топлива во впускные каналы, и во время прямого впрыска топлива контроллер 12 может управлять ННД 208 и ННД 218, чтобы обеспечивать подачу топлива к первой топливной рампе 240 и/или топливному насосу 228 ПВ, на основе давления топливной рампы и в первой топливной рампе 240, и во второй топливной рампе 250.
Контроллер 12 может управлять ННД 208 по существу непрерывно во время работы двигателя, чтобы поддерживать давление топлива в топливных рампах 240 и 250 и в топливных патрубках 290 и 230 выше давления паров топлива. Однако в других примерах ННД 208 могут периодически выключать, например, когда измеренное давление топливной рампы больше, чем требуемое давление и/или давление топливной рампы больше, чем давление паров топлива. Кроме того, контроллер 12 может не управлять ННД 218 непрерывно. Например, ННД 218 могут включить, когда требуемое давление топливной рампы превышает пороговое значения давления и/или когда разность между требуемым давлением топливной рампы и измеренным давлением топливной рампы, по данным от одного или нескольких датчиков давления 238 и 248, больше порогового значения разности. В других примерах ННД 218 могут включить, только когда требуемый расход топлива для топливной рампы 240 и/или топливной рампы 250 больше порогового значения расхода. Требуемый расход топлива может представлять собой расход, достаточный для поддержания требуемого давления топливной рампы и/или количества впрыскиваемого топлива. Таким образом, ННД 218 могут включить, только когда ННД 208 не обеспечивает достаточное давление топлива, и требуется дополнительное давление топлива, чтобы обеспечить требуемое давление топливной рампы. В частности, подаваемую к ННД 208 мощность могут регулировать, чтобы обеспечить требуемое давление топливной рампы. Когда к ННД 208 подают максимальную мощность, и требуемое давление топливной рампы не обеспечено, и/или когда требуемый расход топлива для топливной рампы не обеспечен, могут включить ННД 218 для обеспечения дополнительного давления топлива, чтобы давление топливной рампы соответствовало требуемому давлению. Например, когда расход в системе впрыска топлива больше порогового значения расхода, работа ННД 208 может быть недостаточной, чтобы подавать необходимое количество топлива к топливной рампе 240 и/или к топливной рампе 250, с расходом топлива во время впрыска через инжекторы 242 и/или 252. Таким образом, ННД 218 могут включить, когда одно или несколько значений требуемого количества топлива для впрыска превышает пороговое значение количества, требуемый расход топлива к топливной рампе 240 и/или к топливной рампе 250 превышает пороговое значение расхода, требуемое давление топлива превышает пороговое значение давления и т.д. Требуемое количество топлива для впрыска могут определить на основе требования водителя по крутящему моменту, где требование могут определить на основе положения вводного устройства 132, впускного массового расхода воздуха, требуемого воздушно-топливного отношения, положения впускного дросселя 162 и т.д. Таким образом, требуемое количество топлива для впрыска может представлять собой количество топлива, достаточное, чтобы обеспечить требуемое воздушно-топливное отношение и обеспечить требуемый водителем крутящий момент.
ННД 208 и/или ННД 218 могут представлять собой турбинные насосы, приводимые в действие соответствующими моторами с изменяемой частотой вращения. В некоторых примерах ННД 208 может представлять собой насос меньшего размера, чем ННД 218. Таким образом, ННД 208 может быть упомянут здесь как меньший первый ННД 208, а ННД 218 может быть упомянут здесь как больший второй ННД 218. Таким образом, размер крыльчатки ННД 218 может быть больше, чем размер крыльчатки ННД 208 и/или мотор ННД 218 может быть более мощным, чем мотор ННД 208. Таким образом, максимальная электрическая мощность (например, максимальное напряжение и/или максимальный ток), которую могут подавать на ННД 218, может быть больше, чем электрическая мощность, которую могут подавать на ННД 208. Таким образом, ННД 218 может обеспечивать при перекачке более высокий объемный расход топлива, чем ННД 208, когда насосы 208 и 218 используют при их соответствующих максимальных напряжениях. Иными словами, максимальный расход топлива через ННД 218 может быть больше, чем максимальный расход топлива через ННД 208.
Контроллер 12 может иметь связь с электронными модулями насосов ЭМН (РЕМ) для каждого из насосов 208 и 218. На основе сигналов, полученных от контроллера 12, ЭМН могут регулировать количество электроэнергии, подаваемой на электромоторы насосов 208 и 218. Таким образом, каждый из насосов 208 и 218 может содержать электромотор, соединенный с насосом для обеспечения возможности включения насосов 208 и 218. Контроллер 12 может посылать команды в соответствующие ЭМН для подачи требуемого количества электроэнергии на ННД 208 и ННД 218. В этом раскрытии командный сигнал, посланный из контроллера 12 к ЭМН, может упоминаться как «команда БУТ». Команду БУТ могут сформировать на основе одного или более из следующего: требуемое давление топливной рампы, разность между требуемым давлением топливной рампы и измеренным давлением топливной рампы (при управлении с обратной связью) и количество топлива для впрыска (при управлении с упреждением). Таким образом, команду БУТ могут увеличить при более значительной разности между требуемым давлением топливной рампы и измеренным давлением топливной рампы, когда измеренное давление топливной рампы меньше требуемого давления топливной рампы, при увеличении требуемого давления топливной рампы и при увеличении количества топлива для впрыска. Количество электроэнергии, подаваемой на ННД 208 и/или ННД 218, может увеличиться при увеличении команды БУТ. Таким образом, на основе командного сигнала БУТ, полученного от контроллера 12, электронные модули насосов могут регулировать количество электроэнергии, подаваемой на соответствующие электромоторы насосов 208 и 218.
В частности, модули ЭМН могут управлять ННД 208 и/или ННД 218 в импульсном режиме и/или в непрерывном режиме. В импульсном режиме насосы ННД 208 и ННД 218 могут периодически приводить в действие таким образом, чтобы ННД 208 и ННД 218 совершали колебания между состояниями «включен» и «выключен». Таким образом, ННД 208 и ННД 218 могут раскручивать в течение первого промежутка времени, например, любого промежутка времени в диапазоне между 0,2 и 0,5 секунды, а затем могут выключить их на второй промежуток времени, прежде чем включить снова. В некоторых примерах второй промежуток времени может быть больше первого промежутка времени, поэтому в таком импульсном режиме работы насосы ННД 208 и/или ННД 218 могут работать меньшее количество времени по сравнению со временем бездействия. В то время, когда ННД 208 и/или ННД 218 выключены, давление могут поддерживать в аккумуляторе давления, который может быть неотъемлемой частью конструкции топливной системы.
В другом примере при работе в импульсном режиме ННД 208 и/или ННД 218 могут включить (то есть, перевести в состояние «включен»), но могут оставить при нулевом напряжении. При таком режиме для ННД 208 можно гарантировать более низкое потребление энергии в ННД 208 и/или ННД 218, обеспечивая при этом более короткое время реакции при приведении в действие ННД 208 и/или ННД 218. Когда требуется работа насоса низкого давления, напряжение, подаваемое на ННД 208 и/или ННД 218, могут увеличить от нулевого напряжения, чтобы активировать работу НДД. Таким образом, ННД 208 и/или ННД 218 могут работать в импульсном режиме от нулевого напряжения до напряжения, отличного от нуля. Например, ННД 208 может работать в импульсном режиме от нулевого напряжения до полного напряжения. В другом примере ННД 208 и/или ННД 218 могут работать в импульсном режиме для коротких интервалов, например, 50-250 миллисекунд при напряжении, отличном от нуля. Требуемое напряжение могут выбрать на основе продолжительности коротких интервалов времени. Например, ННД 208 и/или ННД 218 могут работать в импульсном режиме при 8 В, когда короткий интервал имеет величину от 0 до 50 миллисекунд. В качестве альтернативы, если продолжительность короткого интервала составляет от 50 до 100 миллисекунд, то ННД 208 и/или ННД 218 могут работать в импульсном режиме при 10 В. В другом примере ННД 208 и/или ННД 218 могут работать в импульсном режиме при 12 В, когда интервал находится в диапазоне между 100 и 250 миллисекундами.
В непрерывном режиме напряжение могут подавать в рабочем цикле на электромоторы насосов ННД 208 и/или ННД 218. Рабочий цикл может представлять собой часть одного цикла сигнала, когда сигнал подают при более высоком напряжении. Таким образом, рабочий цикл может изменяться от 0 до 100%, где относительное количество времени существования сигнала рабочего цикла, при более высоком напряжении, может увеличиваться пропорционально от 0 до 100%. Частота сигнала может определяться количеством циклов за единицу времени. Этот рабочий цикл, обеспеченный для электромоторов насосов, может, в некоторых примерах, иметь частоту 10 кГц. Однако в другом примере частота рабочего цикла может быть больше или меньше 10 кГц. В других примерах частоту рабочего цикла могут изменять.
В некоторых примерах ННД 208 и/или ННД 218 могут работать в рабочем цикле 100%, то есть, сигнал напряжения обеспечивают для ННД непрерывно при более высоком напряжении. В другом примере ННД 208 и/или ННД 218 могут работать в рабочем цикле 0%, где ННД 208 и/или ННД 218 могут перевести в состояние «выключен» или для них могут непрерывно обеспечивать более низкое напряжение (например, уровень земли) в сигнале рабочего цикла. Количество электроэнергии, подаваемой на ННД 208 и ННД 218, могут увеличивать для увеличения соответствующих рабочих циклов. Таким образом, посредством изменения рабочего цикла могут регулировать подачу электроэнергии к ННД 208 и ННД 218.
ННД 208 и ННД 218, а также топливный насос 228 ПВ могут использовать для поддержания требуемого давления топливной рампы во второй топливной рампе 250. Датчик 236 давления, присоединенный ко второй топливной рампе 250, может обеспечивать оценку давления топлива, существующего в группе инжекторов 252 прямого впрыска. Затем, на основе разности между оцененным давлением топливной рампы и требуемым давлением топливной рампы, могут регулировать производительность каждого насоса. Например, если топливный насос 228 ПВ работает в режиме переменного давления, контроллер 12 может регулировать работу клапана управления потоком (например, электромагнитным запорным клапаном) топливного насоса 228 ПВ, чтобы изменить эффективный объем насоса (например, рабочий цикл насоса) для каждого такта насоса. Кроме того, ННД 208 могут, в основном, активировать посредством нулевого напряжения, и указанный насос может работать в импульсном режиме при напряжении, отличном от нуля, только, когда обнаруживают пары топлива во впускном отверстии топливного насоса 228 ПВ.
В другом примере ННД 208 и/или ННД 218 могут работать в импульсном режиме, чтобы поддерживать давление топливной рампы (ДТР) во второй топливной рампе 250, когда топливный насос 228 ПВ работает в режиме давления по умолчанию. Здесь, ННД 208 и/или ННД 218 могут работать в импульсном режиме при полном напряжении, когда одно или несколько показаний давления, определенных датчиком 236 давления во время рабочего хода топливного насоса 228 ПВ, ниже, чем пороговое давление. Кроме того, могут использовать несколько показаний давления, полученных только во время рабочих ходов в топливном насосе 228 ПВ. Также, например, могут определить среднее значение нескольких показаний, и если среднее значение ниже порогового давления, то ННД 208 и/или ННД 218 могут работать в импульсном режиме с напряжением, отличным от нуля.
Контроллер 12 может также управлять работой каждого из топливных насосов ННД 208 и ННД 218 и топливного насоса 228 ПВ, чтобы регулировать количество, давление, расход и т.д. топлива, подаваемого в двигатель. Например, контроллер 12 может изменять уставку давления, величину рабочего хода насоса, команду рабочего цикла насоса и/или расход топлива для топливных насосов, чтобы подавать топливо в различные места топливной системы. Например, рабочий цикл топливного насоса ПВ может относиться к частичному количеству от полного объема топливного насоса ПВ, которое следует перекачать. Таким образом, рабочий цикл 10% для топливного насоса ПВ может представлять собой включение электромагнитного запорного клапана таким образом, чтобы можно было перекачать 10% объема топливного насоса ПВ. Электронный преобразователь (не показанный на схеме), электрически соединенный с контроллером 12, могут использовать для подачи требуемого управляющего сигнала на ННД 208 и/или ННД 218, для регулирования производительности (например, частоты вращения, выходного давления) ННД 208 и/или ННД 218. Количество топлива, подаваемого в группу инжекторов прямого впрыска через топливный насос 228 ПВ, могут регулировать посредством регулирования и координирования производительности ННД 208 и/или ННД 218 и топливного насоса 228 ПВ. Например, контроллер 12 может управлять ННД 208 и/или ННД 218 с использованием схемы управления с обратной связью, с измерением выходного давления насоса низкого давления во втором топливном патрубке 290 (например, с использованием датчика давления 234) и управлением производительностью ННД 208 и/или ННД 218 в соответствии с достижением требуемого выходного давления (например, величины уставки) насоса низкого давления.
На фиг. 3 показана схема 300 примера топливной управляющей системы 350 для управления двумя подкачивающими насосами, которые могут входить в состав топливной системы, например, топливной системы 8, раскрытой выше с использованием фиг. 1. В частности, схема 200 иллюстрирует примеры компонентов топливной управляющей системы 350 и электрические соединения между компонентами топливной управляющей системы 350. Таким образом, схема 200 показывает, как компоненты топливной управляющей системы 350 могут быть электрически соединены друг с другом, и как эти компоненты могут обмениваться электрическими сигналами друг с другом.
Топливная управляющая система 350 может содержать первый подкачивающий насос 366 и второй подкачивающий насос 368, которыми может управлять контроллер 360. Контроллер 360 может представлять собой блок управления трансмиссией БУТ (РСМ). Контроллер 360 может быть таким же устройством, как и контроллер 12, раскрытый выше с использованием фиг. 1, или близким по типу контроллером. В некоторых примерах контроллер 360 может представлять собой контроллер 12. Однако в других примерах контроллер 360 может представлять собой отдельный контроллер, не являющийся контроллером трансмиссии, и может представлять собой специальный контроллер для топливной системы. Первый подкачивающий насос 366 может быть таким же или подобным подкачивающему насосу 208 и/или второй подкачивающий насос 368 может быть таким же или подобным подкачивающему насосу 218, как раскрыто выше на фиг. 1. В некоторых примерах первый подкачивающий насос 366 может представлять собой подкачивающий насос 208 и/или подкачивающий насос 368 может представлять собой подкачивающий насос 218.
Также, подкачивающий насос 366 может иметь меньший размер, чем подкачивающий насос 368. В одном варианте реализации подкачивающий насос 366 могут использовать непрерывно, в то время как подкачивающий насос 368 могут использовать периодически, как раскрыто более подробно ниже для примера способа, показанного на фиг. 4. Топливная управляющая система 350 может дополнительно содержать первый электронный модуль 362 топливного насоса и второй электронный модуль 364 топливного насоса. Первый электронный модуль 362 топливного насоса может быть указан здесь как первый электронный модуль насоса ЭМН 362, а второй электронный модуль топливного насоса может быть указан здесь как второй ЭМН 364. Электронные модули насосов ЭМН 362 и ЭМН 364 могут получать команды от контроллера 360 для регулирования количества электроэнергии (например, напряжения и/или тока), подаваемой к подкачивающим насосам 366 и 368. В частности, модуль 362 может регулировать количество электроэнергии, подаваемой к первому подкачивающему насосу 366, а модуль 364 может регулировать количество электроэнергии, подаваемой ко второму подкачивающему насосу 368. Таким образом, на основе электрических сигналов, полученных от контроллера 360, модули 362 и 364 могут регулировать напряжение и/или ток, подаваемые на подкачивающие насосы 366 и 368 соответственно. В частности, модули 362 и 364 могут регулировать количество электроэнергии, подаваемой к соответствующим электромоторам подкачивающих насосов 366 и 368. Таким образом, модуль 362 может регулировать количество электроэнергии, подаваемой к первому электромотору 372 первого подкачивающего насоса 366, а модуль 364 может регулировать количество электроэнергии, подаваемой ко второму электромотору 374 второго подкачивающего насоса 368.
Контроллер 360 может содержать программное обеспечение (например, машиночитаемые инструкции, хранимые в долговременной памяти) для определения требуемого давления топлива на основе условий работы двигателя, оцененных посредством различных датчиков, как раскрыто выше с использованием фиг. 1. Например, контроллер 360 может определить требуемое давление топлива, на основе одного или более из следующего: требуемый водителем крутящий момент, оцененный на основе положения педали акселератора (например, вводного устройства 132, показанного выше на фиг. 1), массовый расход воздуха, нагрузка двигателя, дополнительные нагрузки и т.д. Контроллер 360 может использовать режим управления с обратной связью для подкачивающих насосов 366 и 368, чтобы обеспечить требуемое давление топлива в одной или нескольких топливных рампах (например, в топливных рампах 240 и 250, раскрытых выше на фиг. 2). Таким образом, контроллер 360 может послать сигналы в модуль 362 и/или в модуль 364, чтобы регулировать количество электроэнергии, подаваемой к подкачивающим насосам 366 и 368, на основе разности между требуемым давлением топлива и измеренным давлением топлива. Измеренное давление топливной рампы могут оценить на основе показаний одного или нескольких датчиков давления топливной рампы (например, датчиков давления 238 и 248 топливной рампы, раскрытых выше на фиг. 2). Таким образом, количество электроэнергии, подаваемой к электромоторам 372 и 374 подкачивающих насосов 366 и/или 368 соответственно, могут регулировать для обеспечения более точного соответствия измеренного давления топливной рампы и требуемого давления топливной рампы. Также, количество электроэнергии, подаваемой к подкачивающим насосам 366 и/или 368, могут увеличить для увеличения разности между измеренным давлением топливной рампы и требуемым давлением топливной рампы, когда измеренное давление топливной рампы меньше требуемого давления топливной рампы. Кроме того, количество электроэнергии, подаваемое к подкачивающим насосам 366 и/или 368, могут регулировать на основе количества топлива для впрыска. Таким образом, когда количество топлива для впрыска увеличивается, количество электроэнергии, подаваемой к подкачивающим насосам 366 и/или 368, могут увеличить, чтобы продолжить подачу топлива в топливную рампу, поскольку топливо выходит из топливной рампы во время впрыска топлива. В частности, требуемый расход топлива могут определить на основе количества топлива для впрыска. Требуемый расход топлива может представлять собой расход топлива из подкачивающего насоса 366 и/или подкачивающего насоса 368, достаточный для поддержания давления топлива в топливной рампе с учетом количества топлива, выходящего из топливной рампы через топливные инжекторы.
В частности, контроллер 360 может генерировать и посылать сигнал 365 команды топливного насоса КТН (FPC) через единственный выходной контакт к электронным модулям 362 и 364 топливных насосов. Как раскрыто выше, сигнал 365 КТН могут сгенерировать на основе одного или более из следующего: требуемое давление топлива, разность между требуемым давлением топлива и измеренным давлением топлива, требуемый водителем крутящий момент, который могут оценить на основе положения педали акселератора (например, вводного устройства 132, показанного выше на фиг. 1) и требуемый расход топлива, который могут определить на основе количества топлива для впрыска. Таким образом, в некоторых примерах электронные модули 362 и 364 могут получить тот же самый или похожий сигнал от контроллера 360. Сигнал 365 КТН, посланный из контроллера 360 к электронным модулям 362 и 364, могут закодировать посредством рабочего цикла и/или частоты. В некоторых примерах рабочий цикл сигнала 365 КТН может иметь частоту приблизительно 250 Гц. Однако в других примерах частота сигнала 365 КТН может быть меньше или больше, чем 250 Гц. Например, сигнал 365 КТН может представлять собой напряжение рабочего цикла РЦ (DC), формирующее команду между 0 В (или низким напряжением включения насоса), то есть, команду 0%, и напряжением верхнего предела, то есть, команду 100%. В другом примере КТН может представлять собой серию импульсов напряжения, которые могут интерпретироваться как команда задания величины процента в диапазоне между 0% и 100%. Посланное требование может быть закодировано в рабочем цикле или посредством ширины импульса сигнала 365, где рабочий цикл может быть независим от ошибки таймера в устройстве отправки (например, в контроллере 360).
Таким образом, сигнал 365 КТН (например, напряжение и/или рабочий цикл сигнала, посланного в электронные модули 362 и 364), могут регулировать, чтобы обеспечить более точное соответствие измеренного давления топливной рампы и требуемого давления топливной рампы. Также, сигнал 365 КТН (например, напряжение и/или рабочий цикл сигнала, посланного в электронные модули 362 и 364), могут увеличить для увеличения разности между измеренным давлением топливной рампы и требуемым давлением топливной рампы, когда измеренное давление топливной рампы меньше требуемого давления топливной рампы. Кроме того рабочий цикл сигнала 365 КТН могут увеличить для увеличения требуемого давления топливной рампы, увеличения требуемого расхода топлива, увеличения требуемого водителем крутящего момента и увеличения количества топлива для впрыска.
Поскольку тот же самый командный сигнал могут использовать для подачи на вход обоих модулей 362 и 364, может использоваться только один выходной контакт на контроллере или БУТ 360 для управления подкачивающими насосами 366 и 368. Точно так же, сигнал 365 КТН могут послать к модулям 362 и 364 через единственный провод. Однако нужно учитывать, что в других примерах сигнал 365 КТН могут послать к модулям 362 и 364 независимо, и модули 362 и 364 могут быть соединены различными проводами с контроллером 360 для подачи сигнала 365 КТН. Кроме того, в некоторых примерах контроллер 360 может генерировать различные сигналы КТН для модулей 362 и 364. Таким образом, контроллер 360 может генерировать первый сигнал КТН для модуля 362 и второй, отличающийся, сигнал КТН для модуля 364.
На основе сигнала 365 КТН, полученного от контроллера 360, электронные модули насосов (ЭМН) 362 и 364 могут регулировать количество электроэнергии, подаваемой на электромоторы 372 и 374 насосов 366 и 368 соответственно. Таким образом, ЭМН 362 и 364 могут регулировать количество электроэнергии (например, ток и/или напряжение), подаваемое на электромоторы 372 и 374 насосов 366 и 368 соответственно. Первый ЭМН 362 может содержать машиночитаемые инструкции, хранимые в долговременной памяти для расшифровки сигнала 365 КТН, полученного от контроллера 360 и определения количества электроэнергии, необходимого для подачи на электромотор 372 насоса 366 на основе сигнала 365 КТН. Кроме того, второй ЭМН 364 может содержать машиночитаемые инструкции, хранимые в долговременной памяти для расшифровки сигнала 365 КТН, полученного от контроллера 360 и определения количества электроэнергии, необходимого для подачи на электромотор 374 насоса 368 на основе сигнала 365 КТН. В частности, первый ЭМН 362 может содержать первую таблицу преобразования, связывающую сигнал КТН с рабочим циклом, необходимым для подачи на электромотор 372. Примеры таблиц преобразования, которые могут быть сохранены в памяти ЭМН 362, показаны ниже на фиг. 5 в графиках 500 и 550. ЭМН 364 может содержать вторую таблицу преобразования, отличающуюся от первой таблицы преобразования первого ЭМН 362 и связывающую сигнал КТН с рабочим циклом, необходимым для подачи на электромотор 374. Примеры таблиц преобразования, которые могут быть сохранены в памяти ЭМН 364, показаны ниже на фиг. 5 в графиках 525 и 575. Таким образом, ЭМН 362 и 364 могут содержать различные машиночитаемые инструкции, хранимые в долговременной памяти для интерпретации сигнала 365 КТН различным образом. В результате, ЭМН 362 может подавать напряжение рабочего цикла на электромотор 372, отличающееся от того, которое ЭМН 364 может подавать на электромотор 374 на основе того же самого командного сигнала КТН, полученного от контроллера 360.
В некоторых примерах ЭМН 362 и 364 могут регулировать величину или интенсивность напряжения и/или тока, подаваемого к насосам 366 и 368 соответственно. В частности, на основе сигнала 365 КТН, модуль 362 может подавать электроэнергию в первом рабочем цикле 367 к электромотору 372 подкачивающего насоса 366, а модуль 364 может подавать электроэнергию во втором рабочем цикле 369 к электромотору 374 подкачивающего насоса 368. Рабочие циклы 367 и 369, переданные от модулей 362 и 364, могут представлять собой различные напряжения и/или токи. Однако в других примерах, рабочие циклы 367 и 369 могут представлять собой приблизительно те же самые напряжения и/или токи. Следует учитывать, что в некоторых примерах насосы 366 и 368 не могут работать в импульсном режиме, и что электроэнергию могут подавать непрерывно, где напряжение могут регулировать на основе командного сигнала, полученного от контроллера 360.
В импульсном режиме рабочий цикл могут регулировать в диапазоне между 0% и 100%, или между 0 и 1. При работе в импульсном режиме электроэнергия (например, напряжение) может представлять собой импульс «выключен» (например, нулевое напряжение) или импульс «включен» (например, напряжение отличное от нуля). Рабочий цикл может представлять собой пропорцию времени, в течение которого подают импульс «включен» и напряжение, отличное от нуля. Также, насос 366 и/или насос 368 могут перевести в состояние «выключен», когда их соответствующие рабочие циклы равны 0.
Например, при работе в импульсном режиме импульс напряжения «включен» могут регулировать для обеспечения более точного соответствия расхода топлива при заданном требуемом расходе. Таким образом, могут регулировать амплитуду импульсов напряжения. Например, когда уровни топлива в топливном баке (например, в топливном баке 202, раскрытом выше на фиг. 2) уменьшаются ниже порогового значения уровня, насосом 366 и/или насосом 368 могут управлять при более низком напряжении, чтобы уменьшить вероятность перегорания подкачивающего насоса.
В некоторых примерах первый топливный подкачивающий насос 366 может работать в непрерывном режиме, а второй топливный подкачивающий насос 368 может работать в импульсном режиме. Однако в других примерах второй топливный подкачивающий насос 368 может работать в непрерывном режиме, а первый топливный подкачивающий насос 366 может работать в импульсном режиме. В дополнительных примерах и топливный насос 366, и топливный насос 368 могут работать в непрерывном режиме. В некоторых примерах и топливный насос 366, и топливный насос 368 могут работать в импульсном режиме.
Кроме того, второй топливный подкачивающий насос 368 могут включить, когда сигнал 365 КТН превышает пороговое напряжение и/или рабочий цикл, и могут включить, когда сигнал 365 КТН уменьшается ниже порогового напряжения и/или рабочего цикла. Например, второй топливный подкачивающий насос 368 могут включить в качестве реакции на одно или более из следующего: нажатие водителем педали акселератора, требуемое давление топлива, превышающее пороговое значение давления, увеличение разности между требуемым давлением топлива и измеренным давлением топлива на величину, превышающую пороговое значение разности давлений, требуемый расход топлива, превышающий пороговое значение расхода и т.д. Электронные модули 362 и 364 насосов могут определить рабочий цикл для обоих электромоторов 372 и 374 при помощи таблицы преобразования для рабочего цикла, например, при помощи диаграммы рабочего цикла, показанной на фиг. 5, установив соответствие между сигналом 365 КТН и рабочими циклами топливных насосов.
В некоторых примерах модули 362 и 364 могут по-разному реагировать на один и тот же сигнал 365 КТН, полученный от контроллера 360. В результате, модули 362 и 364 могут содержать различные машиночитаемые инструкции, хранимые в долговременной памяти и предназначенные для регулирования работы топливного насоса на основе сигналов, полученных от контроллера 360. Таким образом, модули 362 и 364 могут содержать различные таблицы преобразования для установления соответствия сигнала 365 КТН и рабочих циклов для соответствующих насосов 366 и 368. Таким образом, модули 362 и 364 могут по-разному управлять подкачивающими насосами 366 и 268 соответственно, при получении одного и того же командного сигнала от контроллера 360. Таким образом, два топливных подкачивающих насоса могут работать по-разному, используя один контакт на контроллере 360 для передачи команды.
На фиг. 4 показан пример способа 400 для обеспечения работы двух топливных подкачивающих насосов топливной системы (например, топливной системы 8, раскрытой выше с использованием фиг. 1-2). В частности, контроллер (например, контроллер 360 раскрытый выше с использованием фиг. 3), используя соответствующие электронные модули насосов (например, ЭМН 362 и 364, раскрытые выше с использованием фиг. 3), может регулировать количество электроэнергии, подаваемой на первый электромотор (например, электромотор 372, раскрытой выше с использованием фиг. 3) первого подкачивающего насоса (например, подкачивающего насоса 208, раскрытого выше на фиг. 2) и второй электромотор (например, второй электромотор 374, раскрытой выше с использованием фиг. 3) второго подкачивающего насоса (например, подкачивающего насоса 218, раскрытого выше на фиг. 2). Контроллер может использовать для насосов режим управления с обратной связью, на основе разности между требуемым давлением топливной рампы и измеренным давлением одной или нескольких топливных рамп (например, топливных рамп 240 и 250, раскрытых выше с использованием фиг. 2).
Таким образом, командный сигнал, сгенерированный контроллером и посланный в ЭМН для управления дополнительным количеством электроэнергии, подаваемой к подкачивающим насосам, может быть пропорционален разности между требуемым давлением топливной рампы и измеренным давлением топливной рампы. Например, командный сигнал и количество электроэнергии, подаваемой к первому подкачивающему насосу, могут быть пропорциональны разности между требуемым давлением топливной рампы и измеренным давлением топливной рампы, когда измеренное давление топливной рампы меньше требуемого давления топливной рампы. Более конкретно, командный сигнал и количество электроэнергии, подаваемое к первому подкачивающему насосу, могут монотонно увеличиваться для увеличения разности между требуемым давлением топливной рампы и измеренным давлением топливной рампы, когда измеренное давление топливной рампы меньше требуемого давления топливной рампы. Таким образом, количество электроэнергии, подаваемой к первому подкачивающему насосу, может быть пропорционально командному сигналу, посланному контроллером. Однако второй насос может не получать электроэнергию, когда командный сигнал меньше порогового значения сигнала (например, измеренное давление топливной рампы не меньше, чем требуемое давление топливной рампы на величину, превышающую пороговое значение давления). Второй насос могут включить, когда командный сигнал больше порогового значения сигнала (например, разность между давлением топливной рампы и требуемым давлением топливной рампы больше порогового значения разности давлений, и измеренное давление топливной рампы меньше требуемого давления топливной рампы).
Способ 400 начинается на шаге 402, где содержит оценку и/или измерение условий работы двигателя. Условия работы двигателя могут содержать одно или более из следующего: требуемый водителем крутящий момент, нагрузка двигателя, давление топливной рампы, уровень топлива, частота вращения двигателя, количество топлива для впрыска, впускной массовый расход воздуха и т.д. Условия работы двигателя могут оценить на основе данных, полученных от различных датчиков. Например, давление топливной рампы могут оценить на основе показаний одного или нескольких датчиков давления топливной рампы (например, датчиков 238 и 248, раскрытых выше с использованием фиг. 2). Уровень топлива в топливном баке могут оценить на основе показаний датчика уровня топлива (например, датчика 210, раскрытого выше с использованием фиг. 2).
Затем способ 400 может перейти от шага 402 к шагу 404, содержащему определение требуемого давления топлива, которое может представлять собой требуемое давление топливной рампы для впрыска топлива во впускные каналы (например, топливной рампы 240, раскрытой выше с использованием фиг. 2) и/или требуемое давление топливной рампы для прямого впрыска топлива (например, топливной рампы 250, раскрытой выше с использованием фиг. 2), на основе одного или более из следующего: давление во впускном коллекторе, расход для впрыска топлива, испаряемость топлива, частота вращения двигателя и температура топлива. Однако требуемое давление топливной рампы, дополнительно или в качестве альтернативы, может быть основано на дополнительных условиях работы двигателя, таких как положение дросселя двигателя (например, дросселя 162, показанного на фиг. 1), нагрузка двигателя, крутящий момент генератора переменного тока, давление отработавших газов, частота вращения турбонагнетателя (например, компрессора 174, показанного на фиг. 1), температура впускной системы, давление впускной системы и т.д.
Способ 400 на шаге 404 может, дополнительно или в качестве альтернативы, содержать определение требуемого расхода топлива. В частности, могут использовать упреждающий планировщик, чтобы определить требуемый расход топлива на основе количества топлива для впрыска. Таким образом, могут определить требуемый расход топлива на основе количества топлива для впрыска, заданного командой, и/или количества топлива, расходуемого из одной или нескольких топливных рамп через топливные инжекторы (например, инжекторы 242 и 252, раскрытые выше с использованием фиг. 2). Как минимум, в одном примере, требуемый расход топлива может представлять собой приблизительный расход топлива, достаточный для замещения топлива в топливной рампе, которое расходуется через топливные инжекторы.
Способ 400 может перейти от шага 404 к шагу 406, на котором может содержать генерацию командного сигнала БУТ (например, сигнала 365 КТН, раскрытого выше с использованием фиг. 3) на основе одного или более из следующего: требуемое давление топлива, разность между требуемым давлением топлива и измеренным давлением топлива и требуемый расход топлива. Таким образом, командный сигнал БУТ могут сгенерировать на основе элемента обратной связи (например, на основе разности между требуемым и измеренным давлением топливной рампы) и элемента упреждения. Командный сигнал БУТ может соответствовать рабочему циклу или сигналу напряжения, подаваемому к одному или нескольким подкачивающим насосам (например, подкачивающим насосам 208 и 218, раскрытым выше с использованием фиг. 2). Таким образом, рабочий цикл подкачивающего насоса, для которого сгенерирована команда, могут увеличить для увеличения одного или более из следующего: требуемое давление топлива, требуемый расход топлива, расход топлива для впрыска и/или разность между требуемым давлением топлива и измеренным давлением топлива, когда измеренное давление топлива меньше требуемого давления топлива. Таким образом, в примерах, где общий командный сигнал БУТ генерируют и посылают обоим ЭМН, командный сигнал БУТ могут сгенерировать на основе одного или более из следующего: элемент по давлению топлива для процесса управления с обратной связью, элемент упреждения по количеству впрыска топлива для процесса управления и, в некоторых примерах, адаптивный элемент.
Командный сигнал БУТ могут дополнительно сгенерировать на основе положения педали акселератора (например, вводного устройства 132, раскрытого выше с использованием фиг. 1). Например, во время нажатия педали акселератора, когда водитель (например, водитель 130, раскрытый выше с использованием фиг. 1) перемещает педаль акселератора на угол, превышающий пороговое значение угла, водитель требует увеличить крутящий момент и, таким образом, расход топлива для впрыска могут увеличить. Также могут увеличить требуемый расход топлива и/или требуемое давление топлива. Таким образом, в некоторых примерах способ 400 на шаге 414 может содержать определение, превышает ли требуемое водителем увеличение крутящего момента пороговое значение крутящего момента и/или происходит ли событие нажатия педали акселератора.
Командный сигнал БУТ может представлять собой электрический сигнал, который могут направить из контроллера к одному или нескольким ЭМН. В частности, командный сигнал БУТ может представлять собой напряжение и/или ток. В некоторых примерах командный сигнал БУТ может представлять собой изменяющийся во времени сигнал. В частности, командный сигнал БУТ может представлять собой импульсный сигнал напряжения. Таким образом, командный сигнал БУТ может содержать рабочий цикл. Командный сигнал БУТ могут сгенерировать посредством сумматора, на основе сигналов, полученных от планировщика давления, упреждающего планировщика, интегратора и т.д.
Затем способ 400 может перейти от шага 406 к шагу 408, на котором может содержать передачу командного сигнала БУТ на первый ЭМН (например, на первый ЭМН 362, раскрытый выше с использованием фиг. 3) и на второй ЭМН (например, на второй ЭМН 364, раскрытый выше с использованием фиг. 3). В некоторых примерах передача может содержать отправку электрического сигнала по проводу. Как указано выше в отношении фиг. 3, командный сигнал может быть импульсным или синхронизированным сигналом, который можно интерпретировать как команду задания процентной величины. В некоторых примерах способ 400 на шаге 408 может содержать отправку одного и того же сигнала на первый ЭМН и на второй ЭМН. Однако в других примерах могут послать в модули ЭМН различные командные сигналы (например, напряжения и/или рабочие циклы). Таким образом, на шаге 412 контроллер может послать командный сигнал БУТ в один или более ЭМН.
В примерах, где различные командные сигналы БУТ посылают в каждый из ЭМН, способ 400 на шаге 404 может дополнительно содержать определение, возможно ли обеспечить требуемое давление топлива и/или требуемый расход топлива первым подкачивающим насосом (например, подкачивающим насосом 208, раскрытым выше с использованием фиг. 2). Если требуемое давление топлива и/или требуемый расход топлива можно обеспечить первым подкачивающим насосом, то требуемое напряжение, которое следует подать на первый подкачивающий насос, могут определить на основе требуемого давления топлива и/или требуемого расхода топлива. Кроме того, командный сигнал БУТ могут определить на основе требуемого давления топлива и измеренного системного напряжения. Таким образом, когда необходима работа только первого подкачивающего насоса для того, чтобы обеспечить требуемое давление топлива и/или расход топлива, первый командный сигнал БУТ могут послать на первый подкачивающий насос, в соответствии с количеством электроэнергии, необходимой для подачи на первый подкачивающий насос. Кроме того, второй командный сигнал БУТ могут послать на второй ЭМН, в соответствии с рабочим циклом 0%, необходимым для второго подкачивающего насоса (например, для подкачивающего насоса 218, раскрытого выше с использованием фиг. 2). Если необходима работа обоих насосов для обеспечения требуемого давления топлива и/или расхода топлива, то первый командный сигнал БУТ, соответствующий приблизительно рабочему циклу 100% для первого подкачивающего насоса, могут послать на первый ЭМН. Второй командный сигнал БУТ могут определить и послать на второй ЭМН в соответствии с рабочим циклом, необходимым для второго подкачивающего насоса. Второй командный сигнал БУТ могут определить на основе требуемого давления топлива и/или требуемого расхода топлива.
Затем способ 400 переходит от шага 408 к шагу 410, на котором содержит расшифровку командного сигнала БУТ в первом ЭМН и во втором ЭМН. Таким образом, способ 400 на шаге 410 может содержать получение командного сигнала БУТ в первом ЭМН и во втором ЭМН.
Затем способ 400 может перейти от шага 410 к шагу 412, на котором содержит определение первого рабочего цикла первого подкачивающего насоса на основе командного сигнала БУТ в первом ЭМН. Таким образом, на основе полученного командного сигнала БУТ, первый ЭМН может определить первый рабочий цикл первого подкачивающего насоса. В частности, первый ЭМН может содержать машиночитаемые инструкции для преобразования командного сигнала БУТ в напряжение рабочего цикла, необходимое для подачи на первый подкачивающий насос. Примеры рабочих циклов первого подкачивающего насоса показаны более подробно ниже на фиг. 5. Первый рабочий цикл первого подкачивающего насоса может в некоторых примерах быть пропорционален командному сигналу БУТ. Таким образом, первый рабочий цикл первого подкачивающего насоса могут увеличить для увеличения одного или более из следующего: требуемое давление топлива, разность между требуемым давлением топлива и измеренным давлением топлива и требуемый расход топлива.
Затем способ 400 может перейти от шага 412 к шагу 414, который содержит подачу электроэнергии на первый электромотор первого подкачивающего насоса в соответствии с рабочим циклом, определенным на шаге 412. Таким образом, первый ЭМН может подавать электроэнергию на первый электромотор (например, на электромотор 372, раскрытый выше с использованием фиг. 3) первого подкачивающего насоса. Количество электроэнергии, подаваемой на первый электромотор, могут отрегулировать в первом ЭМН.
Затем способ 400 может перейти от шага 414 к шагу 416, на котором содержит определение второго рабочего цикла второго подкачивающего насоса на основе командного сигнала БУТ во втором ЭМН. Таким образом, на основе полученного командного сигнала БУТ, второй ЭМН может определить второй рабочий цикл второго подкачивающего насоса. В частности, второй ЭМН может содержать машиночитаемые инструкции для преобразования командного сигнала БУТ в напряжение рабочего цикла, необходимое для подачи на второй подкачивающий насос. Однако второй ЭМН может преобразовать командный сигнал БУТ в напряжение рабочего цикла, отличное от напряжения, подаваемого на первый ЭМН. Примеры рабочих циклов второго подкачивающего насоса показаны более подробно ниже на фиг. 5.
Затем способ 400 может перейти от шага 416 к шагу 418, который содержит определение, требуется ли включение второго подкачивающего насоса. Определение необходимости включения второго подкачивающего насоса могут выполнить на основе командного сигнала БУТ, полученного во втором ЭМН. Таким образом, второй ЭМН может на основе машиночитаемых инструкций, хранимых в долговременной памяти второго ЭМН, преобразовать командный сигнал БУТ в напряжение рабочего цикла, необходимое для подачи на второй подкачивающий насос. Необходимость включения второго подкачивающего насоса может появиться, когда рабочий цикл командного сигнала БУТ больше порогового значения, где пороговое значение может представлять собой рабочий цикл командного сигнала БУТ, при котором первый рабочий цикл первого подкачивающего насоса равен по существу 100%. Таким образом, необходимость включения второго подкачивающего насоса может появиться, когда первый рабочий цикл первого подкачивающего насоса равен или больше первого порогового значения, и все еще требуется обеспечить дополнительное давление топлива. В некоторых примерах первое пороговое значение может составить приблизительно 100%. Таким образом, второй подкачивающий насос могут включить, когда первый подкачивающий насос работает с подачей максимального количества электроэнергии, но этого недостаточно, чтобы обеспечить требуемое давление топлива и/или требуемый расход топлива. Однако в других примерах первое пороговое значение рабочего цикла первого подкачивающего насоса может составить менее 100%, причем второй насос могут оставить выключенным, если не превышено это пороговое значение. Таким образом, второй рабочий цикл второго подкачивающего насоса может быть по существу равен 0%, когда рабочий цикл первого подкачивающего насоса меньше первого порогового значения рабочего цикла.
Например, командный сигнал БУТ может быть больше порогового значения командного сигнала, когда величина требуемого водителем крутящего момента увеличивается выше порогового значения крутящего момента. Таким образом, определение необходимости включения подкачивающего насоса на шаге 418 может содержать определение, превышает ли требуемое водителем увеличение крутящего момента пороговое значение. Например, во время нажатия педали акселератора, когда водитель (например, водитель 130, раскрытый выше с использованием фиг. 1) перемещает педаль акселератора (например, вводное устройство 132, раскрытое выше с использованием фиг. 1) на угол, превышающий пороговое значение угла, величина требуемого водителем крутящего момента может увеличиться на величину, превышающую пороговое значение крутящего момента. Таким образом, может возникнуть необходимость включить второй подкачивающий насос в качестве реакции на нажатие педали акселератора и/или когда величина требуемого водителем крутящего момента превышает пороговое значение крутящего момента.
Дополнительно или в качестве альтернативы командный сигнал БУТ может быть больше порогового значения командного сигнала, когда требуемое количество топлива для впрыска увеличивается выше порогового значения количества. Например, когда водитель потребовал увеличения крутящего момента, требуемое количество топлива для впрыска может увеличиться для обеспечения требуемого крутящего момента. Когда требуемое количество топлива для впрыска возрастает на величину, превышающую пороговое значение количества, работы первого подкачивающего насоса может оказаться недостаточно, чтобы обеспечить требуемый расход топлива в топливную рампу и поддерживать давление топливной рампы и/или заместить объем и/или массу топлива, израсходованного на впрыск топлива. Таким образом, определение необходимости включения подкачивающего насоса может содержать определение, превышает ли количество топлива для впрыска пороговое значение количества и/или превышает ли требуемый расход топлива в одной или нескольких топливных рампах пороговое значение расхода. Если количество топлива для впрыска превышает пороговое значение количества и/или требуемый расход топлива (объемный или массовый расход) в топливную рампу от подкачивающих насосов превышает пороговое значение расхода, то способ 400 может перейти от шага 418 к шагу 422, и второй подкачивающий насос могут включить для достижения требуемого расхода топлива в топливные рампы.
Дополнительно или в качестве альтернативы командный сигнал БУТ может превысить пороговое значение командного сигнала, когда требуемое давление топливной рампы превышает пороговое значение давления. Таким образом, определение необходимости включения подкачивающего насоса может содержать определение, превышает ли требуемое давление топлива пороговое значение давления. Таким образом, в некоторых примерах подкачивающий насос могут включить, когда требуемое давление топливной рампы превышает пороговое значение давления.
Дополнительно или в качестве альтернативы командный сигнал БУТ может превысить пороговое значение командного сигнала, когда разность между требуемым давлением топливной рампы и измеренным давлением топлива больше порогового значения разности. Таким образом, определение необходимости включения подкачивающего насоса может содержать определение, превышает ли разность между требуемым давлением топливной рампы и измеренным давлением топливной рампы пороговое значение разности. Таким образом, в некоторых примерах может возникнуть необходимость включить второй подкачивающий насос, когда разность между требуемым давлением топливной рампы и измеренным давлением топливной рампы больше порогового значения разности.
В других примерах способ 400 на шаге 418 может содержать предсказание будущих изменений давления топливной рампы, на основе текущих расходов топлива от одного или более из следующего: подкачивающие насосы, количества топлива для впрыска и предсказанное будущее требование водителя по крутящему моменту. Например, во время нажатия педали акселератора количество топлива для впрыска может увеличиться, и в будущем давление топливной рампы может уменьшиться в результате увеличения количества топлива для впрыска. Таким образом, на основе предсказанного количества топлива для впрыска, которое может быть предсказано на основе одного или более из следующего: будущее требование водителя по крутящему моменту, будущие нагрузки двигателя, будущие дополнительные нагрузки, будущие профили давления наддува и т.д., могут сгенерировать будущие профили давления топливной рампы на основе текущей работы подкачивающих насосов. В некоторых примерах, если предсказано, что давление топливной рампы уменьшится ниже требуемого давления топливной рампы на величину, превышающую пороговое значение разности давлений, то способ 400 может перейти от шага 418 к шагу 422, и может включить второй подкачивающий насос для того, чтобы давление топливной рампы не уменьшилось ниже требуемого давления топливной рампы на величину, превышающую пороговое значение разности давлений. Таким образом, второй подкачивающий насос могут включить с целью уменьшения и/или предотвращения снижения давления топливной рампы.
Если шаге 418 определено, что не требуется включать второй подкачивающий насос, то способ 400 может перейти от шага 418 к шагу 420, который содержит поддерживание второго подкачивающего насоса в выключенном состоянии. Затем способ 400 завершается.
Однако если на шаге 418 определено, что требуется включить второй подкачивающий насос, то способ 400 может перейти к шагу 422, который содержит подачу электроэнергии на второй электромотор (например, на электромотор 374, раскрытый выше с использованием фиг. 3) второго подкачивающего насоса согласно второму рабочему циклу. Второй рабочий цикл второго подкачивающего насоса могут увеличить от 0% до второго порогового значения рабочего цикла, например, 50%, когда первый рабочий цикл первого подкачивающего насоса равен и/или превышает первое пороговое значение рабочего цикла. Однако в других примерах второй пороговый рабочий цикл второго подкачивающего насоса может быть больше или меньше, чем 50%. В некоторых примерах второй пороговый рабочий цикл второго подкачивающего насоса может составить 100%. Таким образом, второй подкачивающий насос может или работать с рабочим циклом 0% или с рабочим циклом 100%. Количество электроэнергии, подаваемой на второй электромотор, могут отрегулировать посредством второго ЭМН. Затем способ 400 завершается.
На фиг. 5 показан пример графиков, устанавливающих соответствие между рабочим циклом подкачивающего насоса и командными сигналами БУТ для топливной системы (например, для топливной системы 8, раскрытой выше с использованием фиг. 1-2), в том числе, для меньшего первого подкачивающего насоса (например, для подкачивающего насоса 366, раскрытого выше с использованием фиг. 3) и большего второго подкачивающего насоса (например, для подкачивающего насоса 368, раскрытого выше с использованием фиг. 3). В частности, на фиг. 5 показан первый график 500 и второй график 525, изображающие первый пример управляющей схемы для регулирования рабочих циклов первого подкачивающего насоса и второго подкачивающего насоса соответственно, в качестве реакции на изменения командного сигнала БУТ. Кроме того, третий график 550 и четвертый график 575 изображают второй пример управляющей схемы для регулирования рабочих циклов первого подкачивающего насоса и второго подкачивающего насоса соответственно, в качестве реакции на изменения командного сигнала БУТ.
На графиках 500, 525, 550 и 575 рабочий цикл показан вдоль вертикальной оси, а командный сигнал БУТ показан вдоль горизонтальной оси. Как раскрыто выше с использованием фиг. 3-4, командный сигнал БУТ может соответствовать сигналу, посланному контроллером (например, контроллером 360, раскрытым выше с использованием фиг. 3) на соответствующие ЭМН (например, на ЭМН 362 и 364, раскрытые выше с использованием фиг. 3) подкачивающих насосов. Рабочий цикл может представлять собой рабочий цикл для подкачивающих насосов. Таким образом, рабочий цикл 1 может соответствовать сигналу напряжения рабочего цикла 100%. Рабочий цикл 0 может соответствовать отсутствию подачи электроэнергии (например, сигнал напряжения рабочего цикла 0%). Таким образом, рабочий цикл может соответствовать шкале от 0, что указывает на работу с низкой нагрузкой или на состояние «выключен», до 1, что указывает на работу с максимальной мощностью электропитания, подаваемого на указанный подкачивающий насос.
Графики 500 и/или 550 могут быть сохранены в качестве таблицы преобразования в долговременной памяти первого ЭМН (например, первого ЭМН 362, раскрытого выше с использованием фиг. 3), регулирующего рабочий цикл первого подкачивающего насоса. Таким образом, первый ЭМН может использовать таблицу преобразования, например, один из графиков 500 или 550 для преобразования командного сигнала БУТ, полученного от контроллера, в рабочий цикл для первого подкачивающего насоса.
Подобным образом графики 525 и 575 могут быть сохранены в качестве таблицы преобразования в долговременной памяти второго ЭМН (например, второго ЭМН 364, раскрытого выше с использованием фиг. 3), регулирующего рабочий цикл второго подкачивающего насоса. Таким образом, второй ЭМН может использовать таблицу преобразования, например, один из графиков 525 или 575 для преобразования командного сигнала БУТ, полученного от контроллера, в рабочий цикл для второго подкачивающего насоса.
В первой управляющей схеме, как показано на графиках 500 и 525, рабочий цикл первого подкачивающего насоса может быть непосредственно пропорционален командному сигналу БУТ. Затем, как только рабочий цикл первого подкачивающего насоса достигает порогового значения (например, рабочего цикла 100%) и/или командный сигнал БУТ достигает порогового значения (например, рабочего цикла 99%), второй подкачивающий насос могут включить на максимальном напряжении рабочего цикла. Как показано на примере графика 500, первый подкачивающий насос может работать непрерывно, что обозначено линейным соотношением между командным сигналом БУТ и рабочим циклом первого подкачивающего насоса. Поскольку рабочий цикл для команды БУТ увеличивается, рабочий цикл первого подкачивающего насоса может пропорционально увеличиться. На втором примере, на графике 525, второй подкачивающий насос могут выключить и не подавать на него электроэнергию, пока командный сигнал БУТ меньше порогового значения сигнала. В примере на фиг. 4, пороговое значение может представлять собой команду БУТ 99%. Однако в других примерах пороговое значение может составить менее 99%. Таким образом, второй подкачивающий насос могут включить на верхнем пределе напряжения командного сигнала БУТ, но ниже верхнего предела могут выключить.
Во второй управляющей схеме, как показано на графиках 550 и 575, рабочий цикл первого подкачивающего насоса может достигнуть 100%, когда командный сигнал БУТ достигает порогового значения (например, сигнала БУТ рабочего цикла 50%, как изображено на графике 550). Кроме того рабочий цикл второго подкачивающего насоса могут увеличить от 0% до порогового значения (например, рабочего цикла 50%, как изображено на графике 575), когда рабочий цикл первого подкачивающего насоса достигает 100% и/или командный сигнал БУТ достигает порогового значения сигнала. Затем рабочий цикл второго подкачивающего насоса могут увеличивать пропорционально в соответствии с продолжением увеличения рабочего цикла командного сигнала БУТ выше порогового значения.
Таким образом, второй подкачивающий насос могут оставить выключенным, когда рабочий цикл первого подкачивающего насоса меньше порогового значения (например, рабочего цикла 100%). Первый ЭМН может преобразовать командный сигнал БУТ в рабочий цикл 100%, когда рабочий цикл командного сигнала БУТ больше первого порогового значения. Кроме того, второй ЭМН может преобразовать командный сигнал БУТ в рабочий цикл 0%, когда рабочий цикл командного сигнала БУТ меньше первого порогового значения. Когда командный сигнал БУТ достигает первого порогового значения, ЭМН может увеличить рабочий цикл второго подкачивающего насоса от 0% до второго порогового значения рабочего цикла в качестве реакции на командный сигнал БУТ, достигающий первого порогового значения. Таким образом, второй подкачивающий насос могут включить для командных сигналов БУТ, превышающих первое пороговое значение, когда первый подкачивающий насос работает на максимальной мощности.
На фиг. 6 показан пример диаграммы 600, иллюстрирующей работу двух подкачивающих насосов (например, подкачивающих насосов 366 и 368, раскрытых выше с использованием фиг. 3) при изменяющихся условиях работы двигателя, в качестве примера. Горизонтальная ось (ось X) обозначает время. Первый график 602 показывает изменения положения педали и, таким образом, изменения требуемого водителем крутящего момента в течение некоторого времени. Второй график 604 показывает изменения измеренного давления топливной рампы в течение некоторого времени. Давление топливной рампы могут измерить посредством одного или нескольких датчиков давления топливной рампы (например, датчиков давления 238 и 248 топливной рампы, раскрытых выше с использованием фиг. 2). Третий график 606 показывает изменения требуемого давления топливной рампы, определенные на основе требуемого водителем крутящего момента и/или условий работы двигателя. График 608 показывает изменения командного сигнала БУТ (например, сигнала постоянного тока) в течение некоторого времени, график 610 показывает изменения напряжения, подаваемого на первый подкачивающий насос (например, на подкачивающий насос 366, раскрытый выше с использованием фиг. 3) как процентное значение от максимального напряжения, подаваемого на первый подкачивающий насос, и график 614 показывает изменения напряжения, подаваемого на второй подкачивающий насос (например, на второй подкачивающий насос 368, раскрытый выше с использованием фиг. 3), как процентное значение от максимального напряжения, подаваемого на второй подкачивающий насос.
До момента времени t1 двигатель работает по существу с постоянной частотой вращения. В момент времени t1 водитель нажимает педаль акселератора, от положения отпущенной педали, сигнализируя об увеличении требуемого водителем крутящего момента. Поскольку топливо впрыскивают в двигатель для увеличения крутящего момента двигателя, давление топливной рампы уменьшается, и, таким образом, требуемое давление топливной рампы соответственно увеличивают, как обозначено на графике 606, чтобы учесть увеличение потребления топлива и уменьшение давления топливной рампы. Поскольку измеренное давление топливной рампы уменьшается ниже требуемого давления топливной рампы, контроллер (например, контроллер 360, раскрытый выше с использованием фиг. 3) может послать командный сигнал на один или более ЭМН, указав на увеличение требуемого расхода топлива. Затем электронные модули насосов определяют рабочие циклы насосов для подкачивающих насосов, как раскрыто на фиг. 3. Рабочий цикл первого подкачивающего насоса может быть приблизительно линейным относительно командного сигнала БУТ. В момент времени t-, второй насос оставляют выключенным, поскольку командный сигнал БУТ остается ниже порогового значения сигнала. В некоторых примерах порог может составить 100%. Однако в других примерах порог может составить менее 100%.
В момент времени t2 водитель отпускает педаль акселератора, сигнализируя об уменьшении требуемого водителем крутящего момента. Требуемое давление топливной рампы, таким образом, соответственно уменьшают. Из-за уменьшения количества топлива для впрыска, командный сигнал БУТ аналогичным образом уменьшают. Как и до момента времени t1, второй подкачивающий насос оставляют выключенным, в то время как первый подкачивающий насос поддерживает требуемое давление топлива. В момент времени t3 водитель отпускает педаль акселератора, сигнализируя об уменьшении требуемого водителем крутящего момента. Требуемое давление топливной рампы уменьшают, командный сигнал БУТ и соответствующий рабочий цикл первого подкачивающего насоса уменьшают. Второй подкачивающий насос оставляют выключенным. В момент времени t4 водитель нажимает педаль акселератора, чтобы двигатель работал в условиях более высокой нагрузки двигателя, приводящих к увеличению требуемого количества топлива для впрыска. В результате необходимо увеличение давления топливной рампы, поскольку давление топливной рампы уменьшается в результате выхода топлива из топливной рампы при увеличении количества топлива для впрыска. Из-за уменьшения давления топливной рампы командный сигнал БУТ устанавливают как команду 100% и в результате и первый, и второй топливный насосы включают и управляют ими на их максимальных напряжениях и/или рабочих циклах. Между моментами времени t4 и t5 второй подкачивающий насос работает в импульсном режиме в то время, когда первый подкачивающий насос не может обеспечить требуемое давление топливной рампы без дополнительного давления, обеспеченного вторым топливный насосом.
В момент времени t5 водитель отпускает педаль акселератора, переходя к условиям работы двигателя вхолостую и уменьшая количество топлива для впрыска. Требуемое давление топливной рампы аналогичным образом уменьшают в качестве реакции на отпускание водителем педали акселератора. Давление топливной рампы может продолжать увеличиваться в результате работы первого подкачивающего насоса при уменьшении количества топлива для впрыска. Однако оба подкачивающих насоса могут выключить, когда измеренное давление топливной рампы превысит требуемое давление топливной рампы. В момент времени t6 водитель нажимает педаль акселератора, постепенно увеличивая положение педали. Поскольку положение педали увеличивается, также увеличивается требуемый крутящий момент и количество топлива для впрыска. Рабочий цикл первого подкачивающего насоса увеличивают, чтобы обеспечить требуемое давление топливной рампы. Второй насос могут оставить выключенным. В момент времени t7 водитель отпускает педаль акселератора, переходя к условиям работы двигателя вхолостую. Аналогичным образом, уменьшают требуемое количество топлива для впрыска. Рабочий цикл первого подкачивающего насоса могут продолжать регулировать, поддерживая давление топливной рампы по существу равное требуемому давлению топливной рампы. В то время как двигатель находится в условиях холостого хода, второй подкачивающий насос могут оставить выключенным.
Таким образом, технический эффект от более точного поддержания давления топливной рампы для соответствия требуемому давлению топливной рампы достигается за счет различного регулирования работы двух подкачивающих насосов на основе общей входной команды от контроллера двигателя. Кроме того, технический эффект сокращения расхода топлива достигается за счет регулирования работы меньшего подкачивающего насоса, когда разность между требуемым давлением топливной рампы и измеренным давлением топливной рампы меньше порогового значения разности. Таким образом, за счет работы и первого подкачивающего насоса, и второго подкачивающего насоса, только когда разность между требуемым давлением топливной рампы и измеренным давлением топливной рампы больше порогового значения разности, может быть уменьшено потребление энергии, а срок службы подкачивающего насоса может быть увеличен. Кроме того, количество аппаратных средств в виде электропроводки и средств обработки данных может быть уменьшено при раздельном управлении двумя подкачивающими насосами, с использованием одной и той же входной команды от контроллера двигателя.
В одном варианте реализации способ может содержать регулирование работы первого подкачивающего насоса на основе разности между требуемым давлением топливной рампы и измеренным давлением топливной рампы, и, в качестве реакции на одно или более из следующего: нажатие педали акселератора, увеличение требуемого давления топливной рампы выше порогового значения давления, и увеличение разности между требуемым давлением топливной рампы и измеренным давлением топливной рампы на величину, превышающую пороговое значение разности давлений, включение второго подкачивающего насоса. В любых, одной или нескольких комбинациях вышеуказанных способов, регулирование работы первого подкачивающего насоса может содержать регулирование количества электроэнергии, подаваемой на мотор первого подкачивающего насоса. В любых, одной или нескольких комбинациях вышеуказанных способов, регулирование количества электроэнергии, подаваемой на мотор первого подкачивающего насоса, может содержать монотонное увеличение количества электроэнергии для увеличения разности между требуемым давлением топливной рампы и измеренным давлением топливной рампы, когда измеренное давление топливной рампы меньше требуемого давления топливной рампы. В любых, одной или нескольких комбинациях вышеуказанных способов, регулирование работы первого подкачивающего насоса может содержать регулирование рабочего цикла первого подкачивающего насоса. Любые, одна или несколько комбинаций вышеуказанных способов могут дополнительно содержать, выключение первого подкачивающего насоса в качестве реакции на увеличение измеренного давления топливной рампы выше требуемого давления топливной рампы. Любые, одна или несколько комбинаций вышеуказанных способов, могут дополнительно содержать выключение второго подкачивающего насоса и продолжение подачи электроэнергии только на первый подкачивающий насос в качестве реакции на уменьшение разности между требуемым давлением топливной рампы и измеренным давлением топливной рампы ниже порогового значения разности. В любых, одной или нескольких комбинациях вышеуказанных способов включение второго подкачивающего насоса может содержать увеличение количества электроэнергии, подаваемой на второй подкачивающий насос, до максимального количества электроэнергии. В любых, одной или нескольких комбинациях вышеуказанных способов, первый подкачивающий насос может быть меньше, чем второй подкачивающий насос, и причем первое максимальное количество электроэнергии для первого подкачивающего насоса может быть меньше, чем второе максимальное количество электроэнергии для второго подкачивающего насоса. В любых, одной или нескольких комбинациях вышеуказанных способов требуемое давление топливной рампы могут определить на основе одного или более из следующего: требуемый водителем крутящий момент, нагрузка двигателя, дополнительная нагрузка, массовый расход воздуха, массовый расход топлива для впрыска и давление наддува.
В другом варианте реализации способ может содержать генерацию команды для топливного насоса на основе одного или более из следующего: требуемое давление топлива, разность между требуемым давлением топлива и измеренным давлением топлива и количество топлива для впрыска; определение первого рабочего цикла для первого подкачивающего насоса на основе команды для топливного насоса; определение второго рабочего цикла для второго подкачивающего насоса на основе команды для топливного насоса и регулирование работы первого и второго подкачивающих насосов на основе первого и второго рабочих циклов соответственно. В любых, одной или нескольких комбинациях вышеуказанных способов давление топливной рампы могут измерять на основе показаний одного или нескольких датчиков давления топливной рампы, расположенных внутри топливной рампы. В любых, одной или нескольких комбинациях вышеуказанных способов первый рабочий цикл может отличаться от второго рабочего цикла. В любых, одной или нескольких комбинациях вышеуказанных способов требуемое давление топлива могут определить на основе одного или более из следующего: требуемый водителем крутящий момент, частота вращения двигателя, впускной массовый поток воздуха, испаряемость топлива и температура топлива. В любых, одной или нескольких комбинациях вышеуказанных способов второй рабочий цикл может быть по существу равен нулю процентов, таким образом, что никакую электроэнергию не подают на второй подкачивающий насос, когда команда для топливного насоса меньше первого порогового значения команды, и причем второй рабочий цикл могут увеличить от 0% до второго порогового значения рабочего цикла, когда команда для топливного насоса больше первого порогового значения команды. В любых, одной или нескольких комбинациях вышеуказанных способов первый рабочий цикл может быть пропорционален команде для топливного насоса. В любых, одной или нескольких комбинациях вышеуказанных способов первый рабочий цикл может быть по существу равен нулю процентов, таким образом, что никакую электроэнергию не подают на первый подкачивающий насос, когда разность между измеренным давлением топливной рампы и требуемым давлением топливной рампы меньше порогового значения разности.
В другом варианте реализации способ может содержать: оценку требуемого увеличения давления топливной рампы на основе разности между измеренным давлением топливной рампы и требуемым давлением топливной рампы, определение первого рабочего цикла для первого подкачивающего насоса на основе требуемого увеличения давления топливной рампы, определение второго рабочего цикла для второго подкачивающего насоса на основе требуемого увеличения давления топливной рампы и регулирование работы первого и второго подкачивающих насосов на основе первого и второго рабочих циклов соответственно. В любых, одной или нескольких комбинациях вышеуказанных способов, давление топливной рампы могут измерять на основе показаний одного или нескольких датчиков давления топливной рампы, расположенных внутри топливной рампы. В любых, одной или нескольких комбинациях вышеуказанных способов, первый рабочий цикл может отличаться от второго рабочего цикла, когда разность между измеренным давлением топливной рампы и требуемым давлением топливной рампы меньше порогового значения разности. В любых, одной или нескольких комбинациях вышеуказанных способов первый рабочий цикл может быть по существу таким же, как и второй рабочий цикл, когда разность между измеренным давлением топливной рампы и требуемым давлением топливной рампы больше порогового значения разности. В любых, одной или нескольких комбинациях вышеуказанных способов, второй рабочий цикл может быть по существу равен нулю процентов, таким образом, что никакую электроэнергию не подают на второй подкачивающий насос, когда разность между измеренным давлением топливной рампы и требуемым давлением топливной рампы меньше порогового значения разности, и причем второй рабочий цикл по существу равен 100 процентов, и подают максимальное количество электроэнергии на второй подкачивающий насос, когда разность между измеренным давлением топливной рампы и требуемым давлением топливной рампы больше порогового значения разности. В любых, одной или нескольких комбинациях вышеуказанных способов первый рабочий цикл может быть пропорционален разности между измеренным давлением топливной рампы и требуемым давлением топливной рампы, когда измеренное давление топливной рампы меньше требуемого давления топливной рампы. В любых, одной или нескольких комбинациях вышеуказанных способов первый рабочий цикл может быть по существу равен нулю процентов, таким образом, что никакую электроэнергию не подают на первый подкачивающий насос, когда разность между измеренным давлением топливной рампы и требуемым давлением топливной рампы меньше порогового значения разности.
В другом варианте реализации, топливная система может содержать: первый подкачивающий насос, второй подкачивающий насос, первый модуль подкачивающего насоса для регулирования первого рабочего цикла первого подкачивающего насоса, второй модуль подкачивающего насоса для регулирования второго рабочего цикла второго подкачивающего насоса и контроллер, имеющий возможность электрической связи с первым и вторым модулями подкачивающих насосов, причем контроллер может содержать машиночитаемые инструкции, хранимые в долговременной памяти для следующего: генерация командного сигнала для подкачивающего насоса, на основе разности между требуемым давлением топливной рампы и измеренным давлением топливной рампы, и передача командного сигнала для подкачивающего насоса на первый модуль подкачивающего насоса и на второй модуль подкачивающего насоса. В любых, одной или нескольких комбинациях вышеуказанной системы контроллер может быть электрически соединен с первым и вторым модулями подкачивающих насосов посредством единственного провода и единственного контакта. В любых, одной или нескольких комбинациях вышеуказанных систем первый модуль подкачивающего насоса может содержать машиночитаемые инструкции, хранимые в долговременной памяти, для регулирования первого рабочего цикла первого подкачивающего насоса, на основе командного сигнала для подкачивающего насоса, полученного от контроллера, и причем инструкции могут содержать: уменьшение первого рабочего цикла до нуля процентов и выключение первого подкачивающего насоса в качестве реакции на увеличение измеренного давления топливной рампы выше требуемого давления топливной рампы, и увеличение первого рабочего цикла в диапазоне между 0% и 100% пропорционально увеличению разности между измеренным давлением топливной рампы и требуемым давлением топливной рампы, когда измеренное давление топливной рампы меньше требуемого давления топливной рампы. В любых, одной или нескольких комбинациях вышеуказанных систем второй модуль подкачивающего насоса может содержать машиночитаемые инструкции, хранимые в долговременной памяти, для регулирования второго рабочего цикла второго подкачивающего насоса, на основе командного сигнала для подкачивающего насоса, полученного от контроллера, и причем инструкции могут содержать: уменьшение первого рабочего цикла до нуля процентов и выключение второго подкачивающего насоса в качестве реакции на уменьшение разности между измеренным давлением топливной рампы и требуемым давлением топливной рампы ниже порогового значения разности, когда измеренное давление топливной рампы меньше требуемого давления топливной рампы, и увеличение первого рабочего цикла в диапазоне от 0% до 100%, только когда измеренное давление топливной рампы меньше требуемого давления топливной рампы на величину, превышающую пороговое значение разности давлений.
В другом варианте реализации способ регулирования работы многотопливного подкачивающего насоса может содержать регулирование работы первого подкачивающего насоса на большей части его рабочего диапазона, в то время как другой подкачивающий насос выключен, и затем работу обоих насосов только для обеспечения самого высокого расхода, где второй подкачивающий насос или полностью включают, или полностью выключают без использования каких-либо других режимов работы, кроме перехода от одного режима к другому режиму.
Следует понимать, что конфигурации и алгоритмы, раскрытые в настоящей заявке, носят иллюстративный характер, и что эти конкретные варианты осуществления изобретения не следует рассматривать в качестве ограничения, так как возможны многочисленные модификации. Например, вышеизложенная технология может быть применена в двигателях с конфигурацией цилиндров V-6, I-4, I-6, V-12, с 4-мя оппозитными цилиндрами и в двигателях других типов. Предмет настоящего изобретения включает в себя все новые и неочевидные комбинации и подкомбинации различных систем и конфигураций, а также другие отличительные признаки, функции и/или свойства, раскрытые в настоящей заявке.
В нижеследующей формуле изобретения, в частности, указаны определенные комбинации и подкомбинации, которые считаются новыми и неочевидными. В таких пунктах формулы изобретения ссылка может быть сделана на «некоторый» элемент или «первый» элемент или эквивалент такого элемента. Следует понимать, что такие пункты формулы изобретения могут включать в себя один или более указанных элементов, не требуя и не исключая двух или более таких элементов. Иные комбинации и подкомбинации раскрытых отличительных признаков, функций, элементов и/или свойств могут быть включены в формулу путем изменения имеющихся пунктов формулы изобретения или путем представления новых пунктов формулы изобретения в настоящей или родственной заявке. Такие пункты формулы изобретения, независимо от того, являются ли они более широкими, более узкими, эквивалентными или отличающимися в отношении объема идеи первоначальной формулы изобретения, также считаются включенными в предмет настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА УПРАВЛЕНИЯ ВСАСЫВАЮЩИМ НАСОСОМ | 2015 |
|
RU2702953C2 |
| УПРАВЛЕНИЕ ВСПРЫСКОМ ТОПЛИВА | 2017 |
|
RU2685783C2 |
| СПОСОБ ДЛЯ ТОПЛИВНОЙ СИСТЕМЫ (ВАРИАНТЫ) И ТОПЛИВНАЯ СИСТЕМА | 2015 |
|
RU2710450C2 |
| СПОСОБ (ВАРИАНТЫ) УПРАВЛЕНИЯ ВПРЫСКОМ ТОПЛИВА | 2017 |
|
RU2688068C2 |
| Способ (варианты) и система для управления системой впрыска топлива | 2016 |
|
RU2723641C2 |
| СПОСОБ РАЗГРУЗКИ ДАВЛЕНИЯ В ТОПЛИВНОЙ РАМПЕ НЕПОСРЕДСТВЕННОГО ВПРЫСКА (ВАРИАНТЫ) И ТОПЛИВНАЯ СИСТЕМА | 2017 |
|
RU2727942C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ДВОЙНОГО ВПРЫСКА ТОПЛИВА | 2016 |
|
RU2717863C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ВПРЫСКА ТОПЛИВА С ПОСТОЯННЫМ И ПЕРЕМЕННЫМ ДАВЛЕНИЕМ | 2015 |
|
RU2710442C2 |
| НАСОСНАЯ СИСТЕМА (ВАРИАНТЫ) И СПОСОБ НЕПОСРЕДСТВЕННОГО ВПРЫСКА ТОПЛИВА | 2016 |
|
RU2715945C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ВПРЫСКА ТОПЛИВА ПРИ ПОСТОЯННОМ И ПЕРЕМЕННОМ ДАВЛЕНИИ | 2015 |
|
RU2706872C2 |
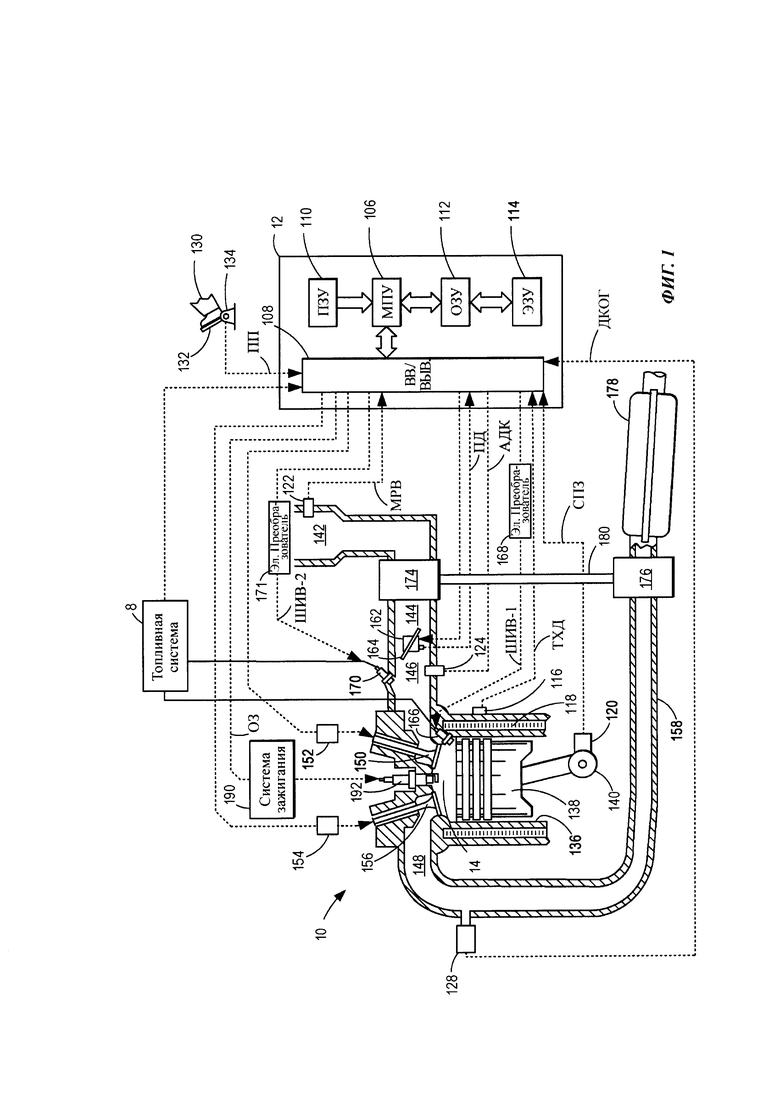
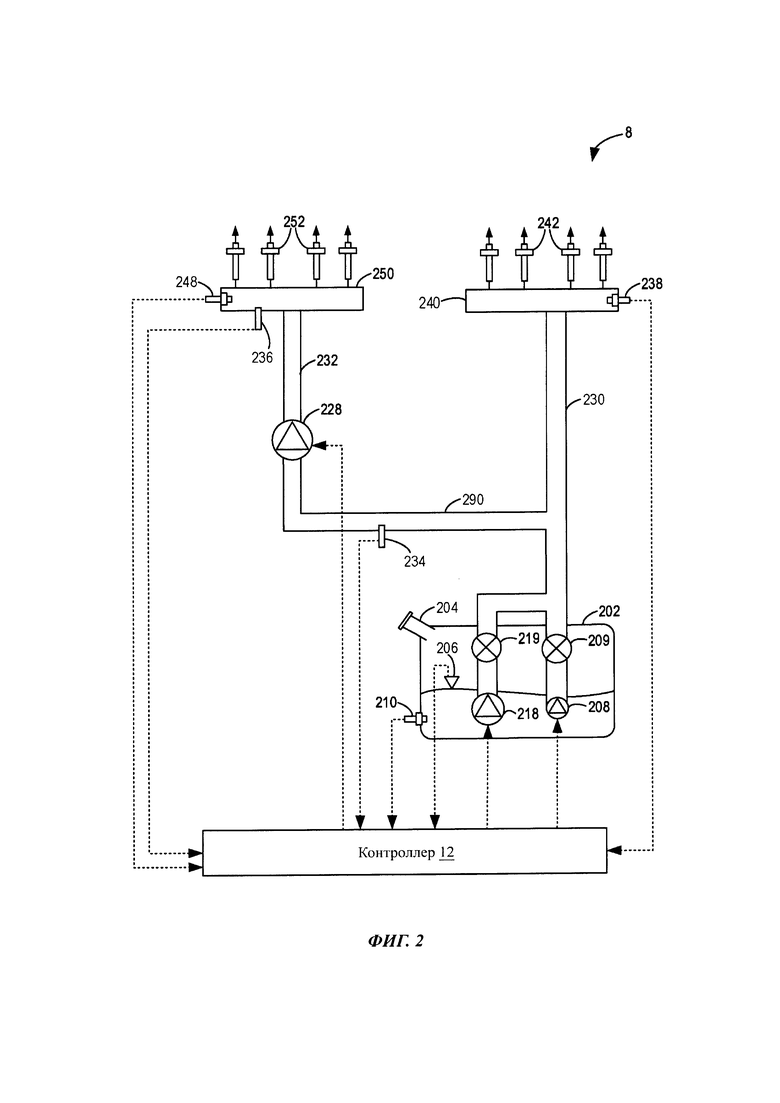


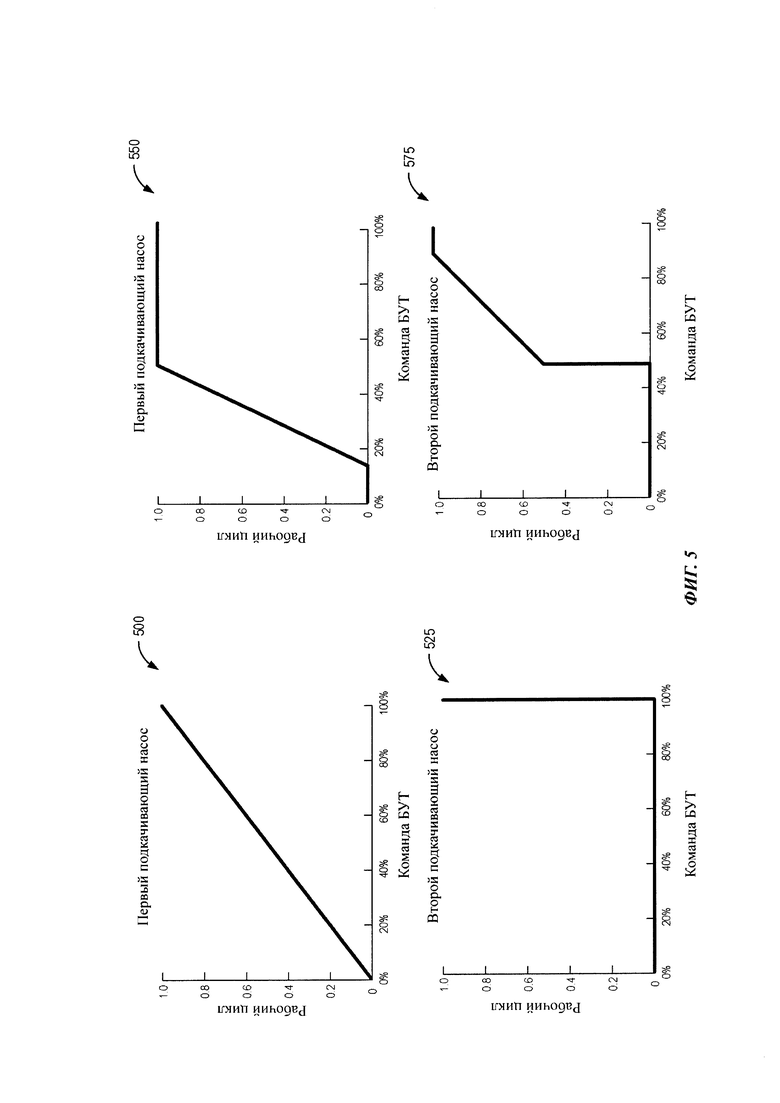
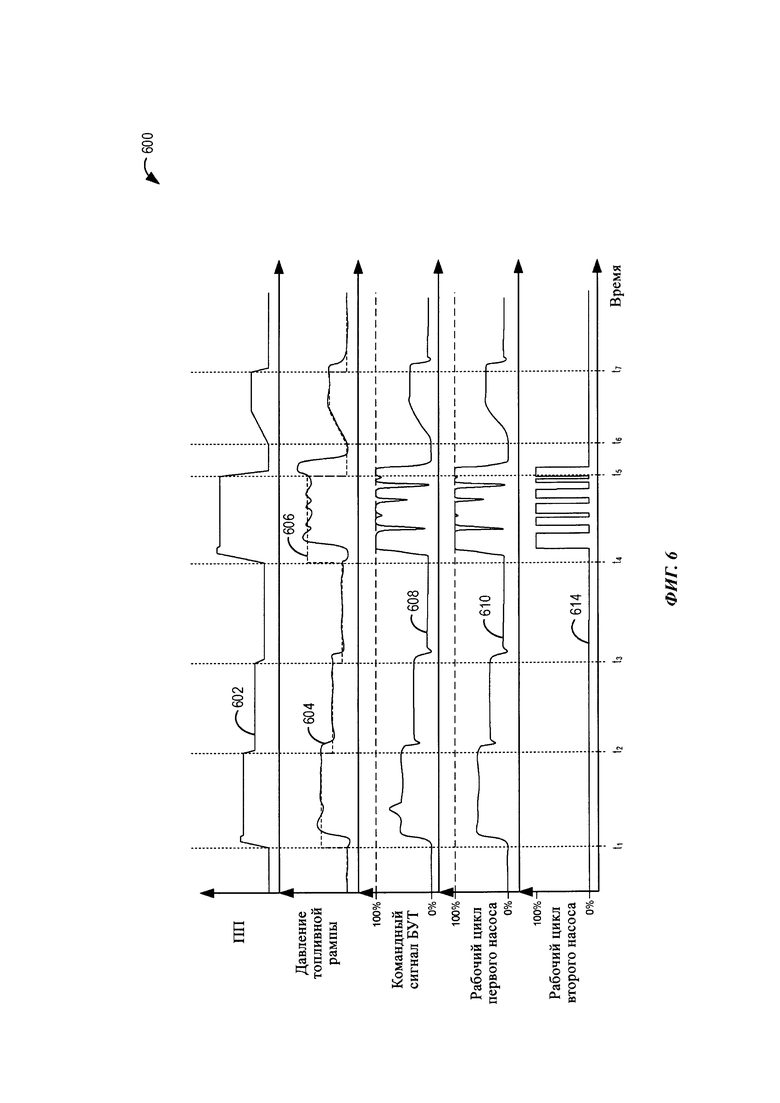
Изобретение может быть использовано в системах топливоподачи двигателей внутреннего сгорания. Представлены способы и системы для обеспечения работы топливной системы, содержащей два подкачивающих насоса. Например, способ может содержать регулирование работы первого подкачивающего насоса для достижения требуемого давления топливной рампы. Способ может содержать включение второго подкачивающего насоса для достижения требуемого давления топливной рампы, когда работы только первого подкачивающего насоса недостаточно для достижения требуемого давления топливной рампы. Изобретение позволяет более точно поддерживать необходимое давление в топливной рампе, упростить систему управления топливоподкачивающими насосами и снизить электропотребление. 3 н. и 15 з.п. ф-лы, 6 ил.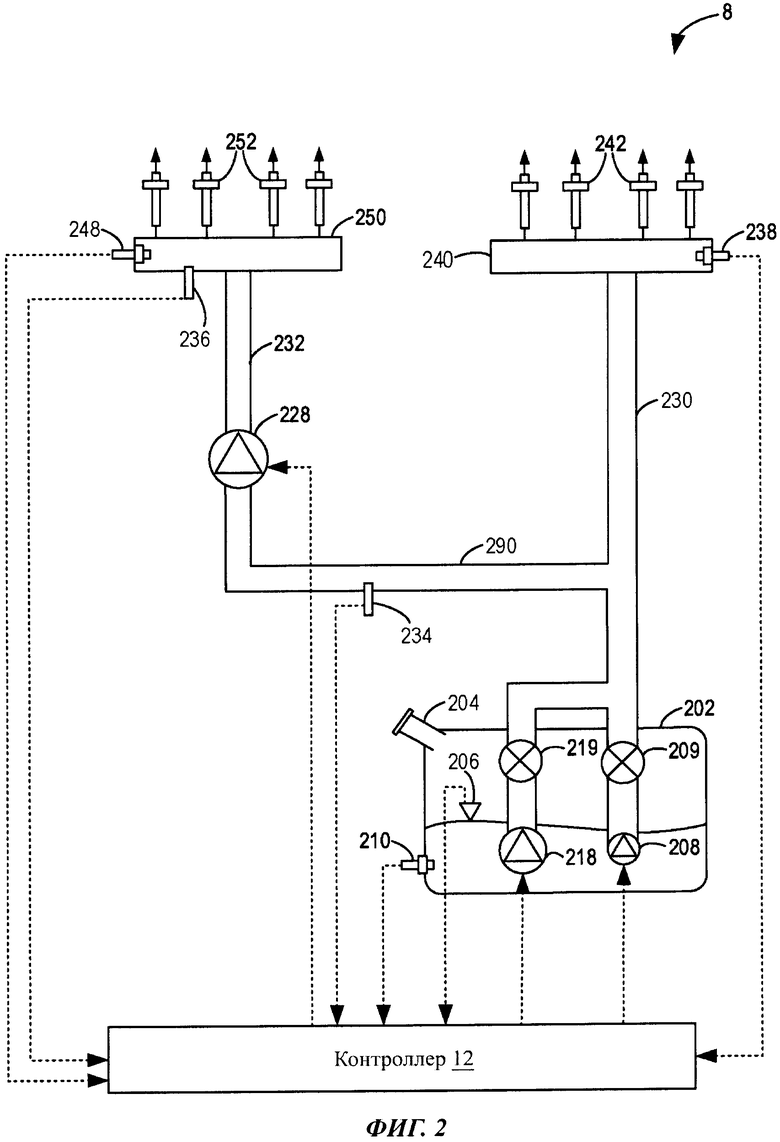
1. Способ управления топливной системой, содержащий шаги, на которых:
регулируют работу первого подкачивающего насоса, в том числе рабочий цикл первого подкачивающего насоса, на основе разности между требуемым давлением топливной рампы и измеренным давлением топливной рампы, причем требуемое давление топливной рампы определяют на основе одного или более из следующего: требуемый водителем крутящий момент, нагрузка двигателя, дополнительная нагрузка, массовый расход воздуха, массовый расход топлива для впрыска и давление наддува; и
в качестве реакции на одно или более из следующего: нажатие педали акселератора, увеличение требуемого давления топливной рампы выше порогового значения давления и увеличение указанной разности на величину, превышающую пороговое значение разности, включают второй подкачивающий насос.
2. Способ по п. 1, отличающийся тем, что работу первого подкачивающего насоса дополнительно регулируют посредством регулирования количества электроэнергии, подаваемой на мотор первого подкачивающего насоса.
3. Способ по п. 2, отличающийся тем, что количество электроэнергии, подаваемой на мотор первого подкачивающего насоса, регулируют посредством монотонного увеличения разности между требуемым давлением топливной рампы и измеренным давлением топливной рампы, когда измеренное давление топливной рампы меньше требуемого давления топливной рампы.
4. Способ по п. 1, дополнительно содержащий шаги, на которых выключают первый подкачивающий насос в качестве реакции на увеличение измеренного давления топливной рампы выше требуемого давления топливной рампы.
5. Способ по п. 1, дополнительно содержащий шаги, на которых выключают второй подкачивающий насос и продолжают подачу электроэнергии только на первый подкачивающий насос в качестве реакции на уменьшение разности между требуемым давлением топливной рампы и измеренным давлением топливной рампы ниже порогового значения разности.
6. Способ по п. 2, отличающийся тем, что второй подкачивающий насос включают посредством увеличения количества электроэнергии, подаваемой на второй подкачивающий насос, до максимального количества электроэнергии.
7. Способ по п. 1, отличающийся тем, что первый подкачивающий насос меньше, чем второй подкачивающий насос, и причем первое максимальное количество электроэнергии для первого подкачивающего насоса меньше, чем второе максимальное количество электроэнергии для второго подкачивающего насоса.
8. Способ управления топливной системой, содержащий шаги, на которых:
генерируют команду для топливного насоса на основе одного или более из следующего: требуемое давление топлива, разность между требуемым давлением топлива и измеренным давлением топлива и количество топлива для впрыска;
определяют первый рабочий цикл для первого подкачивающего насоса на основе команды для топливного насоса;
определяют второй рабочий цикл для второго подкачивающего насоса на основе команды для топливного насоса; и
регулируют работу первого и второго подкачивающих насосов на основе первого и второго рабочих циклов соответственно.
9. Способ по п. 8, отличающийся тем, что давление топлива измеряют на основе показаний одного или нескольких датчиков давления топливной рампы, расположенных внутри топливной рампы.
10. Способ по п. 8, отличающийся тем, что первый рабочий цикл отличается от второго рабочего цикла.
11. Способ по п. 8, отличающийся тем, что требуемое давление топлива определяют на основе одного или более из следующего: требуемый водителем крутящий момент, частота вращения двигателя, впускной массовый поток воздуха, испаряемость топлива и температура топлива.
12. Способ по п. 8, отличающийся тем, что второй рабочий цикл по существу равен нулю процентов, так что не подают электроэнергию на второй подкачивающий насос, когда команда для топливного насоса меньше первого порогового значения, и причем второй рабочий цикл увеличивают от нуля процентов до второго порогового значения, когда команда для топливного насоса больше первого порогового значения.
13. Способ по п. 8, отличающийся тем, что первый рабочий цикл пропорционален команде для топливного насоса.
14. Способ по п. 8, отличающийся тем, что первый рабочий цикл равен по существу нулю процентов, так что не подают электроэнергию на первый подкачивающий насос, когда разность между измеренным давлением топлива и требуемым давлением топлива меньше порогового значения.
15. Топливная система, содержащая:
первый подкачивающий насос;
второй подкачивающий насос;
первый модуль подкачивающего насоса для регулирования первого рабочего цикла первого подкачивающего насоса;
второй модуль подкачивающего насоса для регулирования второго рабочего цикла второго подкачивающего насоса; и
контроллер, электрически связанный с первым и вторым модулями подкачивающих насосов, причем контроллер содержит машиночитаемые инструкции, хранимые в долговременной памяти для:
генерации командного сигнала для подкачивающего насоса на основе одного или более из следующего: разность между требуемым давлением топливной рампы и измеренным давлением топливной рампы, требуемое давление топливной рампы и количество топлива для впрыска; и
передачи командного сигнала для подкачивающего насоса на первый модуль подкачивающего насоса и на второй модуль подкачивающего насоса.
16. Топливная система по п. 15, отличающаяся тем, что выход контроллера электрически соединен с первым и вторым модулями подкачивающих насосов посредством единственного провода и единственного контакта.
17. Топливная система по п. 15, отличающаяся тем, что первый модуль подкачивающего насоса содержит машиночитаемые инструкции, хранимые в долговременной памяти, для регулирования первого рабочего цикла первого подкачивающего насоса на основе командного сигнала для подкачивающего насоса, полученного от контроллера, и причем инструкции содержат: уменьшение первого рабочего цикла до нуля процентов и выключение первого подкачивающего насоса в качестве реакции на уменьшение рабочего цикла командного сигнала для подкачивающего насоса ниже порогового значения и увеличение первого рабочего цикла в диапазоне между 0% и 100% пропорционально увеличению рабочего цикла командного сигнала для подкачивающего насоса выше порогового значения.
18. Топливная система по п. 15, отличающаяся тем, что второй модуль подкачивающего насоса содержит машиночитаемые инструкции, хранимые в долговременной памяти, для регулирования второго рабочего цикла второго подкачивающего насоса на основе командного сигнала для подкачивающего насоса, полученного от контроллера, и причем инструкции содержат: уменьшение второго рабочего цикла до нуля процентов и выключение второго подкачивающего насоса в качестве реакции на уменьшение первого рабочего цикла первого подкачивающего насоса ниже первого порогового значения, и увеличение второго рабочего цикла от нуля процентов до второго порогового значения рабочего цикла, только когда первый рабочий цикл первого подкачивающего насоса больше первого порогового значения, и измеренное давление топливной рампы меньше требуемого давления топливной рампы.
| Способ пластики дефекта при вентральных грыжах по В.Г.Липовану и К.А.Цыбырнэ | 1989 |
|
SU1745211A1 |
| US 20070023014 A1, 01.02.2007 | |||
| US 20110146627 A1, 23.06.2011 | |||
| Способ усиления предельно коротких электрических импульсов с низкой частотой следования, применяемых в ультразвуковой эходефектоскопии | 1961 |
|
SU149934A1 |

