Изобретение относится к квантовой электронике, конкретно к способам формирования световых пятен от излучения концентрических излучателей и может быть использовано при создании технологических устройств, в частности, интегрированных в конструкцию газотурбинного двигателя, для адаптивного управления размерами световых пятен на динамическом объекте.
Наиболее близким по технической сущности и достигаемому результату является способ формирования размеров светового пятна на динамическом объекте, включающий определение местоположения динамического объекта, измерение расстояния до объекта и фиксирование отраженного от объекта излучения на главном сферическом фокусирующем зеркале после прохождения полупрозрачного зеркала, усиление отраженного излучения, направление усиленного излучения обратно на динамический объект и формирование светового пятна. /RU 2497064 С2 МПК F41H 13/00 H01S 3/23 Опубликовано: 27.10.2013/
Наиболее близким устройством для реализации способа является, известное устройство адаптивного управления размерами светового пятна на динамическом объекте, содержащее главное сферическое фокусирующее зеркало, деформируемое зеркало с датчиком контроля теплового состояния, датчик измерения расстояния до светового пятна по фокальной оси фокусирующего зеркала на динамическом объекте, при этом датчик соединен с автоматической системой компенсации формы оптических поверхностей главного фокусирующего и деформируемого зеркал. /Ермолаева Е.В., Зверев В.А., Филатов А.А. Адаптивная оптика. - Санкт-Петербург, СПб:НИУ ИТМО, 2012 г., Рис. 1.11 с. 33-34/
Недостатками известного способа формирования размеров светового пятна на динамическом объекте, является то, что излучение от главного сферического фокусирующего зеркала после прохождения полупрозрачного зеркала, направленное обратно на динамический объект имеет определенный угол расходимости, то есть представляет собой световой конус с вершиной в центре сферы. Ось его проходит через центр сферы резонатора, и точку нахождения объекта в пространстве в момент отражения от нее луча подсветки. Поскольку за время движения светового луча от объекта к фокусирующему зеркалу и обратно, объект сместится в сторону и одновременно приблизится или удалится от точки «отражения», то формирование на нем четкого светового пятна практически невозможно. Отражения от динамического объекта луча подсветки являются незначительными, их усиление становится недостаточным для формирования на объекте четкого светового пятна.
Недостатком известного устройства является то, что оно также не позволяет усилить отраженный сигнал до мощности достаточной для формирования на объекте четкого светового пятна. Известное устройство не может быть интегрированного в конструкцию газотурбинного двигателя.
Задача изобретения разработать способ и устройство позволяющие формировать на динамическом объекте четкие световые пятна (изображения).
Ожидаемый технический результат повышение мощности излучения формирующего на объекте световое пятно (изображение) и возможность компенсации угла расходимости светового излучения в зависимости от расстояния до динамического объекта.
Другим результатом является возможность интегрирования устройства в конструкцию газотурбинного двигателя.
Ожидаемый технический результат достигается тем, что в известном способе формирования размеров светового пятна на динамическом объекте, включающем определение местоположения динамического объекта, измерение расстояния до объекта и фиксирование отраженного от объекта излучения на главном сферическом фокусирующем зеркале после прохождения полупрозрачного зеркала, усиление отраженного излучения, направление усиленного излучения обратно на динамический объект и формирование светового пятна, по предложению, в качестве полупрозрачного зеркала используют деформируемое выпуклое охлаждаемое полупрозрачное зеркало с изменяющимся радиусом кривизны, а отраженное излучение усиливают резонатором формирования луча лазера, установленным на поверхности главного сферического фокусирующего зеркала, оптически направленным на деформируемое зеркало, при этом по фокальной оси фокусирующего зеркала измеряют расстояние до динамического объекта, на котором формируют площадь светового пятна, а при направлении усиленного излучения обратно на объект, с помощью средств компенсации формы оптических поверхностей главного фокусирующего и деформируемого зеркал, изменяют радиус кривизны отражающих поверхностей с одновременным изменением положения мнимого фокуса пропорционально углу фокусировки светового луча на динамическом объекте и формируют заданные размеры светового пятна. Определение местоположения можно производить путем подачи излучения от лазера на динамический объект. Заданные размеры светового пятна на динамическом объекте можно поддерживать постоянными независимо от расстояния до объекта, отражающая область выпуклого фокусирующего зеркала может быть выполнена близкой к параболической поверхности, а отражающая поверхность деформируемого выпуклого зеркала после деформации выполнена близкой к гиперболической поверхности, при этом управляющую силу деформации выпуклого полупрозрачного фокусирующего зеркала определяют пропорционально дальности от угла фокусировки лазерного луча на динамическом объекте по зависимости:

где: kF - коэффициент усиления, определяется САУ корректирующего устройства выпускного рефлектора;. da - диаметр выходной апертуры, формируемой и управляемой по направлению оптической системы; ωзад - заданный радиус светового пятна на динамическом объекте; Di(t) - текущая дальность; Θ(D(t)) - угол фокусировки лазерного луча.
Для реализации способа при достижении технического результата, в известном устройстве адаптивного управления размерами светового пятна на динамическом объекте, содержащем главное сферическое фокусирующее зеркало, деформируемое зеркало с датчиком контроля теплового состояния, датчик измерения расстояния до светового пятна по фокальной оси фокусирующего зеркала на динамическом объекте, соединенный с автоматической системой компенсации формы оптических поверхностей главного фокусирующего и деформируемого зеркал, по предложению, устройство снабжено резонатором для формирования луча лазера, установленным на поверхности главного сферического фокусирующего зеркала и оптически направленным на деформируемое зеркало. Главное сферическое фокусирующее зеркало и корректирующее устройство установлены на подвижной платформе управляемой оптико-электронной системой определения местоположения, сопровождения и определения дальности (расстояния) до динамического объекта, а в корректирующем устройстве установлено деформируемое выпуклое (с положительным выпуклым мениском) охлаждаемое зеркало, температура отражающей поверхности которого контролируется системой датчиков.
Сущность способа формирования размеров светового пятна на динамическом объекте заключается в выполнении известного Закона формирования сходимости лазерного луча в системе оптического резонатора лазера:

математическая модель, которого полностью согласуется с полученным Законом управления, корректирующим устройством формирующей оптики постоянной площади светового пятна лазера на динамическом объекте не зависимо от текущей дальности, приведенным к виду


где: ωo и Θо - радиус перетяжки «горла» и угол расхождения лазерного луча в оптическом резонаторе; λ - длина волны излучения; ωзад - заданный радиус светового пятна на динамическом объекте; Θi(t) - регулируемый угол схождения луча корректирующей оптической системой в зависимости от дальности Di(t) динамического объекта; da - заданная апертура корректирующей оптической системы;

где Do - дальность (расстояние)захвата динамического объекта; Vo(t) и Vp(t) - скорости носителя лазерной системы и динамического объекта соответственно; ψ(t) и βp(t) - углы векторов скорости носителя лазерной системы и динамического объекта соответственно относительно линии визирования объекта; to=0 - время определения местоположения объекта и начало сопровождение; tnop - время формирования размеров светового пятна на динамическом объекте.
Местоположение динамического объекта можно определять по отраженному от объекта излучению в видимом, инфракрасном, радиолокационном и другом диапазоне. В предложении допускается определение местоположения производить путем подачи излучения от лазера на динамический объект.
Чтобы обеспечить максимальную концентрацию энергии лазерного излучения на динамическом объекте заданные размеры светового пятна на динамическом объекте поддерживают постоянными независимо от расстояния до объекта.
Для обеспечения более четкого изображения на динамическом объекте управляющую силу деформации выпуклого полупрозрачного фокусирующего зеркала определяют пропорционально дальности от угла фокусировки лазерного луча на динамическом объекте по зависимости:

где: kF - коэффициент усиления, определяется САУ корректирующего устройства выпускного рефлектора;. da - диаметр выходной апертуры, формируемой и управляемой по направлению оптической системы; ωзад - заданный радиус светового пятна на динамическом объекте; Di(t) - текущая дальность; Θ(D(t)) - угол фокусировки лазерного луча.
Для увеличения надежности главное сферическое фокусирующее зеркало и корректирующее устройство могут быть установлены на подвижной платформе управляемой оптико-электронной системой слежения (ОЭСС), сопровождения и определения дальности (расстояния) до динамического объекта, а в корректирующем устройстве установлено деформируемое выпуклое (с положительным выпуклым мениском) охлаждаемое зеркало, температура отражающей поверхности которого контролируется системой датчиков.
Заявляемый способ формирования размеров светового пятна на динамическом объекте и конструкция устройства адаптивного управления размерами светового пятна на динамическом объекте поясняется графическими материалами.
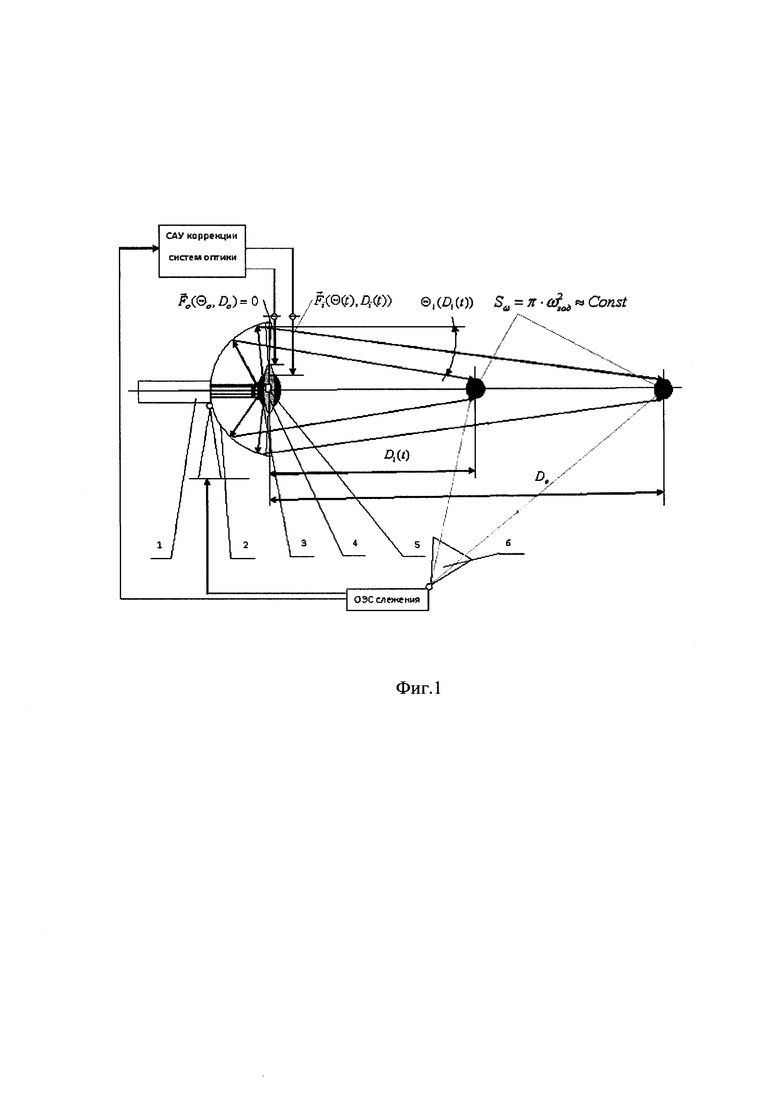
Фиг. 1 - схема устройства адаптивного управления размерами светового пятна на динамическом объекте;
Фиг. 2 - схема формирования светового излучения;
Фиг. 3 - структурная схема системы автоматического управления (САУ);
Фиг. 4 - изменение угла фокусировки светового луча САУ корректирующей оптикой по времени сопровождения динамического объекта;
Фиг. 5 - изменение силы деформации кривизны выпуклого зеркала выработанной САУ корректирующей оптикой по времени сопровождения динамического объекта;
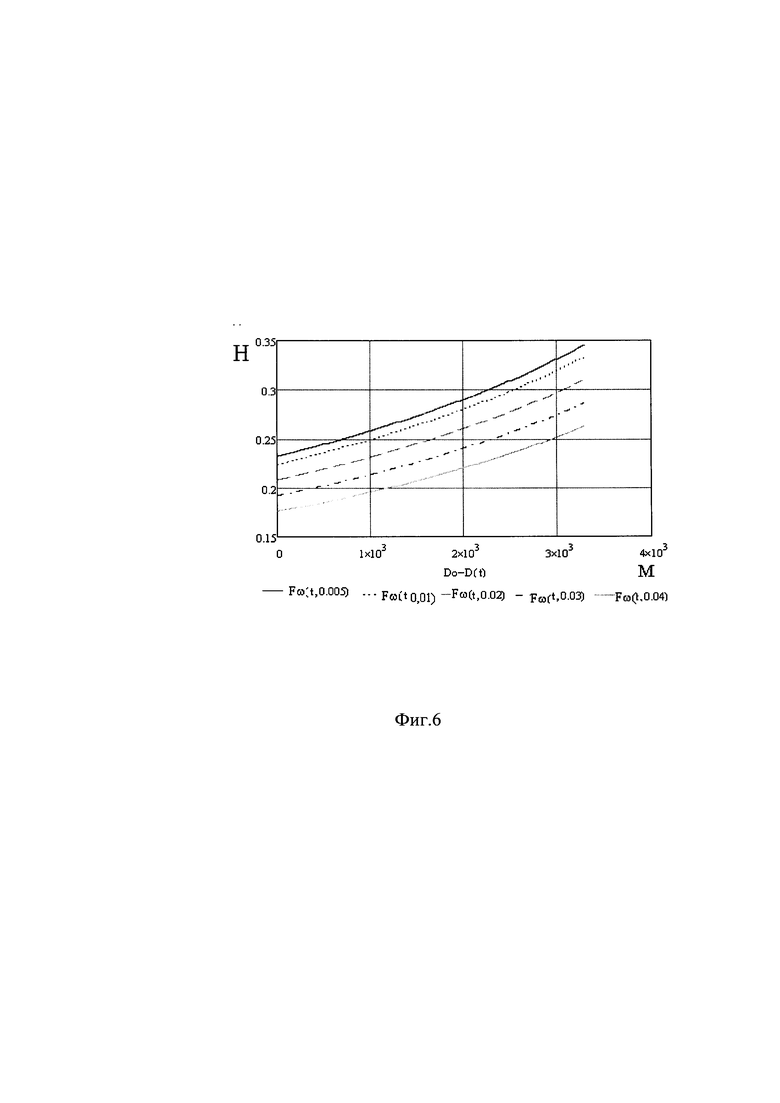
Фиг. 6 - изменение силы деформации кривизны выпуклого зеркала выработанной САУ корректирующей оптикой по дальности сопровождения динамического объекта.
Устройство адаптивного управления размерами светового пятна на динамическом объекте, содержит резонатор 1 формирования луча лазера, главное сферическое фокусирующие зеркало 2 с заданной апертурой выхода, составное деформируемое зеркало 3 и 4, датчик 5 контроля теплового состояния выпуклой поверхности деформируемого зеркала, датчик 6 измерения расстояния до светового пятна по фокальной оси фокусирующего зеркала на динамическом объекте, интегрированный в электронную систему слежения и сопровождения (ОЭСС). В качестве датчика для измерения расстояния может использоваться лазер подсветки (наведения). Датчик 6 соединен с автоматической системой компенсации (САУ) формы оптических поверхностей главного фокусирующего 2 и деформируемого 3 и 4 зеркал. Резонатор 1 формирования луча лазера, установлен на поверхности главного сферического фокусирующего зеркала 2 и оптически направлен на составное деформируемое зеркало 3 и 4.
Устройство при реализации способа формирования размеров светового пятна на динамическом объекте работает следующим образом.
По сигналу оптико-электронной системы слежения и сопровождения (ОЭСС), определяющей дальность и направление движения динамического объекта, включается лазерная установка состоящая (см. Фиг. 1 и 2) из лазера 1, управляемого по направлению выходного рефлектора с заданной апертурой 2, специально охлаждаемого деформируемого выпуклого зеркала с положительной мениском 3 с системой датчиков контроля теплового состояния 5 и системой автоматического управления (САУ) коррекцией адаптивной оптики (см. Фиг. 3), которая работает по замкнутому циклу с обратной отрицательной связью: датчик волнового фронта ОЭСС определяет направление и измеряет дальность до носителя объекта и посылает соответствующие команды корректирующей системы деформируемого зеркала 3. Небольшие недостатки деформируемого зеркала (такие как гистерезис или статические аберрации) не очень важны: они исправляются автоматически, вместе с атмосферными аберрациями.
В момент слежения за динамическим объектом в сопровождение, на заданной дальности  , деформируемое выпуклое зеркало 3 находится в «нулевом» состоянии регулирования, при котором световое пятно лазера на объекте определено апертурой выпускающего рефлектора 2 с заданным da диаметром. В момент слежения и сопровождения, сила управления кривизной зеркала равна нулю:
, деформируемое выпуклое зеркало 3 находится в «нулевом» состоянии регулирования, при котором световое пятно лазера на объекте определено апертурой выпускающего рефлектора 2 с заданным da диаметром. В момент слежения и сопровождения, сила управления кривизной зеркала равна нулю:  при заданном предварительно расстоянии
при заданном предварительно расстоянии  , определяющий, например, радиус ближнего действия Направление излучения лазера в момент контакта с объектом на Фиг. 2 обозначены значком (∞) бесконечности. При этом мнимый фокус выпуклого деформируемого зеркала 3 совпадает (fo=fд,з) с фокусом выпускающего управляемого рефлектора 2. По мере изменения расстояния (дальности Di(t)) до динамического носителя пятна, в автоматическом режиме, независимо от сближения или удаления носителя, под воздействием управляющей силы
, определяющий, например, радиус ближнего действия Направление излучения лазера в момент контакта с объектом на Фиг. 2 обозначены значком (∞) бесконечности. При этом мнимый фокус выпуклого деформируемого зеркала 3 совпадает (fo=fд,з) с фокусом выпускающего управляемого рефлектора 2. По мере изменения расстояния (дальности Di(t)) до динамического носителя пятна, в автоматическом режиме, независимо от сближения или удаления носителя, под воздействием управляющей силы  (здесь kf коэффициент усиления системы автоматического управления, (см. Фиг. 3) меняется радиус кривизны зеркала 3 Rд,з(Θ(t)) по определенному параметру САУ: - Θ(D(t)) с одновременным смещением мнимого фокуса зеркала 3 в сторону выпускающего рефлектора 2. Смещение мнимого фокуса деформируемого зеркала относительно фокуса рефлектора 2 происходит таким образом, чтобы на определенной дальности динамического объекта Di(t) образовалось световое пятно лазерного излучения с предварительно заданным 2ωзад диаметром. Время экспозиции
(здесь kf коэффициент усиления системы автоматического управления, (см. Фиг. 3) меняется радиус кривизны зеркала 3 Rд,з(Θ(t)) по определенному параметру САУ: - Θ(D(t)) с одновременным смещением мнимого фокуса зеркала 3 в сторону выпускающего рефлектора 2. Смещение мнимого фокуса деформируемого зеркала относительно фокуса рефлектора 2 происходит таким образом, чтобы на определенной дальности динамического объекта Di(t) образовалось световое пятно лазерного излучения с предварительно заданным 2ωзад диаметром. Время экспозиции  теплового пятна лазера на объекте заданной переменной дальности Di(t) определяется временем сопровождения носителя объекта по командам САУ в зависимости от физического состояния объекта и эффективности специальной системы охлаждения выпускающей оптической системы, которая контролируется системой датчиков 5. Рабочие процессы способа адаптивного управления размером светового пятна лазерного луча на динамическом объекте прекращаются по команде САУ после оценки системой сопровождения (ОЭСС) состояния изображения на объекте: критическое разрушение размеров изображения, локальное повреждение изображения или по команде теплового датчика 5.
теплового пятна лазера на объекте заданной переменной дальности Di(t) определяется временем сопровождения носителя объекта по командам САУ в зависимости от физического состояния объекта и эффективности специальной системы охлаждения выпускающей оптической системы, которая контролируется системой датчиков 5. Рабочие процессы способа адаптивного управления размером светового пятна лазерного луча на динамическом объекте прекращаются по команде САУ после оценки системой сопровождения (ОЭСС) состояния изображения на объекте: критическое разрушение размеров изображения, локальное повреждение изображения или по команде теплового датчика 5.
Нестационарный процесс управления замкнутым циклом системы коррекции (САУ) площади светового пятна на динамическом объекте, представленной на рисунке 3, состоит в следующем: входным сигналом САУ является -  , который передается в сумматор и далее в измерительное устройство с оператором Wиз,у(р), где вырабатывается измеренный сигнал пропорциональный
, который передается в сумматор и далее в измерительное устройство с оператором Wиз,у(р), где вырабатывается измеренный сигнал пропорциональный  через корректирующее звено обратной отрицательной связи с оператором Wс.к(p) и формируется параметр рассогласования заданной точности определения текущей дальности динамической мишени:
через корректирующее звено обратной отрицательной связи с оператором Wс.к(p) и формируется параметр рассогласования заданной точности определения текущей дальности динамической мишени:  При достижении заданной точности определения текущей дальности Di(t) и заданных предварительно параметрах: da - диаметра выходной апертуры формирующей управляемой по направлению оптической системы с рефлектором 2 и ωзад - радиуса светового пятна на динамическом объекте, вырабатывается сила управления
При достижении заданной точности определения текущей дальности Di(t) и заданных предварительно параметрах: da - диаметра выходной апертуры формирующей управляемой по направлению оптической системы с рефлектором 2 и ωзад - радиуса светового пятна на динамическом объекте, вырабатывается сила управления  деформацией отражающей поверхности выпуклого зеркала 3, которая определяет постоянную, заданную площадь светового пятна луча лазера на динамическом объекте на текущей дальности. Площадь светового пятна луча лазера остается постоянной
деформацией отражающей поверхности выпуклого зеркала 3, которая определяет постоянную, заданную площадь светового пятна луча лазера на динамическом объекте на текущей дальности. Площадь светового пятна луча лазера остается постоянной  независимо от изменяемой дальности (сближение или удаление) динамического объекта после его определения в слежение и сопровождение ОЭСС. Закон управления деформацией выпуклой поверхности зеркала, вырабатываемый САУ системы коррекции в зависимости от дальности динамического объекта приводится к виду
независимо от изменяемой дальности (сближение или удаление) динамического объекта после его определения в слежение и сопровождение ОЭСС. Закон управления деформацией выпуклой поверхности зеркала, вырабатываемый САУ системы коррекции в зависимости от дальности динамического объекта приводится к виду

где: - текущая дальность объекта Di(t) определена зависимостью (4).
Пример
Способ реализован при следующих значениях исходных параметров. Расстояние до динамического объекта на подвижной платформе, в момент взятия в сопровождение Do=10000 м;
Скорость платформы носителя с объектом Vp=1200 м/с; Скорость платформы носителя лазерной системы Vo=350 м/с; Коэффициент усиления САУ системы коррекции kF=8⋅103.
На графиках приведены: изменения угла фокусировки лазерного луча на объекте по времени Фиг. 4; изменения силы деформации деформируемого зеркала в зависимости от времени сопровождения Фиг. 5, и изменения силы деформации от дальности динамическго объекта при сближении показаны Фиг. 6. Из приведенных данных следует:
При заданном радиусе светового пятна на объекте: графики сверху вниз - ωзад=0,005 м; - 0,01 м; - 0,02 м; - 0,03 м; - 0,04 м.
Определено местоположение и начато сопровождение динамического объекта через to=14 сек на дальности 10000 метров.
При времени сближения от момента начала сопровождения объекта до точки встречи основного усиленного излучения Δt=4 сек, расстояние приблизительно составило 6700 м.
Применение изобретения позволяет повысить мощность излучения формирующего на объекте световое пятно (изображение), позволяет компенсировать угол расходимости светового излучения в зависимости от расстояния до динамического объекта, тем самым улучшить качество изображения на динамическом объекте. Использование в предлагаемом устройстве дополнительного линейного резонатора дает возможность интегрировать устройство в конструкцию газотурбинного двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2292566C1 |
| Адаптивная система апертурного зондирования компенсации искажений волнового фронта в лазерных системах | 2022 |
|
RU2791833C1 |
| Оптическая система формирования и наведения лазерного излучения | 2016 |
|
RU2663121C1 |
| АДАПТИВНЫЙ ОПТИЧЕСКИЙ МОДУЛЬ | 1996 |
|
RU2084941C1 |
| Устройство ультразвуковой визуализации объектов в жидких средах (варианты) | 2017 |
|
RU2650348C1 |
| Устройство фокусировки для лазерной обработки | 2020 |
|
RU2760443C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 1992 |
|
RU2044272C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ЛАЗЕРНОГО ПУЧКА | 1994 |
|
RU2083039C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2372628C1 |
| Кольцевой объёмный оптический резонатор | 2018 |
|
RU2696944C1 |
Изобретение относится к квантовой электронике, конкретно к способам формирования световых пятен от излучения концентрических излучателей, и может быть использовано при создании технологических устройств, в частности, интегрированных в конструкцию газотурбинного двигателя, для адаптивного управления размерами световых пятен на динамическом объекте. Предложенные способ и устройство для его реализации за счет дополнительного резонатора усиления лазерного луча и системы фокусировки светового пятна на динамическом объекте с помощью полупрозрачного деформируемого зеркала позволяют повысить мощность излучения, формирующего на объекте световое пятно (изображение), позволяют компенсировать угол расходимости светового излучения в зависимости от расстояния до динамического объекта, тем самым улучшить качество изображения на динамическом объекте. Использование в предлагаемом устройстве дополнительного линейного резонатора дает возможность интегрировать устройство в конструкцию газотурбинного двигателя. 2 н. и 6 з.п. ф-лы, 6 ил.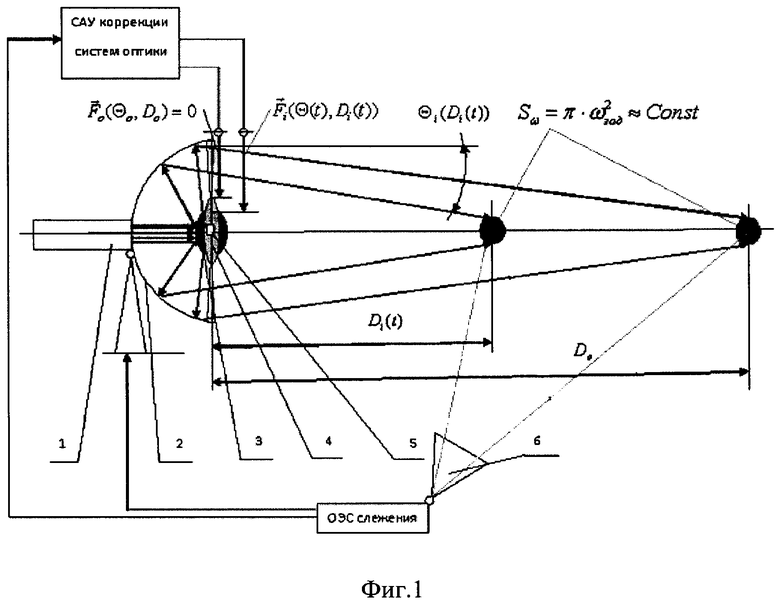
1. Способ формирования размеров светового пятна на динамическом объекте, включающий определение местоположения динамического объекта, измерение расстояния до объекта и фиксирование отраженного от объекта излучения на главном сферическом фокусирующем зеркале после прохождения полупрозрачного зеркала, усиление отраженного излучения, направление усиленного излучения обратно на динамический объект и формирование светового пятна, отличающийся тем, что в качестве полупрозрачного зеркала используют деформируемое выпуклое охлаждаемое полупрозрачное зеркало с изменяющимся радиусом кривизны, а отраженное излучение усиливают резонатором формирования луча лазера, установленным на поверхности главного сферического фокусирующего зеркала, оптически направленным на деформируемое зеркало, при этом по фокальной оси фокусирующего зеркала измеряют расстояние до динамического объекта, на котором формируют площадь светового пятна, а при направлении усиленного излучения обратно на объект, с помощью средств компенсации формы оптических поверхностей главного фокусирующего и деформируемого зеркал, изменяют радиус кривизны отражающих поверхностей с одновременным изменением положения мнимого фокуса пропорционально углу фокусировки светового луча на динамическом объекте и формируют заданные размеры светового пятна.
2. Способ формирования размеров светового пятна на динамическом объекте по п. 1, отличающийся тем, что определение местоположения производят путем подачи излучения от лазера на динамический объект.
3. Способ формирования размеров светового пятна на динамическом объекте по п. 1, отличающийся тем, что заданные размеры светового пятна на динамическом объекте поддерживают постоянными независимо от расстояния до объекта.
4. Способ формирования размеров светового пятна на динамическом объекте по п. 1, отличающийся тем, что управляющую силу деформации выпуклого полупрозрачного фокусирующего зеркала определяют пропорционально дальности от угла фокусировки лазерного луча на динамическом объекте по зависимости
 ,
,
где kF - коэффициент усиления, определяется САУ корректирующего устройства выпускного рефлектора; da - диаметр выходной апертуры, формируемой и управляемой по направлению оптической системы; ωзад - заданный радиус светового пятна на динамическом объекте; Di(t) - текущая дальность; Θ(D(t)) - угол фокусировки лазерного луча.
5. Способ по п. 1, отличающийся тем, что отражающая область выпуклого фокусирующего зеркала выполнена близкой к параболической поверхности, а отражающая поверхность деформируемого выпуклого зеркала после деформации остается близкой к гиперболической поверхности.
6. Устройство адаптивного управления размерами светового пятна на динамическом объекте, содержащее главное сферическое фокусирующее зеркало, деформируемое зеркало с датчиком контроля теплового состояния, датчик измерения расстояния до светового пятна по фокальной оси фокусирующего зеркала на динамическом объекте, при этом датчик соединен с автоматической системой компенсации формы оптических поверхностей главного фокусирующего и деформируемого зеркал, отличающееся тем, что оно снабжено резонатором для формирования луча лазера, установленным на поверхности главного сферического фокусирующего зеркала и оптически направленным на деформируемое зеркало.
7. Устройство адаптивного управления размерами светового пятна на динамическом объекте по п. 6, отличающееся тем, что главное сферическое фокусирующее зеркало и корректирующее устройство установлены на подвижной платформе управляемой оптико-электронной системой захвата, сопровождения и определения дальности (расстояния) до динамического объекта.
8. Устройство адаптивного управления по п. 6, отличающееся тем, что в корректирующем устройстве установлено деформируемое выпуклое (с положительным выпуклым мениском) охлаждаемое зеркало, температура отражающей поверхности которого контролируется системой датчиков.
| ЛАЗЕРНАЯ СИСТЕМА ПОРАЖЕНИЯ ЦЕЛИ | 2011 |
|
RU2497064C2 |
| Многоходовая зеркально-кольцевая система для исследования осесимметричных объектов | 1987 |
|
SU1529162A1 |
| Устройство для обработки объектов лазерным излучением | 1975 |
|
SU638207A2 |
| ДИСКОВЫЙ ЛАЗЕР (ВАРИАНТЫ) | 2013 |
|
RU2582909C2 |
| СПОСОБ И УСТРОЙСТВО ОТОБРАЖЕНИЯ ПРОСТРАНСТВЕННЫХ ОБЪЕКТОВ | 1998 |
|
RU2143718C1 |
| US 20150349483 А1, 03.12.2015 | |||
| US 20100231858 А1, 16.09.2010. | |||

