Изобретение относится к оптической технике, лазерной локации и может быть использовано для поиска, обнаружения и автоматического сопровождения объектов с определением их пространственных координат. Изобретение может найти применение в геодезии, навигации, лазерной дальнометрии, системах управления воздушным движением, в системах предупреждения столкновений, исследовании окружающей среды.
Системы лазерной локации, как правило, содержат лазер, работающий в импульсном режиме, оптический канал для передачи лазерного излучения в исследуемое пространство, оптический канал для приема отраженного от объекта лазерного излучения, фотоприемное устройство, обеспечивающее прием отраженного от объекта лазерного излучения, сканирующее устройство и блок управления, в общем случае содержащий вычислительное устройство для обработки сигналов, выдачи пространственных координат объекта и управляющих команд [«Лазерная локация», под ред. Н.Д.Устинова, М.: Машиностроение, 1984].
В системах поиска, обнаружения и сопровождения объектов лазерные локационные средства могут использоваться вместе с другими средствами поиска, в частности РЛС, теплопеленгаторами, и т.д., которые осуществляют выдачу азимутальных и угломестных координат для наведения луча оптического локатора на объекты.
Известна оптико-локационная система для определения местоположения движущихся объектов [Патент RU 2032918, БИ №10, стр.202, 1995], содержащая оптически связанные лазерный передатчик, вращающийся измеритель азимута и угла места, вращающееся однострочное оптико-механическое сканирующее устройство, контрольный фотоприемник, датчик угломестных координат, схему сравнения, лазерный приемник, модулятор, измеритель дальности, индикатор дальности. Вращающийся измеритель азимута и угла места осуществляет определение азимута и угла места целей в процессе кругового обзора. Он может представлять собой РЛС или теплопеленгатор. Синхронно с вращающимся измерителем азимута и угла места вращается однострочное механическое сканирующее устройство, осуществляющее формирование развертки лазерного передатчика, работающего в ждущем импульсном режиме. Когда угломестный код с выхода вращающегося измерителя угла места совпадет с угломестным кодом, поступающим с датчика угломестных координат, срабатывает схема сравнения, выходной сигнал которой обеспечивает формирование модулятором сигнала, разрешающего излучение светового импульса лазерным передатчиком. Дальность определяется в измерителе дальности по временному рассогласованию между сигналом с выхода модулятора и сигналом с выхода лазерного приемника.
К недостаткам данной оптико-локационной системы можно отнести то, что она не обладает многофункциональностью, так как ориентирована на решение одной специальной задачи, предполагает использование конструктивно практически не связанных с друг с другом теплопеленгатора (или РЛС) для получения данных по азимуту и углу места объектов и лазерного локатора для определения координаты дальности.
Известна система для автоматического сопровождения и определения координат целей, снабженных уголковыми отражателями, включающая лазерный передатчик, приемное устройство, инфракрасный телевизир с видеоконтрольным устройством, пеленгатор, опорно-поворотное устройство и устройство обработки и регистрации результатов измерений [«Лазерная локация», под ред. Н.Д.Устинова, с.194, М.: Машиностроение, 1984]. Эта система известна как лазерный локатор PATS. В процессе поиска объектов данной системой осуществляется обзор пространства с помощью поворотного зеркала. Когда объект попадает в центр поля зрения телевизира, лазерный локатор переходит в режим автоматического сопровождения цели, одновременно измеряя положение цели и дальность до нее. Автосопровождение осуществляется по сигналам пеленгатора, который вращается синхронно с поворотом зеркала вокруг азимутальной оси. Юстировка лазерного локатора PATS осуществляется перед началом работы с помощью нескольких контрольных триангуляционных отметок. Существенным недостатком лазерного локатора PATS является его чрезмерная громоздкость, необходимость стабилизации шасси, на котором расположен локатор, с помощью независимых опорных домкратов, отдельная достаточно сложная юстировка всей системы. Все это снижает автономность и мобильность локационной системы и препятствует ее широкому использованию.
Наиболее близким устройством того же назначения, что и заявляемое, по совокупности существенных признаков является оптико-локационная система IRATS [В.В.Протопопов, Н.Д.Устинов, «Инфракрасные лазерные локационные системы», М., 1987, с.84-92], выбранная нами в качестве прототипа. Система включает в себя импульсный лазерный передатчик, оптическую систему наведения лазерного луча, фотоприемное устройство, телевизионную камеру с системой автоматического слежения за объектом, используемую в качестве средства целеуказания, системы управления и обработки данных. Поиск объектов осуществляется с помощью телевизионной камеры, оптическая ось которой наводится на заданную точку пространства главным зеркалом системы наведения, которое может вращаться вокруг азимутальной и угломестной осей, при этом телевизионная камера может вращаться вокруг своей оси, компенсируя вращение изображения объекта в процессе сопровождения по азимуту. При обнаружении объекта включается импульсный лазерный передатчик и начинается активный режим локации. Отраженный от объекта лазерный импульс принимается телескопом и фокусируется объективом на фотодетектор. Далее на выходе фотодетектора формируются импульсные электрические сигналы, поступающие в преобразователь сигналов, связанный с блоком обработки данных, на выходе которого выдаются данные по дальности до объекта. Отклонение объекта от оптической оси приемного канала вызывает смещение пятна отраженного излучения от центра фотодетектора. Сигналы углового рассогласования Δθ (по азимуту) и Δϕ (по углу места) вводятся в цифровой процессор, где происходит формирование сигналов управления компенсаторами приемного и передающего каналов. Компенсаторы представляют собой подвижные зеркала. Сигналы управления синхронно воздействуют на приводы компенсаторов, совмещая изображение объекта в поле зрения приемного устройства с его оптической осью. При этом в основном режиме грубое слежение за объектом ведется оператором вручную или телевизионной автоматической системой с помощью приводов главного зеркала системы наведения. Оптико-механический блок локационной системы IRATS имеет два одинаковых внеосевых телескопа, расположенных параллельно один другому на некотором расстоянии между оптическими осями. Непосредственно за телескопами размещены подвижные зеркала компенсаторов, позволяющие отклонять пучки зондирующего и отраженного излучения на некоторый угол как автоматически, так и по командам с пульта оператора.
Оптико-механический блок представляет собой единую конструкцию, несущую лазерный передатчик, оптическую систему и телевизионную камеру с перископом, сопрягающим ее с оптическим трактом. Предполагается, что такая схема обеспечивает требуемую жесткость и неизменность юстировки в процессе работы. Основание всего механизма размещается на раме, которая в свою очередь опирается на домкраты, опускаемые на грунт, чем обеспечивается необходимая стабильность пространственного положения оптической оси системы.
К причинам, препятствующим достижению указанного ниже технического результата при использовании известной оптико-локационной системы, относятся следующие. Как и локационная система PATS, система IRATS характеризуется чрезмерной тяжеловесностью и громоздкостью, необходимостью осуществления особых мер по обеспечению стабильности оптической оси системы, отсутствием контроля за неизменностью юстировки системы в процессе работы. Все это снижает автономность и мобильность локационной системы, уменьшает точность измерений и ограничивает возможности использования ее в практической работе.
Сущность изобретения заключается в следующем.
Изобретение направлено на решение задачи создания компактной автономной многофункциональной оптико-локационной системы, обладающей малыми габаритом и весом, имеющей устройство автоюстировки и предназначенной для обнаружения объектов и определения их местоположения и скоростей, функционирующей как в пассивном, так и в активном режимах.
Техническим результатом изобретения является существенное уменьшение весогабаритных характеристик и упрощение конструктивной реализации оптико-локационной системы, обладающей при этом многофункциональностью, способной вести поиск объектов в пассивном и активном режимах без наличия внешнего целеуказания, осуществлять циклическое сопровождение многих объектов, при необходимости переходить к точному сопровождению выделенного объекта, определять местоположение и скорости движущихся объектов с высокой точностью. Техническим результатом изобретения является также расширение арсенала имеющихся в настоящее время оптико-электронных средств обнаружения движущихся объектов и определения их местоположения и скоростей.
Общими узлами известной оптико-локационной системы, взятой в качестве прототипа, и заявляемой в данном изобретении являются лазерный передатчик, работающий в частотно-импульсном режиме, вращающееся средство целеуказания, сопряженное с оптическими узлами лазерного локатора, фотоприемное устройство, оптический канал для передачи импульсного лазерного излучения в исследуемое пространство (передающий канал), содержащий зеркало, выходной телескоп, подвижные зеркала отклоняющего устройства, управляемые приводами, оптический канал для приема отраженного от объекта импульсного лазерного излучения (приемный канал), содержащий зеркало, приемный телескоп, аналого-цифровой преобразователь сигналов, устройство обработки сигналов, блок измерения дальности, блоки управления узлами системы.
Указанный выше технический результат достигается тем, что в известную оптико-локационную систему, включающую последовательно расположенные на оптической оси передающего канала оптически сопряженные лазерный передатчик, формирующий зондирующий пучок лазерного излучения, включающий в себя частотно-импульсный лазер с блоком накачки, первый светоделитель, устройство, отклоняющее пучок лазерного излучения, управляемое приводами по командам от блока управления устройством, отклоняющим пучок лазерного излучения, выходной телескоп, первое неподвижное отражательное плоское зеркало и второе подвижное отражательное плоское зеркало, установленные так, что плоскости зеркал параллельны друг другу и расположены в нулевом положении под углом 45° к вертикальной оси, последовательно расположенные на оптической оси приемного канала оптически сопряженные приемный телескоп и фотоприемное устройство, а также аналого-цифровой преобразователь сигналов, блок обработки сигналов и выдачи данных по местоположению объектов, центральный блок управления, средство целеуказания, при этом лазерный передатчик и фотоприемное устройство расположены на неподвижном основании, вход аналого-цифрового преобразователя сигналов связан с первым выходом фотоприемного устройства, а выход аналого-цифрового преобразователя сигналов связан со входом блока обработки сигналов и выдачи данных по местоположению объектов, вход блока управления устройства, отклоняющего пучок лазерного излучения, связан с выходом центрального блока управления, в соответствии с заявляемым техническим решением в оптико-локационную систему дополнительно введены пилотный лазер с блоком накачки, формирующий контрольный пучок лазерного излучения, второй светоделитель, генератор-синхронизатор, опорно-контрольный фотоприемник, формирующий телескоп, призма Дове, третье отражательное плоское зеркало, горизонтальная платформа, выполненная с возможностью вращения вокруг вертикальной оси, коаксиальные первый, промежуточный и второй валы вращения, связанные друг с другом подшипниками вращения, при этом промежуточный вал связан подшипниками вращения с неподвижным основанием, снабжен приводом, управляемым блоком управления вращением промежуточного вала вращения, и датчиком углового положения промежуточного вала вращения, выход которого связан со входом блока управления вращением промежуточного вала вращения, призма-ромб с круглой диафрагмой, закрепленной на выходной грани призмы-ромба, датчик отклонения оптической оси контрольного пучка лазерного излучения, блок вычисления направления оптической оси передающего канала, блок формирования изображения контролируемой зоны, выделения и сопровождения объектов, устройство отображения текущей информации, при этом в качестве средства целеуказания используется теплопеленгатор, приемный телескоп включает зеркально-линзовый объектив и уголковое зеркало компенсатора поворота изображения, выполненное с возможностью вращения вокруг оптической оси приемного телескопа, устройство, отклоняющее пучок лазерного излучения, выполнено в виде отражательного зеркала, выполненного с возможностью вращения вокруг двух взаимно перпендикулярных осей, лежащих в плоскости отражательного зеркала, снабженного двухкоординатным датчиком положения отражательного зеркала, выход которого связан со входом блока управления устройством, отклоняющим пучок лазерного излучения, призма Дове установлена так, что оптическая ось передающего канала параллельна плоскости основания призмы, выполнена с возможностью вращения вокруг оптической оси, снабжена приводом, управляемым блоком управления вращением призмы Дове, связанным с центральным блоком управления, и снабжена датчиком углового положения призмы Дове, выход которого связан со входом блока управления вращением призмы Дове, выходной телескоп связан с первым валом вращения и выполнен с возможностью синхронного вращения с горизонтальной платформой вокруг вертикальной оси, первое неподвижное отражательное зеркало выполнено с наличием второй отражательной поверхности на его обратной стороне и жестко закреплено на горизонтальной платформе, на первой отражательной поверхности первого зеркала в его центральной части закреплена прямоугольная призма с усеченной вершиной, при этом верхняя половина части поверхности первого зеркала, находящейся под призмой, выполнена полупрозрачной, соответствующая ей часть на обратной стороне первого зеркала, образуемая параллельным сдвигом полупрозрачной части поверхности первого зеркала по горизонтали до совмещения с обратной стороной первого зеркала, также выполнена полупрозрачной, второе и третье зеркала расположены на горизонтальной платформе так, что центры первого, второго и третьего зеркал лежат на одной горизонтальной оси, при этом второе и третье зеркала выполнены с возможностью синхронного вращения вокруг этой горизонтальной оси, центры второго и третьего зеркал закреплены на стойках, установленных на горизонтальной платформе, второе и третье зеркала связаны посредством систем шкивов со вторым валом вращения, который снабжен приводом, управляемым блоком управления вращением второго вала вращения, связанным с центральным блоком управления, и датчиком углового положения второго вала вращения, выход которого связан со входом блока управления вращением второго вала вращения, горизонтальная платформа соединена с первым валом вращения, снабженным приводом, управляемым блоком управления вращением первого вала вращения, связанным с центральным блоком управления, и датчиком углового положения первого вала вращения, выход которого связан со входом блока управления вращением первого вала вращения, на отражательных поверхностях в центральных частях второго и третьего зеркал закреплены прямоугольные отражательные призмы, призма-ромб расположена на оптической оси приемного канала по ходу контрольного пучка лазерного излучения между первым зеркалом и зеркально-линзовым объективом приемного телескопа, уголковое зеркало компенсатора поворота изображения снабжено приводом вращения, управляемым блоком управления вращением уголкового зеркала компенсатора поворота изображения, связанным с центральным блоком управления, и датчиком углового положения уголкового зеркала компенсатора поворота изображения, выход которого связан со входом блока управления вращением уголкового зеркала компенсатора поворота изображения, фотоприемное устройство выполнено комбинированным и содержит фоточувствительные элементы приема теплового излучения объектов, лазерного излучения зондирующего пучка, отраженного от объектов, и лазерного излучения контрольного пучка, вход теплопеленгатора связан с третьим выходом фотоприемного устройства, а выход с блоком формирования изображения контролируемой зоны, выделения и сопровождения объектов, связанным в свою очередь с центральным блоком управления, первый вход датчика отклонения оптической оси контрольного пучка лазерного излучения связан со вторым выходом фотоприемного устройства, второй вход датчика отклонения оптической оси контрольного пучка лазерного излучения связан с выходом генератора-синхронизатора, а выход датчика отклонения оптической оси контрольного пучка лазерного излучения связан со входом блока вычисления направления оптической оси передающего канала, связанного в свою очередь с центральным блоком управления, выход генератора-синхронизатора связан с блоком накачки пилотного лазера, выход опорно-контрольного фотоприемника связан со входом блока обработки сигналов и выдачи данных по местоположению объектов, выполненным с возможностью определения местоположения и скоростей движущихся объектов по принятым от объектов сигналам и связанным, в свою очередь, с центральным блоком управления, вход устройства отображения текущей информации связан с выходом центрального блока управления, оптический выход пилотного лазера через второй светоделитель оптически сопряжен с оптическим входом опорно-контрольного фотоприемника, а через последовательно расположенные второй и первый светоделители оптически сопряжен с оптическим выходом частотно-импульсного лазера, оптический выход частотно-импульсного лазера через первый и второй светоделители оптически сопряжен с оптическим входом опорно-контрольного фотоприемника, а через первый светоделитель оптически сопряжен с оптическим входом формирующего телескопа, оптический выход формирующего телескопа оптически сопряжен с призмой Дове и далее с оптическим входом устройства, отклоняющего пучок лазерного излучения, которое расположено на оптической оси передающего канала в нулевом положении так, что отклоняет падающие на него зондирующий и контрольный пучки лазерного излучения, распространяющиеся горизонтально вдоль оптической оси передающего канала, на угол 90°, оптический выход устройства, отклоняющего пучок лазерного излучения, оптически сопряжен с оптическим входом выходного телескопа, оптический выход которого последовательно оптически сопряжен по ходу распространения зондирующего пучка лазерного излучения с первой отражательной поверхностью первого зеркала и отражательной поверхностью второго зеркала, оптический выход выходного телескопа также последовательно оптически сопряжен по ходу распространения контрольного пучка лазерного излучения с прямоугольной призмой с усеченной вершиной на первой отражательной поверхности первого зеркала, прямоугольной отражательной призмой на отражательной поверхности второго зеркала, полупрозрачными частями первой и второй поверхностей первого зеркала, прямоугольной отражательной призмой на отражательной поверхности третьего зеркала, полупрозрачной частью второй поверхности первого зеркала, призмой-ромбом, зеркально-линзовым объективом приемного телескопа, уголковым зеркалом компенсатора поворота изображения, оптическим входом фотоприемного устройства, на оптической оси приемного канала последовательно расположены оптически сопряженные третье и первое отражательные зеркала, зеркально-линзовый объектив приемного телескопа, уголковое зеркало компенсатора поворота изображения, оптический вход фотоприемного устройства, при этом третье и первое отражательные зеркала установлены так, что оптически сопряжены отражательная поверхность третьего зеркала и вторая отражательная поверхность первого зеркала, плоскости зеркал в нулевом положении перпендикулярны друг другу и расположены под углом 45° к вертикальной оси.
Если в многофункциональной оптико-локационной системе по п.1, формирующий телескоп дополнительно содержит блок сменных формирующих телескопов с различным увеличением, снабженный устройством переключения сменных формирующих телескопов, связанным с выходом центрального блока управления, то возникает дополнительный технический результат, заключающийся в повышении точности и мобильности работы системы. Сменные формирующие телескопы обладают различным увеличением и при смене телескопов, осуществляемой устройством переключения сменных формирующих телескопов по командам от центрального блока управления, ширина диаграммы направленности зондирующего пучка лазерного излучения, проходящего через формирующий телескоп, соответственно и плотность мощности зондирующего пучка, могут оперативно изменяться в процессе работы оптико-локационной системы в зависимости от дальности до объекта.
Совокупность перечисленных выше существенных признаков изобретения связана с техническим результатом причинно-следственной связью.
В основе технического решения построения заявляемой оптико-локационной системы лежит конструктивное совмещение оптической, механической и оптико-электронной частей разных функциональных узлов системы, которое позволяет функционально совместить в одном приборе теплопеленгатор, способный работать как в режиме кругового обзора со спиральной разверткой контролируемой зоны, так и в режиме секторного обзора с радиальной разверткой наблюдаемого сектора пространства, встроенный в эту же систему лазерный локатор, имеющий общий с теплопеленгатором оптический приемный канал, встроенное в эту же систему устройство автоюстировки, единое комбинированное фотоприемное устройство для регистрации теплового и отраженного от объектов лазерного излучения, имеющее фоточувствительные элементы, оптимизированные под выбранные спектральные диапазоны, общие элементы узлов наведения излучения в приемном и передающем каналах.
Оригинальное совмещение и встраивание друг в друга узлов системы приводит к существенному снижению ее весогабаритных характеристик. Основные оптико-механические узлы системы снабжены блоками управления имеют программно-управляемые приводы и датчики текущего состояния. Это в совокупности с техническими возможностями основных узлов позволяет программно перестраивать функции исполнения оптико-локационной системой различных задач, таких как:
- циклический круговой обзор, поиск и обнаружение объектов в пассивном режиме по радиационному контрасту;
- допоиск выделенных объектов по отраженному лазерному излучению непосредственно в процессе их пассивного поиска;
- циклическое сопровождение выделенных объектов с построением оптимальной траектории сканирования;
- определение местоположения и скоростей движущихся объектов;
- захват и точное сопровождение движущихся объектов, при котором оптическая ось системы совмещается с направлением на объект.
Заявляемое техническое решение построения оптико-локационной системы, изложенное в формуле изобретения, позволяет создать многофункциональную, способную функционировать в отсутствие внешних данных целеуказания, имеющую малые весогабаритные характеристики оптико-локационную систему. Наличие устройства автоюстировки оптических осей приемного и передающего каналов, осуществляемой в динамическом режиме, обеспечивает стабильность работы системы и повышение точности измерений. Заявляемая оптико-локационная система является новой и расширяет арсенал имеющихся оптико-электронных приборов, решающих аналогичные задачи. При этом совокупное действие всех признаков изобретения приводит к достижению технического результата.
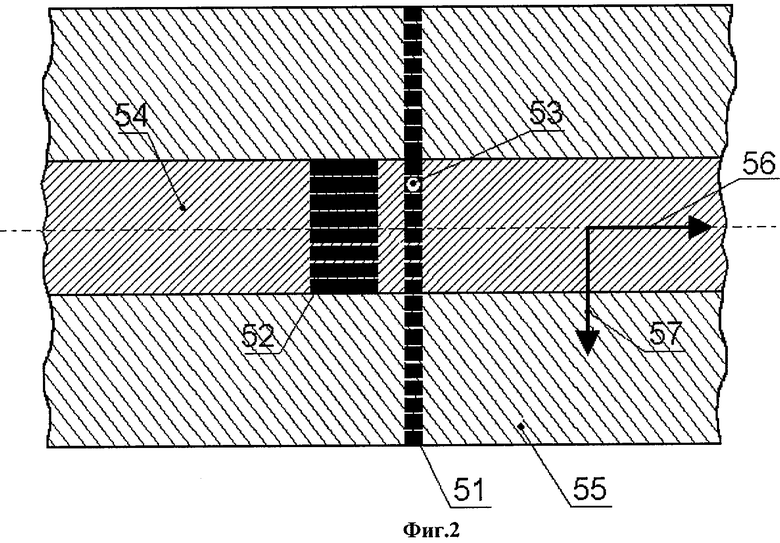
На фиг.1 представлена структурная схема многофункциональной оптико-локационной системы, где 1 - комбинированное фотоприемное устройство, 2 - зеркально-линзовый объектив приемного телескопа, 3 - встроенное в приемный телескоп уголковое зеркало компенсатора поворота изображения, 4 - привод уголкового зеркала компенсатора поворота изображения, 5 - датчик углового положения уголкового зеркала компенсатора поворота изображения, 6 - призма-ромб, 6′ - круглая диафрагма, установленная на выходной грани призмы-ромба 6, 7 - первое зеркало, 8 - второе зеркало, 8′ - третье зеркало, 9 - горизонтальная платформа, 9′ - стойка, на которой закреплен центр второго зеркала, установленная на горизонтальной платформе 9, 9′′ - стойка, на которой закреплен центр третьего зеркала, установленная на горизонтальной платформе 9, 10 - система шкивов, посредством которой второе зеркало связано со вторым валом вращения, 10′ - система шкивов, посредством которой третье зеркало связано со вторым валом вращения, 11 - первый вал вращения, 12 - промежуточный вал вращения, 13 - второй вал вращения, 14 - датчик углового положения первого вала вращения, 15 - датчик углового положения промежуточного вала вращения, 16 - датчик углового положения второго вала вращения, 17 - привод первого вала вращения, 18 - привод промежуточного вала вращения, 19 - привод второго вала вращения, 20 - блок управления вращением первого вала вращения, 21 - блок управления вращением промежуточного вала вращения, 22 - блок управления вращением второго вала вращения, 23 - отражательное зеркало, отклоняющее пучок лазерного излучения, 24 - двухкоординатный датчик положения отражательного зеркала, отклоняющего пучок лазерного излучения, 25 - блок управления устройством (отражательным зеркалом), отклоняющим пучок лазерного излучения, 26 - призма Дове, 27 - датчик углового положения призмы Дове, 28 - привод вращения призмы Дове, 29 - блок управления вращением призмы Дове, 30 - формирующий телескоп, 30′ - блок сменных формирующих телескопов, 31 - устройство переключения сменных формирующих телескопов, 32 - зондирующий частотно-импульсный лазер, 33 - блок накачки зондирующего лазера, 34 - пилотный лазер, 35 - блок накачки пилотного лазера, 36 - генератор-синхронизатор, 37 - опорно-контрольный фотоприемник, 38 - аналого-цифровой преобразователь сигналов, 39 - датчик отклонения оптической оси контрольного пучка лазерного излучения, 40 - теплопеленгатор, 41 - блок обработки сигналов и выдачи данных по местоположению объектов, 42 - блок вычисления направления оптической оси передающего канала, 43 - блок формирования изображения контролируемой зоны, выделения и сопровождения объектов, 44 - центральный блок управления, 45 - устройство отображения текущей информации, 46 - блок управления вращением уголкового зеркала компенсатора поворота изображения, 47 - первый светоделитель, 48 - второй светоделитель, 49 - выходной телескоп, 50 - командно-информационная шина. На фиг.1 полутонами выделены в порядке уменьшения яркости сечения контрольного пучка лазерного излучения, зондирующего пучка лазерного излучения, распространяющегося в передающем канале и пучка теплового излучения, распространяющегося в приемном канале (сечение зондирующего пучка лазерного излучения, отраженного от объектов, распространяющегося в приемном канале, отдельно не выделено, оно расположено внутри сечения пучка теплового излучения).
На фиг.2 представлена схема режима спирального сканирования контролируемой зоны, где 51 - мгновенное поле зрения теплопеленгатора, 52 - мгновенное поле зрения лазерного локатора, формируемого узлами оптико-локационной системы, 53 - предполагаемый объект (выделенная радиационная неоднородность), 54 - полоса пространства, просматриваемая линейкой приема лазерного излучения зондирующего пучка, отраженного от объектов, 55 - полоса пространства, просматриваемая линейкой приема теплового излучения объектов, 56 - направление сканирования по азимуту, 57 - направление сканирования по углу места.
Рабочие длины волн лазеров, спектральной чувствительности фотоприемных устройств, отражательных зеркал и оптических компонентов системы согласованы и лежат в одном спектральном диапазоне.
Нулевое положение оптико-локационной системы характеризуется начальным состоянием покоя всех ее кинематических узлов. Центральный блок управления выполнен с возможностью ориентации оптико-локационной системы в пространстве, в нем предусмотрено получение информации о пространственных координатах оптико-локационной системы и точном времени от встроенной платы топопривязки, работающей в стандарте JPS.
Многофункциональная оптико-локационная система работает следующим образом.
По команде от центрального блока управления осуществляется циклическое сканирование верхней полусферы пространства с помощью первого и третьего отражательных зеркал.
Для этого по командам от центрального блока управления (ЦБУ) 44, транслируемым по командно-информационной шине 50 в блоки управления (БУ) 20, 21, 22, 29, 46, приводятся в действие соответственно привод первого вала вращения 17, привод промежуточного вала вращения 18, привод второго вала вращения 19, привод уголкового зеркала компенсатора поворота изображения 4 и привод призмы Дове 28. В режиме поиска объектов функциональная связь траекторий приводов описывается следующим образом.
Привод первого вала вращения 17 приводит в равномерное вращение первый вал 11 и связанные с ним выходной телескоп 49 и горизонтальную платформу 9 с закрепленными на ней первым зеркалом 7, вторым зеркалом 8 и третьим зеркалом 8′. Вращение первого вала, обеспечивающего сканирование оптико-локационной системой пространства по азимуту, осуществляется относительно промежуточного вала 12, имеющего собственный привод 18, снабженный датчиком углового положения промежуточного вала вращения 15 и блоком управления вращением промежуточного вала вращения 21.
Траекторное задание для привода промежуточного вала вращения 18 повторяет траекторное задание для привода вращения первого вала вращения 22 со сдвигом по величине скорости на постоянную величину. Это стабилизирует моменты трения между валами, обеспечивает управляемость приводов первого и второго валов вращения во всем диапазоне скоростей, включая диапазон околонулевых скоростей.
Вращение второго вала 13 обеспечивает сканирование локационной системой пространства по углу места. Траекторное задание для привода второго вала вращения может изменять вектор угловой скорости вращения второго вала так, что он может отличаться от вектора угловой скорости вращения первого вала как по величине, так и по направлению. Вектор угловой скорости синхронного вращения второго и третьего зеркал относительно горизонтальной оси определяется разностью векторов угловых скоростей вращения первого и второго валов вращения. Центры второго и третьего зеркал, расположенные на горизонтальной оси, закреплены на стойках 9′ и 9′′, установленных на горизонтальной платформе, через системы шкивов 10 и 10′ зеркала 8 и 8′ связаны со вторым валом вращения. Таким образом, при постоянной разности векторов скоростей первого и второго валов вращения формируется спиральная развертка контролируемой зоны в заданном секторе. Возврат в исходную точку начала сканирования осуществляется изменением знака разности векторов скоростей вращения первого и второго валов вращения.
Так как зондирующий лазер 32 и комбинированное фотоприемное устройство 1 смонтированы на неподвижном основании, для компенсации поворота изображения объектов в фокальной плоскости фотоприемного устройства, обусловленного вращением первого, второго и третьего зеркал, в оптическую систему приемного объектива 2 встроено уголковое зеркало компенсатора поворота изображения 3, а в передающий канал введена вращающаяся вокруг оптической оси передающего канала призма Дове 26 (призма установлена так, что оптическая ось передающего канала параллельна плоскости основания призмы и совпадает с визирной осью призмы). Траекторные задания для привода 4 уголкового зеркала компенсатора поворота изображения и привода 28 вращения призмы Дове таковы, что векторы скоростей этих приводов равны взятой с обратным знаком полусумме векторов скоростей вращения первого и второго валов вращения.
В процессе сканирования контролируемой зоны тепловое излучение объектов через зеркала 8′ и 7 поступает на оптический вход зеркально-линзового объектива 2, уголкового зеркала компенсатора поворота изображения 3 и далее на оптический вход комбинированного фотоприемного устройства 1, на общей подложке которого смонтированы фоточувствительные элементы приема теплового излучения объектов, лазерного излучения контрольного пучка и лазерного излучения зондирующего пучка, отраженного от объектов. Фоточувствительные элементы приема теплового излучения представляют собой фоточувствительные элементы теплопеленгатора и в дальнейшем будут так и именоваться, а фоточувствительные элементы приема лазерного излучения зондирующего пучка, отраженного от объектов, представляют собой фоточувствительные элементы лазерного локатора, по сути формируемого в совокупности узлами заявляемой оптико-локационной системы, и в дальнейшем также будут так и именоваться. Эти фоточувствительные элементы (ФЭ) закреплены в виде линеек, причем линейка ФЭ теплопеленгатора и линейка ФЭ лазерного локатора параллельны друг другу и расположены в фокальной плоскости фотоприемного устройства так, что их центры лежат на некотором расстоянии друг от друга на горизонтальной (координатной) оси, совпадающей с направлением сканирования по азимуту в режиме поиска, а сами линейки направлены перпендикулярно горизонтальной оси. В качестве ФЭ приема лазерного излучения контрольного пучка используется несколько фоточувствительных элементов линеек ФЭ теплопеленгатора и лазерного локатора, симметрично расположенных относительно центров этих линеек.
Кроме теплового излучения сканируемых фрагментов контролируемой зоны, на оптический вход зеркально-линзового объектива 2 поступает излучение контрольного пучка пилотного лазера 34, запускаемого по командам от ЦБУ одновременно с моментом начала работы оптико-локационной системы.
Для исключения влияния излучения пилотного лазера на работу каналов теплопеленгатора это излучение промодулировано с частотой выше полосы частот каналов теплопеленгатора.
Контрольный пучок лазерного излучения формируется следующим образом.
Выходное излучение пилотного лазера 34 через второй и первый светоделители вводится в резонатор зондирующего частотно-импульсного лазера 32. Излучение пилотного лазера может перестраиваться по длине волны в полосе частот генерации зондирующего лазера, обеспечивая последнему режим навязки частоты генерации зондирующего излучения, то есть зондирующий лазер 32 также может перестраиваться по длине волны. Отраженное от зеркал резонатора лазера 32 пилотное излучение контрольного пучка через формирующий телескоп 30, призму Дове 26, зеркало, отклоняющее пучок лазерного излучения 23, выходной телескоп 49 поступает на прямоугольную призму с усеченной вершиной, установленную в центре первого зеркала 7. Эта призма и прямоугольные призмы, установленные в центрах второго и третьего зеркал, достаточно малы по размеру и занимают лишь небольшую часть поверхности зеркал, на которых они установлены. После трехкратного отражения в призме с усеченной вершиной, установленной в центре первого зеркала 7, контрольный пучок последовательно поступает на отражательную грань прямоугольной призмы, установленную в центре второго отражательного зеркала 8, далее возвращается и проходит через прямоугольную призму с усеченной вершиной, установленную в центре первого зеркала, через полупрозрачные части на первой и второй (обратной) поверхностях первого зеркала, поступает на отражательную грань прямоугольной призмы, установленной в центре третьего отражательного зеркала 8′, возвращается ко второй поверхности первого зеркала и после отражения от полупрозрачной части на второй (обратной) поверхности первого зеркала 7 поступает на вход призмы-ромба 6, на выходе из которой диафрагмируется на диафрагме 6′, закрепленной на выходной грани призмы-ромба 6 (грани, через которую выходит из призмы пучок излучения), далее поступает на вход зеркально-линзового объектива 2, затем на уголковое зеркало компенсатора поворота изображения 3 и оптический вход фотоприемного устройства 1.
Излучение контрольного пучка регистрируется фоточувствительными элементами приема лазерного излучения контрольного пучка. Далее сигналы от фотоприемного устройства 1 поступают на вход датчика отклонения оптической оси контрольного пучка лазерного излучения 39. С датчиком отклонения оптической оси контрольного пучка лазерного излучения связан генератор-синхронизатор 36, выход которого связан с блоком накачки 35 пилотного лазера 34.
Распределение интенсивности контрольного пучка лазерного излучения в фокальной плоскости фотоприемного устройства соответствует Фраунгоферовой дифракции на круглой диафрагме малого размера, при этом положение центра распределения интенсивности определяется направлением пучка, падающего на диафрагму. Диаметр диафрагмы выбирается так, чтобы размер кружка Эйри в распределении интенсивности пучка был много больше величины измеряемого отклонения оси контрольного пучка. С помощью диафрагмы в поле зрения приемного объектива вводится лишь малая часть пучка из его центральной части.
В фокальной плоскости фотоприемного устройства при наличии ошибок в оптическом тракте передающего канала возникает смещение центра дифракционного пятна контрольного пучка относительно выбранного начала координат. Величина смещения определяется датчиком отклонения оптической оси контрольного пучка лазерного излучения 39, связанным с блоком вычисления направления оптической оси передающего канала 42, в котором определяется величина текущего углового рассогласования оптических осей передающего и приемного каналов. Полученная величина рассогласования или, другими словами, текущей ошибки транслируется в центральный блок управления 44, который корректирует на величину ошибки текущее задание по сдвигу оптической оси передающего канала и транслирует его в блок управления 25 отражательным зеркалом 23, отклоняющим пучок лазерного излучения. Блок управления 25 с учетом полученного задания формирует команды управления зеркалом 23, выполненным с возможностью вращения вокруг двух взаимно перпендикулярных осей, лежащих в плоскости отражательного зеркала. Быстродействующий двухкоординатный датчик положения 24 отражательного зеркала контролирует точность исполнения команд управления α′ и β′ и связан обратной связью с блоком управления 25.
Таким образом, в режиме спирального сканирования контролируемой зоны благодаря наличию контрольного пучка лазерного излучения осуществляется определение текущего углового рассогласования оптических осей передающего и приемного каналов и последующая коррекция оптической оси передающего канала, минимизирующая угловое рассогласование. Перечисленные выше узлы оптико-электронной системы, которые служат для формирования контрольного пучка лазерного излучения, определения его параметров и их последующей обработки, а также последующего формирования управляющих команд для других узлов системы, вместе составляют устройство автоюстировки.
В процессе поиска объектов выходные сигналы теплопеленгатора 40 поступают в блок формирования изображения контролируемой зоны, выделения и сопровождения объектов 43 синхронно с данными датчика углового положения первого вала вращения 14. Изображение контролируемой зоны в блоке 43 строится с учетом данных датчиков углового положения первого и второго валов вращения (соответственно, 14 и 16), а также показаний ε датчика углового положения уголкового зеркала компенсатора поворота изображения 5. Так как первый вал вращения обеспечивает сканирование оптико-локационной системой пространства по азимуту, а второй вал вращения - сканирование оптико-локационной системой пространства по углу места, то данные датчиков углового положения 14 и 16 несут информацию соответственно об азимутальном (θ) и угломестном (ϕ) положении вектора оптической оси приемного канала.
При обнаружении возможного объекта блок 43 транслирует его угловые координаты θоб и ϕоб в центральный блок управления 44, который формирует траекторию перехода привода 19 в состояние ϕпривода=ϕоб, и в момент совпадения координат вектора оптической оси приемного канала системы θ, ϕ с координатами объекта θоб, ϕоб формируется, с требуемым упреждением во времени, импульс запуска зондирующего лазера 32. Величина упреждения определяется угловым сдвигом диаграмм направленности теплопеленгатора и лазерного локатора, текущей скоростью сканирования системой пространства по азимуту и аппаратным временем задержки формирования зондирующего импульса лазерного излучения. Опорно-контрольный фотоприемник 37 фиксирует момент генерации зондирующего импульса лазерного излучения и транслирует в блок 41 сигнал начала отсчета дальности.
Сформированный зондирующий пучок лазерного излучения последовательно проходит формирующий телескоп 30, призму Дове 26 (вращение которой осуществляется по командам от ЦБУ) и направляется в расчетную точку местоположения возможного объекта отражательным зеркалом 23, отклоняющим пучок лазерного излучения, проходя через выходной телескоп 49 и отражаясь далее на первой отражательной поверхности первого зеркала 7 и отражательной поверхности второго зеркала 8.
При наличии реального объекта лазерное излучение зондирующего пучка, отраженного от объектов, регистрируется третьим зеркалом 8′ и, отражаясь далее на второй отражательной поверхности первого зеркала 7, направляется в зеркально-линзовый объектив 2, уголковое зеркало компенсатора поворота изображения 3, которые фокусируют излучение на ФЭ лазерного локатора, смонтированные с ФЭ теплопеленгатора на общей подложке комбинированного фотоприемного устройства 1. Схема режима спирального сканирования контролируемой зоны представлена на Фиг.2.
Далее продетектированные сигналы излучения поступают на вход аналого-цифрового преобразователя 38 и транслируются затем в блок обработки сигналов и выдачи данных по местоположению объектов 41, который вычисляет дальность до объекта, величину его эффективной отражающей поверхности, угловой скорости и уточняет координаты объекта. Полученные результаты обработки сигналов лазерного локатора транслируются в центральный блок управления 44 и отображаются на мониторе 45.
Блок 44, в зависимости от действующей программы, после активного допоиска местоположения возможного объекта может перейти в режим дальнейшего поиска объектов или в режим циклического, с частотой азимутального сканирования, сопровождения обнаруженного объекта. В режиме сопровождения привод 17 первого вала вращения, обеспечивающего сканирование оптико-локационной системой пространства по азимуту, продолжает равномерное вращение, а траекторные задания для привода 19 второго вала вращения формируются так, чтобы отслеживать объект по его угломестной координате. При совпадении угломестной и азимутальной координат вектора оптической оси с координатами цели осуществляется запуск зондирующего лазера с учетом требуемого упреждения во времени.
Из режима циклического сопровождения система может перейти в режим продолжения поиска объектов или в режим точного сопровождения объектов с высокой частотой обновления информации.
Переход в режим точного сопровождения осуществляется управляемым торможением привода первого вала вращения при траекторных заданиях для привода 19 второго вала вращения, формируемых так, чтобы сделать равными угловые векторы скоростей вращения второго вала и изменения угломестной координаты объекта ("удержание" угломестной координаты объекта). На последнем витке торможения ЦБУ 44 меняет траекторные задания приводам уголкового зеркала компенсатора поворота изображения 4 и призмы Дове 28, которые переходят в режим синхронного равномерного вращения.
При равенстве векторов угловых скоростей оптической оси приемного канала системы и объекта в окрестности его местоположения траекторные задания для привода уголкового зеркала компенсатора поворота изображения 4 формируются так, чтобы осуществить радиальную развертку изображения контролируемой зоны. В этом случае теплопеленгатор кругового обзора преобразуется в теплопеленгатор секторного обзора со "слепым" пятном в центре обзора. Зона "слепого пятна" является зоной активного поиска объектов зондирующим пучком лазерного излучения, диаграмма направленности которого сканирует "слепое" пятно по заданной траектории, формируемой блоком управления устройством 25, отклоняющим пучок лазерного излучения. При появлении сигнала от объекта на ФЭ лазерного локатора траектория поиска объекта лазерным лучом преобразуется в траекторию сопровождения объекта, при этом траекторные задания для приводов первого и второго валов вращения формируются так, чтобы совместить координаты вектора оптической оси приемного канала (центр "слепого" пятна) с угловыми координатами объекта.
При срыве активного сопровождения, то есть если объект находится вне "слепого" пятна, сигнал от объекта регистрируется теплопеленгатором секторного обзора. В этом случае траекторные задания для приводов первого и второго валов вращения формируются так, чтобы переместить центр "слепого" пятна и совместить координаты вектора оптической оси приемного канала с угловыми координатами объекта.
В случае окончания режима точного сопровождения объекта или при полной потере объекта оптико-локационная система может перейти в режим допоиска потерянного объекта в ближайших окрестностях, взять на точное сопровождение другой объект или вернуться в режим обзора контролируемой зоны.
Таким образом, заявляемая оптико-локационная система многофункциональна, способна вести поиск объектов в пассивном и активном режимах, осуществлять сопровождение многих объектов без наличия внешнего целеуказания, определять местоположение и скорости движущихся объектов с высокой точностью.
На предприятии ФГУП НИИКИ ОЭП был создан опытный образец, реализующий заявляемую многофункциональную оптико-локационную систему, успешно прошедший испытания и подтвердивший получение новых технических результатов. Изготовленный опытный образец имел невысокие весогабаритные характеристики и отличался высокой технологичностью и малой стоимостью изготовления аппаратуры. Наличие устройства автоюстировки позволило снизить требования к точности изготовления и жесткости конструктивных элементов оптико-механических узлов. Созданная система расширяет арсенал имеющихся в настоящее время оптико-электронных средств обнаружения движущихся объектов и определения их местоположения и скоростей.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2372628C1 |
| СПОСОБ И УСТРОЙСТВО АЗИМУТАЛЬНО-УГЛОМЕСТНОЙ ИНДИКАЦИИ В ОПТИКО-ЛОКАЦИОННЫХ СИСТЕМАХ | 2015 |
|
RU2628301C2 |
| АЭРОДРОМНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС МОНИТОРИНГА, УПРАВЛЕНИЯ И ДЕМОНСТРАЦИИ ПОЛЕТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2426074C1 |
| ЛАЗЕРНАЯ ГОЛОГРАФИЧЕСКАЯ ЛОКАЦИОННАЯ СИСТЕМА | 2022 |
|
RU2790960C1 |
| ТЕПЛОПЕЛЕНГАТОР | 2011 |
|
RU2458356C1 |
| Система автономного лазерного определения координат БВС без использования модулей GPS/ГЛОНАСС | 2019 |
|
RU2723692C1 |
| ЛАЗЕРНЫЙ ЛОКАТОР | 2014 |
|
RU2575766C1 |
| ЛАЗЕРНАЯ ЛОКАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2544305C1 |
| СПОСОБ ДОСТАВКИ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2541505C2 |
| ЛАЗЕРНАЯ ГОЛОГРАФИЧЕСКАЯ ПРИЕМНАЯ СИСТЕМА | 2022 |
|
RU2799499C1 |
Изобретение относится к лазерной локации. Техническим результатом изобретения является уменьшение весогабаритных характеристик и упрощение конструктивной реализации при обеспечении многофункциональности, повышение точности определения местоположения объектов, расширение арсенала оптико-электронных средств обнаружения движущихся объектов и определения их местоположения и скоростей. Оптико-локационная система включает в себя расположенные на оптической оси передающего канала оптически сопряженные лазерный передатчик, формирующий зондирующий пучок лазерного излучения, пилотный лазер, формирующий контрольный пучок лазерного излучения, светоделители, формирующий телескоп, призму Дове, устройство, отклоняющее пучок лазерного излучения, выходной телескоп, горизонтальную платформу с расположенными на ней первым и вторым зеркалами, выполненную с возможностью вращения вокруг вертикальной оси, три коаксиальных вала вращения, также расположенные на оптической оси приемного канала оптически сопряженные третье зеркало, обратная отражательная поверхность первого зеркала, зеркально-линзовый объектив приемного телескопа, уголковое зеркало, комбинированное фотоприемное устройство, при этом второе и третье зеркала выполнены с возможностью синхронного вращения вокруг горизонтальной оси, также устройство автоюстировки, включающее прямоугольную призму в центре первого зеркала, прямоугольные отражательные призмы в центрах второго и третьего зеркал, призму-ромб с диафрагмой, установленной на выходной грани призмы-ромба, а также блоки обработки сигналов, приводы, датчики текущего состояния и блоки управления основных оптико-механических узлов системы, центральный блок управления. 1 з.п. ф-лы, 2 ил.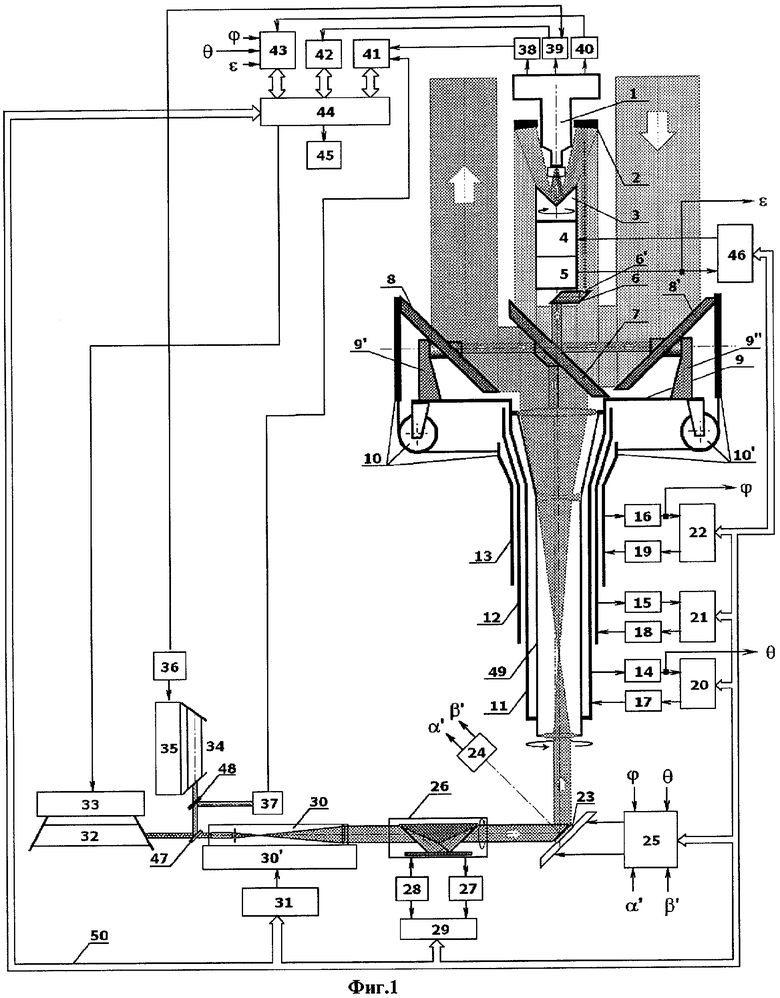
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2152056C1 |
| ДВУХКАНАЛЬНАЯ СИСТЕМА НАВЕДЕНИЯ | 1998 |
|
RU2138003C1 |
| US 4401886 А, 30.08.1983 | |||
| Цифровой фильтр | 1986 |
|
SU1348981A1 |
| ЭЛЕКТРИЧЕСКИЙ ВЫКЛЮЧАТЕЛЬ С ВЫДЕРЖКОЙ ВРЕМЕНИ | 1929 |
|
SU35101A1 |

