ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее раскрытие относится к области техники инструментов для микроскопирования инструментов, и, в частности, к устройству формирования микроскопических изображений с помощью зеркала, и системе и способу для калибровки положения микроиглы.
УРОВЕНЬ ТЕХНИКИ
[0002] Инвертационный микроскоп является важным инструментом, используемым в биологических лабораториях и функциях как обязательный инструмент в области микроскопии. Среди способов для мужского фактора бесплодия технология интрацитоплазматической инъекции сперматозоида (ICSI) широко используется в мире как предпочтительный способ оплодотворения. В традиционном способе ICSI процесс ICSI выполняется посредством ручного управления устройством микроманипуляции. Способ для отбора сперматозоидов и выполнения роботизированной технологии ICSI на незрелой яйцеклетке оператором предложен авторами Лу и др. (seen. IEEE Trans Biomed Eng.2011Jul; 58(7):2102-8.doi:10.1109/TBME.2011. 2146781.Epub 2011Apr 25. LU et al.). Полностью автоматическая система ICSI описана в патенте, озаглавленном "AUTOMATED INTRACYTOPLASMIC SPERM INJECTION ASSISTED FERTILIZATION SYSTEM" ("АВТОМАТИЗИРОВАННАЯ СИСТЕМА ОПЛОДОТВОРЕНИЯ С ПОМОЩЬЮ ИНТРАЦИТОПЛАЗМАТИЧЕСКОЙ ИНЪЕКЦИИ СПЕРМАТОЗОИДА" (Заявка № CN201380021578.9). Вследствие сложности технологии ICSI все еще существует много проблем, которые должны быть решены в роботизированной технологии ICSI и автоматической системе ICSI, и, таким образом, технология ICSI не может быть применена в медицинской практике. Традиционный способ ICSI все еще является единственным способом в медицинской практике вследствие относительной надежности.
[0003] В традиционном способе ICSI инвертационный микроскоп, микроинъекционная система и система микроманипуляции формируют устройство микроманипуляции. Со ссылкой на фиг. 1, инвертационный микроскоп включает в себя базовые функциональные компоненты, такие как источник 11 света, предметный столик 12 и линза 13 окуляра. Микроинъекционная система включает в себя базовые функциональные компоненты, такие как микроигла 14, держатель 15 иглы, регулятор 16 угла горизонтальной плоскости держателя иглы и регулятор 17 угла фронтальной плоскости держателя иглы. Система микроманипуляции включает в себя базовые функциональные компоненты, такие как регулятор 18 стереопозиции держателя иглы. Микроигла 14 имеет специальную структуру и включает в себя тонкий основной корпус и функциональный участок 141. Между функциональным участком и основным корпусом сформирован угол. Фиг. 1 показывает соотношение между микроиглой и соответствующими устройствами после сборки в традиционном способе ICSI.
[0004] В целях иллюстрации охваченные направления определены следующим образом. Предполагается, что предметный столик 12 имеет квадратную форму и имеет четыре стороны, в том числе левый край 121, правый край 122, передний край 123 и задний край 124, как показано на фиг. 1. Определено, что ось X базовой системы координат параллельна переднему краю 123 или заднему краю 124 предметного столика 12, ось Y базовой системы координат параллельна левому краю 121 или правому краю 122 предметного столика 12, и ось Z базовой системы координат перпендикулярна предметному столику 12. Ось X и ось Y формируют горизонтальную плоскость, ось X и ось Z формируют фронтальную плоскость, и ось Y и ось Z формируют сагиттальную плоскость. Вид, параллельный оси Y от близкого конца к дальнему концу, определен как вид сборку, и вид, параллельный оси Z сверху вниз, определен как вид сверху.
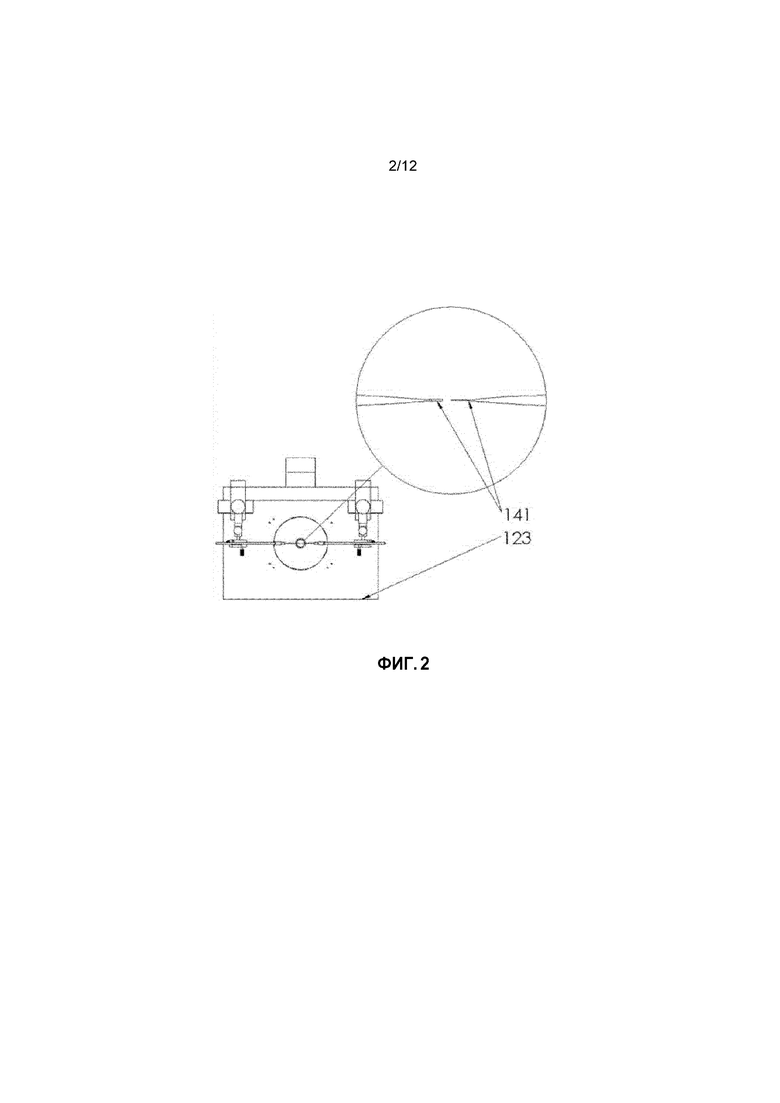
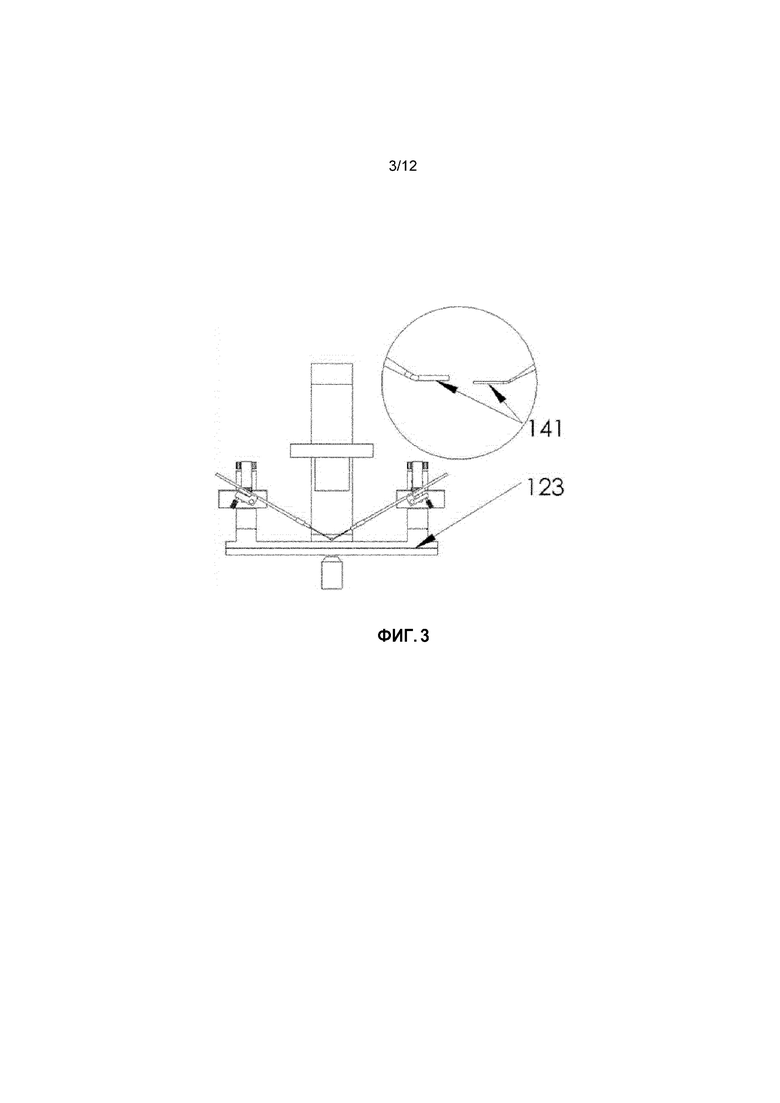
[0005] Требования по установке для микроиглы 14 являются очень строгими. Идеальное положение микроиглы 14 имеет первый признак и второй признак. В первом признаке центральный фрагмент функционального участка 141 микроиглы 14 параллелен фронтальной плоскости на виде сверху, как показано на фиг. 2. Во втором признаке нижний край функционального участка 141 микроиглы 14 параллелен горизонтальной плоскости на виде сбоку, как показано на фиг. 3.
[0006] Вид сверху является традиционным видом микроскопа, в котором непосредственно наблюдается, является ли центральный фрагмент функционального участка 141 микроиглы 14 параллельным фронтальной плоскости. На практике микроскопическое изображение на виде сбоку, показанное на фигуре 3, не может наблюдаться вследствие ограничений существующей оптической технологии микроскопа. В этом случае не может быть определено, находится ли положение микроиглы 14 после сборки в идеальном положении, описанном во втором признаке.
[0007] Строгие требования для эффекта установки для микроиглы 14 востребованы идеальным результатом микроманипуляции. Большой угол между центральным фрагментом функционального участка 141 микроиглы 14 и фронтальной плоскостью или большой угол между нижним краем функционального участка 141 микроиглы 14 и горизонтальной плоскостью приводит к большому повреждению объекта микроманипуляции, т.е., яйцеклетки. Кроме того, процесс микроманипуляции является трудным, что приводит к плохому результату микроманипуляции. Чтобы достигнуть идеального положения микроиглы, оператор наблюдает через линзу окуляра на виде сверху и регулирует компоненты, такие как регулятор 16 угла горизонтальной плоскости держателя иглы, регулятор 17 угла фронтальной плоскости держателя иглы и регулятор 18 стереопозиции держателя иглы. Таким образом, первый признак, т.е., положение, показанное на фиг. 2, может быть достигнуто. Однако поскольку нельзя наблюдать микроскопическое изображение функционального участка 141 микроиглы 14 на виде сбоку, угол между нижним краем функционального участка 141 микроиглы 14 и горизонтальной плоскостью не может быть определен.
[0008] Функциональные участки 141 разных микроигл 14 имеют разную толщину. Например, внешние диаметры функциональных участков удерживающей пипетки, инъекционной иглы и иглы для биопсии, которые обычно используются, соответственно равны 120 мкм, 10 мкм и 40 мкм. Функциональные участки 141 разных микроигл 14 имеют разные длины, например, в пределах от 300 мкм до 1000 мкм. Кроме того, функциональные участки 141 различных микроигл 14 имеют разные углы, и это вызвано тем, что угол между основным корпусом и функциональным участком 141 микроиглы 14 получается посредством искусственного обжига. Углы микроигл разных типов или разных микроигл одного и того же типа отличаются. Кроме того, расстояние между функциональным участком 141 микроиглы 14 после сборки и поверхностью предметного столика 12 является коротким, что составляет приблизительно 500 мкм. В этом случае очень трудно определить невооруженным глазом, является ли горизонтальным функциональный участок 141 установленной микроиглы 14. Также трудно скомпоновать устройство камеры с суперкоротким расстоянием, чтобы наблюдать функциональный участок микроиглы на виде сбоку.
[0009] В настоящее время угол между нижним краем функционального участка 141 микроиглы 14 и горизонтальной плоскостью определяется оператором полностью в соответствии с опытом. Имеются большие субъективные разности между микроиглами 14 различных типов, собранными одним и тем же оператором, и по-прежнему имеются большие субъективные разности между разными микроиглами 14 одинакового типа, собранными одним и тем же оператором в разное время. Важность и технический статус сборки микроиглы 14 подробно описаны на страницах 332-334 монографии, названной "Practical Manual of In Vitro Fertilization" ("Практическое руководство по экстракорпоральному оплодотворению"), которые не описаны в настоящем документе.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0010] Ввиду этого обеспечены система и способ для автоматической калибровки положения микроиглы в соответствии с вариантами осуществления настоящего раскрытия, в результате чего микроигла может быть собрана с очень большой точностью.
[0011] В аспекте настоящего раскрытия обеспечено устройство формирования микроскопических изображений с помощью зеркала. Устройство формирования микроскопических изображений с помощью зеркала включает в себя привод движения, опору формирователя зеркального изображения и формирователь зеркального изображения. Привод движения фиксированно установлен на предметном столике микроскопа. Один конец опоры формирователя зеркального изображения соединен с приводом движения. Формирователь зеркального изображения включает в себя плоское зеркало, установленное на другом конце опоры формирователя зеркального изображения. Угол, сформированный между зеркальной поверхностью плоского зеркала и горизонтальной плоскостью предметного столика микроскопа, равен 45°, и угол, сформированный между зеркальной поверхностью плоского зеркала и фронтальной плоскостью предметного столика микроскопа, равен 45°.
[0012] В некоторых вариантах осуществления плоское зеркало формирователя зеркального изображения имеет прямоугольную форму.
[0013] В некоторых вариантах осуществления опора формирователя зеркального изображения является твердой физической структурой, соединяющей формирователь зеркального изображения и привод движения.
[0014] В некоторых вариантах осуществления привод движения выполнен с возможностью управлять автоматически с использованием ведущего элемента или вручную перемещением опоры формирователя зеркального изображения из первоначальной позиции в предопределенную позицию, чтобы сформировать зеркальное изображение.
[0015] В некоторых вариантах осуществления привод движения является структурой смещения, имеющей линейную направляющую планку и ползунок. Линейная направляющая планка параллельна сагиттальной плоскости предметного столика микроскопа. Опора формирователя зеркального изображения перпендикулярна линейной направляющей планке.
[0016] В некоторых вариантах осуществления привод движения является структурой смещения, имеющей центральный шарнир. Центральный шарнир соединен с механической рукой формирователя зеркального изображения, чтобы служить в качестве опоры формирователя зеркального изображения. Привод движения выполнен с возможностью управлять автоматически с использованием ведущего элемента или вручную поворотом опоры формирователя зеркального изображения от первоначального угла до предопределенного угла, чтобы сформировать зеркальное изображение.
[0017] В некоторых вариантах осуществления привод движения включает в себя возвращающий элемент. Возвращающий элемент выполнен с возможностью управлять возвратом опоры формирователя зеркального изображения из предопределенной позиции в первоначальную позицию.
[0018] В некоторых вариантах осуществления устройство формирования микроскопических изображений с помощью зеркала дополнительно включает в себя источник света, размещенный на стороне плоского зеркала, где расположена зеркальная поверхность плоского зеркала. Источник света используется для увеличения интенсивности света на виде сбоку.
[0019] В аспекте настоящего раскрытия обеспечена система для калибровки положения микроиглы. Система включает в себя описанное выше устройство формирования микроскопических изображений с помощью зеркала, систему инвертационного микроскопа, систему микроманипуляции, вращательный ведущий элемент держателя иглы, угловой ведущий элемент во фронтальной плоскости, угловой ведущий элемент в сагиттальной плоскости и центральный процессор, в котором интегрировано программное обеспечение для обработки. Система инвертационного микроскопа включает в себя блок захвата видеоизображения и блок автоматической или ручной фокусировки. Система микроманипуляции включает в себя держатель иглы, фиксатор держателя иглы и ведущий элемент для приведения держателя иглы в движение вперед, назад, влево, вправо, вверх и вниз. Вращательный ведущий элемент держателя иглы механически соединен с держателем иглы. Угловой ведущий элемент во фронтальной плоскости механически соединен с фиксатором держателя иглы. Угловой ведущий элемент в сагиттальной плоскости механически соединен с фиксатором держателя иглы. Программное обеспечение для обработки исполняется, чтобы заставить центральный процессор: автоматически отслеживать и управлять позиционированием формирователя зеркального изображения; управлять блоком автоматической фокусировки для выполнения автоматической фокусировки; управлять блоком захвата видеоизображения для выполнения захвата изображения и анализа; и управлять работой вращательного ведущего элемента держателя иглы, углового ведущего элемента во фронтальной плоскости, углового ведущего элемента в сагиттальной плоскости и ведущего элемента для приведения держателя иглы в движение вперед, назад, влево, вправо, вверх и вниз.
[0020] В аспекте настоящего раскрытия обеспечен способ калибровки, применяемый к описанной выше системе для автоматической калибровки положения микроиглы. Способ калибровки включает в себя:
S1: ручную сборку левой микроиглы и правой микроиглы на держателях игл, соответственно;
S2: ручное закрепление держателей игл на фиксаторах держателей игл, соответственно;
S3: для каждой микроиглы ручную доводку функционального участка микроиглы до центрального поля зрения линзы окуляра;
S4: запуск режима автоматической калибровки;
S5: формирование видеоизображения функционального участка микроиглы в горизонтальной плоскости посредством использования блока автоматической фокусировки и ведущего элемент для приведения держателя иглы в движение вперед, назад, влево, вправо, вверх и вниз;
S6: захват видеоизображения в горизонтальной плоскости посредством блока захвата видеоизображения;
S7: анализ угла α между проекцией на горизонтальную плоскость функционального участка микроиглы на видеоизображении в горизонтальной плоскости и фронтальной плоскостью посредством исполнения программного обеспечения для обработки и запуск вращательного ведущего элемента держателя иглы и углового ведущего элемента в сагиттальной плоскости для калибровки функционального участка микроиглы в горизонтальной плоскости посредством калибровки угла α, чтобы он был равен нулю;
S8: позиционирование формирователя зеркального изображения в предопределенной позиции, чтобы сформировать зеркальное изображение;
S9: формирование видеоизображения функционального участка микроиглы во фронтальной плоскости посредством использования блока автоматической фокусировки и ведущего элемент для приведения держателя иглы в движение вперед, назад, влево, вправо, вверх и вниз;
S10: захват видеоизображения во фронтальной плоскости блоком захвата видеоизображения;
S11: анализ угол α' между проекцией на фронтальную плоскость функционального участка микроиглы на видеоизображении во фронтальной плоскости и горизонтальной плоскостью посредством исполнения программного обеспечения для обработки и запуск углового ведущего элемента во фронтальной плоскости для калибровки функционального участка микроиглы во фронтальной плоскости посредством калибровки угла α', чтобы он был равен нулю; и
S12: возвращение формирователя зеркального изображения в первоначальную позицию и перевод системы микроманипуляции в состояние, готовое к операции ICSI.
[0021] В некоторых вариантах осуществления в режиме автоматической калибровки на этапе S4 положение левой микроиглы автоматически калибруется до или после того, как положение правой микроиглы автоматически откалибровано, или положение левой микроиглы автоматически калибруется вместе с положением правой микроиглы.
[0022] В некоторых вариантах осуществления на этапе S8 расстояние между предопределенной позицией и функциональным участком микроиглы составляют 0,5 мм.
[0023] По сравнению с традиционной технологией положение функционального участка микроиглы может быть откалибровано до идеального положения с помощью простой структуры и решений в соответствии с вариантами осуществления настоящего раскрытия. Таким образом, нижний край функционального участка микроиглы может быть параллелен горизонтальной плоскости.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0024] Чтобы более ясно проиллюстрировать технические решения в вариантах осуществления настоящего раскрытия или в традиционной технологии, ниже кратко описаны чертежи, которые будут использоваться в описании вариантов осуществления или традиционной технологии. Очевидно, что чертежи в последующем описании показывают только некоторые варианты осуществления настоящего раскрытия, и другие чертежи могут быть получены специалистами в области техники на основе приведенных чертежей без каких-либо творческих усилий.
[0025] Фиг. 1 - структурная схема, показывающая соотношение между микроиглой и соответствующими устройствами после сборки в традиционном способе ICSI;
[0026] Фиг. 2 - схема, показывающая первое идеальное положение микроиглы, в котором центральный фрагмент функционального участка микроиглы параллелен фронтальной плоскости на виде сверху;
[0027] Фиг. 3 - схема, показывающая второе идеальное положение микроиглы, в котором нижний край функционального участка микроиглы параллелен горизонтальной плоскости на виде сбоку;
[0028] Фиг. 4 - схема, показывающая базовый принцип обработки изображений традиционного оптического микроскопа;
[0029] Фиг. 5 - структурная схема, показывающая систему для калибровки положения микроиглы в соответствии с вариантом осуществления настоящего раскрытия;
[0030] Фиг. 6 - структурная схема, показывающая устройство формирования микроскопических изображений с помощью зеркала в соответствии с вариантом осуществления настоящего раскрытия;
[0031] Фиг. 7 - схема, показывающая принцип формирования микроскопического изображения с помощью зеркала устройства формирования микроскопических изображений с помощью зеркала в соответствии с вариантом осуществления настоящего раскрытия;
[0032] Фиг. 8 - схема, показывающая эффект формирования микроскопических изображений с помощью зеркала функционального участка микроиглы устройства формирования микроскопических изображений с помощью зеркала в соответствии с вариантом осуществления настоящего раскрытия, причем микроскопическое изображение части микроиглы, отраженное формирователем зеркального изображения на виде сбоку, наблюдается через линзу окуляра;
[0033] Фиг. 9 показывает микроскопическое изображение функционального участка микроиглы, наблюдаемое на виде сверху, перед тем как система для калибровки положения микроиглы в соответствии с вариантом осуществления настоящего раскрытия выполняет калибровку;
[0034] Фиг. 10 показывает микроскопическое изображение функционального участка микроиглы, наблюдаемое на виде сверху, после того как системы для калибровки положения микроиглы в соответствии с, вариантом осуществления настоящего раскрытия выполняет калибровку;
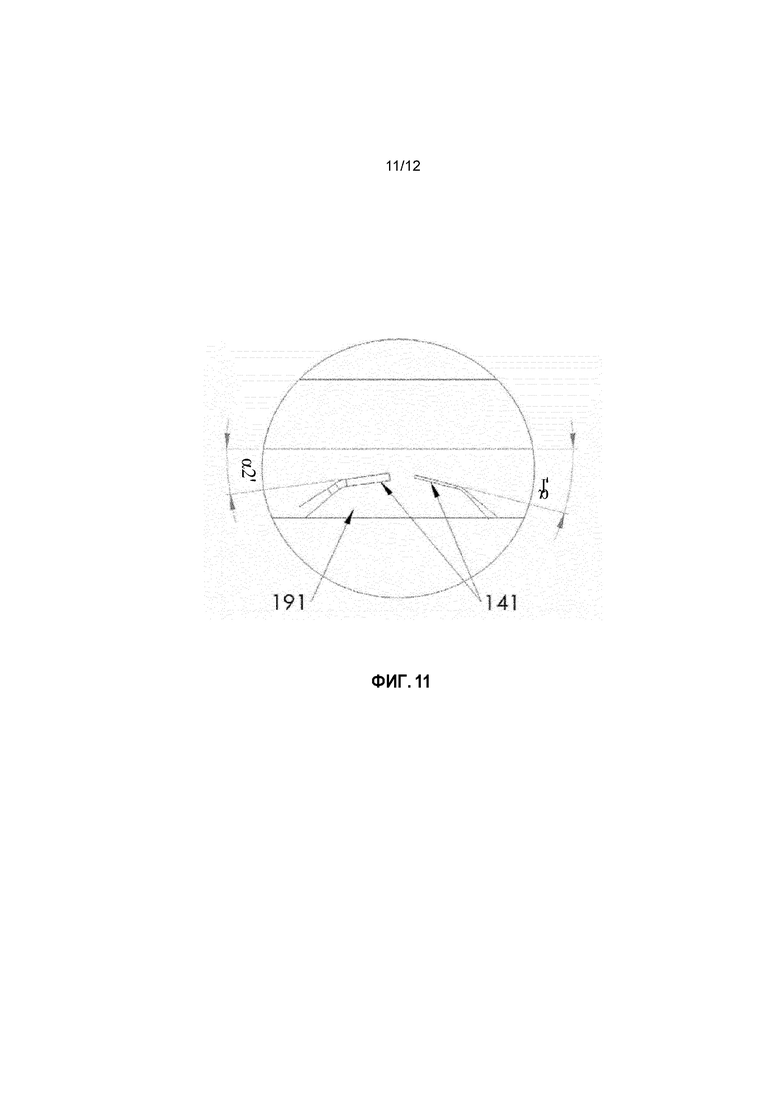
[0035] Фиг. 11 показывает микроскопическое зеркальное изображение функционального участка микроиглы, наблюдаемое через линзу окуляра на виде сбоку, перед тем как система для калибровки положения микроиглы в соответствии с вариантом осуществления настоящего раскрытия выполняет калибровку; и
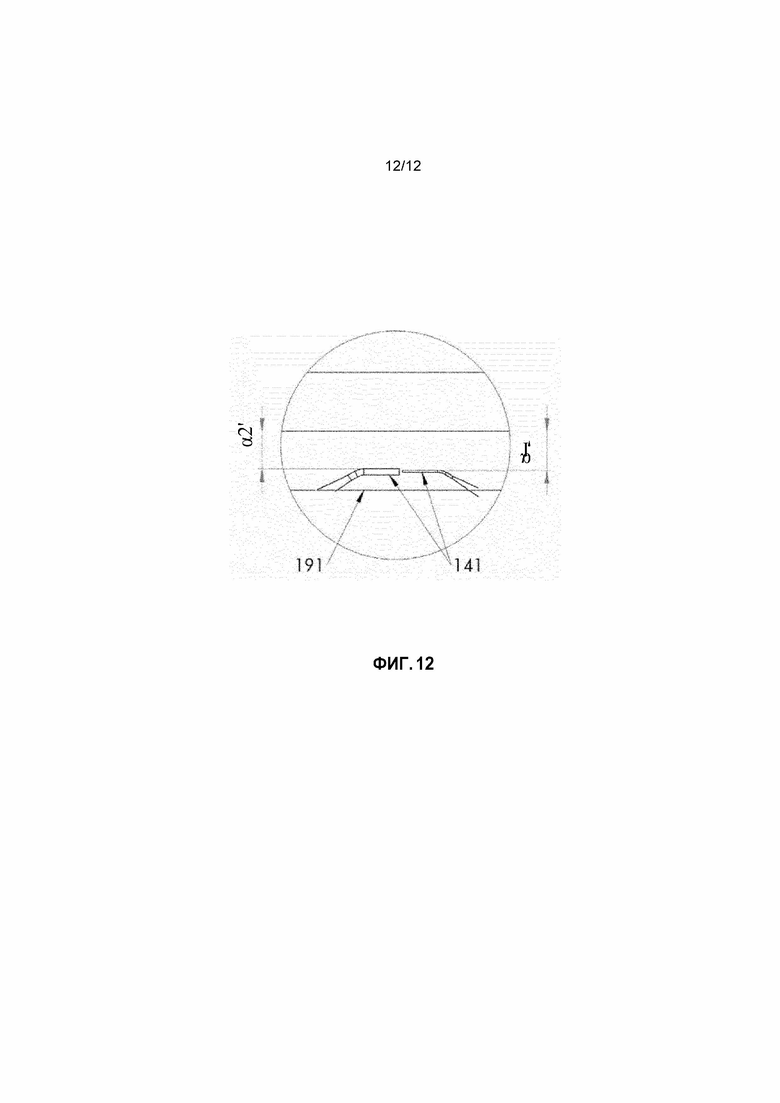
[0036] Фиг. 12 показывает микроскопическое зеркальное изображение функционального участка микроиглы, наблюдаемое через линзу окуляра на виде сбоку, после того как система для калибровки положения микроиглы в соответствии с вариантом осуществления настоящего раскрытия выполняет калибровку.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0037] Предпочтительные варианты осуществления настоящего раскрытия описаны подробно ниже со ссылкой на чертежи, чтобы преимущества и признаки настоящего раскрытия были лучше понятны специалистам в области техники, и чтобы более ясно определить объем защиты настоящего раскрытия.
[0038] Процесс калибровки положения микроиглы представляет собой процесс, в котором положение функционального участка микроиглы калибруется до идеального состояния и на виде сверху, и на виде сбоку. Как описано в разделе "Уровень техники", в настоящее время не может быть получено микроскопическое изображение функционального участка микроиглы на виде сбоку. Таким образом, чтобы достигнуть автоматической калибровки положения микроиглы, техническая проблема, которая будет теперь решена, состоит в том, как получить микроскопическое изображение функционального участка 141 микроиглы на виде сбоку в реальном времени.
[0039] Базовый принцип обработки изображений традиционного оптического микроскопа описан следующим образом. Свет, излучаемый от источника 11 света, проходит через функциональный участок 141 прозрачной микроиглы и непосредственно входит в оптическую систему формирования изображений, включающую в себя линзу 13 объектива, как показано на фиг. 4. В этом случае видом изображения является вид сверху в направлении оси Z, которое параллельно направлению передачи света. Вид изображения является единственным, то есть, сформированное изображение наблюдается только на виде сверху.
[0040] На основе определений трех ортогональных осей (ось X, ось Y и ось Z) базовой системы координат и трех ортогональных опорных плоскостей (горизонтальная плоскость, фронтальная плоскость и сагиттальная плоскость), описанных в разделе "Уровень техники", линия пересечения между горизонтальной плоскостью и фронтальной плоскостью предметного столика микроскопа являются осью X, линия пересечения между горизонтальной плоскостью и сагиттальной плоскостью предметного столика микроскопа является осью Y, и линия пересечения между сагиттальной плоскостью и фронтальной плоскостью предметного столика микроскопа является осью Z.
[0041] Чтобы получить микроскопическое изображение функционального участка 141 микроиглы на виде сбоку, устройство 19 формирования микроскопических изображений с помощью зеркала обеспечено в соответствии с вариантом осуществления настоящего раскрытия. Как показано на фиг. 5 и 6, устройство 19 формирования микроскопических изображений с помощью зеркала включает в себя формирователь 191 зеркального изображения, опору 192 формирователя зеркального изображения и привод 193 движения. Привод 193 движения устойчиво установлен на предметном столике микроскопа. Один конец опоры 192 формирователя зеркального изображения соединен с приводом 193 движения. Формирователь 191 зеркального изображения установлен на другом конце опоры 192 формирователя зеркального изображения. Угол, сформированный между зеркальной поверхностью плоского зеркала формирователя 191 зеркального изображения и горизонтальной плоскостью предметного столика микроскопа, равен 45°, и угол, сформированный между зеркальной поверхностью плоского зеркала и фронтальной плоскостью предметного столика микроскопа, равен 45°. Факультативно привод движения устойчиво установлен на предметном столике микроскопа в направлении оси Y, и опора формирователя зеркального изображения размещена в направлении оси X.
[0042] Плоское зеркало служит в качестве структуры формирования зеркального изображения формирователя 191 зеркального изображения и используется для захвата зеркального изображения наблюдаемого объекта в конкретном виде. Формирователь 191 зеркального изображения может быть сделан из такого материала, как стекло и металл, посредством обработки плоского зеркала. Предпочтительно плоское зеркало имеет прямоугольную форму.
[0043] Опора 192 формирователя зеркального изображения является предпочтительно твердой физической структурой, соединяющей формирователь 191 зеркального изображения и привод 193 движения.
[0044] Привод 193 движения может быть выполнен с возможностью управлять перемещением опоры 192 формирователя зеркального изображения из первоначальной позиции в предопределенную позицию для формирования зеркального изображения автоматически с использованием ведущего элемента или вручную. Например, привод 193 движения является структурой смещения, имеющей линейную направляющую планку и ползунок. Линейная направляющая планка параллельна сагиттальной плоскости предметного столика микроскопа. Опора формирователя зеркального изображения перпендикулярна линейной направляющей планке. В другом примере привод 193 движения является структурой смещения, имеющей центральный шарнир. Центральный шарнир соединен с механической рукой формирователя зеркального изображения, чтобы служить в качестве опоры формирователя зеркального изображения. Центральный шарнир выполнен с возможностью управлять поворотом опоры формирователя зеркального изображения от первоначального угла до предопределенного угла для формирования зеркального изображения автоматически с использованием ведущего элемента или вручную.
[0045] Объект может быть точно перемещен из первоначальной позиции в предопределенную позицию с помощью привода 193 движения. Кроме того, возвращающий элемент может использоваться для управления опорой формирователя зеркального изображения для возврата из предопределенной позиции в первоначальную позицию.
[0046] Факультативно привод движения может приводиться в действие посредством ведущего элемента. В этом случае привод движения может иметь функцию автоматического управления.
[0047] Устройство формирования микроскопических изображений с помощью зеркала в соответствии с вариантом осуществления настоящего раскрытия может дополнительно включать в себя источник 194 света, размещенный на стороне плоского зеркала формирователя 191 зеркального изображения. Источник 194 света используется для увеличения интенсивности света на виде сбоку. Таким образом, яркость зеркального изображения наблюдаемого объекта, сформированного в формирователе зеркального изображения, может быть эффективно увеличена.
[0048] Принцип устройства формирования микроскопических изображений с помощью зеркала описан следующим образом. В соответствии с характеристиками обработки изображений плоского зеркала свет пропускается к плоскому зеркалу после прохождения через объект (функциональный участок 141 микроиглы в варианте осуществления настоящего раскрытия) на конкретном виде (вид сбоку в варианте осуществления настоящего раскрытия), и свет отражается в оптическую систему формирования изображений, включающую в себя линзу объектива. Таким образом, получается микроскопическое изображение объекта. Изображение является микроскопическим изображением зеркального изображения объекта, сформированного на плоском зеркале на конкретном виде. Как показано на фиг. 7, угол, сформированный между плоским зеркалом MN и плоскостью предметного столика (т.е., горизонтальной плоскостью) OS равен 45°, и угол, сформированный между плоским зеркалом MN и фронтальной плоскостью, равен 45°. Падающий свет A, проходящий через прозрачный объект S, падает на плоское зеркало MN в точке O падения и с углом падения θ, и затем отражается на основе нормальной линии N' с углом отражения θr, чтобы сформировать отраженный свет B. Отраженный свет входит в линзу объектива. В этом случае получается микроскопическое увеличенное изображение зеркального изображения S'.
[0049] Опора 192 формирователя зеркального изображения и привод 193 движения, соединенный с опорой 192 формирователя зеркального изображения, используются в качестве компонентов для изменения позиции и возвращения формирователя 191 зеркального изображения. В этом случае дорожка позиционирования/возвращения формирователя 191 зеркального изображения ограничена приводом 193 движения и параллельна оси Y предметного столика микроскопа.
[0050] Фиг. 8 показывает эффект формирования микроскопических изображений с помощью зеркала. Микроскопическое изображение части микроиглы, отраженное формирователем зеркального изображения на виде сбоку, может наблюдаться через линзу окуляра, а микроскопическое изображение части микроиглы, не отраженное формирователем зеркального изображения на виде сбоку, не может наблюдаться через линзу окуляра. Вследствие характеристик обработки изображений плоского зеркала изображение, наблюдаемое через линзу окуляра, инвертировано и зеркально-симметрично в отношении фактического функционального участка микроиглы. На основе микроскопического зеркального изображения на фиг. 8 указано, что нижний край функционального участка 141 микроиглы не находится в горизонтальном положении.
[0051] В настоящем раскрытии посредством добавления устройства формирования микроскопических изображений с помощью зеркала к существующему инвертационному микроскопу могут быть получено микроскопическое увеличенное изображение функционального участка 41 микроиглы на виде сбоку, и, таким образом, можно определить, находится ли функциональный участок микроиглы в горизонтальном положении, и тем самым функциональный участок микроиглы может быть соответствующим образом отрегулирован.
[0052] На основе описанного выше устройства формирования микроскопических изображений с помощью зеркала далее обеспечена система для калибровки положения микроиглы в соответствии с вариантом осуществления настоящего раскрытия. Система включает в себя устройство 19 формирования микроскопических изображений с помощью зеркала в соответствии с упомянутым выше вариантом осуществления, систему инвертационного микроскопа, систему микроманипуляции, вращательный ведущий элемент 28 держателя иглы, угловой ведущий элемент 27 во фронтальной плоскости, угловой ведущий элемент 26 в горизонтальной плоскости и центральный процессор, в котором интегрировано программное обеспечение обработки. Система инвертационного микроскопа включает в себя блок захвата видеоизображения и блок 21 ручной или автоматической фокусировки. Система микроманипуляции включает в себя держатель 23 иглы, фиксатор 24 держателя иглы и ведущий элемент 25 для приведения держателя иглы в движение вперед, назад, влево, вправо, вверх и вниз. Вращательный ведущий элемент держателя иглы механически соединен с держателем иглы. Угловой ведущий элемент во фронтальной плоскости механически соединен с фиксатором держателя иглы, чтобы заменить регулятор 17 угла фронтальной плоскости держателя иглы. Угловой ведущий элемент в горизонтальной плоскости механически соединен с фиксатором держателя иглы, чтобы заменить регулятор 16 угла горизонтальной плоскости держателя иглы. Программное обеспечение для обработки исполняется, чтобы заставить центральный процессор: автоматически отслеживать и управлять позиционированием формирователя зеркального изображения; управлять блоком автоматической фокусировки для выполнения автоматической фокусировки; управлять блоком захвата видеоизображения для выполнения захвата изображения и анализа; и управлять работой вращательного ведущего элемента держателя иглы, углового ведущего элемента во фронтальной плоскости, углового ведущего элемента в сагиттальной плоскости и ведущего элемента для приведения держателя иглы в движение вперед, назад, влево, вправо, вверх и вниз.
[0053] Фиг. 9 показывает микроскопическое изображение, наблюдаемое на виде сверху перед калибровкой. Угол между проекцией на горизонтальную плоскость функционального участка микроиглы и фронтальной плоскостью не равен нулю. Таким образом, угол между проекцией на горизонтальную плоскость функционального участка микроиглы и осью X не равен нулю, т.е., α1≠0, и α2≠0.
[0054] Фиг. 11 показывает микроскопическое зеркальное изображение, наблюдаемое на виде сбоку перед калибровкой. Угол между проекцией на фронтальную плоскость нижнего края функционального участка микроиглы и горизонтальной плоскостью не равен нолю. Таким образом, угол между проекцией на фронтальную плоскость нижнего края функционального участка микроиглы и осью X не равен нулю, т.е., α1'≠0, и α2'≠0.
[0055] Способ калибровки, к которому относится система для калибровки положения микроиглы, включает в себя следующие этапы S1-S12.
[0056] На этапе S1 левая микроигла и правая микроигла вручную собираются на держателях игл, соответственно.
[0057] На этапе S2 держатели игл вручную закрепляются на фиксаторах держателей игл, соответственно.
[0058] На этапе S3 для каждой микроиглы функциональный участок микроиглы вручную доводится до центрального поля зрения линзы окуляра.
[0059] На этапе S4 запускается режим автоматической калибровки.
[0060] На этапе S5 видеоизображение функционального участка микроиглы в горизонтальной плоскости формируется посредством использования блока автоматической фокусировки и ведущего элемента для приведения держателя иглы в движение вперед, назад, влево, вправо, вверх и вниз.
[0061] На этапе S6 видеоизображение в горизонтальной плоскости захватывается блоком захвата видеоизображения.
[0062] На этапе S7 анализируется угол между проекцией на горизонтальную плоскость функционального участка микроиглы в видеоизображении в горизонтальной плоскости и фронтальной плоскостью, т.е., угол α между проекцией на горизонтальную плоскость функционального участка микроиглы и осью X посредством исполнения программного обеспечения для обработки. Затем вращательный ведущий элемент держателя иглы и угловой ведущий элемент в сагиттальной плоскости запускаются для калибровки угла α, чтобы он был равен нулю, чтобы откалибровать функциональный участок микроиглы во фронтальной плоскости.
[0063] На этапе S8 формирователь зеркального изображения помещается в предопределенную позицию, чтобы сформировать зеркальное изображение.
[0064] На этапе S9 видеоизображение функционального участка микроиглы во фронтальной плоскости формируется посредством использования блока автоматической фокусировки и ведущего элемент для приведения держателя иглы в движение вперед, назад, влево, вправо, вверх и вниз.
[0065] На этапе S10 видеоизображение во фронтальной плоскости захватывается блоком захвата видеоизображения.
[0066] На этапе S11 анализируется угол между проекцией на фронтальную плоскость функционального участка микроиглы в видеоизображении во фронтальной плоскости и горизонтальной плоскостью, т.е., угол α' между проекцией на фронтальную плоскость функционального участка микроиглы и осью X посредством исполнения программного обеспечения для обработки. Затем угловой ведущий элемент во фронтальной плоскости запускается для калибровки угла α', чтобы он был равен нулю, чтобы откалибровать функциональный участок микроиглы в горизонтальной плоскости.
[0067] На этапе S12 формирователь зеркального изображения возвращается в первоначальную позицию, и систему микроманипуляции переводят в состояние, готовое к операции ICSI.
[0068] В режиме автоматической калибровки на этапе S4 положение левой микроиглы автоматически калибруется до или после того, как положение правой микроиглы автоматически откалибровано, или положение левой микроиглы автоматически калибруется вместе с положением правой микроиглы.
[0069] На этапе S8 расстояние между предопределенной позицией и функциональным участком микроиглы может составлять 0,5 мм.
[0070] Фиг. 10 показывает микроскопическое изображение функционального участка микроиглы, наблюдаемое на виде сверху после того, как положение микроиглы откалибровано посредством упомянутой выше регулировки. Угол между проекцией на горизонтальную плоскость центрального фрагмента функционального участка микроиглы и фронтальной плоскостью равен нулю. Таким образом, угол между проекцией на горизонтальную плоскость центрального фрагмента функционального участка микроиглы и осью X равен нулю, т.е., α1=0, и α2=0.
[0071] Фиг. 12 показывает микроскопическое зеркальное изображение функционального участка микроиглы, наблюдаемое через линзу окуляра на виде сбоку после того, как положение микроиглы откалибровано. Угол между проекцией фронтальную плоскость нижнего края функционального участка микроиглы и горизонтальной плоскостью равен нулю. Таким образом, угол между проекцией на фронтальную плоскость нижнего края функционального участка микроиглы и осью X равен нулю, т.е., α1'=0, и α2'=0.
[0072] Положение функционального участка микроиглы может быть откалибровано до идеального положения с помощью простой структуры и решений, предоставленных в настоящем раскрытии. Таким образом, нижний край функционального участка микроиглы может быть параллелен горизонтальной плоскости.
[0073] Хотя варианты осуществления настоящего раскрытия описаны со ссылкой на чертежи, различные модификации и изменения могут быть сделаны без отступления от объема защиты приложенной формулы изобретения. Модификации и изменения находятся в пределах объема настоящего раскрытия.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для наблюдения изображений | 1987 |
|
SU1734067A1 |
| МИКРОМАНИПУЛЯТОР | 1933 |
|
SU38800A1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ (ВАРИАНТЫ) И РАСТРОВЫЙ ЭЛЕКТРОННЫЙ МИКРОСКОП | 2009 |
|
RU2415380C1 |
| СПОСОБ ДИАГНОСТИКИ ВОЗБУДИТЕЛЕЙ ИНФЕКЦИОННЫХ И ПАРАЗИТАРНЫХ БОЛЕЗНЕЙ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2123682C1 |
| МИКРОМАНИПУЛЯТОР | 1933 |
|
SU38799A1 |
| Устройство и способ для прецизионного переноса слоев атомарно тонких материалов любой площади на планарные подложки | 2019 |
|
RU2742761C1 |
| Устройство для одновременного микроскопического и термического анализа металлов и их сплавов | 1933 |
|
SU42729A1 |
| УСТРОЙСТВО ДЛЯ МИКРОСКОПИЧЕСКИХ ИССЛЕДОВАНИЙ ПРИ ЗАМОРАЖИВАНИИ БИООБЪЕКТОВ | 1993 |
|
RU2084893C1 |
| МИКРОСКОП ДЛЯ РАБОТЫ В ПРОХОДЯЩЕМ И (ИЛИ) ОТРАЖЕННОМ СВЕТЕ | 1986 |
|
RU2037854C1 |
| ИЗОБРАЖАЮЩИЙ МИКРОЭЛЛИПСОМЕТР | 2010 |
|
RU2503922C2 |








Изобретение относится к области техники инструментов для микроскопирования инструментов, в частности к устройству формирования микроскопических изображений с помощью зеркала, и системе и способу для калибровки положения микроиглы. Устройство формирования микроскопических изображений с помощью зеркала содержит: привод (193) движения, фиксированно установленный на предметном столике микроскопа; опору (192) устройства формирования зеркального изображения, один конец которого соединен с приводом движения; и устройство (191) формирования зеркального изображения, имеющее плоское зеркало, которое имеет прилежащий угол 45° между плоскостью зеркала и горизонтальной плоскостью предметного столика микроскопа и между плоскостью зеркала и фронтальной плоскостью и которое установлено на другом конце опоры устройства формирования зеркального изображения. Изобретение позволяет произвести калибровку до требуемого состояния, т.е. до отношения позиции, в которой нижний край функционального компонента микроиглы параллелен горизонтальной плоскости. 3 н. и 10 з.п. ф-лы, 12 ил.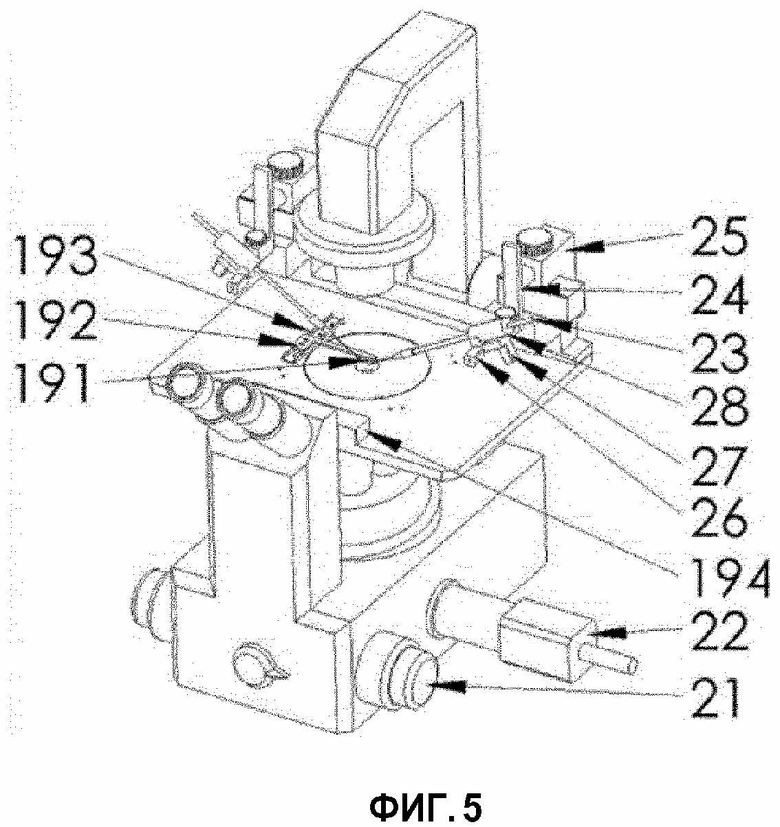
1. Устройство формирования микроскопических изображений с помощью зеркала, содержащее:
привод движения, фиксированно установленный на предметном столике микроскопа;
опору формирователя зеркального изображения, причем один конец опоры формирователя зеркального изображения соединен с приводом движения; и
формирователь зеркального изображения, содержащий плоское зеркало, установленное на другом конце опоры формирователя зеркального изображения, причем угол, сформированный между зеркальной поверхностью плоского зеркала и горизонтальной плоскостью предметного столика микроскопа, равен 45° и угол, сформированный между зеркальной поверхностью плоского зеркала и фронтальной плоскостью предметного столика микроскопа, равен 45°.
2. Устройство формирования микроскопических изображений с помощью зеркала по п. 1, в котором плоское зеркало формирователя зеркального изображения имеет прямоугольную форму.
3. Устройство формирования микроскопических изображений с помощью зеркала по п. 1, в котором опора формирователя зеркального изображения является твердой физической структурой, соединяющей формирователь зеркального изображения и привод движения.
4. Устройство формирования микроскопических изображений с помощью зеркала по п. 1, в котором привод движения выполнен с возможностью управлять автоматически с использованием ведущего элемента или вручную перемещением опоры формирователя зеркального изображения из первоначальной позиции в предопределенную позицию, чтобы сформировать зеркальное изображение.
5. Устройство формирования микроскопических изображений с помощью зеркала по п. 4, в котором привод движения является структурой смещения, имеющей линейную направляющую планку и ползунок, причем
линейная направляющая планка параллельна сагиттальной плоскости предметного столика микроскопа; и
опора формирователя зеркального изображения перпендикулярна линейной направляющей планке.
6. Устройство формирования микроскопических изображений с помощью зеркала по п. 4, в котором привод движения является структурой смещения, имеющей центральный шарнир, причем
центральный шарнир соединен с механической рукой формирователя зеркального изображения, чтобы служить в качестве опоры формирователя зеркального изображения; и
привод движения выполнен с возможностью управлять автоматически с использованием ведущего элемента или вручную поворотом опоры формирователя зеркального изображения от первоначального угла до предопределенного угла, чтобы сформировать зеркальное изображение.
7. Устройство формирования микроскопических изображений с помощью зеркала по п. 4, в котором привод движения содержит:
возвращающий элемент, выполненный с возможностью управлять возвратом опоры формирователя зеркального изображения из предопределенной позиции в первоначальную позицию.
8. Устройство формирования микроскопических изображений с помощью зеркала по п. 1, дополнительно содержащее:
источник света, размещенный на стороне плоского зеркала, где расположена зеркальная поверхность плоского зеркала, причем источник света используется для увеличения интенсивности света на виде сбоку.
9. Устройство формирования микроскопических изображений с помощью зеркала по п. 1, в котором привод движения фиксированно установлен на предметном столике микроскопа в направлении оси Y и опора формирователя зеркального изображения размещена в направлении оси X.
10. Система для калибровки положения микроиглы, причем система содержит:
устройство формирования микроскопических изображений с помощью зеркала по любому из пп. 1-9;
систему инвертационного микроскопа, содержащую: блок захвата видеоизображения и блок ручной или автоматической фокусировки;
систему микроманипуляции, содержащую: держатель иглы, фиксатор держателя иглы и ведущий элемент для приведения держателя иглы в движение вперед, назад, влево, вправо, вверх и вниз;
вращательный ведущий элемент держателя иглы, механически соединенный с держателем иглы;
угловой ведущий элемент во фронтальной плоскости, механически соединенный с фиксатором держателя иглы;
угловой ведущий элемент в сагиттальной плоскости, механически соединенный с фиксатором держателя иглы; и
центральный процессор, в который интегрировано программное обеспечение для обработки, причем программное обеспечение для обработки исполняется, чтобы заставить центральный процессор:
автоматически отслеживать и управлять позицией формирователя зеркального изображения;
управлять блоком автоматической фокусировки для выполнения автоматической фокусировки;
управлять блоком захвата видеоизображения для выполнения захвата изображения и анализа; и
управлять работой вращательного ведущего элемента держателя иглы, углового ведущего элемента во фронтальной плоскости, углового ведущего элемента в сагиттальной плоскости и ведущего элемента для приведения держателя иглы в движение вперед, назад, влево, вправо, вверх и вниз.
11. Способ калибровки, применяемый к системе для калибровки положения микроиглы по п. 10, причем способ калибровки содержит этапы, на которых:
S1: вручную собирают левую микроиглу и правую микроиглу на держателях игл соответственно;
S2: вручную закрепляют держатели игл на фиксаторах держателей игл соответственно;
S3: для каждой микроиглы вручную доводят функциональный участок микроиглы до центрального поля зрения линзы окуляра;
S4: запускают режим автоматической калибровки;
S5: формируют видеоизображение функционального участка микроиглы в горизонтальной плоскости посредством использования блока автоматической фокусировки и ведущего элемента для приведения держателя иглы в движение вперед, назад, влево, вправо, вверх и вниз;
S6: захватывают видеоизображение в горизонтальной плоскости посредством блока захвата видеоизображения;
S7: анализируют угол α между проекцией на горизонтальную плоскость функционального участка микроиглы на видеоизображении в горизонтальной плоскости и фронтальной плоскостью посредством исполнения программного обеспечения для обработки и запускают вращательный ведущий элемент держателя иглы и угловой ведущий элемент в сагиттальной плоскости для калибровки функционального участка микроиглы в горизонтальной плоскости посредством калибровки угла α, чтобы он был равен нулю;
S8: позиционируют формирователь зеркального изображения в предопределенной позиции, чтобы сформировать зеркальное изображение;
S9: формируют видеоизображение функционального участка микроиглы во фронтальной плоскости посредством использования блока автоматической фокусировки и ведущего элемента для приведения держателя иглы в движение вперед, назад, влево, вправо, вверх и вниз;
S10: захватывают видеоизображение во фронтальной плоскости блоком захвата видеоизображения;
S11: анализируют угол α' между проекцией на фронтальную плоскость функционального участка микроиглы на видеоизображении во фронтальной плоскости и горизонтальной плоскостью посредством исполнения программного обеспечения для обработки и запускают угловой ведущий элемент во фронтальной плоскости для калибровки функционального участка микроиглы во фронтальной плоскости посредством калибровки угла α', чтобы он был равен нулю; и
S12: возвращают формирователь зеркального изображения в первоначальную позицию и переводят систему микроманипуляции в состояние, готовое к операции ICSI.
12. Способ калибровки по п. 11, в котором в режиме автоматической калибровки на этапе S4,
положение левой микроиглы автоматически калибруется до или после того, как положение правой микроиглы автоматически откалибровано, или
положение левой микроиглы автоматически калибровано вместе с положением правой микроиглы.
13. Способ калибровки по п. 11, в котором на этапе S8 расстояние между предопределенной позицией и функциональным участком микроиглы составляет 0,5 мм.
| US 2014118820 A1, 01.05.2014 | |||
| US 20150360236 A1, 17.12.2015 | |||
| WO 2009005368 A1, 08.01.2009. |

