Перекрестная ссылка на родственные заявки
[0001] Данная заявка имеет приоритет обычной заявкой на патент США № 62/090,057, поданной 10 декабря 2014 г., которая включена в данный документ в своем полном объеме посредством ссылки.
Область техники, к которой относится изобретение
[0002] Предмет данного изобретения относится к устройствам и способам для запуска трубопроводных скребков. Более конкретно, раскрытый объект патентования относится к системе и способам для размещения множества скребков любого типа и запуска их по отдельности с использованием полностью автоматической, полуавтоматической или управляемой вручную системы запуска скребков, которая может быть горизонтально ориентированной.
Уровень техники
[0003] Системы очистки трубопроводов устанавливают на трубопроводных системах с целью введения трубопроводного скребка без прерывания потока в трубопроводе. Трубопроводные скребки обычно рассчитывают в соответствии с номинальным диаметром трубопровода и комплектуют из разных типов и материалов для выполнения функций очистки, удаления жидкости, просушки, дозированной закачки, химической обработки или проверки. Обычные системы очистки трубопроводов (называемые иногда камерами запуска и приемниками) используют в течение десятков лет для введения и извлечения трубопроводных скребков без прерывания потока продукта. В обычной системе очистки трубопровода камеру запуска устанавливают выше по потоку, а приемник устанавливают ниже по потоку от секции трубопровода, подлежащей очистке.
[0004] Фиг.1А показывает камеру 10 запуска скребков в соответствии с известным уровнем техники, а фиг.1В показывает приемник 20 скребков в соответствии с известным уровнем техники. Вкратце, камера 10 запуска содержит цилиндрическую секцию 11 увеличенного размера, соединенную посредством эксцентрического переходника 12 с номинальной линейной секцией 13. Торцевая крышка 14 на цилиндрической секции 11 обеспечивает доступ в ее внутреннюю часть для введения скребка (не показанного). Линейная секция 13 содержит фланец 16 для соединения с линейной трубой трубопроводной системы. Цилиндрическая секция 11 включает продувочный патрубок 18А, выпускной патрубок 18В и дренажный патрубок 18С. Линейная секция 13 включает сигнализатор 15 скребка и вентиляционное отверстие 17.
[0005] Приемник 20 устроен аналогичным образом и содержит номинальную линейную секцию 23, соединенную посредством концентрического переходника 22 с цилиндрической секцией 21 увеличенного размера. Торцевая крышка 26 на цилиндрической секции 21 обеспечивает доступ в ее внутреннюю часть для удаления скребков (не показанных). Линейная секция 23 содержит фланец 24 для соединения с линейной трубой трубопроводной системы. Цилиндрическая секция 21 включает продувочный патрубок 28А, байпасный патрубок 28В и дренажный патрубок 28С. Линейная секция 23 включает сигнализатор 25 скребка и вентиляционное отверстие 27.
[0006] Данные узлы 10, 20 изолированы от магистрали изолирующими клапанами (не показанными), чтобы позволять осуществлять сброс давления и отвод воды или воздуха из продукта, так что трубопроводный скребок можно вставлять или извлекать из трубопроводной системы при отсутствии давления или продукта в камере 10 запуска и приемнике 20. Управление такими обычными узлами 10, 20 системы очистки трубопровода, показанными на фиг.1А-1В, осуществляется вручную так, чтобы запускать и принимать один трубопроводный скребок во время каждой операции очистки трубопровода.
[0007] Другие системы очистки трубопроводов в данной области техники содержат автоматический узел запуска скребков, который может обеспечить повышенную пропускную способность трубопровода, экономию затрат и безопасность не требуя загрузки каждого скребка в отдельности. В настоящее время автоматические узла запуска скребков используют вертикальную или наклонную ориентацию конструкции, когда трубопроводные скребки под действием гравитации подаются в расположенный ниже по потоку механизм запуска. В частности, существующий механизм запуска содержит две оси, которые втягиваются посредством гидравлики или пневматики, позволяя осуществлять запуск трубопроводного скребка под действием гравитации. Кроме того, существующие автоматические узлы запуска скребков приспособлены для конкретного типа скребка и типа продукта.
[0008] Поскольку существующие автоматические системы очистки трубопроводов подаются посредством гравитации, данные системы при установке необходимо поднимать. Это требует, чтобы установка содержала платформу для обеспечения доступа к элементам системы и требует использования подъемного оборудования для работы узла. Кроме того, поскольку существующие автоматические системы очистки трубопроводов используют гидравлику или пневматику для приведения в действие механизма запуска, существующая система требует подачи газа для приведения в действие гидравлики, что усложняет установку и ее работу. Фактически контроллер для таких существующих автоматических систем очистки трубопроводов может быть сложным, затрудняя приведение их в действие и техническое обслуживание.
[0009] Предмет настоящего изобретения направлен на устранение, или по меньшей мере уменьшение влияния, одной или более из вышеупомянутых проблем.
Сущность изобретения
[0010] Способ и система размещает множество скребков и запускает каждый скребок в отдельности в полностью автоматическом, полуавтоматическом или ручном режиме. Упомянутая система содержит камеру запуска, ориентированную в горизонтальном положении с проточным цилиндром и механизмом запуска. Вообще механизм запуска может быть приведен в действие посредством программируемого логического контроллера, управляемого пользователем переключателя или ручной операции.
[0011] В одном варианте осуществления, механизм запуска может использовать винтовую систему подающего винта с зубчатым зацеплением, которая перемещает лопатку вдоль внутренней длины цилиндра запуска увеличенного размера, чтобы продвигать скребки, размещенные в упомянутом цилиндре. Размещенные скребки входят в контакт с упомянутой лопаткой механизма запуска подающего винта с зубчатым зацеплением, и один из трубопроводных скребков задвигается в переходник между упомянутым цилиндром увеличенного диаметра и секцией трубопровода камеры запуска. Разность давлений создается, когда скребок уплотняет по меньшей мере частично в области переходника камеры запуска, расположенного ниже по потоку от проточного сопла. При этом технологический поток позади продвинутого скребка позволяет осуществлять запуск скребка в расположенный ниже по потоку трубопровод. Зубчатые колеса на приводном механизме могут приводиться в движение вручную, по требованию или могут быть запрограммированы с использованием независимого контроллера, который позволяет осуществлять запуски скребков в конкретное время или с временным интервалом.
[0012] Упомянутая камера запуска не требует гравитации для подачи скребков. Таким образом, камера запуска может быть расположена горизонтально на месте. Это имеет преимущества в том, что устраняется необходимость в поднятой платформе и соответствующих конструкциях, подъемном оборудовании и т.п. Кроме того, горизонтальное расположение уменьшает затраты и сложность вспомогательной трубопроводной обвязки.
[0013] Вообще механизм запуска включает в себя направляющую и привод. Упомянутый механизм может использовать двигатель, подающий винт, трос, цилиндр или другой приводной элемент, используемый вместе с лопаткой, салазками, поддоном или т.п. Скребки могут быть также размещены для запуска с использованием механизма типа конвейерной ленты.
[0014] В упомянутой системе, упомянутая камера запуска содержит фланец для соединения с трубопроводом, через который нормально протекает технологический поток. Скребки размещают для запуска с использованием управляемой подачи механизма запуска, который является независимым от конкретного скребка. Запуск и последовательность операций не зависят от размеров конкретного скребка и могут быть запрограммированы, таким образом позволяя использовать скребки разного назначения, размеров и изготовления. В одной и той же группе могут быть загружены скребки разного назначения и разного физического размера/формы. И наконец, проточное соединение трубопровода на камере запуска устраняет необходимость с приведении в движение трубопроводных клапанов. Это уменьшает стоимость и сложность узла.
[0015] Во время работы, технологический поток первоначально отводят от камеры запуска, и любую остаточную текучую среду сливают из камеры запуска. Запорную дверь камеры запуска открывают, чтобы обеспечить доступ в камеру запуска. Группу скребков загружают в камеру запуска, которую затем закрывают и заполняют технологическим потоком.
[0016] В контроллер вводят информацию о скребке и требования к запуску, и поток перенаправляют через камеру запуска. В запрограммированный момент времени скребок подают в технологический поток посредством механизма запуска и запускают. Скребок перемещается по трубопроводу, выполняет поставленную перед ним задачу и в конце концов входит в приемник. В запрограммированный момент времени следующий скребок в последовательности задвигают в технологический поток и запускают так, чтобы перемещать по трубопроводу и затем вводить приемник. Упомянутая последовательность может повторяться до тех пор, пока не будет запущена и принята вся группа скребков. Обычный размер группы может составлять примерно семь скребков.
[0017] Вышеприведенное краткое описание не имеет целью изложить каждый возможный вариант осуществления или каждый аспект настоящего изобретения
В формуле заявлено устройство для запуска одного или более скребков в технологический поток, содержащее:корпус, образующий камеру с первой длиной и содержащий вход и выход, причем вход принимает один или более скребков в камеру, причем выход сообщается с технологическим потоком и выпускает один или более скребков из камеры в технологический поток, при этом часть камеры сообщается с технологическим потоком; направляющую, расположенную в камере и направляющую один или более скребков в камере, поверхность направляющей, перемещаемая вдоль первой длины камеры от входа к выходу; и привод функционально соединенный с поверхностью направляющей и, механически подающий один или более скребков, направляемых посредством направляющей вдоль первой длины камеры к выходу.
Предпочтительно поверхность упомянутой направляющей содержит лопатку, и при этом привод функционально соединен с упомянутой лопаткой.
Предпочтительно привод содержит двигатель, вращающий винт, проходящий вдоль первой длины камеры, причем лопатка соединена с винтом и выполнена с возможностью перемещения вдоль него при вращении винта.
Предпочтительно привод содержит двигатель, который перемещает ленту, проходящую вдоль первой длины камеры, причем лопатка соединена с лентой и перемещаема посредством перемещения ленты.
Предпочтительно привод содержит линейный исполнительный элемент, который проходит вдоль первой длины камеры, причем лопатка соединена с линейным исполнительным элементом и перемещаема посредством перемещения линейного исполнительного элемента.
Предпочтительно линейный исполнительный элемент содержит гидравлический поршень, пневматический цилиндр, или линейный двигатель.
Предпочтительно поверхность направляющей перемещаемая вдоль первой длины камеры содержит конвейерную ленту, имеющую одни или более скребков, расположенных на ней; и причем привод содержит двигатель перемещающий конвейерную ленту вдоль первой длины камеры.
Предпочтительно направляющая и привод содержат одно или более из двигателя, ленты, подающего винта, троса, цилиндра, рычага, рельса, реечного механизма, лопатки, салазок, поддона и конвейера.
Предпочтительно направляющая содержит поддон, установленный в камере и удерживающий на себе один или более скребков.
Предпочтительно поддон представляет собой канал, содержащий основание и боковые стенки.
Предпочтительно по меньшей мере часть поддона выполнена с возможностью регулирования для размещения разных размеров упомянутого одного или более скребков.
Предпочтительно устройство дополнительно содержащее контроллер, функционально соединенный с приводом и управляющий механической подачей одного или более скребков к выходу.
Предпочтительно контроллер выполнен с возможностью программирования для управления механической подачей на основе одного или более из второй длины одного или более скребков, количества одного или более скребков, графика для запуска первого из одного или более скребков, и интервала для последующего запуска следующего скребка из одного или более скребков.
Предпочтительно упомянутый корпус образует переходник между камерой и выходом, причем переходник эксцентрически переходит от большего внутреннего размера камеры к меньшему внутреннему размеру выхода.
Предпочтительно выход содержит фланец, соединяющийся с трубопроводом технологического потока.
Предпочтительно вход содержит крышку, выполненную с возможностью герметизации для открытия и закрытия доступа в упомянутую камеру.
Предпочтительно упомянутая часть камеры, сообщающаяся с технологическим потоком, содержит канал на корпусе в сообщении между технологическим потоком и участком камеры, расположенным выше по потоку от выхода, причем канал направляет часть технологического потока в камеру, расположенную выше по потоку от упомянутого выхода.
Предпочтительно устройство дополнительно содержит проточный клапан, соединенный с каналом и выполненный с возможностью пропускания части технологического потока из канала в выход.
Предпочтительно устройство дополнительно содержит магистральный клапан в сообщении между выходом и потоком, причем магистральный клапан является управляемым для направления упомянутого одного или более скребков и любой направляемой части технологического потока из камеры в технологический поток.
Предпочтительно устройство дополнительно содержит продувочный клапан в сообщении с камерой и являющийся управляемым для направления продувки в упомянутую камеру.
Предпочтительно устройство дополнительно содержит выпускной клапан в сообщении между технологическим потоком и камерой рядом с упомянутым входом, причем упомянутый выпускной клапан является управляемым для направления выброса технологического потока в упомянутую камеру.
Предпочтительно устройство дополнительно содержит дренажный клапан в сообщении с камерой и являющийся управляемым для отвода текучей среды из упомянутой камеры.
Предпочтительно выход содержит индикатор, регистрирующий прохождение одного или более скребков.
Предпочтительно поверхность направляющей перемещаема непрерывно вдоль первой длины камеры от входа к выходу; и причем привод функционально соединенный с поверхностью направляющей перемещает множество из одного или более скребка (Р) вместе вдоль первой длины камеры с поверхностью направляющей от входа к выходу и механически подает каждый из скребков последовательно от первого до последнего к выходу.
В формуле также заявлен способ запуска одного или более скребков в технологический поток, включающий:
герметизация одного или более скребков в камере с первой длиной;
направление одного или более скребков посредством направляющей в камере к выходу камеры, находящейся в сообщении с технологическим потоком;
механическую подачу одного или более скребков в камере к выходу посредством перемещения поверхности направляющей вдоль первой длины камеры от входа к выходу; и
запуск каждого из механически подаваемых скребков из выхода в технологический поток посредством направления части технологического потока в сообщении с камерой, расположенной выше по потоку от выхода.
Предпочтительно направление упомянутого одного или более скребков в камере включает продвижение упомянутого одного или более скребков посредством лопатки в качестве поверхности в упомянутой камере.
Предпочтительно механическая подача одного или более направляемых скребков в камере к выходу включает приведение в действие привода для перемещения лопатки в камере.
Предпочтительно приведение в действие привода для перемещения лопатки в камере включает приведение в действие двигателя и вращение винта, причем винт проходит вдоль первой длины камеры и функционально соединен с упомянутой лопаткой.
Предпочтительно приведение в действие привода для перемещения лопатки в камере включает приведение в действие двигателя и перемещения ленты, причем лента проходит вдоль первой длины камеры и функционально соединен с лопаткой.
Предпочтительно приведение в действие привода для перемещения лопатки в камере включает приведение в действие линейного исполнительного элемента, который проходит вдоль первой длины камеры, и перемещение лопатки функционально соединенной с линейным исполнительным элементом.
Предпочтительно линейный исполнительный элемент содержит гидравлический поршень, пневматический цилиндр, или линейный двигатель.
Предпочтительно механическая подача одного или более подаваемых скребков в камере к выходу посредством перемещения поверхности направляющей вдоль первой длины камеры включает управление двигателем и перемещение конвейерной ленты, проходящей вдоль первой длины камеры и имеющей один или более скребков, расположенных на её поверхности.
Предпочтительно направление одного или более скребков в камере включает удерживание одного или более скребков в поддоне, установленном в камере.
Предпочтительно механическая подача одного или более скребков в камере к выходу включает программное управление механической подачей на основе одного или более из второй длины одного или более скребков, количества одного или более скребков, графика для запуска первого из одного или более скребков, и интервала для последующего запуска следующего скребка из одного или более скребков.
Предпочтительно направление одного или более скребков в камере к выходу камеры, находящейся в сообщении с технологическим потоком, включает эксцентрический переход от большего внутреннего размера камеры к меньшему внутреннему размеру выхода.
Предпочтительно герметизация упомянутого одного или более скребков в камере включает закрытие доступа в камеру посредством крышки.
Предпочтительно направление части технологического потока в сообщении с камерой выше по потоку от выхода включает открытие проточного клапана в сообщении между технологическим потоком и частью камеры, расположенной выше по потоку от выхода.
Предпочтительно способ дополнительно включает открытие магистрального клапана в сообщении между выходом и технологическим потоком для направления одного или более скребков и любой направляемой части технологического потока из камеры в технологический поток.
Предпочтительно способ дополнительно включает регистрацию прохождения одного или более скребков на выходе.
Предпочтительно механическая подача и запуск содержат:
механическую подачу каждой из множества из одного или более скребков в камере последовательно от первого до последнего к выходу за счет перемещения поверхности направляющей непрерывно вдоль первой длины камеры от входа к выходу; и
запуск каждого последовательно поданного скребка из выхода в технологический поток посредством направления части технологического потока в сообщении с камерой, расположенной выше по потоку от выхода.
Краткое описание чертежей
[0018] Фиг.1 показывает камеру запуска скребков в соответствии с известным уровнем техники.
[0019] Фиг.1В показывает приемник скребков в соответствии с известным уровнем техники.
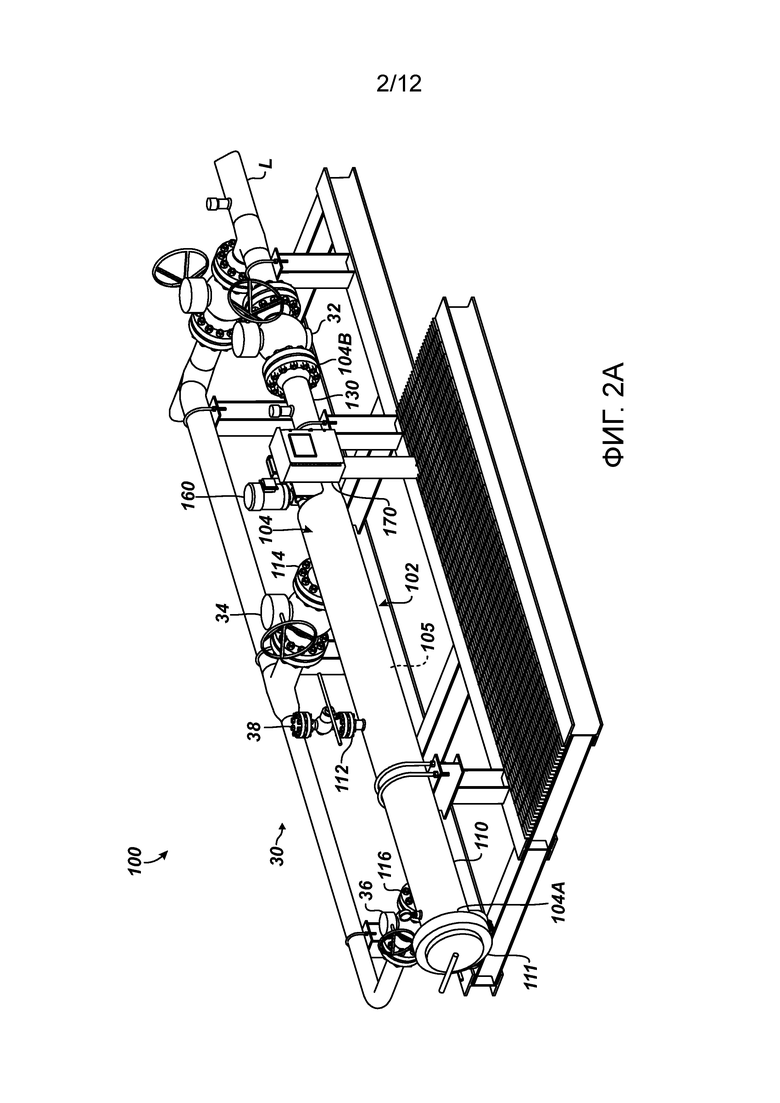
[0020] Фиг.2А показывает перспективный вид камеры запуска скребков в соответствии с настоящим изобретением с проточным и выпускным трубопроводом.
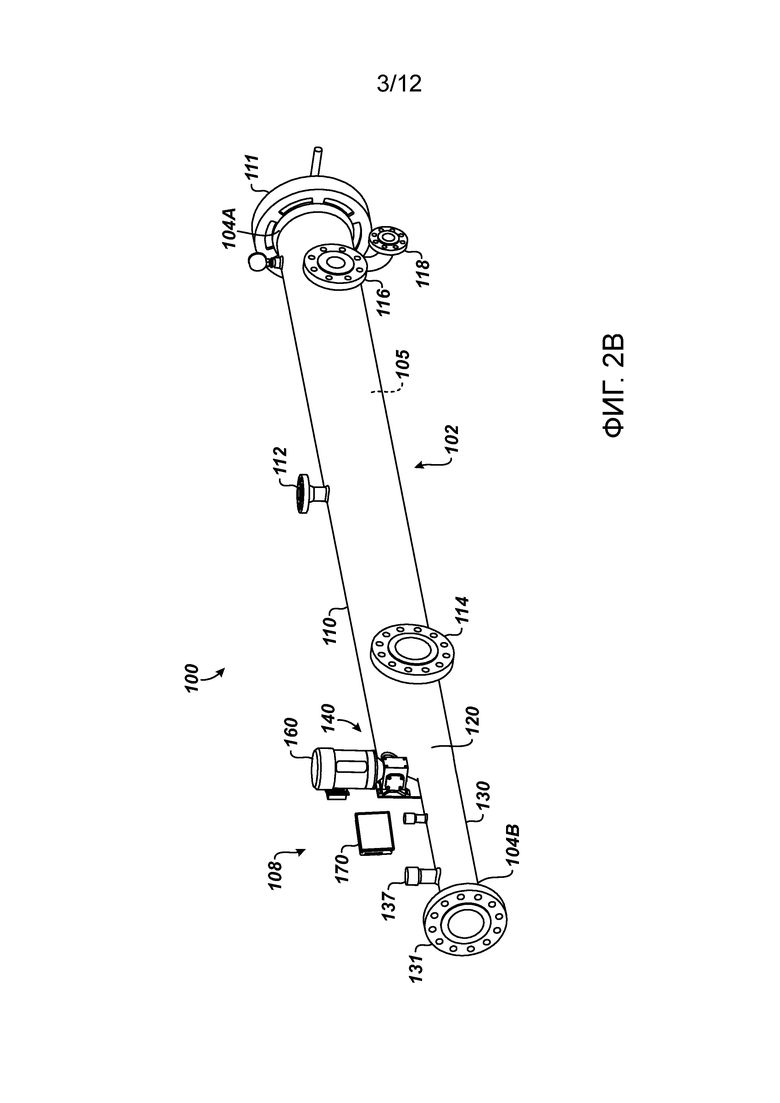
[0021] Фиг.2В показывает перспективный вид раскрытой камеры запуска скребков, изолированной от дополнительного трубопровода.
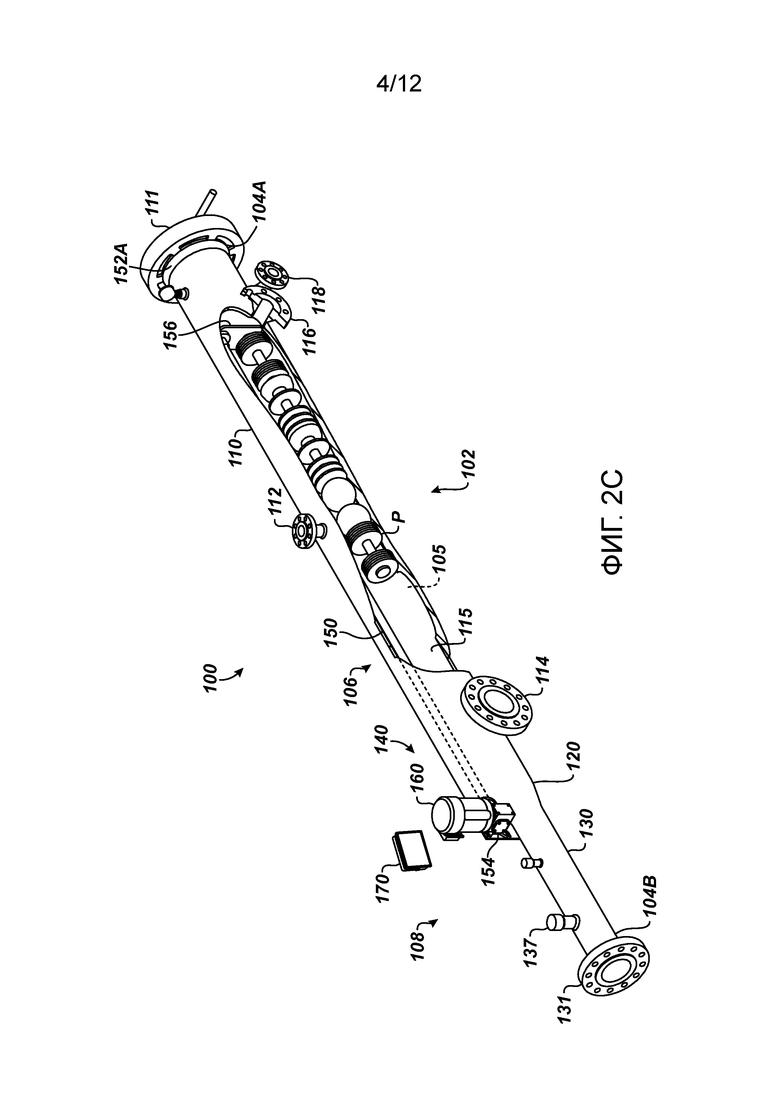
[0022] Фиг.2С показывает перспективный вид раскрытой камеры запуска скребков с разрезом, показывающим ее внутренние элементы.
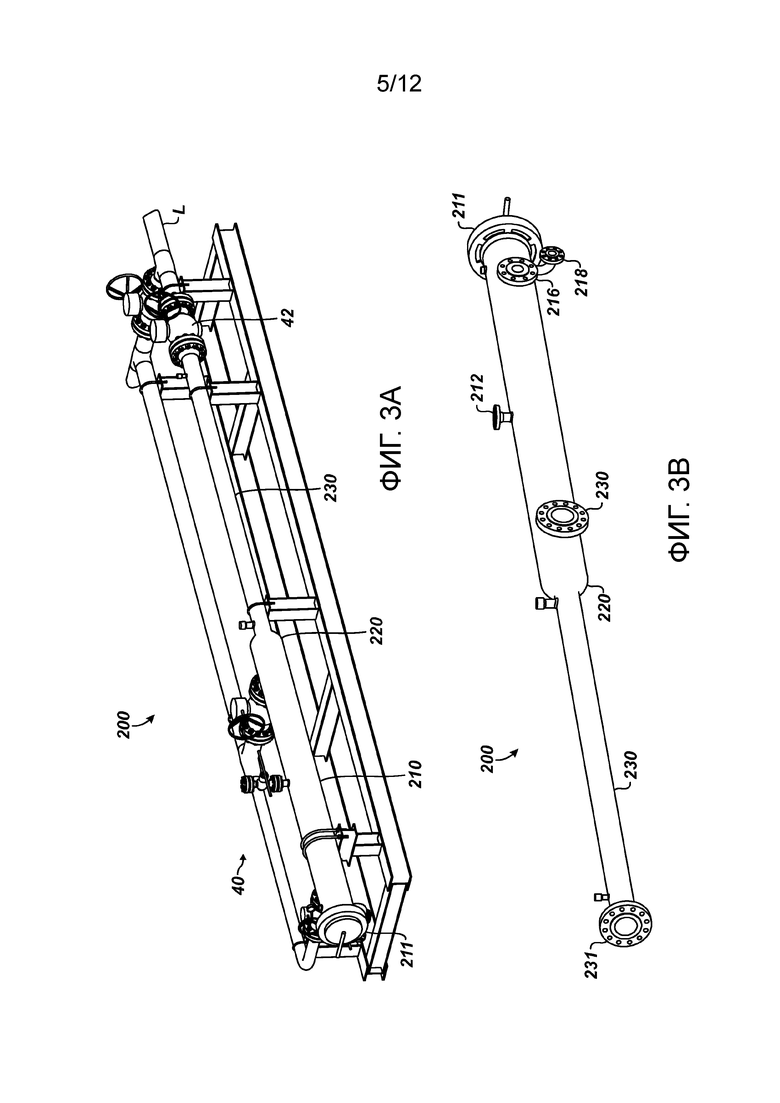
[0023] Фиг.3А показывает перспективный вид приемника скребков в соответствии с настоящим изобретением с проточным трубопроводом и трубопроводом для выхода потока.
[0024] Фиг.3В показывает перспективный вид раскрытой приемника скребков без дополнительного трубопровода.
[0025] Фиг.4А-4С показывают детали сопел, расположенных на раскрытой камере запуска скребков.
[0026] Фиг.5А-5D показывают варианты осуществления механизмов запуска для направления и механической подачи скребков в раскрытой камере запуска скребков.
[0027] Фиг.6А показывает коробку передач для раскрытой камеры подачи скребков.
[0028] Фиг.6В показывает подающий винт червячной передачи для раскрытой приемника скребков.
[0029] Фиг.6С показывает опорный подшипник для раскрытой камеры запуска скребков.
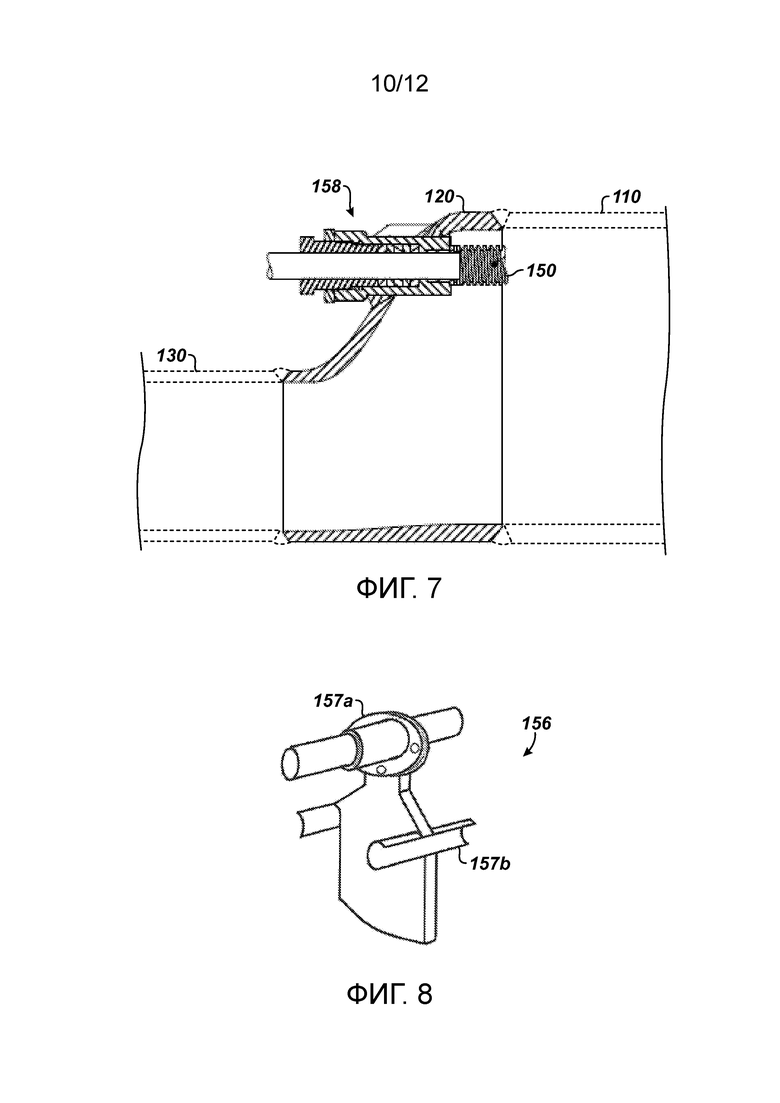
[0030] Фиг.7 показывает вид в разрезе уплотнения высокого давления для червячной передачи раскрытой камеры запуска скребков.
[0031] Фиг.8 показывает лопатку запуска для раскрытой камеры запуска скребков.
[0032] Фиг.9А-9В показывают перспективный вид и вид с торца поддона запуска для раскрытой камеры запуска скребков.
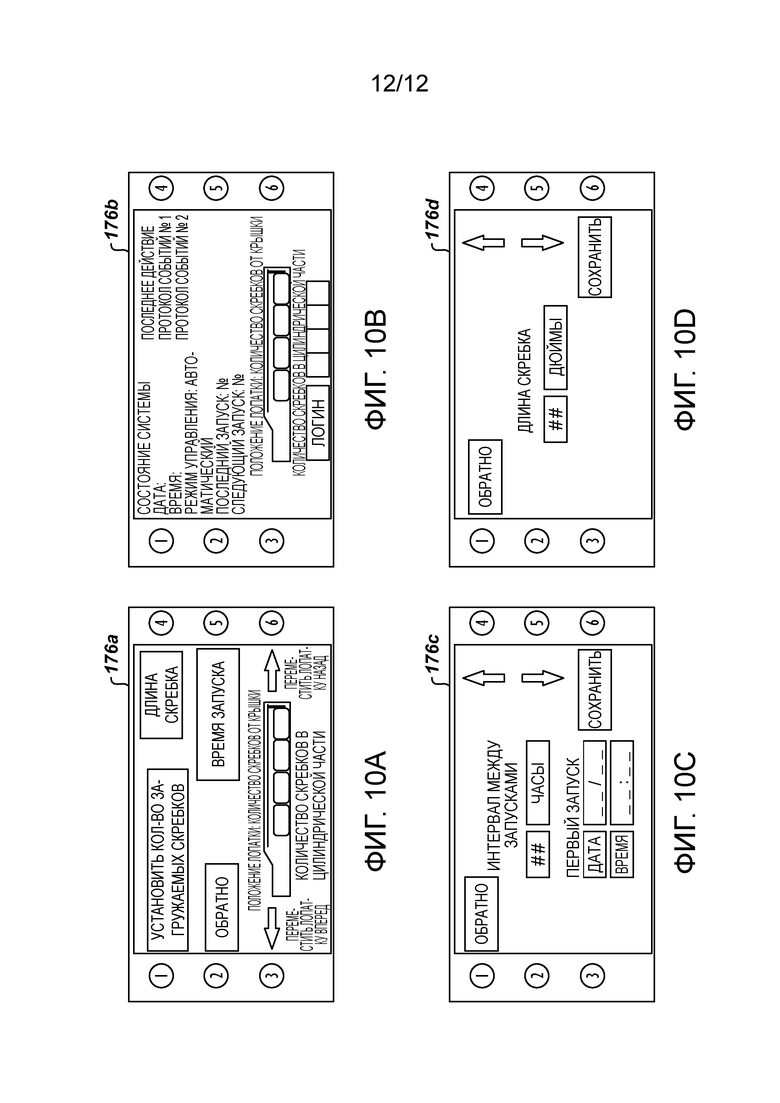
[0033] Фиг.10А-10В показывают примерные экраны интерфейса пользователя для контроллера раскрытой камеры запуска скребков.
Подробное описание изобретения
А. Система очистки трубопровода
[0034] Система очистки трубопровода настоящего изобретения включает камеру 100 запуска скребков (фиг.2А-2С) и приемник 200 скребков (фиг.3А-3В) для трубопровода. Как будет понятно, обычный трубопровод способен пропускать любой тип технологического потока, продукта или нетвердого материала, такого как газ, жидкость или коллоидная суспензия, который может транспортироваться по трубопроводу. Примеры продуктов, которые транспортируются через трубопровод, могут включать: природный газ, пропан, сырую нефть, воду и нефтяной конденсат.
[0035] На трубопроводе устанавливают камеру 100 запуска скребков, откуда скребки Р должны запускаться для осуществления поставленной перед ними задачи, связанной с очисткой трубопровода. Камеру 100 запуска обычно размещают в начале секции трубопровода, подлежащей очистке. На трубопроводе также устанавливают приемник 200 скребков, в который принимают скребки Р после осуществления поставленной перед ними задачи, связанной с очисткой трубопровода. Приемник 200 обычно размещают в конце секции трубопровода, подлежащей очистке.
[0036] Как известно, скребок Р представляет собой устройство, которое вводят в трубопровод для выполнения конкретной задачи. В разных вариантах осуществления, скребки Р могут быть использованы для выполнения задач, которые могут включать: очистку, удаление жидкости, просушку, порционную закачку, химическую обработку и проверку. Скребок может быть однонаправленным или двунаправленным.
[0037] На фиг.2А показана камера 100 запуска скребков с дополнительным трубопроводом 30, а на фиг.2В камера 100 запуска скребков показана отдельно и на фиг.2С показана с внутренними элементами. Камера 100 запуска скребков используется для размещения множества скребков Р и запуска их по отдельности в трубопровод (не показанный) через вводную трубу или линию L. Как будет описано ниже, камера 100 запуска скребков может функционировать в полностью автоматическом, полуавтоматическом или ручном режиме, как желательно для конкретной реализации.
[0038] Камера 100 запуска скребков включает корпус 102, образующий камеру 105 и содержащий вход 104А и выход 104В. Вход 104А принимает один или более скребков Р в камеру 105 и выполнен с возможностью уплотнения (герметизации), например, с использованием крышки 111, такой как дверь. Выход 104В соединяется в уплотненном сообщении с технологическим потоком в линии L трубопроводной системы 30. Выход 104В выпускает упомянутый один или более скребков Р из камеры 105 в технологический поток.
[0039] Как лучше всего показано на фиг.2С, внутри камеры 105 расположена направляющая 106, которая направляет упомянутый один или более скребков Р в камере 105. Кроме того, привод 108 механически подает упомянутый один или более скребков Р, направляемых посредством направляющей 106, к выходу 104В. Часть камеры 105 сообщается с технологическим потоком трубопроводной системы 30 через ряд патрубков и клапанов, описанных ниже.
[0040] На фиг.3А показан приемник 200 скребков с дополнительным трубопроводом 40 для пропускания потока и выхода потока, а на фиг.3В приемник 200 скребков показан отдельно. Приемник 200 скребков включает номинальную линейную трубную секцию 230, концентрический переходник 220 и цилиндрическую секцию 210 увеличенного размера. Цилиндрическая секция 210 приемника имеет увеличенную длину для размещения множества скребков, принимаемых из линии L, с которой приемник 200 соединен посредством изолирующего клапана 42.
[0041] Рассматривая далее более внимательно камеру 100 запуска скребков, показанную на фиг.2А-2С, корпус 102 содержит цилиндрическую секцию 110 увеличенного размера, эксцентрический переходник 120 и номинальную линейную секцию 130. Механизм 140 запуска, встроенный в корпус 102, включает направляющую 106 и привод 108.
[0042] Цилиндрическая секция 110 выполнена удлиненной для размещения множества скребков Р в ее внутренней камере 115. В время работы механизм 140 запуска запускает скребки Р по отдельности в технологический поток линии L, с которой камера 100 запуска соединена посредством изолирующего клапана 32 на выходе 104В камеры 100 запуска.
[0043] Камера 100 запуска скребков имеет горизонтально ориентированную конфигурацию, которая посредством фланцевого соединения 131 на выходе 104В соединяется с изолирующим клапаном 32. Цилиндрическая секция 110 имеет увеличенный диаметр, что позволяет потоку обходить скребки и ослабляет любую движущую силу. Например, диаметр цилиндрической секции 110 может быть в 2 раза больше диаметра номинальной трубной секции 130. Номинальная трубная секция 130 может быть выполнена так, что ее длина вдвое больше номинального диаметра трубы. Длина цилиндрической секции 110 может примерно в 14 раз больше диаметра трубы. Дистальный конец цилиндрической секции 110 либо содержит фланцевое соединение на входе 104А либо подготовлен с использованием сварочной фаски для установки быстрооткрывающейся крышки 111 или другого соединительного приспособления для обеспечения доступа для загрузки скребков Р в цилиндрическую секцию 110.
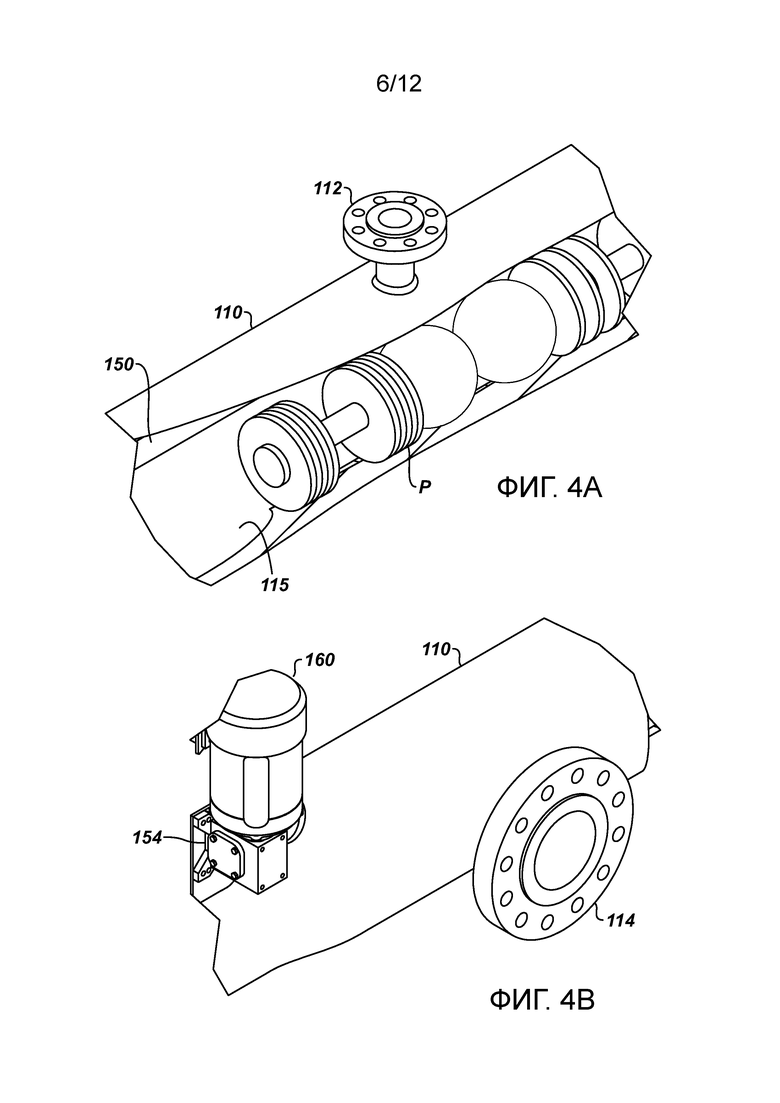
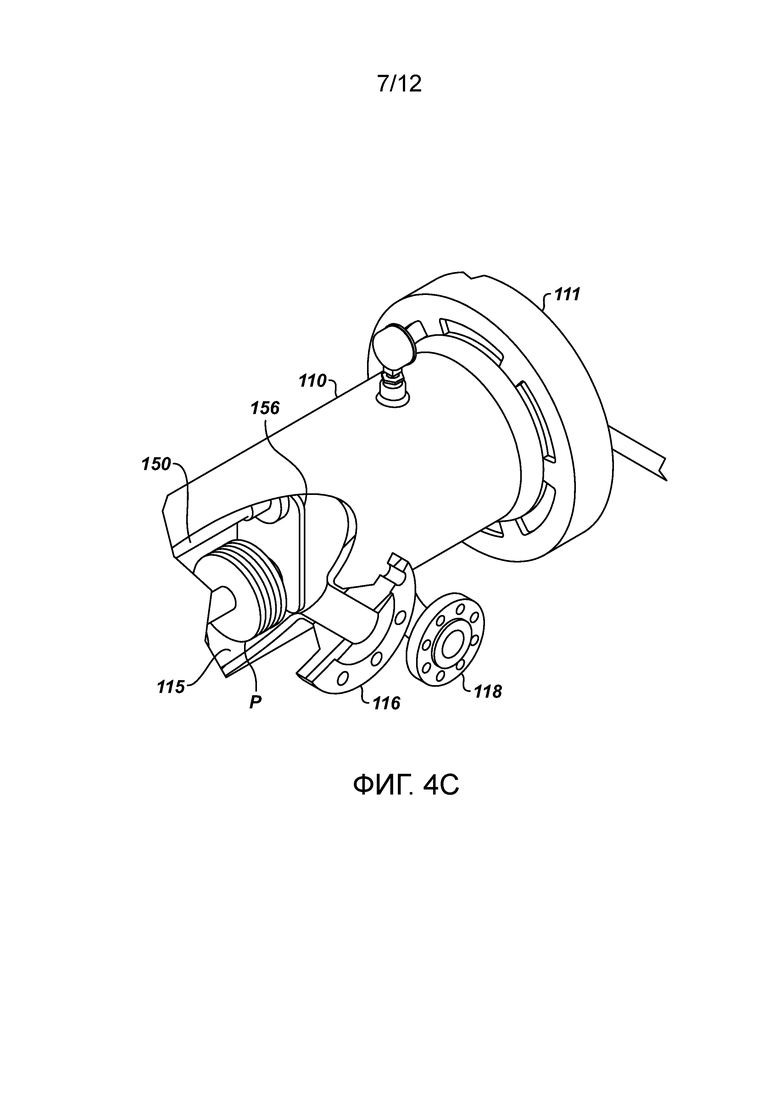
[0044] Как было упомянуто выше, часть камеры 105 сообщается с технологическим потоком трубопроводной системы 30 через ряд патрубков и клапанов. В частности, продувочный патрубок или канал 112 (показанный подробно на фиг.4А) расположен в верхней части корпуса 110 и сообщается с камерой 115 около входа 104А. Продувочный патрубок 112 используется для снижения давления в камере 115.
[0045] Проточный патрубок или канал 114 (показанный подробно на фиг.4В) расположен на цилиндрической секции 110 и ориентирован горизонтально, на расстоянии одного номинального диаметра трубы выше по потоку от дистального конца эксцентрического переходника 120. Участок корпуса 102, расположенный выше по потоку от проточного патрубка 114 до выхода 104В, образует проточную секцию, в которой непрерывно протекает технологический поток во время работы камеры запуска.
[0046] Наконец, выпускной патрубок или канал 116 и дренажный патрубок или канал 118 (оба показанные подробно на фиг.4С) сообщаются с камерой 115 около входа 104А. Выпускной патрубок 116 расположен в боковой части корпуса 110 и используется для обеспечения выброса технологического потока в камеру 115 при запуске специального скребка, который не запускается автоматически. Дренажный патрубок 118 выходит из нижней части корпуса 102 и используется для отвода текучей среды из камеры 115.
[0047] В данном варианте осуществления, взаимосвязанные элементы механизма 140 запуска включают подающий винт 150 червячной передачи, один или более подшипниковых узлов 152, лопатку 156 запуска, коробку 154 передач, двигатель 160 и контроллер 170. Некоторые детали подающего винта 150, лопаток 156 и др. показаны на фиг.2С. Детали механизма 140 запуска подробно описаны ниже.
[0048] В одном предпочтительном варианте осуществления, камера 100 запуска скребков ориентирована горизонтально, что устраняет необходимость в поднятых платформах, требующихся для введения скребков Р. Кроме того, цилиндрическая секция 110 увеличенного размера и трубная секция 130 камеры 100 запуска (а также приемника) выполнены удлиненными с целью запуска и приема множества скребков Р. В частности, трубчатая цилиндрическая секция 110 выполнена удлиненной для размещения ряда трубопроводных скребков Р, загруженных один за другим, чтобы осуществлять их введение в трубопроводную систему. Кроме того, раскрытый механизм 140 запуска может быть приспособлен для размещения разного количества скребков Р и не ограничен конкретным типом используемых скребков, интервалом запуска или продуктом в трубопроводе.
В. Механизмы запуска
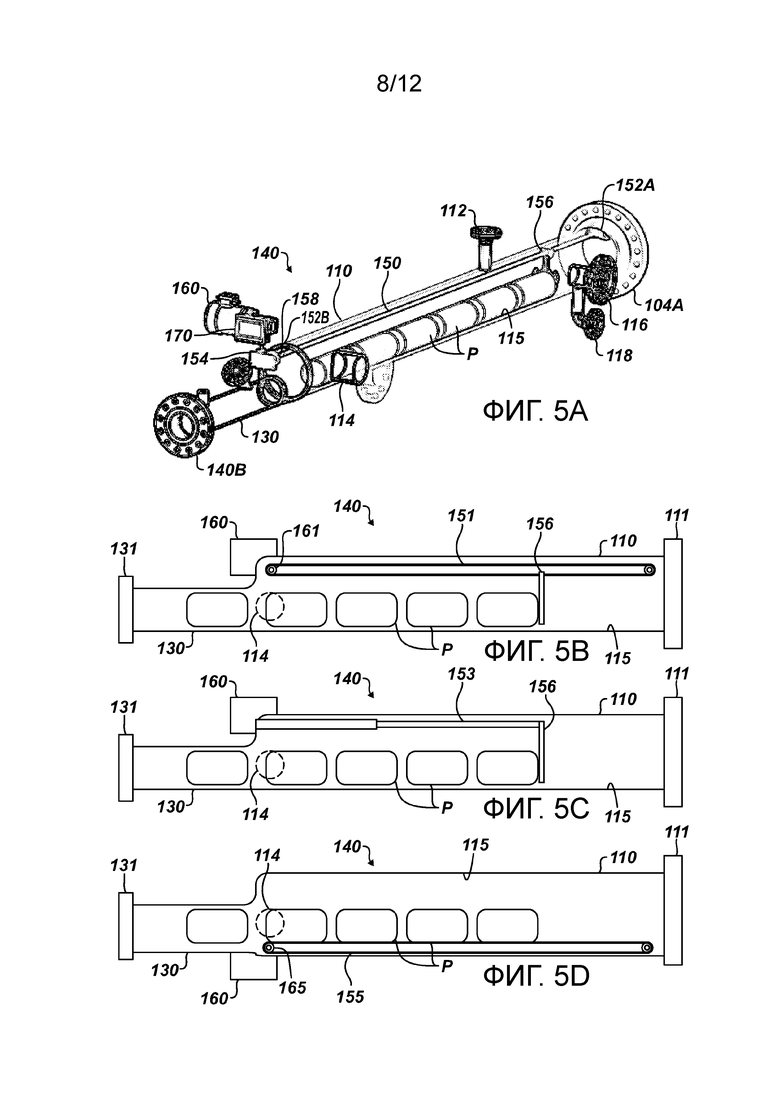
[0049] Механизм 140 запуска вводит (запускает) трубопроводные скребки Р по одному в линию L трубопроводной системы. Как было отмечено выше, механизм 140 запуска, показанный на фиг.2А-2С, включает подающий винт 150 червячной передачи, установленный внутри удлиненной цилиндрической секции 110. Это также более схематично показано в прозрачном виде камеры 100 запуска на фиг.5А.
[0050] Подающий винт 150 установлен в верхнем положении в цилиндрической секции 110 и проходит по всей длине удлиненной секции 110. Подающий винт 150 (пример которого показан на фиг.6В) может быть выполнен из нержавеющей стали. В дистальном конце относительно входа 104А цилиндрической секции 110, подающий винт 150 червячной передачи прикреплен к цилиндрической секции 110 посредством подшипникового узла 152А, который прикрепляет подающий винт 150 к внутренней стенке цилиндрической секции 110 увеличенного размера.
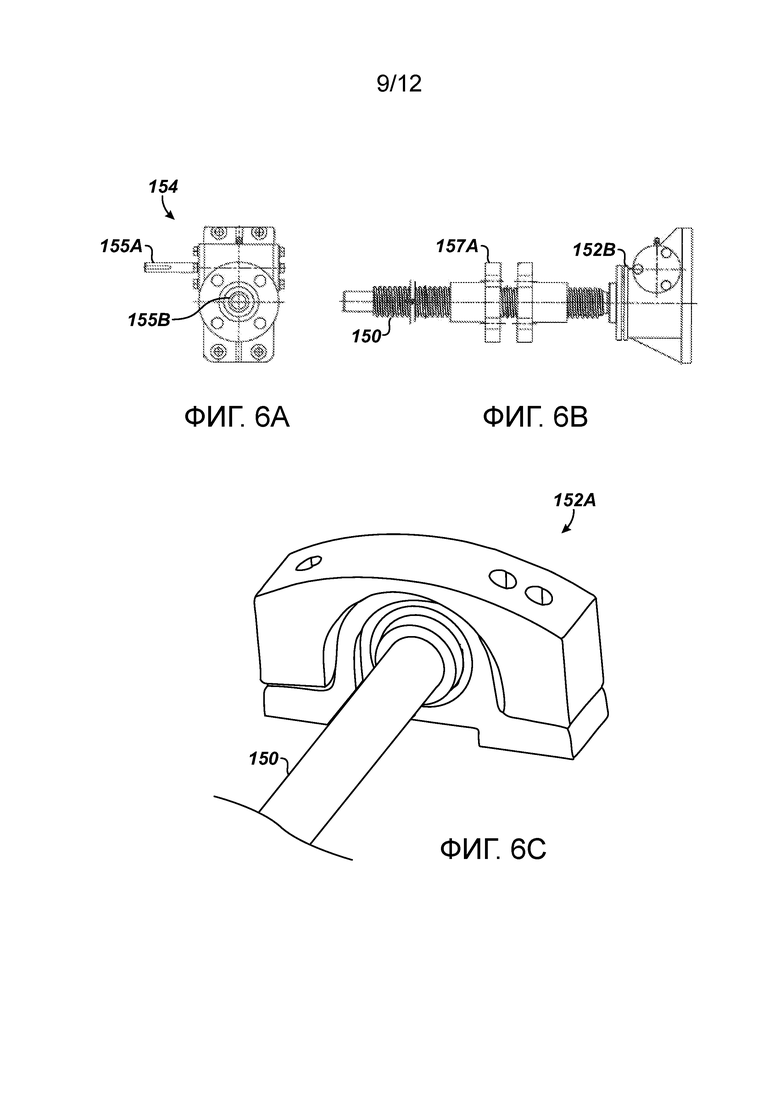
[0051] Подшипниковый узел 152А может представлять собой опорный подшипник, такой как показанный на фиг.6С, который соединен с цилиндрической секцией 110 так, чтобы поддерживать дистальный конец подающего винта 150 червячной передачи. Подающий винт 150 проходит до проксимального конца цилиндрической секции 110 увеличенного размера в верхнем положении и может соединяться с вспомогательным подшипниковым узлом 152В. При этом в эксцентрическом переходнике 120 подающий винт 150 выходит из корпуса 102 с уплотнением 158 высокого давления, таким как показанное на фиг.7.
[0052] Подающий винт 150 продолжается за пределами уплотнения 158 высокого давления и соединяется с выходным валом 155В коробки 154 передач (фиг.6А). Входной вал 155А коробки передач (фиг.6А) может быть использован для размещения двигателя 160 для полностью автоматического или полуавтоматического вариантов осуществления. Как вариант, вал 155А коробки передач может быть выполнен с ручным приводом при использовании возможностей ручного управления.
[0053] В любом случае подающий винт 150 червячной передачи выполнен с возможностью вращения в окружном направлении в пределах цилиндрической секции 110. При этом вращение подающего винта 150 перемещает лопатку 156 запуска вдоль длины подающего винта, таким образом скребки Р могут загружаться в запускающий переходник 120. Лопатка 156, расположенная внутри цилиндрической секции 110, подвижно прикреплена к подающему винту 150 посредством резьбового соединения 157А (фиг.8) и перемещается от дистального конца к проксимальному концу цилиндрической секции 110, проталкивая трубопроводные скребки Р в эксцентрический переходник 120.
[0054] Двигатель 160 может представлять собой электродвигатель, хотя могут быть использованы другие двигатели. Например, может быть использован гидродвигатель, но может требовать пневматического подающего газа для приведения в действие/активации механизма 140 запуска. Большинство пневматических подающих газов предусмотрены посредством природного газа из трубопровода, таким образом насос может приводить в действие гидравлику. Когда пневматический насос осуществляет рабочий ход, может происходить выброс метана, поэтому использование электродвигателя может устранить такой выброс метана.
[0055] Для автоматической работы, электродвигатель 160 может быть соединен с контроллером 170, содержащим программируемое логическое устройство управления и дисплей. Контроллер 170 выполнен с возможностью приведения в действие двигателя 160 на основе запрограммированных временных интервалов, локального управления, дистанционного управления или другой схемы автоматического управления. Дополнительные детали любой автоматической работы описаны ниже.
[0056] Как было отмечено выше, коробка 154 передач и двигатель 160 предпочтительно расположены за пределами цилиндрической секции 110. Поэтому соединение коробки 154 передач с подающим винтом 150 червячной передачи, проходящим через стенку корпуса, использует уплотнение 158 высокого давления, как показано на фиг.7. Уплотнение 158 высокого давления уплотняет удлиненный механизм зубчатого привода от внутреннего давления в трубопроводе, так что он может функционировать за пределами находящейся под давлением части механизма 140 запуска.
[0057] Вообще уплотнение 158 может быть образовано несколькими способами, включая, помимо прочего, одно или более из: уплотнительного кольца либо с обычным либо с одним из множества существующих вариантов поперечного сечения, манжетного вращающегося уплотнения или обычной набивочной коробки (например, набивочной коробки сальникового типа). Для сальникового уплотнения, неплотно сплетенный или как-то иначе деформируемый уплотняющий материал укладывают в полость вокруг вала подающего винта 150, проходящего через цилиндрическую стенку. Уплотнительный сальник/гайка, которая создает большое усилие вдоль оси упомянутого вала, используют для сжатия уплотняющего материала в полости, вынуждая его оказывать давление на стенку полости и поверхность вала. Прилагается достаточное усилие, так что силы сжатия уплотняющего материала превышают давление, и утечка предотвращается. Как будет понятно, площадь уплотнения и набивки уплотнения 158 может быть увеличена с приращением на основе конкретных давлений в трубопроводе и других требований реализации.
[0058] Помимо подающего винта 150, лопатки 156 и других элементов механизма 140 запуска для направления и механической подачи скребков Р в горизонтальном направлении, могут быть использованы и другие механизмы. Например, механизм 140 запуска может использовать двигатель, подающий винт, трос, цилиндр или другой приводной элемент, используемый вместе с лопаткой, салазками, поддоном или т.п. Скребки могут быть также приспособлены для запуска с использованием механизма типа конвейерной ленты.
[0059] Хотя выше были описаны вращающийся подающий винт 150 и лопатка 156 для механизма 100 запуска, для перемещения размещенных скребков Р вдоль длины цилиндрической секции 110 могут быть использованы другие приводы и направляющие. При этом гидравлический или пневматический цилиндры могут содержать рычаги, которые перемещаются внутри цилиндрической секции 110 и проталкивают и/или тянут лопатку 156 внутри цилиндрической секции 110. Лопатка 156 может быть закреплена на рельсах или т.п. Как вариант, может быть использован механизм реечной передачи. Как будет понятно с учетом преимущества настоящего изобретения, эти и другие механизмы могут быть использованы для перемещения скребков в камере 140 запуска.
[0060] Фиг.5В показывает пример механизма 140 запуска, содержащего двигатель 160, который вращает приводной ремень 151 с шестерней 161. Вращение шестерни 161 вперед и назад может вызывать возвратно-поступательное перемещение лопатки 156 на ремне 151 в камере 115 цилиндрической секции 110. Таким образом, скребки Р могут подаваться по отдельности при помощи ленты 151 к участку рядом с проточным патрубком 114, расположенным выше по потоку от линейной секции 130 камеры 100 запуска.
[0061] Фиг.5С показывает другой пример механизма 140 запуска, содержащего двигатель 160, который перемещает линейный исполнительный элемент 153. Например, двигатель 160 может быть гидравлическим, а линейный исполнительный элемент 152 может представлять собой поршень или т.п. Выдвижение и отвод линейного исполнительного элемента 153 может вызывать возвратно-поступательное перемещение лопатки 156 в камере 115 цилиндрической секции 110. Таким образом, скребки Р могут подаваться по отдельности при помощи линейного исполнительного элемента 152 к участку рядом с проточным патрубком 114, расположенным выше по потоку от линейной секции 130 камеры 100 запуска.
[0062] Фиг.5D показывает еще один пример механизма 140 запуска, содержащего двигатель 160, который перемещает конвейерную ленту 155 с шестерней 165. Вращение шестерни 165 вперед и назад может вызывать возвратно-поступательное перемещение конвейерной ленты 151 в камере 115 цилиндрической секции 110. Таким образом, скребки Р могут подаваться по отдельности при помощи ленты 155 к участку рядом с проточным патрубком 114, расположенным выше по потоку от линейной секции 130 камеры 100 запуска.
[0063] Поскольку будут показаны разные механизмы 140 запуска, раскрытые на фиг.5А-5D, несколько разных механизмов, которые направляют и приводят в действие, способны перемещать скребки Р в цилиндрической секции 110 и могут быть использованы с камерой 100 запуска. Соответственно, могут быть использованы эти и другие альтернативы раскрытых механизмов 140 запуска. Кроме того, описание в данном документе может относиться к элемента механизма 140 запуска, показанного на фиг.5А, но необязательно к другим, таким как показанные на фиг.5В-5D. Однако необходимо понимать с учетом преимущества настоящего изобретения, что признаки, описанные в данном документе, могут быть легко приспособлены к разным раскрытым механизмам запуска.
С. Поддон для запуска
[0064] Обычно, но не всегда, поддон 180 для запуска, показанный на фиг.9А-9В, может быть установлен в нижней части цилиндрической секции 110 для размещения множества трубопроводных скребков Р в механизм 140 запуска. Поддон 180 для запуска может быть извлечен из цилиндрической секции 110, загружен конкретным количеством скребков Р и повторно установлен в цилиндрическую секцию 110 для размещения скребков Р для запуска. Вообще поддон 180 для запуска представляет собой канал, в котором скребки Р расположены горизонтально для размещения в механизме 140 запуска.
[0065] Поддон 180 для запуска включает боковые стенки 182 и изогнутое основание 184 для размещения в цилиндрической секции 110. На боковых стенках 182 предусмотрены направляющие рельсы 183, чтобы способствовать удержанию скребков Р на основании 184. Кроме того, направляющие рельсы 183 позволяют направляющим рычагам, таким как рычаги 157b на лопатке 156 на фиг.8, находиться сверху и направлять перемещение лопатки 156 вдоль поддона 180 для запуска, когда лопатку 156 перемещают внутри цилиндрической секции 110. На боковых стенках 182 поддона 180 могут быть также установлены фрикционные направляющие 185 для создания трения на движущиеся скребки Р. Данное заданное трение от направляющих 185, основания 184 и др. на поддон 180 может быть использовано для того, чтобы гарантировать одновременную подачу в переходник 120 только одного скребка Р в конце поддона 180 во время последовательности запуска.
[0066] в зависимости от используемых скребков Р, поддон 180 для запуска может быть не нужен, или конкретный поддон 180 для запуска может содержать регулируемые элементы (например, боковые стенки 182, направляющие рельсы 183 и др.), которые позволяют ему размещать разные типы скребков. Как вариант, для размещения разных типов скребков может быть использован другой поддон для запуска. Например, поддон 180 для запуска необязательно представляет собой открытый тип основания с боковыми стенками 182 и основанием 184. Вместо этого, поддон 180 для запуска может представлять собой удлиненный контейнер для размещения скребков Р и может быть выполнен из перфорированной алюминиевой трубы или т.п., содержащей паз для размещения прохода для лопатки.
D. Контроллер/Автоматика
[0067] Как было отмечено выше, наружный приводной механизм (например, коробка 154 передач, двигатель 160 и др.) приводит в действие механизм 140 запуска. Наружный приводной механизм может быть с ручным, полуавтоматическим и автоматическим управлением. В частности, для осуществления ручного управления механизмом 140 запуска, операторы могут вручную приводить в движение вал 155А червячного приводного механизма при помощи гаечного ключа или двигателя перфоратора, чтобы приводить в движение лопатку 156 скребка по направлению к переходнику 120 для запуска трубопроводного скребка Р. При таком ручном управлении расстояние перемещения лопатки 156 определяется количеством оборотов удлиненного передаточного вала 155А.
[0068] Механизм 140 запуска может быть также с автоматическим или полуавтоматическим управлением. Как было отмечено выше, передаточный вал 155А приводного механизма (например, коробки 154 передач, двигателя 160 и др.) может приводиться в движение двигателем 160, таким как взрывобезопасный электродвигатель, для приведения в движение лопатки 156 для запуска по направлению к переходнику 120 для запуска трубопроводного скребка Р. Управление электродвигателем 160 может осуществляться полуавтоматически посредством оператора с использованием выключателя «включено-выключено» до требуемого расстояния перемещения лопатки. Как вариант, управление электродвигателем 160 может осуществляться автоматически посредством программируемой логики контроллера 170.
[0069] Вообще, контроллер 170 может включать в себя панель управления, которая может отображать экраны управления дисплеем для программирования конкретного интервала запуска, времени запуска, дистанционного приведения в действие или другой операции. Программирование контроллера 170 осуществляется в соответствии с типом скребка и длиной скребка. В свою очередь, контроллер 170 управляет электродвигателем 160 и расстоянием перемещения лопатки 156 для запуска трубопроводных скребков Р. Короче говоря, контроллер 170 управляет активацией механизма 140 запуска для работы в полуавтоматическом режиме.
[0070] Контроллер 170 может содержать Ethernet-соединение или другое соединение для дистанционного доступа к механизму 140 запуска для осуществления текущего контроля функционирования и/или управления запуском трубопроводного скребка Р. Контроллер 170 также работает как терминал для осуществления текущего контроля за проходами скребков с использованием приемника сигналов из удаленного сигнализатора скребка, и контроллер 170 может осуществлять текущий контроль за величиной тока во время работы камеры 100 запуска, помимо других операций текущего контроля.
[0071] Контроллер 170 может содержать соединения (или может использовать любые сигналы из) с датчиками расхода, детекторами скребков или другими сенсорными устройствами, и контроллер 170 может использовать такие сигналы для автоматического управления работой камеры 100 запуска. Например, контроллер 170 может содержать несколько вспомогательных терминалов для выполнения различных функций. В частности, контроллер 170 может использовать сигнализатор 137 скребка, расположенный на номинальной трубной секции 130 непосредственно ниже по потоку от эксцентрического переходника 120. Сигналы из сигнализатора 137 скребка могут быть использованы контроллером 170 для подтверждения прохода скребка Р всякий раз, когда механизм 140 запуска запускает скребок Р.
[0072] Контроллер 170 может также принимать сигнал из сигнализатора, расположенного ниже по потоку от изолирующего клапана 32 магистрали, прикрепленного к камере 100 запуска скребков, для подтверждения прохождения скребка, и контроллер 170 может использовать данную информацию для того, чтобы определять, что скребок проходит через трубопровод L, всякий раз, когда механизм 170 запуска запускает скребок Р. Кроме того, контроллер 170 может содержать клеммное соединение с дистанционно управляемым клапаном, которое может действовать как отказоустойчивый механизм. В этом смысле контроллер 170 может автоматически отключать камеру 100 запуска скребков в любой момент, когда изолирующий клапан 32 магистрали закрывается.
[0073] Фиг.10А-10D показывают примерные экраны 176a-d интерфейса пользователя для программирования контроллера 170 для управления раскрытой камерой 100 запуска. На фиг.10А, первый экран 176а показывает пример того, как оператор может устанавливать количество скребков Р, которые должны быть загружены в камеру 100 запуска. Если используются скребки Р разной длины, то может быть введена длина каждого скребка Р. Может быть также введено время запуска для разных скребков Р. Количество скребков Р в цилиндрической секции 100 и положение лопатки 156 внутри секции 100 могут быть известны и отображены на экране. Средства управления в ручном режиме или блокировки автоматического управления могут также позволять операторам вручную осуществлять возвратно-поступательное перемещение лопатки 156.
[0074] Экран 176b на фиг.10В показывает некоторую информацию ввода и управления контроллера 170. Экран 176с на фиг.1°C показывает как оператор может устанавливать разные интервалы запуска для разных скребков Р и может устанавливать, когда должен быть осуществлен первый запуск. И наконец экран 176d на фиг.10D показывает как может быть введена длина данного скребка Р, таким образом контроллер 170 может отслеживать положение скребка Р в секции 110 и требуемое перемещение лопатки 156 и т.п. для запуска скребка Р.
[0075] Как показывают данные экраны 176a-d интерфейса пользователя, программирование контроллера 170 настоящего изобретения может быть осуществлено разными способами и с несколькими вводами для управления работой раскрытой камеры 100 запуска. Как будет понятно, могут быть использованы эти и другие вводы и средства управления.
Е. Работа
[0076] Во время работы, камера 100 запуска скребков может размещать множество трубопроводных скребков Р из горизонтально ориентированного механизма 140 запуска и может запускать один скребок Р из корпуса 102 в жидкую или газовую перекачиваемую среду из его горизонтальной ориентации. Механизм 140 запуска может быть с полностью автоматическим, полуавтоматическим или ручным управлением и может запускать разные типы скребков Р на контролируемой основе.
[0077] При полностью автоматической работе операторы могут запрограммировать контроллер 170 так, чтобы приводить в движение электрический механизм 140 запуска скребков с редукторным приводом на основе длины трубопроводного скребка и других факторов. Таким образом, механизм 140 запуска может запускать один скребок Р и может размещать множество трубопроводных скребков Р даже в условиях низкого расхода.
[0078] При понимании камеры 100 запуска скребков и ее элементов, приведено конкретное описание работы камеры 100 запуска скребков для очистки трубопровода. Первоначально все клапаны должны находиться в закрытом положении, чтобы инициировать работу механизма 140 запуска скребков. Например, закрытые клапаны на корпусе 102, как на фиг.2А, включают изолирующий клапан 32 магистрали, проточный клапан 34 для проточного патрубка 114, продувочный клапан 38 для продувочного патрубка 112, выпускной клапан 36 для выпускного патрубка 116 и дренажный клапан (не показанный) для дренажного патрубка 118. Последовательность запуска скребков инициируется посредством открытия крышки 111, расположенной на входе 104А цилиндрической секции 110 увеличенного размера после сброса давления из всей системы запуска посредством открытия продувочного патрубка 112 системы, расположенного в верхней части.
[0079] Лопатку 156 для запуска снимают с подающего винта 150, и поддон 180 для запуска, если используется, извлекают на входе 104А из цилиндрической секции 110 увеличенного размера в дистальном направлении. Скребки Р загружают в поддон 180 для запуска, и поддон 180 для запуска снова вводят в цилиндрическую секцию 110 увеличенного размера. Если поддон 180 для запуска не используется, то скребки Р загружают прямо в цилиндрическую секцию 110 увеличенного размера.
[0080] Дверь 111 для доступа закрывают, при этом клапан 38 для продувочного патрубка 112 закрывают, чтобы обеспечить повышение давления в камере 100 запуска. Медленно открывают проточный клапан 34, чтобы выравнивать давление между камерой 100 запуска и линией L. На протяжении всей работы механизма 140 запуска клапан 34 проточного патрубка будет оставаться в открытом положении. Как только давление в автоматической камере 100 запуска выравнивается, открывается клапан 32 магистрали.
[0081] При подготовке к работе, контроллер 170 может быть запрограммирован для полностью автоматической работы, как показано на примерных экранах 176 на фиг.13. В контроллер 170 вводят длину скребка, количество скребков, график для запуска первого скребка и интервал для последующих запусков. Контроллер 170 будет приводить в движение скребок конкретной длины в запланированное время на основе расстояния перемещения лопатки 156 для запуска в проксимальном направлении в эксцентрический переходник 120.
[0082] Как вариант, операции запуска в полуавтоматическом режиме могут осуществляться посредством приведения в действие электродвигателя 160 в течение заданного периода времени на основе измеренной длины скребка и расстояния перемещения лопатки 156 для запуска в проксимальном направлении в эксцентрический переходник 120. При данной полуавтоматической работе камера 100 запуска необязательно должна быть оборудована контроллером 170, поскольку полуавтоматическое функционирование может осуществляться при помощи двигателя 160 для приведения в действие механического механизма 140 запуска.
[0083] Как было отмечено выше, ручное управление может быть также осуществлено посредством вращения вала 155А коробки передач на необходимое количество оборотов для приведения в движение лопатки 156 для запуска на измеренную длину одного скребка Р в проксимальном направлении к эксцентрическому переходнику 120. Для реализации работы в режиме ручного управления, камера 100 запуска не требует двигателя 160 или контроллера 170, поскольку управление камерой 100 запуска осуществляется вручную для приведения в действие механического механизма 140 запуска.
[0084] Вышеприведенное описание предпочтительных и других вариантов осуществления не имеет целью ограничить объем или применимость идей настоящего изобретения, предложенных заявителями. Необходимо понимать с учетом преимущества настоящего изобретения, что признаки, описанные выше в соответствии с любым вариантом осуществления или аспектом раскрытого объекта патентования, могут быть использованы в отдельности или в комбинации с любым другим описанным признаком, в любом другом варианте осуществления или аспекте раскрытого объекта патентования.
[0085] Хотя камера 100 запуска скребков описана как используемая горизонтально при установке, это не является строго обязательным, поскольку камера 100 запуска может быть использована в других ориентациях и может быть даже расположенным под наклоном. По существу предполагается, что камера 100 запуска может быть ориентированной вертикально с лопаткой 156, задвигающей скребки Р вверх в трубопровод или вниз в трубопровод. В случае подачи вверх, расположенная под наклоном или вертикальная камера 100 запуска, возможно, не потребует значительного изменения для размещения скребков Р, вводимых по отдельности в трубопровод. Однако в случае подачи вниз, может потребоваться гидравлический механизм (ось или т.п.) для застопоривания продвижения скребков Р в расположенной под углом или вертикальной камере 100 запуска.
[0086] В обмен на раскрытие идей настоящего изобретения, содержащихся в данном документе, заявители испрашивают все патентные права, предоставляемые прилагаемой формулой изобретения. Таким образом, предполагается, что прилагаемая формула включает в полной мере все модификации и изменения, которые находятся в пределах объема приведенной ниже формулы или ее эквивалентов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ТУРБИННОГО ДВИГАТЕЛЯ И СПОСОБ ЕГО ЧИСТКИ | 2013 |
|
RU2614472C2 |
| СИСТЕМА ПОДАЧИ ЖИДКОСТИ ДЛЯ РАСПЫЛИТЕЛЬНОГО УСТРОЙСТВА С ПОДАЧЕЙ САМОТЕКОМ | 2011 |
|
RU2509611C1 |
| СИСТЕМА ЗАПУСКА СКРЕБКА С НАПРАВЛЕННЫМ СТРУЙНЫМ ИМПУЛЬСОМ И СПОСОБ ЕЕ ПРИМЕНЕНИЯ | 2018 |
|
RU2776831C2 |
| КОНДЕНСАТНО-ГАЗОВЫЕ СООТНОШЕНИЯ УГЛЕВОДОРОДСОДЕРЖАЩИХ ТЕКУЧИХ СРЕД | 2015 |
|
RU2715724C2 |
| Кавитационное устройство для снижения вязкости нефти и нефтепродуктов | 2022 |
|
RU2793035C1 |
| Система для поточной внутренней очистки выходных каналов коксовых печей посредством скребка и отслаивания и соответствующий способ | 2014 |
|
RU2637332C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ГЕНЕРИРОВАНИЯ ИМПУЛЬСОВ В СТОЛБЕ ФЛЮИДА В СКВАЖИНЕ | 2014 |
|
RU2651822C1 |
| ПЫЛЕСБОРНОЕ УСТРОЙСТВО ПЫЛЕСОСА (ВАРИАНТЫ) | 2005 |
|
RU2314741C2 |
| УСТРОЙСТВО ВЗАИМОДЕЙСТВИЯ С ПАЦИЕНТОМ ДЛЯ ДЫХАТЕЛЬНОЙ ТЕРАПИИ | 2008 |
|
RU2449813C2 |
| СПОСОБ ФОРМОВАНИЯ НЕТКАННОГО ВОЛОКНИСТОГО ПОЛОТНА ИЗ ПЕНОВОЛОКНИСТОЙ СМЕСИ С ИСПОЛЬЗОВАНИЕМ ПРОЦЕССА РАЗБАВЛЕНИЯ ПЕНОЙ | 2000 |
|
RU2209265C2 |


Группа изобретений относится к трубопроводному транспорту и может быть использована для очистки трубопровода без прерывания транспортировки. Система очистки трубопровода содержит устройство для запуска одного или более скребков в технологический поток. Упомянутое устройство содержит корпус с камерой, входом и выходом. Упомянутый вход принимает упомянутый один или более скребков в камеру и выполнен с возможностью уплотнения. Упомянутый выход находится в уплотненном сообщении с технологическим потоком и выпускает упомянутый один или более скребков из камеры в технологический поток. Часть камеры находится в сообщении с технологическим потоком. Направляющая, расположенная в камере, направляет упомянутый один или более скребков в камере, и привод механически подает упомянутый один или более скребков, направляемых посредством упомянутой направляющей, к выходу. 2 н. и 38 з.п. ф-лы, 25 ил.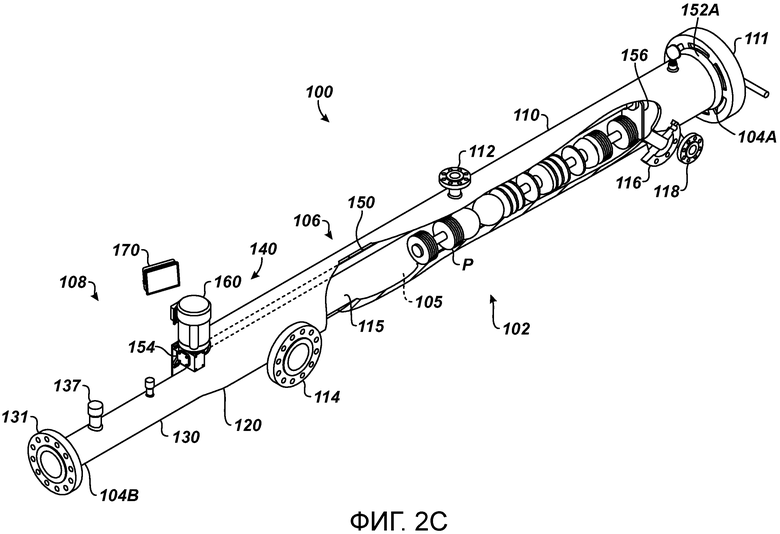
1. Устройство для запуска одного или более скребков в технологический поток, содержащее:
корпус, образующий камеру с длиной и содержащий вход и выход, причем вход принимает один или более скребков в камеру, причем выход сообщается с технологическим потоком и выпускает один или более скребков из камеры в технологический поток, при этом часть камеры сообщается с технологическим потоком; и
механизм запуска для запуска одного или более скребков из камеры, причем механизм запуска содержит:
направляющую, расположенную в камере и направляющую один или более скребков в камере, направляющая перемещаема вдоль длины камеры от входа к выходу; и
привод, функционально соединенный с направляющей и механически подающий один или более скребков, направляемых посредством направляющей вдоль длины камеры к выходу.
2. Устройство по п.1, в котором направляющая содержит лопатку, и при этом привод функционально соединен с упомянутой лопаткой.
3. Устройство по п.2, в котором привод содержит двигатель, вращающий винт, проходящий вдоль длины камеры, причем лопатка соединена с винтом и выполнена с возможностью перемещения вдоль него при вращении винта.
4. Устройство по п.2, в котором привод содержит двигатель, который перемещает ленту, проходящую вдоль длины камеры, причем лопатка соединена с лентой и перемещаема посредством перемещения ленты.
5. Устройство по п.2, в котором привод содержит линейный исполнительный элемент, который проходит вдоль длины камеры, причем лопатка соединена с линейным исполнительным элементом и перемещаема посредством перемещения линейного исполнительного элемента.
6. Устройство по п.5, в котором линейный исполнительный элемент содержит гидравлический поршень, пневматический цилиндр или двигатель.
7. Устройство по п.1, в котором направляющая содержит конвейерную ленту, имеющую одни или более скребков, расположенных на ней; и причем привод содержит двигатель, перемещающий конвейерную ленту вдоль длины камеры.
8. Устройство по п.1, в котором направляющая и привод содержат одно или более из двигателя, ленты, подающего винта, троса, цилиндра, рычага, рельса, реечного механизма, лопатки, салазок, поддона и конвейера.
9. Устройство по любому из пп. 1-8, в котором механизм запуска дополнительно содержит поддон, установленный в камере и удерживающий на себе один или более скребков.
10. Устройство по п.9, в котором поддон представляет собой канал, содержащий основание и боковые стенки.
11. Устройство по п.9 или 10, в котором по меньшей мере часть поддона выполнена с возможностью регулирования для размещения разных размеров упомянутого одного или более скребков.
12. Устройство по любому из пп. 1-11, дополнительно содержащее контроллер, функционально соединенный с приводом и управляющий механической подачей одного или более скребков к выходу.
13. Устройство по п.12, в котором контроллер выполнен с возможностью программирования для управления механической подачей на основе одного или более из длины одного или более скребков, количества одного или более скребков, графика для запуска первого из одного или более скребков и интервала для последующего запуска следующего скребка из одного или более скребков.
14. Устройство любому из пп. 1-13, в котором упомянутый корпус образует переходник между камерой и выходом, причем переходник эксцентрически переходит от большего внутреннего размера камеры к меньшему внутреннему размеру выхода.
15. Устройство по любому из пп. 1-14, в котором выход содержит фланец, соединяющийся с трубопроводом технологического потока.
16. Устройство по любому из пп. 1-15, в котором вход содержит крышку, выполненную с возможностью герметизации для открытия и закрытия доступа в упомянутую камеру.
17. Устройство по любому из пп. 1-16, в котором упомянутая часть камеры, сообщающаяся с технологическим потоком, содержит канал на корпусе в сообщении между технологическим потоком и участком камеры, расположенным выше по потоку от выхода, причем канал направляет часть технологического потока в камеру, расположенную выше по потоку от упомянутого выхода.
18. Устройство по п.17, дополнительно содержащее проточный клапан, соединенный с каналом и выполненный с возможностью пропускания части технологического потока из канала в выход.
19. Устройство по п.18, дополнительно содержащее магистральный клапан в сообщении между выходом и технологическим потоком, причем магистральный клапан является управляемым для направления упомянутого одного или более скребков и любой направляемой части технологического потока из камеры в технологический поток.
20. Устройство по п.18 или 19, дополнительно содержащее продувочный клапан в сообщении с камерой и являющийся управляемым для направления продувки в упомянутую камеру.
21. Устройство по п.18, 19 или 20, дополнительно содержащее выпускной клапан в сообщении между технологическим потоком и камерой рядом с упомянутым входом, причем упомянутый выпускной клапан является управляемым для направления выброса технологического потока в упомянутую камеру.
22. Устройство по любому из пп. 1-21, дополнительно содержащее дренажный клапан в сообщении с камерой и являющийся управляемым для отвода текучей среды из упомянутой камеры.
23. Устройство по любому из пп. 1-22, в котором выход содержит индикатор, регистрирующий прохождение одного или более скребков.
24. Устройство по любому из пп. 1-23, в котором направляющая является перемещаемой непрерывно вдоль длины камеры от входа к выходу; и причем привод, функционально соединенный с направляющей, перемещает множество из одного или более скребков (Р) вместе вдоль длины камеры с поверхностью направляющей от входа к выходу и механически подает каждый из скребков последовательно от первого до последнего к выходу.
25. Способ запуска одного или более скребков в технологический поток, включающий:
герметизацию одного или более скребков в камере с длиной;
направление одного или более скребков посредством направляющей в камере к выходу камеры, находящейся в сообщении с технологическим потоком;
механическую подачу одного или более скребков в камере к выходу посредством перемещения направляющей вдоль длины камеры от входа к выходу; и
запуск каждого из механически подаваемых скребков из выхода в технологический поток посредством направления части технологического потока в сообщении с камерой, расположенной выше по потоку от выхода.
26. Способ по п.25, в котором направление упомянутого одного или более скребков в камере включает продвижение упомянутого одного или более скребков посредством лопатки в упомянутой камере.
27. Способ по п.26, в котором механическая подача одного или более направляемых скребков в камере к выходу включает приведение в действие привода для перемещения лопатки в камере.
28. Способ по п.27, в котором приведение в действие привода для перемещения лопатки в камере включает приведение в действие двигателя и вращение винта, причем винт проходит вдоль длины камеры и функционально соединен с упомянутой лопаткой.
29. Способ по п.28, в котором приведение в действие привода для перемещения лопатки в камере включает приведение в действие двигателя и перемещения ленты, причем лента проходит вдоль длины камеры и функционально соединена с лопаткой.
30. Способ по п.28, в котором приведение в действие привода для перемещения лопатки в камере включает приведение в действие линейного исполнительного элемента, который проходит вдоль длины камеры, и перемещение лопатки, функционально соединенной с линейным исполнительным элементом.
31. Способ по п.30, в котором линейный исполнительный элемент содержит гидравлический поршень, пневматический цилиндр или двигатель.
32. Способ по п.25, в котором механическая подача одного или более подаваемых скребков в камере к выходу посредством перемещения направляющей вдоль длины камеры включает в себя управление двигателем и перемещение конвейерной ленты, проходящей вдоль длины камеры и имеющей один или более скребков, расположенных на ее поверхности.
33. Способ по любому из пп. 25-32, в котором направление одного или более скребков в камере включает удерживание одного или более скребков в поддоне, установленном в камере.
34. Способ по любому из пп. 25-33, в котором механическая подача одного или более скребков в камере к выходу включает программное управление механической подачей на основе одного или более из длины одного или более скребков, количества одного или более скребков, графика для запуска первого из одного или более скребков и интервала для последующего запуска следующего скребка из одного или более скребков.
35. Способ по любому из пп. 25-34, в котором направление одного или более скребков в камере к выходу камеры, находящейся в сообщении с технологическим потоком, включает в себя эксцентрический переход от большего внутреннего размера камеры к меньшему внутреннему размеру выхода.
36. Способ по любому из пп. 25-35, в котором герметизация упомянутого одного или более скребков в камере включает закрытие доступа в камеру.
37. Способ по любому из пп. 25-36 , в котором направление части технологического потока в сообщении с камерой выше по потоку от выхода включает открытие проточного клапана в сообщении между технологическим потоком и частью камеры, расположенной выше по потоку от выхода.
38. Способ по п.37, дополнительно включающий открытие магистрального клапана в сообщении между выходом и технологическим потоком для направления одного или более скребков и любой направляемой части технологического потока из камеры в технологический поток.
39. Способ по любому из пп. 25-38, дополнительно включающий регистрацию прохождения одного или более скребков на выходе.
40. Способ по любому из пп. 25-39, в котором механическая подача и запуск содержат:
механическую подачу каждого из множества из одного или более направляемых скребков в камере последовательно от первого до последнего к выходу за счет перемещения направляющей непрерывно вдоль длины камеры от входа к выходу; и
запуск каждого последовательно поданного скребка из выхода в технологический поток посредством направления части технологического потока в сообщении с камерой, расположенной выше по потоку от выхода.
| US 6022421 A, 08.02.2000 | |||
| US 4709719 A, 01.12.1987 | |||
| US 6336238 B1, 08.01.2002 | |||
| УСТРОЙСТВО ЗАПУСКА-ПРИЕМА ПОТОЧНЫХ СРЕДСТВ В ТРУБОПРОВОД | 1996 |
|
RU2103596C1 |

