Область техники
Изобретение относится к области автоматизированного управления различными системами, например, такими, как система организации дорожного движения с рабочим элементом в виде сигнального устройства, система водоснабжения с рабочим элементом в виде насосной станции либо система управления механическими процессами с рабочим элементом в виде шагового двигателя, либо любая автоматизированная система, содержащая рабочий элемент.
Уровень техники
Из уровня техники известна система «Умный дом» с интеллектуальным адаптивным входом/выходом (RU 130098 U1, (Общество с ограниченной ответственностью "Браво Моторс"), 10.07.2013), содержащая N групп датчиков, N групп исполнительных устройств и блок управления, состоящий из микропроцессора. При этом система дополнительно содержит генератор профилей оборудования, осуществляющий запросы о существующих профилях оборудования, генерирование и передачу сгенерированных профилей оборудования в локальное и глобальное хранилища профилей оборудования, локальное хранилище профилей оборудования, адаптер оборудования, осуществляющий унификацию параметров оборудования разных стандартов и разных производителей без внесения изменений в саму систему «Умный дом», цифроаналоговый преобразователь, аналого-цифровой преобразователь, глобальное хранилище профилей оборудования, N модулей ввода-вывода, состоящих из блока силовых ключей, усилителя-преобразователя уровня сигнала и коммутатора, а глобальное хранилище профилей оборудования выполнено в виде хранилища на удаленном сервере. При этом в качестве каналов связи могут выступать беспроводные сети стандартов WiFi или ZigBee. Недостаток указанной системы заключается в отсутствии возможности гибко устанавливать связь между процессором, датчиками и исполнительными устройствами.
За прототип принята интеллектуальная гибридная модульная система управления зданием RU 2628289 C1, (Общество с ограниченной ответственностью "ИНСАЙТ Электроникс"), 15.08.2017, которая содержит коммуникационно-управляющий модуль (контроллер) и исполнительные модули, соединенные беспроводной радиочастотной сетью ZigBee, которые осуществляют управление режимами работы автоматизированной системы. При этом коммуникационно-управляющий модуль (контроллер) содержит микроконтроллер (ARM-процессор), приемопередатчик ZigBee (ZigBee-модем), GSM-модем, часы реального времени, преобразователь логических сигналов в уровни сигналов RS-485 (порт RS-485), внутреннюю систему питания. Однако недостаток указанной интеллектуальной системы также заключается в отсутствии возможности гибко устанавливать связь между контроллером и исполнительными модулями.
Из уровня техники известна система мониторинга качества воды CN 101943907 A, (JIANGSU XINGHANG INTELLIGENT CONTROL TECHNOLOGY CO LTD), 12.01.2011, в которой датчики внешних событий соединены с исполнительным модулем радиочастотной сетью ZigBee, основанной на принципе ячеистой топологии. Однако указанная система предназначена для мониторинга качества воды в режиме реального времени и не имеет возможности настройки системы в зависимости от отраслевого назначения автоматизированной системы
Задачей заявленного изобретения является разработка автоматизированной системы беспроводного управления технологическими процессами с улучшенными функциональными возможностями, заключающиеся в улучшении пропускной способности радиочастотной сети ZigBee и упрощении настройки системы и построения сети ZibBee в зависимости от отраслевого назначения автоматизированной системы.
Раскрытие сущности изобретения
Технический результат заявленного изобретения заключается в улучшении функциональных возможностей автоматизированной системы, заключающихся в улучшении пропускной способности радиочастотной сети ZigBee за счет использования сети ZigBee, основанной на принципе ячеистой топологии, позволяющей гибко устанавливать связь между коммуникационно-управляющим модулем и исполнительными модулями, а также в упрощении настройки системы и построения сети ZibBee в зависимости от отраслевого назначения автоматизированной системы, за счет конструктивного выполнения коммуникационно-управляющего и исполнительных модулей.
Технический результат достигается тем, что автоматизированная система беспроводного управления технологическими процессами содержит коммуникационно-управляющий модуль и исполнительные модули, соединенные беспроводной радиочастотной сетью ZigBee, основанной на принципе ячеистой топологии, рабочий элемент и датчик внешних событий. При этом один исполнительный модуль подключён к рабочему элементу, другой - к датчику внешних событий. Коммуникационно-управляющий модуль содержит микроконтроллер с энергонезависимой памятью EEPROM (Electrically Erasable Programmable Read-Only Memory). Микроконтроллер соединен с микросхемой интерфейса универсального асинхронного приёмопередатчика UART (Universal Asynchronous Receiver-Transmiter), которая посредством разъема MiniUSB-B позволяет выполнить настройки микроконтроллера с помощью компьютера. Микроконтроллер соединен с приемопередатчиком ZigBee, выходы которого подключены к внешней антенне. Микроконтроллер соединен с входами выходами GSM/GPRS модема, выходы которого соединены с внешней GSM/GPRS антенной. Микроконтроллер соединен с индикаторами подключения внешнего питания, состояния радиочастотной сети ZigBee и состояния GSM/GPRS сети, выполненных в виде светодиодов, информирующих о состоянии сетей ZigBee, GSM/GPRS и наличия подключения внешней системы питания, путём изменения длительности их импульсных сигналов. Микроконтроллер соединен с микросхемой электронных часов реального времени, которая соединена с дежурным питанием коммуникационно-управляющего модуля, выполненным в виде держателя с литий-ионной батареей. Микроконтроллер соединен с микросхемой преобразователя логических сигналов в уровни сигналов RS-485, входы и выходы которой соединены с портом ввода/вывода RS-485. При этом микроконтроллер, приемопередатчик ZigBee, GSM/GPRS модем, дежурное питание, соединены с внутренней системой питания, выходы которой подключены к внешней системе питания. Каждый исполнительный модуль содержит микроконтроллер, соединенный с микросхемой интерфейса универсального асинхронного приёмопередатчика UART (Universal Asynchronous Receiver-Transmiter), которая посредством разъема MiniUSB-B позволяет выполнить настройки микроконтроллера с помощью компьютера. Микроконтроллер исполнительного модуля соединен с приемопередатчиком ZigBee, выходы которого соединены с внешней антенной ZigBee. Микроконтроллер исполнительного модуля соединен с индикатором внешнего питания и индикатором сети ZigBee, выполненные в виде светодиодов, информирующих о состоянии сетей ZigBee и наличия подключения внешней системы питания, путём изменения длительности их импульсных сигналов. Микроконтроллер исполнительного модуля содержит клеммную колодку для подключения датчика внешних событий, а также содержит четыре выхода с широтно-импульсной модуляцией PWM (Pulse-Width Modulation), соединенные с датчиками тока и датчиками напряжения, которые посредством клеммной колодки соединены с рабочим элементом. Микроконтроллер и приемопередатчик ZigBee соединены с внутренней системой питания, выходы которой, соединены с внешней системой питания.
При этом заявленная автоматизированная система беспроводного управления технологическими процессами выполнена с возможностью управлять системой организации дорожного движения с рабочим элементом в виде сигнального устройства или системой водоснабжением с рабочим элементом в виде насосной станции, или системой управления механическими процессами с рабочим элементом в виде шагового двигателя.
Краткое описание чертежей
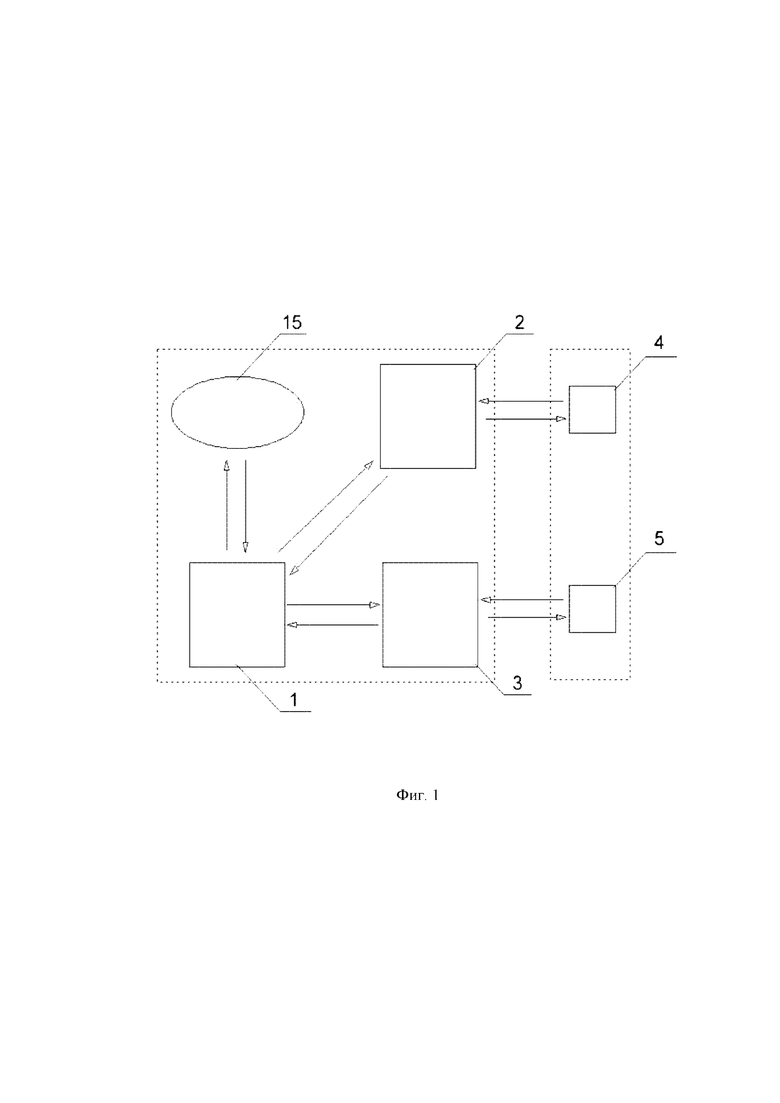
Фиг. 1 - Функциональная схема автоматизированной системы беспроводного управления технологическими процессами.
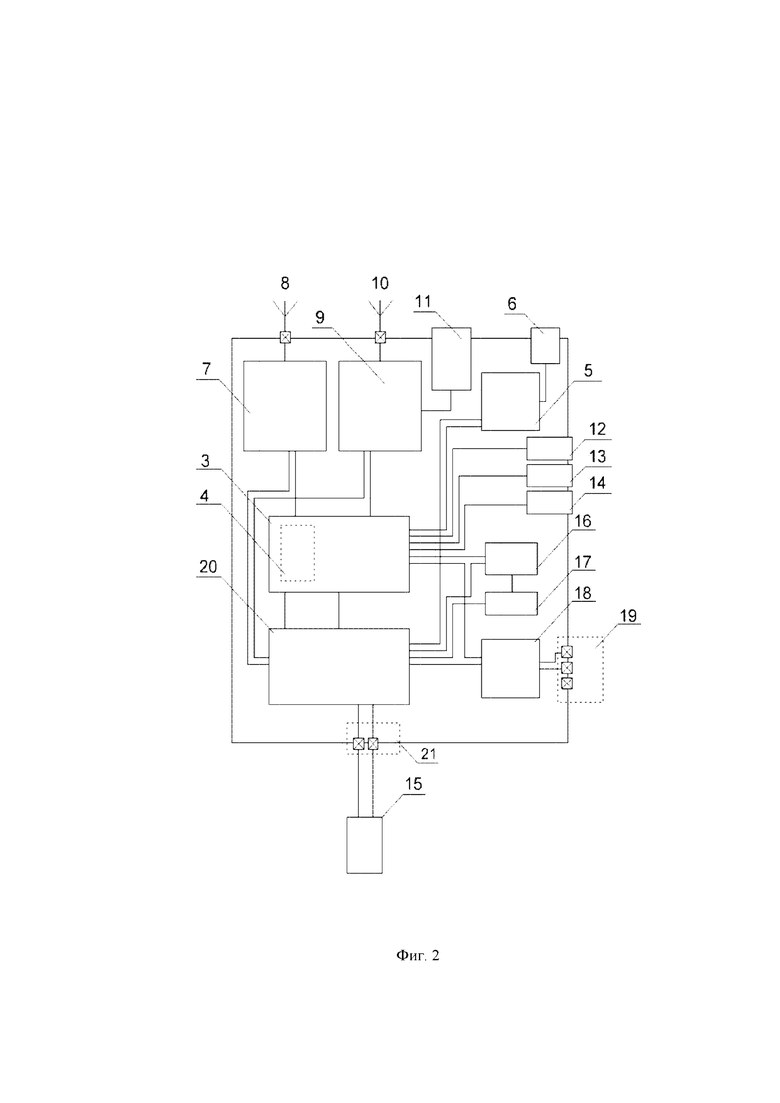
Фиг. 2 - Схема коммуникационно-управляющего модуля.
Фиг. 3 - Схема исполнительного модуля
Осуществление изобретения
На фиг. 1 показана функциональная схема автоматизированной системы беспроводного управления технологическими процессами, на которой к коммуникационно-управляющему модулю 1 по средствам беспроводной сети ZigBee подключены исполнительные модули 2, 3. При этом к одному исполнительному модулю 2 подключен рабочий элемент 4, а к другому исполнительному модулю 3 подклчюен датчик внешних событий 5. Коммуникационно-управляющему модулю 1 подключен к сети интернет 15 для соединения с сервером эксплуатирующего субъекта (на чертеже не показан).
На фиг. 2 показана схема коммуникационно-управляющего модуля 1, являющегося центральным узлом автоматизированной системы беспроводного управления технологическими процессами. Коммуникационно-управляющий модуль 1 содержит микроконтроллер 6, который содержит энергонезависимую память 7 EEPROM (Electrically Erasable Programmable Read-Only Memory), необходимую для хранения служебной информации.
Микроконтроллер 6 соединен с микросхемой интерфейса универсального асинхронного приёмопередатчика 8 UART (Universal Asynchronous Receiver-Transmiter), которая посредством разъема MiniUSB-B 9, с помощью компьютера эксплуатирующего субъекта позволяет выполнить настройку микроконтроллера 6.
Микроконтроллер 6 соединен с приемопередатчиком ZigBee 10, выходы которого посредством разъёма 11 подключены к внешней антенне ZigBee (не обозначена позицией на чертеже).
Микроконтроллер 6 соединен с входами и выходами GSM/GPRS модема 12, выполненного с возможностью работы в глобальной системе мобильной связи GSM (Global System for Mobile Communication) и технологии пакетной передачи данных GPRS (General Packet Radio Service), выходы которого соединены с разъемом 13 для подключения внешней GSM/GPRS антенны (не обозначена позицией на чертеже).
Входы и выходы GSM/GPRS модема 12 соединены с SIM-картой (Subscriber Identification Module) (на чертеже не обозначена) посредством разъема 14 для установки SIM-карт. GSM/GPRS модем 12 предназначен для считывания данных, находящихся в памяти SIM-карт, которые необходимы для аутентификации коммуникационно-управляющего 1 модуля в GSM сети мобильных операторов, предоставляющих услуги сети и доступ к выходу в сеть Интернет 15.
Микроконтроллер 6 соединен с индикатором подключения внешнего питания 16, индикатором состояния радиочастотной сети ZigBee 17 и индикатором состояния GSM/GPRS сети 18, которые выполнены в виде светодиодов, информирующих о состоянии сетей ZigBee 17, GSM/GPRS 18 и наличия подключения внешней системы питания 19, путём изменения длительности их импульсных сигналов. Микроконтроллер 6 соединен с микросхемой электронных часов 20 реального времени RTC (Real Time Clock), которая соединена с дежурным питанием 21 коммуникационно-управляющего модуля 1. Дежурное питание 21 выполнено в виде держателя с литий-ионной батареей (на чертеже не обозначена), которое осуществляет бесперебойное питание микросхемы электронных часов 20, содержащую информацию о реальном суточном времени, при отключении внешней системы питания 19 от коммуникационно-управляющего модуля 1. Микроконтроллер 6 соединен с микросхемой преобразователя логических сигналов 22 в уровни сигналов RS-485, входы и выходы которой соединены с портом ввода/вывода RS-485 23 для подключения дополнительного оборудования в зависимости от отраслевого назначения автоматизированной системы.
Микроконтроллер 6, приемопередатчик ZigBee 10, GSM/GPRS модем 12, дежурное питание 21, соединены с внутренней системой питания 24, выходы которой подключены через клеммную колодку 25 к внешней системе питания 19.
На фиг. 3 показана схема исполнительного модуля 2, 3, который является многофункциональным узлом, с возможностью, как управления режимами работы, рабочего элемента 4 автоматизированной системы, так и обработки сигналов, с датчика внешних событий 5.
Каждый исполнительный модуль 2, 3 имеет одинаковое конструктивное исполнение. Их отличие состоит в идентификаторе в сети ZigBee и их настройке.
Исполнительный модуль 2, 3 содержит микроконтроллер 26, соединенный с микросхемой интерфейса универсального асинхронного приёмопередатчика UART 27 (Universal Asynchronous Receiver-Transmiter), которая посредством разъема MiniUSB-B 9 соединен с компьютером эксплуатирующего субъекта, который позволяет выполнить настройку микроконтроллеров 26.
Микроконтроллер 26 соединен с приемопередатчиком ZigBee 29, выходы которого соединены с внешней антенной ZigBee (не обозначена позицией на чертеже) посредством разъема 30. Микроконтроллер 26 соединен с индикатором внешнего питания 31, индикатором сети ZigBee 32, которые выполнены в виде светодиодов, информирующие о состоянии сети ZigBee, и наличие подключения внешней системы питания 19, путем изменения длительности импульсных сигналов соответствующих индикаторов 31, 32.
Микроконтроллер 26 содержит вход для подключения датчика внешних событий 5 посредством клеммной колодки 35, а также содержит четыре выхода с широтно-импульсной модуляцией PWM (Pulse-Width Modulation), соединенные с датчиками тока 33 и датчиками напряжения 34, которые посредством клеммной колодки 35 соединены с рабочим элементом 4.
Микроконтроллер 26 приемопередатчик ZigBee 29, соединены с внутренней системой питания 36, выходы которой посредством клеммной колодки 35, соединены с внешней системой питания 19.
Автоматизированная система беспроводного управления технологическими процессами работает следующим образом. Включение в работу устройства беспроводного управления автоматизированной системой, выполняет внешняя система питания 19, которая активизирует внутреннюю систему питания 24, коммуникационно-управляющего модуля 1, и внутренние системы питания 36, исполнительных модулей 2, 3, а также датчик внешних событий 5, входящий в состав автоматизированной системы.
Внутренние системы питания 24, 36 активизируют микроконтроллеры 6, 26, соответственно, коммуникационно-управляющего модуля 1 и исполнительных модулей 2, 3, при этом их индикаторы внешнего питания 16, 31 установлены в режим постоянного свечения. Работа микроконтроллеров 6, 26 и построение сети ZigBee осуществляется согласно их настройкам в зависимости от отраслевого назначения автоматизированной системы.
Следующим этапом происходит построение сети ZigBee. Микроконтроллеры 26 исполнительных модулей 2, 3, посредством приемопередатчика ZigBee 29, отправляют широковещательную команду поиска координатора сети. Микроконтроллер 6 коммуникационно-управляющего модуля 1, обрабатывает входящие команды от исполнительных модулей 2, 3 и формирует таблицу устройств вошедших в сеть. После составления таблицы о составе сети ZigBee, микроконтроллер 6 посредством приемопередатчика ZigBee10 отправляет исполнительным модулям 2, 3 команду с информацией обо всех участниках, вошедших в сеть, а также информацию о том, что он является координатором сети ZigBee. После получения сообщений от коммуникационно-управяющего модуля 1, микроконтроллеры 26 исполнительных модулей 2, 3 вносят адрес координатора сети в таблицы маршрутизации данных.
При успешном построении беспроводной радиочастотной сети ZigBee между исполнительными модулями 2, 3 и коммуникационно-управляющим модулем 1 их микроконтроллеры 6, 26 устанавливают режим работы индикаторов состояния радиочастотной сети ZigBee 17, 32, в постоянный режим свечения. При неудачном построении беспроводной радиочастотной сети, индикаторы состояния беспроводной радиочастотной сети ZigBee 17, 32, будут находится в режиме импульсного свечения.
Микроконтроллер 6 коммуникационно-управляющего модуля 1 после построения сети ZigBee, посредством GSM/GPRS модема 12 выполняет подключение к глобальной системе мобильной связи GSM и подключения к сети интернет 15 с помощью технологии пакетной передачи данных GPRS. Микроконтроллер 6 коммуникационно-управляющего модуля 1 выполняет пошаговую процедуру аутентификации GSM/GPRS модема 12 в сети GSM. После того как регистрация в сети GSM/GPRS выполнена, микроконтроллер 6 коммуникационно-управляющего модуля 1 устанавливает режим работы индикатора состояния GSM/GPRS сети 18 в постоянный режим свечения и подключается к серверу эксплуатирующего субъекта (на чертеже не показан) для удаленного управления и мониторинга работы устройства беспроводного управления автоматизированной системы. Адрес сервера эксплуатирующего субъекта установлен при настройке микроконтроллера 6 коммуникационно-управляющего модуля 1.
После подключения коммуникационно-управляющего модуля 1 к серверу эксплуатирующего субъекта, микроконтроллер 6 обрабатывает информацию от исполнительного модуля 2 о работоспособности рабочего элемента 4, и информацию от исполнительного модуля 3 о данных с датчика внешних событий 5, что подтверждает работоспособность исполнительных модулей 2 и 3.
После обработки данных, коммуникационно-управляющий модуль формирует пакет данных для отправки на сервер эксплуатирующего субъекта.
Микроконтроллер 6 коммуникационно-управляющего модуля 1 выполняет обработку данных с сервера, которые позволяют гибко настроить работу системы и вносить изменения в настройку как коммуникационно-управляющего модуля 1, так и исполнительных модулей 2, 3.
После того как пройдены этапы построения сети ZigBee, установлено соединение с сервером эксплуатирующего субъекта, устройство беспроводного управления переходит в режим ожидания внешних сигналов автоматизированной системы. При возникновении внешних событий, приводящих к сбою в работе или к изменению режима работы автоматизированной системы, датчик внешних событий 5, подаёт сигнал на вход исполнительного модуля 3. Микроконтроллер 26 исполнительного модуля, обрабатывает сигнал и посредством приемопередатчика ZigBee 29 выполняет его отправку коммуникационно-управляющему модулю 1. Микроконтроллер 6 после получения и обработки сигнала о внешнем событии, отправляет управляющие команды исполнительному модулю 2, для изменения режима работы рабочего элемента 4.
Помимо сигнала датчика внешних событий 5, приводящего в работу устройство управления автоматизированной системой, также возможен запуск ее работы по расписанию согласно настройке микроконтроллера 26 коммуникационно-управляющего модуля 1. В зависимости от конкретизации назначения автоматизированной системы, определены длительность и режимы работы рабочего элемента 4.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для организации дорожного движения | 2019 |
|
RU2688426C1 |
| Система организации нерегулируемого пешеходного перехода | 2019 |
|
RU2709296C1 |
| Система дублирования светофорных сигналов на регулируемом пешеходном переходе | 2019 |
|
RU2699460C1 |
| Система для организации дорожного движения | 2019 |
|
RU2713271C1 |
| СПОСОБ КОНТРОЛЯ ПРОИЗВОДСТВЕННОГО ПРОЦЕССА | 2020 |
|
RU2745002C1 |
| Устройство организации дорожного движения | 2019 |
|
RU2736848C1 |
| Светодиодный дорожный знак | 2023 |
|
RU2821612C1 |
| Маячок системы организации дорожного движения (ОДД) и система ОДД. | 2019 |
|
RU2723414C1 |
| Беспроводной контроллер датчиков | 2018 |
|
RU2701103C1 |
| Система оплаты проезда в общественном транспорте и бортовой компьютер водителя, использующийся в этой системе | 2020 |
|
RU2738621C1 |

Изобретение относится к системам автоматизированного управления. Автоматизированная система беспроводного управления технологическими процессами содержит коммуникационно-управляющий модуль и исполнительные модули, соединенные беспроводной радиочастотной сетью ZigBee, рабочий элемент и датчик внешних событий. Один исполнительный модуль подключён к рабочему элементу, другой к датчику внешних событий. Коммуникационно-управляющий модуль содержит микроконтроллер с энергонезависимой памятью. Микроконтроллер соединен с микросхемой интерфейса универсального асинхронного приёмопередатчика, с приемопередатчиком ZigBee, с входами/выходами GSM/GPRS модема, с индикаторами подключения внешнего питания, состояния радиочастотной сети ZigBee и состояния GSM/GPRS сети, с микросхемой электронных часов реального времени, с микросхемой преобразователя логических сигналов в уровни сигналов RS-485. Каждый исполнительный модуль содержит микроконтроллер, соединенный с микросхемой интерфейса универсального асинхронного приёмопередатчика. Микроконтроллер исполнительного модуля соединен с приемопередатчиком ZigBee, с индикатором внешнего питания и индикатором сети ZigBee и содержит клеммную колодку для подключения датчика внешних событий, а также выходы с широтно-импульсной модуляцией, соединенные с датчиками. Достигается повышение пропускной способности автоматизированной системы управления. 9 з.п. ф-лы, 3 ил.
1. Автоматизированная система беспроводного управления технологическими процессами, содержащая коммуникационно-управляющий модуль и исполнительные модули, соединенные беспроводной радиочастотной сетью ZigBee, основанной на принципе ячеистой топологии, рабочий элемент и датчик внешних событий, при этом один исполнительный модуль подключён к рабочему элементу, другой – к датчику внешних событий,
коммуникационно-управляющий модуль содержит микроконтроллер с энергонезависимой памятью, микроконтроллер соединен с микросхемой интерфейса универсального асинхронного приёмопередатчика, которая посредством разъема позволяет выполнить настройки микроконтроллера с помощью компьютера, микроконтроллер соединен с приемопередатчиком ZigBee, выходы которого подключены к внешней антенне, с входами/выходами GSM/GPRS модема, выходы которого соединены с внешней GSM/GPRS антенной, с индикаторами подключения внешнего питания, состояния радиочастотной сети ZigBee и состояния GSM/GPRS сети, с микросхемой электронных часов реального времени, которая соединена с дежурным питанием коммуникационно-управляющего модуля, с микросхемой преобразователя логических сигналов в уровни сигналов RS-485, входы и выходы которой соединены с портом ввода/вывода RS-485, при этом микроконтроллер, приемопередатчик ZigBee, GSM/GPRS модем, дежурное питание соединены с внутренней системой питания, выходы которой подключены к внешней системе питания,
каждый исполнительный модуль содержит микроконтроллер, соединенный с микросхемой интерфейса универсального асинхронного приёмопередатчика, которая посредством разъема позволяет выполнить настройки микроконтроллера с помощью компьютера, микроконтроллер исполнительного модуля соединен с приемопередатчиком ZigBee, выходы которого соединены с внешней антенной ZigBee, с индикатором внешнего питания и индикатором сети ZigBee, микроконтроллер исполнительного модуля содержит клеммную колодку для подключения датчика внешних событий, а также содержит выходы с широтно-импульсной модуляцией, соединенные с датчиками, которые посредством клеммной колодки соединены с рабочим элементом, микроконтроллер исполнительного модуля и приемопередатчик ZigBee соединены с внутренней системой питания, выходы которой соединены с внешней системой питания.
2. Автоматизированная система беспроводного управления технологическими процессами по п. 1, в которой энергонезависимая память микроконтроллера коммуникационно-управляющего модуля выполнена в виде EEPROM (ElectricallyErasableProgrammableRead-OnlyMemory).
3. Автоматизированная система беспроводного управления технологическими процессами по пп. 1, 2, в которой разъем интерфейсов универсального асинхронного приёмопередатчика коммуникационно-управляющего и исполнительных модулей выполнен в виде разъема MiniUSB-B.
4. Автоматизированная система беспроводного управления технологическими процессами по пп. 1, 2, в которой индикаторы подключения внешнего питания, состояния радиочастотной сети ZigBee и состояния GSM/GPRS сети коммуникационно-управляющего модуля и индикаторы внешнего питания и сети ZigBee исполнительных модулей выполнены в виде светодиодов, информирующих о состоянии сетей ZigBee, GSM/GPRS и наличии подключения внешней системы питания путём изменения длительности их импульсных сигналов.
5. Автоматизированная система беспроводного управления технологическими процессами по п. 1, в которой датчики, соединенные с выходами микроконтроллера исполнительного модуля с широтно-импульсной модуляцией, являются датчиками тока и напряжения.
6. Автоматизированная система беспроводного управления технологическими процессами по любому из пп. 1, 5, в которой количество выходов микроконтроллера исполнительного модуля с широтно-импульсной модуляцией равняется четырем.
7. Автоматизированная система беспроводного управления технологическими процессами по п. 1, в которой дежурное питание выполнено в виде держателя с литий-ионной батареей.
8. Автоматизированная система беспроводного управления технологическими процессами по п. 1, в которой GSM/GPRS модем посредством разъема соединен с SIM-картой.
9. Автоматизированная система беспроводного управления технологическими процессами по п. 1, в которой посредством GSM/GPRS модема микроконтроллер коммуникационно-управляющего модуля подключается к серверу для удаленного управления и мониторинга работы системы, при этом адрес сервера установлен при настройке микроконтроллера коммуникационно-управляющего модуля.
10. Автоматизированная система беспроводного управления технологическими процессами по пп. 1-9, в которой технологические процессы заключаются в организации дорожного движения с рабочим элементом в виде сигнального устройства, или в управлении водоснабжением с рабочим элементом в виде насосной станции, или в управлении механическими процессами с рабочим элементом в виде шагового двигателя.
| RU 264564 C1, 26.03.2018 | |||
| Токарный резец | 1924 |
|
SU2016A1 |
| 0 |
|
SU178497A1 | |

