Для исследования под микроскопом, как то: микро-операций над живой клеткой, изолирования одной клеточки (например бактерии) и т.п. в научных лабораториях (при разрешении теоретических вопросов) и в крупных лечебных учреждениях (для производства бактериологических анализов) служат приборы, называемые микроманипуляторами (конструкции Петерфи, Чемберса, Тэйлора и др.). Однако, существующие ныне системы микроманипуляторов страдают большими недостатками, в силу чего их применение весьма ограничено.
Недостатки существующих систем микроманипуляторов заключаются, главным образом, в следующем: 1) большое количество винтов для каждой руки чрезвычайно затрудняет все движения. Многие задания оказывается исполнить сложнее, чем научиться писать левой рукой человеку, до этого всегда писавшему правой; 2) некоторые, подчас необходимые, движения микроманипулятор совсем неспособен выполнить; 3) инструмент дорого стоит и 4) вследствие тонкости механизма починка затруднена.
Предлагаемый прибор, по мнению автора, удачно справляется с указанными недостатками известных уже микроманипуляторов, так как: 1) вместо большого числа винтов для каждой руки, которыми приходится пользоваться во время микроманипуляций, имеется только один винт, причем для производства операций не требуется предварительных навыков; 2) прибор в состоянии выполнить, как показали опыты автора, все практически необходимые движения; 3) устройство прибора достаточно просто и 4) починка его не представляет особого труда для среднего слесаря.
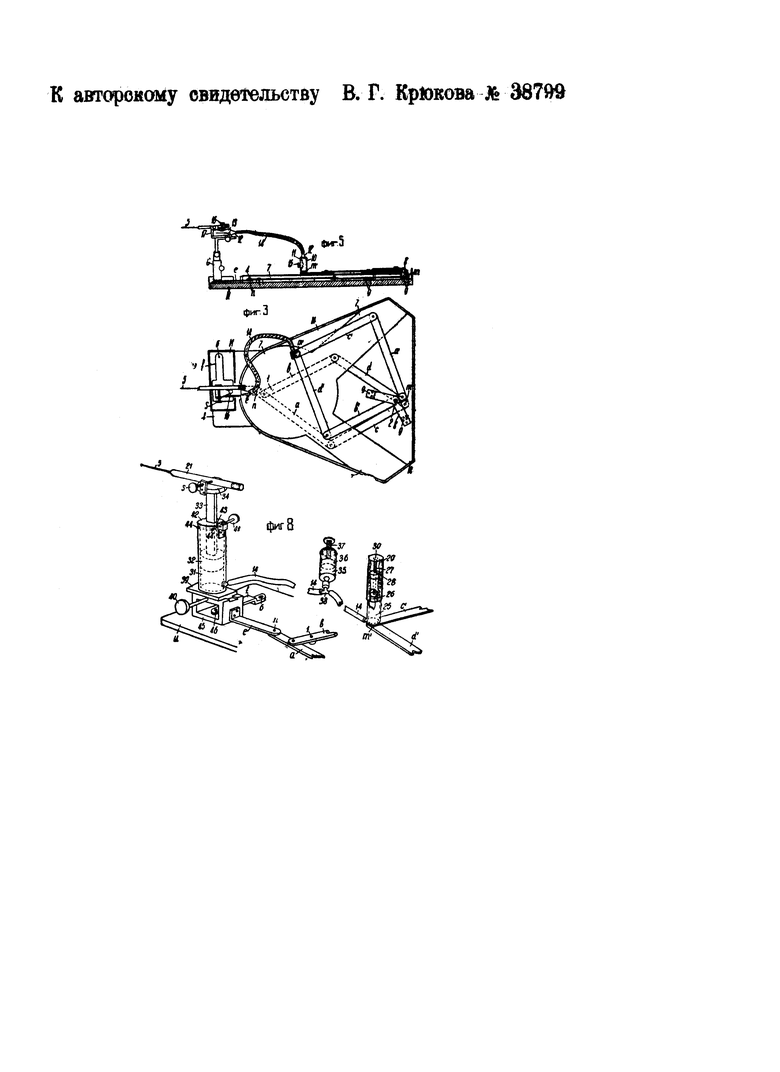
На чертеже фиг. 1 изображен пантографный механизм, состоящей из шарнирно соединенных ромбов; фиг. 2 - общий вид части прибора; фиг. 3 - вид сверху прибора для одной руки фиг. 4 - деталь соединения ромбов; фиг. 5 - приспособление для вертикального перемещения микроиглы; фиг. 6 - штатив (масштаб взят крупнее); фиг. 7 - общий вид двух частей прибора, устроенных совершенно одинаково для двух рук, и фиг. 8 - видоизмененное устройство микроманипулятора.
Предлагаемый прибор состоит из двух одинаковых частей А и В (фиг. 7), предназначенных для работы правой В и левой А рукой.
Рычаги и стерженьки а, b, с и d пантографного механизма соединены между собой шарнирами, образуя ромб abcd, сторона b которого устроена поворотной на оси 1, укрепленной на основании прибора (металлическая доска, обозначенная буквой U на фиг. 4) таким образом, что вся система может поворачиваться вокруг оси 1 в горизонтальной плоскости. В точке m первый ромб сочленен (шарнирно) со вторым ромбом, составленным из стерженьков и рычагов, а′ b′ с′ и d′, устроенным так же, как и первый ромб. Помощью оси 2 второй ромб также поворотно укреплен на основной металлической доске. Таким образом, на основной доске укреплены только стороны b и b′ ромба, на осях 1 и 2, во всех же остальных точках рычаги соединяются лишь между собой. Если двигать в горизонтальной плоскости точку m′, то точка n будет копировать все движения, но в уменьшенном виде в отношении, равном произведению полученному от умножения отношения длин плеч рыча а b на отношение длин плеч рычага b′. Например, если это отношение в первом ромбе равно 10 и во втором ромбе также равно 10, то точка m второго ромба уменьшит движения 10 раз, а точка n первого ромба - еще в 10 раз. И того вся система уменьшается в 10. 10=100 раз. Если микроскоп, которым пользуются, увеличивает также в 100 раз, то укрепленный в точке n конец микроиглы будет ходить в поле зрения микроскопа с той же скоростью, что и точка m′. Следовательно, незаметные для глаза колебания манипулирующей руки будут незаметны и в поле зрения микроскопа.
В случае необходимости, увеличивая соотношение длин плеч рычагов b, a, b′ и а′, можно повысить точность в любое количество раз.
Так как укреплять микроиглу таким образом, чтобы кончик ее совпал с точкой n, трудно и неудобно, то точка n соединена шарниром с точкой 4 планки е (фиг. 2). На другом конце планки е припаян (или привинчен накрепко) штатив G с укрепленной на нем микроиглой 5. Планка е вместе с штативом G лежит на планке ƒ, имеющей лопатовидное расширение, служащее для большей устойчивости штатива G. Планки е и ƒ скреплены между собой шарниром; кроме того, план а ƒ шарнирно укреплена в точке 6 на основной доске. При движении точки 4 конец микроиглы 5 будет копировать движения точки 4. При таком устройстве микроиглу можно легко подставить под объектив микроскопа, а имея планки е и ƒ достаточной длины, можно не очень заботиться о точной установке микроиглы по отношению ко всей системе рычагов, это было бы неизбежным, если бы конец ее устанавливали в точке n (или над ней).
На фиг. 3, изображающей прибор для одной руки в целом (вид сверху), ромбы для удобства помещены один над другим. Между обоими ромбами проложена металлическая (лучше стеклянная) пластинка 7, форма круга с двумя лопастями, на которых лежит (и скользит при работе) верхний ромб a′ b′ c′ d′. Верхний ромб не укреплен на основной доске, как было указано на фиг. 1, а подвешен в точке 2 помощью винта к детали 8, верхняя перекладина которой имеет форму тупоугольную. Деталь 8 прикреплена винтами 9 к основной доске. Нижний ромб abcd в точке 1 укреплен винтом на основной доске, по которой он скользит при работе, и следовательно помещен под пластиной 7, отстоящей на некотором расстоянии над доской U. Ромбы соединены между собой, как показано на фиг. 4. Заштрихованная полоса U изображает разрез основной доски. Подъемный механизм, имеющий вертикальные движения, устроен на основе гидравлической передачи. Он состоит (фиг. 5) из двух резиновых груш 11, 13, соединенных при помощи воронок 12 и толстостенной резиновой трубки 14 между собой. В систему наливается вода, масло или ртуть. Резиновая груша 11 помещена в металлическом стакане 10, привинченном к верхнему ромбу в вершине m′. Если винт 15 ввинчивать через отверстие в стакане 10, то он начинает давить на грушу 11 с жидкостью, которая по трубке 14 проходит в грушу 13, расширяя ее упругие стенки. Под влиянием давления винт 16 вместе с иглодержателем приподнимается, а конец микроиглы 5 опускается. Как только винт 15 вывинчивают из стакана, жидкость, нагнетаемая винтом 16, с помощью пружинящей пластинки 17 снова переливается в грушу 11.
На фиг. 6 изображен штатив G в увеличенном виде, здесь ясно без описания как укреплен иглодержатель 21, прижимаемый винтом S. Винт 15 служит для регулирования степени давления на грушу 13. Самое же давление, как было сказано осуществляется с одной стороны стенками резиновых груш и жидкостью в них, а с другой стороны - пружинящей пластинкой 17. Кремальеры 18, 19 и 20 служат для грубой установки кончика микроиглы 5 в поле зрения микроскопа.
Фиг. 7 дает общий вид двух приборов (устроенных совершенно одинаково) для двух рук. Они закреплены на доске m, к которой зажимами 23 прикрепляются и ножки 22 микроскопа. Здесь цифрой 24 обозначен предметный столик, на котором ставится влажная камера 'Петерфи' (на чертеже отсутствует), в которой производится микроманипуляции. Экспериментатор держит в руке стакан 10 и винт на нем. Сообщая поступательное движение стакану 10, он двигает этим микроиглу 5 в горизонтальной плоскости, а  винт 15, поднимает или опускает.
винт 15, поднимает или опускает.
В видоизмененном устройстве (фиг. 8) вместо резиновых баллончиков вводится поршневое приспособление. В точке m′ привинчен цилиндрик 25 с находящимся внутри него хорошо подогнанным поршнем 26. К этому поршню приделан винтовой стержень 27, к концу 30 которого припаян колпачок 29. Вращая колпачок 29, ввинчивают стерженек 27 в снабженную винтовой нарезкой верхнюю часть 28 цилиндрика 25. Благодаря вращению стерженька 27 погружается поршень 26, который нагнетает находящийся в гидравлической системе глицерин. Глицерин из цилиндрика 25 по толстостенной резиновой трубке 14 входит в цилиндрик 31 с хорошо подогнанным поршнем 32, приподнимая последний. К поршню 32 приделан шток 33, в поперечном сечении имеющий форму прямоугольнике, на верхнем конце которого имеется площадка 34. Винт S. как и на прежних фигура имеет целью фиксировать иглодержатель 21 с микроиглой 5.
Если надо опустить микроиглу, то вращают винт 27 посредством колпачка 29 в обратную сторону. При этом поршень 26 начинает подниматься и засасывать за собою глицерин. Вследствие этого опускается поршень 32, так как на него давит снаружи атмосферное давление и не дает образовываться под поршнем вакууму; вместе с поршнем опускается и площадка 34 с иглодержателем и микроиглой 5. Величина цилиндров 25 и 31 подбирается таким образом, чтобы объем цилиндра 31 превышал в несколько раз объем цилиндра 25. Тогда можно достичь чрезвычайной постепенности вертикальных движений. В тех случаях когда надо сразу сильно сместить микроиглу в вертикальном направлении (например установка с новым микроскопом, не все микроскопы имеют одинаковую высоту предметного столика), пользуются цилиндром 35 с поршнем 36. Последний может двигаться внутри всего цилиндра только посредством вращения винта 37 (как и поршень 26). Объем цилиндр 35 имеет такой же, как и цилиндр 31. Через посредство пологотройничка 38 цилиндр 35 включен в гидравлическую систему. Под давлением поршня 36, создаваемым вращением винта 37, глицерин, который находится в цилиндре 35, может перемещаться только в цилиндр 31, так как перемещение поршня 26 в цилиндре 25 тоже совершается при помощи винта.
Цилиндр 31 сидит на площадке 39. Эта последняя посажена на салазки, которые имеют целью посредством винта 40 давать возможность делать большие движения микроиглой вправо и влево, для более грубой установки в поле зрения микроскопа. Для больших движений микроиглы вперед и назад имеется винт 41, который посредством червячной передачи вращает зубчатое колесо 42. Зубчатое колесо имеет в центре прямоугольное отверстие, в которое входит шток 33. Зубчатое колесо имеет в центре прямоугольное отверстие, в которое входит шток 33. Зубчатое колесо 42 снабжено снизу бортом, входящим в цилиндр 31.
В желобок 43 входят кончики винтов 44. Их цель - удерживать зубчатое колесо 42 от поднятия кверху, но давать ему возможность вращаться. Вращая винт 41, поворачивают зубчатку 42, которая этим самым поворачивает шток 33 и двигает микроиглу вперед и назад.
Рама 45 свободно скользит по поверхности основной доски U. Соединение с рычажным механизмом для микроманипуляций в горизонтальной плоскости происходит попрежнему при посредстве планки е, конец которой загнут кверху, чтобы его можно было удобнее привинтить к раме 45. Планка ƒ коленообразно изогнута и с одной стороны шарнирно скреплена винтом 46 с рамой, а с другой стороны, попрежнему, винтом 6 привинчена к основной доске U.
| название | год | авторы | номер документа |
|---|---|---|---|
| Микроманипулятор | 1934 |
|
SU41217A1 |
| МИКРОМАНИПУЛЯТОР | 1933 |
|
SU38800A1 |
| Микроманипулятор | 1935 |
|
SU46715A1 |
| Приспособление для управления движением микроинструмента микроманипулятора | 1935 |
|
SU46716A1 |
| УСТРОЙСТВО К МИКРОСКОПУ ДЛЯ АНАЛИЗА ГОРНЫХ ПОРОД ПО ЛИНЕЙНОМУ МЕТОДУ | 1932 |
|
SU41239A1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ МИКРОСКОПИЧЕСКИХ ИЗОБРАЖЕНИЙ С ПОМОЩЬЮ ЗЕРКАЛА И СИСТЕМА И СПОСОБ КАЛИБРОВКИ ПОЛОЖЕНИЯ МИКРОИГЛЫ | 2018 |
|
RU2713074C1 |
| УСТРОЙСТВО ДЛЯ ЧЕРЧЕНИЯ | 1928 |
|
SU38011A1 |
| СИСТЕМА ХИРУРГИЧЕСКОЙ НАВИГАЦИИ И МИКРОМАНИПУЛЯЦИЙ | 2019 |
|
RU2723762C1 |
| Прибор для механического вычерчивания аксонометрических проекции, симметрических фигур, обращенных изображений и для копирования чертежей | 1923 |
|
SU564A1 |
| Аппарат для записей по системе копиручета | 1929 |
|
SU19232A1 |

1. Микроманипулятор, отличающийся применением пантографного механизма, состоящего из двух шарнирно соединенных между собою в точке m шарнирных ромбов abcd и а′b′с′d′ стороны b и b′ которых устроены поворотными на осях 1 и 2, делящих эти стороны в определенном соотношении, к продолжению же стороны а одного из ромбов шарнирно присоединена планка е (фиг. 2 и 5), управляющая движениями штатива G, несущего микроиглу 5, с целью перемещения ее в горизонтальной плоскости при горизонтальном перемещении свободной вершины m′ второго ромба.
2. В микроманипуляторе по п. 1 применение установленного на в аршине m′ второго ромба стакана 10 с резиновой грушей 11, заполненной жидкостью и соединенной резиновой трубкой 14 с подобной же грушей 13, подложенной под рычаг с микроиглой 5 и служащей для вертикального перемещения микроиглы при нажатии винтом 15 на грушу 11.
3. Видоизменение микроманипулятора по пп. 1 и 2, отличающееся тем, что вместо резиновых груш применены цилиндры 25 и 31 с поршнями 26 и 32, и кроме того, для быстрого перемещения микроиглы 5 в вертикальном направлены в соединительную трубку 14 включен тройник 38 с дополнительным цилиндром 35 с поршнем 36, а для быстрого перемещения микроиглы 5 в горизонтальной плоскости служат кремальеры 40 и 41.
